
KUKA System Technology
KUKA.ExpertTech 3.1
Für KUKA System Software 8.2
KUKA Roboter GmbH
Stand: 16.12.2010
Version: KST ExpertTech 3.1 V1 de

KUKA.ExpertTech 3.1
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
© Copyright 2010
KUKA Roboter GmbH
Zugspitzstraße 140
D-86165 Augsburg
Deutschland
Diese Dokumentation darf – auch auszugsweise – nur mit ausdrücklicher Genehmigung der KUKA
Roboter GmbH vervielfältigt oder Dritten zugänglich gemacht werden.
Es können weitere, in dieser Dokumentation nicht beschriebene Funktionen in der Steuerung lauffä-
hig sein. Es besteht jedoch kein Anspruch auf diese Funktionen bei Neulieferung bzw. im Servicefall.
Wir haben den Inhalt der Druckschrift auf Übereinstimmung mit der beschriebenen Hard- und Soft-
ware geprüft. Dennoch können Abweichungen nicht ausgeschlossen werden, so dass wir für die voll-
ständige Übereinstimmung keine Gewähr übernehmen. Die Angaben in dieser Druckschrift werden
jedoch regelmäßig überprüft und notwendige Korrekturen sind in der nachfolgenden Auflage enthal-
ten.
Technische Änderungen ohne Beeinflussung der Funktion vorbehalten.
Original-Dokumentation
KIM-PS5-DOC
Publikation:
Pub KST ExpertTech 3.1 de
Buchstruktur:
KST ExpertTech 3.1 V1.1
Label:
KST ExpertTech 3.1 V1 de
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
Inhaltsverzeichnis
Einleitung .....................................................................................................
5
Zielgruppe ..................................................................................................................
5
Dokumentation des Industrieroboters ........................................................................
5
Darstellung von Hinweisen ........................................................................................
5
Produktbeschreibung .................................................................................
7
Übersicht ExpertTech ................................................................................................
7
Sicherheit .....................................................................................................
9
Installation ....................................................................................................
11
Systemvoraussetzungen ............................................................................................
11
ExpertTech installieren oder updaten ........................................................................
11
ExpertTech deinstallieren ..........................................................................................
11
Bedienung ....................................................................................................
13
Menüs ........................................................................................................................
13
Programmierung ..........................................................................................
15
Inline-Formular Kollisionserkennung ..........................................................................
15
Inline-Formular PTP ...................................................................................................
15
Inline-Formular PTP_REL ..........................................................................................
17
Inline-Formular LIN ....................................................................................................
18
Inline-Formular LIN_REL ...........................................................................................
19
Inline-Formular CIRC .................................................................................................
21
Inline-Formular CIRC_REL ........................................................................................
23
Spline-Bewegungen ...................................................................................................
25
Inline-Formular SPL ..............................................................................................
25
Inline-Formular SLIN .............................................................................................
26
Inline-Formular SCIRC .........................................................................................
27
Bewegung mit Platzhalter ..........................................................................................
28
6.10 Roboterposition übernehmen .....................................................................................
28
Zielpunkt teachen .................................................................................................
28
Zielpunkt als Variable teachen ..............................................................................
29
Koordinaten für den Zielpunkt eingeben ...............................................................
29
6.11 Datentypen für die Bewegungsprogrammierung .......................................................
30
Meldungen ....................................................................................................
31
KUKA Service ..............................................................................................
33
Support-Anfrage .........................................................................................................
33
KUKA Customer Support ...........................................................................................
33
Inhaltsverzeichnis

Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
1 Einleitung
1
Einleitung
1.1
Zielgruppe
Diese Dokumentation richtet sich an Benutzer mit folgenden Kenntnissen:
Fortgeschrittene Systemkenntnisse der Robotersteuerung
Fortgeschrittene KRL-Programmierkenntnisse
1.2
Dokumentation des Industrieroboters
Die Dokumentation zum Industrieroboter besteht aus folgenden Teilen:
Dokumentation für die Robotermechanik
Dokumentation für die Robotersteuerung
Bedien- und Programmieranleitung für die KUKA System Software
Anleitungen zu Optionen und Zubehör
Teilekatalog auf Datenträger
Jede Anleitung ist ein eigenes Dokument.
1.3
Darstellung von Hinweisen
Sicherheit
Diese Hinweise dienen der Sicherheit und müssen beachtet werden.
Hinweise
Diese Hinweise dienen der Arbeitserleichterung oder enthalten Verweise auf
weiterführende Informationen.
Für den optimalen Einsatz unserer Produkte empfehlen wir unseren
Kunden eine Schulung im KUKA College. Informationen zum Schu-
lungsprogramm sind unter www.kuka.com oder direkt bei den Nie-
derlassungen zu finden.
Diese Hinweise bedeuten, dass Tod oder schwere Kör-
perverletzungen eintreten werden, wenn keine Vor-
sichtsmaßnahmen getroffen werden.
Diese Hinweise bedeuten, dass Tod oder schwere Kör-
perverletzungen eintreten können, wenn keine Vor-
sichtsmaßnahmen getroffen werden.
Diese Hinweise bedeuten, dass leichte Körperverlet-
zungen eintreten können, wenn keine Vorsichtsmaß-
nahmen getroffen werden.
Diese Hinweise bedeuten, dass Sachschäden eintreten
können
, wenn keine Vorsichtsmaßnahmen getroffen
werden.
Diese Hinweise enthalten Verweise auf sicherheitsrelevante Infor-
mationen oder allgemeine Sicherheitsmaßnahmen. Diese Hinweise
beziehen sich nicht auf einzelne Gefahren oder einzelne Vorsichts-
maßnahmen.
Hinweis zur Arbeitserleichterung oder Verweis auf weiterführende In-
formationen.


Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
2 Produktbeschreibung
2
Produktbeschreibung
2.1
Übersicht ExpertTech
Funktionen
ExpertTech ist ein nachladbares Technologiepaket und stellt Inline-Formulare
mit folgenden Funktionen zur Verfügung:
Ein- und Ausschalten der Kollisionserkennung
Programmieren von PTP-, LIN- und CIRC-Bewegungen mit der Option
Überschleifen
Programmieren von PTP_REL-, LIN_REL- und CIRC_REL-Bewegungen
mit der Option Überschleifen
Programmieren von Spline-Einzelbewegungen - SLIN und SCIRC - mit
der Option Wertzuweisung an Systemvariablen
Programmieren von Spline-Segmenten - SPL, SLIN und SCIRC in Spline-
Blöcken - mit der Option Wertzuweisung an Systemvariablen
Eigenschaften
Bewegung mit Platzhalter einfügen, wenn die Position des Zielpunktes bei
der Erstellung des Programms noch nicht bekannt ist.
Roboterpositionen können auf folgende Arten in ein Inline-Formular über-
nommen werden:
Zielpunkt teachen.
Zielpunkt als Variable teachen.
Koordinaten für Zielpunkt manuell eingeben.

Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
3 Sicherheit
3
Sicherheit
Diese Dokumentation enthält Sicherheitshinweise, die sich spezifisch auf die
hier beschriebene Software beziehen.
Die grundlegenden Sicherheitsinformationen zum Industrieroboter sind im Ka-
pitel "Sicherheit" der Bedien- und Programmieranleitung für Systemintegrato-
ren oder der Bedien- und Programmieranleitung für Endanwender zu finden.
Das Kapitel "Sicherheit" in der Bedien- und Programmieranleitung
muss beachtet werden. Tod von Personen, schwere Körperverlet-
zungen oder erhebliche Sachschäden können sonst die Folge sein.

Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
4 Installation
4
Installation
4.1
Systemvoraussetzungen
Software
KUKA System Software 8.2
4.2
ExpertTech installieren oder updaten
Voraussetzung
Benutzergruppe Experte
Software auf KUKA.USBData-Stick
Vorgehensweise
1. USB-Stick anstecken.
2. Im Hauptmenü Inbetriebnahme > Zusatzsoftware installieren wählen.
3. Auf Neue Software drücken. Wenn eine Software, die sich auf dem USB-
Stick befindet, nicht angezeigt wird, auf Aktualisieren drücken.
4. Den Eintrag ExpertTech markieren und auf Installieren drücken. Sicher-
heitsabfrage mit Ja beantworten. Die Dateien werden auf die Festplatte
kopiert.
5. Wenn eine weitere Software von diesem Stick installiert werden soll,
Schritt 4 wiederholen.
6. USB-Stick entfernen.
7. Abhängig von der Zusatzsoftware kann ein Neustart notwendig sein. In
diesem Fall wird eine Aufforderung zum Neustart angezeigt. Mit OK be-
stätigen und die Robotersteuerung neu starten. Die Installation wird fort-
gesetzt und abgeschlossen.
LOG-Datei
Es wird eine LOG-Datei unter C:\KRC\ROBOTER\LOG erstellt.
4.3
ExpertTech deinstallieren
Voraussetzung
Benutzergruppe Experte
Vorgehensweise
1. Im Hauptmenü Inbetriebnahme > Zusatzsoftware installieren wählen.
Alle installierten Zusatzprogramme werden angezeigt.
2. Den Eintrag ExpertTech markieren und Deinstallieren drücken. Sicher-
heitsabfrage mit Ja beantworten. Die Deinstallation wird vorbereitet.
3. Robotersteuerung neu starten. Die Deinstallation wird fortgesetzt und ab-
geschlossen.
LOG-Datei
Es wird eine LOG-Datei unter C:\KRC\ROBOTER\LOG erstellt.
Es wird empfohlen, vor dem Update einer Software alle zugehörigen
Daten zu archivieren.
Es darf ausschließlich der KUKA.USBData-Stick ver-
wendet werden. Wenn ein anderer USB-Stick verwen-
det wird, können Daten verlorengehen oder verändert werden.
Es wird empfohlen, vor der Deinstallation einer Software alle zuge-
hörigen Daten zu archivieren.


Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
5 Bedienung
5
Bedienung
5.1
Menüs
Folgende Menüs und Befehle sind spezifisch für dieses Technologiepaket:
Befehle
KRL-Assistent
CIRC_REL
CIRC
Spline Befehle
SCIRC
SLIN
SPL
Kollisionserkennung
PTP_REL
PTP
LIN_REL
LIN

Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
6 Programmierung
6
Programmierung
6.1
Inline-Formular Kollisionserkennung
Aufruf
Menüfolge Befehle > KRL-Assistent > Kollisionserkennung wählen.
Beschreibung
Diese Anweisung schaltet die Kollisionserkennung ein oder aus. Die Anwei-
sung bezieht sich auf die nächste Bewegungsanweisung im Programm.
Wenn die Kollisionserkennung eingeschaltet und der Startpunkt der Bewe-
gung überschliffen ist, liegt der Schaltpunkt für die Kollisionserkennung am
Ende des Überschleifweges des Startpunktes. Dieser Schaltpunkt liegt mögli-
cherweise zu spät. Damit die Kollisionserkennung rechtzeitig eingeschaltet
wird, kann der Schaltpunkt zeitlich verschoben werden.
Startpunkt ist überschliffen: Mit Delay=ON wird die Kollisionserkennung
ca. in der Mitte des Überschleifweges des Startpunktes eingeschaltet.
Startpunkt ist Genauhaltpunkt: Mit Delay=OFF wird die Kollisionserken-
nung am Startpunkt eingeschaltet.
6.2
Inline-Formular PTP
Aufruf
Menüfolge Befehle > KRL-Assistent > PTP wählen.
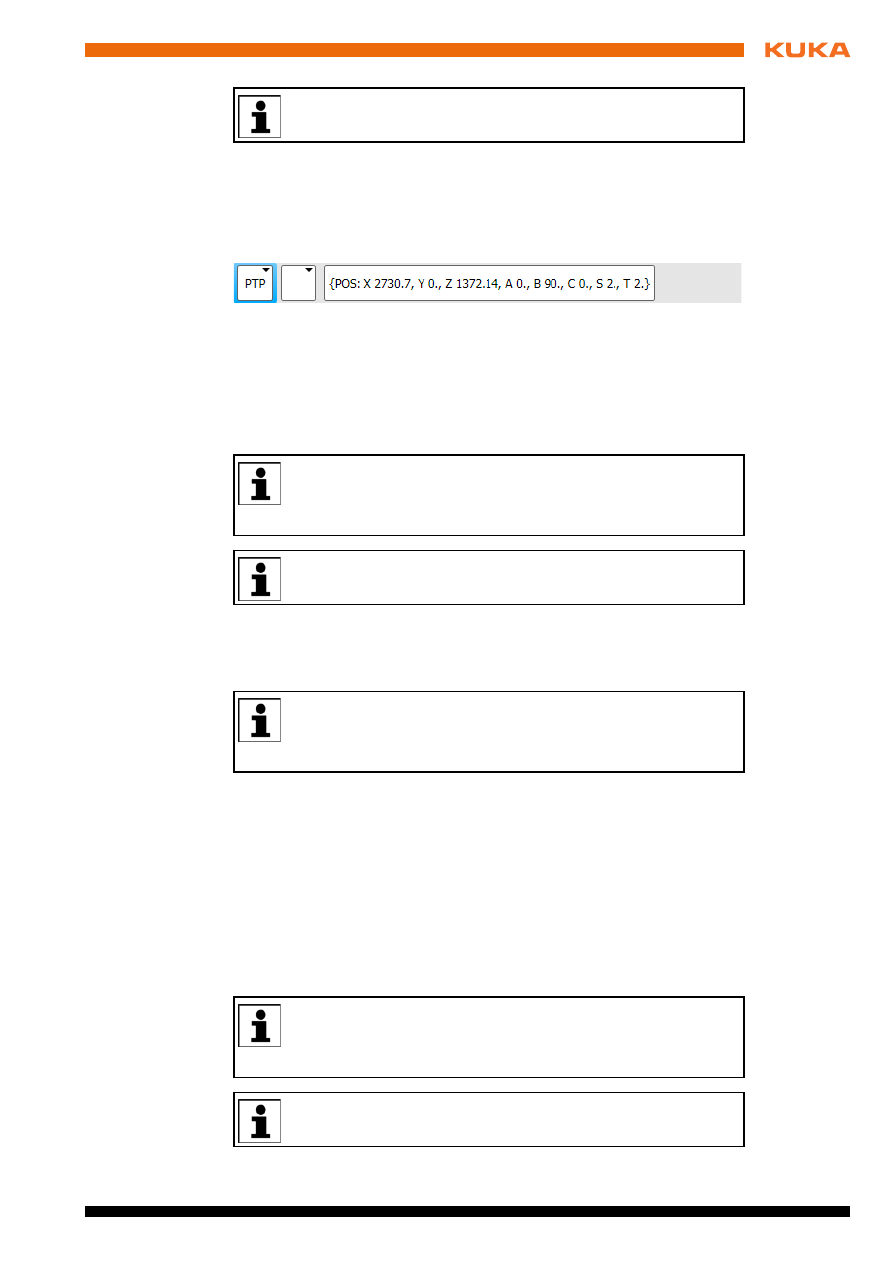
Beschreibung
Führt eine Punkt-zu-Punkt-Bewegung zum Zielpunkt aus. Die Koordinaten
des Zielpunkts sind absolut.
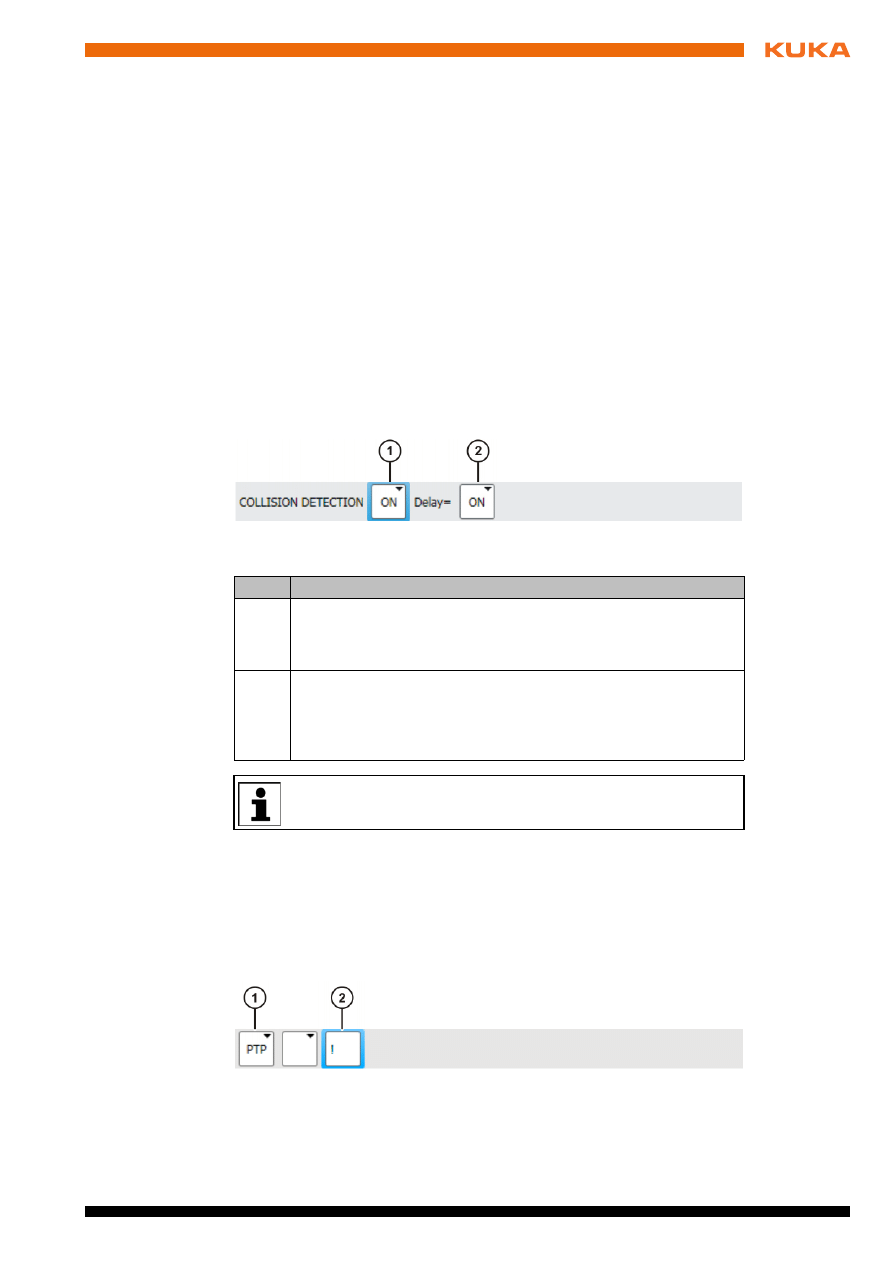
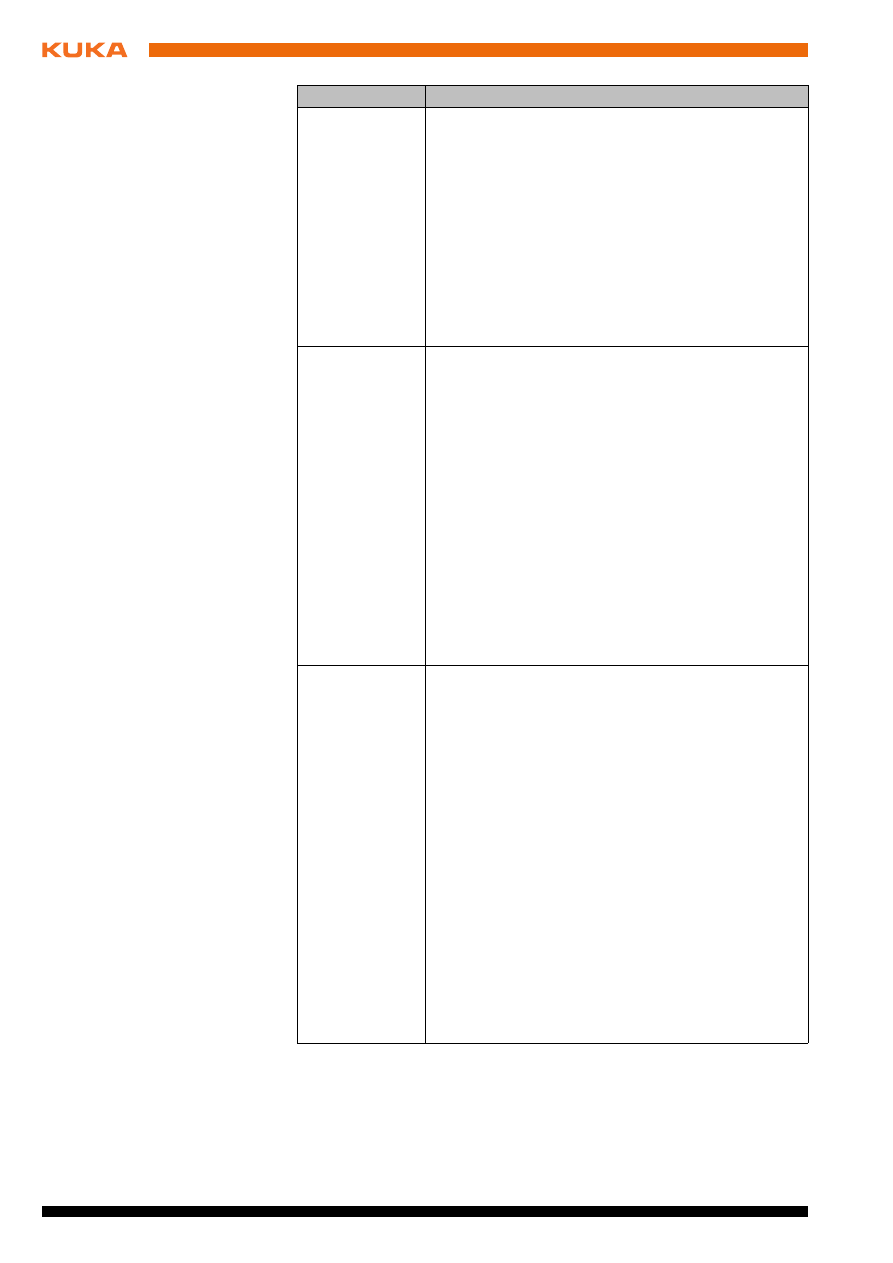
Abb. 6-1: KRL-Assistent Inline-Formular Kollisionserkennung
Pos.
Beschreibung
1
Kollisionerkennung ein-/ausschalten.
ON
OFF
2
Schaltpunkt bei überschliffenem Startpunkt in Richtung Bewe-
gungsanfang verschieben.
ON
: Verwenden, wenn Startpunkt überschliffen ist.
OFF
: Verwenden, wenn Startpunkt Genauhaltpunkt ist.
Weitere Informationen zur Kollisionserkennung sind in der Bedien-
und Programmieranleitung für Systemintegratoren zu finden.
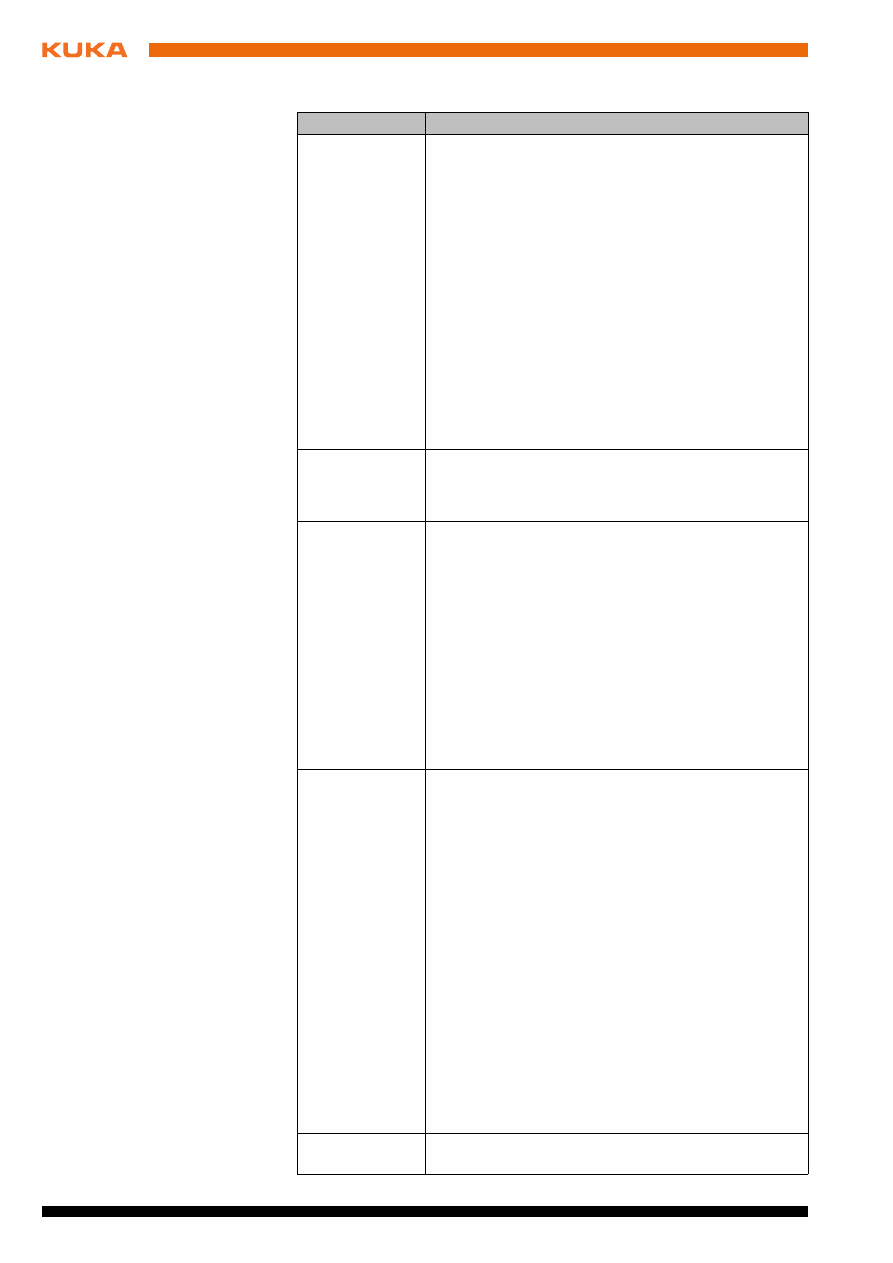
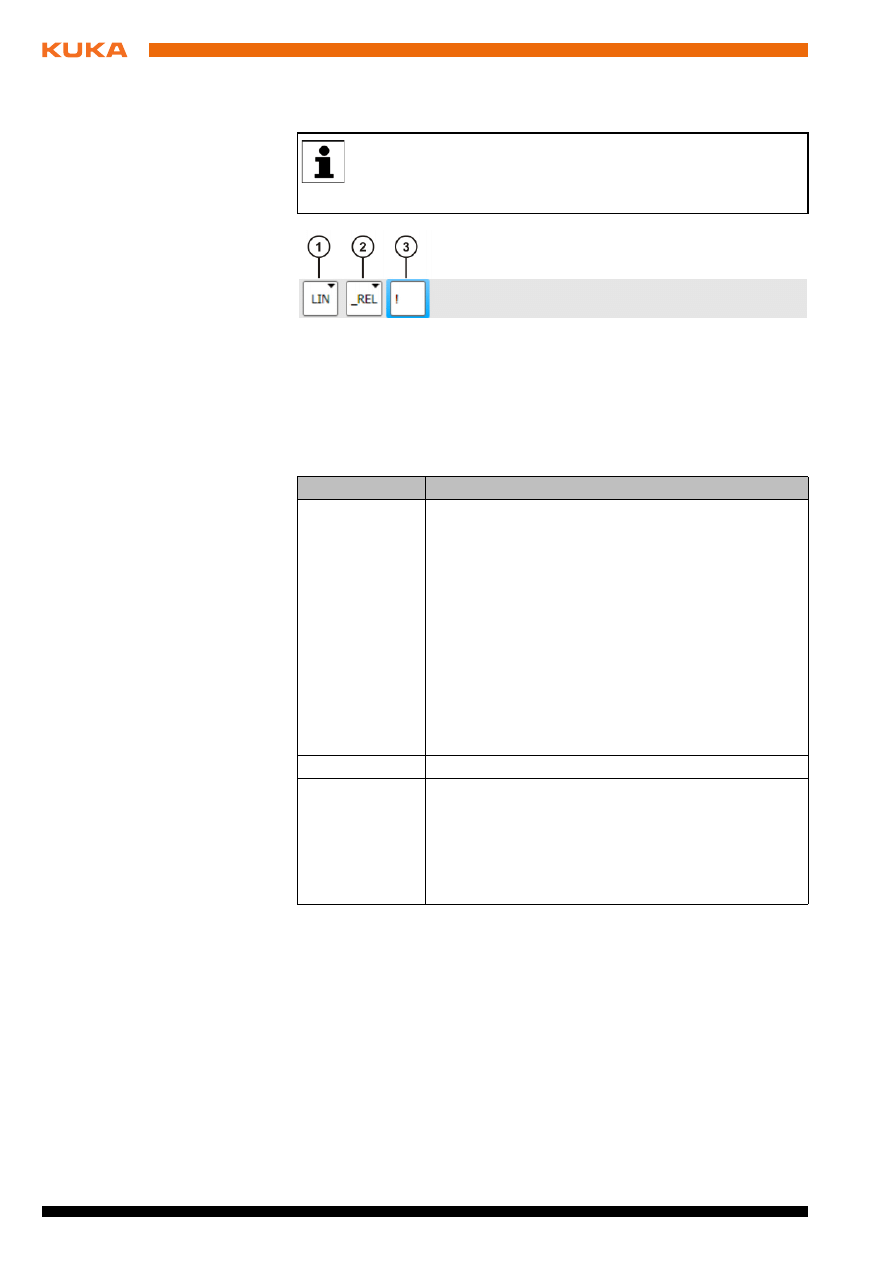
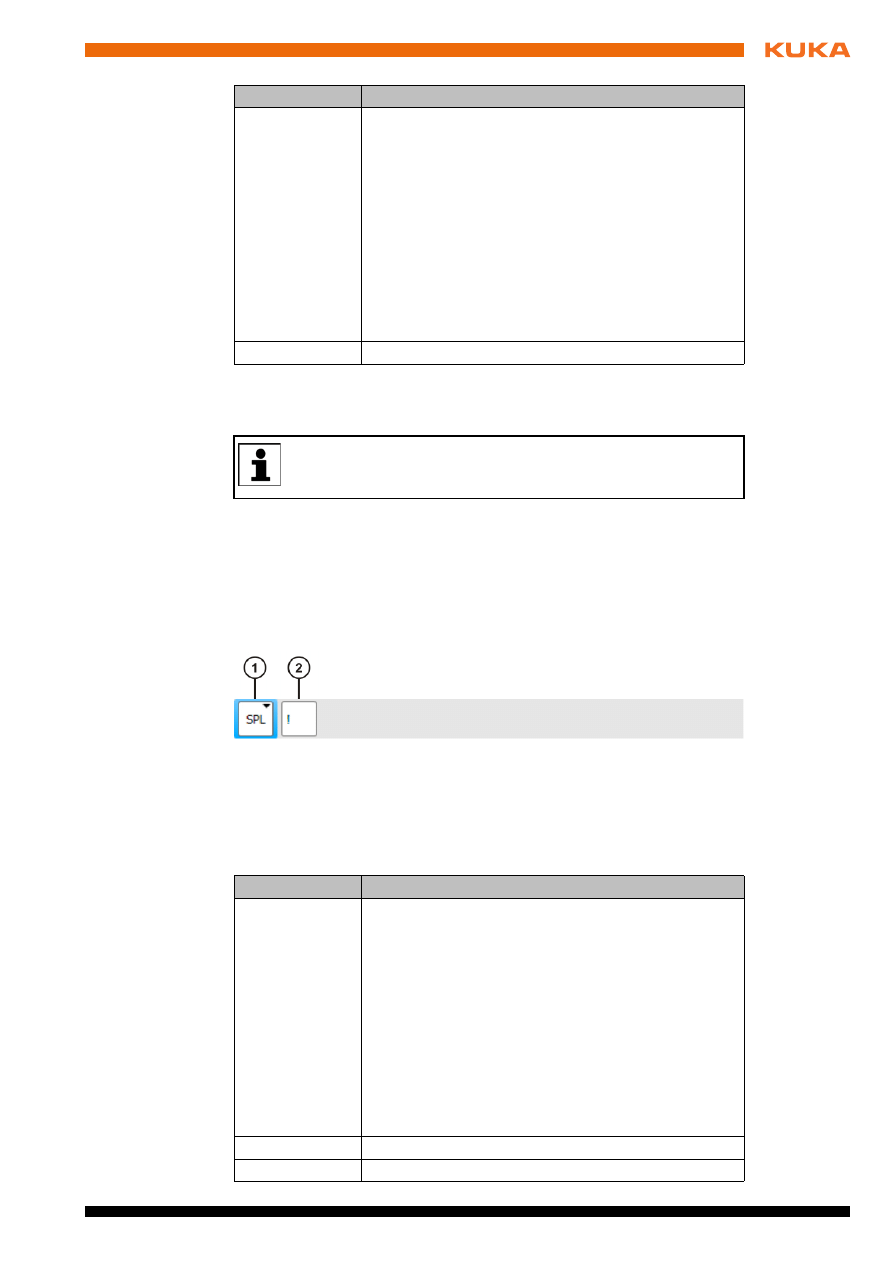
Abb. 6-2: KRL-Assistent Inline-Formular PTP
1
Bewegungsart PTP
2
Platzhalter für den Zielpunkt
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
Folgende Schaltflächen stehen zur Verfügung:
Schaltfläche
Beschreibung
{?}
Öffnet ein Menü mit den Datentypen, die zum Spei-
chern des Zielpunkts zur Verfügung stehen
Kartesische Datentypen:
E6POS
POS
FRAME
Die kartesischen Koordinaten beziehen sich auf das
BASE-Koordinatensystem.
Achsspezifische Datentypen:
E6AXIS
AXIS
Platzhalter für den Zielpunkt:
!
PTP
Öffnet ein Menü zum Umschalten der Bewegungsart
LIN
: LIN-Bewegung
REL
: PTP_REL-Bewegung
Cont
Öffnet ein Menü zur Angabe des 1. Überschleifparame-
ters
C_DIS
: Distanzparameter: Das Überschleifen be-
ginnt frühestens, wenn die Entfernung zum Ziel-
punkt den Wert von $APO.CDIS unterschreitet.
C_PTP
: Der Zielpunkt wird überschliffen.
Entfernen
: Löscht die Überschleifparameter
Beim PTP-PTP-Überschleifen genügt die Angabe des
1. Überschleifparameters. Beim PTP-CP-Überschlei-
fen, d. h. wenn nach dem überschliffenen PTP-Satz ein
LIN- oder CIRC-Satz folgt, muss zusätzlich ein 2. Über-
schleifparameter angegeben werden.
2. Cont
Öffnet ein Menü zur Angabe des 2. Überschleifparame-
ters
Diese Schaltfläche steht nur zur Verfügung, wenn der 1.
Überschleifparameter definiert ist.
C_DIS
: Distanzparameter: Das Überschleifen be-
ginnt frühestens, wenn die Entfernung zum Ziel-
punkt den Wert von $APO.CDIS unterschreitet.
Voraussetzung für C_DIS: 1. Überschleifparameter
ist C_PTP.
C_VEL
: Geschwindigkeitsparameter: Das Über-
schleifen beginnt frühestens, wenn die Geschwin-
digkeit in der Abbremsphase zum Zielpunkt hin den
Wert von $APO.CVEL unterschreitet.
C_ORI
: Orientierungsparameter: Das Überschlei-
fen beginnt frühestens, wenn der dominierende Ori-
entierungswinkel den Wert von $APO.CORI
unterschreitet.
Entfernen
: Löscht die Überschleifparameter
Touch Up
Übernimmt die aktuelle kartesische Roboterposition als
Zielpunkt
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
6 Programmierung
6.3
Inline-Formular PTP_REL
Aufruf
Menüfolge Befehle > KRL-Assistent > PTP_REL wählen.
Beschreibung
Führt eine Punkt-zu-Punkt-Bewegung zum Zielpunkt aus. Die Koordinaten
des Zielpunkts sind relativ zur aktuellen Position.
Folgende Schaltflächen stehen zur Verfügung:
Eine REL-Anweisung bezieht sich immer auf die aktuelle Roboterpo-
sition. Wenn eine REL-Bewegung abgebrochen wurde, fährt der Ro-
boter deswegen von der Abbruch-Position aus noch einmal die
komplette REL-Bewegung.
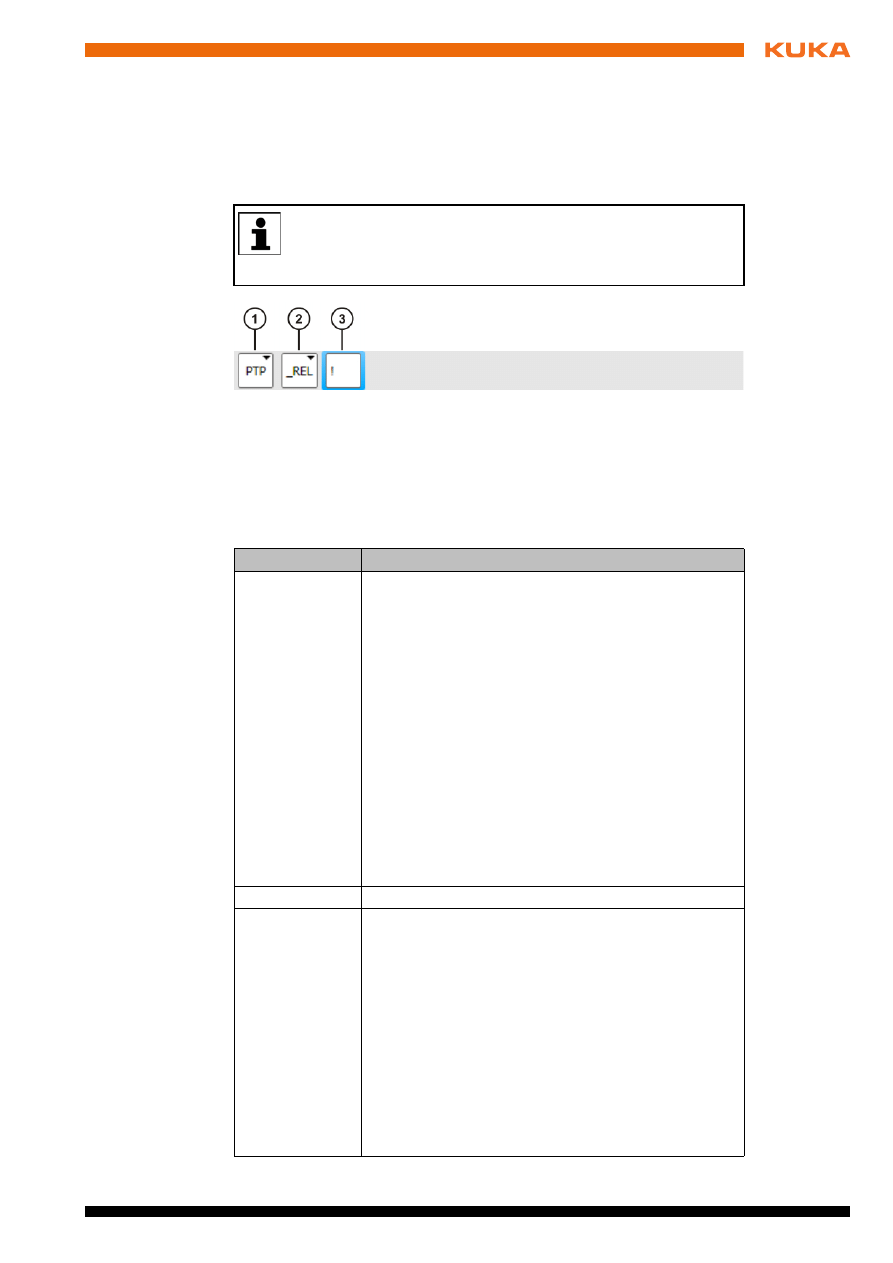
Abb. 6-3: KRL-Assistent Inline-Formular PTP_REL
1
Bewegungsart PTP
2
Bewegungsart _REL
3
Platzhalter für den Zielpunkt
Schaltfläche
Beschreibung
{?}
Öffnet ein Menü mit den Datentypen, die zum Spei-
chern des Zielpunkts zur Verfügung stehen
Kartesische Datentypen:
E6POS
POS
FRAME
Die kartesischen Koordinaten beziehen sich auf das
BASE-Koordinatensystem.
Achsspezifische Datentypen:
E6AXIS
AXIS
Platzhalter für den Zielpunkt:
!
PTP
Schaltet zur PTP-Bewegung
Cont
Öffnet ein Menü zur Angabe des 1. Überschleifparame-
ters
C_DIS
: Distanzparameter: Das Überschleifen be-
ginnt frühestens, wenn die Entfernung zum Ziel-
punkt den Wert von $APO.CDIS unterschreitet.
C_PTP
: Der Zielpunkt wird überschliffen.
Entfernen
: Löscht die Überschleifparameter
Beim PTP-PTP-Überschleifen genügt die Angabe des
1. Überschleifparameters. Beim PTP-CP-Überschlei-
fen, d. h. wenn nach dem überschliffenen PTP-Satz ein
LIN- oder CIRC-Satz folgt, muss zusätzlich ein 2. Über-
schleifparameter angegeben werden.
18 / 43
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
6.4
Inline-Formular LIN
Aufruf
Menüfolge Befehle > KRL-Assistent > LIN wählen.
Beschreibung
Führt eine Linearbewegung zum Zielpunkt aus. Die Koordinaten des Ziel-
punkts sind absolut.
Folgende Schaltflächen stehen zur Verfügung:
2. Cont
Öffnet ein Menü zur Angabe des 2. Überschleifparame-
ters
Diese Schaltfläche steht nur zur Verfügung, wenn der 1.
Überschleifparameter definiert ist.
C_DIS
: Distanzparameter: Das Überschleifen be-
ginnt frühestens, wenn die Entfernung zum Ziel-
punkt den Wert von $APO.CDIS unterschreitet.
Voraussetzung für C_DIS: 1. Überschleifparameter
ist C_PTP.
C_VEL
: Geschwindigkeitsparameter: Das Über-
schleifen beginnt frühestens, wenn die Geschwin-
digkeit in der Abbremsphase zum Zielpunkt hin den
Wert von $APO.CVEL unterschreitet.
C_ORI
: Orientierungsparameter: Das Überschlei-
fen beginnt frühestens, wenn der dominierende Ori-
entierungswinkel den Wert von $APO.CORI
unterschreitet.
Entfernen
: Löscht die Überschleifparameter
Touch Up
Bei einer REL-Bewegung ohne Funktion
Schaltfläche
Beschreibung
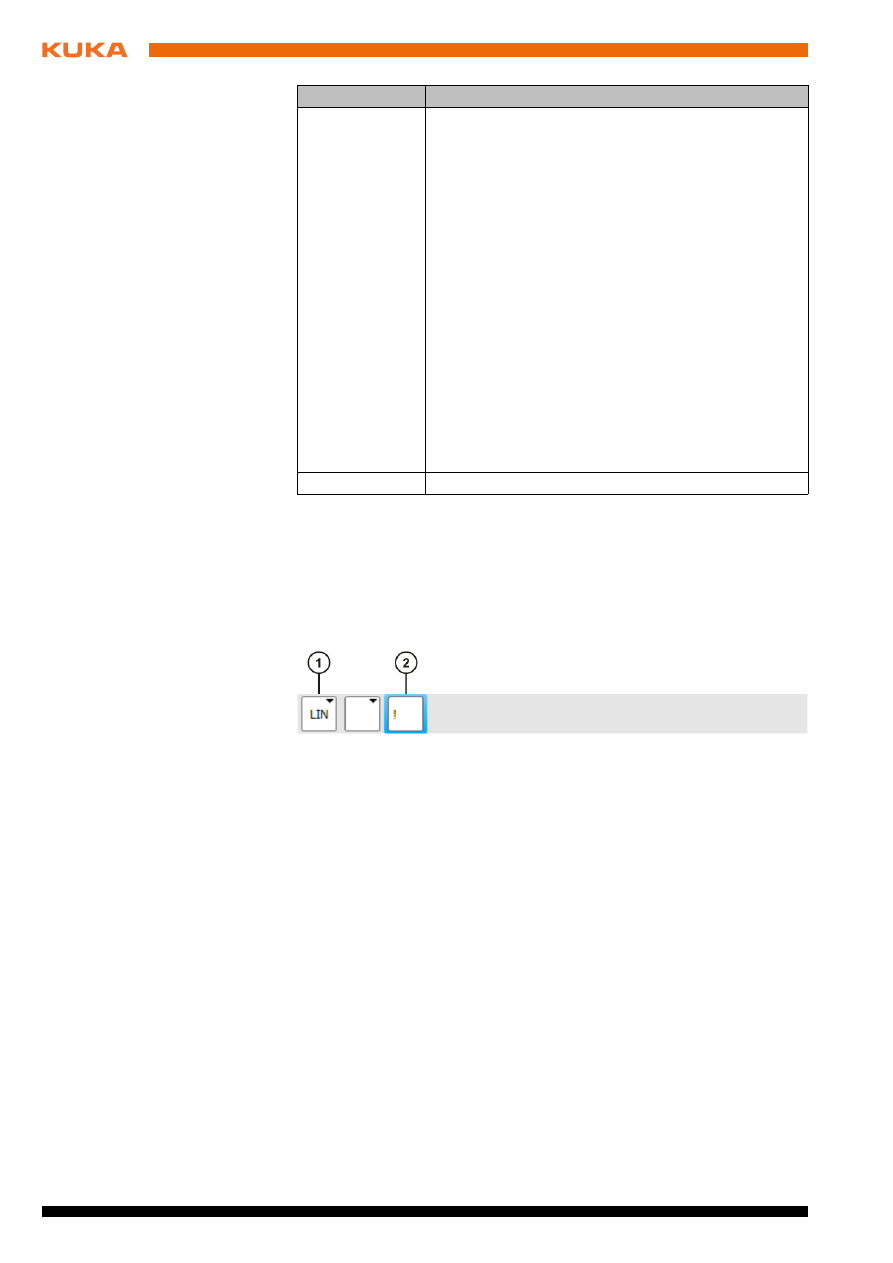
Abb. 6-4: KRL-Assistent Inline-Formular LIN
1
Bewegungsart LIN
2
Platzhalter für den Zielpunkt

Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
6 Programmierung
6.5
Inline-Formular LIN_REL
Aufruf
Menüfolge Befehle > KRL-Assistent > LIN_REL wählen.
Schaltfläche
Beschreibung
{?}
Öffnet ein Menü mit den Datentypen, die zum Spei-
chern des Zielpunkts zur Verfügung stehen
Kartesische Datentypen:
E6POS
POS
FRAME
Die kartesischen Koordinaten beziehen sich auf das
BASE-Koordinatensystem.
Platzhalter für den Zielpunkt:
!
LIN
Öffnet ein Menü zum Umschalten der Bewegungsart
CIRC
: CIRC-Bewegung
REL
: LIN_REL-Bewegung
Cont
Öffnet ein Menü zur Angabe des 1. Überschleifparame-
ters
C_DIS
: Distanzparameter: Das Überschleifen be-
ginnt frühestens, wenn die Entfernung zum Ziel-
punkt den Wert von $APO.CDIS unterschreitet.
C_VEL
: Geschwindigkeitsparameter: Das Über-
schleifen beginnt frühestens, wenn die Geschwin-
digkeit in der Abbremsphase zum Zielpunkt hin den
Wert von $APO.CVEL unterschreitet.
C_ORI
: Orientierungsparameter: Das Überschlei-
fen beginnt frühestens, wenn der dominierende Ori-
entierungswinkel den Wert von $APO.CORI
unterschreitet.
Entfernen
: Löscht die Überschleifparameter
Beim CP-CP-Überschleifen genügt die Angabe des 1.
Überschleifparameters. Beim CP-PTP-Überschleifen,
d. h. wenn nach dem überschliffenen CP-Satz ein PTP-
Satz folgt, muss zusätzlich ein 2. Überschleifparameter
angegeben werden.
2. Cont
Öffnet ein Menü zur Angabe des 2. Überschleifparame-
ters
Diese Schaltfläche steht nur zur Verfügung, wenn der 1.
Überschleifparameter definiert ist.
C_DIS
: Distanzparameter: Das Überschleifen be-
ginnt frühestens, wenn die Entfernung zum Ziel-
punkt den Wert von $APO.CDIS unterschreitet.
Voraussetzung für C_DIS: 1. Überschleifparameter
ist C_VEL oder C_ORI.
C_PTP
: Der Zielpunkt wird überschliffen.
Entfernen
: Löscht die Überschleifparameter
Touch Up
Übernimmt die aktuelle kartesische Roboterposition als
Zielpunkt
20 / 43
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
Beschreibung
Führt eine Linearbewegung zum Zielpunkt aus. Die Koordinaten des Ziel-
punkts sind relativ zur aktuellen Position.
Folgende Schaltflächen stehen zur Verfügung:
Eine REL-Anweisung bezieht sich immer auf die aktuelle Roboterpo-
sition. Wenn eine REL-Bewegung abgebrochen wurde, fährt der Ro-
boter deswegen von der Abbruch-Position aus noch einmal die
komplette REL-Bewegung.
Abb. 6-5: KRL-Assistent Inline-Formular LIN_REL
1
Bewegungsart LIN
2
Bewegungsart _REL
3
Platzhalter für den Zielpunkt
Schaltfläche
Beschreibung
{?}
Öffnet ein Menü mit den Datentypen, die zum Spei-
chern des Zielpunkts zur Verfügung stehen
Kartesische Datentypen:
E6POS
POS
FRAME
Die kartesischen Koordinaten des Zielpunkts können
sich auf das BASE- oder auf das TOOL-Koordinaten-
system beziehen. (Schaltfläche Tool/Base)
Platzhalter für den Zielpunkt:
!
LIN
Schaltet zur LIN-Bewegung
Tool/Base
Öffnet ein Menü zur Angabe des Bezugssystems für die
Zielpunkt-Koordinaten
TOOL
: Die Koordinaten beziehen sich auf das
TOOL-Koordinatensystem.
BASE
: Die Koordinaten beziehen sich auf das
BASE-Koordinatensystem. (Default)
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
6 Programmierung
6.6
Inline-Formular CIRC
Aufruf
Menüfolge Befehle > KRL-Assistent > CIRC wählen.
Beschreibung
Führt eine Kreisbewegung aus. Damit die Steuerung die Kreisbewegung be-
rechnen kann, müssen ein Hilfspunkt und ein Zielpunkt angegeben werden.
Die Koordinaten von Hilfs- und Zielpunkt sind absolut. Der Hilfspunkt kann
nicht überschliffen werden. Er wird immer genau angefahren.
Folgende Schaltflächen stehen zur Verfügung:
Cont
Öffnet ein Menü zur Angabe des 1. Überschleifparame-
ters
C_DIS
: Distanzparameter: Das Überschleifen be-
ginnt frühestens, wenn die Entfernung zum Ziel-
punkt den Wert von $APO.CDIS unterschreitet.
C_VEL
: Geschwindigkeitsparameter: Das Über-
schleifen beginnt frühestens, wenn die Geschwin-
digkeit in der Abbremsphase zum Zielpunkt hin den
Wert von $APO.CVEL unterschreitet.
C_ORI
: Orientierungsparameter: Das Überschlei-
fen beginnt frühestens, wenn der dominierende Ori-
entierungswinkel den Wert von $APO.CORI
unterschreitet.
Entfernen
: Löscht die Überschleifparameter
Beim CP-CP-Überschleifen genügt die Angabe des 1.
Überschleifparameters. Beim CP-PTP-Überschleifen,
d. h. wenn nach dem überschliffenen CP-Satz ein PTP-
Satz folgt, muss zusätzlich ein 2. Überschleifparameter
angegeben werden.
2. Cont
Öffnet ein Menü zur Angabe des 2. Überschleifparame-
ters
Diese Schaltfläche steht nur zur Verfügung, wenn der 1.
Überschleifparameter definiert ist.
C_DIS
: Distanzparameter: Das Überschleifen be-
ginnt frühestens, wenn die Entfernung zum Ziel-
punkt den Wert von $APO.CDIS unterschreitet.
Voraussetzung für C_DIS: 1. Überschleifparameter
ist C_VEL oder C_ORI.
C_PTP
: Der Zielpunkt wird überschliffen.
Entfernen
: Löscht die Überschleifparameter
Touch Up
Bei einer REL-Bewegung ohne Funktion
Schaltfläche
Beschreibung
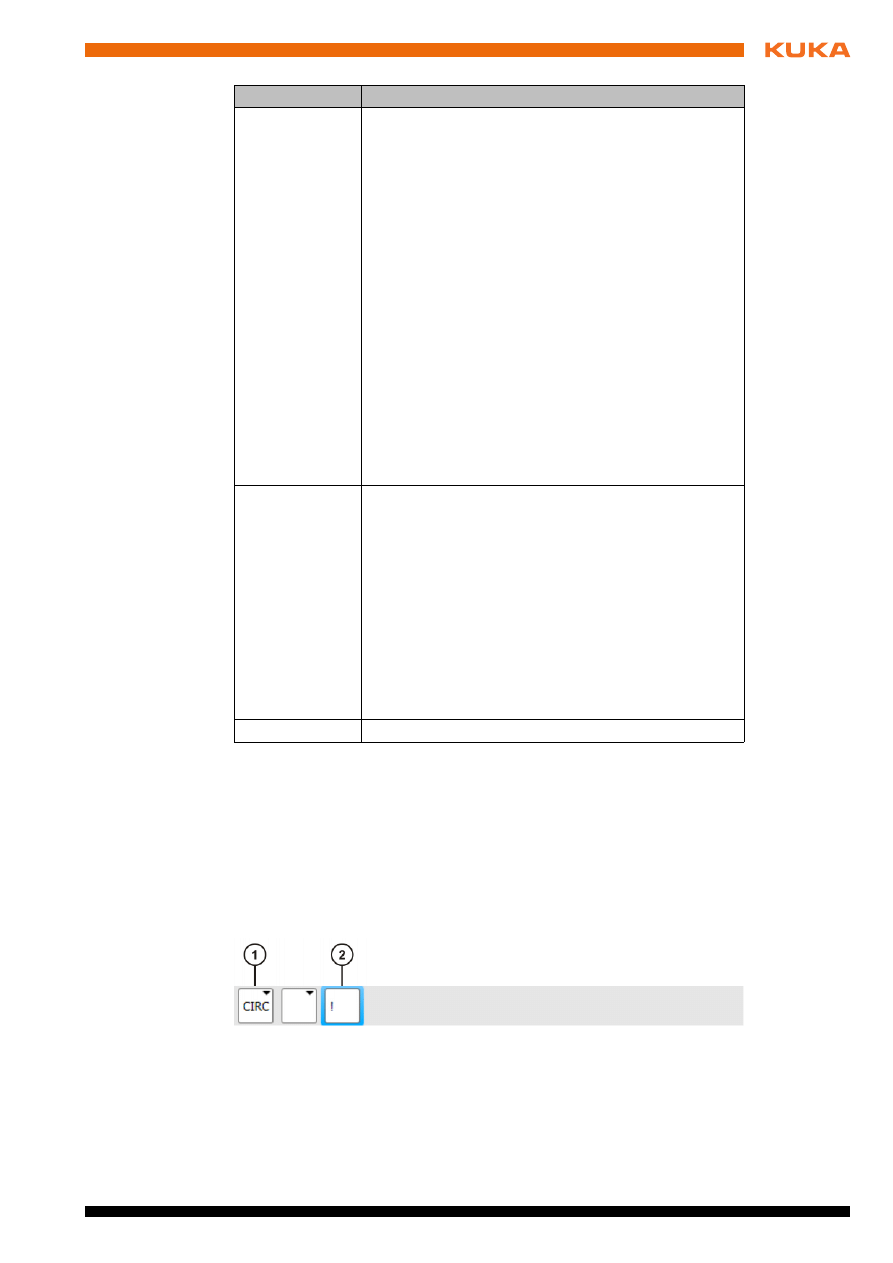
Abb. 6-6: KRL-Assistent Inline-Formular CIRC
1
Bewegungsart CIRC
2
Platzhalter für den Hilfspunkt
22 / 43
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
Schaltfläche
Beschreibung
{?}
Öffnet ein Menü mit den Datentypen, die zum Spei-
chern des Zielpunkts zur Verfügung stehen
Kartesische Datentypen:
E6POS
POS
FRAME
Die kartesischen Koordinaten beziehen sich auf das
BASE-Koordinatensystem.
Platzhalter für den Hilfs- oder Zielpunkt:
!
CIRC
Öffnet ein Menü zur Angabe des Kreiswinkels und zum
Umschalten der Bewegungsart
PTP
: PTP-Bewegung
REL
: CIRC_REL-Bewegung
CA
: Der Kreiswinkel gibt den Gesamtwinkel der
Kreisbewegung an. Ermöglicht dadurch eine Ver-
längerung der Bewegung über den programmierten
Zielpunkt hinaus oder auch eine Verkürzung. Der
tatsächliche Zielpunkt entspricht dadurch nicht
mehr dem programmierten Zielpunkt.
Einheit: Grad. Keine Begrenzung; insbesondere
kann ein Kreiswinkel größer als 360° programmiert
werden.
Kreiswinkel positiv: Kreisbahn wird in Richtung
Startpunkt › Hilfspunkt › Zielpunkt abgefahren.
Kreiswinkel negativ: Kreisbahn wird in Richtung
Startpunkt › Zielpunkt › Hilfspunkt abgefahren.
Cont
Öffnet ein Menü zur Angabe des 1. Überschleifparame-
ters
C_DIS
: Distanzparameter: Das Überschleifen be-
ginnt frühestens, wenn die Entfernung zum Ziel-
punkt den Wert von $APO.CDIS unterschreitet.
C_VEL
: Geschwindigkeitsparameter: Das Über-
schleifen beginnt frühestens, wenn die Geschwin-
digkeit in der Abbremsphase zum Zielpunkt hin den
Wert von $APO.CVEL unterschreitet.
C_ORI
: Orientierungsparameter: Das Überschlei-
fen beginnt frühestens, wenn der dominierende Ori-
entierungswinkel den Wert von $APO.CORI
unterschreitet.
Entfernen
: Löscht die Überschleifparameter
Beim CP-CP-Überschleifen genügt die Angabe des 1.
Überschleifparameters. Beim CP-PTP-Überschleifen,
d. h. wenn nach dem überschliffenen CP-Satz ein PTP-
Satz folgt, muss zusätzlich ein 2. Überschleifparameter
angegeben werden.
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
6 Programmierung
6.7
Inline-Formular CIRC_REL
Aufruf
Menüfolge Befehle > KRL-Assistent > CIRC_REL wählen.
Beschreibung
Führt eine Kreisbewegung aus. Damit die Steuerung die Kreisbewegung be-
rechnen kann, müssen ein Hilfspunkt und ein Zielpunkt angegeben werden.
Die Koordinaten von Hilfs- und Zielpunkt sind relativ zur aktuellen Position.
Der Hilfspunkt kann nicht überschliffen werden. Er wird immer genau angefah-
ren.
Folgende Schaltflächen stehen zur Verfügung:
2. Cont
Öffnet ein Menü zur Angabe des 2. Überschleifparame-
ters
Diese Schaltfläche steht nur zur Verfügung, wenn der 1.
Überschleifparameter definiert ist.
C_DIS
: Distanzparameter: Das Überschleifen be-
ginnt frühestens, wenn die Entfernung zum Ziel-
punkt den Wert von $APO.CDIS unterschreitet.
Voraussetzung für C_DIS: 1. Überschleifparameter
ist C_VEL oder C_ORI.
C_PTP
: Der Zielpunkt wird überschliffen.
Entfernen
: Löscht die Überschleifparameter
Touch Up
Übernimmt die aktuelle kartesische Roboterposition als
Hilfs- oder Zielpunkt
Schaltfläche
Beschreibung
Eine REL-Anweisung bezieht sich immer auf die aktuelle Roboterpo-
sition. Wenn eine REL-Bewegung abgebrochen wurde, fährt der Ro-
boter deswegen von der Abbruch-Position aus noch einmal die
komplette REL-Bewegung.
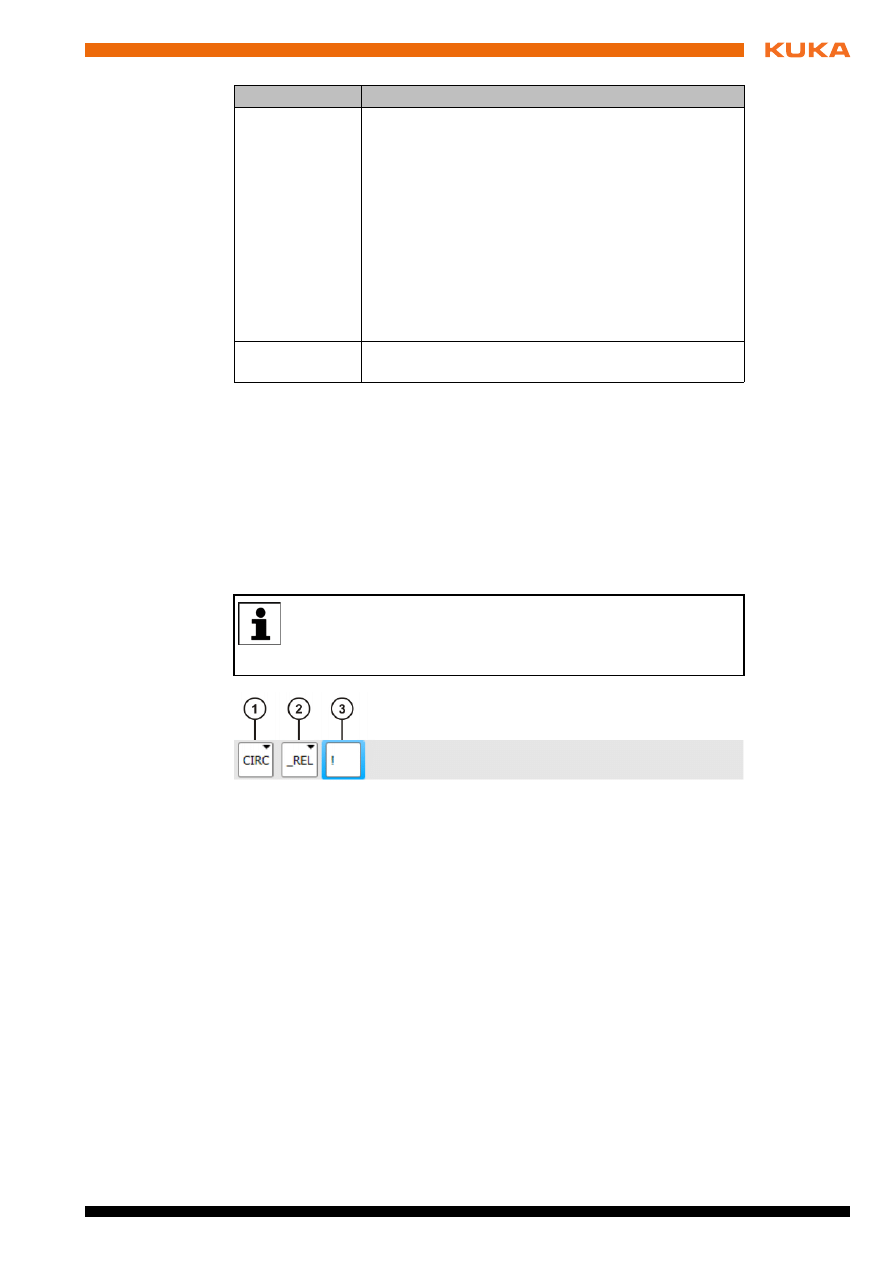
Abb. 6-7: KRL-Assistent Inline-Formular CIRC_REL
1
Bewegungsart CIRC
2
Bewegungsart _REL
3
Platzhalter für den Hilfspunkt
24 / 43
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
Schaltfläche
Beschreibung
{?}
Öffnet ein Menü mit den Datentypen, die zum Spei-
chern des Zielpunkts zur Verfügung stehen
Kartesische Datentypen:
E6POS
POS
FRAME
Die kartesischen Koordinaten beziehen sich auf das
BASE-Koordinatensystem.
Platzhalter für den Hilfs- oder Zielpunkt:
!
CIRC
Öffnet ein Menü zur Angabe des Kreiswinkels und zum
Umschalten der Bewegungsart
CIRC
: CIRC-Bewegung
CA
: Der Kreiswinkel gibt den Gesamtwinkel der
Kreisbewegung an. Ermöglicht dadurch eine Ver-
längerung der Bewegung über den programmierten
Zielpunkt hinaus oder auch eine Verkürzung. Der
tatsächliche Zielpunkt entspricht dadurch nicht
mehr dem programmierten Zielpunkt.
Einheit: Grad. Keine Begrenzung; insbesondere
kann ein Kreiswinkel größer als 360° programmiert
werden.
Kreiswinkel positiv: Kreisbahn wird in Richtung
Startpunkt › Hilfspunkt › Zielpunkt abgefahren.
Kreiswinkel negativ: Kreisbahn wird in Richtung
Startpunkt › Zielpunkt › Hilfspunkt abgefahren.
Cont
Öffnet ein Menü zur Angabe des 1. Überschleifparame-
ters
C_DIS
: Distanzparameter: Das Überschleifen be-
ginnt frühestens, wenn die Entfernung zum Ziel-
punkt den Wert von $APO.CDIS unterschreitet.
C_VEL
: Geschwindigkeitsparameter: Das Über-
schleifen beginnt frühestens, wenn die Geschwin-
digkeit in der Abbremsphase zum Zielpunkt hin den
Wert von $APO.CVEL unterschreitet.
C_ORI
: Orientierungsparameter: Das Überschlei-
fen beginnt frühestens, wenn der dominierende Ori-
entierungswinkel den Wert von $APO.CORI
unterschreitet.
Entfernen
: Löscht die Überschleifparameter
Beim CP-CP-Überschleifen genügt die Angabe des 1.
Überschleifparameters. Beim CP-PTP-Überschleifen,
d. h. wenn nach dem überschliffenen CP-Satz ein PTP-
Satz folgt, muss zusätzlich ein 2. Überschleifparameter
angegeben werden.
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
6 Programmierung
6.8
Spline-Bewegungen
6.8.1
Inline-Formular SPL
Aufruf
Menüfolge Befehle > KRL-Assistent > Spline Befehle > SPL wählen.
Beschreibung
SPL kann nur als Segment in einem Spline-Block programmiert werden. Es ist
nicht möglich, eine SPL-Einzelbewegung zu programmieren.
Folgende Schaltflächen stehen zur Verfügung:
2. Cont
Öffnet ein Menü zur Angabe des 2. Überschleifparame-
ters
Diese Schaltfläche steht nur zur Verfügung, wenn der 1.
Überschleifparameter definiert ist.
C_DIS
: Distanzparameter: Das Überschleifen be-
ginnt frühestens, wenn die Entfernung zum Ziel-
punkt den Wert von $APO.CDIS unterschreitet.
Voraussetzung für C_DIS: 1. Überschleifparameter
ist C_VEL oder C_ORI.
C_PTP
: Der Zielpunkt wird überschliffen.
Entfernen
: Löscht die Überschleifparameter
Touch Up
Bei einer REL-Bewegung ohne Funktion
Schaltfläche
Beschreibung
Weitere Informationen zur Bewegungsprogrammierung mit Spline
sind in der Bedien- und Programmieranleitung für Systemintegrato-
ren zu finden.
Abb. 6-8: KRL-Assistent Inline-Formular SPL
1
Bewegungsart SPL
2
Platzhalter für den Zielpunkt
Schaltfläche
Beschreibung
{?}
Öffnet ein Menü mit den Datentypen, die zum Spei-
chern des Zielpunkts zur Verfügung stehen
Kartesische Datentypen:
E6POS
POS
FRAME
Die kartesischen Koordinaten beziehen sich auf das
BASE-Koordinatensystem.
Platzhalter für den Zielpunkt:
!
SLIN/SCIRC
Schaltet zur SLIN-Bewegung
Entfernen
Löscht eine markierte Systemvariable
26 / 43
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
6.8.2
Inline-Formular SLIN
Aufruf
Menüfolge Befehle > KRL-Assistent > Spline Befehle > SLIN wählen.
Beschreibung
SLIN kann als Einzelbewegung programmiert werden oder als Segment in ei-
nem Spline-Block.
Folgende Schaltflächen stehen zur Verfügung:
AddParam
Öffnet ein Menü zum Einfügen einer Systemvariablen.
Der Systemvariablen wird ein Default-Wert zugewie-
sen. Dieser Wert kann editiert werden.
VEL
: $VEL für die Bahngeschwindigkeit
ACC
: $ACC für die Bahnbeschleunigung
ORI
: $ORI_TYPE für die Orientierungsführung
JERK
: $JERK für die Ruckbegrenzung
Löschen
: Löscht eine markierte Systemvariable
Touch Up
Übernimmt die aktuelle kartesische Roboterposition als
Zielpunkt
Die Wertzuweisung an eine Systemvariable gilt nur für das zugehö-
rige Spline-Segment. Sie wirkt sich nicht auf nachfolgende Segmen-
te in einem Spline-Block aus.
Detaillierte Informationen zu den Systemvariablen sind in der Doku-
mentation Systemvariablen zu finden.
Schaltfläche
Beschreibung
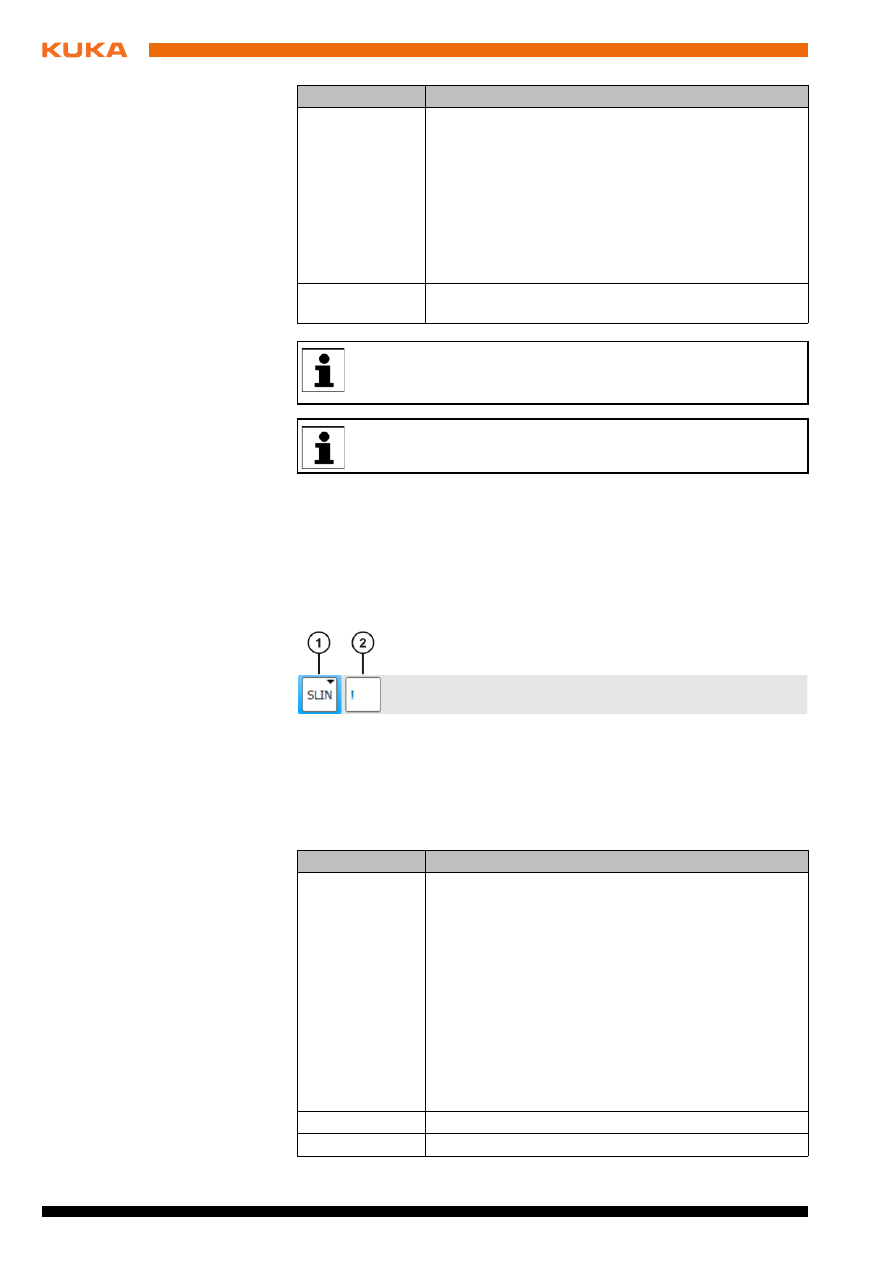
Abb. 6-9: KRL-Assistent Inline-Formular SLIN
1
Bewegungsart SLIN
2
Platzhalter für den Zielpunkt
Schaltfläche
Beschreibung
{?}
Öffnet ein Menü mit den Datentypen, die zum Spei-
chern des Zielpunkts zur Verfügung stehen
Kartesische Datentypen:
E6POS
POS
FRAME
Die kartesischen Koordinaten beziehen sich auf das
BASE-Koordinatensystem.
Platzhalter für den Zielpunkt:
!
SCIRC/SPL
Schaltet zur SCIRC-Bewegung
Entfernen
Löscht eine markierte Systemvariable
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
6 Programmierung
6.8.3
Inline-Formular SCIRC
Aufruf
Menüfolge Befehle > KRL-Assistent > Spline Befehle > SCIRC wählen.
Beschreibung
SCIRC kann als Einzelbewegung programmiert werden oder als Segment in
einem Spline-Block.
Folgende Schaltflächen stehen zur Verfügung:
AddParam
Öffnet ein Menü zum Einfügen einer Systemvariablen.
Der Systemvariablen wird ein Default-Wert zugewie-
sen. Dieser Wert kann editiert werden.
VEL
: $VEL für die Bahngeschwindigkeit
ACC
: $ACC für die Bahnbeschleunigung
ORI
: $ORI_TYPE für die Orientierungsführung
JERK
: $JERK für die Ruckbegrenzung
Löschen
: Löscht eine markierte Systemvariable
Touch Up
Übernimmt die aktuelle kartesische Roboterposition als
Zielpunkt
Die Wertzuweisung an eine Systemvariable gilt nur für das zugehö-
rige Spline-Segment. Sie wirkt sich nicht auf nachfolgende Segmen-
te in einem Spline-Block aus.
Detaillierte Informationen zu den Systemvariablen sind in der Doku-
mentation Systemvariablen zu finden.
Schaltfläche
Beschreibung
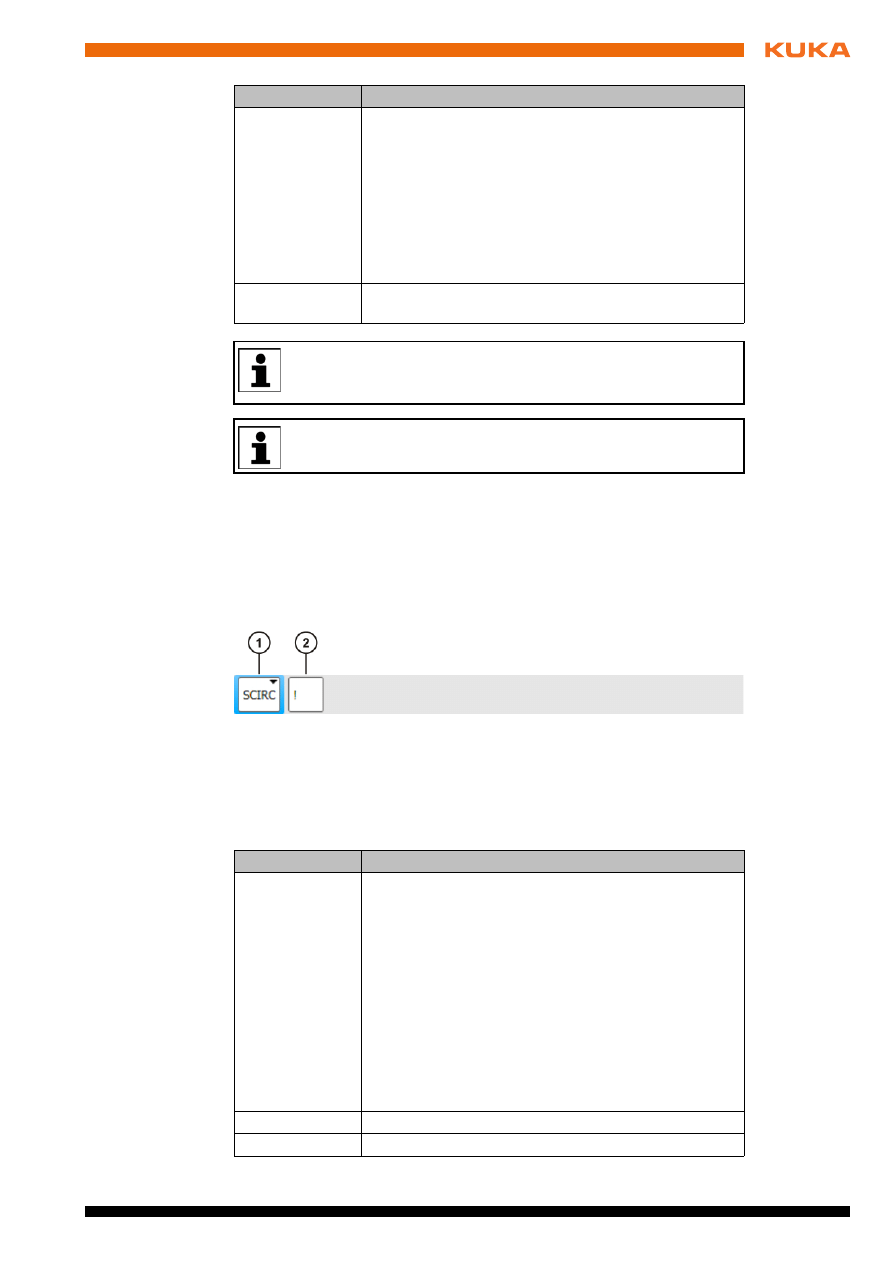
Abb. 6-10: KRL-Assistent Inline-Formular SCIRC
1
Bewegungsart SCIRC
2
Platzhalter für den Hilfspunkt
Schaltfläche
Beschreibung
{?}
Öffnet ein Menü mit den Datentypen, die zum Spei-
chern des Zielpunkts zur Verfügung stehen
Kartesische Datentypen:
E6POS
POS
FRAME
Die kartesischen Koordinaten beziehen sich auf das
BASE-Koordinatensystem.
Platzhalter für den Hilfs- oder Zielpunkt:
!
SPL/SLIN
Schaltet zur SPL-Bewegung
Entfernen
Löscht eine markierte Systemvariable
28 / 43
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
6.9
Bewegung mit Platzhalter
Wenn beim Erstellen eines KRL-Programms die Position ein oder mehrerer
Zielpunkte noch nicht bekannt ist, können die Bewegungen mit Platzhalter ein-
gefügt werden.
Beim späteren Programmablauf stoppt das Programm in den Zeilen mit Platz-
halter und die Roboterpositionen können übernommen werden.
6.10
Roboterposition übernehmen
Roboterpositionen können auf folgende Arten im Inline-Formular übernom-
men werden:
Zielpunkt teachen.
(
>>>
6.10.1 "Zielpunkt teachen" Seite 28)
Zielpunkt als Variable teachen.
(
>>>
6.10.2 "Zielpunkt als Variable teachen" Seite 29)
Koordinaten für den Zielpunkt manuell eingeben.
(
>>>
6.10.3 "Koordinaten für den Zielpunkt eingeben" Seite 29)
6.10.1
Zielpunkt teachen
Voraussetzung
Programm ist angewählt.
Betriebsart T1 oder T2
AddParam
Öffnet ein Menü zum Einfügen einer Systemvariablen.
Der Systemvariablen wird ein Default-Wert zugewie-
sen. Dieser Wert kann editiert werden.
VEL
: $VEL für die Bahngeschwindigkeit
ACC
: $ACC für die Bahnbeschleunigung
ORI
: $ORI_TYPE für die Orientierungsführung
CIRC Type
: $CIRC_TYPE für die Orientierungsfüh-
rung des Kreises
JERK
: $JERK für die Ruckbegrenzung
Löschen
: Löscht eine markierte Systemvariable
Touch Up
Übernimmt die aktuelle kartesische Roboterposition als
Hilfs- oder Zielpunkt
Die Wertzuweisung an eine Systemvariable gilt nur für das zugehö-
rige Spline-Segment. Sie wirkt sich nicht auf nachfolgende Segmen-
te in einem Spline-Block aus.
Detaillierte Informationen zu den Systemvariablen sind in der Doku-
mentation Systemvariablen zu finden.
Schaltfläche
Beschreibung
Bevor Roboterpositionen in ein Inline-Formular übernommen werden
können, müssen Werkzeug und Basis definiert sein. Dies wird bei-
spielsweise errreicht, indem die INI-Zeile des Programms durchlau-
fen wird.
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
6 Programmierung
Vorgehensweise
1. Den TCP an die Position verfahren, die als Zielpunkt geteacht werden soll.
2. Touch Up drücken, um die aktuelle Position des TCP als Zielpunkt zu
übernehmen, und die Sicherheitsabfrage mit Ja beantworten.
3. Anweisung mit Befehl OK speichern.
Beispiel
6.10.2
Zielpunkt als Variable teachen
Voraussetzung
Programm ist angewählt.
Betriebsart T1 oder T2
Vorgehensweise
1. Den TCP an die Position verfahren, die als Zielpunkt übernommen werden
soll.
2. Einen Namen für die Variable eingeben.
3. Auf {?} drücken. Ein Menü zur Auswahl des Datentyps öffnet sich. Die zur
Auswahl stehenden Datentypen sind abhängig von der Bewegungsart.
4. Datentyp auswählen, um die aktuelle Position des TCP als Zielpunkt zu
übernehmen, und die Sicherheitsabfrage mit Ja beantworten.
5. Anweisung mit Befehl OK speichern.
6.10.3
Koordinaten für den Zielpunkt eingeben
Voraussetzung
Programm ist angewählt.
Betriebsart T1 oder T2
Für den Touch Up muss das Feld für den Zielpunkt im Fokus sein.
Abb. 6-11: KRL-Assistent Inline-Formular PTP (Zielpunkt Typ Pos)
Bevor Roboterpositionen in ein Inline-Formular übernommen werden
können, müssen Werkzeug und Basis definiert sein. Dies wird bei-
spielsweise errreicht, indem die INI-Zeile des Programms durchlau-
fen wird.
Für den Touch Up muss das Feld für den Zielpunkt im Fokus sein.
Es dürfen keine für KRL reservierten Schlüsselwörter verwendet
werden. Weitere Informationen zu den Schlüsselwörtern sind in der
Bedien- und Programmieranleitung für Systemintegratoren zu fin-
den.
Bevor Roboterpositionen in ein Inline-Formular übernommen werden
können, müssen Werkzeug und Basis definiert sein. Dies wird bei-
spielsweise errreicht, indem die INI-Zeile des Programms durchlau-
fen wird.
Für den Touch Up muss das Feld für den Zielpunkt im Fokus sein.
30 / 43
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
Vorgehensweise
1. Auf {?} drücken. Ein Menü zur Auswahl des Datentyps öffnet sich. Die zur
Auswahl stehenden Datentypen sind abhängig von der Bewegungsart.
2. Datentyp auswählen, um die aktuelle Position des TCP als Zielpunkt zu
übernehmen.
3. Positionsangaben im Editiermodus ändern.
4. Anweisung mit Befehl OK speichern.
6.11
Datentypen für die Bewegungsprogrammierung
Folgende Datentypen für die Bewegungsprogrammierung sind vordefiniert:
Strukturtyp AXIS
A1 bis A6 sind Winkelwerte (rotatorische Achsen) oder Translationswerte
(translatorische Achsen) zum achsspezifischen Verfahren der Roboterachsen
1 bis 6.
Strukturtyp E6AXIS
E1 bis E6 sind Winkel- oder Translationswerte der Zusatzachsen 7 bis 12.
Strukturtyp FRAME
X, Y, Z sind Raumkoordinaten und A, B, C die Orientierung des Koordinaten-
systems.
Strukturtypen POS und E6POS
S (Status) und T (Turn) legen Achsstellungen eindeutig fest.
STRUC AXIS REAL A1, A2, A3, A4, A5, A6
STRUC E6AXIS REAL A1, A2, A3, A4, A5, A6, E1, E2, E3, E4, E5, E6
STRUC FRAME REAL X, Y, Z, A, B, C
STRUC POS REAL X, Y, Z, A, B, C, INT S, T
STRUC E6POS REAL X, Y, Z, A, B, C, E1, E2, E3, E4, E5, E6, INT S, T
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
7 Meldungen
7
Meldungen
Bei Bedien- oder Programmierfehlern kann es zu Fehlermeldungen kommen.
Meldung
Ursache
Abhilfe
Ungültiger Überschleif
Parameter!
Die gewählte Kombination der
Überschleifparameter ist ungül-
tig.
Überschleifparameter ändern.
TouchUp fehlgeschlagen.
Es konnte kein Punkt geteacht
werden.
---
Unzulässigen Wert gefun-
den.
Ungültiger Wert im Inline-For-
mular
Gültigen Wert eingeben.
Ungültiger Wert für {0}
Parameter
Keine Wertzuweisung an Sys-
temvariable (Feld ist leer)
Der Systemvariablen einen gül-
tigen Wert zuweisen.
Variable konnte nicht ange-
legt werden. Zieltyp unbe-
kannt.
Befehl Touch Up wurde auf
einen nicht geometrischen Aus-
druck ausgeführt.
Der Variablen, auf die der
Befehl Touch Up ausgeführt
wird, den richtigen Datentyp
zuweisen:
PTP-Bewegung: FRAME,
POS oder E6POS
CP-Bewegung: AXIS,
E6AXIS, FRAME, POS
oder E6POS
Ersten Überschleif Parame-
ter einfügen.
Der erste Überschleifparameter
ist nicht korrekt eingegeben.
Korrekten ersten Überschleif-
parameter eingeben.
Wertzuweisung an die Vari-
able "{0}" fehlgeschlagen.
Falscher Datentyp
Variable deklarieren und richti-
gen Datentyp zuweisen.
Änderung des Strukturtyps
von " {0}" nach " {1}" nicht
möglich.
Die Datentypen der angezeig-
ten Variablen sind nicht kompa-
tibel, z. B. POS<>AXIS.
Ziel- und Quelltyp anpassen.
Base-Koordinatensystem
undefiniert.
$BASE ist nicht definiert.
$BASE definieren.
Werkzeug-Koordinatensys-
tem undefiniert.
$TOOL ist nicht definiert.
$TOOL definieren.
Befehl wird vom KRL-Assis-
tenten nicht unterstützt.
Befehl Ändern wird nicht unter-
stützt.
---
Unbekannte Variable "{0}"
Variable ist nicht deklariert.
Variable deklarieren.
Selektierter Parameter kann
nicht entfernt werden!
Der ausgewählte Parameter
kann mit der Schaltfläche Ent-
fernen
nicht entfernt werden.
---
Funktion für WITH- Para-
meter nicht möglich!
Die über die Schaltfläche auf-
gerufene Funktion wird nicht
unterstützt.
---
Kommando nicht eindeutig,
TouchUp nicht möglich.
Das falsche Feld ist im Fokus.
Es konnte kein Punkt geteacht
werden.
Fokus auf das Feld für den
Hilfs- oder Zielpunkt setzen
und auf Touch Up drücken.
Variable konnte nicht ange-
legt werden. Zieltyp unbe-
kannt.
Befehl Touch Up wurde auf
einen nicht geometrischen Aus-
druck ausgeführt.
Der Variablen, auf die der
Befehl Touch Up ausgeführt
wird, den richtigen Datentyp
zuweisen:
PTP-Bewegung: FRAME,
POS oder E6POS
CP-Bewegung: AXIS,
E6AXIS, FRAME, POS
oder E6POS


Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
8 KUKA Service
8
KUKA Service
8.1
Support-Anfrage
Einleitung
Die Dokumentation der KUKA Roboter GmbH bietet Informationen zu Betrieb
und Bedienung und unterstützt Sie bei der Behebung von Störungen. Für wei-
tere Anfragen steht Ihnen die lokale Niederlassung zur Verfügung.
Informationen
Zur Abwicklung einer Anfrage werden folgende Informationen benötigt:
Typ und Seriennummer des Roboters
Typ und Seriennummer der Steuerung
Typ und Seriennummer der Lineareinheit (optional)
Version der KUKA System Software
Optionale Software oder Modifikationen
Archiv der Software
Vorhandene Applikation
Vorhandene Zusatzachsen (optional)
Problembeschreibung, Dauer und Häufigkeit der Störung
8.2
KUKA Customer Support
Verfügbarkeit
Der KUKA Customer Support ist in vielen Ländern verfügbar. Bei Fragen ste-
hen wir gerne zur Verfügung!
Argentinien
Ruben Costantini S.A. (Agentur)
Luis Angel Huergo 13 20
Parque Industrial
2400 San Francisco (CBA)
Argentinien
Tel. +54 3564 421033
Fax +54 3564 428877
ventas@costantini-sa.com
Australien
Headland Machinery Pty. Ltd.
Victoria (Head Office & Showroom)
95 Highbury Road
Burwood
Victoria 31 25
Australien
Tel. +61 3 9244-3500
Fax +61 3 9244-3501
vic@headland.com.au
www.headland.com.au

Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
Belgien
KUKA Automatisering + Robots N.V.
Centrum Zuid 1031
3530 Houthalen
Belgien
Tel. +32 11 516160
Fax +32 11 526794
info@kuka.be
www.kuka.be
Brasilien
KUKA Roboter do Brasil Ltda.
Avenida Franz Liszt, 80
Parque Novo Mundo
Jd. Guançã
CEP 02151 900 São Paulo
SP Brasilien
Tel. +55 11 69844900
Fax +55 11 62017883
info@kuka-roboter.com.br
Chile
Robotec S.A. (Agency)
Santiago de Chile
Chile
Tel. +56 2 331-5951
Fax +56 2 331-5952
robotec@robotec.cl
www.robotec.cl
China
KUKA Automation Equipment (Shanghai) Co., Ltd.
Songjiang Industrial Zone
No. 388 Minshen Road
201612 Shanghai
China
Tel. +86 21 6787-1808
Fax +86 21 6787-1805
info@kuka-sha.com.cn
www.kuka.cn
Deutschland
KUKA Roboter GmbH
Zugspitzstr. 140
86165 Augsburg
Deutschland
Tel. +49 821 797-4000
Fax +49 821 797-1616
info@kuka-roboter.de
www.kuka-roboter.de

Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
8 KUKA Service
Frankreich
KUKA Automatisme + Robotique SAS
Techvallée
6, Avenue du Parc
91140 Villebon S/Yvette
Frankreich
Tel. +33 1 6931660-0
Fax +33 1 6931660-1
commercial@kuka.fr
www.kuka.fr
Indien
KUKA Robotics India Pvt. Ltd.
Office Number-7, German Centre,
Level 12, Building No. - 9B
DLF Cyber City Phase III
122 002 Gurgaon
Haryana
Indien
Tel. +91 124 4635774
Fax +91 124 4635773
info@kuka.in
www.kuka.in
Italien
KUKA Roboter Italia S.p.A.
Via Pavia 9/a - int.6
10098 Rivoli (TO)
Italien
Tel. +39 011 959-5013
Fax +39 011 959-5141
kuka@kuka.it
www.kuka.it
Japan
KUKA Robotics Japan K.K.
Daiba Garden City Building 1F
2-3-5 Daiba, Minato-ku
Tokyo
135-0091
Japan
Tel. +81 3 6380-7311
Fax +81 3 6380-7312
info@kuka.co.jp
Korea
KUKA Robotics Korea Co. Ltd.
RIT Center 306, Gyeonggi Technopark
1271-11 Sa 3-dong, Sangnok-gu
Ansan City, Gyeonggi Do
426-901
Korea
Tel. +82 31 501-1451
Fax +82 31 501-1461
info@kukakorea.com

36 / 43
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
Malaysia
KUKA Robot Automation Sdn Bhd
South East Asia Regional Office
No. 24, Jalan TPP 1/10
Taman Industri Puchong
47100 Puchong
Selangor
Malaysia
Tel. +60 3 8061-0613 or -0614
Fax +60 3 8061-7386
info@kuka.com.my
Mexiko
KUKA de Mexico S. de R.L. de C.V.
Rio San Joaquin #339, Local 5
Colonia Pensil Sur
C.P. 11490 Mexico D.F.
Mexiko
Tel. +52 55 5203-8407
Fax +52 55 5203-8148
info@kuka.com.mx
Norwegen
KUKA Sveiseanlegg + Roboter
Bryggeveien 9
2821 Gjövik
Norwegen
Tel. +47 61 133422
Fax +47 61 186200
geir.ulsrud@kuka.no
Österreich
KUKA Roboter Austria GmbH
Regensburger Strasse 9/1
4020 Linz
Österreich
Tel. +43 732 784752
Fax +43 732 793880
office@kuka-roboter.at
www.kuka-roboter.at
Polen
KUKA Roboter Austria GmbH
Spółka z ograniczoną odpowiedzialnością
Oddział w Polsce
Ul. Porcelanowa 10
40-246 Katowice
Polen
Tel. +48 327 30 32 13 or -14
Fax +48 327 30 32 26
ServicePL@kuka-roboter.de

Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
8 KUKA Service
Portugal
KUKA Sistemas de Automatización S.A.
Rua do Alto da Guerra n° 50
Armazém 04
2910 011 Setúbal
Portugal
Tel. +351 265 729780
Fax +351 265 729782
kuka@mail.telepac.pt
Russland
OOO KUKA Robotics Rus
Webnaja ul. 8A
107143 Moskau
Russland
Tel. +7 495 781-31-20
Fax +7 495 781-31-19
kuka-robotics.ru
Schweden
KUKA Svetsanläggningar + Robotar AB
A. Odhners gata 15
421 30 Västra Frölunda
Schweden
Tel. +46 31 7266-200
Fax +46 31 7266-201
info@kuka.se
Schweiz
KUKA Roboter Schweiz AG
Industriestr. 9
5432 Neuenhof
Schweiz
Tel. +41 44 74490-90
Fax +41 44 74490-91
info@kuka-roboter.ch
www.kuka-roboter.ch
Spanien
KUKA Robots IBÉRICA, S.A.
Pol. Industrial
Torrent de la Pastera
Carrer del Bages s/n
08800 Vilanova i la Geltrú (Barcelona)
Spanien
Tel. +34 93 8142-353
Fax +34 93 8142-950
Comercial@kuka-e.com
www.kuka-e.com

38 / 43
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
Südafrika
Jendamark Automation LTD (Agentur)
76a York Road
North End
6000 Port Elizabeth
Südafrika
Tel. +27 41 391 4700
Fax +27 41 373 3869
www.jendamark.co.za
Taiwan
KUKA Robot Automation Taiwan Co., Ltd.
No. 249 Pujong Road
Jungli City, Taoyuan County 320
Taiwan, R. O. C.
Tel. +886 3 4331988
Fax +886 3 4331948
info@kuka.com.tw
www.kuka.com.tw
Thailand
KUKA Robot Automation (M)SdnBhd
Thailand Office
c/o Maccall System Co. Ltd.
49/9-10 Soi Kingkaew 30 Kingkaew Road
Tt. Rachatheva, A. Bangpli
Samutprakarn
10540 Thailand
Tel. +66 2 7502737
Fax +66 2 6612355
atika@ji-net.com
www.kuka-roboter.de
Tschechien
KUKA Roboter Austria GmbH
Organisation Tschechien und Slowakei
Sezemická 2757/2
193 00 Praha
Horní Počernice
Tschechische Republik
Tel. +420 22 62 12 27 2
Fax +420 22 62 12 27 0
support@kuka.cz
Ungarn
KUKA Robotics Hungaria Kft.
Fö út 140
2335 Taksony
Ungarn
Tel. +36 24 501609
Fax +36 24 477031
info@kuka-robotics.hu

Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
8 KUKA Service
USA
KUKA Robotics Corp.
22500 Key Drive
Clinton Township
48036
Michigan
USA
Tel. +1 866 8735852
Fax +1 586 5692087
info@kukarobotics.com
www.kukarobotics.com
Vereinigtes König-
reich
KUKA Automation + Robotics
Hereward Rise
Halesowen
B62 8AN
Vereinigtes Königreich
Tel. +44 121 585-0800
Fax +44 121 585-0900
sales@kuka.co.uk


41 / 43
Stand: 16.12.2010 Version: KST ExpertTech 3.1 V1 de
Index
Index
C
CIRC_REL, KRL-Assistent 23
CIRC, KRL-Assistent 21
D
Datentypen 30
Deinstallieren, ExpertTech 11
Dokumentation, Industrieroboter 5
E
Eigenschaften 7
Einleitung 5
ExpertTech, Übersicht 7
I
Installation 11
Installieren, ExpertTech 11
K
Kenntnisse, benötigte 5
Kollisionserkennung, KRL-Assistent 15
Kreisbewegung 21, 23
KUKA Customer Support 33
L
LIN_REL, KRL-Assistent 19
LIN, KRL-Assistent 18
Linearbewegung 18, 20
P
Platzhalter 28
Produktbeschreibung 7
Programmierung 15
PTP_REL, KRL-Assistent 17
PTP, KRL-Assistent 15
Punkt-zu-Punkt-Bewegung 15, 17
S
Schulungen 5
SCIRC, KRL-Assistent 27
Service, KUKA Roboter 33
Sicherheit 9
Sicherheitshinweise 5
SLIN, KRL-Assistent 26
Software 11
SPL, KRL-Assistent 25
Support-Anfrage 33
Systemvoraussetzungen 11
Z
Zielgruppe 5
Zielpunkt, Koordinaten eingeben 29
Zielpunkt, teachen 28
Zielpunkt, teachen als Variable 29


Document Outline
- KUKA.ExpertTech 3.1
- 1 Einleitung
- 2 Produktbeschreibung
- 3 Sicherheit
- 4 Installation
- 5 Bedienung
- 6 Programmierung
- 6.1 Inline-Formular Kollisionserkennung
- 6.2 Inline-Formular PTP
- 6.3 Inline-Formular PTP_REL
- 6.4 Inline-Formular LIN
- 6.5 Inline-Formular LIN_REL
- 6.6 Inline-Formular CIRC
- 6.7 Inline-Formular CIRC_REL
- 6.8 Spline-Bewegungen
- 6.9 Bewegung mit Platzhalter
- 6.10 Roboterposition übernehmen
- 6.11 Datentypen für die Bewegungsprogrammierung
- 7 Meldungen
- 8 KUKA Service
- Index
Wyszukiwarka
Podobne podstrony:
Nuestro Circulo 688 PIOTR ARSENIEVICH ROMANOVSKY 1892 1964 31 de octubre de 2015
Nuestro Circulo 750 OPINIONES SOBRE MAGNUS CARLSEN 31 de diciembre de 2016
Historia filozofii nowożytnej, 31. Francois-Pierre Maine de Biran, Francois-Pierre Maine de Biran (1
31 01 15 Material de Apoio Teoria da Contabilidade e Principios de Contabilidade e NBC Marcel Lima
Los expertos en juegos de mesa usan mejor el cerebro
biofiza cw 31
Prezentacja KST 2007 new
Brasil Política de 1930 A 2003
31 NIEDZIELA ZWYKŁA B
31 czwartek
31 Metody otrzymywania i pomiaru próżni systematyka, porów
(31) Leki pobudzająceid 1009 ppt
TEMPETE DE GLACE
31 Księga Abdiasza (2)
więcej podobnych podstron