
Pamięć (część 1)
1
Przedmioty prowadzone w ramach
Programu Rozwoju WSFiZ w Białymstoku realizowane są w ramach
Programu Operacyjnego Kapitał Ludzki, Priorytet IV Szkolnictwo wyższe i nauka, Poddziałanie 4.1.1
Wzmocnienie potencjału dydaktycznego uczelni, współfinansowanego ze środków
Europejskiego Funduszu Społecznego (POKL.04.01.01-00-030/08)
9.
Pamięć (część 1)
Spis treści
Klasyfikacja ze względu na technologię wytwarzania ........................................... 7
9.1 Podstawowe typy i parametry
Zgodnie z założeniami sformułowanymi przez von Neumanna pamięć systemu
komputerowego służy do przechowywania rozkazów i danych. Jeżeli potraktować ją jako czarne
pudełko realizujące określone funkcje, to najważniejszymi parametrami charakteryzującymi
pamięć są:
1. Pojemność;
2. Szybkość;
3. Koszt;
4. Pobór mocy.
Pojemność (ang. capacity) określa ilość informacji, która może być w niej przechowywana.
Mierzona jest najczęściej w bajtach lub słowach. Niezależnie od jednostek, w których wyraża się
pojemność pamięć dzieli się na fragmenty o stałej długości, którym przyporządkowuje się
kolejne liczby całkowite nazywane adresami. W zależności od typu pamięci (patrz dalej)
fragmenty te mogą mieć różną wielkość. W pamięci głównej (tzw. operacyjnej) komputera
fragmenty te mają zazwyczaj długość słowa i nazywane są komórkami. Długość słowa zawiera
się pomiędzy bajtem (dla mikrokomputerów) a ośmioma bajtami (dla dużych instalacji). W
związku z tym wyrażając pojemność pamięci w słowach zwyczajowo podaje się liczbę słów i
wielkość słowa, przy czym liczbę słów poprzedza się mnożnikiem lub jego skrótem, np. Kilo-
(K, mnożnik = 2
10
), Mega- (M, mnożnik = 2
20
), Giga- (G, mnożnik = 2
30
) czy Tera- (T, mnożnik
= 2
40
).
W pamięciach masowych, które są zazwyczaj większe od pamięci operacyjnych, adresuje się
fragmenty o długości od kilkuset do kilku tysięcy bajtów. Dobrym przykładem są tu dyski
magnetyczne, dla których takim fragmentem jest tzw. sektor (patrz rozdział 9.3 Pamięci
Pamięć (część 1)
2
dyskowe). Istotną cechą opisywanego fragmentu jest to, że jest on najmniejszą porcją, którą
można zapisać do lub odczytać z pamięci.
Szybkość pamięci określa jak często można z niej korzystać. Na tą okoliczność podawane są
różne parametry, np. takie jak:
Czas dostępu (ang. access time);
Czas cyklu (ang. cycle time);
Szybkość transmisji (ang. transfer speed).
Czas dostępu jest czasem pomiędzy momentem zażądania dostępu do informacji a chwilą, w
której ta informacja pojawi się na wyjściu pamięci. Dla pamięci operacyjnej wartości czasu
dostępu zawierają się pomiędzy 10 ns a 100 ns.
Czas cyklu jest najkrótszym czasem, jaki musi upłynąć pomiędzy dwoma kolejnymi żądaniami
dostępu do pamięci. W istocie jest to opóźnienie wnoszone przez układy elektroniczne, z których
zrobiona jest pamięć. Zazwyczaj jest to czas nieco dłuższy od czasu dostępu.
Szybkość transmisji wyraża się liczbą bajtów, jaką można przesłać w jednostce czasu
pomiędzy pamięcią a innym urządzeniem. Zazwyczaj jest on stosowany do urządzeń, dla których
fragment jest dużo większy niż słowo. Wynika to z faktu, że w takich urządzeniach najmniejszą
adresowalną jednostką jest wspomniany fragment, czyli zapisuje się go lub odczytuje w całości, a
w takiej sytuacji czas dostępu do pojedynczego słowa jest mniej istotny.
Co do kosztów, to światowy trend wskazuje jednoznacznie, że jednostkowa cena pamięci
nieustannie spada. Najwyraźniej widać to na pamięciach półprzewodnikowych. Rynek jest
jednak mocno zróżnicowany. Z jednej strony występują na nim tanie, ale niezbyt szybkie układy
scalone pamięci półprzewodnikowych o dużych pojemnościach. Z drugiej – szybkie układy
pamięciowe mające niewielkie pojemności i na dodatek wysoką cenę. Stąd w praktyce pamięci
operacyjne realizuje sie przede wszystkim na dużych, tanich ale wolnych układach
półprzewodnikowych. Jednocześnie w celu przyśpieszenia wykonywania programów używa się
jako pomocniczą, współpracującą z główną, niewielką, drogą ale szybką tzw. pamięć
kieszeniową (ang. cache memory). Zagadnienia organizacji współpracy obu rodzajów pamięci
będą omówione w dalszej części tego rozdziału (patrz rozdział 9.2.4 Pamięć kieszeniowa).
Każdy pracujący układ scalony pobiera moc i wydziela ciepło. O ile budowanie odpowiednio
wydajnych zasilaczy nie stanowi (poza kosztami) jakiegoś szczególnego problemu, to szybkie
odprowadzenie ciepła tak, aby utrzymać nominalną temperaturę pracy układu już nim jest.
Problem wielkości poboru mocy, do pominięcia w niewielkich pamięciach, staje się istotnym
problemem dla bardzo dużych pamięci. Łączonych jest wtedy ze sobą dużo układów scalonych i
ilości wytworzonego ciepła mogą być trudne do odprowadzenia. Innym obszarem, gdzie
zagadnienie minimalizacji poboru mocy musi być traktowane jako pierwszoplanowe jest świat
laptopów i komputerów kieszonkowych. Zagadnienie staje się szczególnie krytyczne, jeżeli
rośnie zapotrzebowanie na moc ze strony innych części systemu komputerowego, np. procesora.
Konstruktorzy zmuszeni są do instalowania w systemie komputerowym wielu rodzajów
pamięci. Różne rodzaje pamięci półprzewodnikowych są niezbędne, gdyż jako jedyne dorównują
swoją szybkością procesorowi, a w związku z tym mogą z nim efektywnie współpracować;
szybkie pamięci magnetyczne (głównie dyski) – ponieważ są pojemnymi pamięciami
nieulotnymi (zachowują informację po wyłączeniu napięcia), na których można zrealizować
system plików i przechowywać oprogramowanie (w tym kod systemu operacyjnego) oraz różne
istotne informacje użytkownika; dyski optyczne i pamięci taśmowe – bo są wygodnym

Pamięć (część 1)
3
(pojemnym, przenośnym) narzędziem do sporządzania kopii bezpieczeństwa (ang. backup) oraz
dystrybuowania oprogramowania. Wszystkie one tworzą tzw. hierarchię pamięci. Można
wyróżnić 5 jej poziomów:
1. Pamięć rejestrowa;
2. Pamięć kieszeniowa;
3. Pamięć operacyjna;
4. Pamięć masowa;
5. Pamięć zewnętrzna.
nazwa
pojemność
Czas dostępu
rejestrowa
<1Kb
<1 ns
kieszeniowa
≤144MB
1÷10 ns
operacyjna
512MB÷16GB
10÷100 ns
masowa
>100GB
<10 ms
zewnętrzna
nieograniczona
sekundy÷minuty
Tabela 9.1. Zestawienie parametrów różnych typów pamięci
Pamięć rejestrową tworzą wszystkie rejestry znajdujące się w procesorze. Ponieważ jest ich od
kilku do kilkudziesięciu to jest pamięć o najmniejszej pojemności, ale za to o najkrótszym czasie
dostępu. Poza tym niektóre z rejestrów są dostępne jedynie dla układu sterowania, inne (tzw.
rejestry ogólnego przeznaczenia) są dostępne dla programisty.
Pamięć kieszeniowa jest niezbyt dużą (poniżej 144MB) pamięcią o czasie dostępu rzędu 1÷10
ns. Pełni rolę bufora na podręczne, często używane informacje. Może być umiejscowiona w
procesorze (ang. internal cache; L1, L2) albo poza nim (ang. external cache; L3). Ze względu na
mały czas dostępu istotnie przyśpiesza ona działanie procesora. Wybrane problemy jej
organizacji będą omówione później w tym rozdziale.
Pamięć operacyjna jest główną pamięcią komputera. Jej pojemność może sięgać kilkunastu
Giga bajtów. Ponieważ tendencja jest wzrostowa to można spodziewać się, że granice te mogą
być w bliskiej przyszłości przesunięte w górę. Czas dostępu zależy mocno od zastosowanej
technologii, ale najczęściej jest to 10÷100 ns.
Pamięć masowa jest zwykle realizowana na dyskach magnetycznych. Jej pojemność jest rzędu
setek Mega bajtów dla mikrokomputerów do Tera bajtów dla dużych instalacji. Czas dostępu
zazwyczaj nie przekracza 10 ms. Dyski są przedstawicielami tzw. pamięci nieulotnych, tzn.
takich, w których zapisane informacje nie giną po zaniku napięcia zasilającego.
Odnośnie pamięci zewnętrznych trudno operować parametrami liczbowymi, gdyż te są mocno
zależne od konkretnego typu pamięci. Nawiasem mówiąc ten rodzaj pamięci, w odróżnieniu od
pozostałych, jest wyjątkowo niejednorodny technologicznie. Są tu i streamery, gdzie nośnikiem
jest taśma magnetyczna, ale również dyski optyczne (oba są pamięciami nieulotnymi). Można
tylko powiedzieć, że ich kluczowym parametrem jest czas transmisji. Ich najważniejszą cechą
jest możliwość wymiany nośnika. Ponieważ rozbudowane systemy informacyjne (np. bazy
danych) mogą być przechowywane na wielu nośnikach to daje to tą korzyść, że w danej chwili
używa się tylko potrzebnego nośnika.
Pamięć (część 1)
4
Zestawienie rodzajów i parametrów pamięci znajduje sie w tabeli 9.1 (patrz wyżej)
Ze względu na sposób dostępu do informacji pamięci można podzielić na cztery następujące
klasy:
1. Pamięci z dostępem bezpośrednim;
2. Pamięci z dostępem cyklicznym;
3. Pamięci z dostępem sekwencyjnym;
4. Pamięci z dostępem asocjacyjnym.
Nazwa „dostęp bezpośredni” albo inaczej „swobodny” (ang. RAM – random access memory)
wzięła się stąd, że czas dostępu w tych pamięciach nie zależy od adresu komórki. Nośnikami
informacji w tych pamięciach są tzw. matryce elementów. Zasada działania matryc jest taka, że
każdy element matrycy pamięta jeden bit. Dla n-bitowego adresu i m-bitowego słowa matryca
realizuje 2
n
słów m-bitowych, czyli jest pamięcią o pojemności 2
n
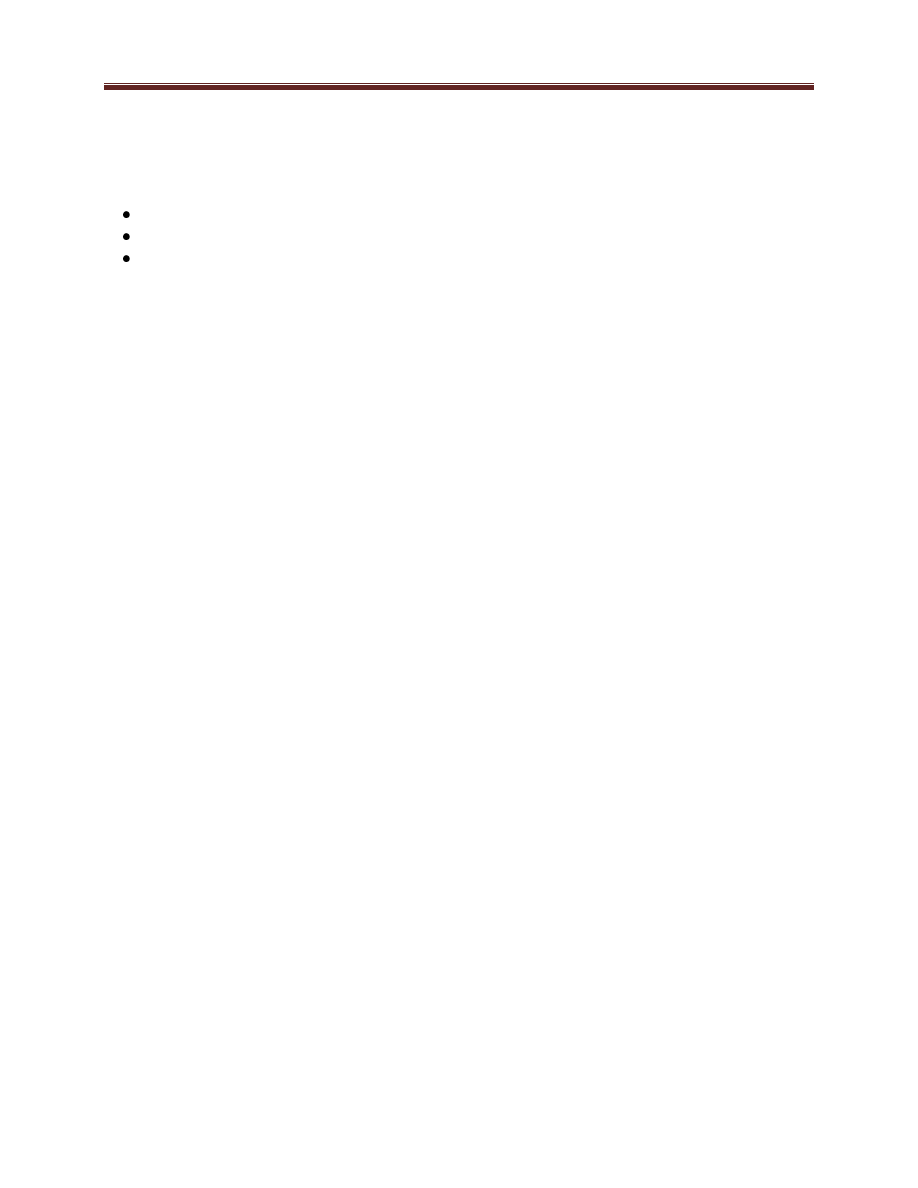
×m. Schemat działania takiej
pamięci pokazany jest na rysunku 9.1.
n
Matryca
m
m
Adres
2
n
×m
Bufor
E
R/W
Rysunek 9.1. Schemat pamięci RAM
Jak wynika z rysunku procesor wysyła n-bitowy adres i sygnał E, który uaktywnia wejściowy
dekoder (na rysunku oznaczony jako prostokąt przekreślony ukośną linią). Przekształca on adres
w numer słowa. Linią R/W wysyłany jest sygnał rodzaju pracy: odczyt/zapis (ang. read/write). W
rezultacie, na koniec cyklu odczytu w wyjściowym buforze pojawia się m-bitowe słowo, a na
koniec cyklu zapisu słowo z bufora zostaje zapamiętane pod podanym adresem. Proszę zwrócić
uwagę na sposób określania z ilu bitów składa się szyna. Obu-kierunkowe strzałki między
matrycą a buforem oraz ta na wyjściu są niezbędne, gdyż przy zapisie i odczycie m-bitowego
słowa kierunek przepływu informacji jest przeciwny.
Specjalnym rodzajem pamięci o dostępie swobodnym są pamięci ROM (ang. read only
memory). Są to pamięci jednokrotnie zapisywane i wielokrotnie odczytywane (patrz niżej). Przy
okazji: pamięci RAM są wielokrotnie zapisywane i wielokrotnie odczytywane.
Pamięci z dostępem cyklicznym to przede wszystkim dyski będące przedstawicielem grupy
pamięci z ruchomym nośnikiem. Grupę drugą: pamięci cyklicznych z nośnikiem nieruchomym
tworzą pamięci zbudowane na rejestrach przesuwnych, w których informacja krąży w zamkniętej
pętli sprzężenia zwrotnego. Zasada działania pamięci cyklicznych jest taka, że co pewien
ustalony czas umożliwia ona odczyt lub zapis informacji pod pewien adres nazywany adresem
bieżącym. Porównując ten adres z adresem wejściowym można wychwycić moment zgodności i
wykonać akcję zapisu lub odczytu.
Pamięci z dostępem sekwencyjnym są pamięciami realizowanymi na taśmach magnetycznych
w urządzeniach nazywanych streamerami. Informacja zapisywana jest w kolejności jej
przychodzenia w porcjach nazywanych blokami lub rekordami. Aby odczytać informację należy
Pamięć (część 1)
5
podać numer bloku liczony od początku nośnika, a urządzenie przewinie taśmę do bloku o
wskazanym numerze.
Pamięci asocjacyjne (ang. associative memory) nazywane są również pamięciami
adresowanymi zawartością (ang. content addressable memory) albo pamięciami
skojarzeniowymi. Pamięci takie składają się z pamięci RAM oraz dodatkowej elektroniki
przeszukującej jej zawartość. Przykłady takiej pamięci zostaną opisane dalej w tym rozdziale.
9.2
Pamięć operacyjna
9.2.1
Rodzaje pamięci operacyjnych
Zostaną omówione dwie klasyfikacje pamięci operacyjnych: pierwsza bazuje na różnicach w
sposobie wybierania elementów z matryc, druga – na różnicach w technologii wytwarzania.
Zaczniemy od tej pierwszej.
9.2.1.1 Organizacja matryc
Nośnikami informacji w pamięci operacyjnej są tzw. matryce elementów. Ich ogólna definicja i
sposób działania został opisany wyżej.
Matryca może być tak skonstruowana, że w każdym jej wierszu znajduje się dokładnie jedno
słowo. Wejściowy dekoder zamienia adres na numer słowa, które przy odczycie pojawia się na
liniach wyjściowych, a przy zapisie, korzystając z tych samych linii ustawia wartości bitów w
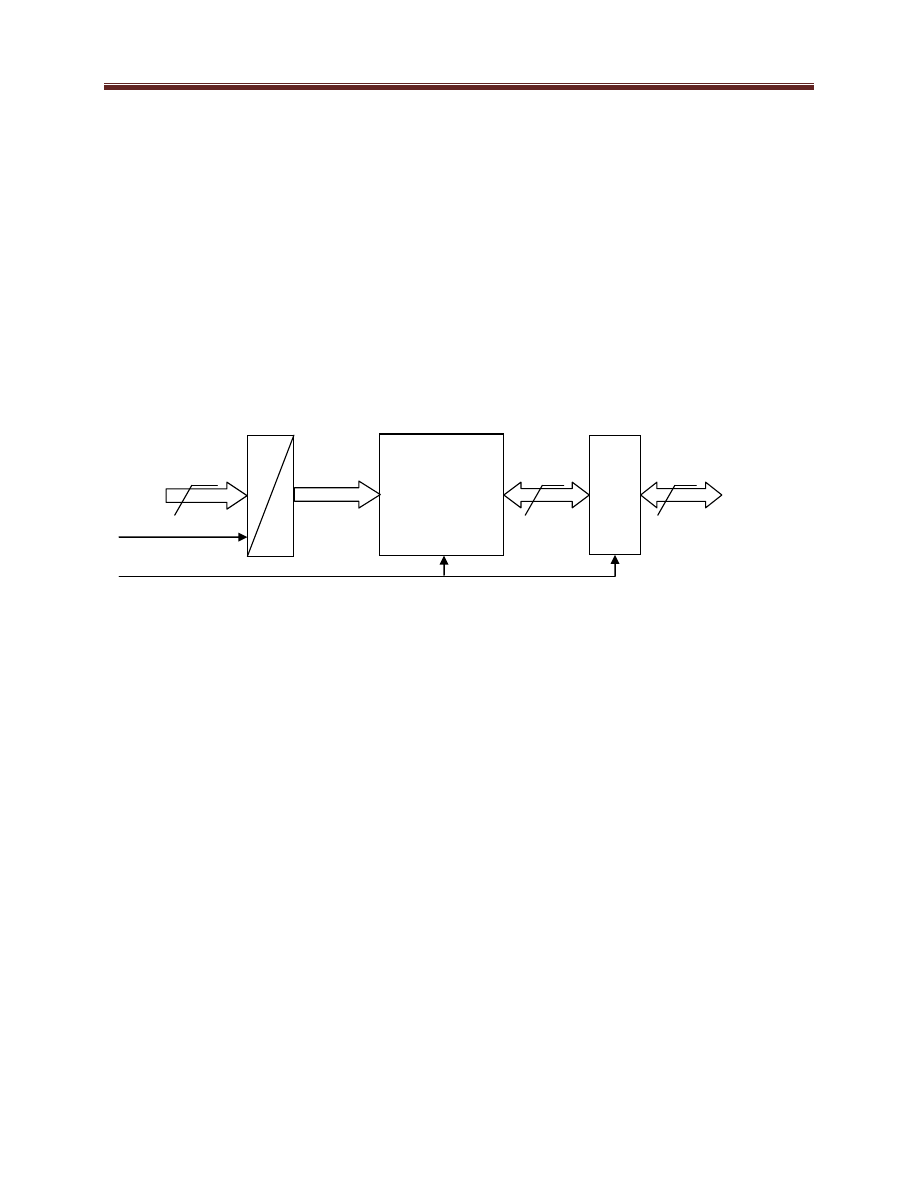
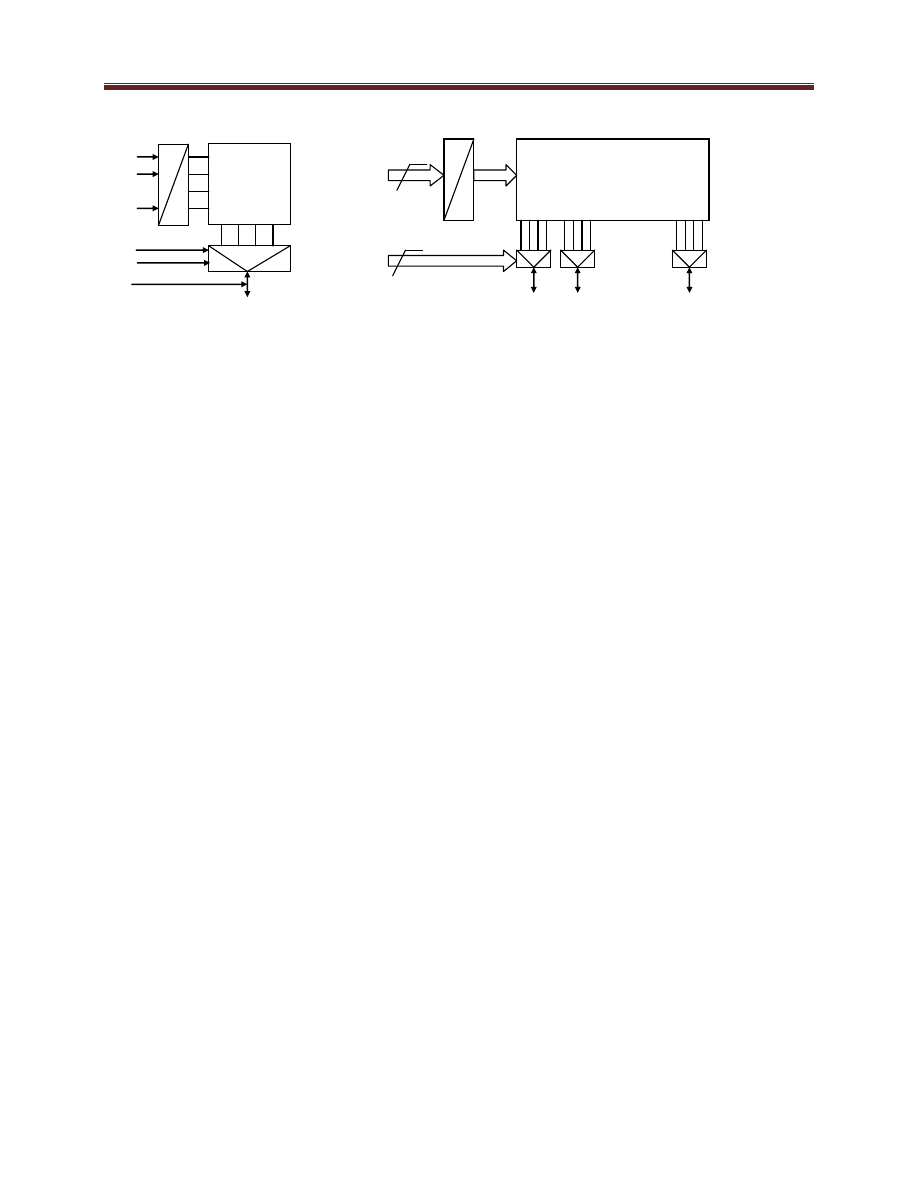
wybranym słowie zgodnie z podanymi na nich wartościami. Na rysunku 9.2a pokazana jest
przykładowa pamięć o takiej organizacji.
a)
b)
a
0
wejścia
a
1
Matryca
wybierające
E
R/W
linie danych
Rysunek 9.2. Pamięć typu 2D: a) matryca; b) układ współpracujący
Jej pojemność wynosi 16 bitów ułożonych w matrycę 4×4 (4 słowa 4-ro bitowe). Wystarczy
określić jedną linię (podać na nią jedynkę) aby wybrać całe słowo. Na rysunku 9.2b pokazany
jest schemat układu współpracującego z opisaną matrycą. W związku z przyjętą organizacją
dekoder wejściowy przekształca 2-bitowy adres (2 bity a
1
a
2
wystarczą, aby ponumerować każde
z 4 słów) w sygnał na dokładnie jednym z 4 swoich wyjść, a mianowicie tym, którego numer jest
zakodowanym binarnie adresem (taki sposób kodowania nazywa się kodowaniem 1 z n, w
naszym przykładzie 1 z 4). Kierunek przepływu informacji na wyjściach układu
współpracującego wynika z realizowanej operacji: odczytu lub zapisu.
Pamięć (część 1)
6
Pamięć z matrycą wyposażoną w jedno wejście wybierające nazywana jest pamięcią z
wybieraniem liniowym lub pamięcią typu 2D. Jej podstawową wadą jest konieczność używania
dekodera o liczbie wyjść równej pojemności pamięci (liczonej w słowach). Przy rozmiarach
pamięci np. 64K daje to dekoder o 16 wejściach i 2
16
wyjściach. Skonstruowanie takiego
dekodera jest trudne.
W związku z tym używa się pamięci o dwóch liniach wybierających – pamięć o takiej
organizacji nazywa się pamięcią 3D. Jedna linia wybiera wiersz matrycy, druga kolumnę. W obu
przypadkach sygnałem wybierającym jest jedynka. Matryca zorganizowana jest w płaty
(podmatryce), z których każdy przechowuje jeden bit słowa, tak więc płatów jest tyle ile bitów w
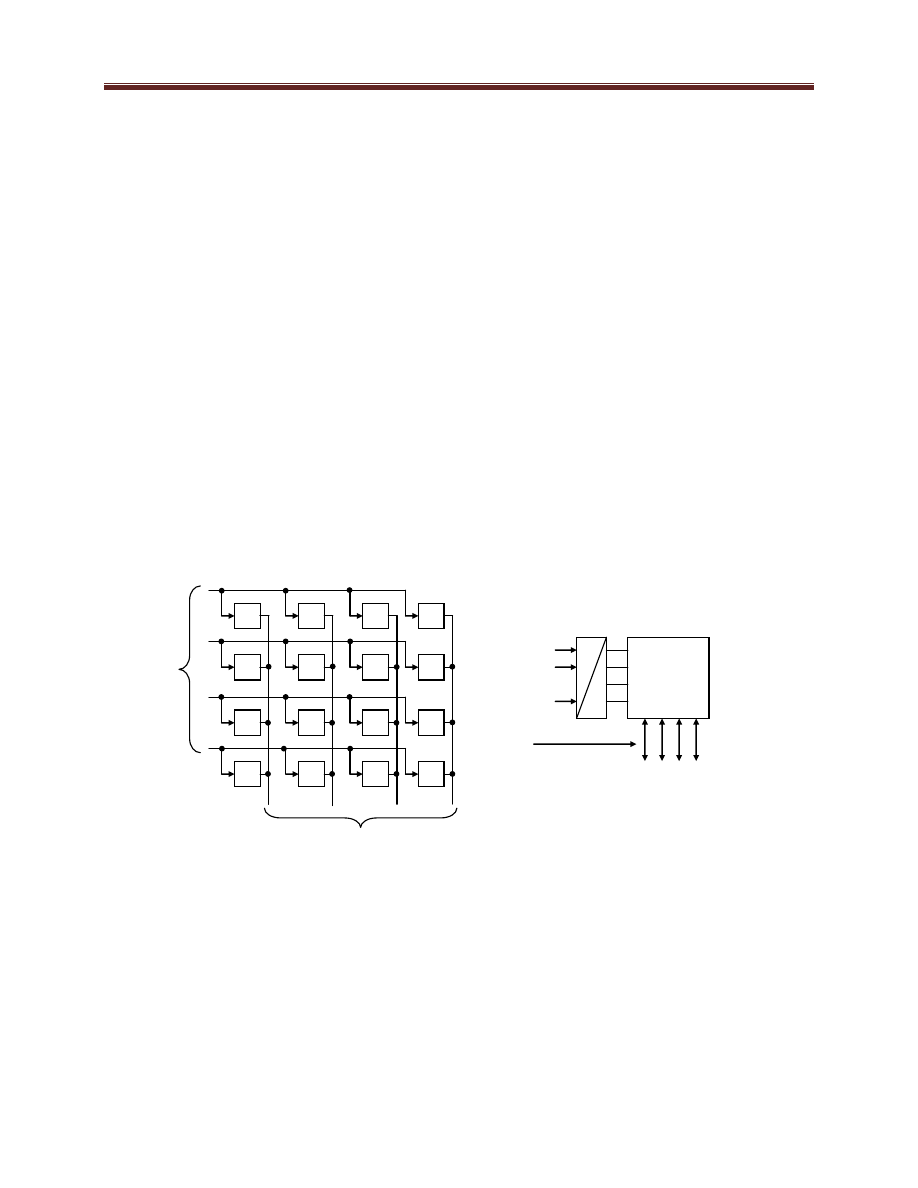
słowie. Na rysunku 9.3a (patrz niżej) pokazana jest organizacja pojedynczego płata dla pamięci
16×4 (16 słów 4-ro bitowych).
Z 4 bitów adresu 2 (a
0
a
1
) wybierają wiersz, a pozostałe dwa (
a
2
a
3
) kolumnę.
Przy typie 3D i rozmiarach pamięci 64K potrzebujemy dwa dekodery o 8 wejściach i 2
8
wyjściach. Są one prostsze do skonstruowania niż dekoder o 2
16
wyjściach niezbędny przy
realizacji pamięci o takiej samej pojemności, ale typie 2D. Ceną, która płacimy jest wydłużenie
czasu dostępu ze względu na wydłużenie czasu dekodowania.
a)
b)
linie
danych
a
0
Płat
a
1
4×4
E
a
2
a
3
Rysunek 9.3. Pamięć typu 3D: a) płat; b) układ współpracujący
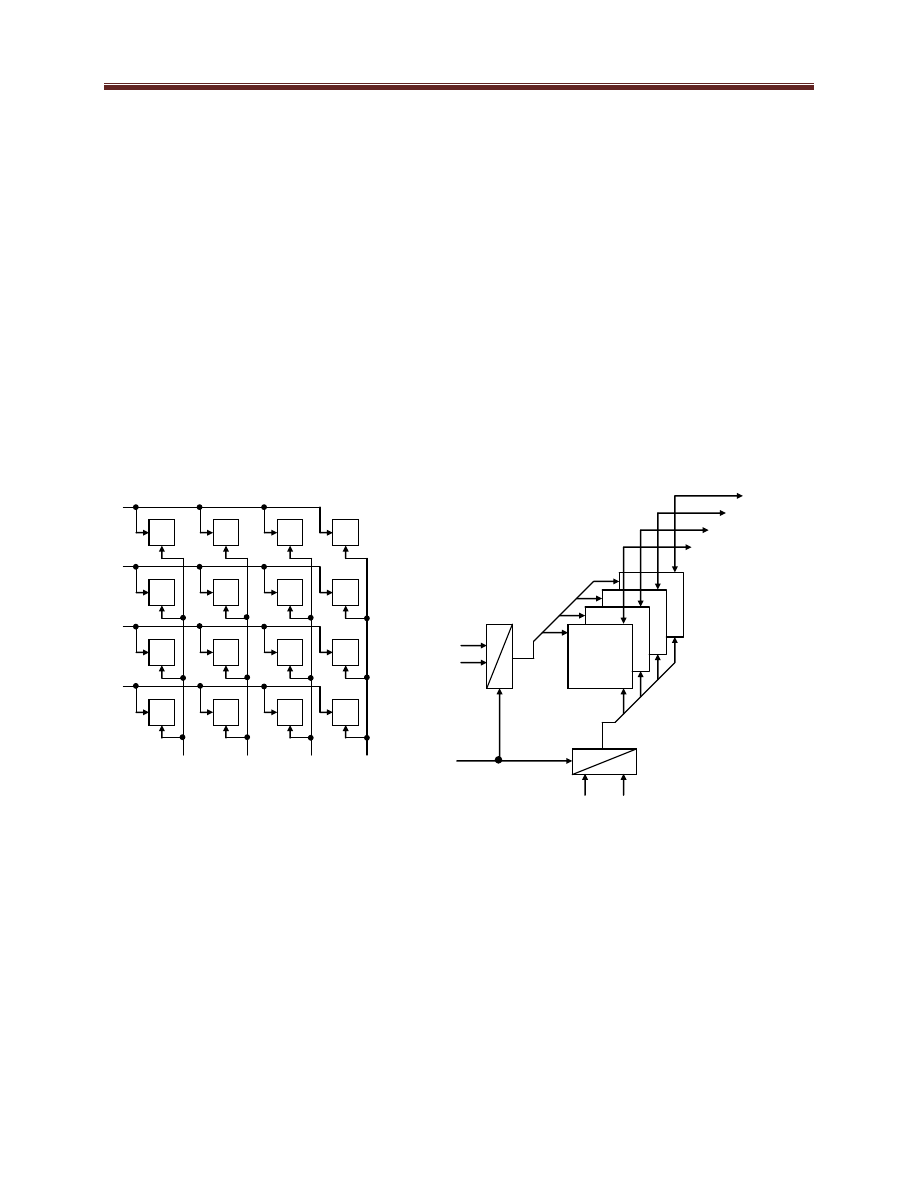
Istnieje rozwiązanie pośrednie, tzw. typ 2½D. Tak jak w typie 2D jedna linia wybiera 1 wiersz,
ale do słowa wyjściowego przechodzą z tego wiersza tylko wybrane kolumny (np. co piąta licząc
od pierwszej albo co piąta licząc od drugiej albo co piąta od trzeciej albo co piąta od czwartej).
Wyboru dokonuje się za pomocą multiplekserów, z których każdy sterowany jest tą sama częścią
bitów adresu. Mamy więc jedną matrycę, a na jej wyjściu tyle multiplekserów ile bitów w słowie,
a każdy z nich wybiera po jednym, kolejnym bicie do słowa wyjściowego. Na rysunku 9.4a
pokazana jest matryca 2½D dla pamięci 16×1, a na rysunku 9.4b – 1K×8 (patrz niżej).
Pamięć (część 1)
7
a)
b)
a
0
7
a
1
Matryca
adres
Matryca
128×64
E
a
2
3
a
3
adres 1 2 .... 8
R/W
Rysunek 9.4. Pamięć typu 2½D: a) 16×1; b) 1K×8
Obliczenie parametrów dla pamięci z rysunku 9.4b wymaga nieco arytmetyki. Zauważmy, że
w ogólności, jeżeli mamy skonstruować matrycę dla 2
n
słów po 2
m
bitów w słowie, to istnienie
matrycy kwadratowej jest możliwe jeżeli n+m jest parzyste. Wtedy mamy m+n = 2∙p. Pojemność
matrycy wynosi 2
n
∙2
m
= 2
n+m
=2
2∙p
i istnieje pierwiastek z tej liczby równy 2
p
, który jest
jednocześnie liczbą wierszy (l) i kolumn (k) poszukiwanej matrycy kwadratowej. W naszym
przykładzie matryca liczy 1K=2
10
słów 8=2
3
bitowych, czyli n=10, m=3, i m+n=13, co oznacza,
że matryca kwadratowa nie istnieje i trzeba konstruować matrycę prostokątną. Liczba wierszy
wynosi l = 2
10
/2
3
=2
7
=128. Ponieważ k∙ l = 2
10
to k = 2
10
/l = 2
10
/2
7
= 2
6
= 64. Pamięć ma słowa 8-
bitowe, co oznacza, że potrzeba 64/8 = 8 multiplekserów wybierających na wyjściu 8 jego bitów.
Na zakończenie tej części należy podnieść ponownie kwestię długości słowa pamięci. Ze
względu na możliwość powstawania przekłamań (zjawisko polegające na tym, że słowo zapisane
i odczytane różnią się od siebie) powodowanych przez niewłaściwe poziomy napięć albo zbyt
duże natężenie promieniowania stosuje sie układy detekcji i korekcji takich przekłamań.
Najpopularniejszą metodą detekcji błędów są tzw. bity parzystości. Metoda polega na tym, aby
przy zapisie dopisać do każdego słowa bit z ustawioną jedynką, jeżeli liczba jedynek w słowie
jest parzysta i bit z zerem - jeżeli jest nieparzysta. Jeżeli przy odczycie wykona się identyczną
operację, to porównanie wartości odczytanego i obliczonego bitu parzystości pozwala na
wykrycie przekłamań na nieparzystej liczbie bitów słowa. Jedną z popularniejszych metod
detekcji i korekcji są tzw. kody CRC, które opierają się również na dopisywaniu do każdego
słowa dodatkowych bitów. W obu przypadkach długość słowa ulega zmianie, a z nią zmienia sie
pojemność całej pamięci. Stąd operując długością słowa pamięci należy upewnić się, czy w
podawanej liczbie zostały uwzględnione bity realizujących opisane wyżej cele.
9.2.1.2 K
lasyfikacja ze względu na technologię wytwarzania
Druga klasyfikacja pamięci opiera się o różnice w technologii wytwarzania. Omówione
zostaną dwa podziały: pierwszy dotyczy tzw. pamięci stałych (nazywanymi również pamięciami
„tylko do odczytu”) ROM (ang. read only memory) wyróżniających się swoimi własnościami na
tle wszystkich innych pamięci półprzewodnikowych, które na tą okoliczność nazywa się
nieprecyzyjnie pamięciami RAM. Podział drugi dotyczy wyłącznie pamięci RAM. Wyróżnia się
wśród nich pamięci statyczne SRAM (ang. static RAM) oraz dynamiczne DRAM (ang. dynamic
RAM).
Pamięci ROM, pomimo że są pamięciami półprzewodnikowymi zachowują swoją zawartość
po wyłączeniu napięcia zasilającego (są pamięciami nieulotnymi). Ta cecha oraz duża (w
porównaniu np. z pamięciami dyskowymi) szybkość działania zadecydowała o używaniu ich do
Pamięć (część 1)
8
przechowywaniu istotnych składników systemu operacyjnego (np. BIOSu). Zaprezentowana
poniżej klasyfikacja typów pamięci ROM podana została w ujęciu historycznym, od typów
powstałych najwcześniej do typów nowszych. Pozwala to prześledzić rozwój technologii ze
świadomością, że niektóre z typów nie są już używane.
MROM (ang. maskable ROM) – zawartość tych pamięci ustalana jest w procesie produkcji
przez stosowanie odpowiednich masek (stąd nazwa). Maski są sposobem na kształtowanie
pożądanych cech funkcjonalnych układów scalonych. Jest to najtańszy rodzaj pamięci ROM
(przy założeniu odpowiednio długiej serii produkcyjnej).
PROM (ang. programmable ROM) – zawartość tej pamięci można zaprogramować ale
można to zrobić tylko raz (proces programowania niszczy nieodwracalnie pewne połączenia
wewnętrzne pamięci). Obecnie ten typ nie jest używany.
EPROM (ang. erasable ROM) – pamięć wielokrotnie programowalna. Poprzednią
zawartość można skasować przez naświetlenie kości pamięci promieniami UV. Można to
zrobić po uprzednim wyjęciu kości z komputera. Obecnie ten typ jest używany sporadycznie.
EEPROM albo E
2
PROM (ang. electrically erasable PROM) – pamięć kasowana i
programowana w drodze podawanie na jej wejścia odpowiednich sekwencji sygnałów. Proces
ten może przebiegać bez konieczności wyjmowania kości z komputera. W ten sposób można
np. instalować nowe wersje BIOSa.
Warto wspomnieć o pamięci typu NVRAM (ang. non volatile RAM). Jest to połączenie
pamięci RAM z EEPROM. W tym typie pamięci można na żądanie przepisać zawartość pamięci
RAM do EEPROM. Czas tej operacji jest wprawdzie długi (kilkanaście ms) ale uzyskujemy
bardzo wygodną możliwość przechowania przez dowolnie długi czas określonych, wcześniej
wypracowanych wartości. Dobrym przykładem zastosowań są tu parametry konfiguracyjne, z
których korzystamy przy włączaniu systemu komputerowego, a które od czasu do czasu
zmieniamy zgodnie z naszymi potrzebami.
Czas dostępu dla pamięci typu EEPROM jest rzędu 100 – 200 ns. Mogą być one wyposażone
w mechanizm pozwalający na wprowadzanie tzw. stanu wyłączenia (ang. standby power). W taki
stan można wprowadzić układ, kiedy nie jest realizowany ani zapis ani odczyt. Wtedy pobór
mocy może spadać w nim nawet 100–krotnie w stosunku do mocy pobieranej w stanie
aktywnym.
Przejdźmy do podziału na pamięci statyczne SRAM oraz dynamiczne DRAM. Pamięci
statyczne SRAM są to szybkie, drogie, ale o niezbyt dużych pojemnościach, za to o dużym
poborze mocy pamięci półprzewodnikowe. Pojedynczy element takich pamięci (tj. element
pamiętający jeden bit) zawiera tzw. przerzutnik. Jest to 2-stanowy układ zbudowany z kilku
tranzystorów, sprzedawany na rynku również jako samodzielny układ, podobnie jak np. bramki
logiczne. To właśnie wysoki pobór mocy jest powodem problemów ze zbudowaniem układu
SRAM o dużej pojemności. Pamięci SRAM stosuje się wiec tam, gdzie pojemność nie musi być
szczególnie duża, za to wskazana jest jak największa szybkość działania. Takie właśnie
parametry powinna posiadać tzw. pamięć kieszeniowa (ang. cache memory). Problemy
organizacji takich pamięci i ich współpraca z procesorem oraz pamięcią operacyjną zostaną
omówione dalej w tym rozdziale.
Zajmijmy się teraz pamięciami dynamicznymi DRAM. Podstawowym elementem tych pamięci
jest kondensator. Jeżeli jest on naładowany, to taki stan interpretuję się jako bit równy jeden.
Pamięć (część 1)
9
Pobór mocy dla tych pamięci jest mały, a pojemność informacyjna (mierzone ilością bitów)
pojedynczych kości – duża. Szybkość tych pamięci nie jest imponująca – z reguły nie przekracza
100 ns. Ich podstawową wadą jest dosyć szybka utrata zapisanych informacji powodowana
rozładowywaniem się kondensatorów. Odczyt informacji przyśpiesza proces rozładowania. W
związku z tym zachodzi potrzeba okresowego odświeżania (ang. refresh) zawartości pamięci
(typowe wartości okresu odświeżania to 2, 4 lub 8 ms). Jeżeli dla potrzeby oszacowania
częstotliwości odświeżeń założymy, że jest to 1 ms, to mamy:
1 ms/100 ns = 10
-3
/100∙10
-9
= 10
-3
/10
-7
= 10
4
= 10 000;
co oznacza, że akcję odświeżania należy przeprowadzić raz na 10 000 cykli pamięci. Sama akcja
odświeżania polega na odczycie i powtórnym zapisie tej samej informacji. Wymaga to
chwilowego odłączenia procesora od pamięci, przejęcia magistrali przez generator adresów,
który wygeneruje kolejno wszystkie adresy komórek i wymusi na każdej z nich operację odczytu
i ponownego zapisu.
9.2.2
Banki pamięci i ich adresacja
Jak to już powiedziano, pamięci DRAM nie należą do najszybszych. W związku z tym
poszukiwano pozatechnologicznych sposobów poprawienia ich parametrów. Jednym z
powszechniej stosowanym jest podzielenie pamięci na części nazywane bankami, z których
każdy ma parę rejestrów: MAR i MDR pozwalających na niezależny zapis i odczyt.
Rozbicie pamięci operacyjnej na mniejsze banki pozwala po rozpoczęciu operacji zapisu lub
odczytu z dowolnego banku, zainicjować kolejną operację na innym banku nie czekając na
rezultat pierwszej z nich. W oczywisty sposób przyspiesza to pracę. Zysk czasowy przy n
sięgnięciach do adresów rozrzuconych po różnych bankach teoretycznie może sięgać n∙T
c
, gdzie
T
c
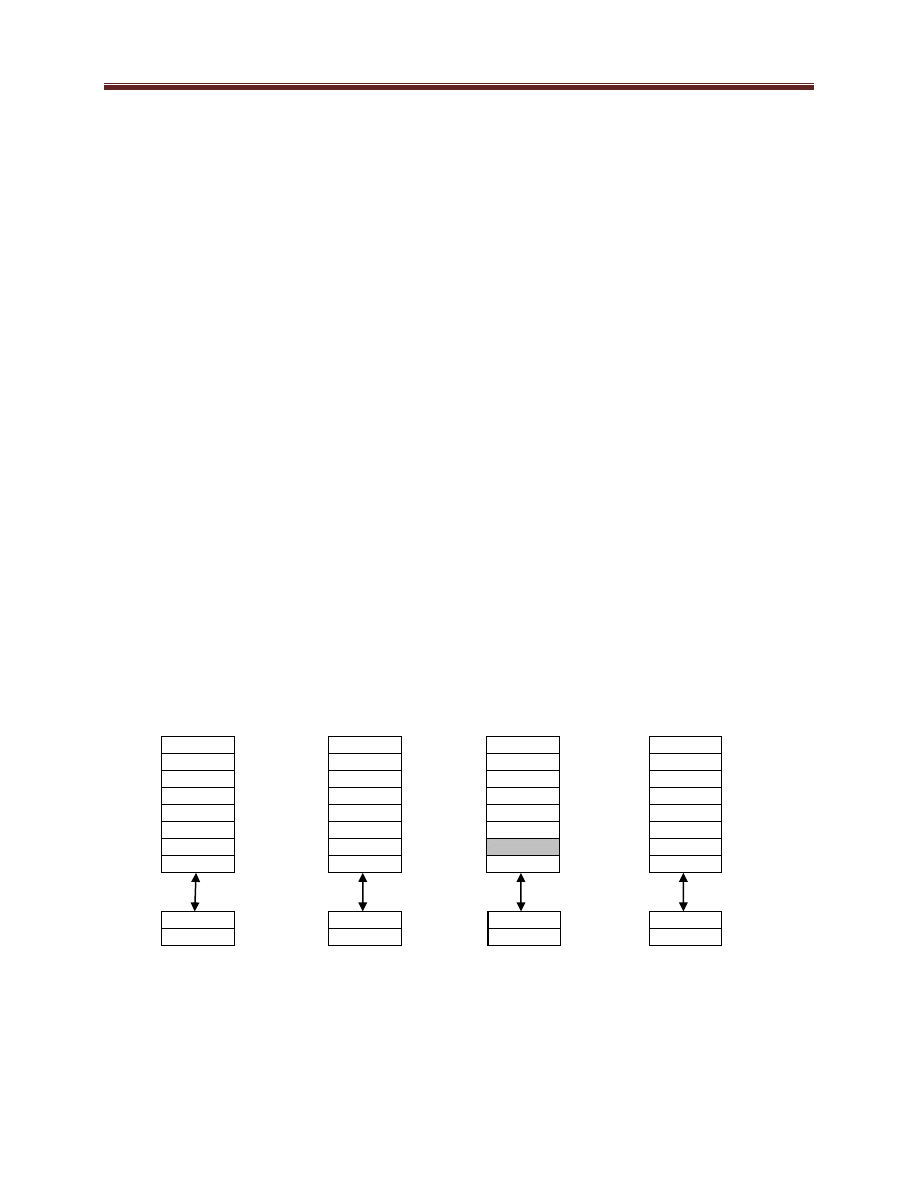
oznacza czas cyklu pamięci. Przykład pamięci o architekturze bankowej pokazano na rysunku
9.5. Są na nim 4 banki po 7 słów w każdym. Adresy takiej pamięci są 5-cio bitowe (przy 32
komórkach pamięci mamy: 32 = 2
5
). Dwa pierwsze bity interpretowane są jako numer banku, a
pozostałe 3 jako numer komórki w tym banku, np. komórka 22 = (10110)
2
oznacza szóstą
komórkę (6 = 110
2
) w banku numer 2 (2 = 10
2
).
bank 0
bank 1
bank 2
bank 3
0
8
16
24
1
9
17
25
2
10
18
26
3
11
19
27
4
12
20
28
5
13
21
29
6
14
22
30
7
15
23
31
MDR 0
MDR 1
MDR 2
MDR 3
MAR 0
MAR 1
MAR 2
MAR 3
Rysunek 9.5. Pamięć o architekturze bankowej
Oczywiście, jeżeli kolejne adresy są z tego samego banku to należy czekać i zysk spada do
zera. Rachunek prawdopodobieństwa wskazuje, że jeżeli wystąpiło sięgnięcie do komórki o
adresie m pamięci to sięgnięcie do komórki o adresie sąsiednim jest dużo bardziej
Pamięć (część 1)
10
prawdopodobne niż sięgnięcie pod inny adres. Oznacza to, że przy architekturze bankowej zyski
będą dużo mniejsze od maksymalnych.
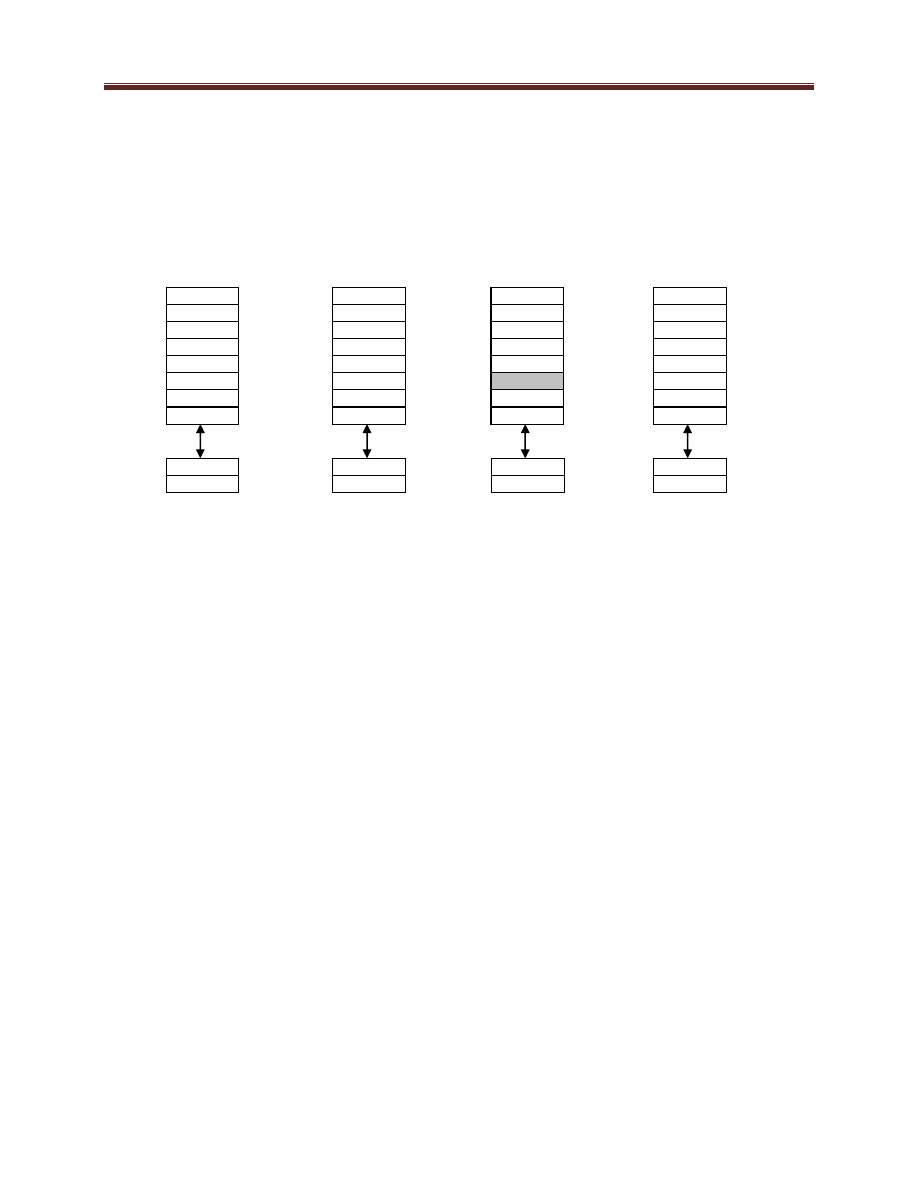
Rozwiązaniem tego problemu jest tzw. architektura z przeplotem. W takiej architekturze
komórki o sąsiednich adresach umieszczane są w różnych bankach. Efekt taki można uzyskać
używając najmniej znaczące bity w adresie jako numer banku. Przykład tego rodzaju pamięci
pokazany jest na rysunku 9.6 (patrz niżej).
bank 0
bank 1
bank 2
bank 3
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
MDR 0
MDR 1
MDR2
MDR3
MAR 0
MAR 1
MAR 2
MAR3
Rysunek 9.6. Pamięć o architekturze z przeplotem
Adresy takiej pamięci są tak jak uprzednio 5-cio bitowe. Dwa ostatnie bity interpretowane są jako
numer banku, a 3 pierwsze jako numer komórki w tym banku, np. komórka 22 = (10110)
2
oznacza piątą komórkę (5 = 101
2
) w banku o numerze 2 (2 = 10
2
).
Document Outline
Wyszukiwarka
Podobne podstrony:
9w Pamiec 3
9w Pamiec 2 v02
9w Pamiec 3
03 Odświeżanie pamięci DRAMid 4244 ppt
wykład 12 pamięć
8 Dzięki za Pamięć
06 pamięć proceduralna schematy, skrypty, ramyid 6150 ppt
Pamięć
PAMIĘĆ 3
Architektura i organizacja komuterów W5 Pamięć wewnętrzna
Test Pamięci Wzrokowej Bentona2 3
więcej podobnych podstron