POLITECHNIKA WROCŁAWSKA
Instytut Energoelektryki Wydział Elektryczny
|
Skład grupy:
|
Rok studiów: 3 Grupa: Studia: dzienne Semestr: 6 Rok akademicki: |
||
Laboratorium Podstaw Automatyki
|
||||
Grupa laboratoryjna:
|
Nr ćwiczenia: 12 |
Temat: Symulacja układów sterowania z wykorzystaniem pakietu MATLAB |
OCENA: |
|
Data oddania sprawozdania
|
|
|
|
|
Cel ćwiczenia
Celem ćwiczenia jest zamodelowanie układu regulatora temperatury i jego analiza za pomocą programu Matlab .
Schemat zamodelowanego układu (z korektorem)
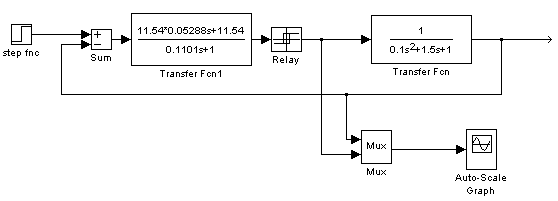
Transfer Fcn1- korektor ,który służy do poprawy parametrów regulatora temperatury.
Układ bez korektora jest taki sam jak powyżej za wyjątkiem bloku Transfer Fcn1
3.Dobór korektora
Parametry układu dobrano w oparciu o program wpisany do Matlaba .
Częstotliwość graniczna układu fgr=2,086Hz
Parametry korektora :
-A=11,54
-T=0,05288s
-T/alfa=0,1101s
4.Wnioski
Wykorzystując pakiet MATLAB z rozszerzeniem SIMULINK możemy modelować i badać liniowe oraz nieliniowe układy sterowania. Dzięki temu jesteśmy w stanie określić parametry układu np. zakres sterowania .
Zaprojektowano układ ,który w rzeczywistości mógłby służyć do regulacji temperatury.
Taki układ powinna cechować możliwość regulacji różnych temperatur (im większa rozpiętość tym układ jest lepszy),regulator powinien reagować na bardzo mały zakres zmian temperatury i powinien reagować bardzo szybko .Idealnie by było aby linia ciągła na obu wykresach (charakterystyka nagrzewania i stygnięcia urządzenia podczas działania
regulatora ) była linią prostą ,jednakże w rzeczywistości nigdy tak nie będzie. Dąży się więc do tego aby charakterystyka ta miała jak najmniejszą amplitudę i jak najmniejszy okres pracy regulatora. Wtedy nie mamy dużego wahania temperatury w pomieszczeniu (chodzi tu o to , że regulator np. ,,trzyma” temperaturę +28°C ± ,,0,005 °C ”i jest wtedy bardzo czuły). W związku z dużą czułość urządzenie regulacyjne często zmienia stan pracy (załącza i wyłącza ) co cechuje dobry regulator.
Na wykresie 1 przedstawiono pracę regulatora o gorszych parametrach( bez korektora ). Jak widzimy z wykresu amplituda charakterystyki nagrzewania wynosi 2,3 czyli jeżeli na regulatorze ustawimy temperaturę 28°C to w pomieszczeniu będziemy mieli wahania tej temperatury od 25,7°C do 30,3°C przez co regulator będzie działał co dłuższy okres czasu. Okres pracy (cykl załączenia i wyłączenia) w symulowanym układzie wynosi 2s. Następną cechą regulatora ,którą należało by rozważyć to zakres regulacji. Bez korektora regulujemy w zakresie sygnału wejściowego od 0 do 2,3 .
Wprowadzenie korektora powoduje to ,że wszystkie omawiane wcześniej cechy regulatora ulegają poprawie .Uzyskujemy w ten sposób regulator o lepszych właściwościach regulacyjnych.
Sytuację obserwujemy na wykresie 2 .I tak amplituda charakterystyki nagrzewania wynosi po ustaleniu pracy układu 0,5 czyli jest o 1,8 lepsza od regulatora bez korektora. Okres pracy wynosi 1s - też został polepszony .Zakres regulacji wynosi teraz od 0 do 2,9 -uległ również widocznej poprawie.
Wprowadzenie korektora do układu regulatora spowodowało widoczną poprawę parametrów regulatora .Uzyskujemy przez to regulator o większym zakresie regulacji oraz szybszych zmianach stanu pracy na zmiany temperatury otoczenia.
1
1
Wyszukiwarka