Um einen PC für den Anschluß eines CAN-
Busses vorzubereiten, soll eine der vorhan-
denen Schnittstellen genutzt werden.
Dadurch erübrigt sich eine spezielle I/O-Ein-
steckkarte, so dass die Schaltung auch an
Notebooks arbeiten kann. Obwohl
durchaus praktikabel, haben wir uns
gegen die serielle Schnittstelle ent-
schieden, denn nur die Parallel-
schnittstelle erlaubt es, die hohe
Übertragungsrate eines CAN-Bus-
Systems auszunutzen. Da über das
Interface nicht nur Daten gesendet,
sondern auch empfangen werden
sollen, muß die Parallelschnitt-
stelle für bidirektionalen Daten-
verkehr eingestellt sein. Dies
geschieht bei Einsteckkarten
über Jumper auf der Platine
oder bei modernen Pentium-
Boards über das BIOS-Setup
(EPP-Modus). Auch Uralt-PCs
kommen zu neuen Ehren, wenn
diese mit kostengünstigen bidirek-
tionalen Schnittstellenkarten aus
dem Handel nachgerüstet werden.
Hardware
Die Schaltung ähnelt der in Elektor
11/99 vorgestellten Interface-Schal-
tung für Mikrocontroller wie ein Ei
dem anderen, so dass die Beschrei-
bung der Hardware und ihres Auf-
baus entsprechend knapp ausfallen
kann. Der Hauptunterschied zwi-
schen beiden Schaltungen liegt
natürlich in der Software.
Als CAN-Bus-Controller arbeitet wie-
derum ein SJA1000 (wer noch einen
MIKROPROZESSOREN
58
Elektor
6/2000
CAN-Bus-Interface
für PC
Mit neuer Software
Entwurf von Reiner Lock
Die Möglichkeiten eines CAN-Bus-Systems steigen mit der Zahl
unterschiedlicher Geräte, die am Bus betrieben werden können.
Mit dem hier vorgestellten Interface kann jeder PC an einen
CAN-Bus angeschlossen werden.
ledge (Pin 10) als Interruptquelle für den
SJA1000 genutzt wird.
Durch die galvanische Trennung des CAN-
Busses wird die Einkopplung von Störspan-
nungen in beide Richtungen erschwert,
außerdem ergibt sich ein beruhigender
Schutz des PCs vor Überspannungen auf dem
CAN-Bus. Wer eine kostengünstige Lösung
sucht und auf die galvanische Trennung ver-
zichten möchte, kann einfach den DC/DC-
Wandler weglassen und +5 V und Masse
zwischen Primär- und Sekundärseite über-
brücken.
Mit Jumper JP1 kann der Abschlußwider-
stand von 120
Ω zugeschaltet werden.
Grundsätzlich sollen die Abschlußwider-
stände nur an den Enden der CAN-Bus-Linie
angeschlossen werden. Wenn in einem
System einzelne Busteilnehmer häufig an-
und wieder abgekoppelt werden, ist es bes-
ser, wenn die Abschlußwiderstände auf der
Platine nicht benutzt und statt dessen Sub-
D-Stecker mit eingelötetem 120-
Ω-Wider-
stand als Busabschluß verwendet werden.
Die Verdrahtung der 9-poligen Sub-D-Verbin-
der ist in der CAN-Norm nicht festgelegt. So
wurde gegenüber früheren Elektor-Veröffent-
lichungen zum Thema CAN-Bus nicht nur die
Anschlüsse 7 und 2 vertauscht, sondern auch
mit dem Grundsatz gebrochen, daß der CAN-
PCA82C200 in Reserve hat, kann
auch diesen Controller verwenden),
der im Novemberheft ausführlich
beschrieben wurde. Das vollständige
Datenblatt kann man von
www.semiconductors.philips.com
herunterladen. Der Spannungsteiler
R14/R15 ist eigentlich nur beim
PCA82C200 nötig, schadet dem
SJA1000 aber nicht. Besser ist es
aber, R14 wegzulassen und R15
durch eine Drahtbrücke zu ersetzen,
so dass der RX1-Anschluß fest auf
Masse liegt. Die Software muss den
internen Komparator CBP aus- und
damit den internen Schmitt-Trigger
des SJA1000 einschalten. Dazu
schreibt man in das Register OCR
den Wert 1A
HEX
und setzt Bit 6 im
Register CDR.
Der SJA1000 wurde mit seinen
Schreib- und Leseleitungen für den
direkten Anschluß an Mikrocontrol-
lersysteme entwickelt. Die Schreib-
und Leseleitungen müssen deshalb
entsprechend dem Chip-Timing per
Software bedient werden. Das Daten-
register der parallelen Schnittstelle
(Pin 2...9 von K3) wird direkt mit dem
gemultiplexten Daten/Adreßbus des
CAN-Controllers verbunden. Der
Lese/Schreibbefehl und ALE gelan-
gen über drei Centronics-Steuerlei-
tungen (Autofeed, Init Printer, Select
Input) zum Controller, während von
den Statusregistern nur Acknow-
MIKROPROZESSOREN
59
6/2000
Elektor
Technische Daten
– Interface für parallele Schnittstelle im bidirektionalen EPP—Modus
– CAN-Bus-Anschluß über gebrückte 9-polige Sub-D-Verbinder
– Abschlußwiderstand 120
Ω zuschaltbar
– CAN-Controller SJA1000 oder PCA82C200
– Busankopplung über Transceiver PCA82C250
– Galvanische Trennung durch Optokoppler und Gleichspannungswandler
– Stromversorgung 9...12 V über Steckernetzteil
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
K3
K1
1
2
3
4
5
6
7
8
9
K2
1
2
3
4
5
6
7
8
9
7805
IC6
6N137
IC2
OUT
NC
EN
AN
CA
NC
2
7
8
5
6
3
1
4
82C250
IC4
CANH
CANL
VREF
TXD
RXD
PCA
RS
5
6
3
2
1
4
7
8
C4
100n
C11
100n
C10
100n
C9
100n
C3
10µ
25V
C8
1µ 10V
C7
100µ 10V
0505SA
IC5
VIN
NMV
V+
0
7
2
5
1
C1
22p
C2
22p
X1
16MHz
8x 4k7
1
2
3
4
5
6
7
8
9
R26
R25
4x 4k7
1
5
4
3
2
R2
390Ω
R11
390Ω
R12
390Ω
R10
390Ω
C5
470µ
25V
C6
220µ
10V
R16
56k
R14
10k
R15
10k
R17
390
Ω
R21
390
Ω
R13
4k7
R24
120
Ω
R22
5Ω6
R23
5Ω6
R20
10k
R19
390
Ω
R18
390
Ω
D1
12V
D2
12V
JP1
R1
390Ω
R3
390Ω
R4
390Ω
R5
390Ω
R6
390Ω
R7
390Ω
R8
390Ω
R9
390Ω
13
12
1
IC7f
D3
1N4004
SJA1000
CLKOUT
XTAL1
XTAL2
IC1
MODE
ALE
AD7
TX0
RX0
AD6
AD5
AD4
AD3
AD2
AD1
AD0
INT
RST
TX1
RX1
RD
WR
CS
13
22
21
18
15
12
19
28
27
26
25
24
23
16
17
11
14
20
10
8
2
1
1
2
3
2
3
1
6
5
4
3
7
9
PCA82C200
1
2
1
IC7a
3
4
1
IC7b
5
6
1
IC7c
9
8
1
IC7d
11
10
1
IC7e
5V
5V
5V
5V
6N137
IC3
OUT
NC
EN
AN
CA
NC
2
7
8
5
6
3
1
4
5V
5V
5V
5V
5V
IC7
14
7
IC7 = 7404
U
b
U
b
U
b
U
b
9V
000039 - 11
5V
50mA
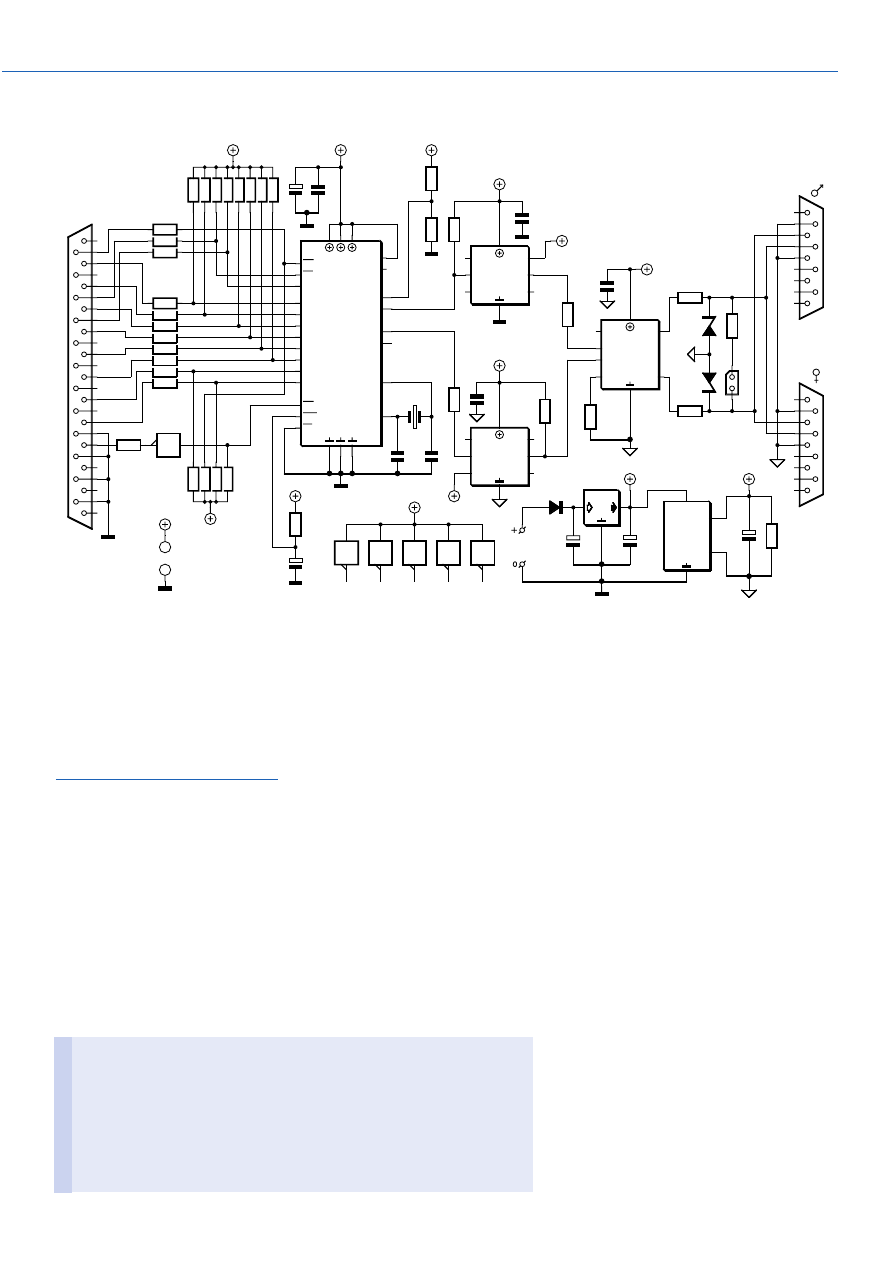
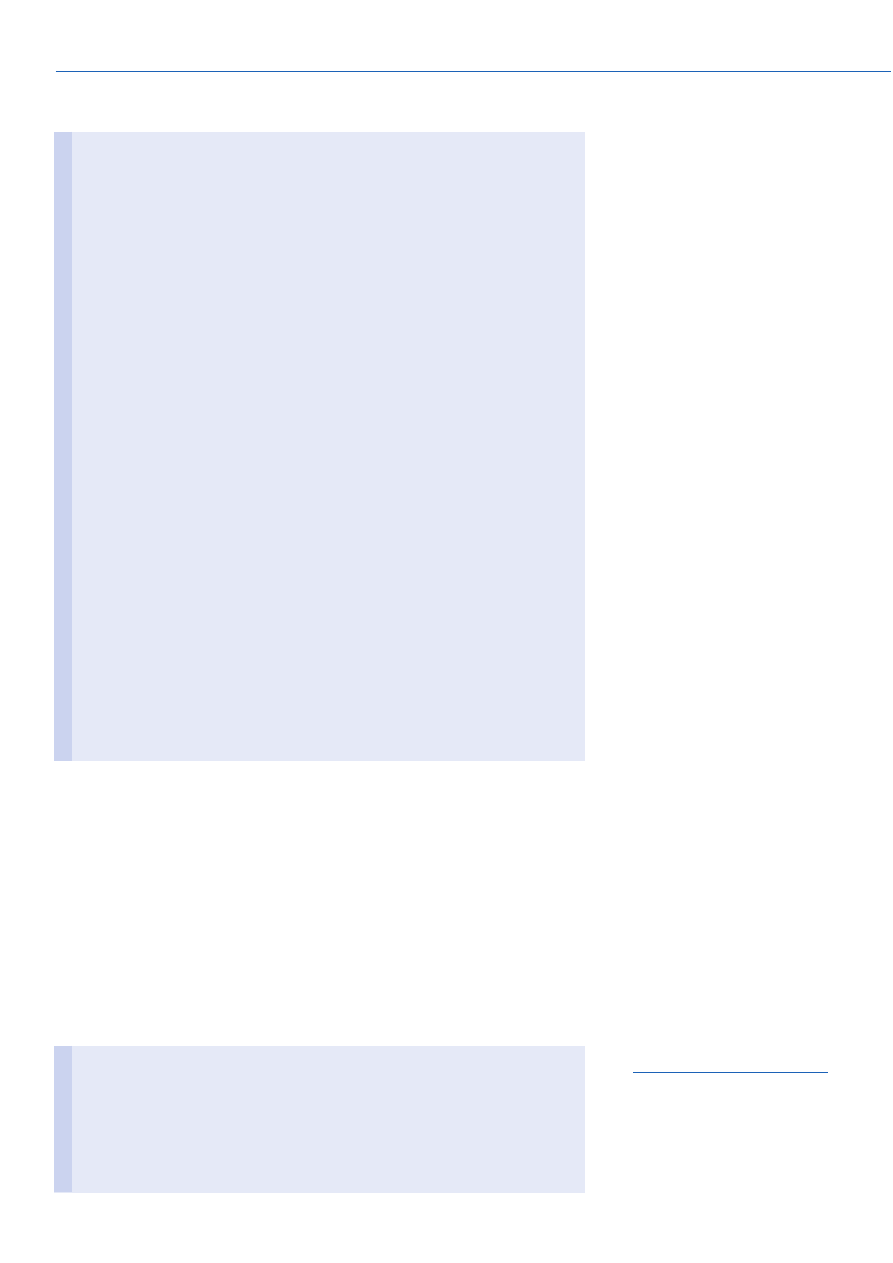
Bild 1. Die Schaltung des CAN-Bus-Interface zur parallelen PC-Schnittstelle.
Bus in beide Richtungen gleich ist. Statt des-
sen wird eine männliche und eine weibliche
Buchse eingesetzt, so dass die Interface-Pla-
tine aus dem Bus entfernt werden und die
beiden Buskabel einfach ineinander gesteckt
werden können. Bedenken Sie, das die Num-
merierung eines Male- und eines Female-Ver-
binders gespiegelt sind.
Software
Zum PC-Interface gehört ein DOS-Programm,
mit dem das Interface in Betrieb genommen
werden kann. Das Programm und sein Quell-
kode ist auf Diskette 006004-1 erhält-
lich. Bevor das Programm gestartet
wird, muß das Interface mit der
Druckerschnittstelle und mit einer
Versorgungsspannung von 9...12 V
verbunden werden. Eine Verbindung
zum CAN-Bus ist zu diesem Zeit-
punkt noch nicht erforderlich.
Nach dem Programmstart unter DOS
oder im DOS-Fenster gibt man die
Adresse der Druckerschnittstelle an,
anschließend taucht das Programm-
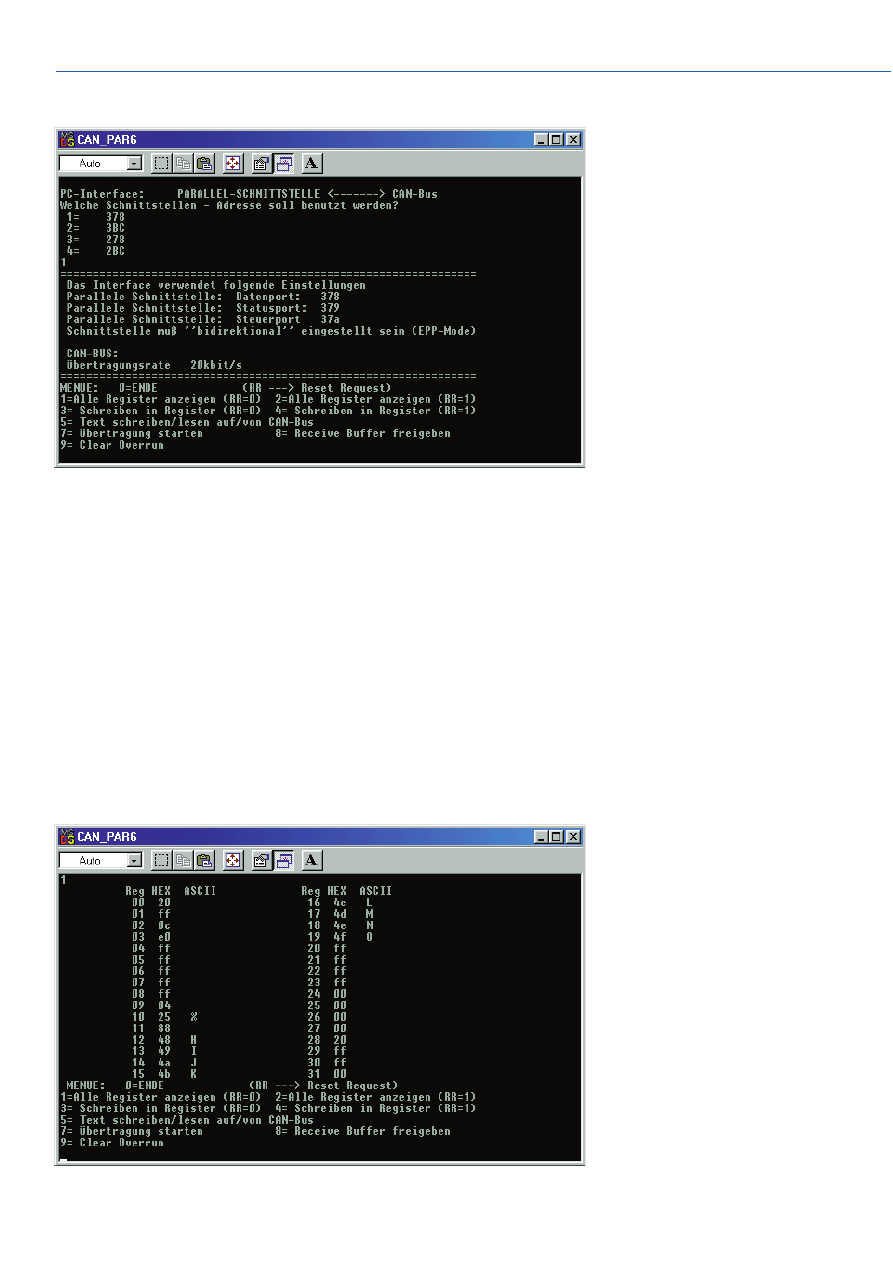
Menü auf. Bei der ersten Menünum-
mer erscheinen drei Spalten wie in
Bild 3. In der ersten Spalte (Reg)
wird die Registeradresse, in der
zweiten und dritten Spalte der Regi-
sterinhalt hexadezimal beziehungs-
weise als ASCII-Zeichen angezeigt.
Sollte sich in allen Registern der
Wert FF oder die Daten 00, 01, 02, 03
und so weiter befinden, dann ist ent-
weder die Schnittstelle falsch adres-
siert oder sie arbeitet nicht bidirek-
tional. Ein Hardware-Reset (Netz-
stecker raus, Netzstecker rein) kann
diesen Makel beheben.
Funktioniert das Interface korrekt, so
lassen sich alle Register mit Aus-
nahme der Register 4..8 lesen. Diese
Register werden erst im Initialisie-
rungsmodus zugänglich, wenn das
Reset-Request-Bit (RR) des Com-
mand Registers auf 1 gesetzt ist. Der
unterschiedliche Zugriff wird durch
zwei verschiedene Schreib- bezie-
hungsweise Lesebefehle im Menü
(RR = 0 oder RR = 1) einfach mög-
lich (siehe Kasten).
Ändern des Identifiers
Der Identifier ist nach Programm-
start auf 300 (00100101100
B
) einge-
stellt. Soll der ID beispielsweise 512
(01000000000
B
) lauten, so müssen
die Bits ID3...ID10 in das Register 10
und die Bits ID0...ID2 in das Register
11 an Bitposition 5...7 geschrieben
werden. Bit 4 repräsentiert das RTR-
Bit und wird bei der Übertragung
eines Datensatzes (Data Frame) auf
0 gesetzt. Die Bits 0...3 legen die
Anzahl der zu übertragenden Bytes
nach der Formel
Anzahl= 8*DLC.3 + 4*DLC.2 +
2*DLC.1 + DLC.0
fest. Sollen acht Byte übertragen
werden, so muß in das Register 11
der Wert 8
D
(00001000
B
) geschrieben
werden. Mit dem Menübefehl 3 wird
also 64
D
in das Register 10 und
anschließend 8
D
in Register 11
geschrieben. Nach DIN ISO 11898
sind die Identifier 2032..2047 reser-
viert und dürfen nicht benutzt wer-
den. Die sieben höchstwertigen Bits
dürfen also nicht gleichzeitig 1 sein.
Ändern der Eingangsfilter
Durch die Eingangsfilterung wird
erreicht, dass nur Datensätze mit
vorher festgelegten Identifiern vom
MIKROPROZESSOREN
60
Elektor
6/2000
Bild 2. Programm-Menü des CAN-Controllers bei Reset Request=0.
Bild 3. Register des CAN-Controllers. Die Register 4...8 sind gesperrt.
benutzt werden. In der Voreinstellung steht
im Acceptance Mask Register (Nummer 5)
255
D
(11111111
B
), so dass alle einkommenden
Nachrichten akzeptiert und übernommen
werden. Das Register kann mit dem Menü-
befehl 4 (RR = 1) verändert werden.
CAN-Bus-Controller übernommen
werden. Berücksichtigt werden nur
die obersten 8 Bit des Identifiers.
Eine Nachricht wird übernommen,
wenn bei jeder Bitposition, bei der
im Acceptance Mask Register eine 0
steht, eine Übereinstimmung zwi-
schen der zugehörigen Bitposition
im Identifier und im Acceptance
Code Register festgestellt wird. Der
Zugriff auf diese Register, erfolgt,
wenn das RR-Bit vorher auf 1 gesetzt
wurde. Daher muß zum Anzeigen
der Register der Menübefehl 2
MIKROPROZESSOREN
61
6/2000
Elektor
(C) ELEKTOR
000039-1
C1
C2
C3
C4
C5
C6
C7
C8
C9
C10
C11
D1
D2
D3
H1
IC1
IC2
IC3
IC4
IC5
IC6
IC7
JP1
K1
K2
K3
R1
R2
R3
R4
R5
R6
R7
R8
R9
R10
R11
R12
R13
R14
R15
R16
R17
R18
R19
R20
R21
R22
R23
R24
R25
R26
X1
000039-1
0
+
1
(C) ELEKTOR
000039-1
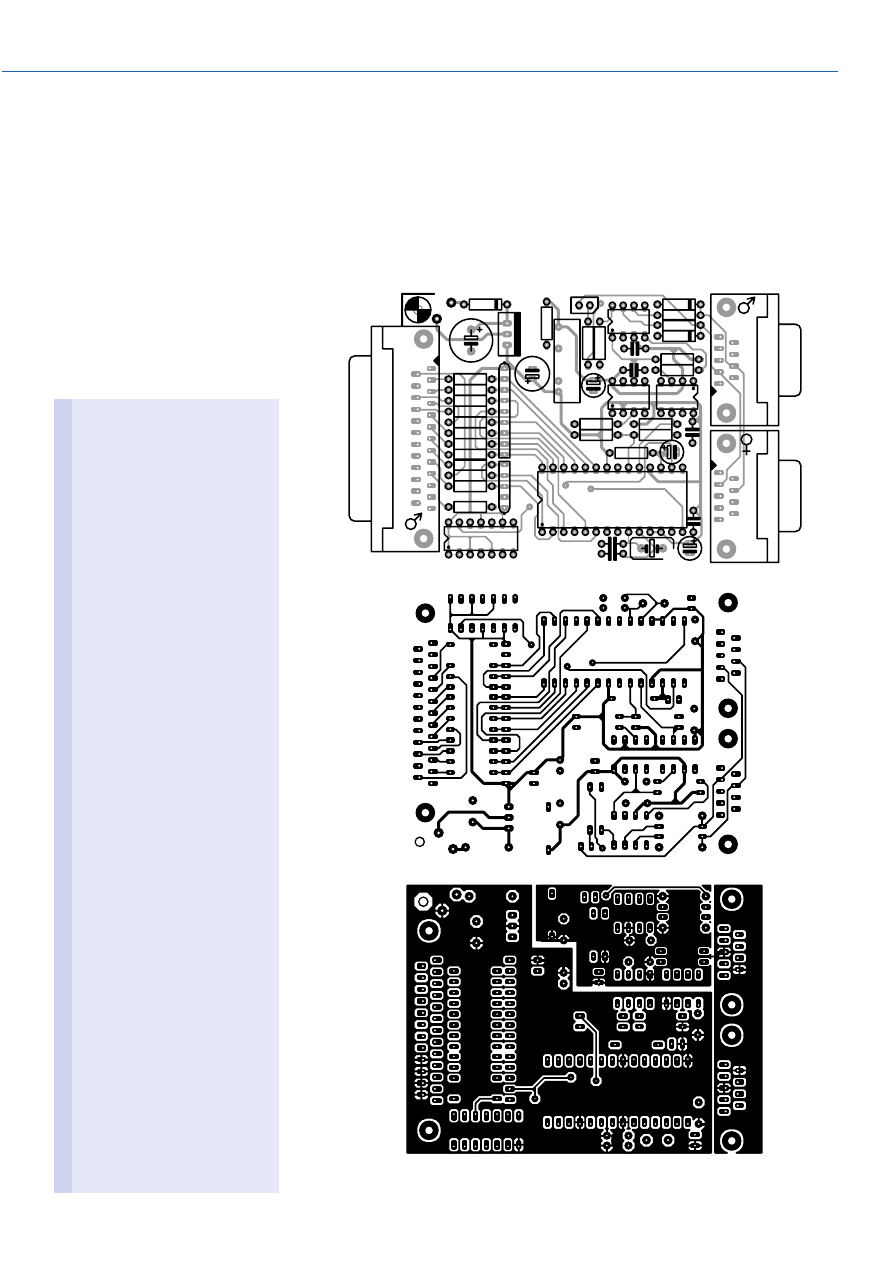
Bild 4. Layout und Bestückungsplan der Interface-Platine.
Stückliste
Widerstände:
R1...R12,R17...R19,R21 = 390
Ω
R13 = 4k7
R14,R15,R20 = 10 k
R16 = 56 k
R22,R23 = 5
Ω6
R24 = 120
Ω
R25 = 4-fach-SIL-
Widerstandsarray 4k7
R26 = 8-fach-SIL-
Widerstandsarray 4k7
Kondensatoren:
C1,C2 = 22 p
C3 = 10
µ/25 V stehend
C4,C9...C11 = 100 n, RM5
C5 = 470
µ/25 V stehend
C6 = 220
µ/10 V stehend
C7 = 100
µ/10 V stehend
C8 = 1
µ/10 V oder MKT R;5
Halbleiter:
D1,D2 = Z-Diode 12 V/400 mW
D3 = 1N4004
IC1 = PCA82C200 oder SJA1000
* (Philips)
IC2,IC3 = 6N137 (u.a. Toshiba)
IC4 = PCA82C250 (Philips)
IC5 = NMV0505SA (Newport, bei
Farnell 589 810)
IC6 = 7805
Außerdem:
JP1 = Jumper
K1 = 9-polige Sub-D-Verbinder für
Platinenmontage, gewinkelt, male
K2 = 9-polige Sub-D-Verbinder für
Platinenmontage, gewinkelt,
female
K3 = 25-polige Sub-D-Verbinder
für Platinenmontage, gewinkelt,
male
2 Lötnägel
X1 = Quarz 16 MHz
Software EPS 006004-1
(DOS-Interface mit C-Quellkode)
Platine EPS 000039-1
CAN-Bus-Anschluss
Nach der erfolgreichen Inbetriebnahme sollte
nun das Interface mit dem CAN-Bus verbun-
den werden. Für die weiteren Schritte muß
sich mindestens ein weiterer Busteilnehmer
am Bus befinden, zum Beispiel ein weiterer
PC.
Auf den Menübefehl Nummer 7 hin wird eine
Datenübertragung ausgelöst, der im Sende-
puffer befindliche Datensatz entsprechend
den Übertragungsparametern auf den Bus
gegeben. Bei der Programminitialisierung
wird bereits eine Buchstabenkombi-
nation in den Sendepuffer geschrie-
ben, die nun bei der Empfangssta-
tion im Empfangspuffer ankommt.
Außerdem zeigt das Statusregister
(Nummer 2) den Empfang einer
Nachricht an, indem es Bit SR.0
setzt. Dieses Bit wird durch den
Menübefehl 8 wieder zurückgesetzt.
Der Controller besitzt einen zwei
Datensätze umfassenden FIFO-Emp-
fangspuffer. Läuft dieser Puffer über,
so wird Bit SR.1 im Statusregister
gesetzt. Menübefehl 9 setzt dieses
Bit wieder zurück.
Eine Art “Fernschreibermodus” bie-
tet der Menübefehl 5. Jedes über die
Tastatur eingegebene Zeichen wird
sofort auf den CAN-Bus übertragen
und erscheint auf allen am PC ange-
schlossenen Empfangsstationen. Um
eine eigene interessante Kommuni-
kation mit diesem Interface aufzu-
bauen, steht das Programm auch als
Quellcode in C zur Verfügung. Wer
das Programm entsprechend abän-
dert, kann auch mit nur einem PC,
zwei Schnittstellenkarten und zwei
Interfaces Experimente am CAN-Bus
durchführen.
Für die Kommunikation mit dem
CAN-Bus-Controller stehen drei
Funktionen zur Verfügung, die als
Treiber sehr einfach in jedes C-Pro-
gramm eingebunden werden kön-
nen.
Mit der Funktion
wr_can(uchar
adr, uchar
wert)
wird das Byte wert in das mit adr
bestimmte Register geschrieben.
Die Funktion
rd_can(uchar adr)
liefert den Inhalt des mit adr fest-
gelegten Registers zurück.
Für die Initialisierung kann die Funk-
tion
initSJA1000()
benutzt werden.
(000039)rg
Literatur
[1] W. Lawrentz (Hrsg.)
CAN System Engineering
1997 Springer Verlag New York
[2] Philips
SJA1000 Stand-alone
CAN controller DATA SHEET
www.semiconductors.philips.com
[3] Bosch
CAN Specification version 2.0
Robert Bosch Gmbh Stuttgart
[4] DIN ISO 11898
DIN, Beuth Verlag Berlin
MIKROPROZESSOREN
62
Elektor
6/2000
Software in C
Mit der Treibersoftware kann man auf alle 32 Steuerregister zugreifen. Über ein kleines
Menü können die einzelnen Register geschrieben, gelesen und somit die gesamte Kommu-
nikation abgewickelt werden. Außerdem besteht unter den Menüpunkten 11...13 die Mög-
lichkeit, für Testzwecke direkt auf die PC-Register der Schnittstelle zuzugreifen. Die PC-
Schnittstelle muß per Jumper oder im BIOS auf bidirektionalen Betrieb im EPP-Modus ein-
gestellt werden. Die Übertragungsrate wird während der Initialisierung auf 1 MBit/s
festgelegt.
Die Treibersoftware besteht im wesentlichen aus drei Funktionen:
1. void init82C200()
Die Funktion initialisiert den CAN-Bus-Controller entsprechend der Hardware-
konfiguration. Die Übertragungsrate ist auf 1 MBit/s eingestellt.
2. void wr_can(uchar adr, uchar wert)
Mit dieser Funktion kann jedes der 32 Controller-Register adressiert und beschrieben
werden.
3. void rd_can(uchar adr)
Mit dieser Funktion kann jedes der 32 Controller-Register adressiert und gelesen werden.
Beispiele:
init82C200();
wird zu Beginn einmal aufgerufen, um die PC-Schnittstelle und den
CAN-Bus-Controller zu initialisieren.
wr_can(12,50);
schreibt den Wert 50 in das Register 12 (1. Byte des Transmissionspuf-
fers).
wr_can(1,10);
Transmission Request. Die Übertragung der Daten aus dem Transmissi-
onspuffer wird gestartet.
wr_can(1,4);
Der Receive-Puffer wird wieder freigegeben
wr_can(0,1);
Reset-Request=1. Einige Register können nur in diesem Modus
beschrieben und angezeigt werden.
wr_can(0,0);
Reset-Request=0. Einige Register können nur in diesem Modus
beschrieben und angezeigt werden.
uinsigned char cw;
cw=rd_can(22);
liest Register 22 (1. Register des Empfangspuffers)
cw=rd_can(2);
liest das Status-Register
Inhalt Diskette 006004-1
CAN_UK6
CPP
C-Quellkode in Englisch
CAN_PAR6
EXE
DOS-Programm in Deutsch
CAN_PAR6
CPP
C-Quellkode in Deutsch
CAN_UK6
EXE
DOS-Programm in Englisch
COPYRI~1
TXT
Copyrighthinweis
CONTENS
TXT
Dieser Text
Wyszukiwarka
Podobne podstrony:
Das TFH CAN Bus Experimentalsystem
Adaptacja sieci CAN BUS do zast Nieznany (2)
CAN Bus Praxis
CAN BUS Sp
CAN Bus Drivers for Atmel C51 Products
I2C Interface fuer Druckerschnittstelle
CAN BUS
(notes) Electronics Interfacing the PC Serial Port (RS232)
Der CAN Bus (2)
Can Bus Komfort, Antrieb, Diagnose
CAN bus
Der CAN Bus (3)
Audi A4 CAN bus wires 2002
ford km tool can bus user manual carsets co uk
579393d1434286492 any interest e60 can bus code hacking 10 e60 voltage supply bus systems
więcej podobnych podstron