
29.05.2012
Sprawozdanie
Cykl 3 temat 1
„Badanie statycznych i dynamicznych właściwości regulatorów PID”
Grupa C5
Grupa ćwiczeniowa 2
Celiński Patryk
Drzewiecki Dominik
Gembicki Jacek
Kozak Marta
Słabik Ewa
Walczak Justyna
Warda Paulina
Wprowadzenie
Regulator PID – przetwarza sygnał wejściowy ε(t) według trzech realizowanych równolegle
operacji dynamicznych:
- wzmocnienia proporcjonalnego ze współczynnikiem k
r
- różniczkowania ze współczynnikiem k
r,
T
d
, (T
d
czas wyprzedzenia)
- całkowania ze współczynnikiem k
r
/T
i
, (T
i
czas zdwojenia)
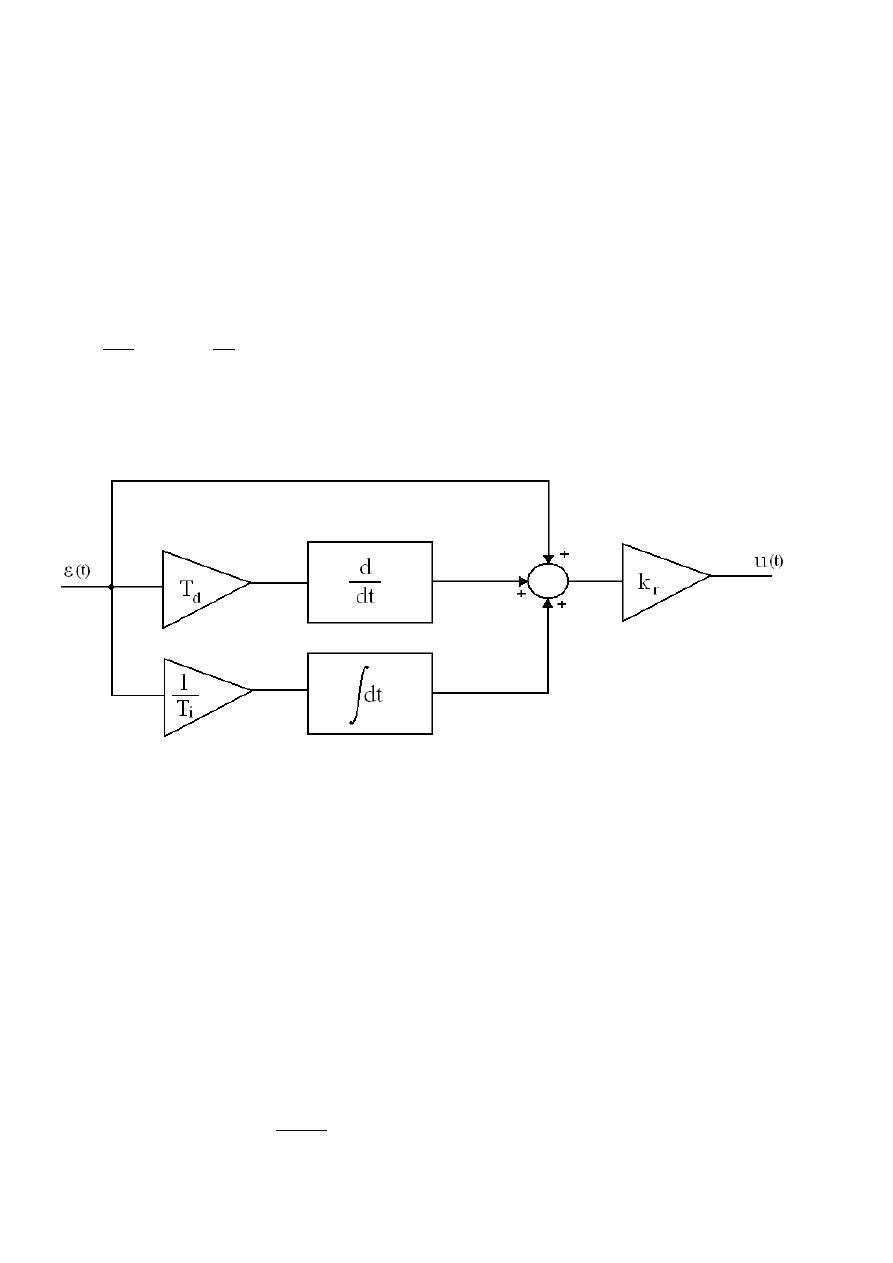
Transmitancja idealnego regulatora PID ma postać:
G(s)=
= Kp (1+
+Tds)
Schemat strukturalny regulatora PID
Celem ćwiczenia było zapoznanie się z budową, zasadą działania, zastosowań i właściwości
regulatorów PID. Korzystano ze stanowiska badawczego regulatora pneumatycznego PID
systemu Pnefal 2. Wartość zadana wynosiła 10 mA i zmieniała się co 0,5 mA do 20 mA.
Sygnał wyjściowy mieścił się w zakresie 4-20 mA.
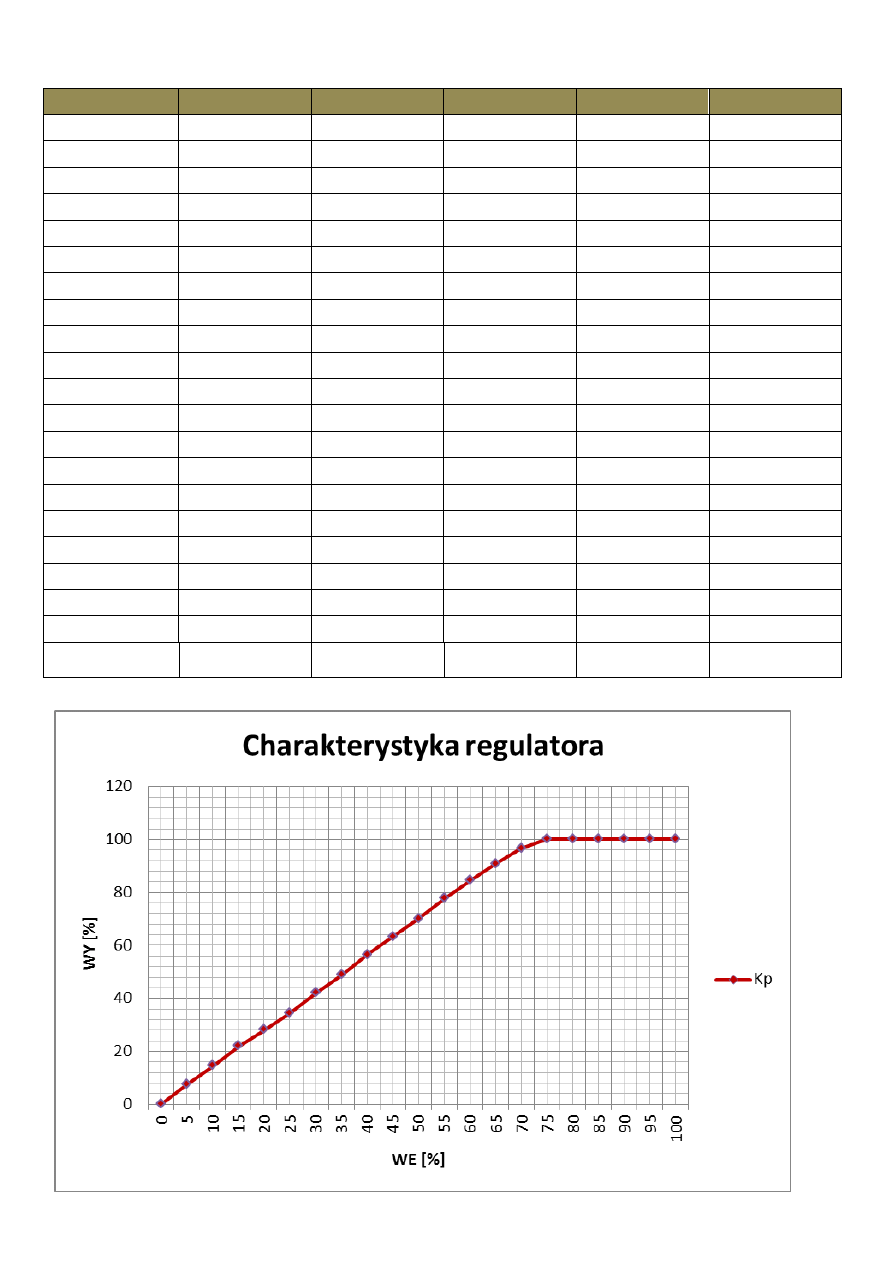
Tabela pomiarów i obliczeń
wejście:10 mA- 20mA
wyjście:4 mA- 20mA
Ti= ∞
Td= 0
e= y – y
0
Kp=
Wejście [mA] %
Wyjście [mA] %
e
Kp
10,0
0
4
0
0
0
10,5
5
5,2
7,5
0,5
1,5
11,0
10
6,3
14,4
1,0
1,44
11,5
15
7,5
21,9
1,5
1,5
12,0
20
8,5
28,1
2,0
1,41
12,5
25
9,5
34,4
2,5
1,4
13,0
30
10,7
41,9
3,0
1,4
13,5
35
11,8
48,8
3,5
1,4
14,0
40
13
56,3
4,0
1,41
14,5
45
14,1
63,1
4,5
1,4
15,0
50
15,2
70,0
5,0
1,4
15,5
55
16,4
77,5
5,5
1,41
16,0
60
17,5
84,4
6,0
1,41
16,5
65
18,5
90,6
6,5
1,4
17,0
70
19,5
96,5
7,0
1,4
17,5
75
20,5
100
7,5
1,3
18,0
80
20,5
100
8,0
1,2
18,5
85
20,5
100
8,5
1,2
19,0
90
20,5
100
9,0
1,1
19,5
95
20,5
100
9,5
1,1
20,0
100
20,5
100
10,0
1

W tym ćwiczeniu zapoznaliśmy się z nastawami regulatora cyfrowego PID oraz
wyznaczaliśmy charakterystyki statyczne regulatora dla współczynnika proporcjonalności. A
następnie badaliśmy zachowanie się regulatora na wymuszenia skokowe dla nastaw
P,PI,PID, co zostało przedstawione na wykresach dołączonych do sprawozdania.
Wnioski:
- W przypadku odpowiedzi skokowej regulatora PI wariant 1 działał przy krótszym czasie
zdwojenia Ti – czyli szybkość działania całkującego regulatora w przypadku 1 była większa.
- W trybie P regulator nie reaguje na odchyłkę e <0
Wyszukiwarka
Podobne podstrony:
Badanie charakterystyk dynamicznych pneumatycznego regulatora typu PID
4 Statyczne i dynamiczne wlasci Nieznany
Laboratorium Automatyki Procesowej C2 Badanie statycznych własności zaworu regulacyjnego
BADANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH REGULATORÓW PID, SGGW Technika Rolnicza i Leśna, Auto
BADANIE WŁAŚCIWOŚCI STATYCZNYCH I DYNAMICZNYCH REGULATORÓW PID 2, SGGW Technika Rolnicza i Leśna, Au
Badanie układu sterowania z regulatorem PID
5. Właściwości statyczne i dynamiczne przetworników pomiarowych, Rok II, Semestr 4, P. T. S. i S
7. Charakterystyki statyczne i dynamiczne regulatorów pneumatycznych, Rok II, Semestr 4, P. T. S. i
Badanie własności dynamicznych regulatorów elektronicznych v2, Lublin1996.03.26
Badanie Dynamiki Ukł Z Regulatorem Cyfrowym
Badanie regulatora PID w układzie sterowania prędkością obrotową silnika prądu stałego
badanie właściwości regulatorów przemysłowych, PWr W9 Energetyka stopień inż, III Semestr, Podstawy
Badanie układu sterowania z regulatorem PID
więcej podobnych podstron