Statyka
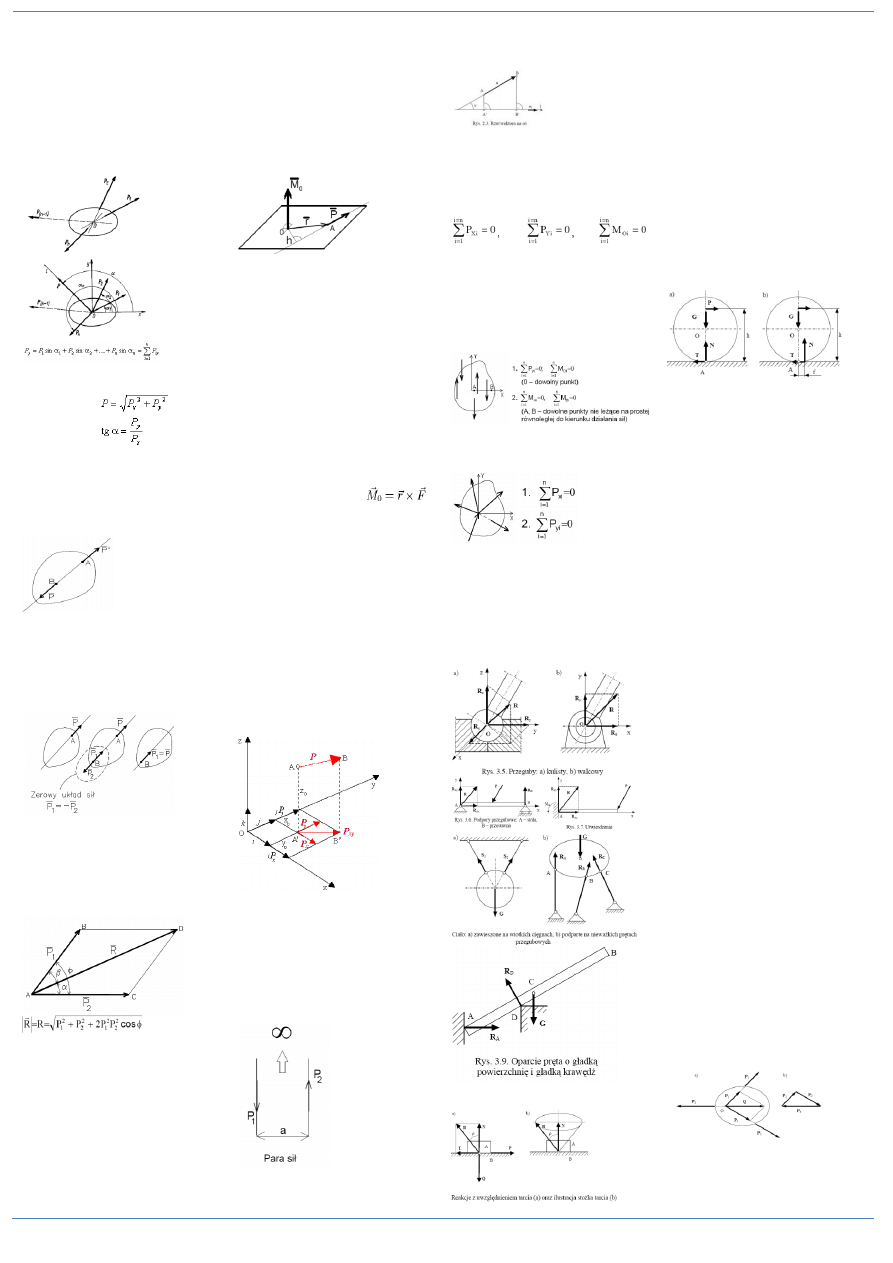
1.Siła, układy sił
-
SIŁA
-jest wielkością wektorową miarą
oddziaływao fizycznych między ciałami.
Jednostką siły w układzie SI jest niuton
[N]. F=ma.
-
UKŁADY SIŁ
- w których linie działania
przecinają się w jednym punkcie
nazywamy zbieżnymi układami sił. Takie
układy mogą byd płaskie lub
przestrzenne.
Wartośd liczbową wypadkowej P i kąt a,
który tworzy ona z osią Ox, wyznaczamy
ze wzorów:
2.Aksjomaty statyki
a)
Dwie siły przyłożone do ciała
sztywnego równoważą się
tylko wtedy, gdy działają wzdłuż jednej
prostej, są przeciwnie skierowane i mają
te same wartości liczbowe.
b)
Działanie układu sił przyłożonych do
ciała sztywnego nie
ulegnie zmianie, gdy do tego układu
zostanie dodany lub
odjęty dowolny układ równoważących
się sił (tzw. układ
zerowy)
c)(równoległobok)
Dowolne dwie siły P1
i P2 przyłożone do jednego punktu,
można zastąpid siłą wypadkową R
przyłożoną do tego punktu i
przedstawioną jako wektor będący
przekątną równoległoboku ABCD
zbudowanego na wektorach sił.
d)
(działania i przeciwdziałania)
Każdemu działaniu towarzyszy równe co
do wartości i przeciwnie skierowane
wzdłuż tej samej prostej
przeciwdziałanie. odpowiada trzeciemu
prawu Newtona, sformułowanemu nie
dla punktu materialnego, ale dla
dowolnego ciała materialnego.
e)
(zasada zesztywnienia)
Równowaga
sił działających na ciało odkształcalne nie
zostanie naruszona przez zesztywnienie
tego ciała
f)(zasada oswobodzenia od więzów)
Każde ciało nieswobodne można
myślowo oswobodzid od
więzów, zastępując przy tym ich
działanie odpowiednimi
reakcjami. Dalej ciało to można
rozpatrywad jako ciało swobodne,
podlegające działaniu sił czynnych
(obciążeo) oraz sił biernych (reakcji).
3.Moment siły względem punktu
Moment siły P względem punktu 0 to
wektor, którego wartośd bezwzględna
równa jest iloczynowi wartości liczbowej
siły P i ramienia tej siły względem
punktu 0. Wektorowo: M
o
=r×p
Moment siły względem punktu jest
równy zeru, gdy:
a)
siła jest równa zeru,
b)
linia działania siły przechodzi przez
dany punkt (ramię=0).
4.Moment siły względem osi
-
Moment siły
(moment obrotowy) - siły
względem punktu O jest iloczyn
wektorowy promienia wodzącego , o
początku w punkcie O i koocu w punkcie
przyłożenia siły oraz siły :
Na podstawie tej interpretacji moment
siły względem osi Oz można określid
jako moment rzutu siły P na płaszczyznę
prostopadłą do osi Oz względem punktu
przebicia tej płaszczyzny przez os. Rzut
siły P na płaszczyznę prostopadłą do osi
oznaczony jest przez P
xy
, a punkt
przebicia płaszczyzny O
xy
przez os Oz
oznaczony symbolem O.
Z powyższego określenia momentu siły
względem osi wynika, że moment siły
względem osi jest zerem, gdy siła i oś
leżą w jednej płaszczyźnie (gdy siła jest
równoległa do osi lub gdy prosta
działania siły przecina oś).
5.Para sił
Układ dwóch sił równoległych,
skierowanych w przeciwnych
kierunkach, o równych modułach.
Siły tworzące parę nie mają wypadkowej
(P1 = P2),ale i nie równoważące się, gdyż
nie działają wzdłuż jednego kierunku –
nie są zerowym układem sił.
Niezrównoważona para sił działając
na ciało sztywne powoduje jego obrót.
6.Rzut siły na oś
Rzutem siły na oś nazywamy wektor
łączący rzut początku z rzutem kooca
wektora danej siły na oś.
7.Warunki równowagi płaskiego układu
sił
Aby dowolny płaski układ sił był w
równowadze(nie wywoływał ruchu),
wektor główny oraz moment główny
tego układu muszą byd równe zeru.
-punkty A, B i C nie mogą leżed na jednej
prostej.
-dowolna oś X nie może byd prostopadła
do prostej łączącej punkty A i B.
8.Warunki równowagi układu sił
równoległych
9.Warunki równowagi zbieżnego
układu sił
10.Więzy
przegub kulisty, przegub walcowy,
podpora przegubowa stała, podpora
przegubowa przesuwna, utwierdzenie,
zawieszenie na wiotkich cięgnach,
podparcie na prętach przegubowych,
oparcie o gładką powierzchnię.
11.Tarcie ślizgowe, tarcie toczenia
Graniczna wartośd siły tarcia zależy od
wielu czynników, nie wszystkie z nich są
rozpoznane w zadowalającym stopniu.
Do celów praktycznych wykorzystujemy,
sformułowane przez Coulomba na
podstawie doświadczeo, prawa tarcia.
Są one następujące:
a)
Siła tarcia jest niezależna od wielkości
stykających się ze sobą powierzchni i
zależy od ich rodzaju.
b)
Wartośd siły tarcia ciała znajdującego
się w spoczynku może się zmieniad od
zera do wartości granicznej, wprost
proporcjonalnej do nacisku normalnego.
c)
Gdy ciało ślizga się po pewnej
powierzchni, siła tarcia jest skierowana
przeciwnie do kierunku ruchu i jest
mniejsza od wartości granicznej.
Tarcie toczenia
Zjawisko oporu toczenia jest
spowodowane odkształcaniem się
zarówno walca, jak i płaszczyzny, na
której on spoczywa. Wtedy styk walca i
płaszczyzny nie odbywa się wzdłuż
tworzącej przechodzącej przez punkt A,
lecz na ograniczonej powierzchni
wynikającej ze wzajemnych odkształceo
w miejscu styku walca i powierzchni.
Reakcja normalna N jest wtedy
wypadkową nacisków normalnych
występujących na płaszczyźnie styku i
działających na walec i jest przesunięta o
pewną odległośd w stosunku do punktu
A w kierunku możliwego toczenia się.
11.Warunki statycznej wyznaczalności i
geometrycznej niezmienności układu
Układ jest
statycznie nie wyznaczalny
jeżeli jest podparty na większej liczbie
podpór i nie posiada żadnego przegubu.
-
BELKA
-
n
s
=r-3-p
r- liczba reakcji podporowych
3- liczba równao na płaszczyźnie(3D- 6)
p- liczba przegubów
-
RAMA
-
n
s
=r+3z-p-3
r- liczba reakcji podporowych
z- ilośd obwodów zamkniętych
p- liczba przegubów
-
KRATOWNICA
-
n
s
=p+r-2w
p- liczba prętów
r- liczba reakcji podporowych
w- liczna więzów
Geometryczna nie zmiennośd
, belka nie
może ulegad zmianą bez zmiany
poszczególnych elementów (w przęśle
nie może byd więcej niż 2 przeguby jeżeli
przęsło jest podparte na podporach
przesuwnych)
12. Zasada trzech sił
Jeżeli ciało sztywne jest w równowadze
pod działaniem trzech nierównoległych
sił leżących w jednej płaszczyźnie, to
linie działania tych sił muszą przecinad
się w jednym punkcie, a siły tworzyd
trójkąt zamknięty.
Wyszukiwarka
Podobne podstrony:
dokumenty word Sciąga mechanika
Ściąga mechanika gruntów
ściąga mechanika płynów
ściaga mechanika
ściąga mechanika 3
ściąga mechanika płynów 2
sciaga 4 mechanika, Zaawansowane materiały i nanotechnologia UJ, Fizyka, Mechanika
Ściąga Z Mechaniki, Studia - Budownictwo, Mechanika ogólna
Sciąga mechanika gruntów
ściąga mechanika
mechanika, sciaga mechana(2), 1 zasada dynamiki-jeśli na ciało nie działa żadna siła lub siły działa
ŚCIĄGI, Sciaga 1, Mechanika płynów - część mechaniki teoretycznej, zajmuje się badaniem ruchu płynów
ŚCIĄGA Z MECHANIKI GRUNTÓW, AGH-materiały, TPEZ Technika Podziemnej Eksploatacji Złóż
ściąga mechana
ściąga mechana
ściąga mechana
OSN ściąga, Mechanika i Budowa Maszyn, sem. 6, Obrabiarki CNC, Zaliczenie
więcej podobnych podstron