1
4
. OSCYLATOR HARMONICZNY PROSTY,
TŁUMIONY I WYMUSZONY. REZONANS.
1. PODSTAWOWE POJĘCIA
Ruch (drgania) harmoniczny (perjondyczny) – ruch powtarzający się w regularnych odstępach
czasu. Może być tłumiony, gdy jakaś zewnętrzna siła tłumi ruch powodując stopniowe zmniejszanie
się jego amplitudy lub też wymuszony, gdy zewnętrzna siła wymusza drgania.
Okres drgań T to czas trwania jednego pełnego cyklu (drgnięcia) – najkrótszy czas, po którym
ruch zaczyna się powtarzać.
Częstość drgań ν jest liczbą cyklów (drgań) na jednostkę czasu [Hz] – odwrotność okresu.
ν = T
-1
(1)
Amplituda – wartość bezwzględna maksymalnego wychylenia (przemieszczenia).
W ruchu harmonicznym siła działająca na punkt materialny w dowolnym jego położeniu zależy
od energii potencjalnej wg równania:
F = -dU/dx (2)
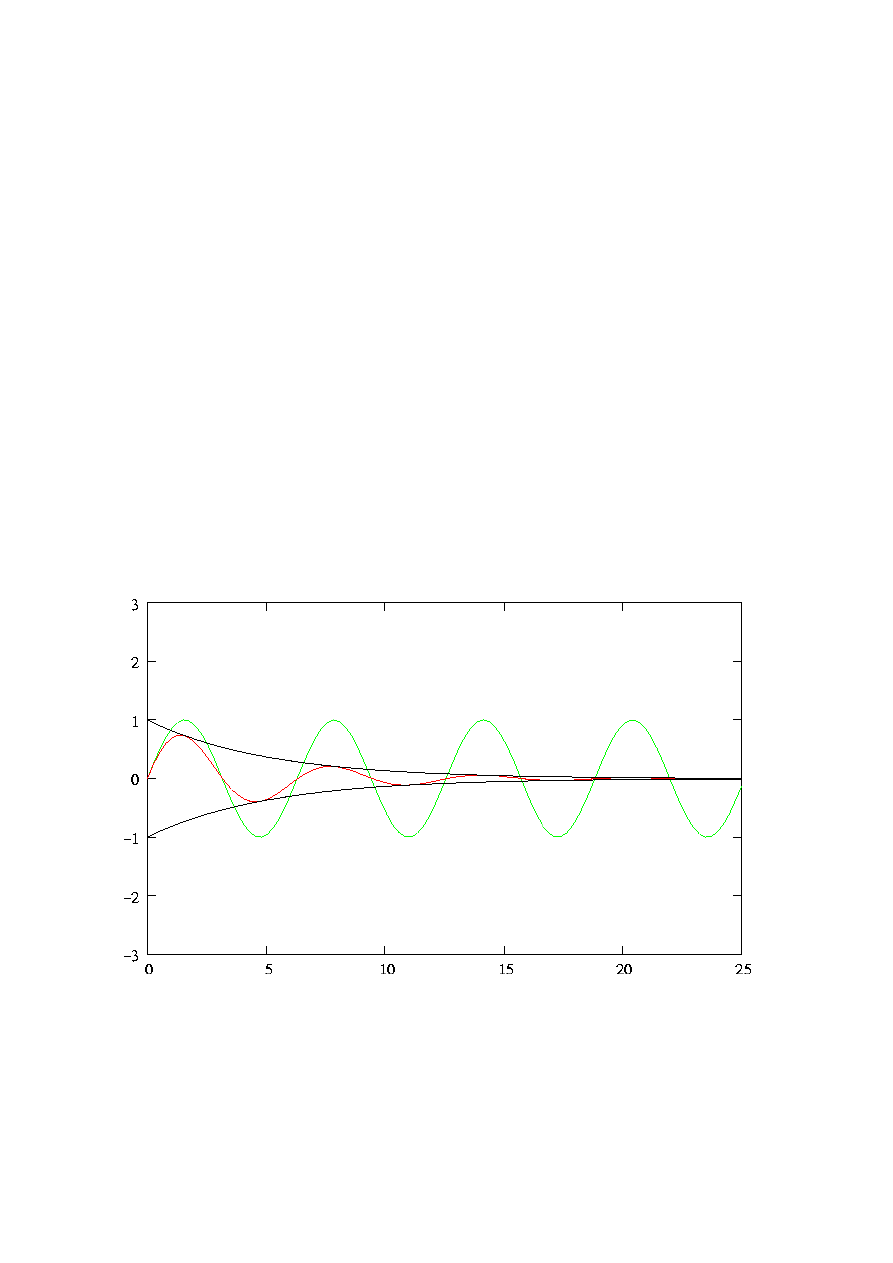
Rys. 1 – Położenie w ruchu harmonicznym nietłumionym (zielony), tłumionym (czerwony),
obwiednia ruchu tłumionego (czarny). [Wikipedia]
Skupiłem się na drganiach na przykładzie wahadeł.
Oscylacje na poziomie atomowym pewnie pojawią się w modelach atomu.
Jak nie to jeszcze to uzupełnię.
2
2. OSCYLATOR HARMONICZNY PROSTY
Energia potencjalna punktu materialnego poruszającego się w tą o z powrotem wokół punktu
równowagi można opisać wzorem:
U(x) = ½ k x
2
(3)
gdzie k to tzw. współczynnik sprężystości określający jak szybko następuje powrót do stanu
równowagi.
Natomiast siła działająca na omawiany punkt (wg równania 2):
F(x) = -k x (4)
– zależność znana jako prawo Hook’a.
Z drugiej zasady Newtona możemy wyprowadzić równanie ruchu (różniczkowe) oscylatora
harmonicznego prostego:
0
2
2
2
2
=
+
=
−
x
m
k
dt
x
d
dt
x
d
m
kx
(5)
Przekształćmy je do postaci:
x
m
k
dt
x
d
−
=
2
2
(6)
Widać teraz, że rozwiązaniem x(t) równania jest funkcja, której druga pochodna jest równa jej
samej ze stałym współczynnikiem k/m i o przeciwnym znaku. Przyjmijmy więc rozwiązanie próbne:
(
)
ϕ
ω
+
=
t
A
x
(7)
Po podwójnym zróżniczkowaniu otrzymamy:
(
)
ϕ
ω
ω
+
−
=
t
a
dt
dx
cos
2
2
2
(8)
co po przyrównaniu do wzoru 6 daje zależność:
m
k
=
2
ω
(9)
Okres ruchu
T równy jest
ω
π
/
2
, co po podstawieniu da nam:
k
m
T
π
ω
π
2
2 =
=
(10)
ω jest więc częstością kołową (kątową) o wymiarze s
-1
i jednostce rad/s.
A to oczywiście amplituda.
Czynnik
(
)
ϕ
ω
+
t
nazywamy fazą ruchu, a
ϕ
– fazą początkową.
3
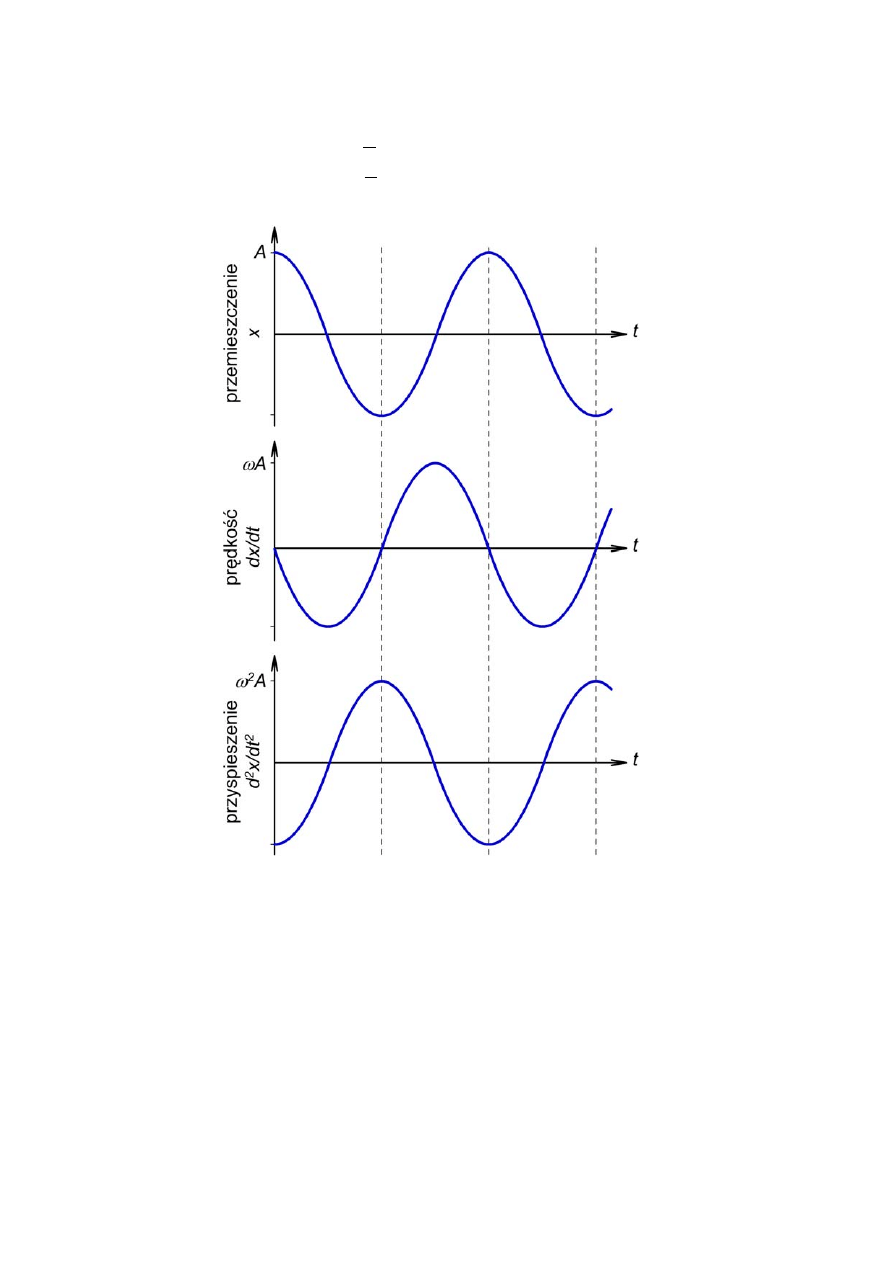
Rozważmy zależność przemieszczenia, prędkości i przyspieszenia od czasu:
(
)
(
)
(
)
ϕ
ω
ω
ϕ
ω
ω
ϕ
ω
+
−
=
=
+
−
=
=
+
=
t
A
a
t
A
v
t
a
x
dt
dv
dt
dx
cos
sin
cos
2
(11)
Rys. 2 – Zależność przemieszczenia, prędkości i przyspieszenia od czasu w ruchu harmonicznym prostym.
Na przykład przy maksymalnym wychyleniu prędkość jest zerowa, ponieważ ruch zmienia
kierunek, a przyspieszenie (tak jak siła przywracająca równowagę) osiąga wartość maksymalną, ale
jest skierowana przeciwnie do przemieszczenia.
4
3. UKŁADY FIZYCZNE Z RUCHEM HARMONICZNYM PROSTYM
Wahadło proste (matematyczne)
Ciało na nieważkiej, nierozciągliwej nici o długości l i punktowej masie m. Siła przywracająca
równowagę układu: F = -mg sinθ.
Dla małych wychyleń sinθ ≈ θ, a przemieszczenie x = lθ. Wtedy:
x
l
mg
l
x
mg
mg
F
−
=
−
=
−
=
θ
(12)
a przez analogię do wzoru 4 – okres wahadła opiszemy wzorem:
g
l
l
mg
m
k
m
T
π
π
π
2
/
2
2
=
=
=
(13)
Znając okres wahadła matematycznego możemy wyznaczyć przyspieszenie ziemskie:
2
2
4
T
l
g
π
=
Wahadło torsyjne
Krążek zawieszony w środku masy na sztywno zamocowanym drucie. Moment siły
przywracający wahadło ze skręcenia do stanu równowagi:
χθ
τ
−
=
, gdzie
χ jest stałą skręcenia
(inaczej momentem kierującym).
Równanie ruchu:
2
2
dt
d
I
dt
d
I
I
θ
ω
α
τ
=
=
=
, gdzie
α – przyspieszenie kątowe; ω – prędkość kątowa;
θ – kąt wychylenia, a I – moment bezwładności krążka.
Po podstawieniu do poprzedniego równania otrzymamy:
θ
χ
θ
θ
χθ
I
dt
d
dt
d
I
−
=
→
=
−
2
2
2
2
(14)
Widać już analogię do liniowego ruchu harmonicznego prostego. Zamiast parametrów liniowych
są kątowe, zamiast
k jest χ.
Okres drgań wyrazi sie więc wzorem:
χ
π
I
T
2
=
(15)
Wahadło fizyczne
Dowolne ciało sztywne wahające się wzdłuż pewnej osi przechodzącej przez to ciało.
Rozważmy przypadek 2D. Podobnie jak poprzednio dla małych amplitud:
χθ
θ
τ
−
=
−
= Mgd
,
gdzie d – odległość między osią obrotu a środkiem masy ciała. Równanie ruchu i okres drgań jest
podobny jak dla wahadła torsyjnego.
Oczywiście w ogólnym przypadku mamy do czynienia z ciałem o dowolnym kształcie
zawieszonym na dowolnej osi!
5
4. OSCYLATOR HARMONICZNY TŁUMIONY
Istnieje zewnętrzna siła (np. siła tarcia) zmniejszająca amplitudę drgań. Siła ta jest zależna od
prędkości drgań. Dla prostego oscylatora harmonicznego tłumionego równanie ruchu wygląda
następująco:
0
2
2
=
+
+
kx
dt
dx
b
dt
x
d
m
(16)
W porównaniu do równania oscylatora nietłumionego pojawiła się siłą tłumiąca proporcjonalna
do prędkości drgań.
Jeżeli stała
b jest mała (na tyle, że układ nie powraca od razu do stanu równowagi tylko wykonuje
kilka wahnięć), to rozwiązanie równania wygląda następująco:
(
)
ϕ
ω
+
=
−
t
Ae
x
m
bt
'
cos
2
/
(17)
gdzie
2
2
'
2
'
⎟
⎠
⎞
⎜
⎝
⎛
−
=
=
m
b
m
k
πυ
ω
Amplituda drgań maleje eksponencjalnie do zera (czerwona linia na rys. 1).
Logarytmiczny dekrement tłumienia
– logarytm naturalny ze stosunku dwóch kolejnych
wartości amplitud w odstępie czasu równym okresowi drgań. Jest to parametr bezwymiarowy
określający szybkość zaniku drgań.
(
)
bT
e
Ae
Ae
bT
T
t
b
bt
=
=
=
+
−
−
ln
ln
δ
(18)
5. OSCYLATOR HARMONICZNY WYMUSZONY, REZONANS
Oprócz siły przywracającej układ do stanu równowagi i siły wymuszającej istnieje dodatkowa
okresowa siła zewnętrzna. W prostym przypadku siłę tą można opisać wzorem:
( )
t
F
m
''
cos
ω
, gdzie F
m
jest maksymalną wartością siły, a
''
ω
jej częstością kołową. Otrzymujemy więc równanie:
( )
t
F
kx
dt
dx
b
dt
x
d
m
m
''
cos
2
2
ω
=
+
+
(19)
Rozwiązaniem równania 19 jest:
(
)
ϕ
ω
−
=
t
G
F
x
m
''
sin
(20)
gdzie
(
)
2
2
2
2
2
2
''
''
ω
ω
ω
b
m
G
+
−
=
, a
G
b
''
arccos
ω
ϕ
=
Widać, że układ drga z częstością siły wymuszającej, a nie częstością własną. Gdy częstość siły
wymuszającej zbliży się do częstości własnej układu
ω
ω
→
''
, to
0
→
G
, a więc
∞
→
G
F
m
/
i amplituda rośnie do nieskończoności.
Oczywiście w rzeczywistości siła tłumiąca nie pozwoli na nieskończoną amplitudę drgań.
Osiągną one jednak maksymalną amplitudę – układ będzie w stanie rezonansu. Im słabsza jest siłą
tłumiąca, tym częstość rezonansowa (częstość siły wymuszającej, przy której następuje rezonans) jest
bliższa częstości drgać własnych układu.
Wyprowadzenia wzorów 17 i 20 znajdziecie w:
W. Rubinowicz, W. Królikowski, Mechanika teoretyczna, PWN, Warszawa 1978
Wyszukiwarka
Podobne podstrony:
Ruch harmoniczny prosty, Nauka, MEDYCYNA WETERYNARYJNA, BIOFIZYKA
Wykład 14 Drgania wymuszone oscylatora harmonicznego ppt
Egzamin - sciagi, 10. Oscylator harmoniczny., 10
Oscylator harmoniczny, POLITECHNIKA, AiR, Semestr II, FIZYKA, WYKŁADY
prawo hooka oscylacje harmoniczne
rownanie oscylatora harmonicznego
Ruch Harmoniczny Prosty, Sprawozdania - Fizyka
Zadania - ruch harmoniczny prosty, Politechnika Gdańska, Budownictwo, Semestr I, Fizyka I, Ćwiczenia
cw 5 - Badanie oscylatora harmonicznego, Sprawozdania jakieś, Fizyka [na chemii]
Ruch Harmoniczny Prosty2, Sprawozdania - Fizyka
Wzór na energię mechaniczną oscylatora harmonicznego
00529 Ruch harmoniczny prosty D 2008 Wahadło, paramtery drgań(1)
ruch harmoniczny, Transport i Logistyka (AM) 1 (semestr I), Fizyka, fiza laborki (rozwiązania), Cw 0
Dogładzanie oscylacyjne# 04 2013
25 ruch prosty harmoniczny
więcej podobnych podstron