Temat: OBIEKT DYNAMICZNY LINIOWY
Badanie podstawowych członów dynamicznych
Proporcjonalny

,
, 
,
•(-1) →
przykładowe równanie ma postać: y = kp•u
Całkujący

,
,
,
przykładowe równania układu mają postać: 
Inercyjny

,
,
,
przykładowe równania układu mają postać 
Różniczkujący rzeczywisty

,
,
,
przykładowe równania układu mają postać: 
Proporcjonalno - całkujący

,
,
•(-1)→
,

•(-1)→
przykładowe równania układu mają postać: 
Dwuinercyjny



przykładowe równania układu mają postać: 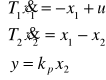
Oscylacyjne
przykładowe równania układu mają postać: 
,
,
,
,
,
,
,
Badanie prostego układu regulacji
Obliczenia transmitancji dwóch elementów (inercyjnego i całkującego) połączonych szeregowo (k1=k2=1; T=1):
![]()
Obliczenia transmitancji wypadkowej z uwzględnieniem sprzężenia zwrotnego:
Po uwzględnieniu definicji transmitancji ( G(s) = Y(s)/U(s) ), transmitancja wypadkowa wyraża się następująco:
![]()
na podstawie powyższego wyrażenia można utworzyć równania stanu i wyjść obiektu dynamicznego
Po przejściu do dziedziny czasu otrzymujemy:
![]()
otrzymane równanie jest równaniem różniczkowym 2-go rzędu, zatem można utworzyć 2 równania różniczkowe 1-go rzędu, które odpowiadać będą dwóm równaniom stanu. Jako zmienną stanu dobieramy sygnał wyjściowy y(t) wtedy zgodnie z zasadami doboru zmiennych fazowych można utworzyć relacje: 
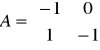
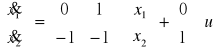
zatem równania obiektu dynamicznego są następujące: 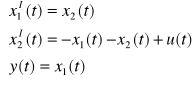
macierze odnoszące się do powyższego układu równań są następujące:
macierz stanu: macierz wejść: macierz wyjść: macierz transmisyjna




Można zauważyć, że macierz transmitancji jest zerowa, więc nie ma oddziaływania z wejścia na wyjście.
Sprawdzam czy powyższy układ jest sterowalny
warunkiem koniecznym i dostatecznym sterowalności jest aby macierz S=[B, AB, A2B,...,An-1B] była rzędu n (czyli żeby miała n liniowo niezależnych kolumn).
Układ, którego sterowalność będę sprawdzał jest układem z jednym wejściem u(t)=u(t), czyli równanie stanu ma postać

układ z jednym wejściem jest sterowalny jeśli:
det S=[b,Ab, A2b,...,An-1b]≠0


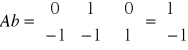
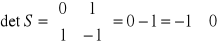
W macierzy S występują dwie niezależne liniowo kolumny, a wyznacznik jest różny od zera czyli układ jest sterowalny.
Sprawdzam czy powyższy układ jest obserwowalny.
warunkiem koniecznym i dostatecznym obserwowalności jest, aby macierz W=[CT, ATCT, (AT)2CT, ..., (AT)n-1CT] była rzędu n (czyli miała n-liniowo niezależnych kolumn.
Układ którego obserwowalność będziemy sprawdzać jest układem o jednym wyjściu y(t)=y(t), czyli równanie wyjścia ma postać: y(t)=cx(t), czyli warunkiem koniecznym i wystarczającym jest aby macierz W nie była osobliwa, czyli det.W≠0.
![]()




, 
czyli układ jest obserwowalny
Sprawdzam czy powyższy układ jest stabilny (kryterium Hurwiza).
Aby wszystkie pierwiastki równania charakterystycznego
![]()
U(s)=0
miały części rzeczywiste ujemne, muszą być spełnione następujące warunki:
wszystkie współczynniki równania istnieją i są większe od zera (jest to warunek konieczny, ale nie dostateczny).
Współczynniki równania istnieją i są większe od zera, czyli : a1=1>0; a2=1>0; a0=1>0. Warunek spełniony.
wszystkie podwyznaczniki wyznacznika głównego [R] istnieją i są większe od zera
W(s)= s2+s+1 → a2•s2 + a1•s + a0=0
a0 = 1, a1 = 1, a2 = 1
a>0

; n=2 ![]()
Układ jest stabilny wg kryterium Hurwitza, gdyż spełnione są powyższe warunki: równanie charakterystyczne ma wszystkie pierwiastki o ujemnej części rzeczywistej, gdyż spełnione są powyższe warunki. Tak więc koniecznym i dostatecznym warunkiem stabilności układu jest aby pierwiastki równania charakterystycznego układu zamkniętego miały ujemne części rzeczywiste.
Wnioski
Układ dynamiczny to dowolny układ fizyczny, rozpatrywany z punktu widzenia jego zachowania się w czasie. Otrzymane w trakcie ćwiczenia przebiegi z badanych układów dostarczają nam informacji o stanie układu. Znając transmitancję układu można wyznaczyć odpowiedź Y(t) układu przy dowolnym wymuszeniu U(t).
W pierwszej części ćwiczenia badano różne człony dynamiczne modelując odpowiednio macierze A, B, C i D na stanowisku badawczym. Wszystkie charakterystyki skokowe otrzymane podczas badań są zgodne z charakterystykami teoretycznymi.
Badanie każdego elementu dynamicznego przeprowadzono dla różnych wymuszeń. Dla członu oscylacyjnego dokonano kilku zmian parametrów macierzy A, przez co uzyskaliśmy kilka różnych charakterystyk skokowych o różnych tłumieniach.
Z analizy członów oscylacyjnych, wywnioskowano, że kolejne elementy macierzy A powodują (przy zwiększaniu ich wartości): wzrost amplitudy, częstotliwości odpowiedzi tłumienie wykresu odpowiedzi do zera oraz tłumienie oscylacji.
a11 - nie ma wpływu, wartość wynosi 0
a12 - ulega zmianie amplituda i częstotliwość oscylacji,
a21 - tłumi wykres odpowiedzi do zera, ulega zmianie współczynnik wzmocnienia, amplituda i częstotliwość. Zauważono, że zwiększając a21 amplituda, częstotliwość ulegają zmniejszeniu.
a22 - przy zwiększeniu wartości rośnie tłumienie, likwiduje oscylacje.
Kolejnym etapem było badanie prostego układu regulacji. Po sprawdzeniu warunków sterowalności, obserwowalności i stabilności okazało się, że układ jest sterowalny i obserwowalny oraz stabilny.
Wyszukiwarka