WYKŁAD 1 04.10.01.
1. Geodezyjna osnowa pozioma.
Państwowy układ wysokości i układ współrzędnych 1965 oraz informacja o układach stosowanych w przeszłości.
Dla wszelkich prac geodezyjnych przeprowadzanych w Polsce obowiązuje
jednolity dla całego kraju układ współrzędnych geograficznych (B,L)
państwowy układ współrzędnych prostokątnych płaskich (X,Y)
jednolity dla całego kraju państwowy układ wysokości (H)
ad a) powierzchnią odniesienia jest elipsoida obrotowa Krasowskiego z punktem przyłożenia elipsoidy do geoidy Pułkowo i orientacją określoną azymutem Ag (azymut geograficzny) "Bugry". Położenie punktów na tej powierzchni określają współrzędne geograficzne geodezyjne: B - szerokość, L - długość
Układ współrzędnych geograficznych geodezyjnych
Szerokością geograficzną geodezyjną B punktu P nazywamy kąt jaki tworzy normalna do elipsoidy przechodząca przez punkt P z płaszczyzną równika.
Długością geograficzną geodezyjną L punktu P nazywamy kąt dwuścienny zawarty między płaszczyzną południka zerowego o płaszczyzną południka przechodzącego przez punkt P.
ad b) Obowiązującym układem współrzędnych stosowanym przy wykonywaniu prac geodezyjnych na terenie kraju jest układ "1965". Jest to układ prostokątny płaski w odwzorowaniu konforemnym (zachowanie wierności kątów, lecz ze zmianą powierzchni i długości). Na terenie kraju utworzono 5 stref układu "1965", które mają własne początki układu współrzędnych, przy czym w każdym z układów dodatnia półoś X zwrócona jest na północ a dodatnia półoś Y na wschód.
rys. 1
Strefa I - płd. - wsch. część Polski
Strefa II - pn. - wsch. część Polski
Strefa III - pn. - zach. część Polski
Strefa IV - pd. - zach. część Polski
Strefa V - centralna część Polski
Linie stałych zniekształceń w strefach I-IV mają kształt okręgów współśrodkowych. Największe zniekształcenia występują w środkach stref i wynoszą 20cm/km.
Strefa V ma linie zniekształcające przebiegające południkowo (max. zniekształcenie 15cm/km).
W każdej strefie układu "1965" obliczone są współrzędne prostokątne płaskie. Linie siatki współrzędnych prostokątnych płaskich w odstępach ΔX=40 km, ΔY=64 km dzielą każdą strefę podziału na sekcje podziałowe. Sekcje znajdujące się w jednym poziomie tworzą pasy, sekcje znajdujące się w jednym pionie tworzą słupy. Pasy i słupy są oznaczone kolejnymi cyframi 0,1,...,9. Początek układu współrzędnych jako początek podziału strefy na pasy i słupy. Pasy numerowane są z północy na południe, słupy z zachodu na wschód.
3 4 3
strefa pas słup
ad c) obowiązującym układem wysokości stosowanym przy wykonywaniu prac geodezyjnych jest państwowy układ wysokości H. Wysokości H punktów osnowy wysokościowej wszystkich klas odniesione są do poziomu 0 mareografu w Kronsztadzie i wyznaczone w systemie wysokości normalnej (prostopadłej).
2. Instrukcje geodezyjne.
Przepisy techniczne dotyczące wykonywania prac geodezyjnych zawarte są w instrukcjach technicznych geodezyjnych i kartograficznych. Określają one treść, dokładność i formę wyżej wymienionych prac. Nazwy, określenia i oznaczenia podstawowych pojęć z zakresu geodezji i kartografii ustalają PN (polskie normy) i BN (branżowe normy). Instrukcje techniczne dzielą się na grupy:
O - instrukcje ogólne, regulują sprawy ogólne
G - instrukcje regulujące wykonywanie: - pomiarów osnów geodezyjnych, - pomiarów astronomicznych, grawimetrycznych i magnetycznych do celów geodezyjnych, - pomiarów sytuacyjnych i rzeźby terenu, - pomiarów realizacyjnych i obsługi inwestycji, - pomiarów i opracowań w zakresie ewidencji gruntów
K - instrukcje kartograficzne, regulują opracowanie i reprodukcję mapy zasadniczej, map topograficznych dla celów gospodarczych oraz map tematycznych
Instrukcje grup G i K składają się z części:
a) obligatoryjnej
b) szeregu wytycznych
ad a) Zawiera parametry dokładnościowe oraz określenie treści i formy końcowego produktu. Część ta zatytułowana jest "instrukcje techniczne"
ad b) Zawiera zalecane technologie, wzory, przykłady, parametry techniczne i dokładnościowe pewnych etapów pracy. Część ta zatytułowana jest "wytyczne techniczne"
Dla zapewnienia jednolitości i odpowiedniej jakości prac geodezyjnych wykonywanych dla poszczególnych resortów gospodarczych mogą być stosowane resortowe instrukcje techniczne pod warunkiem ich zgodności z instrukcjami GUGiK (Główny Urząd Geodezji i Kartografii).
3. Podział prac geodezyjnych.
Geodezja należy do nauk zajmujących się Ziemią. Zajmuje się ona pomiarem i podziałem posiadłości ziemskich, ale też badaniem kształtu i wielkości Ziemi. Geodezja jako jedna z dziedzin nauki i techniki zajmuje się zbieraniem informacji na wyżej wymienione tematy, jak i ich opracowaniem, czyli przekształceniem, a następnie ich udostępnieniem. Przekształcanie zbieranych informacji o Ziemi polega między innymi na opracowaniu różnego rodzaju map zawierających różnorodne zestawy informacji. Wynikiem przekształcenia informacji geodezyjnych może być zestaw danych numerycznych o terenie gromadzonych w bankach danych tematycznych. Zbieranie informacji polega na wykonywaniu pewnych pomiarowych prac geodezyjnych.
Prace geodezyjne dzielą się na:
a) pomiary osnów geodezyjnych, grawimetrycznych i magnetycznych
b) pomiary szczegółowe sytuacyjne i wysokościowe
c) pomiary realizacyjne i obsługa inwestycji
d) prace geodezyjne związane z ewidencją gruntów
e) prace wykonywane dla określonych celów gospodarczych
WYKŁAD 2 11.10.01.
Pozioma osnowa geodezyjna stanowi usystematyzowany zbiór punktów, których wzajemne położenie na powierzchni odniesienia zostało określone przy zastosowaniu techniki geodezyjnej. Dzieli się na:
a) osnowa podstawowa I klasa
b) osnowa szczegółowa II i III klasa
c) osnowa pomiarowa IV
a) Tworzą ją sieci geodezyjne rozwiązywane równocześnie na obszarze całego kraju, o najwyższej dokładności oraz określonym, równomiernym zagęszczeniu. Osnowa ta powinna służyć celom naukowym, obronności kraju, a także do nawiązywania osnów szczegółowych. Powinna ona tworzyć sieć kątowo liniową obliczoną na podstawie pomiarów geodezyjnych, astronomicznych i grawimetrycznych. Stopień zagęszczenia osnowy I klasy powinien wynosić co najmniej 1 punkt na 60km2. W skład osnowy I klasy wchodzą:
1) sieć astronomiczno - geodezyjna, która powinna charakteryzować się
przeciętną odległością między sąsiednimi punkami ok. 20km
odpowiednio rozmieszczonymi elementami liniowymi, punktami Laplace'a i punktami niwelacji astronomiczno - grawimetrycznymi
średnim błędem kąta po wyrównaniu max

średnim błędem względnym długości boku max

2) sieć wypełniająca, która powinna posiadać:
przeciętne odległości między sąsiednimi punktami ok.. 7km
średni błąd pomiaru kąta po wyrównaniu

średni błąd względny długości boku

Dopuszczalne średnie błędy pomiaru kątów wynoszą:
dla sieci astronomiczno - geodezyjnej

dla sieci wypełniającej

Dopuszczalny błąd względny długości boku wynosi:
dla sieci astronomiczno - geodezyjnej

dla sieci wypełniającej

b) Punkty osnowy szczegółowej zaliczamy do II i III klasy. Osnowę II klasy stanowi zbiór punktów będących rozwinięciem osnowy I klasy. Osnowę tę zakłada się w celu:
sporządzania map wielkoskalowych głównie metodami fotogrametrycznymi
wykonywania pomiarów realizacyjnych związanych z przeniesieniem na grunt wszelkiego rodzaju projektów inżynierskich
nawiązania osnowy III klasy i wyznaczenia punktów osnowy pomiarowej
Osnowa II klasy powinna być zakładana jako powierzchniowa sieć kątowo-liniowa. Można ją także zakładać jako triangulację lub poligono -triangulację. Stopień zagęszczenia osnowy II klasy (łącznie z punktami klasy I) powinien wynosić:
na terenach intensywnie zainwestowanych 1 punkt na

na terenach rolnych 1 punkt na

na terenach zwartych kompleksów leśnych 1 punkt na

Osnowę szczegółową II klasy należy rozwiązywać jako sytuacyjno-wysokościową, wyznaczając wysokości jej punktów metodą niwelacji trygonometrycznej ze średnim błędem ![]()
. Średni błąd wyznaczenia położenia punktów osnowy II klasy po wyrównaniu nie powinien przekraczać ![]()
.
Osnowę szczegółową III klasy stanowi zbiór punktów będący rozwinięciem osnowy klasy II. Osnowa ta służy do nawiązywania osnowy pomiarowej i wykonywania szczegółowych pomiarów geodezyjnych. Osnowa III klasy powinna być zakładana:
na terenach intensywnie zainwestowanych metodami bezpośrednich pomiarów geodezyjnych. Głównie metodą poligonizacji lub wcięć albo metodą fotogrametryczną, przy czym stopień zagęszczenia osnowy (łącznie punktów II i III klasy) powinien wynosić 1 punkt na

na terenach rolnych metodą fotogrametryczną, przy czym stopień zagęszczenia osnowy powinien wynosić 1 punkt na

Dokładność osnowy poziomej III klasy charakteryzuje się średnim błędem wyznaczenia położenia jej punktów, który po wyrównaniu nie powinien przekraczać ![]()
.
c) Osnowa pomiarowa stanowi rozwinięcie osnowy szczegółowej, przy czym dokładność, stopień zagęszczenia i sposób rozmieszczenia punktów powinny być dostosowane do konkretnych zadań geodezyjno-kartograficznych i przyjętej technologii ich realizacji. Realizowana ona będzie w postaci najprostszych konstrukcji głównie liniowych i kątowo-liniowych dostosowanych do warunków terenowych i stosowanej metody pomiaru szczegółów. Spełnia ona tylko zadanie doraźne i w związku z tym jej punkty nie są stabilizowane w sposób trwały ani przekazywane pod ochronę.
Niezależnie od wyżej wymienionego podziału osnowy poziomej na podstawową i szczegółową wyodrębnia się dla celów specjalnych sieć triangulacji państwowej, która obejmuje wszystkie punkty osnowy podstawowej oraz wybrane punkty osnowy szczegółowej. Sieć ta dzieli się na 4 klasy oznaczone cyframi arabskimi. Dokładność punktów sieci triangulacji państwowej poszczególnych klas charakteryzują następujące błędy średnie kąta po wyrównaniu:
Klasa 1: ![]()
Klasa 2: ![]()
Klasa 3: ![]()
Klasa 4: ![]()
Oprócz powyższych wymagań pod względem dokładności sieć triangulacyjna musi spełniać również wymagania konstrukcyjne:
Punkty 1 i 2 klasy powinny posiadać konstrukcję jak punkty osnowy I klasy. Konstrukcja sieci astronomiczno - geodezyjnej odpowiada konstrukcji triangulacji państwowej 1 klasy, a konstrukcja sieci wypełniającej odpowiada konstrukcji triangulacji państwowej 2 klasy.
Punkty 3 klasy powinny być wyznaczone co najmniej trzema obustronnymi celowymi w nawiązaniu do punktów 1 i 2 klasy z warunkiem aby średnia długość celowej nie była mniejsza od

a najkrótszej od
.Punkty 4 klasy powinny być wyznaczone w nawiązaniu do punktów wyższych klas. W triangulacji państwowej w konstrukcji geometrycznej określającej każdy punkt powinny występować co najmniej dwie pary niezależnych elementów wyznaczających. Średnia długość celowej nie powinna być mniejsza od

a najkrótszej od
.Przeciętny stopień zagęszczenia terenu punktami triangulacji państwowej nie powinien być mniejszy niż 1 punkt na

dla 1, 2 i 3 klasy łącznie, natomiast dla klas 1, 2, 3 i 4 łącznie 1 punkt na
.Dla triangulacji państwowej powinny być osiągnięte następujące dokładności pomiarów:
klasa punktu |
dopuszczalny błąd pomiaru |
|
|
kąta |
długości boku |
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
WYKŁAD 3 18.10.01.
Technologie i konstrukcje stosowane przy zakładaniu geodezyjnych osnów poziomych.
I Wiadomości ogólne.
Geodezyjne osnowy poziome mogą być rozwiązywane różnymi metodami w zależności od ich klasy:
osnowy podstawowe tylko na podstawie bezpośrednich pomiarów geodezyjnych, astronomicznych i grawimetrycznych jako sieci:
kątowe (triangulacja)
liniowe (trilateracja)
kątowo-liniowe (triangulateracja)
osnowy szczegółowe w zależności od klasy i gęstości punktów osnowy podstawowej na podstawie bezpośrednich pomiarów geodezyjnych w postaci sieci:
1) kątowo-liniowych (poligonotriangulacja, wzmocniona poligonizacja, klasyczna poligonizacja (liniowych, kątowych))
2) pośrednio metodami fotogrametrycznymi
c) osnowy pomiarowe
na podstawie bezpośrednich pomiarów geodezyjnych:
sieci poligonowych
sieci linii i punktów pomiarowych
zbioru punktów wyznaczanych wcięciami
kątowymi
liniowymi
sposobem biegunowym
pośrednio metodami fotogrametrycznymi
długości boków
długości ciągów
rozmiary figur geometrycznych tworzących sieć
inna dokładność pomiarów
inna stabilizacja punktów
inne metody analitycznego opracowania wyników
projekt wstępny, w którym przeprowadza się analizę istniejących materiałów geodezyjnych
projekt techniczny, obejmujący wywiad terenowy, mający na celu sprawdzenie projektu wstępnego oraz opracowanie projektu technicznego (wykonawczego)
realizację projektu technicznego w terenie, obejmującą:
stabilizację oraz sygnalizację punktów
pomiar elementów sieci
wstępną analizę dokładnościową
wyznaczenie i obliczenie sieci oraz ocenę jej dokładności
sieci kątowe (triangulacja)
pośredniczącą
warunkową
w przód
wstecz
kombinowane
pojedynczych, metodą wcięcia liniowego pojedynczego lub wieloktrotnego
gradowy
stopniowy
z podziałem na minuty i sekundy
ze zmiana minut i sekund na dziesiętne części stopnia
dalmierze elektrooptyczne (świetlne stosowane do pomiarów odległości od kilku metrów do kilkunastu kilometrów)
dalmierze mikrofalowe (radiowe stosowane do pomiaru odległości do kilkudziesięciu kilometrów)
metoda kierunkowa
metoda kątowa
metoda sektorowa.
warunki trójkątowe ( figur ), polegające na tym, że suma kątów w trójkącie powinna być równa 1800
warunki horyzontu polegają na tym, że suma wszystkich katów na stanowisku powinna być równa 3600
warunki boków (sinusowe) polegające na spełnieniu zależności między bokami i katami na podstawie twierdzenia sinusów.
założenie nowej lub uzupełnienie istniejącej osnowy
właściwe zdjęcie sytuacyjne szczegółów oparte na uprzednio założonej i pomierzonej osnowie.
drugie, niezależne położenie szczegółów,
miary czołowe (czołówki),
mary przeciwprostokątnych (podpórki)
miary do punktów przecięcia się linii pomiarowych z granicami działek i konturów lub ich przedłużeniami.
boki i punkty poligonowe,
boki i punkty ciągów sytuacyjnych,
bok i punkty ciągów wiszących,
linie pomiarowe.
zachowanie dobrej widoczności na sąsiedni punkt,
dogodność pomiarów w terenie linii łączącej następny punkt,
możliwie maksymalną nienaruszalność znaków.
domiarów prostokątnych (ortogonalna)
metoda biegunową
przedłużeń konturów sytuacyjnych
wcięć kątowych, liniowych i kątowo-liniowych.
Metoda ortogonalna.
Metoda biegunowa:
Metoda wcięć kątowych
Metoda wcięć liniowych
Rodzaje niwelacji powierzchniowej ( niwelacja tras ).
sposób niwelacji siatkowej polegający na wytyczeniu na terenie figur (zwykle kwadratów) i zaniwelowaniu ich wierzchołków
sposób punktów rozproszonych polegający na określeniu niwelatorem wysokości charakterystycznych punktów terenu i jednakowym wyznaczeniu ich położenia sytuacyjnego metoda biegunową; do tego sposobu niwelacji należy używać niwelatora z kołem poziomym
sposób profilów polegający na założeniu w terenie sieci poligonów, które niwelujemy sposobem niwelacji podłużnej, a teren do niej przylegający, niwelacją poprzeczną
sposób kombinowany polega najczęściej na połączeniu niwelacji siatkowej i punktów rozproszonych, stosuje się go, gdy dla pewnych prac inżynierskich wygodna jest niwelacja siatkowa, lecz samo zaniwelowanie wierzchołków kwadratów nie zobrazuje dokładnie rzeźby teren; punkty nie leżące na wierzchołkach wyznacza się wówczas metoda biegunową lub ortogonalną
NIWELACJA SIATKOWA
tyczenie siatki kwadratów
niwelacji siatki kwadratów
Zasady ogólne.
Określenie wysokości punktów nad poziomem odniesienia.
Określenie wysokości obiektów (budynków, wieży, kominów, masztów itp.).
mierzony obiekt jest dostępny, zaś pomiar długości „d” nie nastręcza trudności,
mierzony obiekt jest dostępny, lecz z powodu warunków terenowych nie da się pomierzyć odległości „d”,
mierzony obiekt jest niedostępny.
ilość rzędów ciągu nie może być większa od 2
przebieg ciągów powinien być dostosowany do rzeźby terenu i zapewniać ekonomiczne wykonanie pomiaru
długość ciągów nie może przekraczać 12 km
punkty węzłowe na obszarze podlegającym pomiarowi powinny być rozmieszczone równomiernie
tachimetr ze statywem
rejestrator zewnętrzny i kabel do transmisji wyników pomiarów (o ile tachimetr elektroniczny nie posiada własnej pamięci wewnętrznej)
komplet dwóch łat z libelami okrągłymi lub pryzmatów z tarczami celowniczymi
dwa szkicowniki (do szkicu i dziennika)
stanowisko tachimetryczne oznaczone kółkiem i numerem oraz kierunki orientacji
pikiety oznaczone kropką i numerem bieżącym
rysunek rzeźby terenu przedstawiony przy zastosowaniu przynajmniej 1 z 3 sposób, tj. usytuowanie linii szkieletowych (grzbietowych i ściekowych), przybliżonego zarysu warstwic, strzałek (kierunków spadu) łączących sąsiednie pikiety i wyznaczających kierunek interpolacji.
linia grzbietowa i kierunek jej spadu
linia ściekowa i kierunek jej spadu
spadek w kierunku pikiety 55
wzdłuż tej linii nie interpolować warstwic
elementy sytuacji związane z rzeźbą tj. urwiska, osuwiska, wąwozy, skarpy, budowle ziemne
strzałka kierunku północy
miary kontrolne obiektu zdjęcia sytuacyjnego
obliczenie osnowy poziomej i wysokościowej, do której nawiązano punkty stanowisk
określenie współrzędnych i wysokości stanowisk tachimetrycznych
obliczenie dzienników tachimetrycznych
przygotowanie arkusza pierworysu mapy polegającego na naniesieniu ramki sekcyjnej, siatki kwadratów oraz osnowy szczegółowej i pomiarowej
naniesienie na arkusz poszczególnych pikiet i opisanie ich wysokości
wykreślenie sytuacji terenowej
interpolacja warstwic
wykreślenie warstwic w tuszu
wykonanie opisów pozaramkowych
przed rozpoczęciem interpolacji, wykreślamy na mapie sytuację terenową i skarpy
podczas interpolacji i kreślenia warstwic powstający rysunek powinien być ustawicznie konfrontowany ze szkicem polowym
w pierwszej kolejności warstwice interpoluje się wzdłuż linii szkieletowych, wzdłuż cieków oraz naturalnych dróg gruntowych dostosowując wypukłość lub wklęsłość warstwic do rodzaju linii
w terenie płaskim warstwice nie powinny mieć ostrych załamań
obowiązuje zasada współkształtności warstwic
uzgodnienie stylu warstwic na przylegających sekcjach
1/3 cięcia warstwicowego dla terenów o nachyleniu do 2°
2/3 cięcia warstwicowego dla terenów o nachyleniu od 2 do 6°
całości cięcia warstwicowego dla terenów o nachyleniu powyżej 6°
Tachimetry zwykłe
Tachimetry diagramowe
Tachimetry optyczne z dalmierzami dwuobrazowymi.
nakładka sytuacji powierzchniowej
nakładka elementów ewidencji gruntów
nakładka osnowy geodezyjnej
nakładka fotomapy
urządzenia infrastruktury technicznej.
wykonywania pomiarów i obliczeń geodezyjno - kartograficznych,
wykorzystania jako materiał podkładowy w pracach geodezyjnych do opracowywania projektów osnów geodezyjnych,
sporządzania planów zagospodarowania przestrzennego i ich realizacji,
studiów nad terenem,
jako materiał podkładowy do opracowywania map tematycznych,
do rozwiązywania problemów naukowo-badawczych.
elementy osnowy matematycznej i geodezyjnej,
osiedla,
obiekty przemysłowe, rolnicze i socjalno-kulturalne,
koleje, drogi i urządzenia z nimi związane,
wody i urządzenia z nimi związane,
roślinność, uprawy i grunty,
granice,
rzeźbę terenu.
średnie błędy położenia punktów poziomej osnowy geodezyjnej naniesionych na mapę nie mogą przekraczać 0,1 mm
dokładność położenia szczegółów sytuacyjnych I grupy dokładnościowej w odniesieniu do najbliższych punktów osnowy nie powinna przekraczać 0,5 mm, a w terenach górzystych i o zwartym zalesieniu 0,75mm
dokładność położenia pozostałych punktów sytuacyjnych nie może przekraczać 1 mm.
mapy społeczno - gospodarcze zawierające informacje ilustrujące określone zagadnienia z zakresu zjawisk gospodarczych i struktury zagospodarowania terenu oraz zagadnienia i zjawiska społeczne,
mapy przyrodnicze - zawierają informacje ilustrujące zasoby naturalne, zjawiska fizjograficzne i wzajemne powiązania występujące między poszczególnymi elementami środowiska przyrodniczego.
mapy gospodarcze przedstawiają jakościowe i ilościowe zagospodarowanie terenu,
mapy społeczne ilustrują zjawiska i stosunki demograficzne.
mapy fizjologiczne - obrazują rzeźbę terenu, budowę geodezyjną, wody, gleby, klimat, szatę roślinną i inne procesy zachodzące w środowisku przyrodniczym,
mapy sozologiczne - obrazują jakościowo i ilościowo zróżnicowane zaburzenie, zniszczenie i skażenie środowiska, dynamikę ujemnych zmian oraz stan zasobów środowiska i ochronę jego naturalnych wartości.
łatwość aktualizacji wybranych elementów treści mapy oraz wprowadzanie nowych informacji bez niszczenia innych
możliwość zautomatyzowanego kreślenia map w różnych skalach , o różnej treści oraz dla różnych obszarów
możliwość wykorzystania zapisanych numerycznie informacji w procesach przetwarzania komputerowego , np. dla planowania przestrzennego , projektowania inżynieryjnego , ewidencji gruntów itp.
pomiary terenowe z rejestracją polową w nośnikach numerycznych
autogrametryczne opracowanie zdjęć lotniczych i satelitarnych wspomagane komputerami
digitalizację istniejących zdjęć
inne bazy danych .
ciągi sytuacyjne
wcięcia kątowe , liniowe lub kombinowane
linie pomiarowe
aerotriangulację - najczęściej sieci modularne
kombinacje wymienionych wyżej sposobów pomiarów
0,01 m - dla elementów naziemnych uzbrojenia terenu
0,05 m - dla budowli i urządzeń technicznych o konstrukcji trwałej
0,10 m - dla budowli i urządzeń technicznych ziemnych i podziemnych zakrytych
Przyjęty układ wysokości jest inny niż obowiązujący.
Na istniejącej mapie zastosowano odmienne cięcie warstwicowe niż to przewiduje instrukcja
odległość większa niż 300m
odległość mniejsza niż 300 m
Prace przy poszczególnych rodzajach osnów z zastosowaniem każdej z prostszych technologii mają w zasadzie przebieg identyczny. Różnice polegają na tym, że w miarę obniżania się klasy osnowy poszczególne etapy prac ulegają znacznemu uproszczeniu lub likwidacji. Dla każdego rodzaju i klasy osnowy inne są również wymiary geometryczne ich elementów składowych jak:
Niezależnie od przyjętej technologii proces zakładania osnów podstawowych i szczegółowych i to na podstawie bezpośrednich pomiarów geodezyjnych powinien zawierać etapy:
4) opracowanie wyników pomiarów, obejmujące:
5) kompletowanie operatu
II Charakterystyka technologii zakładania i konstrukcji osnów szczegółowych
W celu przeprowadzenia ogólnej charakterystyki technologii zakładania oraz konstrukcji geodezyjnych osnów szczegółowych przedstawione zostaną:
Pojęcie triangulacji obejmuje zarówno technologię zakładania geodezyjnych osnów poziomych jak i konstrukcji sieci. Zasadnicza idea triangulacji polega na określeniu wzajemnego położenia odległych od siebie punktów, będących wierzchołkami trójkątów na podstawie pomiarów kątowych oraz pomierzonego boku wyjściowego, tzw. bazy.
W celu określenia wzajemnego położenia 2 sąsiednich punktów, np. 5 i 6 czyli długości ![]()
należy oprócz bazy ![]()
pomierzyć co najmniej 2 kąty w każdym trójkącie (praktycznie mierzy się wszystkie 3 kąty w trójkącie). Długość ![]()
obliczymy według wzoru sinusowego wychodząc ze znanego boku ![]()
na podstawie pomierzonych kątów trójkątów:

![]()
W praktyce zdarza się często, że interesuje nas odległość między punktami, które nie są wierzchołkami tego samego trójkąta, na przykład odległość 1-6. Wówczas należy założoną sieć obliczyć w przyjętym układzie współrzędnych, czyli na podstawie pomierzonej długości boku wyjściowego (bazy) i pomierzonych kątów w trójkącie obliczyć współrzędne X, Y wszystkich jej punktów w tym układzie. Ta technologia określenia położenia punktów sieci, będących wierzchołkami tworzących ją trójkątów nazywa się triangulacją. Mierzoną sieć można obliczyć w przyjętym układzie współrzędnych, jeżeli dowiążemy tą sieć do punktów osnowy wyższej klasy, których współrzędne w tym układzie są znane. Na podstawie pomierzonych kątów w trójkątach i znanego boku wyjściowego możemy obliczyć długości wszystkich boków sieci oraz ich azymuty, a następnie obliczyć współrzędne punktów zakładanych sieci. W praktyce obliczenia sieci triangulacyjnych przeprowadza się równocześnie z wyrównaniem wykonanych w niej obserwacji metodami ścisłymi:
Rozróżnia się triangulację powierzchniową (sieć powierzchniowa) oraz wydłużoną (łańcuchy) jak również stosowaną w celu wyznaczenia pojedynczych punktów lub ich niewielkich grup, czyli tzw. wcięcia kątowe. Wcięcia można podzielić na:
Do podstawowych elementów konstrukcyjnych sieci triangulacyjnych należą:
a) pojedynczy trójkąt, w którym mierzymy wszystkie kąty
b) czworobok geodezyjny, mierzymy kąty jak na rysunku
c) układ centralny, mierzymy wszystkie kąty
WYKŁAD 4
1) Sieci triangulacyjne dla dużych obszarów zakłada się w postaci odpowiednio rozległej sieci powierzchniowej. Składa się ona z przylegających, w przybliżeniu równobocznych, trójkątów tworzących pokrywające się kolejno układy centralne.
Sieci triangulacyjne dla wąskich, rozciągniętych w pewnym kierunku obszarów zakłada się w postaci łańcucha trójkątów lub łańcucha czworoboków geodezyjnych, lub w postaci łańcucha układów centralnych.
lub w postaci łańcucha układów centralnych.
Łańcuchy te prowadzone wzdłuż granic i w określonych odległościach wewnątrz poszczególnych państw stanowiły osnowy najwyższej dokładności, do których nawiązywano sieci triangulacyjne klas wyższych. Tak zbudowana jest polska sieć astronomiczno - geodezyjna złożona w przeważającej części z łańcuchów układów centralnych o przebiegu południkowo - równoleżnikowym, przecinających się w określonych miejscach, w których wykonywane są dodatkowo obserwacje astronomiczno - geodezyjne i grawimetryczne.
Technologię triangulacji stosowano powszechnie na całym świecie do zakładania poziomych osnów geodezyjnych o najwyższej dokładności. Obecnie większość państw modernizuje założone osnowy w celu eliminacji wad sieci triangulacyjnych oraz podniesienia ich wartości technicznej. Cel ten osiągany jest przez uzupełnianie sieci kątowych pomiarami liniowymi w wyniku czego powstają sieci kątowo liniowe.
b) Jeśli w konstrukcji triangulacyjnej zamiast kątów w trójkątach pomierzone zostaną długości ich boków to sieci te oraz technologię ich zakładania nazywa się trilateracją. Sieci trilateracyjne zaczęto realizować po wyprodukowaniu i wprowadzeniu do pomiarów geodezyjnych dokładnych dalmierzy elektromagnetycznych, Dzisiaj trilateracja jest stosowana przy zakładaniu lub modernizacji geodezyjnych osnów pomiarowych w wielu krajach. Trilateracja, podobnie jak triangulacja, może być stosowana do wyznaczania punktów:
wcięcie pojedyncze wcięcie liniowe z wyrównaniem
lub ich niewielkich grup
2) Sieci o charakterze powierzchniowym:
- o małym zasięgu w postaci czworoboku geodezyjnego lub układu centralnego
- rozciągniętych na duże obszary
3) Sieci o charakterze liniowym, w postaci łańcuchów trójkątów lub czworoboków geodezyjnych lub układów centralnych
Położenie poszczególnych punktów w sieci trilateracyjnej określa się na odstawie wykonanych w tych sieciach pomiarów liniowych. Wyrównuje się je metodą pośredniczącą.
c) Sieci kątowo - liniowe
Jeżeli w omawianych dotychczas konstrukcjach pomierzone zostaną zarówno kąty jak i długości wszystkich gr. W pewnej ilości boków to sieć tą nazywamy siecią kątowo - liniową.
Liczba mierzonych elementów kątowych i liniowych w sieciach kątowo - liniowych oraz sposób ich rozmieszczenia w sieci mogą być różne: sieć, w której pomierzono wszystkie kąty i wszystkie długości boków nazywa się siecią triangulateracyjną.
Do sieci kątowo - liniowych należą sieci triangulacyjne, w których nie dokonano pomiarów pewnych kątów, ale za to pomierzono długości pewnej liczby boków
- sieci poligonowo - triangulacyjne składające się z ciągów poligonowych dwustronnie nawiązanych, usztywnionych przez pomiar elementów liniowych i kątowych do punktów wyższej klasy:
- klasyczne sieci poligonowe
- wzmocnione sieci poligonowe
Poligonizacja:
Według Polskich Norm poligonizacja to: "dział geodezji zajmujący się wyznaczaniem wzajemnego położenia punktów osnowy geodezyjnej jako wierzchołków wieloboków, w których pomierzono wszystkie kąty i boki". Najistotniejszą cechą tej konstrukcji jest lokalizacja jej punktów w wierzchołkach linii łamanych tworzących wieloboki otwarte lub zamknięte, zwane ciągami poligonowymi zamkniętymi lub otwartymi. Punkty w wierzchołkach ciągów poligonowych nazywają się punktami poligonowymi. Spośród poligonów otwartych powszechnie stosowany jest poligon obustronnie nawiązany kątowo i liniowo.
Układ co najmniej trzech ciągów tej samej klasy lub rzędu schodzących się w jednym punkcie poligonowym nazywa się siecią poligonową, a punkt połączenia tych ciągów punktem węzłowym.
Obliczenia sieci poligonowych można dokonać:
- metodą przybliżoną w dwóch etapach: w pierwszym oblicza się i wyrównuje elementy na punktach węzłowych tj.: azymut węzłowy i współrzędne punktu węzłowego, w drugim azymuty i współrzędne wszystkich pozostałych boków poligonowych na poszczególnych bokach poligonowych
- metodami ścisłymi (pośredniczącą i zawarunkowaną)
Instrumenty i przyrządy stosowane do pomiarów kątowych.
Do pomiarów kątowych:
W poziomych osnowach podstawowych, szczegółowych oraz pomiarowych wykonuje się pomiary kątowe i długościowe.
- w sieciach I i II klasy do pomiarów kątowych należy stosować teodolity z dwumiejscowym systemem odczytowym o nominalnej wartości odchyłki 1s lub 2cc. Np.: Wild T2, Kern DKM 2, DKM 2A, Zeiss Theo 010, Theo 010A, Theo 010B, Th 2, oraz teodolity elektroniczne jak: Theomat T2000, T2002, T3000.
- do pomiarów kątowych w sieciach szczegółowych III klasy można stosować teodolity z jednomiejscowym systemem odczytowym o nominalnej dokładności 6-10s: Wild T1, Kern DKM1, Zeiss Thoe 020, 020A, 015B, Th 4, Th 6, lub inne o podobnych parametrach dokładności.
- do pomiarów osnów pomiarowych dopuszcza się instrumenty o niższej dokładności
Opisy teodolitów tradycyjnych podane są między innymi w: J. Szymański - Istrumentoznawstwo, Kamela, Lipiński - Geodezja.
W teodolitach jako systemy odczytowe występują mikroskopy skalowe oraz mikrometry optyczne.
WYKŁAD 5
Obecnie produkowane są teodolity o konstrukcji opartej na rozwiązaniach elektronicznych. W teodolitach tych mikroprocesor steruje procesem pomiarowym oraz kontroluje. Wynik pomiaru teodolitem elektronicznym jest wyświetlany na wskaźniku (ekranie systemu odczytowego) w formie cyfrowej i może być automatycznie przeniesiony i zapisany na odpowiednim nośniku informacji, z którego maszyna cyfrowa może bezpośrednio pobierać dane.
Zestaw teodolit elektroniczny i dalmierz połączone z elektroniczną maszyną cyfrową tworzą system informatyczny do zbierania i przetwarzania i udostępniania informacji o terenie. Z pośród nowoczesnych teodolitów elektronicznych produkowanych przez różne firmy najbardziej rozpowszechnione w Polsce są teodolity: Wild - Leitz Theomat T2000, Theomat T2002, Theomat T3000. Konstrukcje tych teodolitów wykorzystują najnowocześniejsze odkrycia z dziedziny elektroniki i informatyki. System pomiarowy jest sterowany i kontrolowany przez mikroprocesor, dzięki czemu teodolit jest w dużym stopniu zautomatyzowany. Metoda pomiaru kierunku oparta jest na zasadzie dynamicznego systemu odczytowego z pełnym wykorzystaniem elektroniki. Luneta teodolitu T2002 produkowana w różnych wersjach w celu dostosowania jej parametrów do dokładności pomiaru kątów, posiada obraz prosty o dużej jasności . Na tę lunetę można nakładać elektrooptyczne nakładki dalmiercze typu DISTOMAT. W teodolicie tym zastosowano metodę dynamicznego pomiaru kierunku. W metodzie tej w momencie pomiaru kierunku limbus wprowadzany jest w ruch obrotowy za pomocą silniczka. Aby zmierzyć wartość kierunku obserwator naciskając odpowiedni klawisz na tablicy włącza napięcie do urządzenia mechanicznego i elektronicznego teodolitu, a następnie wprowadza krzyż nitek lunety na cel. Przez naciśnięcie odpowiedniego klawisza obserwator uruchamia mikroprocesor sterujący obieranie kierunku na limbusie za pomocą elektronicznych urządzeń pomiarowych. W wyniku działania tego całkowicie automatycznego urządzenia wartość kierunku zostaje n-razy zmierzona, skontrolowana, a po uśrednieniu wyników wyświetlona na ekranie systemu odczytowego. Za pomocą teodolitu T 2002 można mierzyć kierunki (kąty) w sposób tradycyjny lub stosując metodę pomiaru ciągłego. W systemie odczytowym teodolitu istnieje możliwość wyboru systemów podziału koła:
c) tysięczny.
Tradycyjny sposób zapewnienia maksymalnej dokładności pomiaru kierunków (kąta).
Teodolit ustawia się nad punktem za pomocą pionu optycznego i po wycelowaniu naciska się odpowiedni klawisz otrzymując wartość kręgu poziomego i pionowego, które zostają wyświetlone w okienku odczytów. Wartości te mogą być odczytywane przez obserwatora i zapisywane w dzienniku pomiarowym lub automatycznie skierowane do rejestratora danych GRE 4, jeżeli przyrząd ten jest sprzężony z teodolitem.
Metoda pomiaru ciągłego polega na prowadzenia pomiarów w sposób ciągły przy obracającej się alidadzie. Odczyt kierunku jest powtarzany okresowo i wyświetlany co 3 sekundy.
Pełne wykorzystanie możliwości technicznych teodolitu T 2002 osiąga się po połączeniu go z rejestratorem danych GRE 4 oraz, jeśli rozwiązywane zadania tego wymagają, z jedną z nasadek dalmierczych Wilda.
Instrumenty stosowane do pomiarów długościowych.
Pomiary długości boków w osnowach I, II i III klasy, a więc podstawowych i szczegółowych, są obecnie najczęściej wykonywane przy użyciu dalmierzy elektromagnetycznych. Pomiary długości w osnowach pomiarowych wykonuje się bezpośrednio przymiarami lub dalmierzami optycznymi.
Dalmierze elektromagnetyczne:
Do pierwszej grupy należą m.in. :
EOK 2000, EOT 2000 - Zeiss Jena
DISTOMAT DI 10, DI 3, DI 3S - Wild
DM 500, DM 501, DM 1000, DM 2000 - Kern
REG ELTA 14 - Opton
Wśród dalmierzy elektrooptycznych wyróżnia się grupę dalmierzy optoelektronicznych. Są to przeważnie dalmierze nasadkowe nadające się do współpracy z teodolitem. Spotykane są następujące połączenia teodolitu z dalmierzem:
1 - dalmierz wymienny z teodolitem w spodarce teodolitu
2 - dalmierz nasadkowy na lunetę teodolitu lub jego uchwyt
3 - dalmierz obudowany wokół lub obok lunety teodolitu
4 - dalmierz montowany pod teodolitem
5 - dalmierz scalony z teodolitem (tachimetr)
Dalmierz optoelektroniczny cechuje zasięg od 1.5 do 5 km.
Błąd pomiaru
Ciężar: 0,6 - 8 kg, moc zasilania kilka do kilkunastu Watów
DI 1000, DI 5 S, DI 2000, DI 3000, DIOR 3002 - Wild
Do dalmierzy drugiej grupy (radiowe) należą:
ELECTROTAPE DM 20 USA
DISTAMETER Niemcy
SIAL MD 60 Szwajcaria
TELLUROMETER Anglia
DISTOMAT Szwajcaria
Zasięg pomiaru oraz średni błąd pomiaru tych dalmierzy poniżej:
2,5 km - zasięg; +/-10 mm - błąd
Pomiar elementów kątowych i długościowych osnów.
Pomiary kątowe:
Pomiary elementów kątowych w sieciach podstawowych i szczegółowych II klasy wykonuje się zwykle metodą kierunkową w kilku seriach. W przypadku wystąpienia na stanowisku więcej niż dwóch kierunków korzystniej jest przeprowadzić pomiar metodą sektorową.
W sieciach osnowy szczegółowej III klasy na punktach węzłowych prowadzi się pomiar metodą kierunkową, a na pozostałych punktach metodą zwykłą.
Do pomiaru kątów w osnowie szczegółowej II klasy używa się teodolitu o nominalnej dokładności odczytu 1” lub 2cc. Punkty celu sygnalizuje się tarczami celowniczymi. centrowanie teodolitu i tarcz wykonuje się za pomocą pionów optycznych. Kąty w tej klasie mierzy się w trzech seriach z błędem średnim +/- 4” lub +/- 12 cc . Do pomiaru kątów w osnowie III klasy można używać teodolitu +/- 6” - 10” lub +/- 20cc. Punkty celu sygnalizuje się tarczami celowniczymi centrowanymi za pomocą pionów optycznych lub drążkowych, dopuszcza się też sygnalizację celu pionowo ustawionymi tyczkami geodezyjnymi. Kąty w sieciach III klasy mierzy się w dwóch seriach z błędem średnim nie większym niż:
- w ciągach o długości do 2 km 15” lub 45cc
- w ciągach o długości 2-3 km 10” lub 30cc
- w ciągach o długości 3-4,5 km 6” lub 20cc
Niezależnie od przyjętej metody pomiaru do pomiarów kątowych należy używać przyrządów sprawdzonych i zrektyfikowanych.
Do pomiarów kątowych stosuje się metody:
WYKŁAD 6
Metoda kierunkowa- pomiar tą metoda polega na wyznaczeniu wielkości kątów poziomych między kierunkiem zerowym limbusa, a kierunkami do kolejnych punktów celu.
Wybiera się punkt najlepiej widoczny przyjmując kierunek do niego jako początkowy. Powinien to być punkt położony na północnej części horyzontu ostro rysujący się na tle. Pierwszą serię obserwacji rozpoczyna się od wycelowania na punkt początkowy i po wycelowaniu na sygnał ustawia się mikrometr na odczyt 0' 00'' a następnie obraca się limbus za pomocą śruby rejteracyjnej tak, aby odczyt wynosił 0° 00'. Następnie celuje się ponownie na punkt początkowy, doprowadza się obrazy przeciwległych części koła do koincydencji, odczytuje podziałki koła i mikrometru. Obserwując kolejno sygnały z kierunkiem zgodnym z ruchem wskazówek zegara celuje się ponownie na punkt początkowy, który obserwuje się powtórnie (jest to półseria - półpoczet). Następnie po przerzuceniu lunety przez zenit i obrocie alidady o 180° wykonuje się pomiar w kierunku przeciwnym do ruchu wskazówek zegara. W drugiej półserii, podobnie jak w pierwszej rozpoczyna się i kończy obserwacje od kierunku do punktu wyjściowego. Obie półserie tworzą pełną serię (poczet) pomiaru kierunku. Kontrolą pomiarów jest wartość odczytu zamknięcia półserii a następnie pełnej serii. Odchyłka zamknięcia jest to różnica między odczytami kierunku początkowego i zamykającego. Nie powinna przekraczać dwukrotnej wartości błędu średniego różnicy tych kierunków, czyli dla półserii ,dla serii
mk - błąd pomiaru kierunku w jednej serii.
Gdy różnica jest większa pomiar powtarzamy.
Przed rozpoczęciem każdej następnej serii należy ponownie spoziomować teodolit. Przystępując do wykonania drugiej serii celuje się znów na punkt początkowy. Po czym ustawia się mikrometr na odczyt 1/S jego zakresu S - liczba serii. Następnie przesuwa się mikrometr na odczyt równy 180°/S i po wykonaniu czynności jak w pierwszej serii rozpoczyna się pomiar od ponownego wycelowania na punkt początkowy. Następnie wszystko tak samo. Następne serie obserwuje się w identyczny sposób zmieniając przed rozpoczęciem każdej nowej serii orientację limbusa i położenie mikrometru oraz powtórnie poziomuje się teodolit. Przykładowo dla s=4 początkowe odczyty wyniosą dla serii: I - 0°, II - 45°, III - 90°, IV - 135°. Dla drugiego położenia lunety odczyty wyniosą odpowiednio: 180°, 225°, 270°, 315°.
Dla mikronetru o zakresie 10' i podziale co 1'' dla S=4 początkowymi odczytami będą, I - 0'00'', II - 2'30'',
III - 5'00'', IV - 7'30''.
Metodę kierunkową stosujemy gdy na danym stanowisku jest maksymalnie 8 punktów celu, gdy więcej stosujemy metodę sektorową.
Metoda kątowa.
Polega na oddzielnym pomiarze każdego z kątów na stanowisku w odpowiedniej ilości serii na różnych miejscach limbusa i mikrometru. Poszczególne kąty mierzy się metodą zwykłą w dwóch położeniach lunety. Między seriami należy przesuwać limbus o 180°/S i mikrometr o 1/S S - ilość serii.
Przed opuszczeniem stanowiska należy obliczyć wartość średnią każdego kąta mierzonego w S seriach i zsumować je. Różnica między tą sumą a kątem pełnym daje odchyłką nie zamknięcia horyzontu. Odchyłka ta powinna mieć wartość
![]()
,
![]()
- średni błąd mierzonego kąta w S seriach
![]()
- ilość kątów wypełniających horyzont
Metoda sektorowa
III sektor
II sektor
Metoda sektorowa stosowana jest wówczas gdy na stanowisku liczba kierunków do pomiaru jest większa niż 8, a warunki obserwacji poszczególnych punktów są zróżnicowane. Wtedy spośród punktów przeznaczonych do pomiaru wybiera się trzy do czterech punktów , które są w przybliżeniu rozłożone równomiernie na horyzoncie. Kąty miedzy tymi punktami, zwanymi kątami sektorowymi mierzy się metodą kątową (wypełnienia horyzontu). Kąty wewnętrzne w każdym sektorze mierzy się metodą zwykłą w ramach sektorów . Kolejność pomiaru sektorów oraz kątów w sektorach jest dowolna i zależy od chwilowych warunków pomiarów . Najpierw wyrównuje się kąty sektorowe do horyzontu , a następnie kąty wewnętrzne do wartości sektorów .
POMIARY DŁUGOŚCIOWE:
Sposoby pomiaru długości boków osnów zmieniły się od czasu wprowadzenia do tych pomiarów dalmierzy elektromagnetycznych . Zamiast bardzo pracochłonnego pomiaru długości bazy i obliczania długości boku sieci ( boków ) z rozwinięcia bazowego mierzy się obecnie bezpośrednio długości boków za pomocą dalmierzy elektrooptycznych lub radiowych . Do pomiaru długości boków sieci podstawowej stosuje się dalmierze dalekiego zasięgu . Najdłuższe odległości , nawet do 150 km , można mierzyć dalmierzami radiowymi . Stosowany jest przyrząd o nazwie SIAL MD-60 ( Siemens - Albis ) Zurich . Wykonanie pomiarów tym przyrządem jest w dużym stopniu zautomatyzowane . Przy ustawieniu dwóch identycznych przyrządów na końcach mierzonej długości , wykonuje się pomiar odległości w obu kierunkach zmieniając funkcję przyrządu , który pracuje kolejno raz jako nadajnik lub odbiornik . Warunki meteorologiczne ( temperatura , ciśnienie , wilgotność ) rejestrowane są na obu końcach mierzonego boku i nastawione odpowiednim pokrętłem przyrządu są automatycznie uwzględniane w odczytanym wyniku zmierzonej długości .
Odległości w granicach 20 m - 150 km mierzone są z dokładnością s - długość mierzonego boku . Spośród obecnie produkowanych dalmierzy elektrooptycznych , największy zasięg mają dalmierze , których falą nośną jest promieniowanie laserowe . Pomiar długości za pomocą dalmierza elektrooptycznego lub radiowego należy wykonywać według instrukcji dołączonej do przyrządu .
Jeżeli pomiar odległości był wykonany mimośrodowo , przy nie centrycznym ustawieniu dalmierza i lustra należy wprowadzić poprawkę ze względu na mimośrodowy pomiar odległości .
A i B są punktami sieci kątowo - długościowej , dalmierz ustawiono w punkcie I zamiast w A . Lustro ustawiono w punkcie L zamiast w B . Wobec tego zamiast długości `S' pomierzono `Sm' . Elementy mimośrodu wynoszą e1 ,Q1 dla mimośrodu stanowiska oraz e2 ,Q2 dla mimośrodu celu .
Właściwą długość boku i pomierzonych elementów mimośrodu oblicza się ze wzoru :
WYKŁAD 7 22.11.2001
Poprawki do mierzonej długości boku
brak rysunku
Sens geometryczny poprawek, jakie powinny być wprowadzone do mierzonej długości boku
po wprowadzeniu poprawki na mimośród otrzymuje się AB po łuku krzywej zwaną krzywą refrakcji. Należy tę długość zredukować do długości cięciwy AB przez wprowadzenie poprawki ze względu na refrakcję. Redukcję tę wprowadza się dla długości większej od 10 km. Do obliczenia tej poprawki trzeba znać wartość współczynnika refrakcji, co umożliwia obliczenie średniego promienia krzywizny łuku AB. Następnie redukuje się odległość pochyłą AB do odległości poziomej A'B', czyli wprowadza się poprawkę ze względu na pochylenie mierzonego boku. Poprawkę wprowadza się na podstawie znanej różnicy odległości: h = H2 - H1. korzysta się ze wzoru:
gdzie h - różnica wysokości; l0 - średnia długość przymiaru.
Odległość zredukowana do poziomu A'B' znajduje się na wysokości średniej punktów A i B. Następnie należy długość A'B' zredukować do długości A0B0 na powierzchni odniesienia. Na podstawie cięciwy A0B0 należy obliczyć długość łuku A0B0 na powierzchni odniesienia.
Ostatnią poprawką jest poprawka odwzorowawcza, która pozwoli na obliczenie długości boku na przyjętej płaszczyźnie odwzorowawczej mając długość określoną na powierzchni odniesienia.
Obliczanie współrzędnych punktów i ocena dokładności sieci.
Obliczenia i wyrównania współrzędnych punktów omawianych sieci oraz ocenę ich dokładności dokonuje się metodami ścisłymi: pośredniczącą lub zawarunkowaną. Stosując metodę pośredniczącą obliczanie współrzędnych rozpoczyna się od pierwszego z punktów nawiązania. Azymut pierwszego z boków nowej sieci oblicza się na podstawie kąta nawiązania znanej już sieci. Mając azymut pierwszego boku nowo zakładanej sieci, pomierzone długości oraz kąty oblicza się współrzędne przybliżone wszystkich punktów. Boki, których długości nie zostały pomierzone należy przed obliczeniem współrzędnych wyliczyć (np. z tw. Sinusowego). Następnym etapem obliczeń jest ułożenie równań obserwacyjnych dla wszystkich obserwacji w sieci (obserwacje długości i kątów).
Dla obserwacji długościowych
![]()
gdzie
![]()
ΔXik = Xk0 - Xi0 ΔYik = Yk0 - Yi0![]()
Vdik - poprawka pomierzonej długości dik pomiędzy punktami „i” i „k”,
dXi, dYi, dXk, dYk - poprawki do przybliżonych wartości Xi0, Yi0, Xk0, Yk0 współrzędnych punktów „i” i „k”.
Lub w formie tabelarycznej:
Dla obserwacji kątowych
Równania obserwacyjne przybierają postać:
![]()
gdzie ![]()
VαLCP - poprawka kąta αLCP pomierzonego na punkcie C.
Lub w formie tabelarycznej:

gdzie:
![]()
; ![]()
; ![]()
; ![]()
.
Dalszy tok postępowania:
Niezależną sieć kątową, długościową lub kątowo-długościową można obliczyć omówiona wyżej metodą pośredniczącą lub zawarunkowaną. Przeprowadzając wyrównanie obserwacji metodą zawarunkowaną współrzędne dowolnego punktu sieci oraz orientację boku przyjmuje się w drugim etapie obliczeń podczas rachunku ostatecznych współrzędnych. Zgodnie z teorią najmniejszych kwadratów, suma kwadratów poprawek do pomierzonych wielkości ma być najmniejsza, czyli [vv]=min, [pvv]=min, a jednocześnie mają być spełnione warunki geometryczne sieci.
W sieciach występują trzy zasadnicze grupy warunków:
Przed przystąpieniem do wyrównania należy obliczyć ogólna ilość warunków w sieci, pamiętając o tym, że ilość ta jest równa ilości spostrzeżeń nadliczbowych. Następnie oblicza się ilość warunków w grupach. Ilość ta zależy od kształtu sieci i ilości pomierzonych boków oraz kątów. Wzór określający ogólną ilość warunków w sieci ma postać:
W = K - 2p + 4
Wzory na ilość warunków w poszczególnych grupach:
1. ilość warunków trójkąta WT = l - p +1
2. ilość warunków horyzontalnych WH = K - 2l + p
3. ilość warunków sinusowych WS = l - 2p + 3
gdzie: l - ilość celowych obustronnych
p - ilość punktów
k - ilość pomierzonych kątów
Suma ilości warunków w poszczególnych grupach musi być równa ogólnej ilości warunków w sieci.
Ilość warunków oraz ich kształt dla układu centralnego:
ilość wszystkich warunków:
W = 18 - 14 + 4 = 8
WT = 12 - 7 + 1 = 6
WH = 18 - 24 + 7 = 1
WS = 12 - 14 + 3 = 1
α1 + v1 + α2 + v2 + α13 + v13 = 0
α3 + v3 + α4 + v4 + α14 + v14 = 0
α11 + v11 + α12 + v12 + α18 + v18 = 0
WYKŁAD 8 29.11.2001
Warunek horyzontu:
α13 + v13 + α14 + v14 + ... + α18 + v18 = 0
Warunek sinusów:
![]()
![]()
Warunek ten należy sprowadzić do formy liniowej, przy pomocy logarytmu lub cotangensów. Sposób logarytmiczny opiera się na zasadzie ![]()
; ![]()
oznacza poprawkę logarytmiczną na jedną sekundę przyjętą z tablic logarytmicznych dla danego kąta.
Warunek sinusowy w formie liniowej ma postać:

POMIARY SYTUACYJNE
Cel i zasada pomiaru sytuacyjnego:
Pomiary sytuacyjne mają na celu określenie kształtu, wielkości i wzajemnego położenia szczegółów terenowych oraz przedstawienie ich na mapie w odpowiedniej skali. Wykorzystuje się je do sporządzenia map zasadniczych w skalach: 1:500, 1:1000, 1:2000, 1:5000. Pomiary sytuacyjne wykonuje się w oparciu o osnowę geodezyjną, mającą odpowiednią konstrukcje geometryczną zależną od wielkości obszaru i wymaganej dokładności (instrukcja G-1).
Przebieg pomiarów sytuacyjnych zwanych też często zdjęciem sytuacyjnym jest następujący:
Ogólne zasady techniczne obowiązujące przy wykonywaniu bezpośrednio pomiarów sytuacyjnych służących do sporządzenia i aktualizacji mapy zasadniczej oraz map tematycznych podaje instrukcja G-4.
GRUPY SZCZEGÓŁÓW:
Przedmiotem pomiaru sytuacyjnego są szczegóły terenowe stanowiące elementy treści mapy zasadniczej. Są to:
-naziemne szczegóły terenowe
-urządzenia podziemne oraz podstawowe elementy ewidencji gruntu.
Ze względu na charakter oraz wymagania dokładnościowe pomiaru szczegóły sytuacyjne dzielą się na trzy grupy dokładnosciowe (I,II,III instr.G4).
I grupa dokładniściowa: trwałe szczegóły o wyraźnych i jednoznacznie określonych granicach lub konturach,
II gr. dokł.: szczegóły terenowe o mniej wyraźnych i mniej trwałych konturach,
III gr. dokł.: pozostałe szczegóły terenowe.
Określenie położenia tych szczegółów terenowych względem najbliższych elementów poziomej osnowy geodezyjnej powinno być wykonane przy pomiarze bezpośrednim z następującymi dokładnościami:
I gr. szcz. ter. - 0,10 m
II gr. szcz. ter. - 0,30 m
III gr. szcz. ter - 0,50 m, o ile dokładność identyfikacji ich zarysów jest nie mniejsza od 0,5 m.
Przy pomiarze szcz. I gr. dokł. powinny być wraz z nimi mierzone elementy terenowe:
PROJEKTOWANIE, STABILIZACJA I POMIAR OSNOWY ZDJECIA SYTUACYJNEGO
Pomiary sytuacyjne wykonuje się w oparciu o punkty geodezyjne istniejącej osnowy poziomej, podstawowej o szczegółowej która może być w miarę potrzeb zagęszczona osnową pomiarową. W skład osnowy pomiarowej wchodzą następujące elementy geometryczne:
Punkty pośrednie leżące na bokach poligonowych lub liniach pomiarowych nazywamy punktami posiłkowymi. Odcinki prostych łączące punkty posiłkowe lub punkt poligonowy z punktem posiłkowym nazywamy linami pomiarowymi.
Przy projektowaniu osnowy pomiarowej dla zdjęcia sytuacyjnego należy stosować co najwyżej dwurzędowy układ ciągów nawiązanych dwupunktowo o maksymalnej długości 2000 m. Dopuszczalne są w wyjątkowych przypadkach nawiązanie jednopunktowe czyli tzw. ciągi wiszące przy czym nie mogą one posiadać więcej niż dwa boki.
Linie pomiarowe należy tak zakładać w terenie aby z każdej z nich można było pomierzyć jak najwięcej szczegółów terenowych. Linie pomiarowe służące do pomiaru szczegółów terenowych II i III grupy dokładnościowej metodą domiarów prostokątnych mogą być oparte na punktach I grupy dokładnościowej, jednocześnie zidentyfikowanych w terenie i na mapie lub zdjęciu fotogrametrycznym. Ciągi sytuacyjne i linie pomiarowe projektuje się w terenie sporządzając jednocześnie odpowiedni szkic tzw. szkic osnowy pomiarowej.
Przy lokalizacji punktów ciągów sytuacyjnych należy brać pod uwagę:
Długość boków od 50 - 350 m przy czym stosunek boków przyległych nie może być mniejszy niż 1:4.
STABILIZACJA PUNKTÓW OSNOWY
Punkty osnowy pomiarowej zaznacza się (markuje) w terenie a w szczególnych przypadkach stabilizuje. Typowe znaki służące do markowania to paliki drewniane, rurki drenarskie, rurki żelazne, bolce lub trzpienie żelazne. Punkty osnowy pomiarowej w szczególnych przypadkach stabilizuje się za pomocą znaków z tworzyw sztucznych. Stosowanie znaków z kamienia lub betonu jest dopuszczalne tylko w uzasadnionych przypadkach.
rys. 2 i 3
WYKŁAD 9 6.12.2001
METODY POMIARÓW SZCEGÓŁÓW SYTUACYJNYCH
Pomiary szczegółów wykonuje się następującymi metodami:
Ad. 1. Polega na pomiarze odciętej d1 i rzędnej d2 mierzonego punktu sytuacyjnego względem linii AB, na którą rzucany jest punkt P. metoda ta zalecana jest do stosowania w terenach zainwestowanych płaskich.
Ad . 2. polega pomierzeniu odległości d od stanowiska instrumentu do punktu celowania P oraz pomierzeniu kata β zawartego między kierunkiem na dany punkt B a kierunkiem na punkt P. Stanowiskami instrumentu powinny być punktyosnowy szczegółowej i pomiarowej. W metodzie tej mierzymy dwie współrzędne biegunowe, tzn. kąt poziomy i odległość, które określają położenie punktu względem linii pomiarowej.
Ad. 3. Polega na przedłużeniu dobrze widocznych konturów szczegółów terenowych (budynki, granice, budowle) aż do przecięcia z linią pomiarowa EF. Następnie mierzymy odległość d1 od punktu początkowego linii do punktu przecięcia oraz długość przedłużenia d2. Stosunek długości przedłużenia do długości odcinka przedłużanego nie może być większa niż 2:1. Przy zdejmowaniu szczegółów kąt między linią pomiarową a kierunkiem przedłużenia nie powinien być mniejszy od 45° (50g) i większy od 135° (150g). Ten sposób pomiaru stosuje się najczęściej w połączeniu z metodą domiarów prostokątnych.
Ad. 4. metoda wcięć kątowych polega na tym, że punkt zdejmowany P określany jest na podstawie pomiarów dwóch kątów mierzonych z punktów danych A i B, położonych na linii osnowy pomiarowej G i H. Kąty α i β mierzone są za pomocą teodolitu. Metoda ta ma zastosowanie przy zdejmowaniu punktów niedostępnych dla pomiaru bezpośredniego, np. filarów mostowych, zapór wodnych oraz punktów, które znajdują się w znacznej odległości od osnowy pomiarowej, jeżeli nie mamy do dyspozycji nasadki dalmierczej.
Metoda wcięć liniowych polega na pomiarze odległości d1 i d2 od punktu zdejmowanego do dwóch punktów A i B, których położenie na linii osnowy G i H jest znane.
Technologia zdjęcia szczegółów metodą ortogonalną
Zdjęcie sytuacyjne wykonuje metodą ortogonalną zespół minimum 3 - osobowy. Główne czynności pomiaru to rzutowanie punktów sytuacyjnych na poszczególne linie pomiarowe z jednoczesnym pomiarem rzędnych i odciętych. Punkty sytuacyjne należy zdejmować z jednej jak i z drugiej strony linii pomiarowej. Maksymalna długość odciętej ograniczona jest długością linii pomiarowej. Linię tę w razie potrzeby można przedłużyć o 1/3 jej długości lecz nie więcej niż 100 m. Wielkości rzędnych są natomiast ściśle określone dla poszczególnych grup szczegółów nie powinny przekraczać poniższych wartości:
|
Grupa dokładnościowa szczegółów |
||
Wymagania |
I |
II |
III |
Dopuszczalne rzędne |
25 m |
50 m |
70 m |
Dokładność pomiaru |
0,05 m |
0,05 m |
0,10 m |
Przekroczenie ustalonych wartości rzędnych dla szczegółów terenowych II i III gr. dokładnościowej jest dopuszczalne pod warunkiem wykonania pomiarów elementów kontrolnych.
Technologia zdjęcia szczegółów metodą biegunową
Metoda biegunowa pomiaru szczegółów polega na pomiarze odległości od stanowiska do punktu celu oraz kierunku na ten punkt. Zespół 3-4 osobowy. Wraz z rozwojem techniki zmieniają się sposoby terenowego pomiaru : stosując dalmierze elektromagnetyczne można ograniczyć skład grupy pomiarowej do 2 osób. Sposobem bardzo prymitywnym, ale tanim jest pomiar z wykorzystaniem nasadki dalmierczej elektrooptycznej.
Ocena dokładności zdjęcia sytuacyjnego poszczególnymi metodami:
![]()
![]()
Błąd powierzchniowy:
![]()
![]()
xp = bsinϕ
yp = bcosϕ


![]()
![]()


![]()
![]()
![]()
,
,![]()
Rys.12
WYKŁAD 10 13.12.01.
NIWELACJA POWIERZCHNIOWA
Niwelacja tras mała na celu wyznaczenie dokładnego ukształtowania terenu na obszarze długiego lecz wąskiego pasa, często jednak do różnych prac inżynierskich jak np. projektowanie nawadniania i osuszania terenów rolnych lub projektowania a następnie przeprowadzania robót ziemnych na terenach osiedlowych, sportowych i przemysłowych trzeba wyznaczyć ukształtowanie wysokościowego na obszarze o dowolnym kształcie.
Działem geodezji, który zajmuje się jednoczesnym wyznaczaniem wysokości i położenia terenu nazywa się tachimetrią. Tachimetrię wykonuje się przy użyciu teodolitu lub tachimetru. Umożliwiają one prace przy dowolnym pochyleniu osi celowej, a wiec nadają się do pomiarów w każdym terenie.
Niwelację powierzchniową wykonujemy za pomocą niwelacji przy poziomym kierunku celowania możemy więc ją stosować w terenach równinnych o niezbyt zróżnicowanym ukształtowaniu pionowym. Użycie niwelatora pozwala na dokładne wyznaczenie wysokości poszczególnych punktów, co ma duże znaczenie dla wielu prac inżynieryjnych. W zależności od określenia sytuacyjnego rozmieszczenia punktów niwelowanych rozróżniamy następujące sposoby niwelacji powierzchniowej:
Pomiar rzeźby terenu metoda niwelacji powierzchniowej i tachimetrii wykonuje się zgodnie z instrukcją G-4.
Prace przy niwelacji siatkowej składają się z dwóch zasadniczych części:
Ad. A. Najpierw projektujemy i nawiązujemy do osnowy geodezyjnej tzw. Figurę podstawową obejmującą cały mierzony teren. Jest to zwykle prostokąt, którego wymiary powinny być takie, aby zawierały całkowitą liczbę figur zapełniających (oczek siatki). Jeżeli powierzchnia niwelowana jest duża (do kilkudziesięciu ha) lub ma kształt nieregularny to projektuje się kilka przyległych figur podstawowych. Figurę podstawową orientujemy zwykle równolegle do najdłuższej linii granicznej mierzonego obszaru lub do osi przechodzącej tam drogi itp. Siatka może też być zorientowana zgodnie z kierunkiem największego spadku terenu. Wierzchołki figur podstawowych należy wyznaczyć w terenie przez odłożenie w terenie kątów prostych teodolitem o dokładności odczytu niemniejszej niż 1 min. I odłożenie długości taśmą. Jednocześnie z odmierzaniem długości wyznaczamy punkty pośrednie rozmieszczone w odległościach równych długością boków figur zapełniających. Wierzchołki figur podstawowych i odmierzone punkty pośrednie utrwala się palikami wbitymi równo z ziemią i świadkami wystającymi ponad teren. Wyznaczone w ten sposób figury podstawowe nawiązujemy do istniejącej lub założonej osnowy geodezyjnej przez zrzutowanie na nią wierzchołków lub przez zastosowanie sposobu przedłużeń aż do przecięcia się z bokami pobliskich poligonów. Nawiązane takie pozwoli nanieść wytyczona siatkę na mapę.
Gdy powierzchnia obiektu jest bardzo duża, wyznaczenie figur podstawowych a następnie siatki kwadratów od ram w terenie byłoby bardzo uciążliwe i niedokładne co wynika z konieczności odkładania wielu kątów prostych i tyczenia zbyt długich linii. W tym przypadku zagęszczamy najpierw na mierzonym terenie osnowę geodezyjną a następnie projektujemy na mapie figury podstawowe lub od razu duże oczka siatki kwadratów (100m x 100m) wyznaczając rachunkowo punkty przecięcia się boków poligonowych z liniami siatki. Punkty przecięcia się tych linii z ciągami obwodnicy nazywamy punktami końcowymi siatki. Tak zaprojektowaną siatkę przenosimy następnie w teren. Po wyznaczeniu w terenie figur podstawowych przystępujemy do wytyczenia wierzchołków figur zapełniających (oczek siatki), zwykle kwadratów. Długość boku figury zapełniającej zależy od zróżnicowania rzeźby terenu a także od przeznaczenia pomiaru i wynosi od 5 - 100 m. Jako zasadę przyjmuje się , aby powierzchnia terenu objęta jedną figurą mogła być uznana za płaszczyznę. Boki krótkie (5 m- 20 m) stosuje się przy pracach mających na celu zrównanie terenu na obszarach osiedlowych, przemysłowych lub przy urządzaniu terenów zielonych w miastach. Boki 50 - 100 m stosuje się przy pomiarach łąk i torfowisk. Wierzchołki figur zapełniających można wyznaczyć jako punkty przecięcia prostych równoległych do doków figury podstawowej. Wierzchołki utrwala się palikiem i świadkiem oraz oznacza numerem. Do oznaczenia można przyjąć numerację porządkową lub system numeracji pasów i słupów. Zazwyczaj podaje się najpierw liczbę pasa a następnie słupa.
WYKŁAD 11 10.01.2002
B) NIWELACJA SIATKI KWADRATÓW
Na mierzonym terenie lub w jego sąsiedztwie należy osadzić repery robocze w takiej liczbie, aby na 50 ha obszaru przypadał co najmniej jeden reper. Jako znaki mogą służyć metalowe haki wbijane w ścianę domu lub pale drewniane, w których głowice wbito gwóźdź z wypukłą główką. Repery robocze dowiązuje się do reperów niwelacji państwowej jeżeli znajdują się w pobliżu lub wyrównuje się je jako sieć niezależną. Wysokości wierzchołków figur zapełniających wyznacza się w ten sposób, iż poszczególne stanowiska niwelatorów łączy się w ciągi niwelacyjne. Po zaniwelowaniu w pierwszej kolejności punktów wiążących ciągu niweluje się następnie bliskie wierzchołki figur zapełniających, jako punkty pośrednie przy czym długość celowej nie powinna przekraczać 80 m. Przed rozpoczęciem niwelacji należy połączyć większe figury w grupy kwadratów, które będą niwelowane z jednego stanowiska, np. dla siatki o bokach 50 m możemy utworzyć grupy złożone z 4 kwadratów, a dla siatki o bokach 20 m grupa może mieć 25 kwadratów itp. Przed przystąpieniem do niwelacji sporządzamy szczegółowy szkic siatki, wpisujemy numery wszystkich jej wierzchołków i projektujemy grupy kwadratów. Najpierw ustalamy grupy przylegające bezpośrednio do granic obiektu a następnie grupy wewnętrzne łącząc je w pary lub kolumny. Po podzieleniu całego niwelowanego obszaru obieramy na stykach grup kwadratów te wierzchołki, które będą stanowiły punkty wiążące ciągów niwelacyjnych i oznaczamy je na szkicu. W ten sposób z wierzchołków o nr 1-21 powstał ciąg zamknięty, a z pozostałych punktów wiążących ciągi nawiązane po 1 dla każdej kolumny grupy kwadratów. Jednocześnie z obieraniem punktów wiążących ustalamy również dla każdej pary przylegających do siebie grup kwadratów jeszcze drugi punkt wspólny, który będzie spełniał rolę punktu kontrolnego. Zostanie on zaniwelowany tak samo dokładnie jak punkt wiążący i wykorzystany do tzw. krzyżowej kontroli odczytu. Pozostałe wierzchołki kwadratów zostaną zaniwelowane z poszczególnych stanowisk, jako punkty pośrednie. Niwelację rozpoczynamy od grup kwadratów położonych na obwodnicy obiektu a później przechpdzimy do niwelacji kolumn lub pasów. Na każdym stanowisku wykonujemy najpierw odczyty wstecz i w przód na punkty wiążące i na punkty kontrolne. Pomiar ten powtarzamy po zmianie wysokości instrumentu. Różnica wysokości dwóch punktów (wiążącego i kontrolnego) pomierzona ze stanowiska poprzedniego powinna się równać różnicy wysokości tych samych punktów pomierzonej ze stanowiska następnego.
p2 - p1 = w2 - w1
p2 + w1 = w2 +p1
KONTROLA KRZYŻOWA
Jeżeli warunek powyższy zostanie spełniony z dokładnością ± 3 mm pomiar można uważać za wykonany prawidłowo. Na punktach wiążących i kontrolnych wykonujemy odczyty z dokładnością do 1 mm, a łaty ustawiamy pionowo za pomocą libel. Pozostałe wierzchołki kwadratów niwelujemy jako punkty pośrednie, a odczyty na nich wykonujemy z dokładnością 1cm. Jako pośrednie niwelujemy dodatkowo również te punkty, które są położone w zagłębieniach lub na wzniesieniach, znajdujące się w jednym z oczek siatki. Położenie sytuacyjne tych punktów określamy przez rzutowanie ich za pomocą węgielnicy na boki odpowiednich kwadratów. Jeżeli pracę wykonujemy niwelatorem z kołem poziomym to położenie tych punktów możemy wyznaczyć metodą biegunową. Wyniki pomiarów niwelacyjnych zapisujemy w takim samym dzienniku jak do niwelacji przekrojowej. Jeżeli siatka składa się z kwadratów o bokach większych niż 50 m to pojedynczych figur nie łączymy w grupy lecz stanowiska niwelatora obieramy w środku każdego kwadratu. Ciągi niwelacyjne będą przebiegać podobnie jak [poprzednio, na każdym stanowisku niwelujemy tylko punkty wiążące i punkty kontrolne.
OBLICZENIE NIWELACJI SIATKOWEJ
Tworzymy ciągi niwelacyjne do obliczenia niwelacji siatkowej łącząc w jedną całość kolejne punkty wiążące, jeżeli jednocześnie z nimi niwelujemy punkty kontrolne to otrzymane ciągi niwelujemy tylko w jednym kierunku. W przeciwnym przypadku wykonujemy niwelację w powrotnym kierunku już tylko samych punktów wiążących. Według instrukcji G-4 dopuszczalna odchyłka różnicy wysokości przy podwójnej niwelacji to ±![]()
; L - długość ciągu w km. Do wyrównania obwodnicy i ciągów wewnętrznych stosujemy metodę punktów węzłowych. Wysokości punktów węzłowych otrzymujemy sumując wyrównane różnice wysokości, a punktu pośrednie obliczamy sposobem wysokości osi celowej i zapisujemy je w dzienniku i na mapie z dokładnością do 1 cm.
3. NIWELACJA PUNKTÓW ROZPROSZONYCH
Na terenach o bardziej urozmaiconej rzeźbie lub zabudowanych czy zarośniętych wykonuje się niwelację powierzchniową sposobem punktów rozproszonych używając do tego celu niwelatora z kołem poziomym i dalmierzem kreskowym. Podstawą takiego pomiaru jest osnowa sytuacyjno-wysokościowa. Jej punkty będą służyły jako stanowiska niwelatora, z których wykonywać się będzie pomiar poszczególnych punktów.
Punktów rozproszonych nie stabilizuje się palikami, więc łaty stawia się bezpośrednio na ziemi, a odczyty na nich wykonuje się z dokładnością do 1 cm. Z tego względu zasięg celowych może być zwiększony do 150 m. Ponieważ jednak równocześnie wyznaczamy też odległość poszczególnych punktów dalmierzem kreskowym (nie dotyczy dalmierza elektromagnetycznego), którego dokładność maleje ze wzrostem odległości, zasięg celowej zależy też od związku między dokładnością dalmierza a dokładnością wyrażenia zmierzonej odległości w skali sporządzanej mapy. Z tego względu maksymalna długość celowej wynosi 70 m dla skali 1:500 i 150 m dla skali 1:1000. Osnowę sytuacyjną będzie stanowiła istniejąca i odpowiednio zagęszczona sieć poligonowa lub sieć niezależna złożona z obwodnicy i ciągów wewnętrznych. Aby uzyskać dostateczną gęstość stanowisk instrumentu można wytyczyć na dłuższych bokach poligonowych punkty dodatkowe na prostej lub zakładać krótkie (max. 300 m) ciągi wiszące. Staramy się aby odległości między stanowiskami instrumentu nie przekraczały 200 m. Jeżeli dla mierzonego terenu istnieje mapa sytuacyjna to jako stanowiska można obierać punkty, których położenie zostało na mapie dokładnie określone. Zagęszczające punkty osnowy sytuacyjnej utrwalamy palikami wbitymi równo z powierzchnią terenu i oznaczamy numerami na wbitych obok światkach. Pomiar i wyrównanie osnowy zagęszczonej prowadzimy z dokładnością przewidzianą dla ciągów sytuacyjnych w instrukcji G-4.
WYKŁAD 12 21.02.2002
Aby uzyskać osnowę wysokościową do pomiaru punktów rozproszonych wykonuje się niwelację stanowisk. Niwelowane stanowiska dowiązujemy do znajdujących się w pobliżu reperów wysokościowych, a następnie obliczamy i wyrównujemy. Mając przygotowaną osnowę sytuacyjno-wysokościową przystępujemy do niwelacji poszczególnych punktów terenu. Praca przebiega następująco:
jeżeli dysponujemy niwelatorem optycznym:
- po ustawieniu instrumentu na stanowisku mierzymy przy pomocy ustawionej łaty wysokość instrumentu ( i ) na zaniwelowanym paliku.
- celujemy na łatę lub tyczkę ustawioną na jednym ze stanowisk sąsiednich i wykonujemy odczyt na limbusie przez co wyznaczamy kierunek początkowy (orientację), od którego będziemy odkładać kierunki do poszczególnych punktów w terenie. Instrukcja zaleca, aby taki odczyt orientacyjny wykonać powtórnie po zakończeniu pomiaru na stanowisku.
- celujemy na łatę ustawianą kolejno na obranych charakterystycznych punktach terenu, czyli na tzw. pikietach, i dla każdej pikiety odczytujemy:
a)położenie nitki środkowej (s) oraz dwóch nitek dalmierczych (g - górnej, d - dolnej)
b)kierunek na limbusie
Odczyty nitek sprawdza się od razu ze wzoru: g + d = 2s.
Znając różnicę odczytów kreski górnej i dolnej ![]()
, obliczamy odległość ![]()
, gdzie:
k -stała mnożna, c - stała dodawania dalmierza.
Wszystkie pomierzone punkty nanosi się na szkic polowy.
W przypadku posługiwania się niwelatorem elektronicznym odczytujemy od razu odległość i kąt poziomy. W skład zespołu wykonującego niwelację terenową sposobem punktów rozproszonych wchodzą: kierownik zespołu obierający punkty w terenie i wykonujący szkic, obserwator pracujący przy niwelatorze i wykonujący odczyty, oraz 2-3 pomiarowych ustawiających łaty na punktach wskazanych przez kierownika. Pikiety w terenie obiera się tak, aby przy najmniejszej ich liczbie najlepiej zobrazować ukształtowanie terenu. Należy więc z reguły ustawiać łatę na tzw. punktach szkieletowych, czyli na najwyższej linii grzbietu i najniższej linii doliny (ścieku), a ponad to na górnej i dolnej krawędzi zbocza na wszystkich punktach załamania spadku oraz najwyższych punktach wzniesień i najniższych punktach zagłębień. Dla łatwiejszej orientacji należy równocześnie z pomiarem prowadzić szkic polowy i zaznaczać na nim: stanowiska niwelatora, kierunki orientacji limbusa, położenie wszystkich pikiet o ich numerację, kierunki spadku terenu między pikietami oznaczone strzałką, przebieg zasadniczych linii szkieletowych, a nawet przybliżony przebieg warstwic. Co pewien czas ( np. co 10 stanowisk łaty ) należy sprawdzić numerację pikiet zaznaczonych na szkicu i wpisanych do dziennika.
Dziennik niwelacji punktów rozproszonych.
Różni się od innych dzienników niwelacyjnych tym, że zawiera kolumny do zapisywania odczytów koła poziomego oraz odczytów kresek dalmierczych i obliczenia odległości. W przypadku wykonywania prac z użyciem instrumentu elektronicznego wszystkie wyniki pomiarów można rejestrować w rejestratorze danych połączonym z instrumentem bez konieczności prowadzenia ręcznych zapisów w klasycznym dzienniku.
4. NIWELACJA TERENOWA SPOSOBEM PROFILI PODŁUŻNYCH I POPRZECZNYCH.
W celu wykonania niwelacji powierzchniowej sposobem profili podłużnych i poprzecznych należy na mierzonym terenie założyć sieć ciągów sytuacyjno-wysokościowych nawiązaną lub niezależną. Węzły ciągów I rzędu powinny być możliwie równomiernie rozmieszczone w terenie. W razie potrzeby można stosować zagęszczenie ciągami II rzędu. Pomiary wysokościowe przeprowadza się tak jak przy niwelacji profili (tras). Wzdłuż boków poligonowych wykonuje się niwelację podłużną a równocześnie lub po niej niwelowane są profile poprzeczne. Wyznacza się je za pomocą węgielnicy a długość ich nie powinna przekraczać 100 m. Odległość między profilami nie powinna przekraczać 100 m a odległość między pikietami nie powinna przekraczać 50 m. Niwelacje sposobem profili stosowano często gdy pomiary wysokościowe wykonywane były za pomocą niwelatora bez koła poziomego a zastosowanie niwelacji siatkowej było utrudnione ze względu na zbyt urozmaiconą rzeźbę terenu. Obecnie pracochłonną niwelację profili zastępuje się niwelacją punktów rozproszonych. Niwelacja profili stosowana jest jeszcze do sporządzania map sytuacyjno-wysokościowych wąskich i długich dolin rzecznych dla celów budowli wodnych oraz wówczas, gdy trzeba wykonać obliczenia robót ziemnych. Wszystkie pomiary wykonuje się zgodnie z instrukcjami G-2 i G-4.
„Geodezja” Ligowicki,
powtórzyć: prace kameralne przy pomiarach wysokościowych, pomiar kąta pionowego, wyznaczenie miejsca zera (błędu indeksu).
rys. 4 i 5
WYKŁAD 13 28.02.02.
Temat: Niwelacja trygonometryczna.
Terminy „niwelacja trygonometryczna” i „trygonometryczny pomiar wysokości” często (również w poniższym tekście) używane są zamiennie, jednakże w rzeczywistości są to dwa odrębne pojęcia. Niwelacja trygonometryczna dotyczy podawania wysokości punktów nad poziomem morza, natomiast trygonometryczny pomiar wysokości dotyczy podawania wysokości obiektu, np. wysokości komina.
Celem niwelacji trygonometrycznej jest wyznaczenie wysokości punktów względem przyjętego poziomu odniesienia, różnic wys. punktów oraz wys. obiektów pionowych takich jak : budynki, wieże, kominy, maszty itd. ( trygonometryczny pomiar wys.). Wielkości te określa się na podstawie pomiaru kątów pionowych „α” lub odległości zenitalnych „z” oraz odległości poziomej „d” miedzy stanowiskiem instrumentu a mierzonym obiektem. Zasięg niwelacji trygonometrycznej jest znacznie większy niż niw. geometrycznej, która służy do wyznaczania różnic wysokości punktów bliskich. Jeżeli odległość „d” jest niewielka to najczęściej mierzymy ją bezpośrednio np. taśmą lub stosujemy dalmierze optyczne (elektroniczne). Dla dużych odległości „d” pomiar wykonuje się poprzez założenie konstrukcji geometrycznej (np. wcięcie w przód), bądź tez oblicza się odległość „d” ze współrzędnych, jeśli są one dane. Przy mniej dokładnych pomiarach można również odległość „d” pomierzyć na mapie.
Określenie wysokości punktów metoda niwelacji trygonometrycznej stosujemy wtedy, gdy warunki terenowe uniemożliwiają lub utrudniają wykonanie niwelacji trygonometrycznej. Przykłady zastosowania:
- wyznaczanie wysokości punktów oddzielonych przeszkodami lub niedostępnych np. punktów triangulacyjnych, wież, kominów fabrycznych itp.
Niwelacja trygonometryczna jest znacznie szybsza w wykonaniu niż niwelacja geometryczna, lecz daje wyniki mniej dokładne. Dokładność pomiarów wysokości bada się w granicach cm i zależy od wielkości elementów „α” i „d” oraz dokładności ich określenia.
Znając wysokość punktu A „HA” oraz różnice wysokości punktów A i B „ΔhAB” możemy określić wysokość punktu B „HB”.
Jeżeli zakładamy, że A jest znane, wysokość B obliczamy:
Pomiar kąta pionowego wykonujemy zwykle teodolitem ustawionym na statywie nad punktem A celując nie bezpośrednio na punkt B, lecz na sygnał ustawiony nad tym punktem. Dlatego tez przy obliczaniu wysokości musimy uwzględnić wysokość instrumentu „i” , która mierzymy zwykle ruletką lub łata niwelacyjna jako odległość po miedzy pozioma osią obrotu lunety teodolitu a główna powierzchnią znaku geodezyjnego w punkcie A oraz wysokość sygnału „l”.
Powyższe wzory służą do określenia wysokości punktu B jeśli dana jest wysokość stanowiska A. Jeśli zachodzi sytuacja odwrotna tzn. dana jest wysokość punktu B lub C, zaś nieznana jest wysokość stanowiska A, wówczas szukana wielkość HA równa jest:
Zagadnienie to rozpatrzymy dla trzech przypadków:
Ad. a
Mierzone: α1 , α2 , d
Szukane: w
Jeżeli mierzony obiekt jest dostępny i można pomierzyć jego odległość od stanowiska instrumentu wówczas postępujemy następująco: celujemy na główny punkt obiektu A mierząc kąt pionowy α1, następnie celujemy na dolny punkt obiektu B mierząc kąt pionowy α2. Wysokość obiektu „w” obliczamy z podanego wzoru.
Uwaga: wzór ten jest słuszny zarówno dla kątów dodatnich jak i ujemnych.
Ad. b
Przy obiekcie, którego wysokość mamy określić ustawiamy pionowo łatę niwelacyjną o znanej wysokości „k”, następnie w możliwie najbliższej odległości od mierzonego obiektu ustawiamy teodolit w ten sposób aby z jego stanowiska widać było górę i dół łaty, po czym mierzymy kąty pionowe α1 ,α2 , α3
Mierzone lub dane: h, α1 ,α2 , α3
Szukane: d, w
Ad. c
dwa przypadki:
- Aby pomierzyć wysokość obiektu niedostępnego należy ustawić teodolit kolejno na dwóch stanowiskach S1 i S2 w ten sposób aby odległość „a” między nimi mogła być dokładnie bezpośrednio pomierzona. Punkty S1 i S2 i mierzony obiekt powinny ponadto leżeć w jednej płaszczyźnie pionowej. Na stanowisku S1 i S2 mierzymy kąty pionowe: α1 , α2 na stanowisku S1 oraz α'1 ,α'2 na stanowisku S2, celując na wierzchołek i spód obiektu. Mierzymy także odległość a = | S1 , S2 |.
rys. 6
WYKŁAD 14 07. 03. 2002.
Uwzględnienie wpływu krzywizny Ziemi i refrakcji
Z wiadomości poznanych poprzednio wiemy, że pomiary wysokościowe obarczone są wpływami kulistości Ziemi, co powoduje, że poziom odniesienia nie może być płaszczyzną poziomą ponieważ ze wzrostem długości celowej powoduje to duże błędy.
Ponadto na skutek niejednakowej gęstości warstw powietrza promienie świetlne biegnące od punktu celu do obserwatora ulegają załamaniu czyli zakrzywieniu przebiegając po tzw. Krzywej refrakcji skierowanej wypukłością ku górze. Wpływ krzywizny Ziemi na pomiar różnicy wysokości dwóch punktów wynosi:
![]()
poprawka dh ma zawsze znak plus.
Wpływ refrakcji wyraża się wzorem:
![]()
k - współczynnik refrakcji zależny od temperatury, wilgotności i ciśnienia (średnio k=0,13 na naszych szerokościach.
Poprawka r ma zawsze znak minus.
Łączna poprawka na krzywiznę Ziemi i refrakcji:
![]()
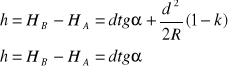
Stąd wzór na określenie wysokości punktu B obserwowanego z punktu A przyjmie postać:
![]()
skąd:
![]()
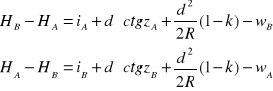
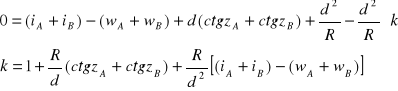
II SPOSÓB
Po ustawieniu na dwóch punktach A i B dwóch tej samej klasy teodolitów mierzymy jednocześnie w dwóch położeniach lunety kąty zenitalne celując na tarcze sygnałowe w wysokościach ![]()
i ![]()
. Następnie układamy równania typu jak poprzednio:
Dokładność określenia różnicy wysokości przy niwelacji trygonometrycznej.
Wynika ze stosowania wzorów i dokładności pomiarów. Wzory te:
Obliczenie średniego błędu różnicy wysokości ![]()
polega na obliczeniu średniego błędu funkcji h, dla (1) wzoru będzie:

a dla wzoru (2):
![]()
Średnie błędy różnic wysokości h w centymetrach podane są w tabeli:
|
1° |
5° |
10° |
15° |
500m |
±1cm |
1 |
1 |
1 |
1000m |
2 |
3 |
3 |
3 |
2000m |
5 |
5 |
6 |
6 |
3000m |
8 |
8 |
9 |
10 |
4000m |
12 |
12 |
12 |
13 |
5000m |
16 |
16 |
16 |
18 |
WYKŁAD 15 14.03.2002
Tachimetria
1. Wiadomości ogólne: słowo tachimetria pochodzi z j. Greckiego i znaczy „szybki pomiar”. Jako metoda pomiaru tachimetria pojawiła się na początku XIX w. po wprowadzeniu do lunety teodolitu płytki ogniskowej z nitkami dalmierczymi umożliwiającymi optyczny pomiar odległości. Tachimetria była określana jako jednoczesny pomiar sytuacyjno-wysokościowy realizowany przy użyciu teodolitów wyposażonych w dalmierz kreskowy lub diagramowy. W obu przypadkach dokładność jest niska ponieważ tachimetria zwykła i diagramowa umożliwia określenie położenia punktu z błędem ±5-10 cm. Z tego powodu tak rozumiana tachimetria (nitkowa i diagramowa) może być obecnie stosowana do pomiaru rzeźby terenu i pomiarów sytuacyjnych trzeciej grupy. W miarę rozwoju technik pośredniego pomiaru odległości pojęcie tachimetrii uległo z czasem poszerzeniu obejmując jednocześnie pomiary sytuacyjne i wysokościowe wykonywane różnymi instrumentami (tachimetrami) często o dokładności znacznie przekraczającej dokładność osiąganą przy użyciu tachimetrów zwykłych lub diagramowych. Przyczyniły się do tego dalmierze dwuobrazowe umożliwiające pomiar odległości z błędem względnym 1:1700 ÷ 1:5000 a więc zbliżony do dokładności pomiaru taśmą. Tachimetria ta określana jako tachimetria o podwyższonej dokładności jest metodą pomiarową, która szczególnie zyskała na znaczeniu dzięki zastosowaniu połączonych z teodolitami dalmierzy elektro-magnetycznych, a zwłaszcza tachimetrów elektronicznych TOTAL STATION.
Położenie przestrzenne pkt. P
W przestrzennym układzie współrzędnych prostokątnych położenie pewnego (dowolnego) punktu P można wyznaczyć za pomocą kąta pionowego α, poziomego β oraz odległości d′. Położenie mierzonego punktu P zwanego potocznie pikietą określają domiary biegunowe β i d, zaś wysokość HP można wyznaczyć ze wzoru:
HP = HSt + i + h - l h = d*tgα = d*ctgz
gdzie: h - przewyższenie, l - odczyt, i - wysokość instrumenty.
W przypadku gdy i = l odpowiednio wysokość punktu: HP = HSt + h.
Tachimetria jest metodą pomiaru podobną do niwelacji punktów rozproszonych, od której różni się rodzajem instrumentów. Instrumentem tym jest tachimetr umożliwiający dowolne nachylenie lunety zamiast niwelatora z pozioma osią celową. Pozwala to na celowanie oraz określenie położenia przestrzennego dowolnie rozmieszczonych punktów charakteryzujących sytuację lub rzeźbę terenu. Zakres wykorzystywania pomiaru tachimetrycznego zależy od rodzaju i możliwości pomiarowych tachimetru, a przede wszystkim dokładności i zasięgu zainstalowanego w nim dalmierza optycznego lub elektronicznego. Przeważnie tachimetria jest stosowana do sporządzania map sytuacyjno-wysokościowych dla celów projektowych, planowania przestrzennego, inwentaryzacji sieci uzbrojenia itp.
Wytyczne techniczne G-4-3
rys. 7
2.Osnowa pomiaru tachimetrycznego:
Czynności związane z tachimetrycznym zdjęciem syt. - wys. wybranego obszaru poprzedza założenie osnowy pomiarowej składającej się z punktów o znanym położeniu przestrzennym określanym z reguły za pomocą współrzędnych prostokątnych płaskich X, Y oraz wysokości Z (h). Typowymi znakami geodezyjnymi są paliki drewniane, rurki drenarskie lub żelazne bolce metalowe, znaki z tworzyw sztucznych itp.
Wzajemna odległość sąsiednich stanowisk musi być dobrana z uwzględnieniem dopuszczalnej długości celowej związanej z rodzajem użytego tachimetru. Dotyczy to szczególnie tachimetrii wykonywanej tachimetrami optycznymi, dla których najdłuższa celowa musi być mniejsza od 150 m. Ograniczenia te w niewielkim stopniu dotyczą tachimetrów elektronicznych gdzie maksymalna celowa dla szczegółów I grupy dokładnościowej może dochodzić do 700 m. Ze względów ekonomicznych i dokładnościowych jako punkty nawiązania i stanowiska tachimetru należy wykorzystać istniejące na danym terenie punkty poziomej i wysokościowej osnowy szczegółowej.
Pozioma osnowa pomiarowa zakładana dla wyznaczenia stanowisk tachimetrycznych może składać się z ciągów sytuacyjnych I rzędu nawiązanych do punktów osnowy wyższej klasy oraz II rzędu nawiązanych do ciągów sytuacyjnych I rzędu. Ciągi te powinny być obustronnie nawiązane oraz zapewniać dogodne warunki dla zdjęcia szczegółów . Wyjątkowo dopuszcza się zakładanie ciągów wiszących , które mają mieć maksymalnie 2 boki . Dokładność pomiaru musi zapewnić nieprzekraczanie wartości +/- 0,20 m średniego błędu położenia punktu mp względem punktów nawiązania . Osnowę pomiarową można wstępnie zaprojektować na istniejącej mapie sytuacyjnej lub od razu w terenie sporządzając przy tym szkic osnowy . Długość ciągów sytuacyjnych nie powinna być większa niż 2 km , zaś długości boków powinny mieścić się w zakresie od 50 do 350 m , przy czym stosunek boków przyległych nie może być mniejszy od 1:4 . Punktami wykorzystywanymi jako stanowiska tachimetru mogą być także punkty posiłkowe ( pośrednie ) zakładane na bokach osnowy szczegółowej i pomiarowej . Boki należy mierzyć dwukrotnie nie przekraczając dopuszczalnej różnicy dwukrotnego pomiaru : dL = u√L , gdzie u=0,0059 i L - długość boku wyrażona w metrach
Dla około 30% przypadków można przyjąć za odchyłki dopuszczalne wartości dwukrotnie większe niż dL.
Pomiar kątów w ciągach sytuacyjnych wykonuje się w jednej serii ( poczecie ) instrumentem gwarantującym uzyskanie średniego błędu pomiaru kąta w granicach +/- sekund stopniowych . Rozbieżność wyników z obu półserii nie może przekraczać jednej minuty .
Jeśli zastosowanie tachimetrii ogranicza się wyłącznie do pomiaru rzeźby terenu wówczas średni błąd położenia punktu osnowy może być zwiększony do +/- 0,5 m .
Długości boków ciągów tachimetrycznych należy mierzyć dwukrotnie z błędem względnym nie większym niż :
1:3000 w terenach zurbanizowanych
1:5000 w terenach rolno - leśnych
WYKŁAD 16 21.03.02.
Dokładność pomiarów niektórych kątów powinna charakteryzować się błędem średnim nie przekraczającym wartości: 1) +/- 30” w terenach zurbanizowanych
2) +/- 60” w terenach rolno-leśnych
Instrukcja G4 dopuszcza wykonanie zdjęcia szczegółów na linię pomiarową, opartej na sytuacji terenowej, tzn. na dwóch jednoznacznie zidentyfikowanych na mapie zasadniczej i w terenie, punktach I grupy dokładnościowej.
Wysokościowa osnowa pomiarowa: składająca się z reperów roboczych potrzebnych do wyznaczenia wysokości stanowisk tachimetrycznych charakteryzuje się średnim błędem +/- 20 mm / 1 km. Zgodnie z instrukcja G4, do nowej osnowy mogą zostać włączone i ponownie wyrównane istniejące ciągi niwelacyjne, pod warunkiem że dla punktu środkowego ciągu średni błąd wysokości nie przekracza +/- 5 cm.
W projekcie pomiarów sieci wysokościowej należy uwzględnić następujące wymagania:
Środki długości odcinków zawartych między sąsiednimi znakami wysokościowymi ma wynosić 0,5 km na obszarze zabudowanym i 1,5 km poza tymi obszarami. Ciągi powinny być obustronnie nawiązane do punktów sieci niwelacyjnej klasy II lub wyższej albo do punktów węzłowych zakładanej sieci.
W trudnym terenie dopuszcza się stosowanie wysokościowych ciągów wiszących o długości nie wyższej niż 300 m, złożonych maksymalnie z dwóch stanowisk. Zalecana metoda pomiaru wysokości osnowy pomiarowej jest niwelacja geometryczna ze środka w kierunku głównym i powrotnym, przy długości celowych do 50 m (max 75 m).
Tachimetryczny pomiar rzeźby terenu:
Sprzęt tachimetryczny obejmuje:
Szkic tachimetryczny: podczas sporządzania go stosujemy podobne zasady i oznaczenia jak przy szkicu niwelacji punktów rozproszonych. Szkic jest więc wykreślany na znormalizowanym formularzu i ilustruje zwykle obszar stanowiący pewną zwarta całość zamkniętą naturalnymi liniami odgraniczajacymi, takimi jak: drogi, ulice, miedze, granice działek itp. Szkic jest wykonywany w przybliżonej skali i przeważnie przedstawia teren pomierzony z jednego stanowiska tachimetrycznego. Przy małej ilości pikiet zdejmowanych z pojedynczych stanowisk szkic może obejmować kilka stanowisk tachimetrycznych.
Na zawartość szkicu tachimetryczego składają się:
itd.
Tachimetryczne prace kameralne: Ciąg tachimetryczny tego procesu rozpoczyna się od założenia osnowy, po czym następuje pomiar tachimetryczny z rejestracją obserwacji i kodów obiektów oraz sposobu połączeń zdejmowanych punktów. Informacje te już w trakcie prac terenowych mogą być sukcesywnie transmitowane do przenośnego komputera, który za pomocą oprogramowania dokonuje ich przetworzenia, polegającego między innymi na obliczeniu X, Y, H (Z) wybranych punktów w przyjętym układzie współrzędnych i wysokości oraz edycji mapy sytuacyjno-wysokościowej pomierzonego obszaru, która dzięki elektronicznemu przekazowi danych obserwacyjnych może być w biurze automatycznie wykreślona przez ploter. Wyniki uzyskanych z pomiarów tachimetrycznych można wykorzystać do uzupełniania baz danych systemów informacji o terenie (SIT), aktualizacji operatu ewidencji gruntów i budynków, sieci uzbrojenia terenu, realizacji zadań planowania przestrzennego oraz innych celów gospodarczych i projektowych.
W ramach tradycyjnej technologii wykonywania tachimetrii prace kameralne składają się z następujących etapów:
W trakcie prac związanych z umieszczeniem warstwic na mapie zalecane jest przestrzeganie zasad:
W terenach zainwestowanych i sztucznie ukształtowanych należy po skartowaniu wszystkich pikiet wysokościowych dokonać generalizacji polegającej na wyeliminowaniu punktów, które nie maja istotnego znaczenia dla określenia układu przestrzennego terenu.
W zależności od skali przyjmujemy ciecie warstwicowe:
1: 500 0,5 m
1: 1 000 1,0 m
1: 2 000 i 1: 5 000 2,5 - 5 m
Przy nachyleniach terenu od 0o-5o zmniejszamy cięcia warstwicowe do 0,5 cięcia zasadniczego.
Do określenia średniego błędu wysokości warstwicy mh wykorzystujemy wzór Hoppega:
gdzie: α - kąt pochylenia terenu
a, b - współczynniki ustalone doświadczalnie
a∈(0,1; 0,3)
b∈(0,5; 3)
Kontrola dokładności rysunku rzeźby terenu polega na wykonaniu w terenie metoda niwelacji geometrycznej profilów kontrolnych i porównaniu wysokości ich punktów charakterystycznych z odpowiednikami tych punktów, ale uzyskanymi z mapy warstwicowej. Po obliczeniu różnicy ΔH pomiędzy wysokościami tych punktów z pomiarów kontrolnych i z mapy wysokościowej można obliczyć średni błąd położenia warstwicy według wzoru:
n - ilość punktów kontrolnych
Zgodnie z wymaganiami instrukcji K1 średni błąd wysokości warstwic nie może przekroczyć:
Wyniki kontroli rysunku rzeźby na mapie należy wpisać do jej metryki.
RYS. 8
WYKŁAD 17 11.04.2002
SPRZĘTY GEODEZYJNE
Tachimetr jest przyrządem geodezyjnym umożliwiającym jednoczesny pomiar sytuacyjny i wysokościowy w wyniku którego ze stanowiska instrumentu można wyznaczyć położenie przestrzenne dowolnego punktu terenowego (pikiety). Położeni sytuacyjne pikiety określa się metodą biegunową, czyli przez pomiar kąta poziomego i odległości zredukowanej lub odległości skośnej i kąta pionowego. Wynika stąd, że każdy tachimetr musi być wyposażony w koło poziome, pionowe dalmierz. Tachimetr optyczny stanowi połączenie teodolitu z dalmierzem optycznym: zwykłym (kreskowym), diagramowym lub dwuobrazowym. Tachimertem zwykłym jest niemal każdy teodolit optyczny, ponieważ umożliwia pomiar obydwu rodzajów kątów, zaś na płytce ogniskowej w jego lunecie z reguły znajduje się dalmierz kreskowy zwanym też dalmierzem nitkowym lub dalmierzem Reichenbacha.
W tachimetrach autoredukcyjnych firmy Zeiss takich jak Deltha, Kedta lub ich odpowiednikach produkowanych przez inne firmy (Wild, Kern, Opton) można od razu określić odległość poziomą, a w niektórych przypadkach także i przewyższenie. Optyczny pomiar odległości opiera się na rozwiązaniu trójkąta paralaktycznego. Rozwiązania wykorzystują dwa rodzaje konsrtukcji tego trójkąta.
a)
ε - kąt paralaktyczny
b)
![]()
Optyczne dalmierze dwuobrazowe działają w oparciu o rozwiązanie trójkąta prostokątnego z rys. b.
Tachimetry optyczne stopniowo wychodzą z użycia zastępowane przez dokładniejsze, szybsze w pomiarze i wygodniejsze w użyciu tachimetry elektroniczne. Są to albo teodolity połączone z nasadkami dalmierzami elektromagnetycznymi oraz zintegrowane tachimetry elektroniczne określane wyrażeniem Total Station. Tachimetr tego typu stanowi połączenie teodolitu elektronicznego z dalmierzem elektrooptycznym oraz rejestrator wewnętrzny służący do automatycznego rejestrowania i przetwarzania danych. Poszczególne zespoły umieszczone są we wspólnej obudowie tworząc jednolity system pomiarowo-obliczeniowy. Stosuje się również nasadki dalmiercze (dalmierz nasadkowy) nakładane na teodolit optyczny lub elektroniczny.
Do najbardziej znanych w Polsce tachimetrów elektronicznych należą firmy europejskie: Leitz-Wild (Leica), szwedzki AGA Geotronics (obecna nazwa : Spectra Precisions), Carl Zeiss; oraz japońskie: Sokkia, Topcon, Nikon, Pentax.
TACHIMETRY OPTYCZNE
Siatka celownicza z kreskami dalmierczymi
Przy użyciu pionowo ustawionej łaty z podziałem centymetrowym można określić odległość
d = kl + c pomiędzy stanowiskiem instrumentu a łatą, gdzie
k - stała mnożna dalmierza kreskowego przywierająca najczęściej wartość 100
c - stała dodawania dalmierza kreskowego, najczęściej c=0 (czasem ok. 30 cm)
l - długość odcinka obrazu łaty widocznego w lunecie pomiędzy kreskami dalmierczymi, zatem odcinek ten jest równy: l = g - d.
Podczas prac tachimetrycznych luneta teodolitu może być nachylona pod dowolnym kątem α (odległość zenitalną z) i wówczas dla otrzymania odległości zredukowanej do poziomu stosujemy wzór:
wys. pikiety: ![]()
.
Do tachimetrii zwykle jest dziennik.
Dokładność pomiaru tachimetrami zwykłymi można ocenić przez zastosowanie prawa przenoszenia się błędów średnich według wzorów:
Tachimetry te stosowano dla poprawienia dokładności tachimetrii i wyeliminowania z prac kameralnych konieczności obliczeń odległości zredukowanych oraz przewyższeń k w dziennikach tachimetrycznych. W tachimetrach diagramowych zastąpiono kreski dalmiercze krzywymi diagramu.
Diagram krzywy w instrumencie Deltha 10A
Punktem celowania jest przecięcie kreski pionowej i krzywej podstawowej (zerowej). Przebieg współkształtny z krzywą zerową posiadają dwie inne krzywe, a mianowicie krzywa odległości dla stałej k=100 (nad krzywą podstawową) oraz krzywe odległości dla stałej k=200 (pod krzywą podstawową).
Krzywe wysokości mają przebieg ukośny i są opisane wartościami odpowiadającymi im stałej mnożnej: ±10, ±20, ±50, ±100.
Łata stosowana do tachimetru Dehlta ma długość 4m, centymetrowy podział oraz indeks zerowy na wysokości 1.4 m od stopki łaty.
(Dziennik tachimetrii autoredukcyjnej - ksero)
Dalmierze optyczne dwuobrazowe realizujące trójkąt paralaktyczny realizowane przez instrumenty Zeiss Jena: Redta 002 oraz BRT 006 wg rys. b.
Realizacja prostokątnego trójkąta paralaktycznego w tachimetrze Redta następuje dzięki przesłonięciu połowy pola widzenia lunety przez klin optyczny znajdujący się przed obiektywem.
O - obraz bez klina
O'- obraz z zastosowaniem klina
Powoduje on przesunięcie wiązki promieni świetlnych względem drugiej wiązki promieni pomijających klin, które wpadają do wnętrza lunety przez nie przesłoniętą część obiektywu. Dzięki temu obserwator widzi w lunecie jednocześnie dwa obrazy.
Rys.13 a , b , c , d.
WYKŁAD 18 18.04.2002.
Tachimetr elektroniczny stanowi połączenie teodolitu optycznego lub elektronicznego, umożliwiającego wyznaczanie kątów poziomych i pionowych oraz dalmierza elektromagnetycznego realizującego na drodze elektrycznej pomiar odległości. Oprócz typowej optyki lunety, podstawowymi modułami współczesnego tachimetru elektronicznego są: bateria (źródło zasilania), urządzenie kątomiercze, dalmierz elektrooptyczny, mikrokomputer, klawiatura numeryczna lub alfanumeryczna, wyświetlacz ciekłokrystaliczny, rejestrator oraz port do połączenia instrumentu z komputerem w celu dwukierunkowej transmisji danych.
Działanie dalmierza elektromagnetycznego opiera się na wyznaczeniu czasu t, podczas którego sygnał pomiarowy przenoszony za pomocą fali elektromagnetycznej przebywa mierzona odległość D w kierunku tam i z powrotem. Większość dalmierzy geodezyjnych stanowią dalmierze fazowe, których nadajnik wysyła ciągłą sinusoidalna falę elektromagnetyczna, zaś pomiar czasu t odbywa się w sposób pośredni na zasadzie wyznaczenia tzw. przesunięcia czasowego (różnica faz: fazy emitowanej z nadajnika i fazy fali powracającej do odbiornika po jej odbiciu (retransmisji) przez reflektor zwrotny.
W dalmierzach elektrooptycznych (świetlnych) nośnikiem sygnałów pomiarowych są fale elektromagnetyczne z zakresu światła widzialnego lub podczerwieni, zbliżonej długości fal do światła.
Pomiar odległości dalmierzem elektrooptycznym polega na wysyłaniu zmodulowanej fali świetlnej przez nadajnik N ustawionym w punkcie początkowym mierzonej odległości w kierunku jej punktu końcowego, na którym jest reflektor zwrotny odbijający falę, zaś ta kieruje się ponownie do punktu początkowego, gdzie jest przyjmowana przez odbiornik 0 umieszczony w tym samym instrumencie co nadajnik.
W tachimetrach elektronicznych produkowanych współcześnie procedura związana z określeniem odległości i połączeniem wszystkich liczb potrzebnych do zestawienia wyników pomiarów odległości i kątów jest realizowana automatycznie przez mikrokomputer instrumentu, zaś po wycelowaniu na reflektor i naciśnięciu odpowiedniego przycisku klawiatury, na wyświetlaczu ukazuje się końcowy rezultat pomiaru zależny od nastawionego wcześniej szablonu wyświetlania wyników w postaci zespołów odczytów obejmujących: kąt pionowy, kąt poziomy, długość skośna (rzeczywista), odległość zredukowana, przewyższenie lub współrzędne pikiety. Niezbędnym wyposażeniem dalmierza elektromagnetycznego jest reflektor zwrotny R, umieszczony na końcu pomierzonego boku i zaopatrzony w element kierujący sygnał pomiarowy z powrotem do dalmierza. W zależności od długości mierzonego odcinka, najczęściej wykorzystuje się reflektory złożone z 1, 3 lub 9 pryzmatów. Najnowsza generacja tachimetrów elektronicznych to instrumenty wyposażone w dalmierz, który na określonym dystansie (przeważnie do ok. 200m.) może dokonać pomiaru odległości poprzez odbicie fali pomiarowej od dowolnej powierzchni (np. ściany budynku)- nie wymaga więc ustawienia pryzmatu w punkcie celu. Pomiar bez lustra pozwala więc na zdejmowanie punktów niedostępnych, zaś jego zasięg zależy od właściwości dalmierza i od struktury oraz jasności powierzchni odbijającej sygnał.
Prędkość rozchodzenia się fal elektromagnetycznych w atmosferze, decydująca o prawidłowości określenia czasu t nie jest stała, lecz zależy od długości λ fali nośnej sygnału i stanowi funkcję temperatury, ciśnienia i wilgotności powietrza. Podczas pracy mierzymy parametry meteorologiczne, a w szczególności temperaturę powietrza i ciśnienie. Na tej podstawie wprowadzamy poprawkę Ka obliczoną z odpowiednich wzorów lub nomogramów zamieszczonych w instrukcji obsługi instrumentu.
W zależności od zestawienia podstawowych elementów tachimetru, a szczególnie od sposobu połączenia teodolitu z dalmierzem elektrooptycznym rozróżniamy: tachimetry elektroniczne modularne i zintegrowane. Modularny stanowi przyrząd złożony z dwóch podstawowych modułów (nasadki dalmierczej i teodolitu optycznego lub elektronicznego), łatwy do połączenia, a następnie w razie potrzeby do rozdzielania. Dodatkowe zespół ten można wyposażyć w port do łączenia zestawu z komputerem lub rejestratorem zewnętrznym dokonującym elektronicznego zapisu wyników pomiaru. Nasadka może być zamontowana na lunecie teodolitu lub na jej wspornikach albo pracować samodzielnie jako dalmierz- nie stanowią wtedy tachimetru.
Tachimetr zintegrowany jest połączeniem części kątomierczej i dalmierczej zmontowanych fabrycznie. Tachimetr ten składa się z: teodolitu elektronicznego, dalmierza elektrooptycznego, klawiatury numerycznej lub α-numerycznej, rejestratora oraz mikroprocesora tworzących razem we wspólnej obudowie jednolity system pomiarowy.
Mikroprocesor, sterujący pracą instrumentu, rozwiązuje zagadnienie wieloznaczności elektromagnetycznego pomiaru odległości, dokonuje obliczeń poprawek na nachylenie, poziom morza, atmosferycznych, instrumentalnych oraz na krzywiznę Ziemi i refrakcję do wyników pomiarów kątów i odległości, które są wyświetlane na ekranie wyświetlacza ciekłokrystalicznego.
PODZIAŁ MAP, podstawy matematyczne.
Mapa jest jednym z najdogodniejszych źródeł badania powierzchni Ziemi , bo umożliwia jednoczesny przegląd przestrzennego rozmieszczenia przedmiotów i zjawisk dowolnego wycinka jej obszaru. Stanowi podstawę do wszelkiego rodzaju planowania, organizacji i przedstawienia wyników gospodarki narodowej (rolnej, leśnej, budowlanej, komunikacyjnej, przemysłowej), a także do badań naukowych oraz działalności społecznej i kulturalnej.
Klasyfikacja map:
Przyjmując treść jako główną cechę klasyfikacji map, dzielimy je na:
- ogólnogeograficzne,
- tematyczne.
Treścią mapy ogólnogeograficznej są wszystkie główne elementy krajobrazu powierzchni Ziemi jak hydrografia, rzeźba terenu, osiedla, drogi, lasy, użytki rolne.
Treścią map tematycznych jest jeden lub kilka wybranych elementów treści mapy ogólnogeograficznej bądź określone zagadnienia, zjawiska i procesy społeczno-gospodarcze lub przyrodnicze. Zależnie od skali dzielą się na:
- mapy topograficzne wielkoskalowe (w skalach do 1: 10 000 włącznie),
- mapy topograficzne średnioskalowe (w skalach od 1: 10 000 do 1: 50 000),
- mapy topograficzne małoskalowe (w skalach od 1: 50 000 do 1: 500 000).
Mapy topograficzne wielkoskalowe są wynikiem bezpośrednich pomiarów w terenie. Prawie wszystkie szczegóły terenowe są przedstawione w skali zgodnie ze swymi wymiarami terenowymi.
Mapy topograficzne średnio- i małoskalowe są pochodnymi od map uprzednio wymienionych. Otrzymuje się je w drodze generalizacji map topograficznych wielkoskalowych.
Ogólna klasyfikacja map (dla celów gospodarczych):
mapy geograficzne
mapy ogólnogeograficzne mapy tematyczne
małoskalowe wielkoskalowe społeczno-gospodarcze przyrodnicze
średnioskalowe
Podstawy matematyczne map:
Mapy topograficzne wielko- i średnioskalowe opracowuje się w państwowym układzie współrzędnych „1965”. Układ ten nie jest układem jednolitym. Podstawa matematycznego opracowania map jest:
- układ współrzędnych prostokątnych płaskich w odwzorowaniu płaszczyznowym ukośnym wiernokątnym, przyjętym dla czterech fragmentów Polski. Są tzw. 4 strefy odwzorowawcze:
I strefa pierwsza (płd. - wsch. część Polski)
II strefa druga (płn. - wsch. część Polski)
III strefa trzecia (płn. - zach. część Polski)
IV strefa czwarta (płd. - zach. część Polski)
- układ współrzędnych prostokątnych płaskich w odwzorowaniu Gaussa- Krügera przyjęty dla jednego fragmentu kraju obejmującego strefę częstochowsko - katowicką. Jest to tzw. piąta strefa odwzorowawcza.
Każda strefa odwzorowawcza ma własny początek układu współrzędnych. W czterech strefach zniekształcenia rozkładają się wzdłuż okręgów koncentrycznych do punktu głównego i mają wartości dodatnie i ujemne od 0 do 25 cm na 1 km. W piątej strefie odwzorowawczej zniekształcenia zerowe występują wzdłuż dwóch południków. Między tymi południkami zniekształcenia przyjmują wartości ujemne, na zewnątrz dodatnie.
WYKŁAD 19
W każdej strefie definiuje się współrzędne prostokątne (X,Y) i główne linie siatki współrzędnych w odstępach: Δx=40 km i Δy=64 km, które dzielą każdą strefę na tzw. sekcje podziałowe. Sekcje podziałowe znajdujące się w jednym poziomie tworzą pasy, a w jednym pionie- słupy.
Pasy i słupy są oznaczone kolejnymi cyframi 0-9 (przy czym numeracja odbywa się z północy na południe i z zachodu na wschód). Każda sekcja pomiarowa ma oznaczenie 3-cyfrowe (nr: strefy, pasa, słupa).
Sekcja map topograficznych w skalach 1: 50 000, 1: 25 000, 1: 10 000 i 1: 5 000 powstają w wyniku czterostopniowego kolejnego podziału sekcji podziałowej na cztery części.
SEKCJA PODZIAŁOWA
rys. nr 9a
Godła map topograficznych składają się z godła sekcji podziałowej np. 343 (oznaczona sekcja znajduje się w 3 strefie, na przecięciu 4 pasa i 3 słupa), za którym po kropce umieszcza się grupy trzycyfrowych liczb oznaczających numery arkusza map w odpowiednich skalach. Pełne godła arkuszy map topograficznych wielko- i średnioskalowych na przykładzie sekcji podzielonych 343 podaje tabela.
Mapa zasadnicza: jest to źródłowe opracowanie kartograficzne zawierające informacje o przestrzennym rozmieszczeniu obiektów ogólnogeograficznych oraz elementów ewidencji gruntów i uzbrojenia terenu.
Podstawa podziału na sekcje mapy zasadniczej w skalach 1: 5 000, 1: 2 000, 1: 1 000, 1: 500 jest sekcja wielkoskalowa mapy topograficznej w skali 1: 10 000. Sekcja podziałowa mapy w skali 1: 10 000 dzieli się na: 4 sekcje mapy zasadniczej w skali 1: 5 000, 25 sekcji mapy zasadniczej w skali 1: 2 000, 100 sekcji mapy zasadniczej w skali 1: 1 000, 400 sekcji mapy zasadniczej w skali 1: 500. Rozmiary sekcji i zasięg terytorialny dla odpowiednich skal mapy zasadniczej przedstawia tabela 3,3 na rys. 9b.
Godło arkusza map zasadniczych tworzy się przez dodanie do godła mapy topograficznej w skali 1: 10 000 kolejnych numerów odpowiednich arkuszy mapy zasadniczej w danej skali wynikających z ustalonego podziału.
1: 50 000 343.2
1: 25 000 343.23
1: 10 000 343.231
1: 5 000 343.231.4
1: 2 000 343.231.18
1: 1 000 343.231.182
1: 500 343.231.182.3
SKALA MAPY ZASADNICZEJ
Mapę zasadniczą sporządza się w skalach: 1: 500, 1: 1 000, 1: 2 000, 1: 5 000 na określonym obszarze prowadzona jest jedna mapa zasadnicza w odpowiednio dobranej skali. Skalę mapy dobiera się w zależności od:
- stopnia zagęszczenia terenu (szczegółowymi sytuacjami ogólnymi stanowiącymi treść mapy),
- stopnia zinwentaryzowania terenu w uzbrojenie podziemne,
- planowanych inwestycji.
Mapy zasadnicze zakłada się w skalach 1: 500 (tereny śródmiejskie o dużym stopniu zurbanizowania), 1: 1 000 (tereny małych miast, tereny peryferyjne dużych miast, aglomeracje miejskie i przemysłowe oraz tereny osiedlowe, wsie będące siedzibami gmin), 1: 2 000 (powstałe, zwarte tereny osiedlowe, wiejskie obszary rolne i leśne na terenach miast), 1: 5 000 (tereny o rozproszonej zabudowie wiejskiej, grunty rolne i leśne na obszarach gminnych. Obszar terenu opracowywany w danej skali ustala się po granicach naturalnych lub granicach władania).
TREŚĆ MAPY ZASADNICZEJ
Na treść mapy zasadniczej składają się:
- punkty osnowy geodezyjnej poziomej i wysokościowej
-granice państwa, podziału administracyjnego, obrębów ewidencyjnych, działek oraz użytków rolnych
- ogrodzenia trwałe
- budowle i budynki
- urządzenia techniczne nadziemnego i podziemnego uzbrojenia terenu
- drogi, koleje, urządzenia towarzyszące
- rzeźba terenu, sztucznie ukształtowane formy terenu
- rodzaje użytków gruntowych i pokrycie szatą roślinną
- tereny rekreacji i sportu
- pomniki, cmentarze, figury przydrożne
- opisy informacyjne związane z treścią mapy
- kontury klasyfikacji gruntów i ich oznaczenia oraz numery działek zgodnie z operatem ewidencji gruntów.
Szczegółowy zapis treści określa instrukcja K-1.
DOKŁADNOŚĆ PIERWORYSU MAPY ZASADNICZEJ
Dokładność graficzna pierworysu mapy zależy od:
- dokładności pomiarów poszczególnych grup szczegółów sytuacyjnych stanowiących treść mapy
- skali mapy.
Przyjmuje się że:
- błąd kartowania osnowy na pierworysie mapy zasadniczej nie maże przekroczyć 0,1 mm
- średni błąd położenia punktów sytuacyjnych I grupy dokładnościowej nie może przekroczyć 0,3 mm w skali mapy względem najbliższych punktów osnowy geodezyjnej
- średni błąd położenia punktów pozostałych elementów treści mapy nie może przekroczyć 0,6 mm.
METRYKA MAPY ZASADNICZEJ
Każdy arkusz mapy zasadniczej powinien mieć założoną metrykę, która jest podstawowym dokumentem obrazującym przebieg opracowania danego arkusza. Celem metryki mapy jest podanie informacji źródłowych o cechach założonej mapy oraz stopniu jej aktualizacji.
Metryka mapy powinna zawierać dane;
- tytuł, godło arkusza, skalę, numer ewidencyjny
- układ współrzędnych, poziom odniesienia
- metody opracowania mapy
- data założenia mapy
- określenie obszaru opracowania
- wykonawcę mapy
- wpisy dotyczące aktualizacji mapy
NAKŁADKI TEMATYCZNE
Mapa zasadnicza zawiera podstawy zbioru informacji o terenie, na który składają się podzbiory przedstawiające informacje dotyczące np. sytuacji, rzeźby, ewidencji gruntów lub uzbrojenia terenu. W związku z tym dla obszarów o dużym stopniu zainwestowania i znacznej częstotliwości zachodzących zmian zaleca się prowadzić mapę zasadniczą w systemie odpowiednio dobranych nakładek tematycznych, oznaczonych następująco;
W- nakładka rzeźby terenu
U- nakładka uzbrojenia podziemnego terenu
R- nakładka realizacyjna
T- nakładka specjalna
Nakładką tematyczną mapy zasadniczej (zbioru podstawowego) jest graficzny obraz jednego lub kilku podzbiorów przedstawiony na oddzielnym arkuszu folii kreślarskiej, zamkniętych w tych samych ramkach sekcyjnych co arkusz mapy.
Mapa ewidencyjna w swej treści zawiera;
- punkty i numery osnowy geodezyjnej
- granice podziałów administracyjnych wraz z opisem
- granice i opisy działek
- granice i oznaczenia użytków gruntowych i klas bonitacyjnych
- niektóre punkty graniczne
- ważniejsze budowle i budynki (z numerami i symbolami)
OPRACOWANIE
Mapy topograficzne dla celów gospodarczych opracowuje się w skalach 1: 10 000, 1: 25 000, 1: 50 000, 1: 100 000, 1: 200 000, 1; 500 000 dla obszaru całego kraju oraz w skali 1: 5 000 dla obszaru wielkich miast lub innych stref intensywnie zagospodarowanych. Mapy topograficzne są mapami ogólnogeograficznymi o treści dostosowanej do potrzeb gospodarczych.
Mapy topograficzne przeznaczone są do:
Na mapach topograficznych przedstawia się:
Dokładność przedstawiania przedmiotów sytuacyjnych na mapach topograficznych powinna odpowiadać następującym warunkom:
MAPY TEMATYCZNE
Mapy tematyczne są opracowaniami kartograficznymi eksponującymi 1 lub kilka wybranych elementów, treści ogólnogeograficznej bądź określone zagadnienia społeczno-gospodarcze lub przyrodnicze. Mapy te stanowią zbiory map w skalach od 1: 250 do 1: 500 000.
Mapy tematyczne ze względu na treść dzielą się na dwa zespoły:
Zespoły map społeczno-gospodarczych dzieli się na dwie grupy:
Zespoły map przyrodniczych dzieli się na dwie grupy:
Rys.10
NOWE TECHNOLOGIE SPORZADZANIA MAP
Wprowadzenie techniki komputerowej do procesów sporządzania map wyeliminowało potrzebę tradycyjnego opracowywania pierworysu. Powstanie nowych instrumentów i przyrządów pomiarowych, obliczeniowych i kreślących o automatycznym działaniu umożliwiło wprowadzenie numerycznych metod i technologii, które pozwalają na uzyskanie mapy numerycznej
Podstawa jej opracowania jest baza danych utworzona ze zbioru współrzędnych punktów osnowy geodezyjnej oraz punktów granicznych obiektów powierzchniowych będących treścią mapy. w procesie opracowywania mapy wykorzystane są różnorodne informacje źródłowe występujące w postaci α-numerycznej lub graficznej. Są to dane z pomiarów bezpośrednich, fotogrametrycznych, dane uzyskane droga digitalizacji i istniejących map i zawarte w dokumentacji opracowań geodezyjnych.
Mapą numeryczna nazywa się zbiór danych numerycznych, który po zastosowaniu ściśle określonych algorytmów i odpowiednich środków technicznych może być przetworzony do graficznej postaci mapy określonego obszaru .
Mapa numeryczna ma szereg zalet , a mianowicie :
Przy tworzeniu mapy numerycznej wykorzystuje się nowoczesne techniki pozyskiwania danych tj. :
Kolejnym etapem zautomatyzowanego opracowania mapy jest wspomagana komputerowo redakcja techniczna i numeryczna mapy . Ostatnim procesem technologii jest automatyczne kreślenie czystorysów na podstawie numerycznej postaci mapy za pomocą precyzyjnych ploterów , czyli automatów kreślących .
Pełne wykorzystanie możliwości , nowoczesnej techniki następuje w momencie zastosowania ciągłej linii technologicznej łączącej prace terenowe i kameralne w jedną całość . Prowadzi to do powstania zintegrowanych systemów umożliwiających prawie pełną automatyzację prac geodezyjnych .
Rys. 11 ciąg technologiczny opracowania mapy numerycznej
WYKŁAD 20 23.05.2002.
Pomiary uzupełniające i aktualizacja map.
„Pomiar uzupełniający jest to zespół czynności technicznych pozwalających na dostosowanie dokumentów geodezyjno-kartograficznych do ich zgodności z terenem w zakresie ustalonej dla nich treści.” - instrukcja G-4 rozdział I paragraf 2.
Pomiary te mogą dotyczyć zarówno sytuacyjnych jak i wysokościowych elementów treści mapy, w związku z czym pomiary uzupełniające dzielimy na sytuacyjne i wysokościowe. Potrzeba wykonywania pomiarów uzupełniających wynika z konieczności aktualizowania istniejących map, a w szczególności mapy zasadniczej. Inną przyczyną wykonywania tych pomiarów jest przystosowanie posiadanych map do konkretnych celów gospodarczych. W związku z wykonywaniem map w oparciu o zdjęcia lotnicze zachodzi także konieczność domierzania tych elementów, które nie odfotografowały się na zdjęciu lub zostały odwzorowane z niewystarczającą dokładnością, np. granice własności, elementy uzbrojenia terenu itp. Pomiary związane z uczytelnianiem i uzupełnianiem treści zdjęć lotniczych zaliczamy również do pomiarów uzupełniających. Zasady aktualizacji podają wytyczne techniczne K-1.2 („Mapa zasadnicza- aktualizacja i modernizacja”). Uzupełniające pomiary dla potrzeb studialnych i projektowych reguluje instrukcja G-3 („Geodezyjna obsługa inwestycji”). Aktualizacja polega na pomierzeniu w terenie i naniesieniu na pierworys tych elementów, które składają się na treść danej mapy, a których nie zawiera mapa pierwotna.
Rozróżniamy aktualizację okresową wykonywaną w określonych odstępach czasu i aktualizację bieżącą w ramach której wprowadza się na mapę elementy treści tuż po ich powstaniu. Aktualizację okresową obejmującą wszystkie elementy treści mapy zasadniczej wykonuje się w oparciu o wyniki pomiarów uzupełniających i istniejącą dokumentację geodezyjno - kartograficzną i branżową.
Aktualizację bieżącą prowadzi się w oparciu o pomiary inwentaryzacyjne nowo powstałych obiektów budowlanych tzw. inwentaryzacja powykonawcza.
Aktualizacja okresowa uzupełnia wyniki aktualizacji bieżącej ujawniając zmiany nie wykryte podczas tej ostatniej czyli bieżącej. W procesie aktualizacji bieżącej mapy zasadniczej prowadzona jest tzw. mapa dyżurna będąca kopią mapy, na której rejestrowane są zmiany elementów treści. Szczegółowe zasady prowadzenia mapy dyżurnej podają wytyczne techniczne K-1.2.
UZUPEŁNIAJĄCE POMIARY SYTUACYJNE.
Zadaniem uzupełniających pomiarów sytuacyjnych jest dostosowanie map i innych dokumentów geodezyjno-kartograficznych do ich zgodności z terenem w zakresie sytuacyjnych szczegółów terenowych. Pomiary te wykonywane są najczęściej podczas aktualizowania mapy zasadniczej i map topograficznych, uczytelnienia zdjęć lotniczych lub dla przystosowywania map do określonych celów . Osnowę pomiarową dla sytuacyjnych pomiarów uzupełniających zakłada się w taki sposób , aby możliwe było zdjęcie wszystkich szczegółów potrzebnych do uzupełnienia map lub dokumentów . Zalecaną w instrukcji G-4 metodą zdjęcia jest pomiar biegunowy z pośrednim określeniem odległości . W szczególności do zagęszczenia osnowy stosuje się następujące konstrukcje lub metody :
Niezależnie od skali mapy zasadniczej błąd położenia wyznaczonych punktów osnowy pomiarowej nie powinien przekraczać 0,20 m . Zasady pomiaru tej osnowy i wymagane efekty dokładnościowe zawiera instrukcja G-4 . Osnowa pomiarowa powinna być nawiązana do punktu sieci poziomej minimum III klasy . Na bokach sieci osnowy szczegółowej można zakładać punkty posiłkowe stanowiące początek lub koniec ciągu sytuacyjnego lub linii pomiarowej . Po pomierzeniu osnowy , na której będzie oparty pomiar uzupełniający należy sporządzić jej szkic oraz wykazy miar i współrzędnych . W trakcie wykonywania pomiarów uzupełniających wymagane jest przestrzeganie zasad przewidzianych dla nowych pomiarów w instrukcji G-4 . Szkice polowe pomiarów uzupełniających sporządza się na odrębnych formularzach lub odbitkach szkiców pierwotnych , w kopiach mapy zasadniczej lub odbitkach zdjęć lotniczych . Rysunek nowych elementów treści mapy przedstawia się na tych szkicach kolorem czerwonym . Dotyczy to zarówno domierzanych szczegółów jak i nowych punktów osnowy pomiarowej , a także ich numerów i nowych linii konstrukcyjnych ( linii pomiarowych , przedłużeń , linii domiarów ) . Na czerwono podaje się także miary do nowych elementów i numerację pikiet na tych elementach . Również tym samym kolorem skreśla się na odbitkach elementy aktualnie nie istniejące w terenie . Nowe szkice wykonuje się w całości kolorem czarnym , choć dopuszcza się także wykonanie ich na czerwono . Uzupełniające pomiary sytuacyjne mogą być wykonywane również metodami fotogrametrycznymi ( wytyczne techniczne K-1.2 ) .
UZUPEŁNIAJĄCE POMIARY WYSOKOŚCIOWE
Wysokościowy pomiar uzupełniający jest to zespół czynności technicznych , którego celem jest dostosowanie dokumentów geodezyjno - kartograficznych do ich zgodności z terenem w zakresie ukształtowania terenu oraz określenia wysokości tych elementów , które powstały w terenie po założeniu mapy zasadniczej a zgodnie z wymogami instrukcji K-1 powinny być określone wysokościowo . Przyczynami zmian ukształtowania pionowego terenu mogą być siły przyrody ( np. erozja rzeczna ) lub działalność człowieka polegająca na formowaniu powierzchni Ziemi podczas działalności inwestycyjnej oraz w rejonach szkód górniczych . Wysokościowe pomiary uzupełniające mogą być również wykonywane w celu zaktualizowania sporządzonej wcześniej dokumentacji technicznej lub projektowej . Omawiane pomiary wykonuje się z reguły metodami bezpośrednimi przeważnie za pomocą punktów rozproszonych . W uzasadnionych przypadkach dla większych obszarów można wykorzystywać metody fotogrametryczne .
Wymogi dokładności dotyczące wysokości charakterystycznych punktów terenowych względem punktów wysokościowej osnowy geodezyjnej wynoszą :
Średni błąd określenia wysokości charakterystycznych punktów rzeźby terenu nie powinien przekraczać wielkości
cięcia warstwicowego przewidywanego dla danej mapy
Pomiar uzupełniający musi być nawiązany do istniejącej osnowy wysokościowej, a w przypadku braku blisko położonych punktów pomiar ten wykonuje się w oparciu o zagęszczenie osnowy wysokościowej zgodnie z G-4. Podczas zagęszczania osnowy nie należy odtwarzać zniszczonych znaków, lecz założyć nowe w odpowiednio dobranych miejscach. Technika i dokładność dokonania wysokościowego pomiaru uzupełniającego są analogiczne jak przy wykonywaniu nowych pomiarów (G-4, część III).
Rejestrację wyników prowadzi się na szkicach i dziennikach polowych sporządzonych na odpowiednich formularzach. Szkice mogą być także prowadzone na odbitkach aktualnych map zasadniczych lub zdjęć lotniczych.
MODERNIZACJA MAPY ZASADNICZEJ W ZAKRESIE RZEŹBY TERENU.
Modernizacja polega na doprowadzeniu dotychczasowej treści i formy istniejącej mapy zasadniczej do treści i formy zgodnej z aktualnymi przepisami. W zakres modernizacji mapy wchodzi także jej aktualizacja, która ma na celu doprowadzenie modernizowanej mapy do zgodności z terenem. Przy modernizacji potrzeba wprowadzania zmian elementów wysokościowych treści mapy może wynikać z następujących przyczyn:
K-1.
W pierwszym przypadku konieczne jest przeliczenie wysokości na obowiązujący układ państwowy, w drugim ponowna interpolacja i wykreślenie warstwic. W przypadku modernizacji mapy zasadniczej w skalach 1: 500, 1: 1 000, gdy treść mapy dotychczasowej nie obejmuje rzeźby terenu i nie istnieją żadne materiały kartograficzne lub geodezyjne, z których można byłoby wnieść te elementy na pierworys z dokładnością wymaganą w K-1 należy wykonać nowy pomiar wysokościowy i na jego podstawie opracować na pierworysie mapy elementy wysokościowe.
W przypadku modernizacji mapy zasadniczej terenów rolnych i leśnych w skalach 1: 2 000, 1: 5 000 dopuszcza się opracowanie rzeźby na podstawie map topograficznych. Jeśli mapa dotychczasowa wykonana jest w państwowym układzie współrzędnych, wysokości w kroju sekcyjnym zgodnym z instrukcjami , wówczas należy dla niej założyć metrykę mapy wg zasad podanych w wytycznych technicznych K-1.2.
6
elipsoida
P
L
B
I
II
III
IV
V
Mapa zniekształceń odwzorowawczych liniowych układu "1965"
0
1
2
1
2
3
3
4
4
5
5
6
6
343
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
D
C
P
Wcięcie kombinowane polega na tym, że celujemy instrument z punktów danych do punktów szukanych i odwrotnie. Wcięcia kombinowane stosuje się do wyznaczania pojedynczych punktów oraz do wyznaczania kilku punktów sąsiadujących ze sobą.
A
B
Wcięcie wstecz polega na tym, że instrument ustawiamy na punkcie szukanym zamierzając kierunki do punktów danych.
P
D
C
B
A
Wcięcie kątowe w przód polega na tym, że instrument ustawiamy na punktach danych i celujemy do punktów szukanych.
P
D
C
B
A
6
5
4
3
2
1
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
A
B
P
C
A
B
P
B
A
![]()
![]()
![]()
1
2
3
4
5
IV sektor I sektor
dik
i
k
L
P
C
a
y
x
A
α3
α18
α17
α16
α15
α14
α13
α12
α11
α10
α9
α8
α7
α6
α5
α4
α2
α1
F
B
C
D
E
G
-d2-
-d1-
B
P
A
C
-d-
β
B
P
-d1-
-d2-
F
E
α
β
B
A
H
G
P
-d2-
-d1-
B
A
H
G
P
-b-
ϕ
P
y
x
y
-a-
-b-
-c-
βB
βA
P
x
h=y
a=x
-b2-
-b1-
-b-
B
A
P
P2 W2
P1 W1
st.
„n”
st.
„n-1”
HA
dAB
ΔhAB
A
poziom odniesienia
HB
B
α
l
i
A
w
α2
α1
B
-d-
C
S
poziom
odniesienia
d
A
C
w
α2
h
α3
α1
B
-d-
S
poziom odniesienia
st.
Krzywa podst.
(zerowa)
Kontrolna
k=200
![]()
Stała
k=100
![]()
D
ε/2
ε
b/2
b
A
B
ε
b
B
-D-
A
p
p
p
g
s
d
![]()
klin odchylający
O
O'
b
ε
A
C
E
D
P1
P2
P3
![]()
![]()
1
2
3
4
I
6
B
B'
A
Na dużych odległościach.
5
L
A
B
e1
e2
- Sm -
S
Q1
Q2
ϕ
- a -
- h -
x
y
P
P'
α
β
x
y
z
d'
d
Krzywe widoczne na łacie
punkt celowania
+10
-10
KP
II poł lunety
KL
I poł lunety
Służą do przewyż
Wyszukiwarka