DATA WYKONANIA: 10,03,2002
GRUPA: LTS-1 |
LABORATORIUM MECHANIKI TECHNICZNEJ |
NUMER ĆWICZENIA: 6
PODGRUPA: 3 |
ĆWICZENIE NR 6
WYZNACZANIE MOMENTÓW BEZWŁADNOŚCI
I ŚRODKA CIĘŻKOŚCI BRYŁ I FIGUR PŁASKICH
SKŁAD PODGRUPY:
|
OCENY: |
1. Kokoszka Piotr 2. Krasuski Andrzej 3. Kaczanowski Michał 4. Dębski Łukasz |
|
SPRAWOZDANIE
1. Cel ćwiczenia.
.
Celem ćwiczenia jest doświadczalne wyznaczenie momentów bezwładności brył obroto wych, oraz środków ciężkości brył nieregularnych . Zakres materiału teoretycznego niezbędny do zrozumienia ćwiczenia obejmuje :analityczne wyznaczenie masowych momentów bezwładności brył obrotowych względem osi , drgania swobodne układów dyskretnych o jednym stopniu swobody , kinematykę i dynamikę bryły sztywnej w ruchu obrotowym .
W ćwiczeniu wyznaczone zostaną doświadczalnie momenty bezwładności 3 brył obrotowych.
2.Wprowadzenie teoretyczne .
Momentem bezwładności ciała materialnego względem dowolnie obranej osi nazywamy granicę, do której dąży suma iloczynów mas elementów, na które podzieliliśmy ciało, przez kwadraty odległości tych elementów od wspomnianej osi, gdy liczba elementów dąży do nieskończoności przy jednoczesnym dążeniu do zera ich wymiarów .
I = lim
Identycznie możemy zdefiniować moment bezwładności układu punktów materialnych względem punktu 0 oraz względem płaszczyzny . Otrzymamy więc :
I=
I=
Ponieważ masy mdążą do zera przy ilości dążącej do nieskończoności, możemy to zastąpić całką:
I==dV
gdzie -gęstość ciała.
odległość cząstki masy (objętości) od osi z.
Ponieważ jednak h=x+y otrzymujemy:
I=
I=
I=
Poszczególne całki z powyższych wzorów nazywamy momentami względem płaszczyzn układu współrzędnych.
Twierdzenie Steinera, Mówi nam iż moment bezwładności ciała względem dowolnego punktu 0 jest równy sumie momentu względem środka masy C i iloczynu masy ciała przez kwadrat odległości danego punktu od środka masy .
I=I+mr
W analizie dynamicznej zachowania się ciał sztywnych wprowadza się pojęcie momentów odśrodkowych, zwanych również momentami dewiacyjnymi lub momentami zboczenia. Z definicji momentem odśrodkowym ciała względem dwóch prostopadłych płaszczyzn nazywamy granicę sumy iloczynu mas elementów ciała przez odległość tych elementów od danych płaszczyzn. Można więc przykładowy moment odśrodkowy względem np. płaszczyzny XY i YZ prostokątnego układu współrzędnych określić wzorem
I=
Momenty odśrodkowe mogą przyjmować wartości zarówno dodatnie, jak i ujemne. Można więc zauważyć, że jeśli ciało ma płaszczyznę symetrii, to moment odśrodkowy to moment odśrodkowy względem tej płaszczyzny i płaszczyzny do niej prostopadłej jest równy zeru. Jeżeli momenty odśrodkowe dowolnego ciała względem trzech par płaszczyzn układu współrzędnych są równe zeru, to osie współrzędnych są głównymi osiami bezwładności tego ciała. Jeżeli początek tych osi znajduje się w środku masy ciała, to osie te nazywają się głównymi centralnymi osiami bezwładności ciała.
Jednostką momentów bezwładności figur płaskich jest m. Całkowanie w powyższych zależnościach odbywa się po powierzchni przekroju.
Wyznaczanie momentów bezwładności.
W ruchu obrotowym jednostajnym przyśpieszenie kątowe wynosi
ε = = = ε0 = const
po scałkowaniu tego równania względem czasu t znajdujemy prędkość kątową
ω = = ε0t + ω0
z tego wzoru wyznaczamy prędkość początkową ω0 i przyśpieszenie ε0 ponieważ znamy prędkości kątowe ω1, ω2 odpowiadające znanym chwilom czasowym t1 i t2
ω0 = ε0 =
ponieważ ω0 = ω1 , ω2 = 0 i t2 = tp (czas pomierzony) to przyśpieszenie kątowe wynosi
ε0 = -
Moment hamujący obliczamy ze wzoru
M = Iε0 = -I
3. Przebieg ćwiczenia.
Schemat stanowiska pomiarowego dla metody pomiaru czasu wybiegu przedstawiono poniżej.
Rys. 1. Stanowisko pomiarowe (metoda I).
1 - rama,
2 - silnik elektryczny,
3, 4 - sprzęgła,
5 - podpora łożyskowa wału,
6 - przesuwna podpora łożyskowa wału,
7 - prądnica tachometryczna,
8 - przedmiot o memencie bezwładności II
9 - przedmioty o mementach bezwładności III i IIII ,
10 - śruby mocujące podporę 6,
11, 12 - wałki ,
Ćwiczenie rozpoczynamy od założenia na końcówki wałków 11 i 12 przedmiotu 8 po czym zbliżamy maksymalnie podporę 6 w kierunku silnika 2. Następnie włączamy silnik i czekamy, aż osiągnie stałą prędkość kątową obserwując wskazania tachometru. Przy ustalonej liczbie obrotów notujemy prędkość obrotową n0. Kolejną czynnością jest wyłączenie silnika i jednoczesne włączenie stopera, w momencie kiedy układ przestaje wirować, stoper zatrzymujemy a czas wybiegu tp zapisujemy.
Dokonujemy pomiaru wymiarów geometrycznych przedmiotu (bryły) , które zapisujemy oraz wartość momentu bezwładności wirnika silnika i sprzęgła Iw.
Metoda ta opiera się na drugim prawie dynamiki Newtona dla ruchu obrotowego, które mówi, że ruch jednostajnie przyspieszony (opóźniony) jest skutkiem działania stałego co do wartości niezrównoważonego momentu zgodnie z zależnością :
gdzie: I - moment bezwładności względem osi obrotu ciała ,
ε0 - przyspieszenie kątowe,
ω0 - początkowa prędkość kątowa,
tp - czas po jakim prędkość kątowa osiągnie wartość ω=0,
n - początkowa liczba obrotów układu,
Znak minus oznacza, że analizowany ruch jest ruchem jednostajnie opóźnionym.
Moment hamujący wyznaczono doświadczalnie dla bryły 2, a następnie wykorzystano go do doświadczalnego wyznaczenia momentów brył 1 i 3. W celu wyznaczenia momentu hamującego obliczono analitycznie moment bezwładności bryły 1 i obliczono wartość opóźnienia, wykorzystując średni czas zatrzymania układu.
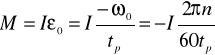
BRYŁA 1
W celu analitycznego wyznaczenia momentu bryły 1 podzielono ją myślowo na cztery jednorodne , współosiowe walce i zsumowano ich momenty względem wspólnej osi.
I = I1 + I2 + I3 - I4
Analitycznie obliczam moment bezwładności bryły 1 korzystając ze związku;
; gdzie:
Obliczam moment i :
Dane:=H2=20 [mm]=0.02 [m]
=R2= 28.5 [mm]=0.0285 [m]
{dla wszystkich obliczeń}
Po podstawieniu otrzymuję: ==0.4 [kg] oraz I1=I2=1,6 .10-4[kg⋅m2]
Obliczam moment:
Dane:=39 [mm]=0.039 [m]
=65 [mm]=0.065 [m]
Po podstawieniu otrzymuję: =4,08 [kg] oraz I3=86,19.10-4[kg⋅m2]
Obliczam moment (dla wydrążonego środka):
Dane:=79[mm]=0.079[m]
=10 [mm]=0.01[m]
Po podstawieniu otrzymuję: =0,2 [kg] oraz I4=0,1.10-4[kg⋅m2]
Moment bezwładności bryły 1 wynosi:
IIobl=89,29.10-4[kg⋅m2]
Masa bryły 1 wynosi: M1=4,68 [kg]
Obliczam moment bezwładności bryły 1 z danych pomiarowych.
W tym celu obliczam czas średni i przyśpieszenie kątowe:
tp=(Sni=1) ti=5,35 [s] =[(-2.n):60tp]=27,97[rad/s2]
Aby obliczyć moment bezwładności wyznaczam moment hamujący. Moment hamujący działający na układ wyznaczam ze wzoru:
M = I * ε0
Jako I przyjęto sumę momentu obliczonego analitycznie i momentów związanych ze stanowiskiem pomiarowym; I = IoblI + IW
gdzie: IW - moment bezwładności wirnika, silnika i sprzęgła = 1.57 * 10-4[kg*m2],
ρ - gęstość materiału wałków wynosząca 7.86 * 103 [kg/m3]
czyli ;
II=90,86.10-4[kg⋅m2]
więc ; M2541,35.10-4[kg⋅m2]
Następnie wyliczam moment dla każdego pomiaru czasu oddzielnie M1, M2, M3 z których obliczam
Mśr=(M1+M2=M3):3=2539,04.10-4[kg⋅m2]
Ponieważ moment z pomiaru liczy się korzystniej ze wzoru:
II=(Mśr:0)-Iw=89,21.10-4[kg⋅m2]
Nr pomiaru |
Prędkość obrotowa n0 [obr/min] |
Czas wybiegu
TP [s] |
Moment analityczny IIobl [kg⋅m2] |
Moment z pomiaru II [kg⋅m2] |
1 |
1430 |
5,28 |
89,29. 10-4 |
89,21⋅10-4 |
2 |
1430 |
5,41 |
89,29 ⋅10-4 |
89,21⋅10-4 |
3 |
1430 |
5,38 |
89,29⋅10-4 |
89,21⋅10-4 |
|
|
|
Iśr=89,25⋅10-4 |
|
Moment średni obliczono jako średnią arytmetyczną momentu obliczonego analitycznie i momentu wyznaczonego z pomiaru.
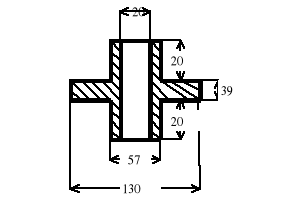
BRYŁA 2
W celu analitycznego wyznaczenia momentu bryły 2 podzielono ją myślowo na trzy jednorodne , współosiowe walce i zsumowano ich momenty względem wspólnej osi.
61 I = I1 + I2 - I3 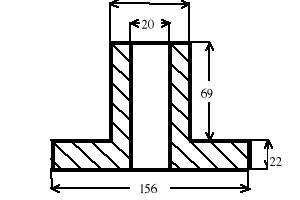
Analitycznie obliczam moment bezwładności bryły 2 korzystając ze związku;
; gdzie:
Obliczam moment:
Dane:=22 [mm]=0.022 [m]
=78 [mm]=0.078 [m]
{dla wszystkich obliczeń}
Po podstawieniu otrzymuję: =3.3 [kg] oraz I1 =100,4⋅10-4[kg⋅m2]
Obliczam moment:
Dane:=69 [mm]=0.069 [m]
=30,5 [mm]=0.0305 [m]
Po podstawieniu otrzymuję: =1.58 [kg] oraz I2 =7,35⋅10-4[kg⋅m2]
Obliczam moment (dla wydrążonego środka):
Dane:=91 mm]=0.091 [m]
=10 [mm]=0.01[m]
Po podstawieniu otrzymuję: =0.22 [kg] oraz
Moment bezwładności bryły 2 wynosi:
IIIobl=107,64.10-4[kg⋅m2]
Masa bryły 2 wynosi: M2=4.66 [kg]
Obliczam moment bezwładności bryły 2 z danych pomiarowych.
W tym celu obliczam czas średni i przyśpieszenie kątowe:
tp=(Sni=1) ti=7,25 [s] =[(-2.n):60tp]=20,64[rad/s2]
Moment z pomiaru wynosi:
III=(Mśr:0)-Iw=121,45[kg⋅m2]
Nr pomiaru |
Prędkość obrotowa n0 [obr/min] |
Czas wybiegu
TP [s] |
Moment analityczny IIIobl [kg⋅m2] |
Moment z pomiaru III [kg⋅m2] |
1 |
1430 |
7,25 |
107,64⋅10-4 |
121,45⋅10-4 |
2 |
1430 |
7,28 |
107,64⋅10-4 |
121,45⋅10-4 |
3 |
1430 |
7,23 |
107,64⋅10-4 |
121,45⋅10-4 |
|
|
|
Iśr=114,55⋅10-4 |
|
Moment średni obliczono jako średnią arytmetyczną momentu obliczonego analitycznie i momentu wyznaczonego z pomiaru.
@@ BRYŁA 3
W celu analitycznego wyznaczenia momentu bryły 3 podzielono ją myślowo na cztery jednorodne , współosiowe walce i zsumowano ich momenty względem wspólnej osi.
I = I1 + I2 + I3 --I4
Analitycznie obliczam moment bezwładności bryły 2 korzystając ze związku;
; gdzie:
Obliczam moment i :
Dane:=44 [mm]=0.044 [m]
=28.5 [mm]=0.0285 [m]
{dla wszystkich obliczeń}
Po podstawieniu otrzymuję: ==0,88 [kg] oraz I1=I2=3,57 .10-4[kg⋅m2]
Obliczam moment:
Dane:=34[mm]=0.034[m]
=84,5 [mm]=0.0845 [m]
Po podstawieniu otrzymuję: =6,17 [kg] oraz I3=219,79 .10-4[kg⋅m2]
Obliczam moment (dla wydrążonego środka):
Dane:=122[mm]=0.0122[m]
=10 [mm]=0.01[m]
Po podstawieniu otrzymuję: =0.3 [kg] oraz I4=0,15 .10-4[kg⋅m2]
Moment bezwładności bryły 3 wynosi:
IIIIobl =226,78.10-4[kg⋅m2]
Masa bryły 3 wynosi: M3=7,65 [kg]
Obliczam moment bezwładności bryły 3 z danych pomiarowych.
W tym celu obliczam czas średni i przyśpieszenie kątowe:
tp=(Sni=1) ti=16,47 [s] =[(-2.n):60tp]=9,1[rad/s2]
Moment z pomiaru wynosi: IIII=(Mśr:0)-Iw=277,45[kg⋅m2]
Nr pomiaru |
Prędkość obrotowa n0 [obr/min] |
Czas wybiegu
TP [s] |
Moment analityczny IIIIobl [kg⋅m2] |
Moment z pomiaru IIII [kg⋅m2] |
1 |
1430 |
16,59 |
226,78⋅10-4 |
277,45⋅10-4 |
2 |
1430 |
16,59 |
226,78⋅10-4 |
277,45⋅10-4 |
3 |
1430 |
16,24 |
226,78⋅10-4 |
277,45⋅10-4 |
|
|
|
Iśr=252,13⋅10-4 |
|
Moment średni obliczono jako średnią arytmetyczną momentu obliczonego analitycznie i momentu wyznaczonego z pomiaru.
4.Wnioski:
Celem ćwiczenia było doświadczalne wyznaczenie momentów bezwładności brył obrotowych oraz środków ciężkości brył nieregularnych.
W ćwiczeniu wyznaczone zostaną doświadczalne momenty bezwładności wybranych brył obrotowych.
W przeprowadzonym ćwiczeniu stwierdziliśmy , że momenty wyznaczone w sposób analityczną różnią się znacznie od wyników uzyskanych w pozostałych próbach. Różnice te wynikają z błędu odczytu wymiarów , obliczenia masy, a także z faktu że maszyna wykorzystywana do pomiaru posiada własny moment bezwładności który wywiera wpływ na otrzymywane wyniki.
Błędy wynikają:
pomiar czasu jest obarczony błędem (włączanie i wyłączanie stopera),
pomiaru wymiarów geometrycznych stanowiska dokonano z dokładnością do 1mm i jest on obarczony błędem,
wychylenia tarczy od położenia równowagi nie były jednakowe we wszystkich pomiarach,
przy liczeniu momentu analitycznego przyjęto zaokrąglenie liczb do 4 miejsc po przecinku,
przy liczeniu ciężarów brył przyjęto zaokrąglenie w górę ich mas,
moment hamujący, uwzględniany przy wyliczaniu momentu bezwładności, został wyznaczony doświadczalnie. Błędy przy jego wyznaczaniu wynikają z pomiaru czasu.
chwila zatrzymania układu mogła być wychwycona niedokładnie,
6
10