2. ZAPAS WODY POD STĘPKĄ STATKU
(SKŁADOWA STATYCZNA)
REZERWA WODY POD STĘPKĄ
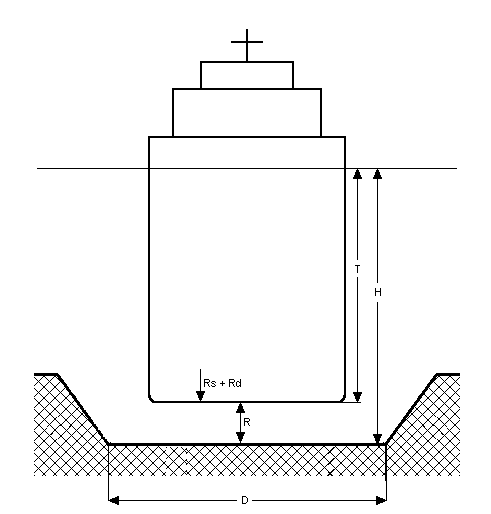
Warunek bezpiecznego manewru:
H ≥ T + R
Gdzie: H - głębokość akwenu
T - zanurzenie statku
R - rezerwa wody pod stępką
Rezerwa wody pod stępką:
R = Rs + Rd + δR
Gdzie: Rs - rezerwa statyczna
Rd - rezerwa dynamiczna
δR - błąd oceny poprawek
10.11.99 - II
Rezerwa statyczna Rs
Nie zależy od ruchu statku i jest stała dla danego akwenu.

R1 - rezerwa wody na błąd sondaży (zależność od głębokości akwenu)
R2 - rezerwa nawigacyjna (nieciągłość sondaży)
R3 - rezerwa na zamulanie
R4 - rezerwa na błąd określania wysokości pływu (tzw. okno czasowe)
R5 - rezerwa na błąd określonego stanu wody (wahania poziomu w stosunku do zera mapy)
R6 - rezerwa na błąd określonego zanurzenia statku
R7 - rezerwa na błąd oceny przechyłu statku
ELEMENTY SKŁADOWE REZERWY
DYNAMICZNEJ
Rd = R8 + R9
R8 - rezerwa na osiadanie statku w ruchu, zależna od głębokości akwenu, prędkości statku i jego zanurzenia,
R9 - rezerwa na falowanie morza (parametry falowania).
R1 - rezerwa na błąd sondaży
Rezerwa na błąd sondaży (R1)
Głębokość akwenu (H) [m] |
Rezerwa wody (R1) [m] |
Do 4 4 - 10 10 - 20 20 - 100 |
0.10 0.15 0.20 0.01 H |
R2 - nawigacyjna rezerwa wody
Niepełna znajomość i czystość dna
Błędów interpolacji poszczególnymi sondowaniami
Skutki ewentualnego zetknięcia się kadłuba z dnem (rodzaj dna)
Rodzaj akwenu i sondaży |
Rodzaj dna |
Rezerwa wody (R2) [m] |
1. Trałowany tor wodny |
Nie zależy |
0.0 |
2. Tor wodny i akweny portowe. Często wykonywane sondaże ciągłe. |
Miękkie Twarde |
0.2 0.3 |
3. Tory wodne i akweny portowe. Pozostałe przypadki sondaży |
Miękkie Twarde |
0.3 0.4 |
4. Podejścia do portów (rezerwa zależnie od gęstości sondaży) |
Miękkie Twarde |
0.5 - 0.8 0.7 - 1.0 |
R3 - rezerwa na zamulanie
Rodzaj akwenu
Częstotliwość wykonania sondaży
R3 = 0.1 ÷ 0.3 m
(Wartości większe przy ujściach rzek)
Bezpieczne dla akwenu:
Kadłub statku nie może ulec uszkodzeniu nawet przy zerowej rezerwie wody
Manewrowość statku nie może zostać wydatnie ograniczona.
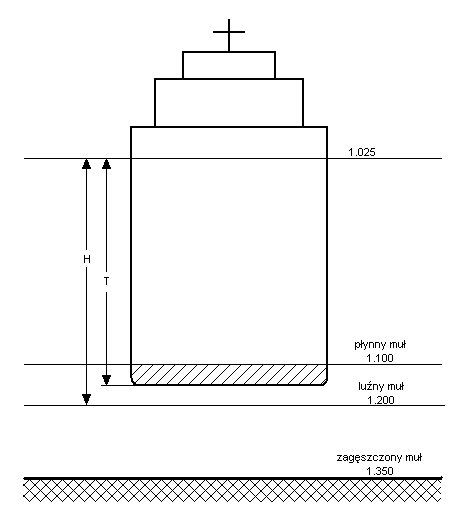
Jeśli gęstość mułu ≤ 1.200 t/m3
R4 - rezerwa wody na błąd określania pływu
R4 = 0.1 m dla akwenów a pływami
R4 = 0.0 m dla akwenów bezpływowych
R5 - rezerwa wody na błąd określania stanu wody.
Wahania poziomu wody w stosunku do zera wywołane są określonymi warunkami hydrometeorologicznymi. Zazwyczaj długotrwałe i silne wiatry wiejące w stronę lądu oraz stany powodziowe na rzekach podnoszą poziom wody, natomiast silne wiatry wiejące od lądu oraz niskie stany wody na rzekach obniżają go.
Poziomy wody mogą różnic się w stosunku do zera mapy w zakresie od -2,0 m do +2,0 m, co uzależnione jest od akwenu pływania i istniejących warunków hydrometeorologicznych. Na akwenach, na których istnieją duże wahania poziomu wód w stosunku do zera mapy, należy każdorazowo zasięgnąć informacji o aktualnym poziomie wody i perspektywach jego zmiany.
Rezerwa na błąd określania stanu wody przyjmowana jest następująco:
akweny o małych wahaniach poziomu wody R5= 0,1 m;
akweny o dużych wahaniach poziomu wody dla krótkoterminowej prognozy (do 4 godz.) R5=0,2 m
akweny o dużych wahaniach poziomu wody dla długoterminowej prognozy (1 doba i więcej) R5= 0,3-0,6 m, przyjmowane w zależności od maksymalnych skoków wahań poziomu wody na danym akwenie i pory roku.
10.11.-
Pz - poziom zerowy morza
Pz = Amst
Amst - zero amsterdamskie wodowskaz o 16,2 cm wyżej od poziomu Morza Północnego (obserwacje 1701÷1871 i na stacji meteo w Amsterdamie)
Pz - NN55 (Normal Null)
NN55 - odpowiada zeru głównego reperu dla obszaru Polski (Ratusz Miejski w Toruniu)
Kron - zero kronsztadzkie
HKron = HAmst + 0.08 [m]
WWW - najwyższy dotychczas zaobserwowany poziom morza, nazywany „bezwzględnie najwyższym poziomem morza”
WW - najwyższy poziom morza zaobserwowany w określonym czasie, nazywany „najwyższym poziomem morza”
SWW - poziom średni z najwyższych rocznych poziomów morza zaobserwowanych w określonym czasie, nazywany „wysokim poziomem morza”
SW - poziom średni ze wszystkich zaobserwowanych poziomów morza w określonym czasie, nazywany „średnim poziomem morza”,
SNW - poziom średni z najniższych rocznych poziomów morza zaobserwowanych w określonym czasie , nazywany „niskim poziomem morza”,
NW - najniższy poziom morza zaobserwowany w określonym czasie, nazywany „najniższym poziomem morza”,
NNW - najniższy dotychczas zaobserwowany poziom morza, nazywany „bezwzględnie najniższym poziomem morza”
R6 - rezerwa na błąd określania zanurzenia statku (KALKULACJA)
Przyczyny zmian zanurzenia :
zmiany ciężaru spowodowane zużyciem paliwa i zapasów
przeprowadzonych operacji balastowych
zmiany zasolenia wody
odkształcenia kadłuba
R6= 0.1÷0.3
R7 - rezerwa na przechył statku
błąd trudności utrzymania statku w pionie
przechyły związane ze zmianami kursu
Błąd utrzymania w pionie ≤ 1˚
Przechył przy zmianie kursu
vs ≤ 5 w błąd = 0˚
vs ~ 20 w błąd ok. 5˚
R7 = 0.00875 • B • α [ m ]
Gdzie : B - szerokość statku [m]
α - kąt przechyłu
(suma błędu pionu i przechyłu) [˚]
R9 - rezerwa na falowanie morza
długośc i szerokość statku, prędkość
wysokość i długość fali
kąt kursowy fali
R9 = k · h [m]
k - współczynnik 0,33 ÷ 0,66
h - wysokość fali [m]
k → 0,66 dla B/2 <Lfali/2 i kąt fali 90º , 270º
Przy statku w ruchu
R9 = 1.125 dla v ≤ 10 w
R9 = 1.25 dla v > 10 w
1
Wyszukiwarka