- 1 -
6. MODELE ZACISKOWE UKŁADÓW ELEKTRYCZNCH
6.1.
WIELOBIEGUNNIKI I ICH MODELE MATEMATYCZNE
Wielobiegunnikiem – zgodnie z klasyfikację elementów obwodu elek-
trycznego przeprowadzoną na podstawie kryterium liczby połączeń ele-
mentu z otoczeniem (liczba zacisków, końcówek, biegunów) - nazywamy
element, którego liczba zacisków jest większa od 2 (m>2).
Z każdym zaciskiem wielobiegunnika związana jest para wielkości
elektrycznych: I
k
oraz U
k
)., gdzie k oznacza kolejny numer bieguna (zaci-
sku).
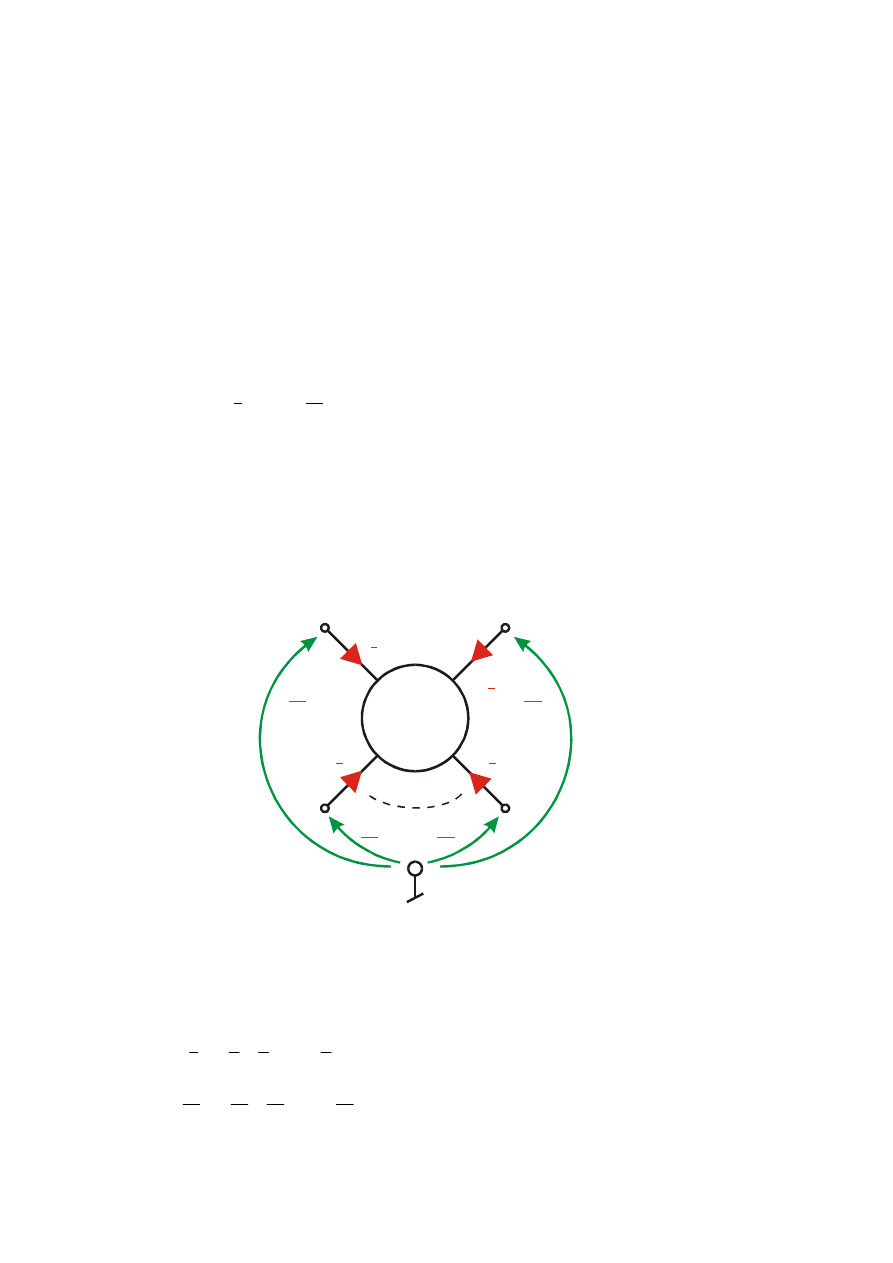
Napięcia zacisków wielobiegunnika odnosimy (określamy) względem
dowolnie wybranego (nieokreślonego - w sensie niezdeterminowanego a
priorii) zacisku odniesienia, usytuowanego w przestrzeni otaczającej wie-
lobiegunnik. Sposób oznaczenia wielkości elektrycznych, zaciskowych m-
biegunnika przedstawia rys.6.1.
m
1
2
m
3
zacisk
odniesienia
I
1
I
2
I
3
I
m
U
1
U
2
U
3
U
m
Rys. 6.1.
Stan elektryczny wielobiegunnika jest jednoznacznie określony jeśli
znane są wektory prądów i napięć zaciskowych definiowane w sposób na-
stępujący:
[
]
T
m
I
I
I
,....,
,
2
1
=
I
-
macierz kolumnowa prądów zaciskowych
(6.1)
[
]
T
m
U
U
U
,....,
,
2
1
=
U
- macierz kolumnowa napięć zaciskowych
(6.2)
- 2 -
Postulat 1.
Prądy zaciskowe każdego wielobiegunnika (traktowanego
jako uogólniony węzeł elektryczny) spełniają – zgodnie z
PPK – równanie:
∑
=
=
=
m
k
k
k
I
1
0
(6.3)
Postulat 2.
W każdym wielobiegunniku LINIOWYM, każdy prąd zaci-
skowy I
k
jest funkcją liniową wszystkich napięć występują-
cych pomiędzy wszystkimi parami zacisków wielobiegun-
nika, a zatem wszystkich napięć zaciskowych Ui dla
i=1,2,...,m:
[ ]
m
k
m
i
i
L
k
U
f
I
,...,
2
,
1
,...,
2
,
1
=
=
=
(6.4)
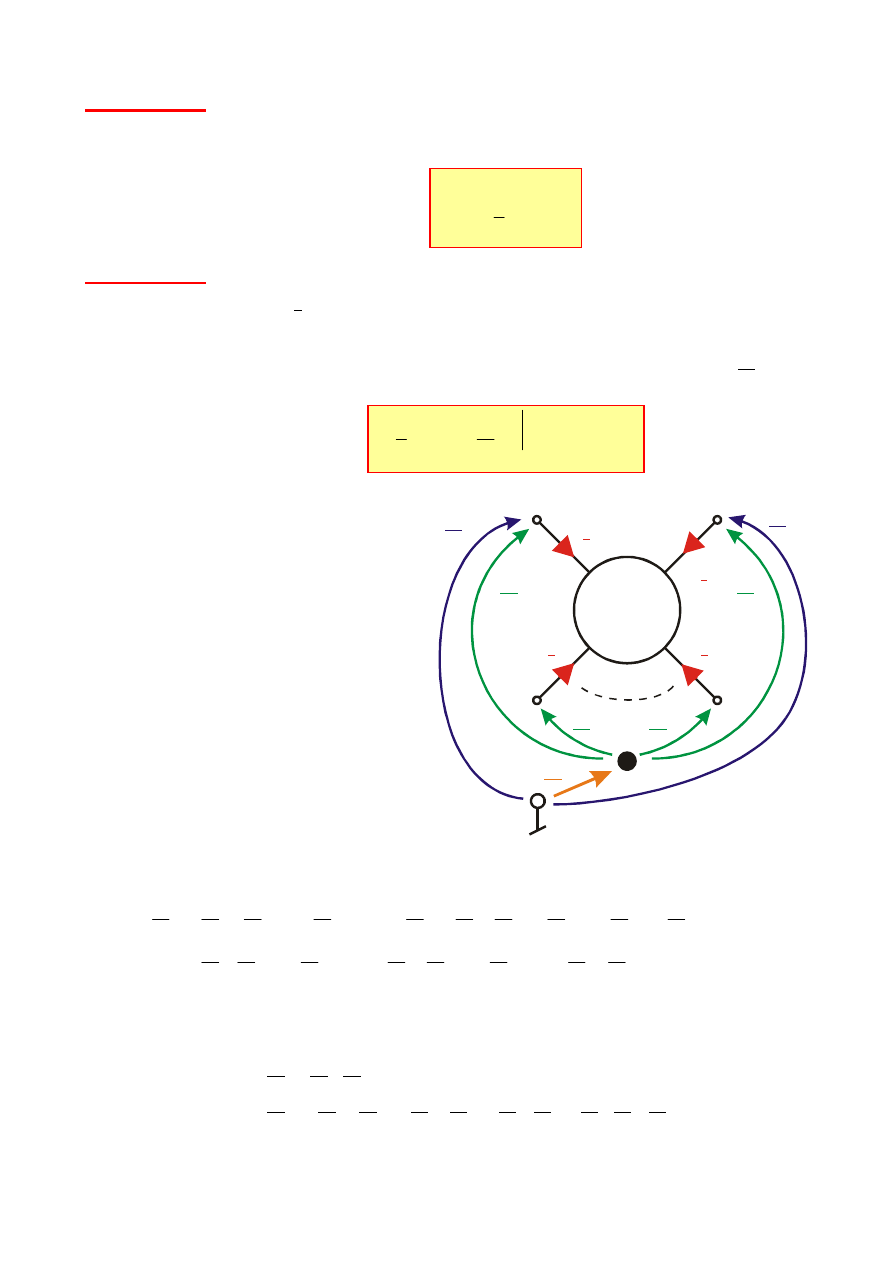
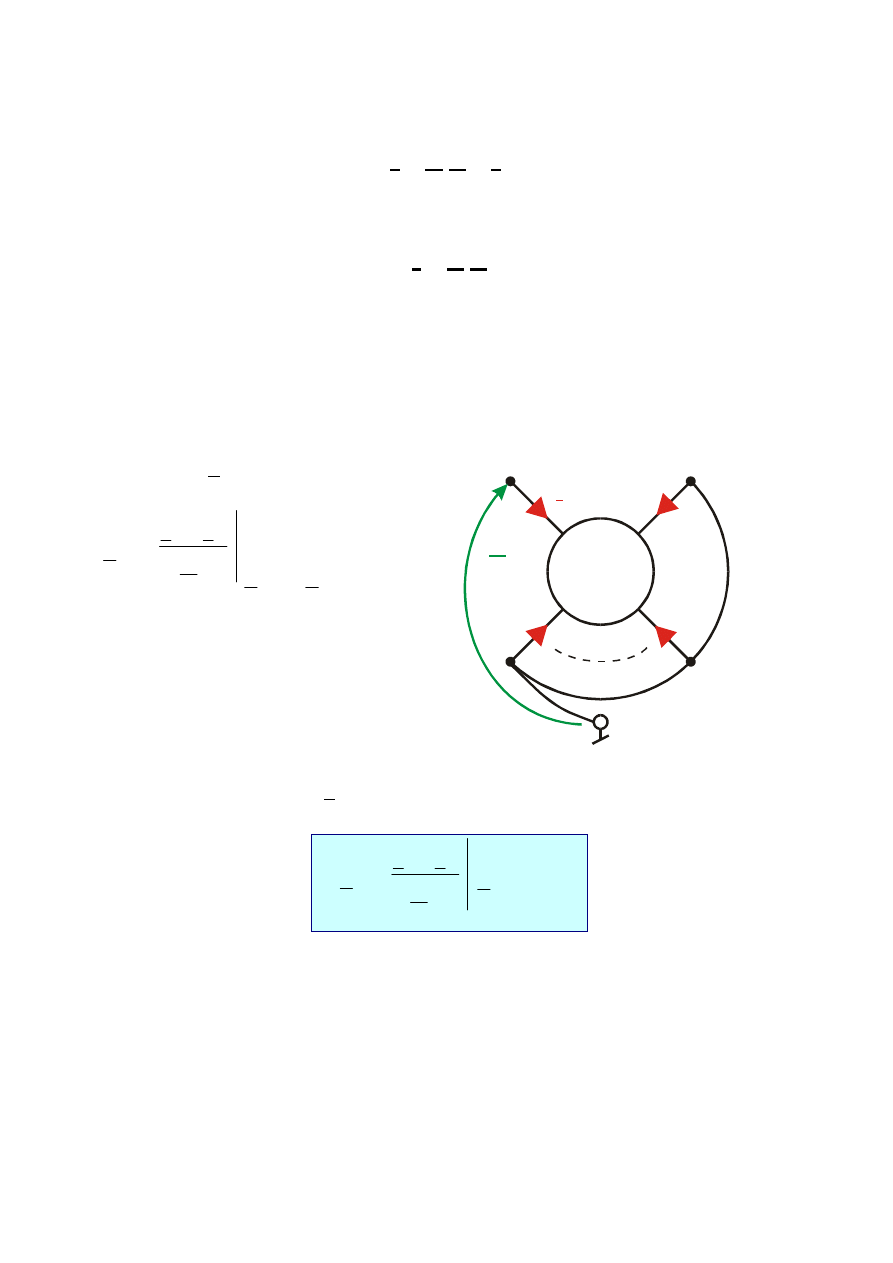
Postulat 2, w którym utożsamio-
no zależność funkcyjną od na-
pięć międzyzaciskowych z za-
leżnością od napięć zacisko-
wych wyjaśnia rys.6.2, na któ-
rym widnieje inny zacisk odnie-
sienia O'.
m
1
2
m
3
I
1
I
2
I
3
I
m
U
1
U
2
U
3
U
m
U
0
O’
U
1
’
U
2
’
Rys. 6.2.
Nowy wektor napięć zaciskowych spełnia zależność:
[
] [
]
[
] [
]
0
0
0
0
2
1
0
0
2
0
1
2
1
,...,
,
,...,
,
,...,
,
'
,...,
'
,
'
'
U
U
U
+
=
+
=
=
+
+
+
=
=
T
T
m
T
m
T
m
U
U
U
U
U
U
U
U
U
U
U
U
U
U
U
Napięcie między dowolną parą zacisków wielobiegunnika (np. między
k oraz l) wyniesie:
wg rys. 6.1.
U
kl
=U
k
-U
l
wg rys. 6.2.
U
kl
’=U
k
’-U
l
’=(U
k
+U
0
)-(U
l
+U
0
)=U
k
-U
l
=U
kl
- 3 -
6.2.
MACIERZ ADMITANCYJNA m-biegunnika
Zakładamy, że wielobiegunnik nie jest układem zdegenerowanym,
tzn. żadna para zacisków nie jest zwarta.
Drugi z postulatów sformułowanych pozwala na przedstawienie
związku (6.4) w postaci m równań algebraicznych linowych:
+
+
+
+
=
⋅
⋅
+
+
+
+
=
+
+
+
+
=
0
2
2
1
1
0
2
2
2
22
1
21
2
0
1
1
2
12
1
11
1
...
...
...
m
m
mm
m
m
m
m
m
m
m
I
U
y
U
y
U
y
I
I
U
y
U
y
U
y
I
I
U
y
U
y
U
y
I
(6.5)
Gdzie prąd I
k
0
nazywany prądem zerowym jest szczególnym przypadkiem
prądu I
k
a mianowicie
0
...
0
2
1
=
=
=
=
≡
m
U
U
U
k
k
I
I
(6.6)
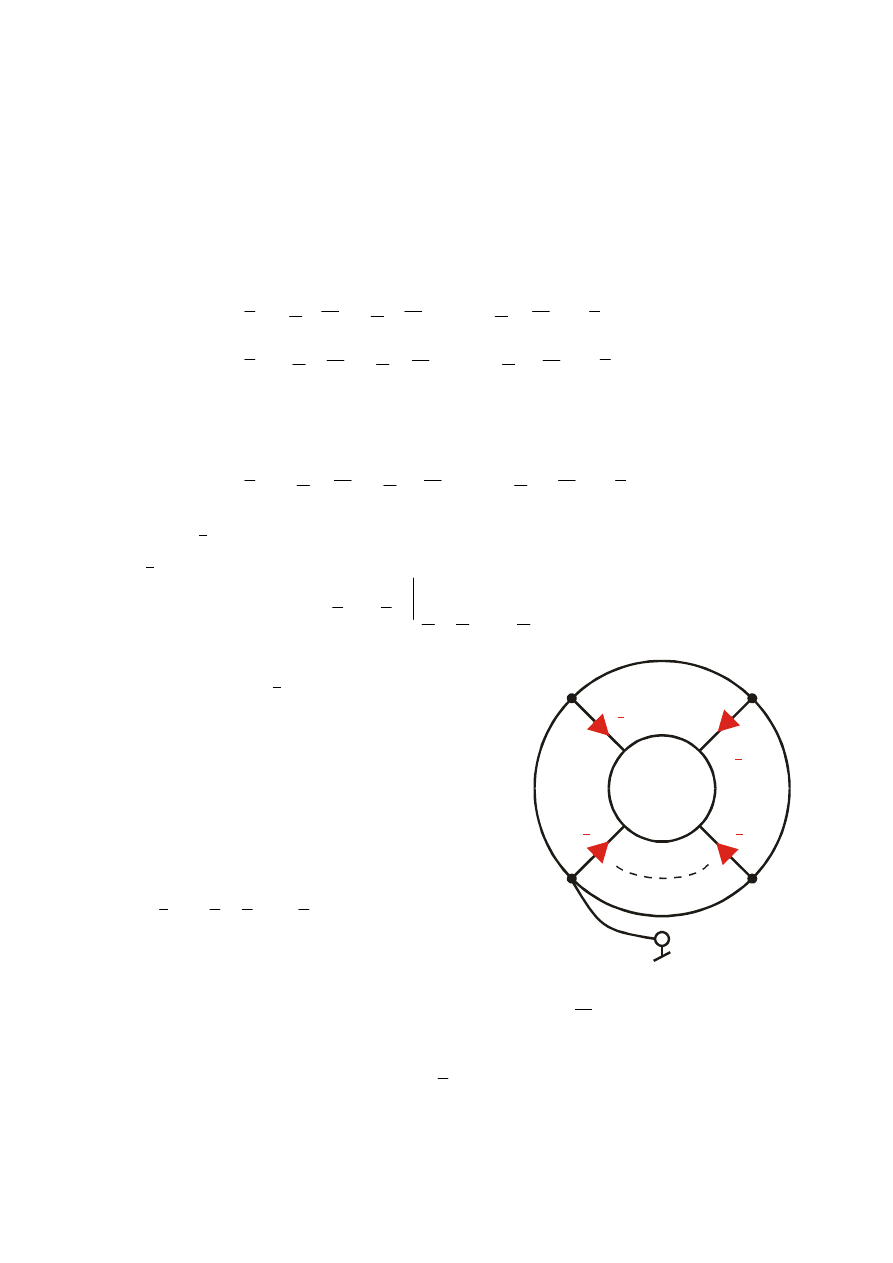
to znaczy, że prąd I
k
0
jest prądem k-tego
zacisku wielobiegunnika, gdy wszystkie
zaciski wielobiegunnika są połączone
bezpośrednio z węzłem odniesienia -
rys.6.3.
Zatem wektor prądów zerowych
[
]
T
m
I
I
I
0
0
2
0
1
0
,...,
,
=
I
(6.7)
posiada, zgodnie z postulatem 1, następu-
jącą właściwość (wynikającą z (6.5), po
m
1
2
m
3
I
1
I
2
I
3
I
m
0
0
0
0
Rys. 6.3.
założeniu zerowych wartości napięć zaciskowych: U
k
=0, k=1,2,...,m):
0
1
0
=
∑
=
=
m
k
k
k
I
(6.8)
- 4 -
Analizując wektor prądów zerowych można wyodrębnić dwa przypadki:
1.
I
0
= 0
(6.9)
Macierz prądów zerowych jest macierzą zerową, tzn. po zwarciu
wszystkich zacisków wielobiegunnika wszystkie prądy zerowe przyj-
mują wartość zerową. Wielobiegunnik spełniający warunek (6.9) na-
zywamy
WIELOBIEGUNNIKIEM
NIEGENERUJ
ĄCYM
.
Oznacza to, że w wewnętrznej strukturze wielobiegunnika nie wy-
stępują nieskompensowane źródła energii i wielobiegunnik zachowuje
się jak układ pasywny.
2.
I
0
≠≠≠≠
0
(6.10)
Macierz prądów zerowych nie jest macierzą zerową, tzn. co naj-
mniej dwa elementy tej macierzy są różne od zera - równanie (6.8).
Wielobiegunnik
spełniający
powyższy
warunek
nazywamy
WIELOBIEGUNNIKIEM
SAMOGENERUJ
ĄCYM
.
Oznacza to, że w wewnętrznej strukturze wielobiegunnika wystę-
pują nieskompensowane źródła energii i wielobiegunnik zachowuje
się jak układ aktywny.
Występujące w równaniach (6.5) współczynniki y
kl
mają wymiar ad-
mitancji. Macierz tych współczynników (o wymiarze m
×
m
) oznaczamy
symbolem
Y
⋅
⋅
=
mm
m
m
m
m
y
y
y
y
y
y
y
y
y
,
...
,
,
,
...
,
,
,
...
,
,
2
1
21
22
21
1
12
11
Y
(6.11)
i nazywamy
ADMITANCYJN
Ą MACIERZĄ NIEOKREŚLONĄ
WIELOBIEGUNNIKA
.
- 5 -
W oparciu o (6.1), (6.2), (6.7) i (6.11) można zapisać równania (6.5) w po-
staci macierzowej
I = Y
⋅
U + I
0
(6.12)
dla wielobiegunnika samogenerującego, bądź uwzględniając (6.9), w po-
staci
I = Y
⋅
U
(6.13)
dla wielobiegunnika niegenerującego.
Układ równań 6.5 pozwala na określenie dowolnego elementu macie-
rzy admitancyjnej.
Np. element y
11
wyniesie:
0
...
1
0
1
1
11
2
=
=
=
−
=
m
U
U
U
I
I
y
ilustruje to rys.6.4.
m
1
2
m
3
I
1
Rys. 6.4.
U
1
Zatem dowolny element y
ij
określony jest związkiem:
j
k
m
k
U
j
i
i
ij
k
U
I
I
y
≠
=
=
−
=
,...,
2
,
1
0
0
(6.14)
UWAGA:
•
suma wszystkich elementów każdej kolumny macierzy admitancyj-
nej nieokreślonej jest równa zeru.
•
suma wszystkich elementów każdego wiersza macierzy admitancyj-
nej nieokreślonej jest równa zeru.
- 6 -
6.3. CZWÓRNIKI ELEKTRYCZNE
6.3.1. WIELOBIEGUNNIK A WIELOWROTNIK I CZWÓRNIK
Definicja1.
Jeśli: wielobiegunnik posiada parzystą liczbę zacisków (tzn.
m=2n) zgru-
powanych w
n par
i dla każdej pary zacisków zachodzi związek (
warunek regularności
)
k
k
I
I
−
=
'
(6.15)
to: - każdą tak określoną parę zacisków nazywamy "bramą", "wrotami";
- napięcie na bramie określone jest odpowiednią różnicą napięć zaci-
skowych tworzących tę bramę;
- wielobiegunnik nazywamy wówczas WIELOWROTNIKIEM bądź
WIELOBRAMNIKIEM.
Definicja 2.
Czwórnikiem (dwubramnikiem, dwuwrotnikiem) nazywamy
wielowrotnik, dla którego 2n=4, czyli n=2.
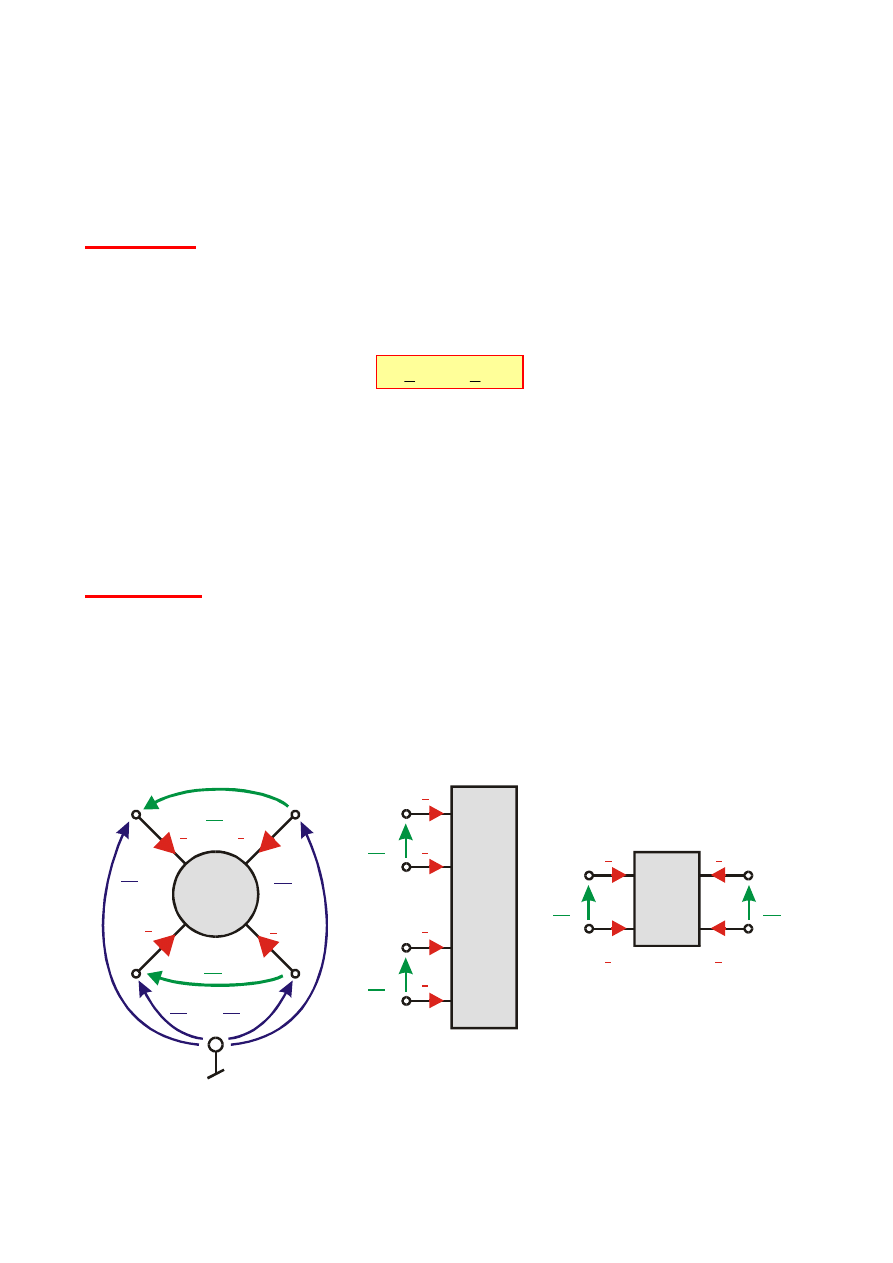
Wyodrębnienie z klasy wielobiegunników wielowrotników a z ich zbioru
czwórników ilustruje rys.6.5.
m= n
2
1
n
I
1
I
1’
I
n’
I
n
U
10
U
1’0
U
n’0
U
n0
1’
n’
0
U
1
2n
I
1
I
1’
I
n
I
n’
U
1
U
n
I
1
I
1’
U
1
I
2
I
2’
n=2
U
2
...
...
U
n
Rys.6.5.
- 7 -
Każdy wielowrotnik a zatem i czwórnik można opisać wektorem napięć i
prądów związanych z jego wrotami i tak:
dla wielowrotnika
[
]
T
n
I
I
I
,....,
,
2
1
=
I
,
[
]
T
n
U
U
U
,....,
,
2
1
=
U
(6.16)
dla czwórnika
[
]
T
I
I
2
1
,
=
I
,
[
]
T
U
U
2
1
,
=
U
(6.17)
Przyjęte założenia pozwalają przedstawić czwórnik jak na rys.6.6.
I
1
U
1
I
2
SLS
U
2
Rys.6.6.
Granicznymi stanami pracy ka
żdej z bram są:
•
stan jałowy
– gdy prąd danej bramy jest równy zeru
(I
1
=0 lub I
2
=0)
•
stan zwarcia
– gdy napięcie danej bramy jest równe zeru
(U
1
=0 lub U
2
=0)
6.3.2. PODSTAWOWE RÓWNANIA CZWÓRNIKA
Równaniami czwórnika nazywamy zależności wiążące ze sobą wiel-
kości charakteryzujące warunki jego pracy, a więc prąd i napięcie wej-
ś
ciowe ( I
1
, U
1
) oraz wyjściowe (I
2
, U
2
).
Ze względu na to, którą dwójkę z czterech wielkości elektrycznych
wrót czwórnika przyjmiemy jako zmienne niezależne możemy sformuło-
wać
sze
ść związków liniowych pomiędzy tymi wielkościami.
- 8 -
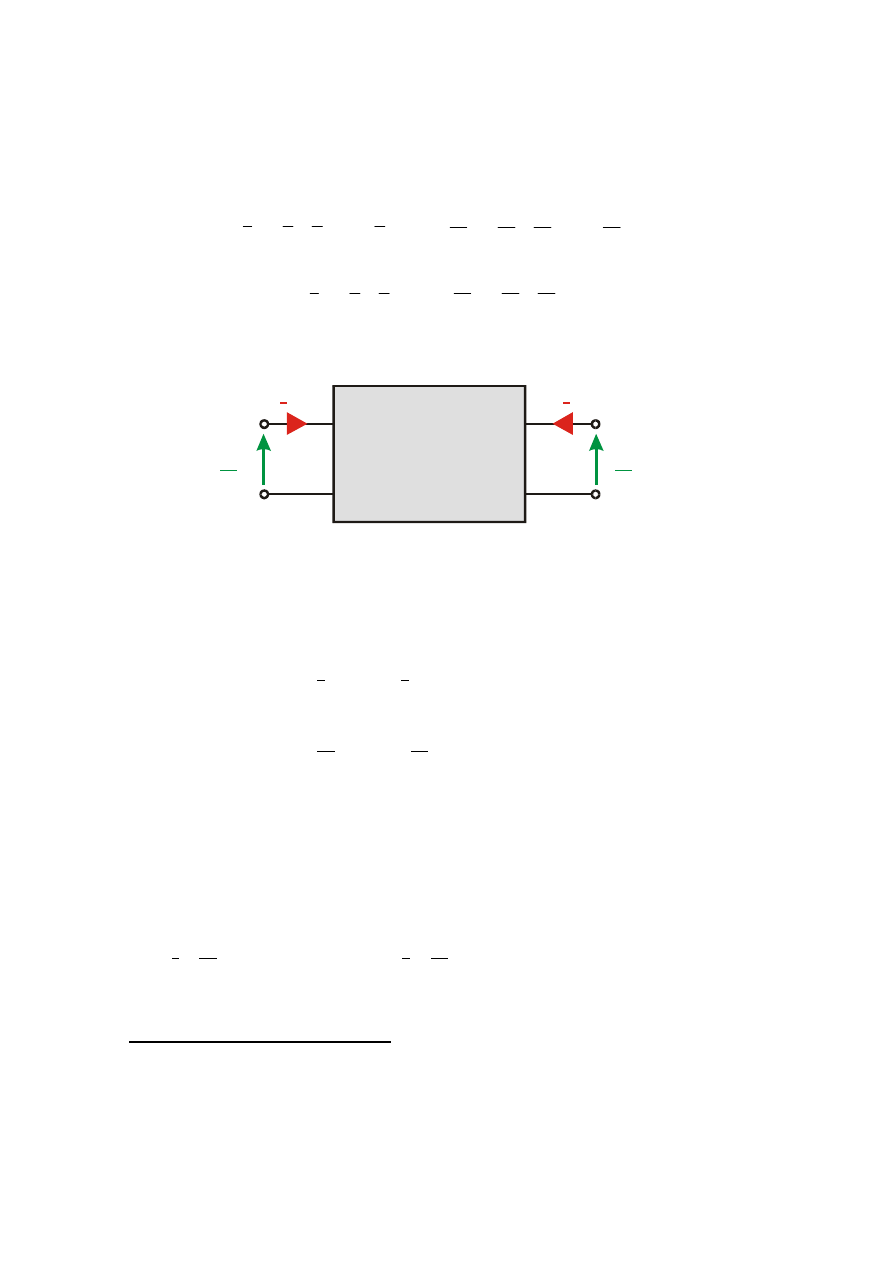
1. RÓWNANIA ADMITANCYJNE CZWÓRNIKA
Przyjmujemy, że wielkościami niezależnymi są napięcia: pierwotne
U
1
oraz wtórne U
2
. Odpowiada to następującemu sposobowi pobudzenia
czwórnika
I
1
U
1
I
2
CZWÓRNIK
U
2
1
1’
2
2’
I
11
U
1
I
21
CZWÓRNIK
1
1’
CZWÓRNIK
U
2
2
2’
I
12
I
22
=
+
+
=
+
=
22
21
2
12
11
1
I
I
I
I
I
I
gdzie:
1
11
11
U
y
I
=
2
12
12
U
y
I
=
1
21
21
U
y
I
=
2
22
22
U
y
I
=
Zatem równania admitancyjne czwórnika otrzymuje si
ę jako:
- 9 -
+
=
+
=
2
22
1
21
2
2
12
1
11
1
U
y
U
y
I
U
y
U
y
I
(6.18)
lub w postaci macierzowej
⋅
=
⋅
=
2
1
2
1
22
21
12
11
2
1
U
U
U
U
y
y
y
y
I
I
Y
(6.19)
gdzie
Y nazywamy macierzą admitancyjną czwórnika.
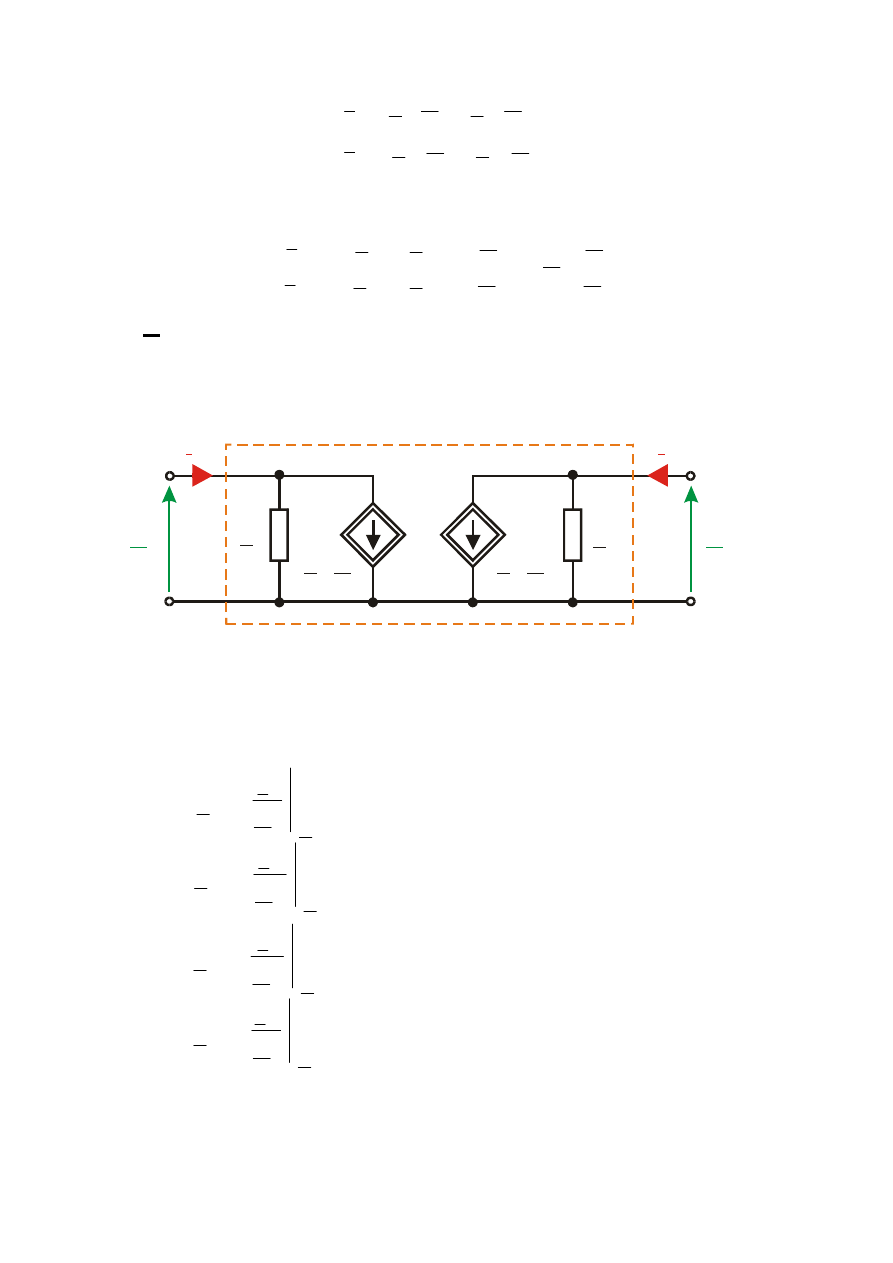
Model obwodowy czwórnika dla równań (6.18) przedstawia rys.6.7.
I
1
U
1
I
2
U
2
y
11
y
12
U
2
y
22
y
21
U
1
Rys.6.7.
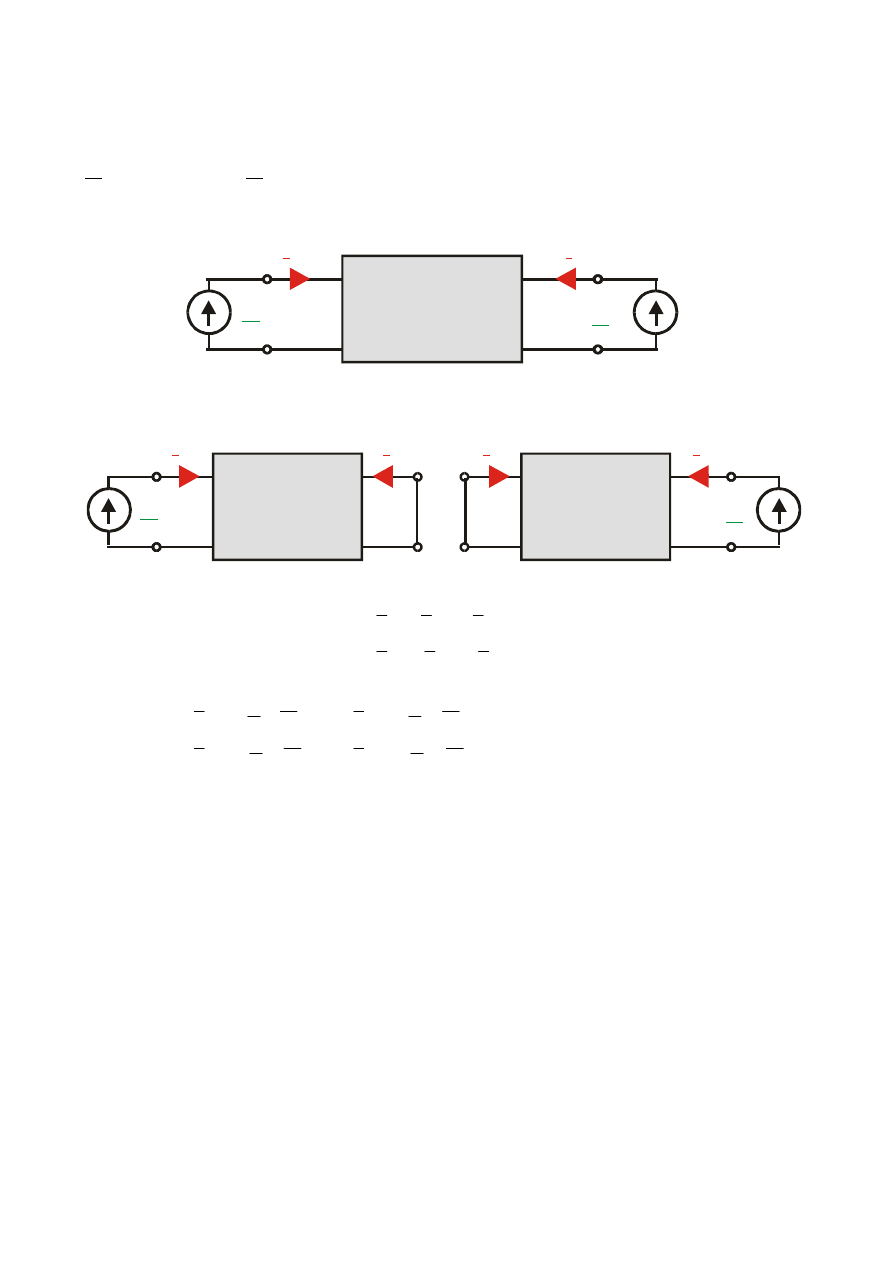
Elementami macierzy admitancyjnej są w ogólnym przypadku liczby ze-
spolone - można je wyznaczyć z układu równań 6.18 w granicznych sta-
nach pracy czwórnika:
−
=
−
=
=
=
zwarciowa
wyj
ś
ciowa
admitancja
zwarciowa
wej
ś
ciowa
admitancja
0
2
2
22
0
1
1
11
1
2
U
U
U
I
y
U
I
y
zwarcia
stanu
napi
ę
ciowe
-
pr
ą
dowo
cje
transmitan
=
=
=
=
0
1
2
21
0
2
1
12
2
1
U
U
U
I
y
U
I
y
- 10 -
2. RÓWNANIA IMPEDANCYJNE CZWÓRNIKA
+
=
+
=
2
22
1
21
2
2
12
1
11
1
I
z
I
z
U
I
z
I
z
U
(6.20)
lub w postaci macierzowej
⋅
=
⋅
=
2
1
2
1
22
21
12
11
2
1
I
I
I
I
z
z
z
z
U
U
Z
(6.21)
gdzie
Z nazywamy macierzą impedancyjną czwórnika.
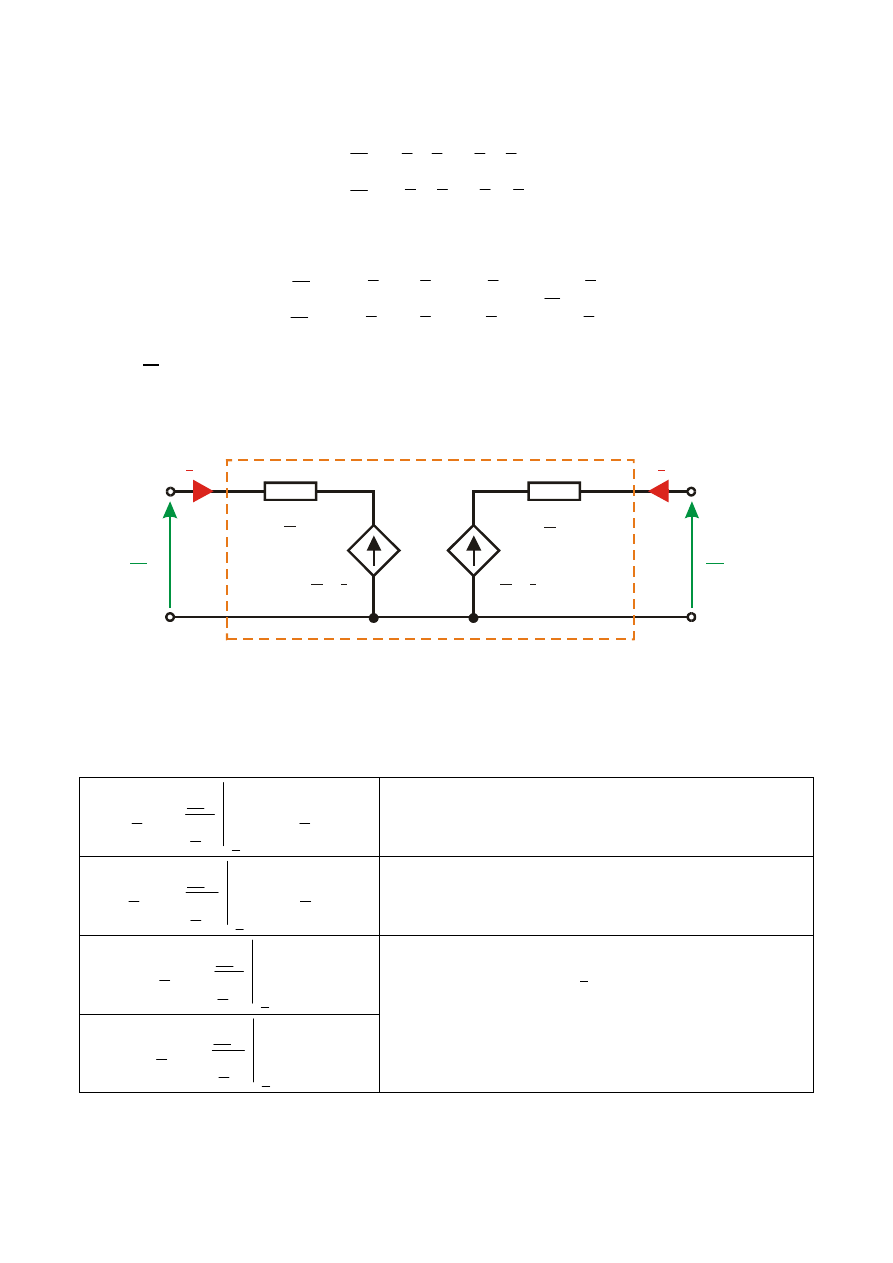
Model obwodowy czwórnika dla równań (6.20) przedstawia rys.6.8.
I
1
U
1
I
2
U
2
z
11
z
12
I
2
z
22
z
21
I
1
Rys.6.8.
Elementami macierzy impedancyjnej są w ogólnym przypadku liczby ze-
spolone mające wymiar impedancji [
Ω
]. Można je wyznaczyć z równań
6.20 analogicznie jak poprzednio:
10
0
1
1
11
2
z
I
U
z
I
=
=
=
impedancja wejściowa-jałowa, tzn. impedancja
"widziana" od strony bramy wejściowej przy
rozwartej (stan jałowy) bramie wyjściowej.
20
0
2
2
22
1
z
I
U
z
I
=
=
=
impedancja wyjściowa-jałowa, tzn. impedancja
"widziana" od strony bramy wyjściowej przy
rozwartej (stan jałowy) bramie wejściowej.
0
2
1
12
1
=
=
I
I
U
z
0
1
2
21
2
=
=
I
I
U
z
odpowiednie transmitancje napięciowo-prądowe
stanu jałowego, np.: z
12
- stosunek napięcia na
rozwartej bramie wejściowej do prądu bramy
wyjściowej, do której dołączony jest sygnał wy-
muszający (następuje transmisja sygnału przez
czwórnik od wyjścia do wejścia).
- 11 -
3. RÓWNANIA ŁA
ŃCUCHOWE CZWÓRNIKA
Równaniami łańcuchowymi opisujemy czwórnik wówczas, gdy znana
jest para wielkości elektrycznych związanych z bramą wtórną a poszuku-
jemy wielkości elektrycznych związanych z drugą bramą.
Czyli znamy [
U
2
,
I
2
] a poszukujemy wielkości [
U
1
,
I
1
] wówczas:
(
)
(
)
−
+
=
−
+
=
2
22
2
21
1
2
12
2
11
1
I
a
U
a
I
I
a
U
a
U
(6.22)
lub w postaci macierzowej
−
⋅
=
−
⋅
=
2
2
2
2
22
21
12
11
1
1
I
U
I
U
a
a
a
a
I
U
A
(6.23)
gdzie
A nazywamy macierzą łańcuchową czwórnika
a jej elementy para-
metrami łańcuchowymi czwórnika.
0
2
1
11
2
=
=
I
U
U
a
Parametr bezwymiarowy będący odwrotno-
ś
cią transmitancji napięciowej czwórnika w
stanie rozwarcia strony wtórnej.
0
2
1
12
2
=
−
=
U
I
U
a
Parametr posiadający wymiar impedancji,
będący odwrotnością transmitancji prądo-
wo-napięciowej w stanie zwarcia strony
wtórnej.
0
2
1
21
2
=
=
I
U
I
a
Parametr posiadający wymiar admitancji,
będący odwrotnością transmitancji napię-
ciowo-prądowej w stanie rozwarcia strony
wtórnej.
0
2
1
22
2
=
−
=
U
I
I
a
Parametr bezwymiarowy będący odwrotno-
ś
cią transmitancji prądowej czwórnika w
stanie zwarcia strony wtórnej.
- 12 -
4. RÓWNANIA ŁA
ŃCUCHOWE ODWROTNE
Jeśli znane są wielkości [
U
1
,
I
1
] a poszukujemy [
U
2
,
I
2
], to równania typu
(6.22) przyjmują postać
( )
( )
−
+
=
−
+
=
1
22
1
21
2
1
12
1
11
2
I
b
U
b
I
I
b
U
b
U
(6.24)
lub w postaci macierzowej
−
⋅
=
−
⋅
=
1
1
1
1
22
21
12
11
2
2
I
U
I
U
b
b
b
b
I
U
B
(6.25)
gdzie
B nazywamy macierzą łańcuchową odwrotną czwórnika.
0
1
2
11
1
=
=
I
U
U
b
Parametr bezwymiarowy będący transmi-
tancją napięciową czwórnika w stanie roz-
warcia strony pierwotnej.
0
1
2
12
1
=
−
=
U
I
U
b
Parametr posiadający wymiar impedancji,
równy transmitancji napięciowo-prądowej
w stanie zwarcia strony pierwotnej.
0
1
2
21
1
=
=
I
U
I
b
Parametr posiadający wymiar admitancji,
będący transmitancją prądowo-napięciową
w stanie rozwarcia strony pierwotnej.
0
1
2
22
1
=
−
=
U
I
I
b
Parametr bezwymiarowy równy transmi-
tancji prądowej czwórnika w stanie zwarcia
strony pierwotnej.
- 13 -
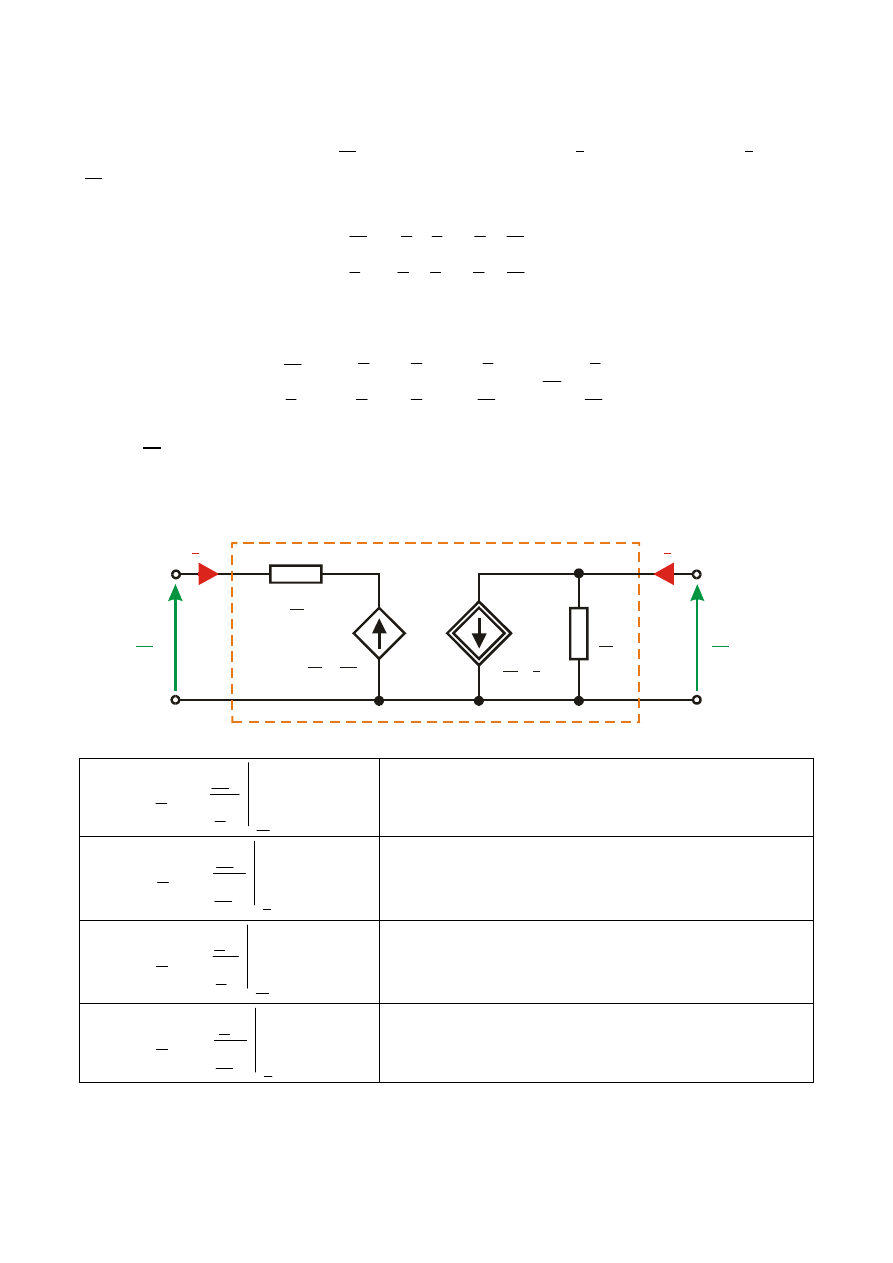
5. RÓWNANIA HYBRYDOWE
(szeregowo-równoległe)
Jeżeli napięcie wejściowe U
1
oraz prąd wyjściowy I
2
uzależnimy od I
1
oraz
U
2
, to otrzymamy równania hybrydowe czwórnika:
+
=
+
=
2
22
1
21
2
2
12
1
11
1
U
h
I
h
I
U
h
I
h
U
(6.26)
lub w postaci macierzowej
⋅
=
⋅
=
2
1
2
1
22
21
12
11
2
1
U
I
U
I
h
h
h
h
I
U
H
(6.27)
gdzie
H nazywamy macierzą hybrydową czwórnika.
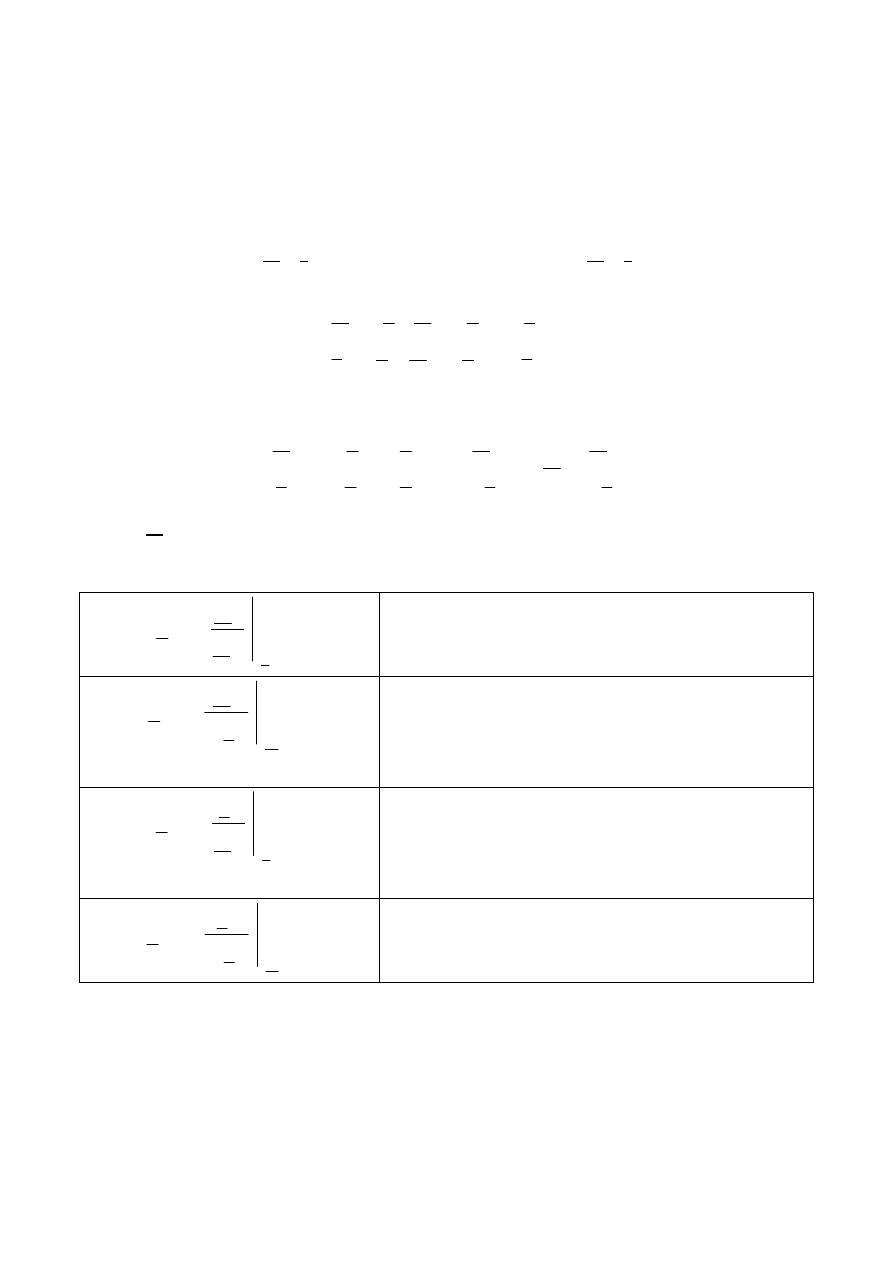
Model obwodowy czwórnika dla równań (6.26) przedstawia rys.6.9.
I
1
U
1
h
11
h
12
U
2
I
2
U
2
h
22
h
21
I
1
Rys.6.9.
0
1
1
11
2
=
=
U
I
U
h
Impedancja strony pierwotnej czwórnika w
stanie zwarcia strony wtórnej.
0
2
1
12
1
=
=
I
U
U
h
Parametr bezwymiarowy będący odwrotno-
ś
cią transmitancji napięciowej czwórnika w
stanie rozwarcia strony pierwotnej.
0
1
2
21
2
=
=
U
I
I
h
Parametr bezwymiarowy równy transmi-
tancji prądowej czwórnika w stanie zwarcia
strony wtórnej.
0
2
2
22
1
=
=
I
U
I
h
Admitancja strony wtórnej czwórnika w
stanie rozwarcia strony pierwotnej.
- 14 -
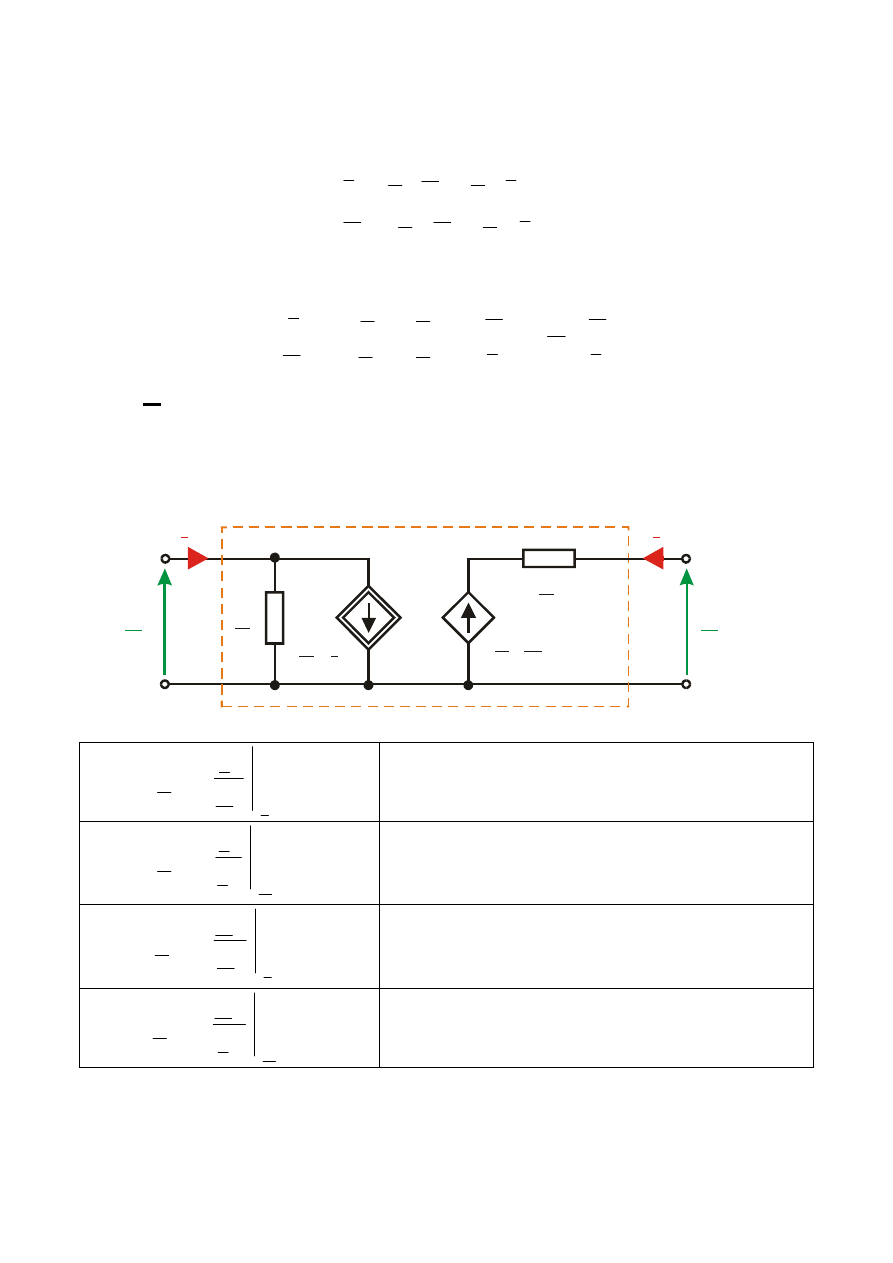
6. RÓWNANIA HYBRYDOWE ODWROTNE
(równoległo-szeregowe)
+
=
+
=
2
22
1
21
2
2
12
1
11
1
I
g
U
g
U
I
g
U
g
I
(6.28)
lub w postaci macierzowej
⋅
=
⋅
=
2
1
2
1
22
21
12
11
2
1
I
U
I
U
g
g
g
g
U
I
G
(6.29)
gdzie
G nazywamy macierzą hybrydową odwrotną czwórnika.
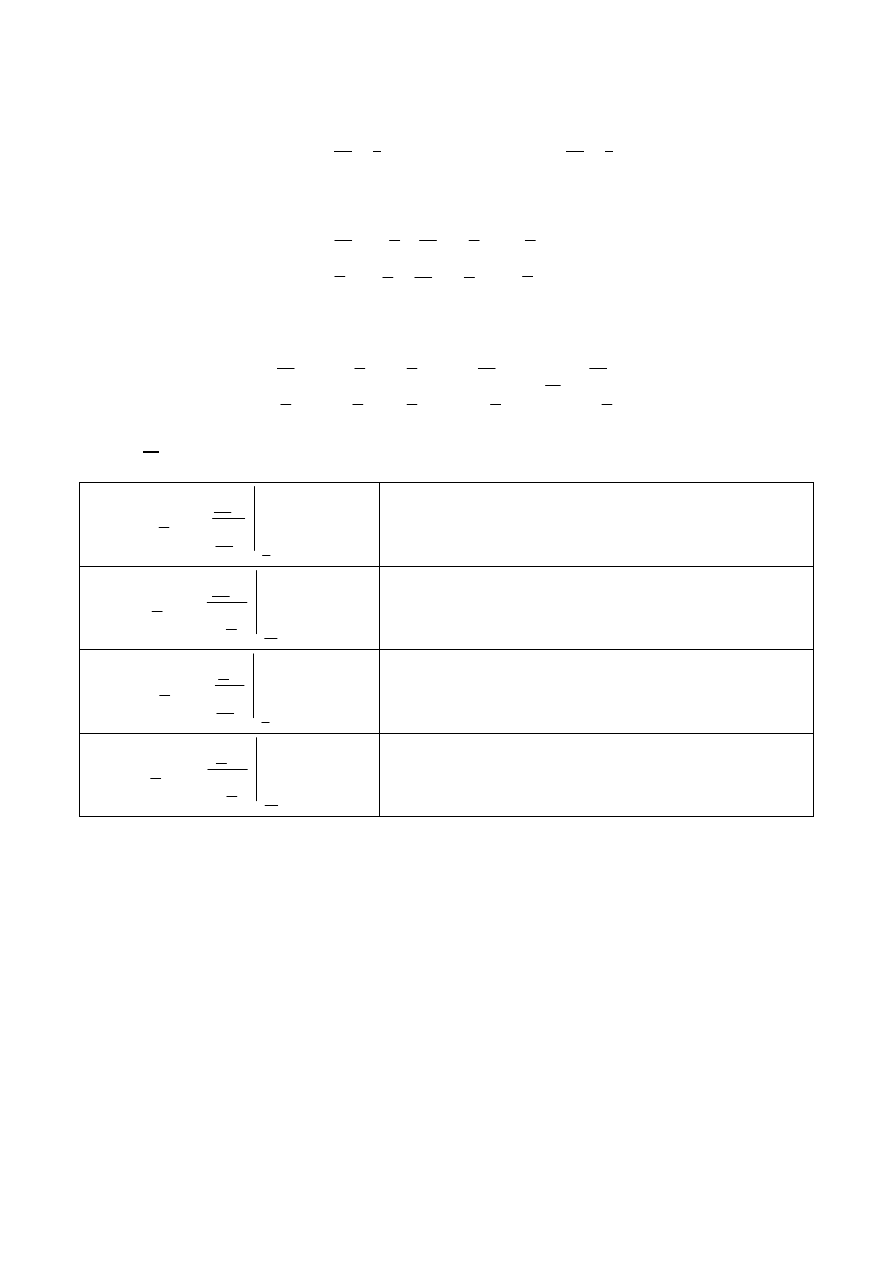
Równaniom (6.28) odpowiada model obwodowy czwórnika przedstawiony
na rys.6.10.
I
1
U
1
g
11
g
12
I
2
I
2
U
2
g
22
g
21
U
1
Rys.6.10.
0
1
1
11
2
=
=
I
U
I
g
Admitancja strony pierwotnej czwórnika w
stanie rozwarcia strony wtórnej.
0
2
1
12
1
=
=
U
I
I
g
Parametr bezwymiarowy będący odwrotno-
ś
cią transmitancji prądowej czwórnika w
stanie zwarcia strony pierwotnej.
0
1
2
21
2
=
=
I
U
U
g
Parametr bezwymiarowy równy transmi-
tancji napięciowej czwórnika w stanie roz-
warcia strony wtórnej.
0
2
2
22
1
=
=
U
I
U
g
Impedancja strony wtórnej czwórnika w
stanie zwarcia strony pierwotnej.
- 15 -
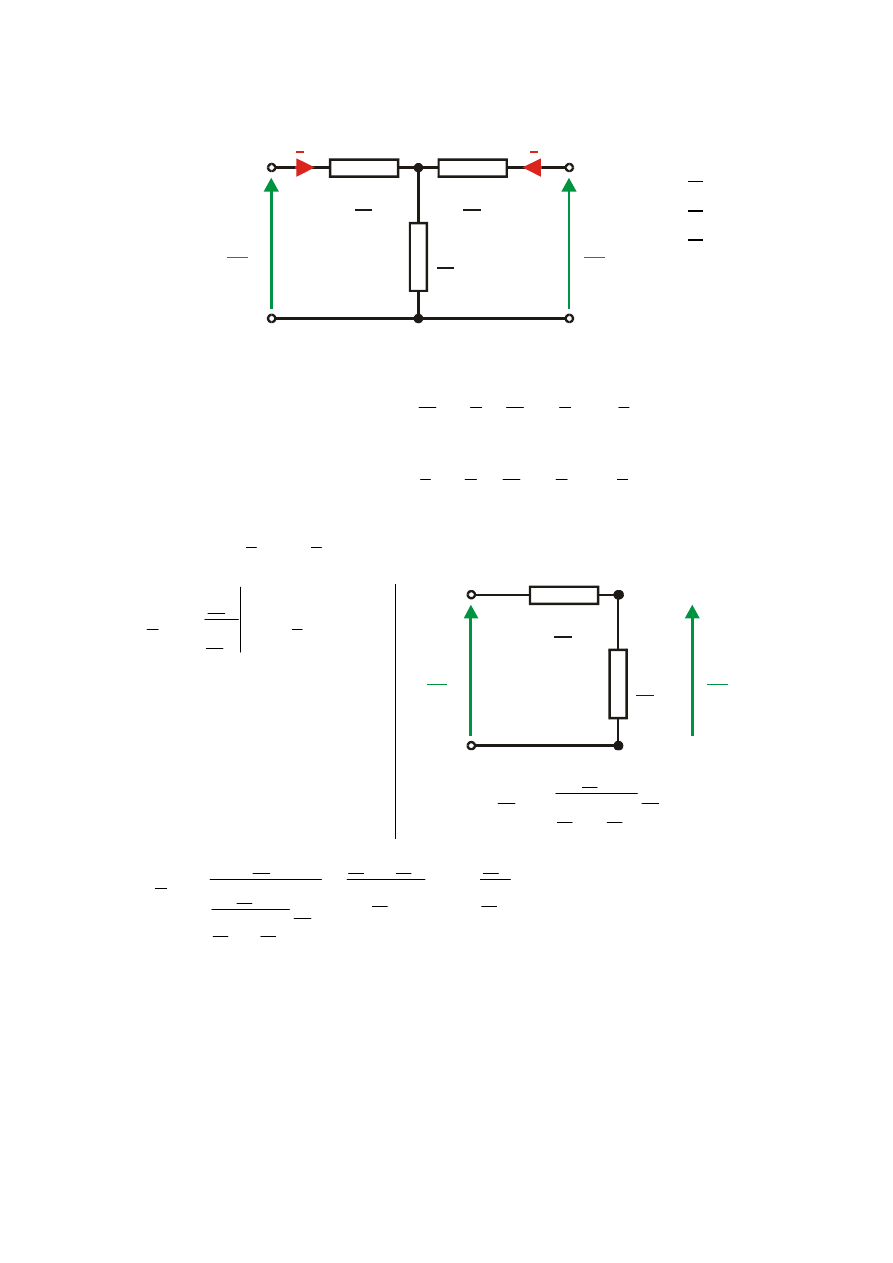
PRZYKŁAD 1:
Wyznaczy
ć
parametry ła
ń
cuchowe czwórnika.
Z
1
U
1
Z
3
Z
2
U
2
I
1
I
2
Dane:
Z
1
=j10
Ω
,
Z
2
=5
Ω
,
Z
3
=j10
Ω
.
Równania łańcuchowe (6.22):
−
+
=
−
+
=
)
(
)
(
2
22
2
21
1
2
12
2
11
1
I
a
U
a
I
I
a
U
a
U
Wprowadzamy
2
|
2
I
I
−
=
•
0
|
2
2
1
11
=
=
I
gdy
U
U
a
Z
1
U
1
Z
2
U
2
1
2
1
2
2
U
Z
Z
Z
U
+
=
[ ]
−
+
=
+
=
+
=
+
=
2
1
1
2
1
2
2
1
1
2
1
2
1
11
j
Z
Z
Z
Z
Z
U
Z
Z
Z
U
a
- 16 -
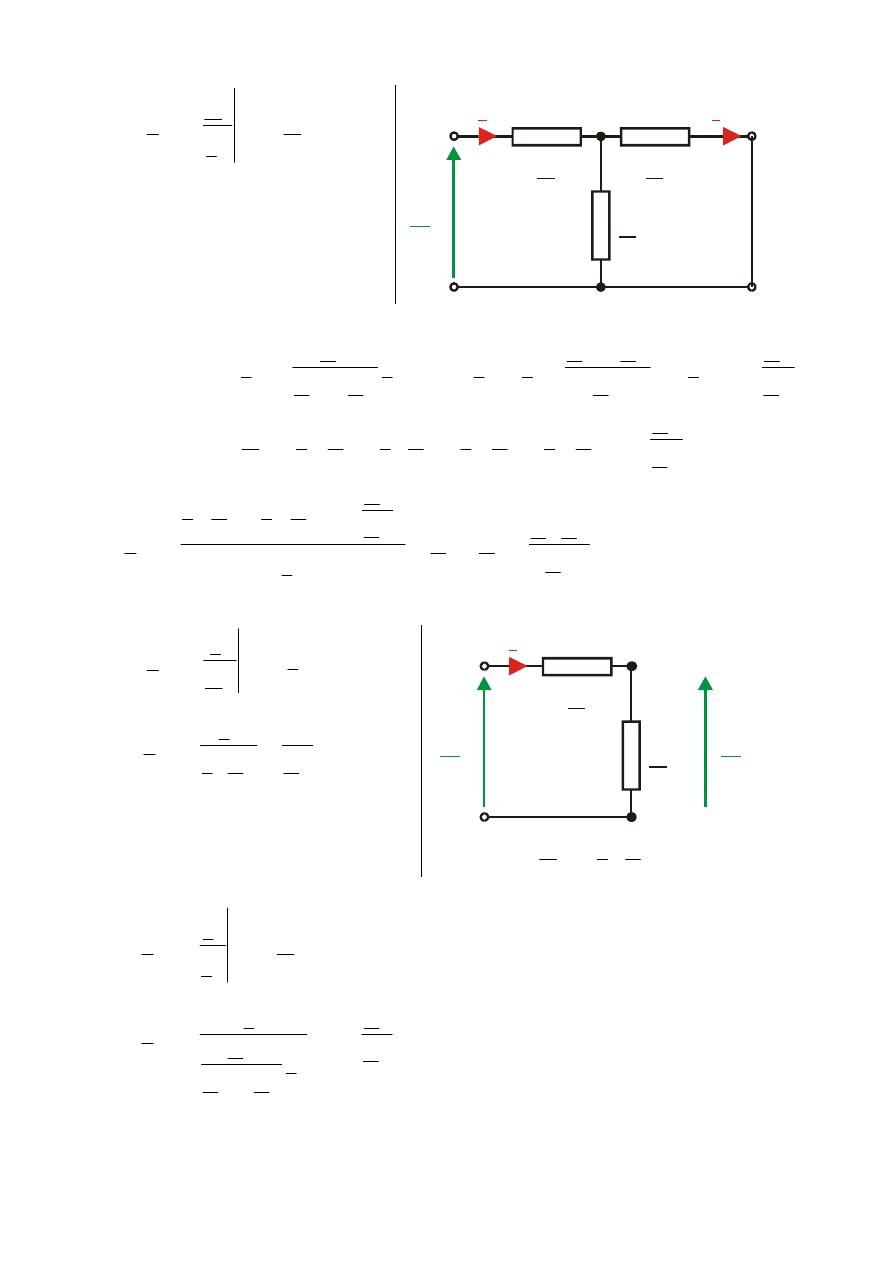
•
0
2
|
2
1
12
=
=
U
gdy
I
U
a
Z
1
U
1
Z
3
Z
2
I
1
I
2
|
z dzielnika prądu:
+
=
+
=
⇒
+
=
2
3
|
2
2
3
2
|
2
1
1
3
2
2
|
2
1
Z
Z
I
Z
Z
Z
I
I
I
Z
Z
Z
I
+
+
=
+
=
2
3
1
|
2
3
|
2
1
1
3
|
2
1
1
Z
Z
Z
I
Z
I
Z
I
Z
I
U
(
)
[ ]
Ω
20
20
1
2
3
1
3
1
|
2
2
3
1
|
2
3
|
2
12
j
Z
Z
Z
Z
Z
I
Z
Z
Z
I
Z
I
a
+
−
=
+
+
=
+
+
=
•
0
|
2
2
1
21
=
=
I
gdy
U
I
a
[ ]
S
Z
Z
I
I
a
2
,
0
1
2
2
1
1
21
=
=
=
Z
1
U
1
Z
2
U
2
I
1
2
1
2
Z
I
U
=
•
0
2
|
2
1
22
=
=
U
gdy
I
I
a
[ ]
−
+
=
+
=
+
=
2
1
1
2
3
1
3
2
2
1
22
j
Z
Z
I
Z
Z
Z
I
a
Wyszukiwarka
Podobne podstrony:
3 Wyklad OiSE id 33284 Nieznany
7 A Wyklad OiSE id 45099 Nieznany (2)
5 B Wyklad OiSE id 40059 Nieznany (2)
4 Wyklad OiSE id 37360 Nieznany (2)
3 Wyklad OiSE id 33284 Nieznany
AiSD Wyklad4 dzienne id 53497 Nieznany (2)
or wyklad 4b id 339029 Nieznany
Materialy do wykladu nr 5 id 28 Nieznany
Finanse Wyklady FiR id 172193 Nieznany
AiSD Wyklad9 dzienne id 53501 Nieznany
Folie wyklad2 Krakow id 286699 Nieznany
OP wyklad nr 3 id 335762 Nieznany
prc wyklad zagad 5 id 388963 Nieznany
hydrologia wyklad 06 id 207845 Nieznany
hydrologia wyklad 05 id 207839 Nieznany
F II wyklad 11 id 167234 Nieznany
BHP Wyklad 10 id 84576 Nieznany (2)
więcej podobnych podstron