
78
Rozdział 6
CHARAKTERYSTYKA BIOMECHANICZNA APARATU RUCHOWEGO CZŁOWIEKA
Największy wkład biomechaniki można zauważyć w obszarze zagadnień związanych z analizą
budowy i funkcji narządów ruchu człowieka. W zakresie funkcji ruchu można wyróżnić dwie grupy
problemów, a mianowicie: ocena stanu układu kostno-stawowego i układu mięśniowego oraz ocena
możliwości ruchowych, a szczególnie funkcji lokomocyjnych. Bardzo ważnym wyzwaniem jest
utworzenie norm dla parametrów biomechanicznych opisujących własności mechaniczne wyżej
wymienionych układów oraz norm parametrów opisujących mechanikę chodu w dysfunkcji kończyn
dolnych. Jest to zagadnienie bardzo skomplikowane, przede wszystkim ze względu na złożoność
samego procesu analizy.
W technice zazwyczaj urządzenia są tak skonstruowane, aby jeden silnik napędzał jeden stopień
ruchu. U człowieka jest wiele stopni swobody, co oznacza, że mamy do czynienia z uniwersalnością i
niezawodnością układu ruchu człowieka. Kończyna górna posiada 30 stopni swobody, a do wykonania
większości zadań ruchowych wystarczy 7 (z wyjątkiem ruchów precyzyjnych). Nadmiarowość stopni
swobody daje z jednej strony możliwość wykonania zadania w sposób charakterystyczny dla danego
człowieka; każdy z nas ma własny sposób i styl techniki ruchu. Z drugiej strony, unieruchomienie
jednego ogniwa w łańcuchu kinematycznym lub utrata funkcji przez jeden lub grupę mięśni, nie
oznacza utraty funkcji całej struktury.
6.1. Modele aparatu ruchowego człowieka
Do narządów ruchu zalicza się kości, stawy, więzadła i mięśnie. Stanowią one ściśle związaną ze
sobą całość czynnościową. Przewidziane trajektorie ruchów segmentów ludzkiego ciała oraz
zastosowane siły i momenty w połączeniach (stawach) ludzkiego ciała jest potężnym narzędziem w
analizie działań mięśnia. Takie informacje są z kolei użyteczne dla terapii i kinezjologów w badaniach
diagnostycznych. Analiza dynamiki wprost i dynamiki odwrotnej dostarcza informacji do osiągnięcia
różnych celów [7]. Obecnie opracowuje się modele komputerowe dynamiki wprost (proste zadanie
dynamiki) do obliczenia kinematyki segmentów ludzkiego ciała. Model dynamiczny natomiast
przewiduje przemieszenia, prędkości i przyspieszenia systemu biomechanicznego, podając
zastosowane siły i ruchy oraz warunki początkowe (np. początkowe pozycje prędkości). Każdy
element ciała działa niezależnie pod wpływem sił reakcji, ruchu mięśnia oraz siły grawitacji.
Najprostsze modele analizy 2D dynamiki odwrotnej stosowane są do obliczenia zastosowanych sił i
ruchów w połączeniach segmentów ciała ludzkiego. Obecnie coraz popularniejsze stają się 3-
wymiarowe modele dynamiczne ruchu ciała ludzkiego.
Zanim zostanie przeprowadzona analiza ruchu ciała człowieka, warto zwrócić uwagę na naukę
zajmującą się zachowaniem równowagi przez ciało – posturologię [95]. Główną rolę pełni tutaj stopa,
zapewniająca niezbędne funkcje równoważące jako reakcje na zachowanie się ciała ludzkiego. W tym
79
zadaniu biorą udział także inne, bardzo ważne narządy: oczy, ucho wewnętrzne, czucie
priorieceptywne, kończyny górne, działające jak równoważniki oraz kończyny dolne.
W biomechanice rozważa się takie formy ruchu, jak: chód, biek, skok, podskok, itp. Chód jest
jedną z podstawowych funkcji człowieka i jedną z najbardziej złożonych czynności ciała. Prawidłowy
chód wymaga wysokiej i precyzyjnej integracji układu nerwowo-mięśniowego oraz szkieletowego, co
ma miejsce jedynie wtedy, gdy może być dokładnie kontrolowany przez układ nerwowy. Badania
chodu mają bardzo bogatą historię, gdyż chód, jako dwunożna lokomocja, jest podstawowym i
naturalnym sposobem poruszania się człowieka.
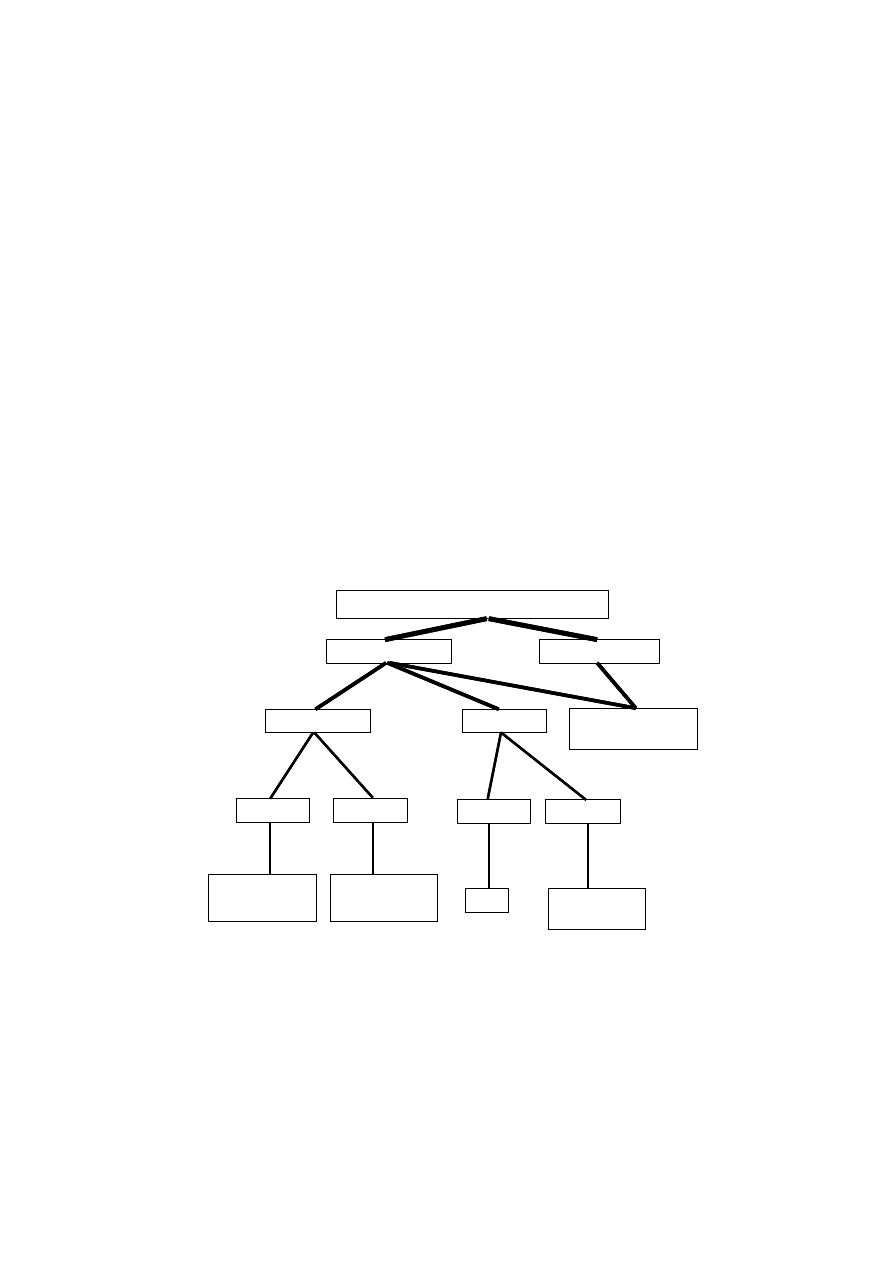
Analiza chodu polega na pomiarze, opisie i ocenie wielkości charakteryzujących lokomocję
człowieka a metody badań obejmują (rys. 6.1) [24,34]:
1. metody zajmujące się pomiarem parametrów czasowo-przestrzennych, takich jak: prędkość
chodu, długość kroków czy ich częstość;
2. metody kinematyczne mierzące trajektorie wybranych punktów ciała w przestrzeni podczas
chodu, jak również pomiar, pośredni lub bezpośredni, kątów pomiędzy segmentami ciała w
stawach, prędkości i przyspieszeń poszczególnych segmentów;
3. metody dynamiczne, pośrednie i bezpośrednie, mierzące siły i momenty sił występujące podczas
chodu.
ANALIZA RUCHU CZŁOWIEKA
A
N
A
L
I
Z
A
R
U
C
H
U
C
Z
Ł
O
W
I
E
K
A
BIOMECHANIKA
KINEZJOLOGIA
KINEMATYKA
KINETYKA
ANATOMIA
FUNKCJONALNA
LINIOWA
KĄTOWA
KĄTOWA
LINIOWA
POZYCJA
PRĘDKOŚĆ
PRZYSPIESZENIE
POZYCJA
PRĘDKOŚĆ
PRZYSPIESZENIE
SIŁA
MOMENT
OBROTOWY
ANALIZA RUCHU CZŁOWIEKA
A
N
A
L
I
Z
A
R
U
C
H
U
C
Z
Ł
O
W
I
E
K
A
BIOMECHANIKA
KINEZJOLOGIA
KINEMATYKA
KINETYKA
ANATOMIA
FUNKCJONALNA
LINIOWA
KĄTOWA
KĄTOWA
LINIOWA
POZYCJA
PRĘDKOŚĆ
PRZYSPIESZENIE
POZYCJA
PRĘDKOŚĆ
PRZYSPIESZENIE
SIŁA
MOMENT
OBROTOWY
Rys. 6.1. Analiza ruchu człowieka [7]
Pomiar parametrów kinematycznych ruchu człowieka odbywa się za pomocą następujących metod
[24]:
1. elektrogoniometry – dwa ramiona połączone potencjometrem, służące do pomiaru kąta pomiędzy
segmentami w stawach;
2. rejestracja ruchu na taśmie video, gdzie klatka po klatce identyfikuje się punkty anatomiczne na
ciele człowieka. Jest to ilościowy opis ruchu w płaszczyźnie prostopadłej do kamery;

80
3. rejestracja ruchu na taśmach video dwóch kamer, gdzie pomiar jest dokonywany w dwóch
płaszczyznach;
4. komputerowe systemy analizy ruchu, gdzie kilka kamer rejestruje ruch markerów odblaskowych
umieszczonych na ciele człowieka, następnie dane są przesyłane do komputera, gdzie zostaje
zrekonstruowana trajektoria każdego punktu w przestrzeni trójwymiarowej, a specjalne programy
obliczają zmiany kątów pomiędzy poszczególnymi segmentami w stawach, ich prędkości oraz
przyspieszenia;
5. pomiar zużycia tlenu na kilogram masy ciała w ciągu minuty lub pomiar częstości uderzeń serca,
ponieważ minimalizacja wydatku energetycznego jest jednym z priorytetów prawidłowej
lokomocji.
Do pomiaru parametrów dynamicznych ruchu służy:
1. platforma dynamograficzna – wykonuje pomiaru trzech składowych sił reakcji podłoża oraz
oblicza momenty obrotowe siły względem trzech osi;
2. platformy mierzące rozkład nacisków na stopie podczas chodu;
3. wkładki do butów z czujnikami, mierzące naciski stopy na podłoże.
Rzetelność metod analizy chodu opartych na obserwacji jest często oceniana w badaniach
eksperymentalnych. Analiza statystyczna wykazała, że nie są one wystarczająco dokładne w ocenie
zmienności parametrów kinematycznych i ich odchyleń od normy. Potrzebne są więc ilościowe i
obiektywne metody analizy ruchu [24].
Chód człowieka, z punktu widzenia biomechaniki, jest przestrzennym i cyklicznym aktem
ruchowym, polegającym na chwilowej zmianie środka ciężkości tułowia poza płaszczyznę podparcia
kończyn dolnych, a następnie odzyskiwaniu równowagi z jednoczesną realizacją ruchów posuwistych
po podłożu. Ruch postępowy ciała zainicjowany jest odbiciem stopy obciążonej od podłoża z
równoczesnym uniesieniem pięty oraz środka ciężkości całego ciała w górę. W tym czasie noga
nieobciążona wykonuje wymach do przodu, aż do zetknięcia pięty z podłożem. Wówczas następuje
opuszczenie stopy i przeniesienie ciężaru ciała. W naprzemiennym akcie ruchowym, noga wykroczna
staje się zakroczną i na odwrót.
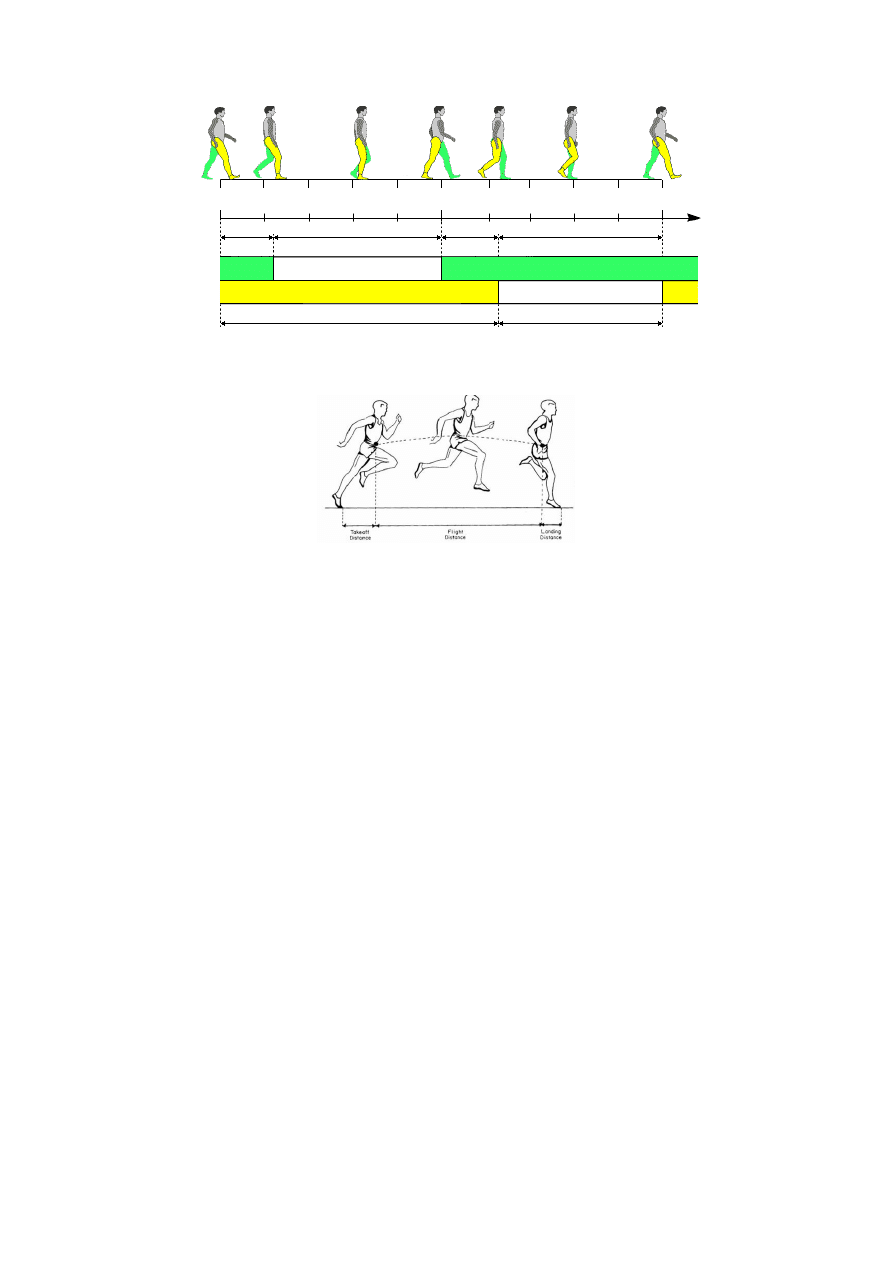
Cykl chodu składa się z dwóch faz: fazy stania, czyli czasu, w którym stopa styka się z podłożem
(58-61% czasu), gdzie podwójne podparcie zajmuje 16-22% czasu, natomiast pojedyncze podparcie
39-42%, oraz fazy kołysania, czyli czasu, w którym stopa jest oderwana od podłoża (39-42%) (rys.
6.2).
Cykl biegu składa się również z dwóch faz: stania, czyli kontaktu z nawierzchnią (47-68%) oraz
kołysania (53-32%) (rys. 6.3) [24,34].
81
HS
TO
MS
HS
TO
HS
Pojedyncze podparcie
Podwójne
podparcie
Podwójne
podparcie
Pojedyncze podparcie
Krok (Prawa stopa)
kołysanie (Prawa stopa)
Lewa stopa
Praw
a
stopa
TO
HS
HS
0
50
100
[% kroku cyklu]
HS
TO
MS
HS
TO
HS
Pojedyncze podparcie
Podwójne
podparcie
Podwójne
podparcie
Pojedyncze podparcie
Krok (Prawa stopa)
kołysanie (Prawa stopa)
Lewa stopa
Praw
a
stopa
TO
HS
HS
0
50
100
HS
TO
MS
HS
TO
HS
Pojedyncze podparcie
Podwójne
podparcie
Podwójne
podparcie
Pojedyncze podparcie
Krok (Prawa stopa)
kołysanie (Prawa stopa)
Lewa stopa
Praw
a
stopa
TO
HS
HS
0
50
100
[% kroku cyklu]
Rys. 6.2. Schemat cyklu chodu czowieka [24]
Rys. 6.3. Cykl biegu [96]
Cykl chodu jest podstawową jednostką w badaniach analizy chodu. Trwa on od chwili kontaktu
pięty z podłożem jednej (najczęśniej prawej) kończyny dolnej do chwili kolejnego kontaktu pięty tej
samej kończyny z podłożem. Obejmuje ona dwa kroki. Jest kilka czynników, które charakteryzują
prawidłowy chód człowieka, przy założeniu, że następuje najmniejsze zużycie energii, czyli ruch
środka ciężkości ciała odbywa się po linii jak najbardziej zbliżonej do prostej:
- rotacja miednicy – naprzemiennie w prawo i w lewo, w stosunku do kierunku ruchu;
- przechyły miednicy w płaszczyźnie czołowej;
- zgięcie kolana podczas fazy podparcia o ok. 15
0
;
- połączenie ruchu w stawie skokowym z ruchem w stawie kolanowym, gdzie środki ciężkości obu
stawów są na tym samym poziomie;
- ruchy miednicy w płaszczyźnie poprzecznej połączone z odwiedzeniem w stawie biodrowym.
W analizie chodu należy uwzględnić również wiek człowieka. Zdrowe dziecko zaczyna chodzić ok.
pierwszego roku życia, z częstotliwością 180 kroków na minutę. Kontakt z podłożem następuje całą
stopą lub przodostopiem. Podczas prawie całego cyklu chodu podudzie ma ustawione prostopadle do
podłoża, a kończyna dolna podtrzymuje biernie ciało w fazie podparcia. Dziecko roczne zwiększa
prędkość chodu poprzez zwiększenie częstości kroków, podczas gdy ich długość pozostaje taka sama.
W drugim roku życia, kontakt stopy z podłożem rozpoczyna się piętą i rośnie długość kroków. W
wieku 4 lat zanika rotacja biodra i tułowia. Pojawia się zginanie i prostowanie kolana. Znacznie

82
później, w wieku lat 60, następuje systematyczny spadek prędkości chodu wskutek zmniejszenia
wydolności wydechowej i zmian degeneracyjnych w stawach. Chód staje się wolniejszy, kroki krótsze
i maleje ich częstotliwość. U osób starszych następuje zwiększenie udziału procentowego fazy
podwójnego podparcia. Znaczenie ma również płeć osoby. U kobiet występuje nieznacznie niższa
rotacja podudzia i zmniejszony zakres ruchu w stawie kolanowym (ok. 2%). Większy jest również kąt
zgięcia kolana podczas kontaktu stopy z podłożem i zwiększone zgięcie w stawie biodrowym. Kobiety
chodzą nieznacznie wolniej, stawiają mniejsze kroki, ale ich częstotliwość jest większa. Wpływ na
cykl chodu ma również otyłość. Im człowiek ma większą nadwagę, tym chód staje się wolniejszy i
czasami występuje stawianie stóp z palcami na zewnątrz.
6.2. Biomechaniczna analiza ruchu
Do biomechanicznej analizy i syntezy ruchu wykorzystuje się wiedzę z następujących dziedzin:
mechaniki teoretycznej, mechaniki płynów, elektrotechniki teoretycznej i elektroniki, teorii
sterowania, cybernetyki technicznej, informatyki i bioniki, mechatroniki, metod modelowania
matematycznego, metod elementów skończonych oraz symulacje komputerowe. Analiza i ocena
jakości chodu człowieka to bardzo ważne zagadnienia w biomechanice. Umożliwiają one wyznaczenie
podstawowych wielkości dynamicznych oraz określenie rodzaju i stopnia patologii, efektywności
interwencji chirurgicznej i rehabilitacji. Wykorzystywane są również do wspomagania procesu
podejmowania decyzji co do sposobu interwencji medycznej, metod treningu dla sportowców czy też
ergonomii i bezpieczeństwa pracy. Stosuje się metody jakościowe, czyli obserwację, oraz metody
ilościowe, czyli pomiary kinematyczne, dynamiczne, jak też ocenę i diagnozę działania mięśni
metodami elektromiografii mięśni. Celem biomechanicznej analizy ruchu jest m.in.:
1. diagnoza patologii w dolnych kończynach,
2. podejmowanie decyzji przez wykonaniem operacji,
3. opracowanie protez stawów,
4. porównanie parametrów ruchu przez i po operacji,
5. badania urazów u sportowców,
6. badania protez i implantów narządów ruchu.
6.2.1. Siły działające na aparat ruchu człowieka
Podczas wykonywania ruchu, na ciało człowieka działają trzy rodzaje sił: siła reakcji podłoża, siła
tarcia (siła ścinania) oraz siła oporu powietrza.
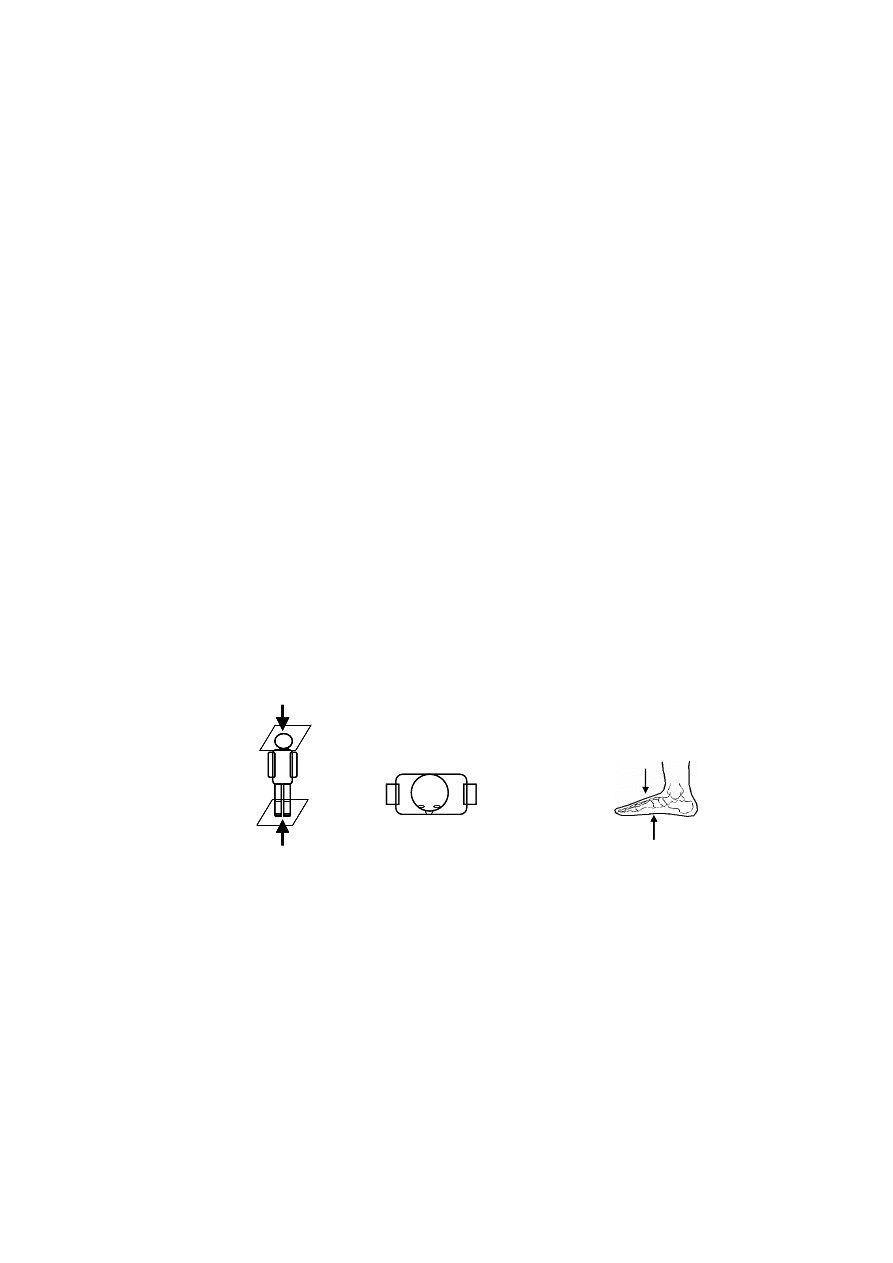
Siła reakcji podłoża
Siła ta reprezentuje reakcję podłoża na wszystkie segmenty ciała i odnosi się do III prawa dynamiki
Newtona (działanie – reakcja) [26]. Jej wartość można zmierzyć używając specjalnej płyty, która
83
umożliwia podanie informacji w trzech płaszczyznach ruchu (rys. 6.4). Płyta umożliwia obserwację
wzajemnego oddziaływania między komponentem dynamicznym (wartością siły), a kinematycznym
(pozycja, prędkość, przyspieszenie). Siła działa na stopę i aby można ją przedstawić jako wektor,
należy założyć, że siły reakcji podłoża są skupione w jednym punkcie, tzw. centrum nacisku.
X (kierunek przednio-tylny)
Z (kierunek poprzeczny)
Y (kierunek pionowy)
X (kierunek przednio-tylny)
Z (kierunek poprzeczny)
Y (kierunek pionowy)
Rys. 6.4. Rozkład siły reakcji podłoża na ciało człowieka podczas ruchu [97]
Do pomiaru stycznych, jak i prostopadłych sił kontaktu między stopą i podłożem służy platforma
dynamometryczna, skonstruowana przez Marey’a w 1872 r. [13,34]. Można też stosować obuwie
wyposażone w czujniki, dzięki czemu istnieje możliwość pomiaru rozkładu nacisków na stopę.
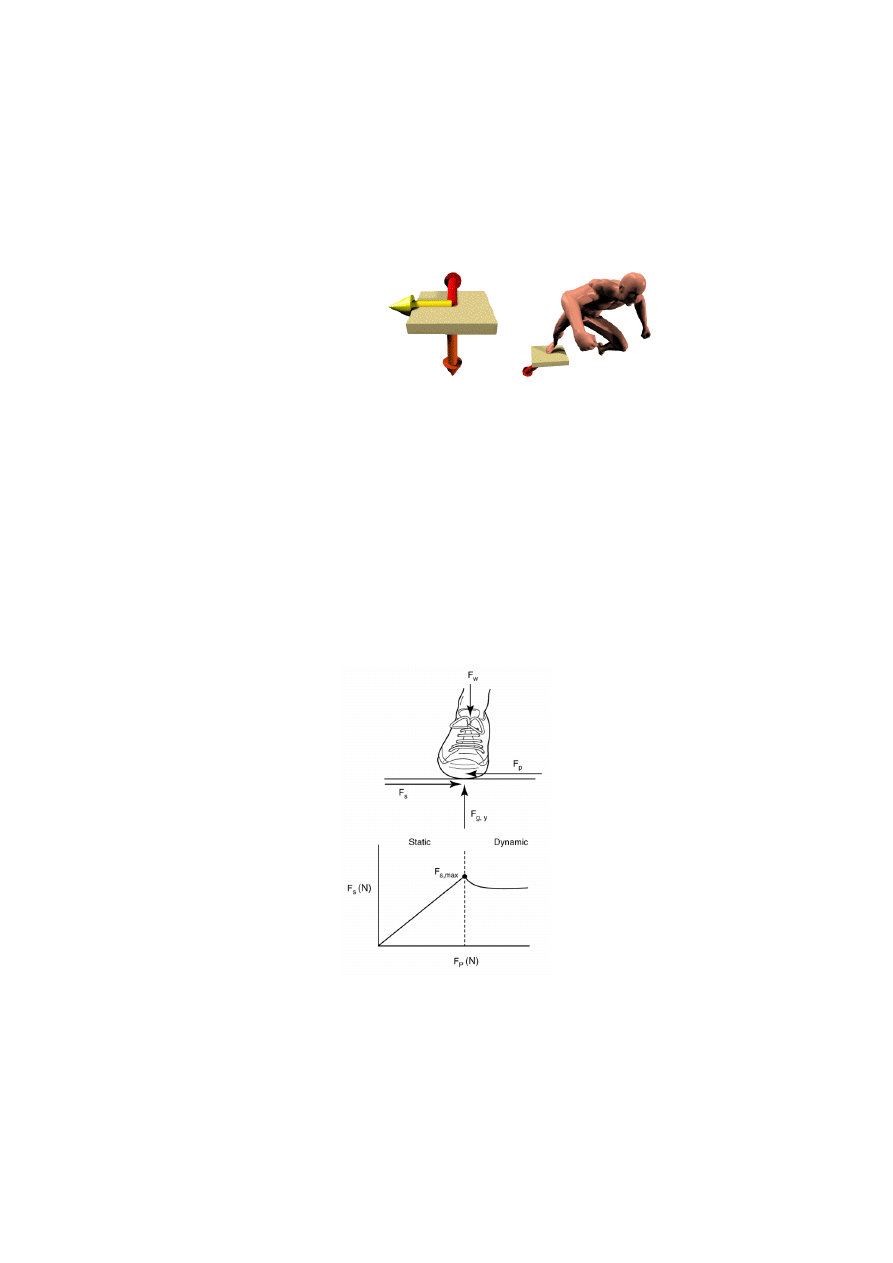
Siła tarcia (siła ścinania)
Siła tarcia pochodzi np. od tarcia obuwia o podłoże (rys. 6.5). Siła jest wynikiem złożenia dwóch
poziomych składowych siły reakcji podłoża. Tarcie może być statyczne i dynamiczne. Statyczne tarcie
ma większą wartość niż dynamiczne [8].
Rys. 6.5. Siła tarcia działająca na stopę w czasie ruchu [97]
Siła F
p
jest siłą nacisku, która w miarę wzrostu będzie równoważona przez równoważącą (podobna
wartość ale kierunek przeciwny) siłę ścinania F
s
, jednak tylko do pewnego momentu. Kiedy F
s
osiągnie wartość maksymalną, system staje się dynamiczny i stopa zaczyna ślizgać się. W tym samym
czasie wartość siły F
s
zaczyna maleć.
84
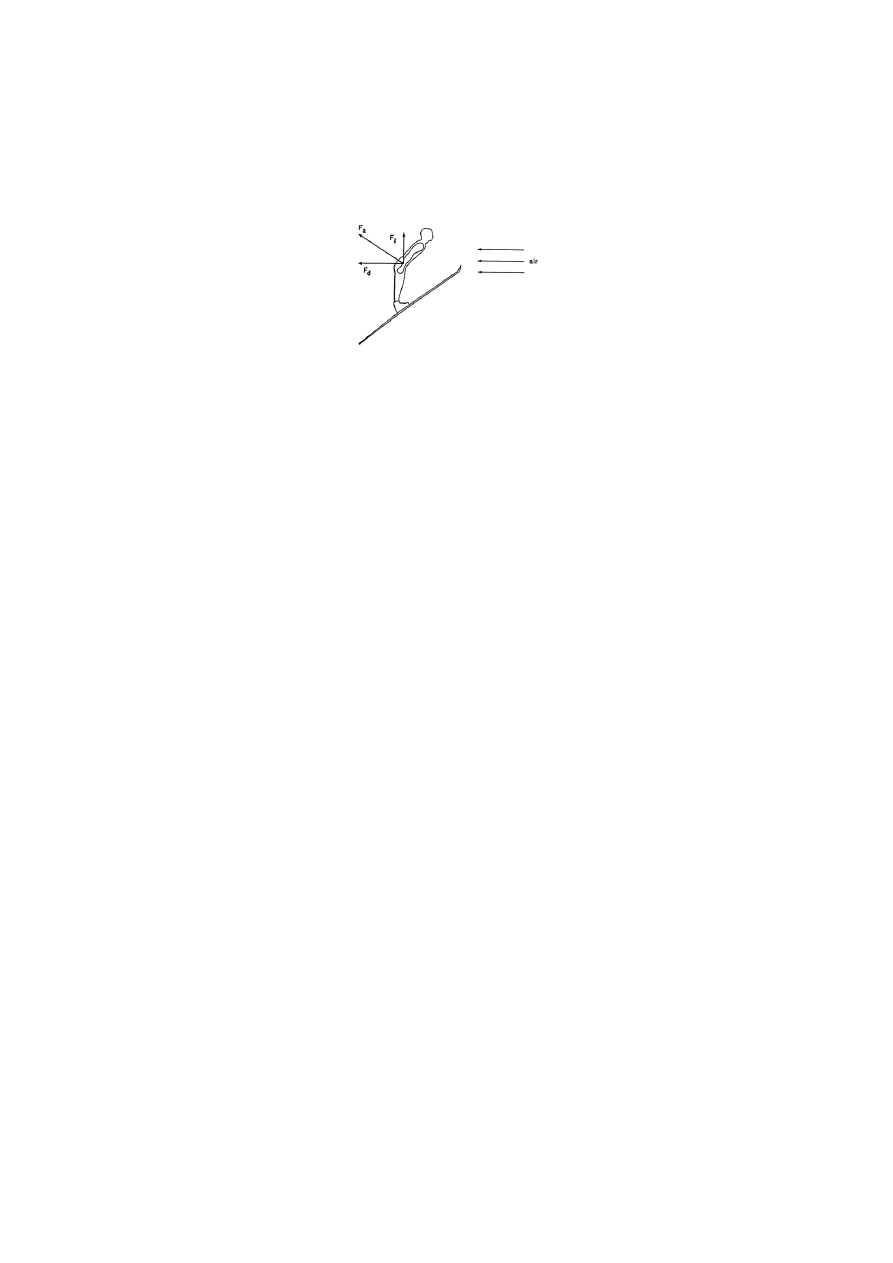
Siła oporu powietrza
Opór powietrza, to forma oporu (każdego płynu, a więc również cieczy), która wywołuje dwa rodzaje
efektów: siłę wleczenia F
d
, działającą w kierunku przeciwnym do ruchu, oraz siłę podnoszenia F
l
(rys. 6.6).
Rys. 6.6. Siła oporu działająca na aparat ruchowy człowieka [97]
6.2.2. Ilościowa i jakościowa analiza ruchu człowieka
Analiza ruchu człowieka może odbywać się dwoma sposobami, za pomocą optymalizacji
statycznej lub dynamicznej.
Optymalizacja statyczna polega na obliczeniu siły mięśni, na podstawie
pomiarów ruchu ciała oraz sił zewnętrznych. Zaletą tej metody jest to, iż nie jest zbyt skomplikowana
obliczeniowo. Wadą natomiast jest zależność od dokładności dokonanych pomiarów (pozycja,
prędkość segmentów ciała). Ponadto, trudno ująć w obliczeniach fizjologię mięśni, ponieważ długość
mięśni jest również zależna od dokładności pomiarów. Metoda ta nie uwzględnia również modelu
jednostki napędzającej.
Optymalizacja dynamiczna polega na obliczeniu ruchu ciała na podstawie
pobudzenia mięśni. Zaletą tej metody jest używanie układu równań do opisu zależności ruchu od siły i
nie istnieje potrzeba wykorzystywania urządzeń do pomiaru ruchu. Ponadto, łatwo uwzględnić
fizjologię mięśnia w numerycznym sformułowaniu problemu oraz także - model jednostki
napędzającej w równaniach modelu matematycznego. Niestety, jest to metoda skomplikowana
obliczeniowo.
Anatomia człowieka jest jedną z najstarszych dziedzin nauki. Przez wieki wykształciła specyficzny
język, pozwalający na precyzyjne określenie położenia i ruchów ciała człowieka. Nazwy i pojęcia
używane przez lekarzy-anatomów zostały przyjęte również przez specjalistów z innych dziedzin
wykorzystujących wiedzę o budowie anatomicznej organizmu ludzkiego, w tym przez
biomechaników. W celu opisania ruchów w stawach oraz pozycji wyjściowych dla pomiarów stosuje
się podstawowe określenia stanowiące standard pojęciowo-nazewniczy [7]. Podstawowym pojęciem
związanym z opisem ciała człowieka jest pozycja anatomiczna, czyli pewien stan odniesienia, od
którego mierzone są położenia i ruchy organizmu ludzkiego lub jego fragmentów. Pozycję
anatomiczną charakteryzują:
- postawa stojąca,
- głowa i wzrok zwrócone do przodu,
- kończyny górne wyprostowane, ułożone wzdłuż tułowia,
- palce rąk wyprostowane, kciuk odwiedziony,
85
- kończyny dolne wyprostowane,
- stopy zbliżone do siebie powierzchniami przyśrodkowymi,
- palce stóp wyprostowane.
Nie jest to pozycja swobodna i człowiek rzadko przyjmuje się ją w trakcie codziennej aktywności.
Niezależnie jednak od rzeczywistego ułożenia ciała, poszczególne struktury opisuje się i nazywa tak,
jakby dana osoba znajdowała się w pozycji anatomicznej.
Anatomiczne kierunki ruchu
Rozróżnia się 12 podstawowych kierunków ruchu (rys. 6.7) [15]:
1. dalszy (distal) – dalej od tułowia,
2. bliższy (proximal) – bliżej tułowia, do tułowia,
3. poprzeczny (lateral) – w bok od linii środkowej,
4. przyśrodkowy (medial) – bliżej linii środkowej,
5. przedni (interior) – przednia strona pozycji anatomicznej,
6. tylny (posteriori) – tylna strona pozycji anatomicznej,
7. najwyższy (superior) – bliżej głowy (czaszkowy),
8. najniższy (inferior) – dalej od głowy (ogonowy),
9. powierzchniowy (superficial) – bliżej powierzchni,
10. głęboki (deep) – dalej od powierzchni,
11. podeszwowy (planar) – spód stopy,
12. grzbietowy (dorsal) – góra stopy.
Kierunek z dołu
Kierunek z góry
Kierunek z dołu
Kierunek z góry
Lewy
poprzeczny
Prawy
poprzeczny
Przedni
Tylny
Lewy
poprzeczny
Prawy
poprzeczny
Przedni
Tylny
Grzbietowy
Podeszwowy
Grzbietowy
Podeszwowy
Rys. 6.7. Anatomiczne kierunki ruchu [7]
Osie ciała
Rozróżnia się trzy osie ciała (rys. 6.8): oś długa, czyli pionowa (longitudinal), oś poprzeczna, czyli
pozioma (horizontal, transversal) oraz oś strzałkowa (antero-posterior).
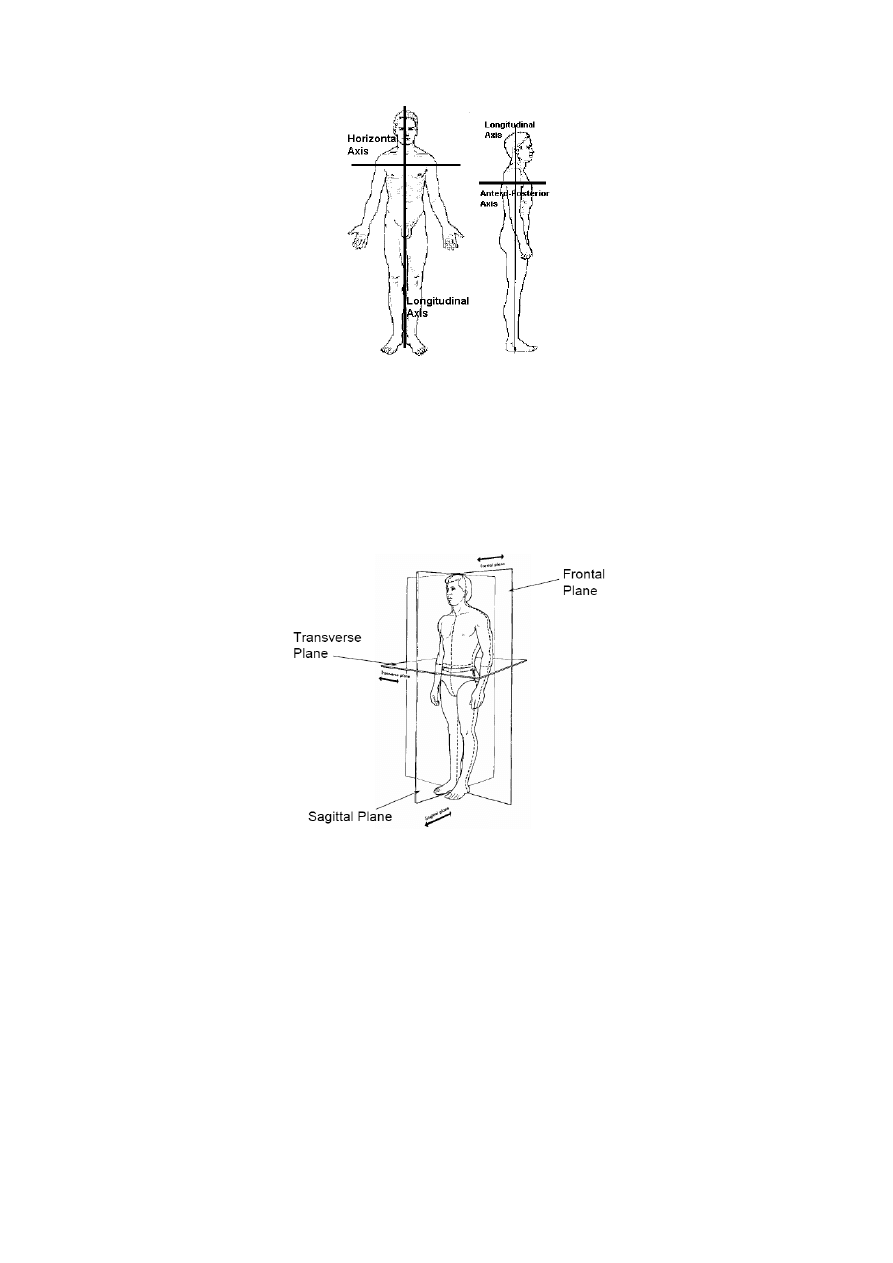
86
Rys. 6.8. Osie ciała [98]
Płaszczyzny ruchu
Do badania poszczególnych części ciała i do analizy ich ruchów pomocne jest wprowadzenie pojęcia
płaszczyzn ciała (rys. 6.9). Ruch ciała w pewnej płaszczyźnie to ruch postępowy w tej płaszczyźnie
lub obrót wokół osi prostopadłej do niej. Rzeczywiste ruchy są zazwyczaj złożeniem ruchów w
różnych płaszczyznach.
Rys. 6.9. Płaszczyzny ciała [98]
Wyróżnia się trzy główne płaszczyzny, względem których mogą być rozpatrywane poszczególne
części ciała:
1. strzałkowa (sagittal) – płaszczyzna prostopadła, która dzieli ciało na część prawą i lewą.
Płaszczyzna obraca się wokół osi przyśrodkowo-poprzecznej (ML);
2. przednia (frontal) – płaszczyzna prostopadła, która dzieli ciało na część przednią i tylną. Obraca
się wokół osi przednio-tylnej (AP);
3. poprzeczna (transverse) – płaszczyzna pozioma, która dzieli ciało na część czaszkową i ogonową.
Obraca się wokół osi wzdłużnych.
87
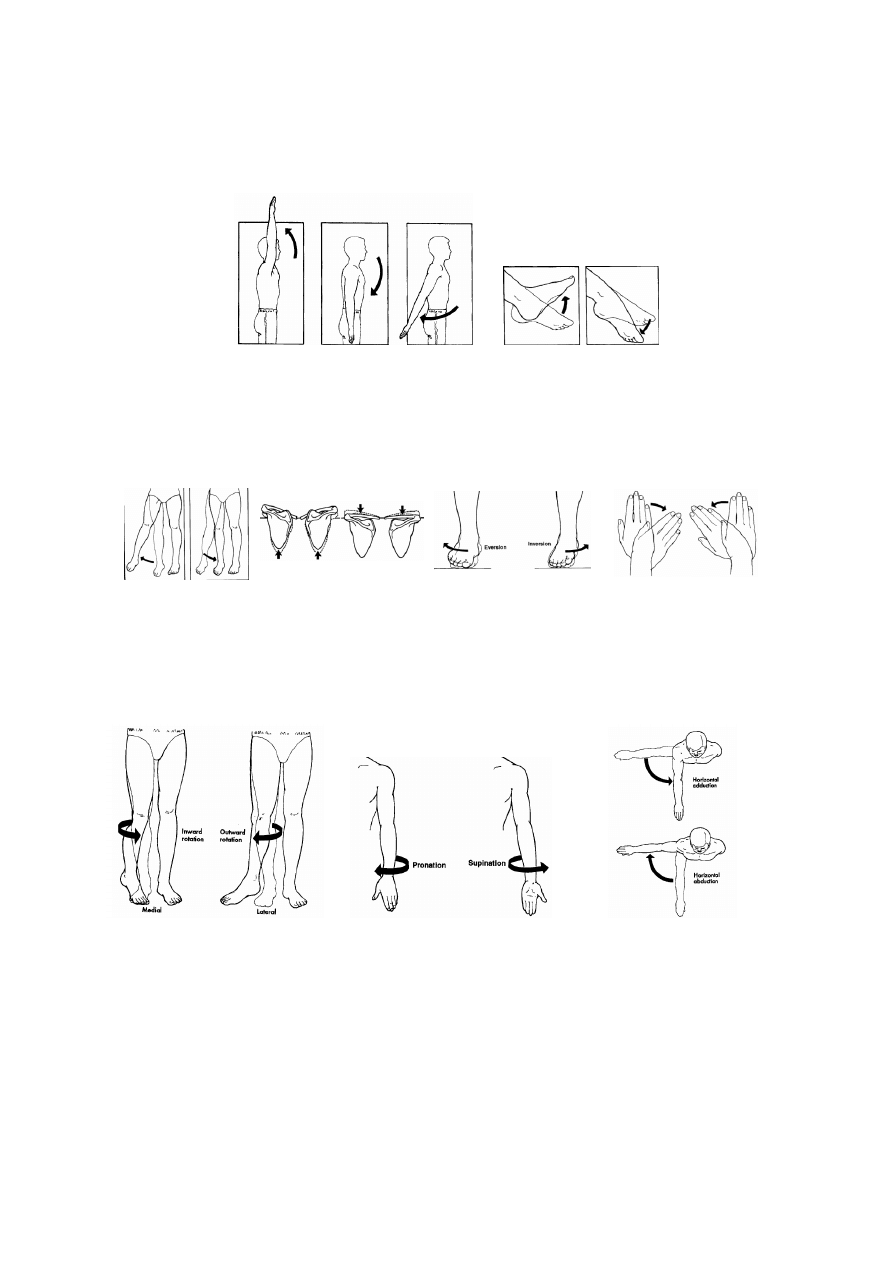
W każdej z płaszczyzn odbywają się następujące ruchy, które zostały przestawione na rys.
6.10
6.12 [98]:
a) b)
c)
d)
e)
Rys. 6.10. Ruchy w płaszczyźnie strzałkowej: a) zginanie b) prostowanie c) przeprost d) zgięcie
grzbietowe e) zgięcie podeszwowe [98]
a)
b) c) d) e) f) g) h)
Rys. 6.11. Ruchy w płaszczyźnie przedniej: a) odwodzenie (od linii środkowej), b) przywiedzenie (do
linii środkowej), c) uniesienie (podnoszenie), d) obniżenie (opadanie), e) odwrócenie, f) odwrócenie
do środka, g) promieniowe odchylenie, h) łokciowe odchylenie [98]
a)
b)
c)
d)
e)
f)
Rys. 6.12. Ruchy w płaszczyźnie poprzecznej: a) obrót przyśrodkowy, b) obrót poprzeczny (rotacja na
zewnątrz), c) nawrócenie (probacja), d) odwrócenie (supinacja), e) poziome przywiedzenie, f)
poziome odwiedzenie [98]
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron