
Część 3
RÓWNOLEG
Ł
Y UK
Ł
AD SI
Ł
3.1. Definicja równoleg
ł
ego uk
ł
adu si
ł
Równoleg
ł
y uk
ł
ad si
ł
Uk
ł
ad si
ł
, w którym si
ł
y są równoleg
ł
e do sta
ł
ego kierunku
A
r
M
R
S
R
π
π
e
∈ ∩ ⊥
i
i
i
M
F
r
= ×
i
i
M
F
⊥
i
M
π
M
π
M
S
⊥
K
=
0
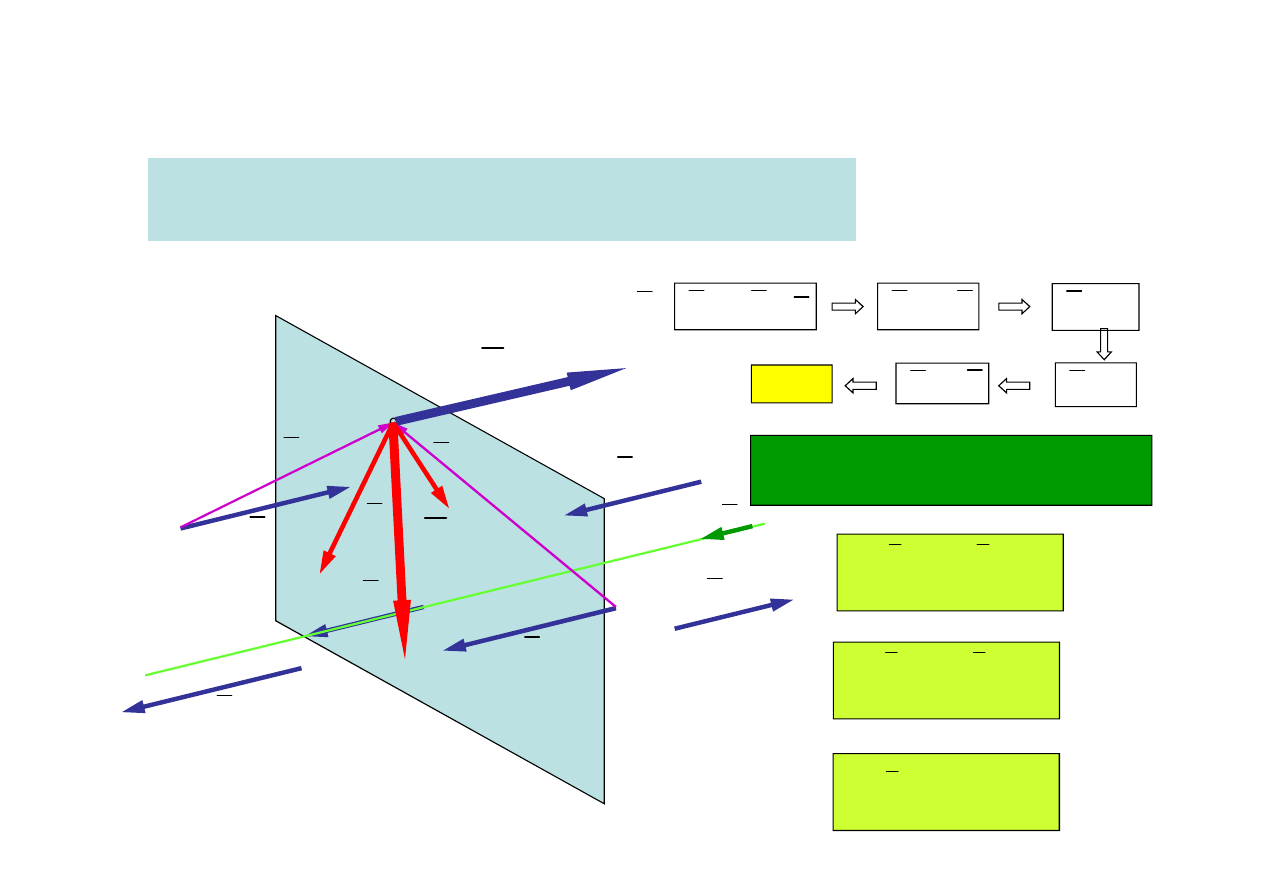
Trzy przypadki redukcji
2
F
1
F
2
F
3
i
F
F
4
n
F
e
A
1
A
2
A
3
i
A
n
A
A
4
r
1
M
1
i
M
M
π
Trzy przypadki redukcji
do najprostszej postaci
Para si
ł
2. S
M
= ∩
≠
0
0
Wypadkowa
3. S
≠
0
Uk
ł
ad zerowy
1. S
M
= ∩
=
0
0
3.2. Przyk
ł
ady równoleg
ł
ych uk
ł
adów si
ł
Si
ł
a dzia
ł
ająca wzd
ł
uż osi
Uk
ł
ad si
ł
równoleg
ł
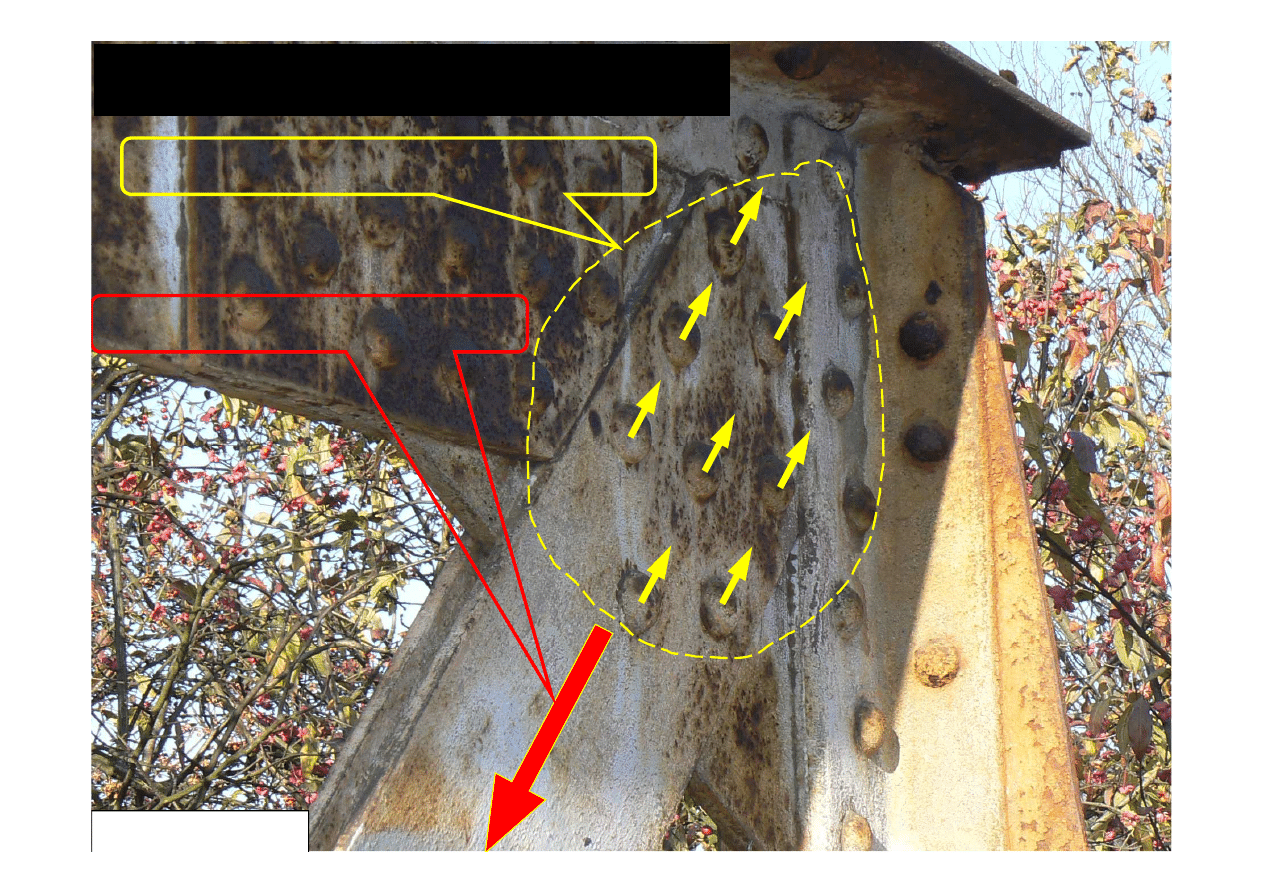
ych w nitach
Uk
ł
ad si
ł
w z
ł
ączu nitowanym
3
fotografia własna

Uk
ł
ad si
ł
nacisku kó
ł
na pod
ł
oże
4
Internet
5
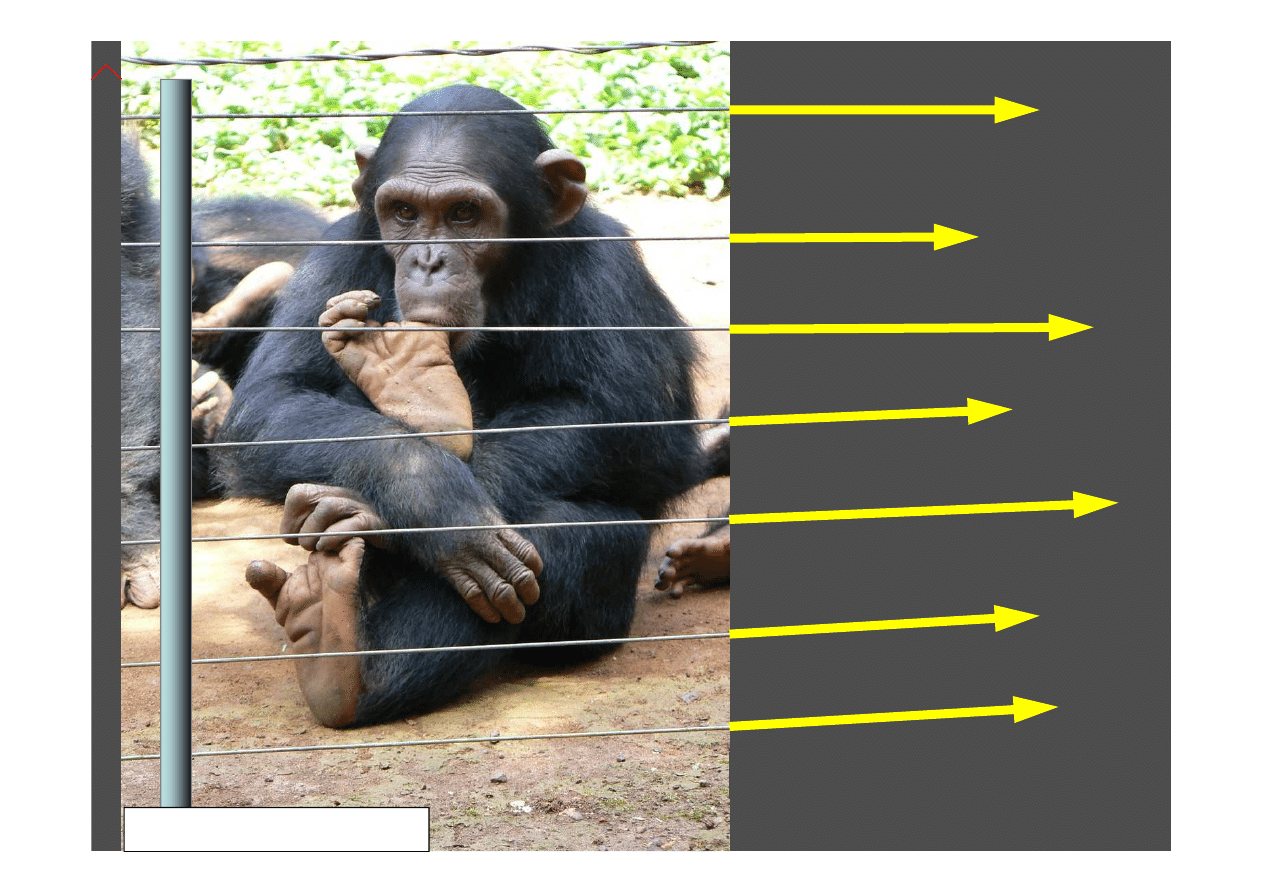
Uk
ł
ad si
ł
w przewodach
Prawie
równoległy
fot. Justyna Laskowska
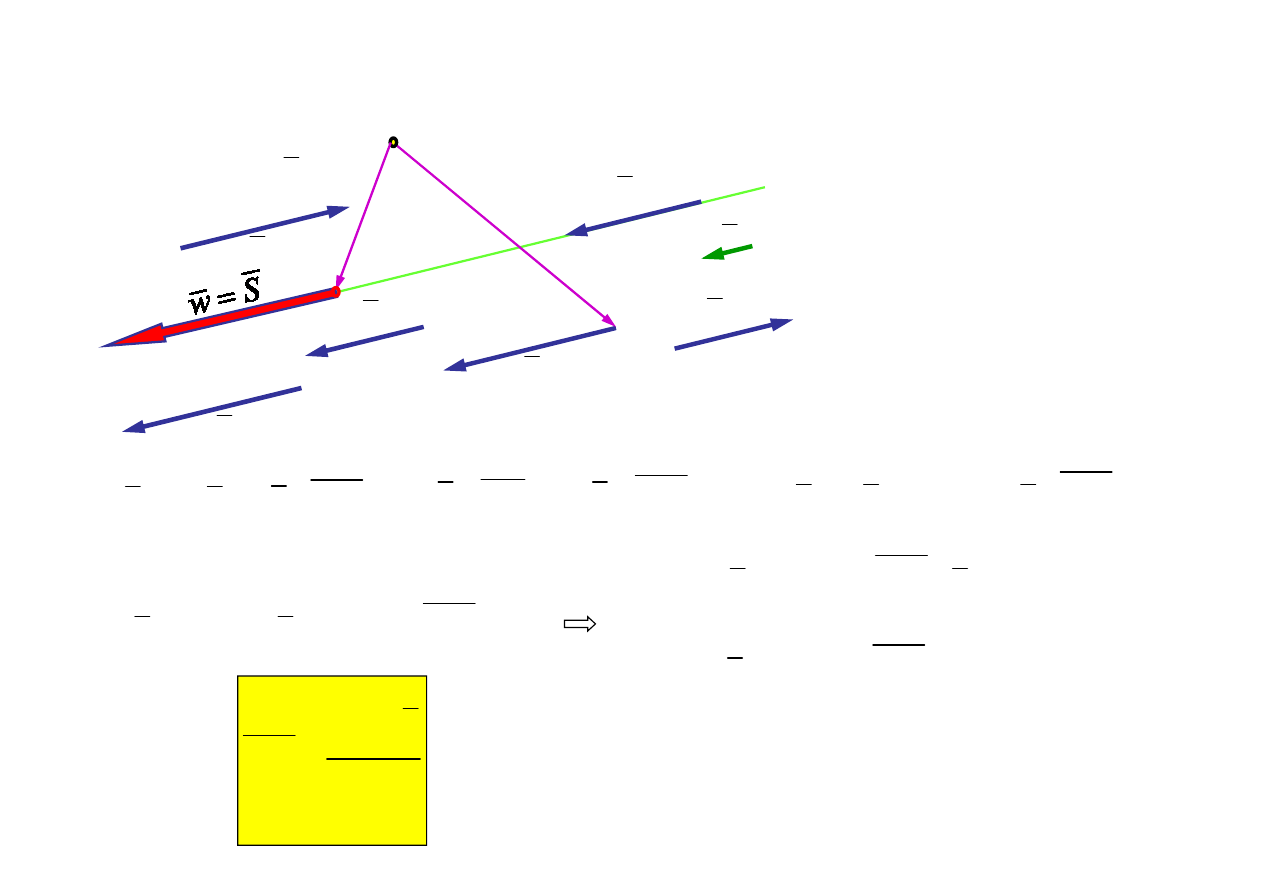
1.3. Środek równoleg
ł
ego uk
ł
adu si
ł
F
1
F
2
F
3
i
F
F
4
n
F
e
A
1
A
2
A
3
i
A
n
A
A
4
r
1
O
*
O
O
– sta
ł
y punkt odniesienia
e
– wersor równoleg
ł
ego
uk
ł
adu si
ł
F
i
– miara si
ł
y
F
i
na
kierunku e
6
F
2
*
O*
O
M
M
S
OO
=
+ ×
n
n
*
i
i
i
i
i
F
A O
F
OO
=
=
=
×
+
×
∑
∑
1
1
( )
n
n
*
i
i
i
i
i
F e
r
F
e OO
=
=
=
⋅ × − +
⋅ ×
=
∑
∑
1
1
0
n
n
*
i
i
i
i
e
F r
F
OO
=
=
× −
⋅ +
⋅
=
∑
∑
1
1
0
n
n
*
i
i
i
i
n
n
*
i
i
i
i
F r
F
OO
e
F r
F
OO
=
=
=
=
−
⋅ +
⋅
−
⋅ +
⋅
=
∑
∑
∑
∑
1
1
1
1
0
n
i
*
i
n
i
i
F r
OO
F
=
=
⋅
=
∑
∑
1
1
OO
*
– wektor określający po
ł
ożenie
środka równoleg
ł
ego uk
ł
adu si
ł

W
ł
asności środka równoleg
ł
ego uk
ł
adu si
ł
Uk
ł
ad posiadający środek redukuje się w tym punkcie do wypadkowej
7
Moment uk
ł
adu względem środka jest równy 0
Jeżeli w równoleg
ł
ym uk
ł
adzie si
ł
, posiadającym środek, obrócimy si
ł
y wokó
ł
ich
punktów zaczepienia o ten sam kąt to środek uk
ł
adu nie zmieni swojego po
ł
ożenia
Wyszukiwarka
Podobne podstrony:
MT st w 04 cz2 [tryb zgodno┼Ťci]
MT st w 04 cz1 [tryb zgodności]
MT st w 04 cz1 [tryb zgodno┼Ťci]
MT st w 08 09 [tryb zgodno┼Ťci]
04 CPM [tryb zgodnosci]id 4991 Nieznany (2)
6 niestacj uzupełnienie2014 04 24 [tryb zgodności]
WYKúAD 04 organizing [tryb zgodnoÂci]
MT st w 06 [tryb zgodności]
MT st w 08 [tryb zgodności]
MT st w 05 [tryb zgodności]
MT st w 07 [tryb zgodności]
MT st w 03 [tryb zgodno┼Ťci]
MT st w 02a [tryb zgodno┼Ťci]
MT st w 02 [tryb zgodno┼Ťci]
MT st w 10 [tryb zgodności]
więcej podobnych podstron