Cel zadania:
Celem zadania jest zapoznanie się z budową i zasadą działania pneumatycznego
czujnika krańcowego oraz zaworu alternatywy „LUB”.
Opis problemu:
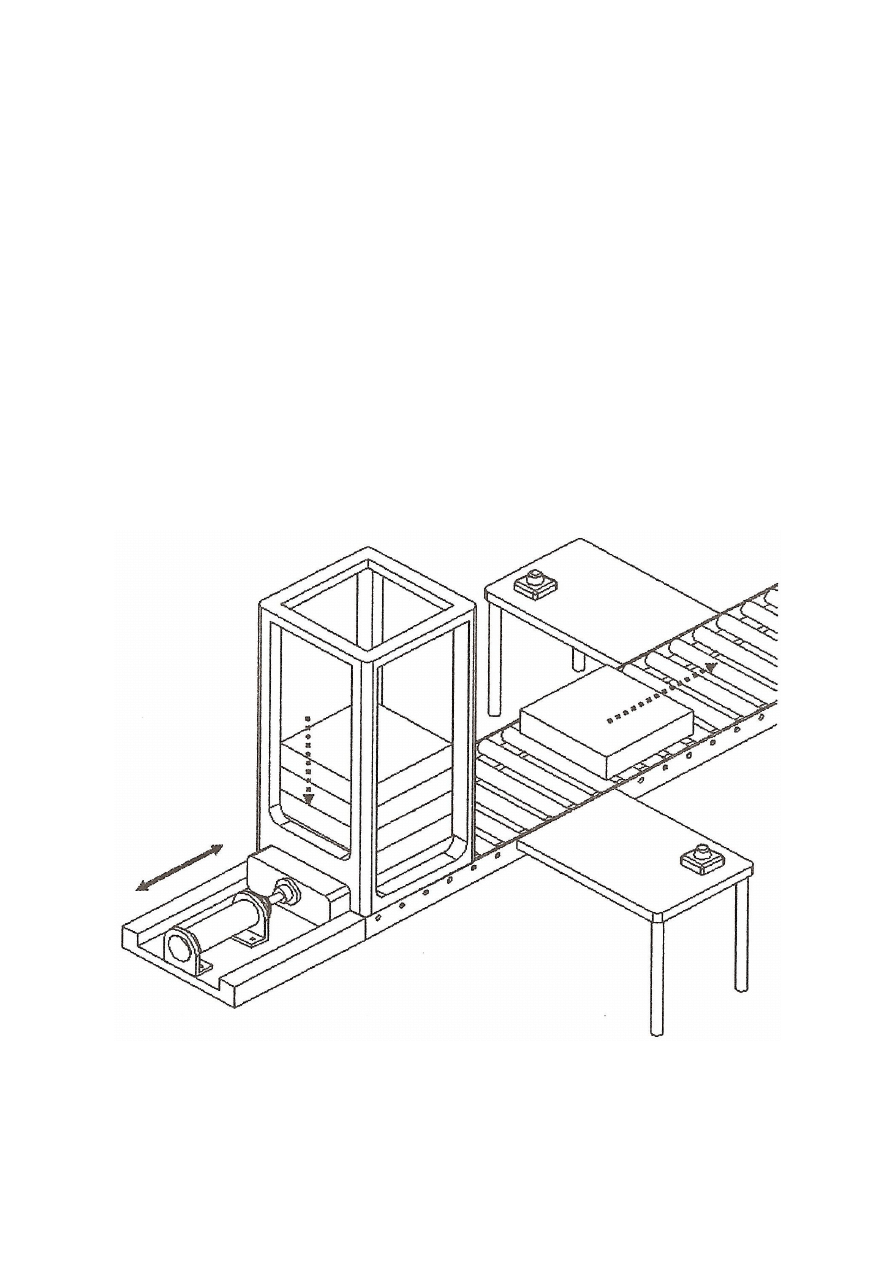
Należy zamodelować i zbudować pneumatyczny układ sterowania, służący do
wysuwania części z magazynu opadowego na taśmę montażową. Uruchomienie magazynu
(siłownika) powinno nastąpić z dwóch niezależnych stanowisk montażowych (dwa przyciski),
a tym samym spowodować wysunięcie tłoczyska siłownika do pozycji końcowej, a następnie
samoczynne jego wycofanie.
Szkic magazynu opadowego sterowanego z dwóch niezależnych stanowisk, alternatywnie uruchamiających
magazyn opadowy

Opis oczekiwanego działania:
Po naciśnięciu dowolnego z dwóch przycisków powinno nastąpić odpowiednie
przestawienie kuli wewnątrz elementu logicznego „LUB”, czego wynikiem ma być przepływ
strumienia powietrza do zaworu 4/2 sterowanego pneumatycznie (przesterowanie zaworu), a
następnie wysunięcie siłownika dwustronnego działania. Po wysunięciu tłoczyska siłownika
powinien zostać załączony pneumatyczny czujnik krańcowy, po czym tłoczysko siłownika
powinno powrócić do pozycji początkowej.

Zadania do wykonania:
Zad. 1
Przeprowadzić studium możliwości i potrzeby zastosowania odpowiednich
pneumatycznych elementów sterujących i wykonawczych.
Zad. 2
Dokonać syntezy poszukiwanego układu sterowania.
Zad. 3
W edytorze graficznym programu FluidSIM-P utworzyć wirtualny układ sterowania,
zgodnie ze schematem, zbudowanym w zad. 2, a następnie przeprowadzić symulację
działania tego układu.
Zad. 4
Stworzyć w tabeli zestawienie niezbędnych elementów użytych w ćwiczeniu (wraz z
oznaczeniami)
Lp.
Nazwa elementu
Schemat
1.
2.
3.
…
10
Zad. 5
Wymienić działania związane z doborem, montażem, podłączeniem i uruchomieniem
stworzonego układu.
Zad. 6.
Wnioski
Wyszukiwarka
Podobne podstrony:
Cw nr 03 Pneumatyczne sterowanie wysuwan
Cw nr 05 Pneumatyczne sterowanie wysuwan
Ćw nr 01 Pneumatyczne sterowanie ruchem łyżki odlewniczej w urządzeniu do zalewania form odlewniczy
Cw nr 02 Pneumatyczne sterowanie wolnym
Cw nr 06 Pneumatyczne sterowanie urzadze
Cw nr 09 Elektropneumatyczne sterowanie
Biofizyka kontrolka do cw nr 04
Cw nr 16 Elektropneumatyczne sterowanie
Cw nr 12 Elektropneumatyczne sterowanie
więcej podobnych podstron