
Sławomir Kulesza
Cyfrowe przetwarzanie sygnałów (6)
Wykład dla studentów I roku (N)SMU WMiI
Specjalność: Techniki multimedialne
1 (44)

Ogólna postać równania różnicowego
Ogólna postać liniowego równania różnicowego ze stałymi współczynnikami jest
następująca:
y [n]=−
∑
k=1
N
a
k
⋅
y [n−k ]
∑
k=0
M
b
k
⋅
x [n−k ]
Lub równoważnie:
∑
k=0
N
a
k
⋅
y [n−k ]=
∑
k =0
M
b
k
⋅
x [ n−k ] ;a
0
≡
1
gdzie: liczba N jest rzędem równania różnicowego lub też rzędem układu.
Odpowiedź układu rekursywnego w chwili n jest więc kombinacją liniową
wcześniejszych próbek odpowiedzi {y[n-1], y[n-2], ..., y[n-N]}, jak też bieżącej
i wcześniejszych próbek pobudzenia {x[n], x[n-1], ..., x[n-M]}.
2 (44)

Rozwiązanie równania różnicowego o stałych współczynnikach
Znając zależność wej-wyj układu LTI wyrażoną w postaci równania różnicowego
o stałych współczynnikach, naszym celem będzie rozwiązanie tego równania,
czyli wyrażenie odpowiedzi y[n] jako jawnej funkcji pobudzenia oraz warunków
początkowych (wyeliminowanie rekurencji):
y [n]= f
x [ n] , y [−1]
Zasadniczo istnieją dwie metody rozwiązania tego problemu:
–
metoda bezpośrednia – poszukiwanie rozwiązania w postaci sumy:
y [n]= y
a
[
n] y
b
[
n]
–
metoda pośrednia (z-transformaty).
3 (44)

Całkowite rozwiązanie równania różnicowego
Procedura rozwiązywania równań różnicowych jest zbliżona do tej, jaką stosuje
się do rozwiązywania równań różniczkowych o stałych współczynnikach.
Odpowiedź układu poszukuje się zatem w postaci sumy dwóch niezależnych
składników, które łącznie dają rozwiązanie całkowite:
y [n]= y
h
[
n] y
p
[
n]
Składowa y
h
[n] to rozwiązanie jednorodne (dla x[n] = 0), zaś składowa y
p
[n] jest
rozwiązaniem szczególnym (dla określonego, niezerowego pobudzenia).
4 (44)

Rozwiązanie jednorodne równania różnicowego
Rozwiązanie jednorodne równania różnicowego jest rozwiązaniem otrzymanym
przy braku pobudzenia:
∀
n∈Z
x [n]=0
Jednorodne równanie różnicowe ma więc postać:
∑
k=0
N
a
k
⋅
y [n−k ]=0
Postulujemy wykładniczą postać rozwiązania jednorodnego:
y
h
[
n]=
n
Skąd otrzymujemy, że:
∑
k=0
N
a
k
⋅
n−k
=
n−N
N
a
1
⋅
N −1
...a
N −1
⋅
a
N
=
0
5 (44)

Wielomian:
N
a
1
⋅
N −1
...a
N −1
⋅
a
N
nazywany jest wielomianem charakterystycznym układu. Posiada on
w ogólności N-pierwiastków zespolonych {λ
1
, λ
2
,... , λ
N
}.
Załóżmy chwilowo, że pierwiastki są rozdzielone (nie powtarzają się) – ogólna
postać rozwiązania jednorodnego równania różnicowego jest następująca:
y
h
[
n]=c
1
⋅
1
n
c
2
⋅
2
n
...c
N
⋅
N
n
gdzie współczynniki rozwinięcia c
1
...c
N
wyznacza się na podstawie warunków
początkowych. Ponieważ jednocześnie założyliśmy, że pobudzenie jest równe
zero, powyższe równanie jest równe odpowiedzi swobodnej układu y
zi
[n].
W przypadku pierwiastków wielokrotnych (np. m-krotnego λ
1
) mamy:
y
h
[
n]=
c
1
⋅
1
n
c
2
⋅
n⋅
1
n
...c
m
⋅
n
m−1
1
n
c
m1
⋅
m1
n
...c
N
⋅
N −m
n
6 (44)

Ex.: Wyznaczyć rozwiązanie jednorodne układu danego równaniem różnicowym:
y [n]a
1
⋅
y [n−1]=x [n]
Postulujemy rozwiązanie jednorodne (dla x[n] = 0) w postaci wykładniczej:
y
h
[
n]=
n
Podstawiając do wzoru wyjściowego otrzymamy:
n
a
1
⋅
n−1
=
n−1
a
1
=
0
Skąd otrzymujemy, że pierwiastkiem wielomianu charakterystycznego jest:
1
=−
a
1
Rozwiązanie jednorodne ma więc postać:
y
h
[
n]=c
1
⋅
1
n
=
c
1
−
a
1
n
7 (44)

Rozwiązanie szczególne równania różnicowego
Rozwiązanie szczególne równania różnicowego y
p
[n] jest rozwiązaniem
otrzymanym dla konkretnego pobudzenia x[n]:
∑
k=0
N
a
k
⋅
y
p
[
n−k ]=
∑
k =0
M
b
k
⋅
x [n−k ] ;a
0
≡
1
Procedura obliczania rozwiązania szczególnego wychodzi z założenia, że
przyjmuje ono taką samą postać jak pobudzenie, tzn. jeśli x[n] jest ciągiem stałym,
y
p
[n] również jest stały; jeśli x[n] jest sinusoidalny, y
p
[n] jest sinusoidalny itd.
Założenie to jest wynikiem liniowości omawianych układów.
8 (44)
Ex.: Wyznaczyć rozwiązanie szczególne równania różnicowego:
y [n]a
1
⋅
y [n−1]= x [n];∣a
1
∣
1
dla pobudzenia w postaci skoku jednostkowego:
x [n]=u[n]
Postulujemy rozwiązanie szczególne w postaci:
y
p
[
n]= A⋅u[n]
Po podstawieniu do równania wyjściowego otrzymujemy:
A⋅u [n]a
1
⋅
A⋅u[n−1]=u[n]
Skąd dla wszystkich n≥1 otrzymujemy:
A
1a
1
=
1
Rozwiązanie szczególne ma zatem postać:
y
p
[
n]=
1
1a
1
u[n]
9 (44)

Odpowiedź swobodna i wymuszona
Znając rozwiązanie jednorodne i ogólne równania różnicowego można wyznaczyć
odpowiedź swobodną i wymuszoną układu. Odpowiedź swobodna y
zi
[n] jest
obliczana przy braku pobudzenia, zaś odpowiedź wymuszona y
zs
[n] jest obliczona
dla określonego pobudzenia, przy wyzerowanych wszystkich warunkach
początkowych.
Całkowite rozwiązanie równania różnicowego ma wówczas postać:
y [n]= y
zi
[
n] y
zs
[
n]
10 (44)

Ex.: Wyznaczyć odpowiedź swobodną i wymuszoną układu:
y [n] y [n−1]−6y [n−2]=x [n]
dla pobudzenia skokowego i zadanych warunków początkowych:
x [n]=8 u[n] ; y [−1]=1 ; y [−2]=−1
Znajdźmy najpierw rozwiązanie jednorodne w postaci y
h
[n] = λ
n
:
n
n−1
−
6
n−2
=
n−2
2
−
6
=
n−2
3
−
2
=
0
Stąd rozwiązanie jednorodne wynosi:
y
h
[
n]=c
1
−
3
n
c
2
2
n
11 (44)

Obliczmy teraz rozwiązanie szczególne dla zadanego pobudzenia:
y
p
[
n]= A
Wówczas po podstawieniu do równania wyjściowego otrzymamy:
A A−6A=8 u[n]
Skąd, dla n≥0 mamy, że:
y
p
[
n]= A=−2
Rozwiązanie całkowite ma więc postać:
y [n]=c
1
−
3
n
c
2
2
n
−
2
12 (44)

Odpowiedź swobodną wyznaczymy z rozwiązania jednorodnego dobierając stałe
c
1
oraz c
2
na podstawie warunków początkowych:
y [0]=6y [−2]− y [−1]=−7
y [1]=6y [−1]− y [0]=13
y [0]=c
1
c
2
y [1]=−3 c
1
2 c
2
Po rozwiązaniu układu równań otrzymujemy, że:
c
1
=−
5.4 ; c
2
=−
1.6
Odpowiedź swobodna układu ma więc postać:
y
zi
[
n]=−5.4⋅−3
n
−
1.6⋅2
n
; n≥0
13 (44)

Odpowiedź wymuszoną obliczymy z rozwiązania całkowitego, dobierając stałe c
1
oraz c
2
tak, aby uzyskać wyzerowanie warunków początkowych. Podstawiając
zerowe warunki początkowe do równania wyjściowego otrzymamy, że:
y [0]=x [0]=8
y [1]= x [1]− y [0]=0
Zatem:
y [0]=c
1
c
2
−
2=8
y [1]=−3 c
1
2 c
2
−
2=0
Skąd otrzymujemy, że:
c
1
=
3.6 ; c
2
=
6.4
Stąd odpowiedź wymuszona przy zerowych warunkach początkowych wynosi:
y
zs
[
n]=3.6⋅−3
n
6.4⋅2
n
−
2 ; n≥0
14 (44)

Odpowiedź impulsowa rekursywnych układów LTI
Odpowiedź impulsowa h[n] układów LTI została zdefiniowana jako odpowiedź na
pobudzenie impulsowe. W przypadku rekursywnych układów LTI odpowiedź
wymuszona dana jest jako splot:
y
zs
[
n]=
∑
k =0
n
h[k ]⋅x [n−k ] ; n≥0
Co dla pobudzenia impulsowego redukuje się do:
y
zs
[
n]=
∑
k =0
n
h[k ]⋅[n−k ]=h[n]
Odpowiedź impulsowa h[n] jest więc tożsama odpowiedzi wymuszonej na
pobudzenie impulsem jednostkowym x[n] = δ[n].
15 (44)

Wyznaczanie odpowiedzi impulsowej
Z wcześniejszych rozważań wynika, iż całkowita odpowiedź rekursywnego układu
LTI opisywanego równaniem różnicowym składa się z dwóch części: rozwiązania
równania jednorodnego (przy zerowym pobudzeniu) oraz rozwiązania
szczególnego dla określonego pobudzenia.
W przypadku pobudzenia impulsowego x[n] = 0 dla wszystkich n > 0, a zatem
rozwiązanie szczegółowe również jest równe zero: y
p
[n] = 0. W takim przypadku
odpowiedź impulsowa może zostać wyznaczona na podstawie rozwiązania
jednorodnego, po dopasowaniu współczynników c
k
tak, aby spełniały one
wymaganie zerowych warunków początkowych.
16 (44)

Ex.: Wyznaczyć odpowiedź impulsową h[n] układu:
y [n] y [n−1]−6y [n−2]=x [n]
Rozwiązanie jednorodne ma postać:
y
h
[
n]=c
1
−
3
n
c
2
2
n
; n≥0
Konieczność zerowania się warunków początkowych prowadzi do wniosku, że:
y [0]=c
1
c
2
=
1
y [1]=−3 c
1
2 c
2
=−
1
Skąd otrzymujemy, że:
c
1
=
0.6
c
2
=
0.4
Odpowiedź impulsowa ma więc postać:
h[n]=
0.6
−
3
n
0.4
2
n
u[ n]
17 (44)
Długość odpowiedzi filtrów rekursywnych
Z dotychczasowej analizy wypływa wniosek, iż odpowiedzi impulsowe układów
rekursywnych są z natury nieskończone, a więc są to układy IIR. Istotnie,
rekursywny charakter równań różnicowych o stałych współczynnikach powoduje,
że opisywane przez nie układy są układami IIR.
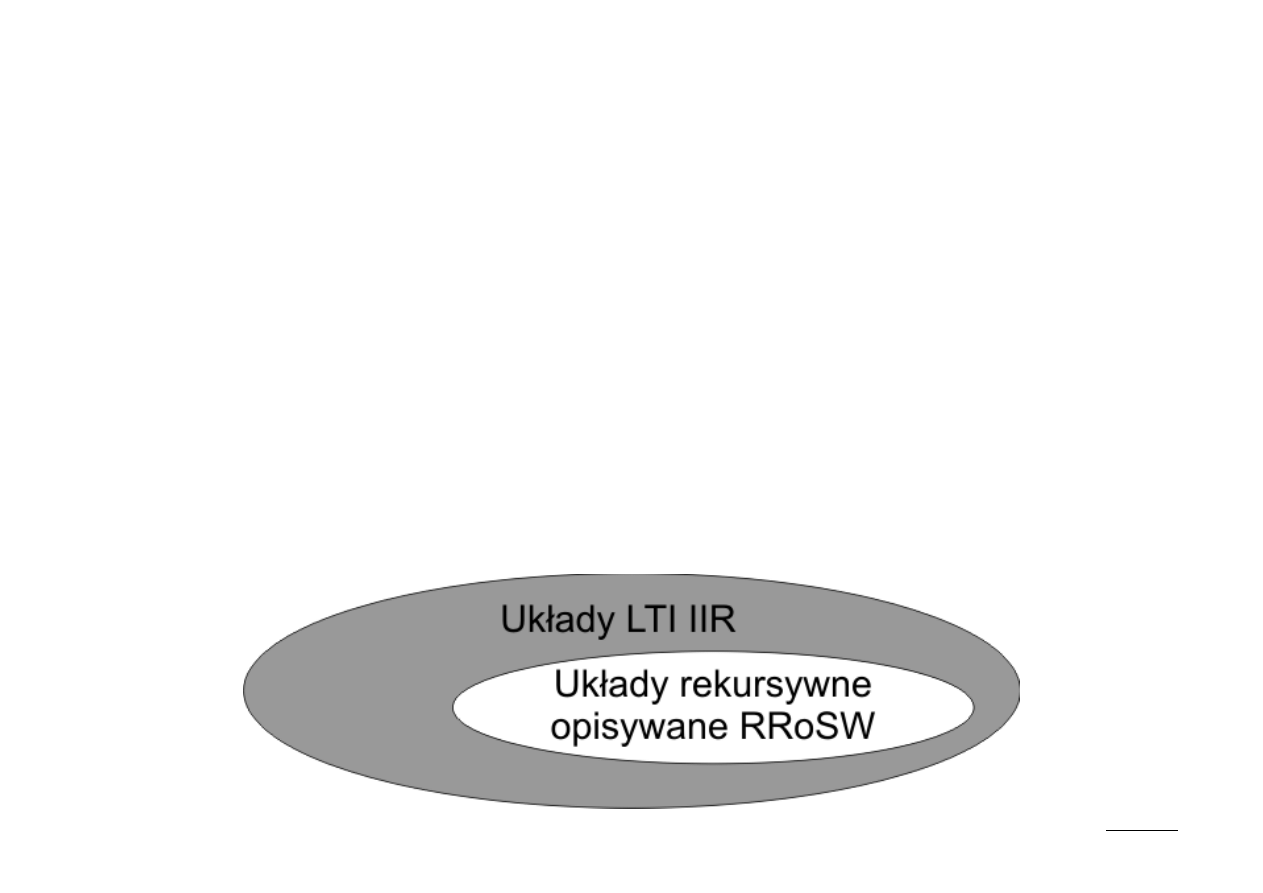
Nie jest prawdziwe twierdzenie odwrotne: nie każdy układ LTI IIR daje się opisać
równaniami różnicowymi o stałych współczynnikach (sprawdź np. h[n] = n
-2
·u[n]),
co oznacza, że układy rekursywne opisywane równaniami różnicowymi o stałych
współczynnikach są zaledwie podzbiorem wszystkich układów LTI IIR.
18 (44)

Stabilność filtrów rekursywnych
Jeśli układ jest opisywany liniowym równaniem różnicowym N-tego rzędu,
wówczas rozwiązanie równania jednorodnego ma postać:
y
h
[
n]=
∑
k =1
N
c
k
k
n
gdzie milcząco założyliśmy, że wszystkie pierwiastki wielomianu
charakterystycznego są rozdzielone.
Odpowiedź impulsowa takiego układu ma identyczną formę:
h[n]=
∑
k=1
N
c
k
k
n
gdzie współczynniki {c
k
} dobierane są dla spełnienia warunków początkowych:
y [−N ]= y [−N 1]=...= y [−1]=0
19 (44)

Otrzymana postać odpowiedzi impulsowej pozwala w prosty sposób powiązać
stabilność układu opisywanego równaniem różnicowym N-tego rzędu
z wartościami pierwiastków wielomianu charakterystycznego.
Warunek stabilności w sensie BIBO wymaga bezwzględnej sumowalności
odpowiedzi impulsowej, co w przypadku układów rekursywnych oznacza, że:
∑
n=0
∞
∣
∑
k =1
N
c
k
k
n
∣
≤
∑
k=1
N
∣
c
k
∣
∑
n=0
∞
∣
k
∣
n
Warunkiem koniecznym i wystarczającym do tego, aby przyczynowy układ IIR
opisywany RRoSW był stabilny, jest:
∀
k ∈[1, N ]
∣
k
∣
1
20 (44)

W przypadku pierwiastków wielokrotnych zachodzi (L-krotny pierwiastek λ
1
):
1
h[n]=
c
¿
nc
2
n
1
n
...c
L
n
L−1
1
n
c
L1
2
n
...c
N
N − L1
n
=
∑
k=1
L
c
k
⋅
n
k −1
⋅
1
n
∑
j=1
N −L
c
L j
⋅
j1
n
Co daje następujący warunek stabilności BIBO:
∑
n=0
∞
∣
∑
k =1
L
c
k
⋅
n
k −1
⋅
1
n
∑
j=1
N −L
c
L j
⋅
j1
n
∣
≤
≤
∑
n=0
∞
∑
k =1
L
∣
c
k
∣⋅∣
n∣
k −1
⋅∣
1
∣
n
∑
j=1
N − L
∣
c
L j
∣⋅∣
j1
∣
n
Przy silniejszej zbieżności ciągu wykładniczego niż potęgowego, warunek
stabilności jest identyczny jak w przypadku pierwiastków rozdzielonych.
21 (44)
Ex.: Sprawdzić stabilność filtru rekursywnego opisanego równaniem:
y [n]−3y [n−1]−4y [n−2]=x [n]2x[n−1]
Wielomian charakterystyczny ma postać:
n−2
2
−
3−4
=
n−2
1
−
4
=
0
Rozwiązanie jednorodne ma więc postać:
y
h
[
n]=
c
1
−
1
n
c
2
4
n
⋅
u[ n]
Wyznaczmy wartości c
1
oraz c
2
, przy zerowych warunkach początkowych:
y [0]=c
1
c
2
=
1
y [1]=−c
1
4 c
2
=
5
Skąd mamy, że odpowiedź impulsowa ma postać:
h[n]=
−
1
5
−
1
n
6
5
4
n
⋅
u[n]
Układ jest niestabilny w sensie BIBO, bowiem |-1| ≥ 1 oraz |4| ≥ 1.
22 (44)
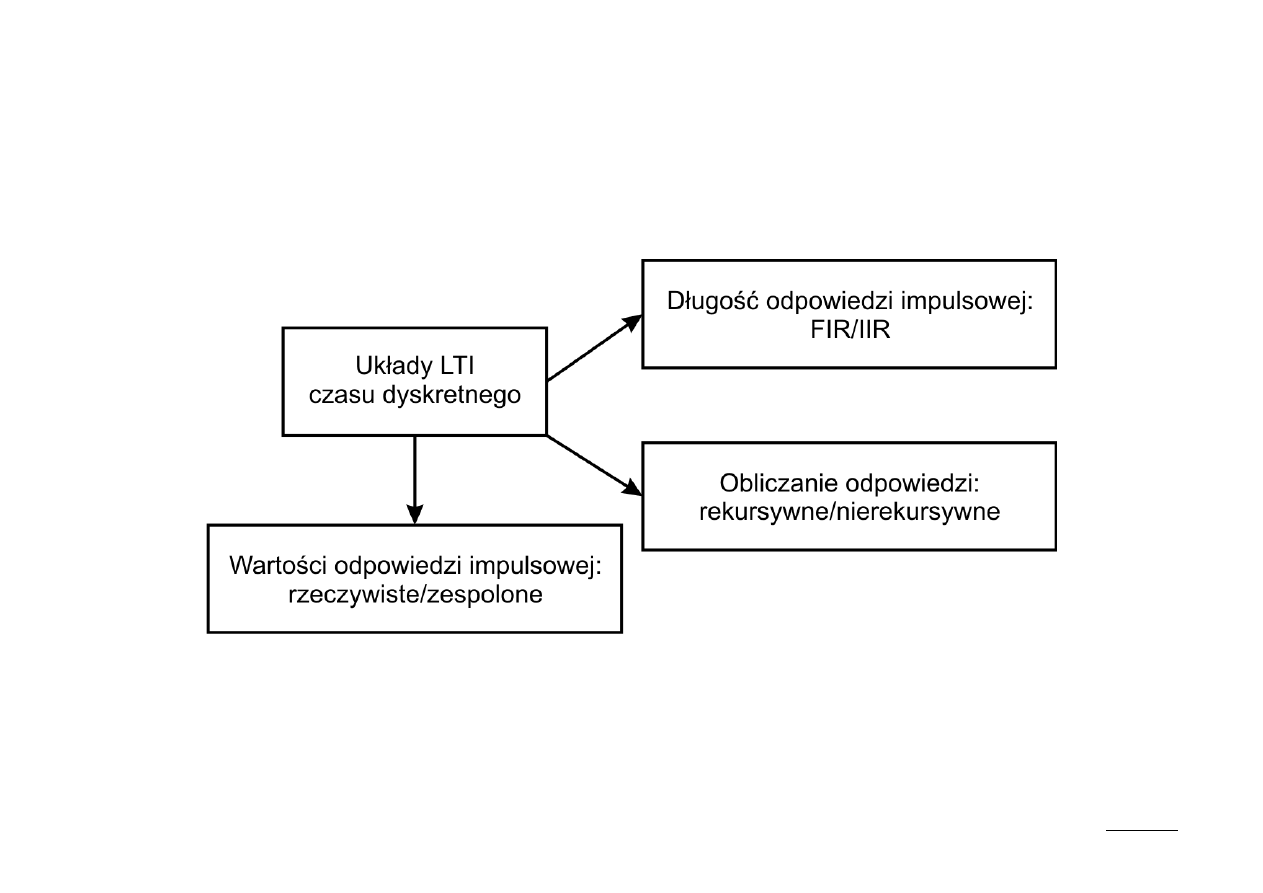
Klasyfikacja układów LTI czasu dyskretnego
23 (44)

Korelacja sygnałów czasu dyskretnego
Miarą podobieństwa pary sygnałów o skończonej energii x[n], y[n] jest sygnał
korelacji wzajemnej (cross-correlation) r
xy
[n] zdefiniowany jako:
r
xy
[
n]=
∑
k=−∞
∞
x [k ]⋅y [k −n]; n∈ℤ
Parametr n (tzw. lag) opisuje przesunięcie czasowe pomiędzy sygnałami. Sygnał
y[n] jest przesunięty względem sygnału odniesienia x[n] o n-próbek w prawo
dla dodatnich n i n-próbek w lewo dla ujemnych n.
Podobieństwo do splotu jest złudne, bowiem korelacja jest operacją całkowicie
odmienną. Splot pozwala wyliczyć odpowiedź układu o znanej charakterystyce
przy znanym pobudzeniu, natomiast korelacja wzajemna pozwala odnaleźć
podobieństwo sygnału analizowanego y[n] do zdefiniowanego wzorca x[n].
24 (44)

Przemienność korelacji wzajemnej
Jeśli zamienimy rolami sygnał analizowany i wzorcowy, wówczas korelacja
wzajemna przyjmie postać:
r
yx
[
n]=
∑
k =−∞
∞
y [k ]⋅x [k −n]=
∑
j=−∞
∞
y [ jn]⋅x [ j]=
∑
k =−∞
∞
x [ k ]⋅y [k n]
Skąd otrzymujemy, że:
r
yx
[
n]=r
xy
[−
n]
Wynikiem zamiany kolejności sygnałów w korelacji wzajemnej jest więc ciąg, który
jest ciągiem zawiniętym w stosunku do korelacji wyjściowej. Z tego względu r
xy
[n]
zawiera identyczną informację co r
yx
[n] na temat podobieństwa sygnałów x[n] oraz
y[n], dając swobodę interpretacji tego, co jest wzorcem, a co sygnałem
porównywanym.
25 (44)

Ex.: Wyznaczyć korelację wzajemną oraz splot ciągów:
x [n]=[... 0,0 ,2 ,−1,3,7 , 1,2 ,−3,0 ,0 ,...]
y [n]=[... 0,0,1 ,−1,2 ,−2, 4,1 ,−2,5,0 ,0 , ...]
Obliczmy najpierw próbkę r
xy
[0]:
r
xy
[
0]=
[
2 −1 3
7
1
2 −3 0
1 −1 2
−
2
4 1 −2 5
...
...
...
...
... ...
...
...
2
1
6 −14 4
2
6
0
]
r
xy
[
0]=
∑
k =−∞
∞
x [ k ]⋅y [k ]=216−14426=7
26 (44)

Obliczmy teraz próbkę r
xy
[-1]:
r
xy
[−
1]=
[
0
2
−
1
3
7
1
2
−
3
0
1 −1
2
−
2
4
1 −2
5
0
...
...
...
...
... ...
...
...
...
0 −2 −2 −6 28 1 −4 −15 0
]
r
xy
[−
1]=
∑
k=−∞
∞
x [k ]⋅y [k 1]=0
Obliczmy teraz próbkę r
xy
[+1]:
r
xy
[
1]=
[
2 −1
3
7
1
2 −3
0
0
0
1
−
1
2 −2 4
1
−
2 5
...
...
...
...
...
...
...
...
...
0 −1 −3 14 −2 8 −3
0
0
]
r
xy
[
1]=
∑
k =−∞
∞
x [ k ]⋅y [k −1]=13
27 (44)
Korelacja wzajemna sygnałów x[n] i y[n] jest więc ciągiem:
r
xy
[
n]=[10,−9,19 ,36 ,−14,33,0 ,7 ,13,−18,16 ,−7,5 ,−3]
Splot tych samych sygnałów jest z kolei ciągiem:
x [n]∗y [n]=[2,−3,8 ,−2,10 ,7 ,−10,48 ,
−
10,16 ,23 ,−2,16 ,−15]
28 (44)

Obliczanie korelacji i splotu
Pomimo zasadniczej różnicy pomiędzy operacją obliczania splotu i korelacji
wzajemnej dwóch sygnałów, podobieństwo matematyczne pozwala
przeprowadzać te operacje w podobny sposób:
–
przy splocie jeden z ciągów jest zawijany, potem przesuwany, mnożony przez
drugi ciąg i wreszcie wszystkie próbki iloczynów są sumowane,
–
przy korelacji sekwencja działań jest identyczna, za wyjątkiem zawijania ciągu.
Można zatem korelację obliczyć przy pomocy procedury obliczającej splot,
wykorzystując fakt, że:
r
xy
[
n]=x [n]∗y [−n]
29 (44)

Korelacja własna
Oprócz korelacji wzajemnej, definiuje się także korelację własną sygnału x[n]
(autocorrelation):
r
xx
[
n]=
∑
k=−∞
∞
x [k ] x [ k −n]
Zauważmy przy tym, że:
r
xx
[
0]=
∑
k =−∞
∞
x
2
[
k ]=E
x
co jest równe energii sygnału x[n].
Korelacja własna ciągu rzeczywistego x[n] jest ponadto ciągiem parzystym:
r
xx
[
n]=
∑
k=−∞
∞
x [k ]⋅x [k −n]=
∑
j=−∞
∞
x [ j]⋅x [ jn]=r
xx
[−
n]
30 (44)

Korelacje ciągów skończonych
W przypadku ciągów o skończonej długości wyrażenia na korelację własną
i wzajemną ulegają znaczącemu zawężeniu jeśli chodzi o granice sumowania.
W szczególności, jeśli ciągi x[n] oraz y[n] są ciągami przyczynowymi o długości N,
wówczas wyrażenia na korelację własną i wzajemną przyjmują postać:
r
xy
[
n]=
∑
k=−N 1
N −1
x [k ]⋅y [ k−n]
r
xx
[
n]=
∑
k =−N 1
N −1
x [k ]⋅x [ k −n]
31 (44)

Własności korelacji własnej i wzajemnej
Niech dany jest ciąg będący kombinacją liniową dwóch ciągów x[n] oraz y[n]
o skończonej energii:
w [n]=a⋅x [n]b⋅y [ n−k ]
gdzie a oraz b są stałymi, zaś k jest przesunięciem pomiędzy ciągami.
Energia sygnału w[n] wynosi:
∑
j=−∞
∞
a⋅x [n]b⋅y [n−k ]
2
=
...
...=a
2
∑
j=−∞
∞
x
2
[
n]b
2
∑
j=−∞
∞
y
2
[
n−k ]2 ab
∑
−∞
∞
x [n]⋅y [n−k ]=...
...=a
2
r
xx
[
0]2 ab r
xy
[
k ]b
2
r
yy
[
0]≥0
32 (44)
Zakładając, że b≠0 otrzymujemy:
r
xx
[
0]
a
b
2
2 r
xy
[
k ]
a
b
r
yy
[
0]≥0
Otrzymaliśmy równanie kwadratowe, które może mieć co najwyżej jeden
pierwiastek. Wyznacznik tego równania musi być zatem niedodatni:
4
r
xy
2
[
k ]−r
xx
[
0]⋅r
yy
[
0]
≤
0
Skąd wynika zależność pomiędzy korelacją własną a wzajemną:
∣
r
xy
[
k ]∣≤
r
xx
[
0]⋅r
yy
[
0]
Powyższy wynik narzuca górne ograniczenie na wartość korelacji wzajemnej
dwóch sygnałów. Zakładając, że y[n] = x[n] otrzymamy, że:
∣
r
xx
[
k ]∣≤r
xx
[
0]
Co oznacza, że korelacja własna osiąga maksimum dla zerowego przesunięcia.
33 (44)
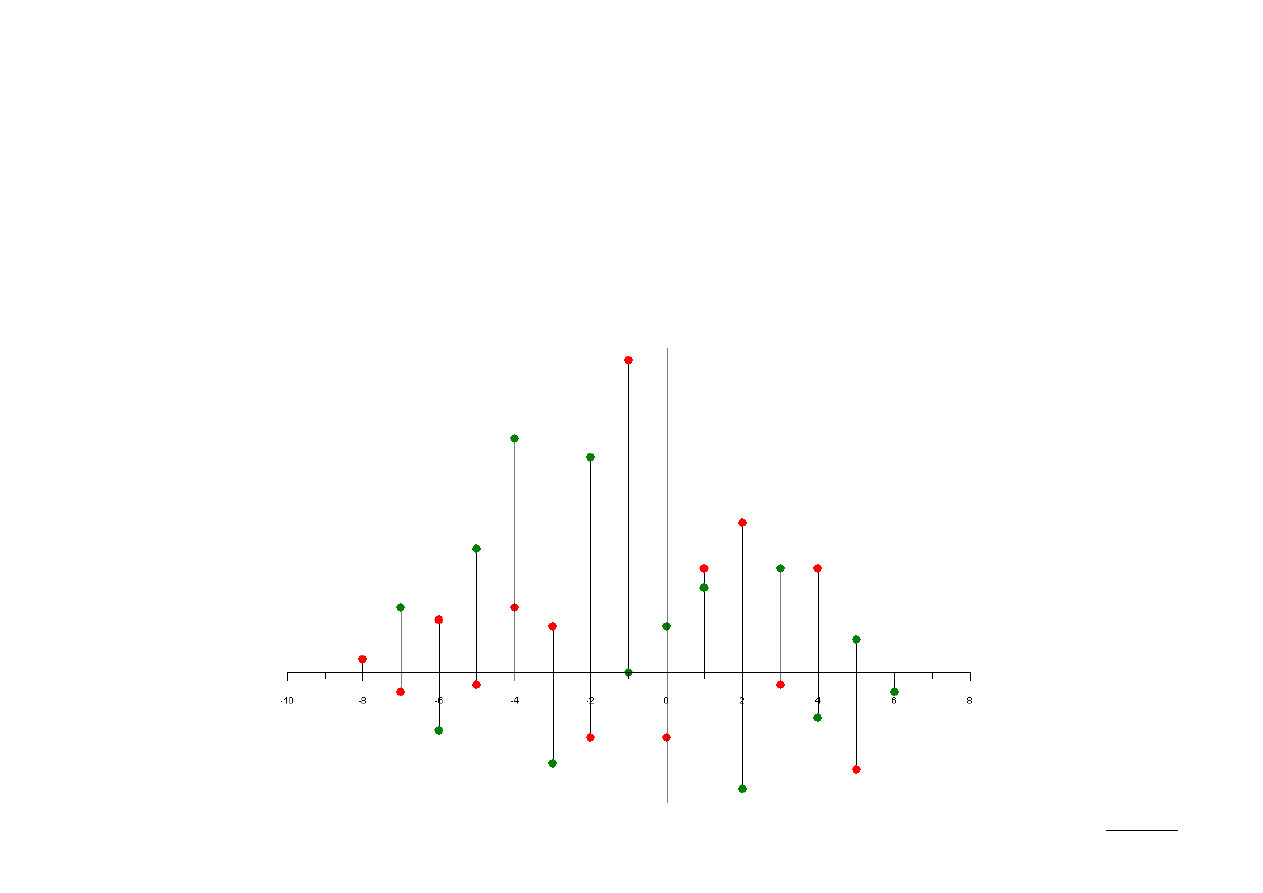
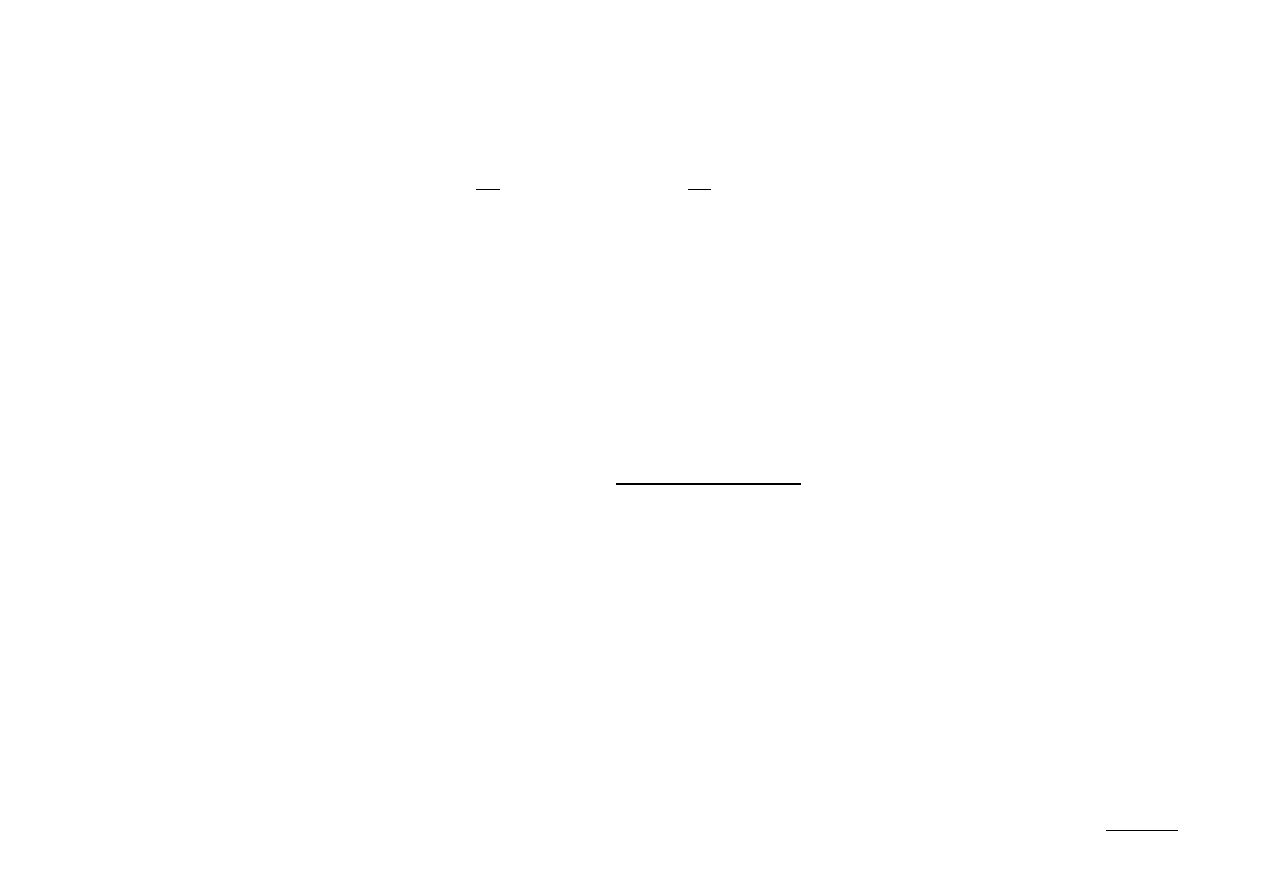
Ex.: Wyznaczyć korelację własną sygnału:
x [n]=a
n
⋅
u[n] ;0a1
Ponieważ sygnał x[n] jest nieskończony, korelacja własna również będzie ciągiem
nieskończonym.
Rozważmy dwa przypadki:
–
k ≥ 0, wówczas:
r
xx
[
k ]=
∑
j=k
∞
x [ j ]⋅x [ j−k ]=
∑
j=k
∞
a
j
⋅
a
j−k
Powyższy szereg jest zbieżny do:
r
xx
[
k ]=
a
k
1−a
2
⋅
u[k ]
34 (44)
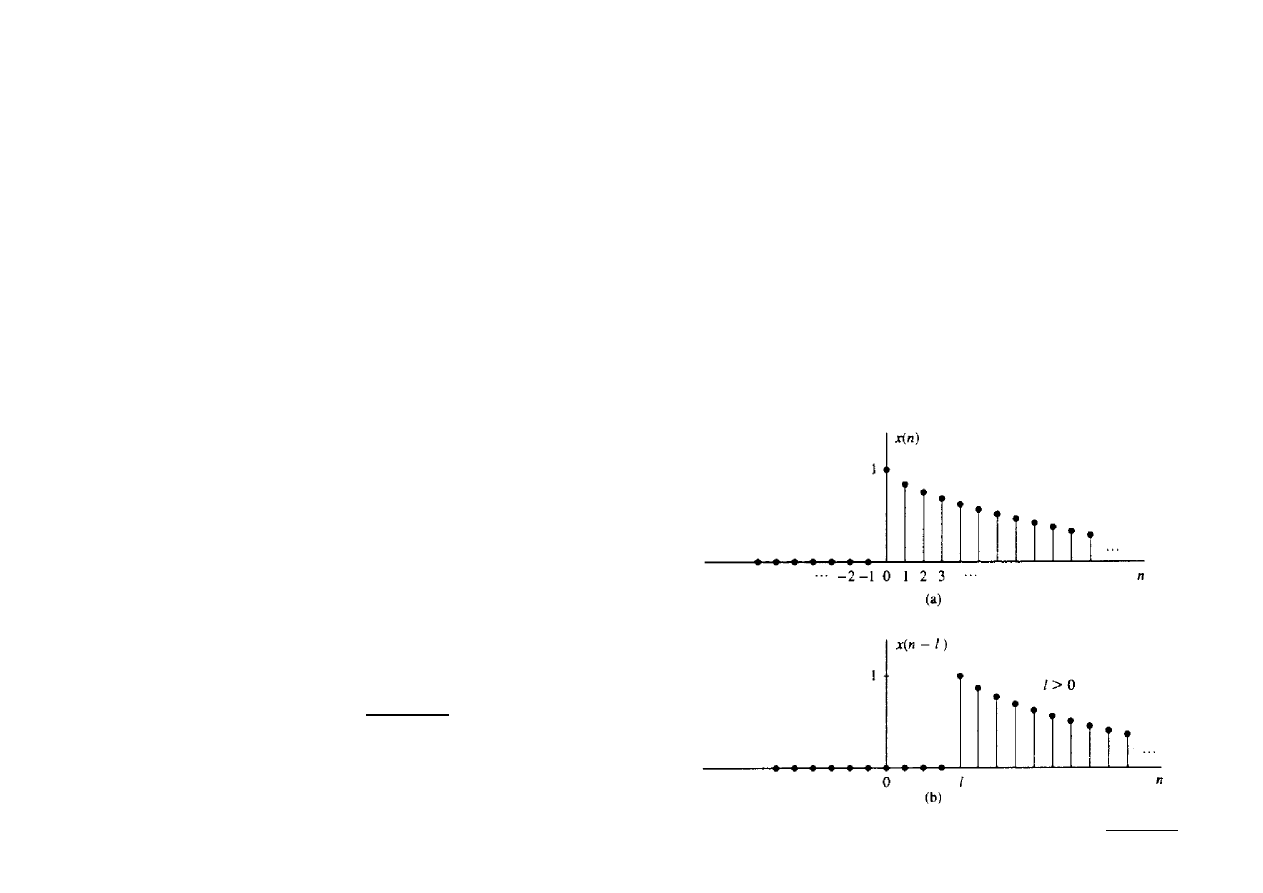
–
z drugiej strony, jeśli k < 0, wówczas:
r
xx
[
k ]=
∑
j=0
∞
x [ j ]⋅x [ j−k ]=
∑
j=0
∞
a
j
⋅
a
j−k
=
a
−
k
1
1−a
2
Ponieważ jednak k < 0, więc:
r
xx
[
k ]=a
∣
k∣
1
1−a
2
Łącząc rozwiązania dla dodatnich
i ujemnych k otrzymujemy w sumie, że:
r
xx
[
k ]=a
∣
k∣
1
1−a
2
Zauważmy, że:
r
xx
[
k ]=r
xx
[−
k ] ; r
xx
[
0]=
1
1−a
2
35 (44)
Korelacje ciągów okresowych
Do tej pory zajmowaliśmy się korelacjami sygnałów o skończonej energii. Obecnie
wprowadzimy definicję korelacji sygnałów o skończonej mocy, w tym
w szczególności sygnałów okresowych.
Niech x[n] oraz y[n] będą sygnałami o skończonej mocy. Ich korelacja wzajemna
dana jest w postaci:
r
xy
[
k ]= lim
M ∞
1
2M1
∑
j=−M
M
x [ j ]⋅y [ j−k ]
Jeśli z kolei x[n] = y[n] otrzymamy wyrażenie na korelację własną:
r
xx
[
k ]= lim
M ∞
1
2M1
∑
j=−M
M
x [ j ]⋅x [ j−k ]
36 (44)
Jeśli w szczególności sygnały x[n] oraz y[n] będą okresowe z okresem N,
powyższe sumy korelacyjne liczone w przedziale nieskończenie szerokim będą
okresowo równe sumom liczonym po pojedynczym okresie:
r
xy
[
k ]=
1
N
∑
j=0
N −1
x [ j ]⋅y [ j−k ]
r
xx
[
k ]=
1
N
∑
j=0
N −1
x [ j ]⋅x [ j−k ]
Czynnik 1/N występujący w powyższych sumach można traktować jak czynnik
normalizacyjny.
37 (44)
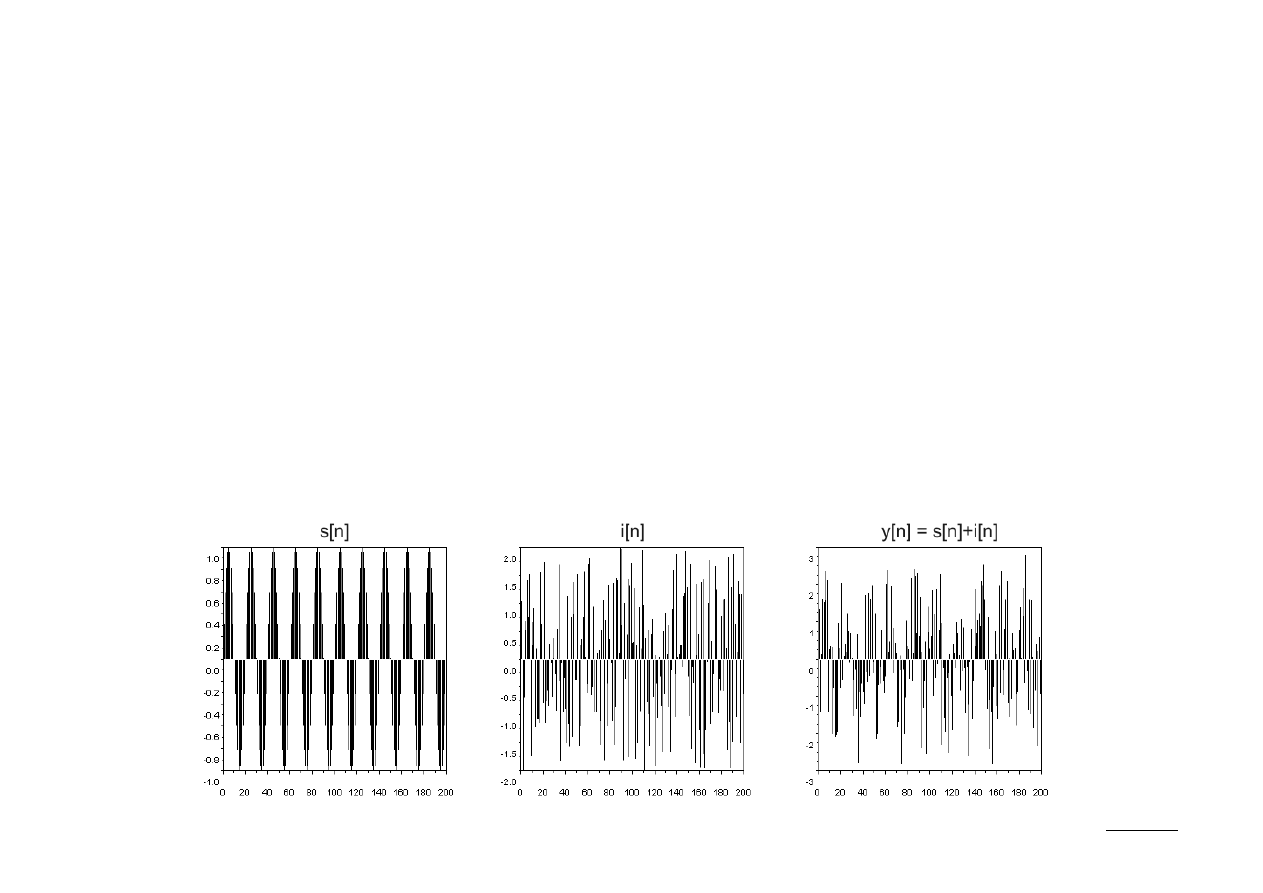
Zastosowania korelacji – wykrywanie okresowości
Funkcje korelacji często wykorzystuje się do wykrywania regularności
(okresowości) sygnałów użytecznych zakłóconych np. sygnałem szumu.
Niech sygnał y[n] dany jest w postaci:
y [n]=s[n]i [n]
gdzie: s[n] jest użytecznym sygnałem okresowym o nieznanym okresie N, zaś i[n]
reprezentuje losowe zakłócenie/szum (interference, noise).
Załóżmy, że obserwujemy y[n] w przedziale znacznie dłuższym niż okres N.
38 (44)
Obliczmy korelację własną zakładając tymczasowo, że okres wynosi M:
r
yy
[
k ]=
1
M
∑
j=0
M −1
y [ j ]⋅y [ j−k ]
Po podstawieniu jawnej postaci sygnału otrzymamy:
r
yy
[
k ]=1
M
∑
j=0
M −1
s[ j]i [ j]
⋅
s[ j−k ]i [ j−k ]
=
...
...= 1
M
∑
j=0
M −1
s [ j ] s[ j−k ]
∑
j =0
M −1
s[ j]i[ j−k ]i [ j ] s[ j−k ]
∑
j=0
M −1
i [ j ]i [ j−k ]
=
...
...=r
ss
[
k ]r
si
[
k ]r
is
[
k ]r
ii
[
k ]
39 (44)
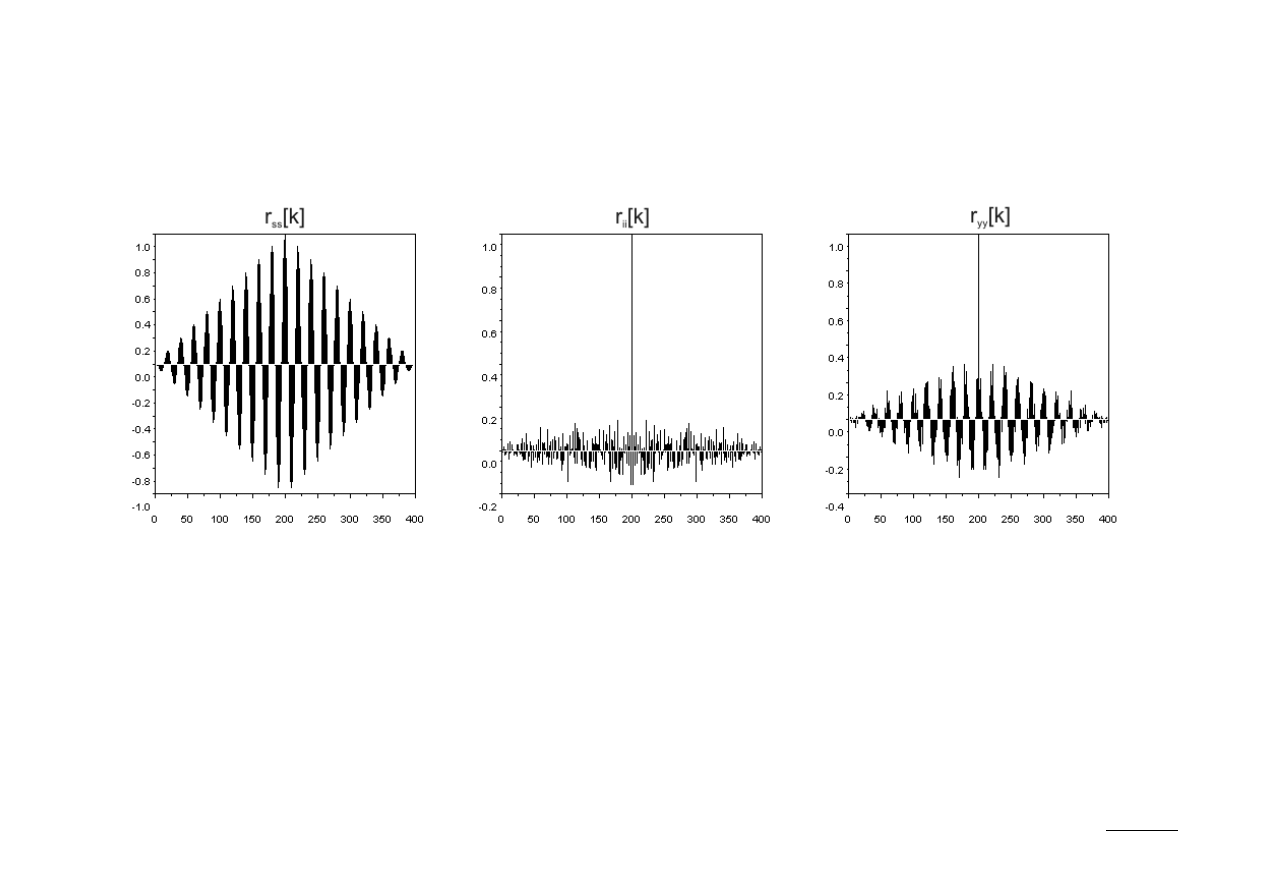
Otrzymaliśmy wynik mówiący, że:
r
yy
[
k ]=r
ss
[
k ]r
si
[
k ]r
is
[
k ]r
ii
[
k ]
Wyraz r
ss
[k] to korelacja własna sygnału użytecznego s[n], okresowa z lokalnymi
maksimami ulokowanymi dla k = 0, N, 2N itd. Korelacje wzajemne r
si
[k] oraz r
is
[k]
są względnie małe, ponieważ oba sygnały nie są ze sobą w żaden sposób
powiązane. Korelacja własna szumu r
ii
[k] osiąga maksimum dla k=0, lecz z uwagi
na losowość szumu szybko zanika dla zwiększających się przesunięć k.
40 (44)
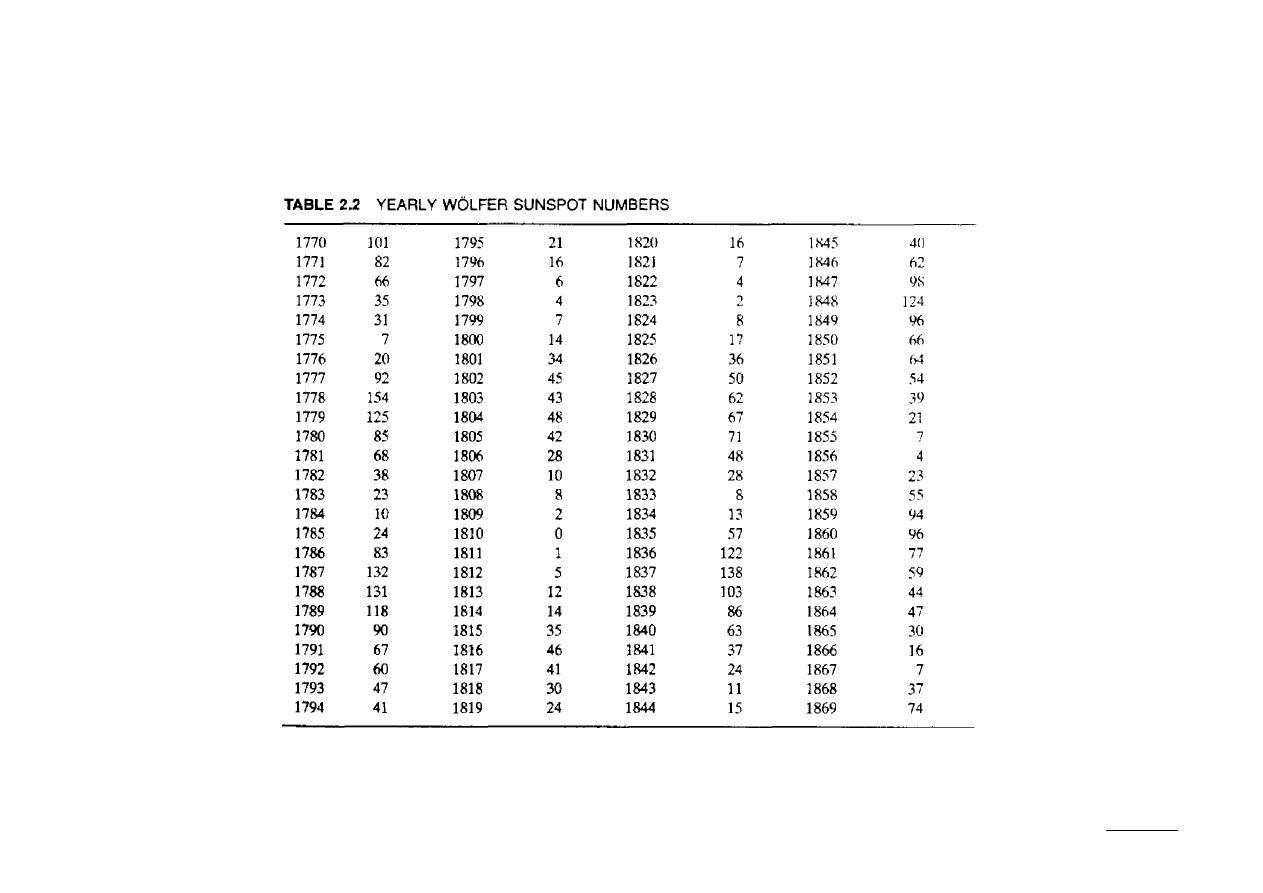
Ex.: Wykrywanie okresowej aktywności Słońca poprzez pomiar ilości plam.
Pomiary ilości plam na Słońcu (plam Wölfera) w latach 1770-1869:
41 (44)
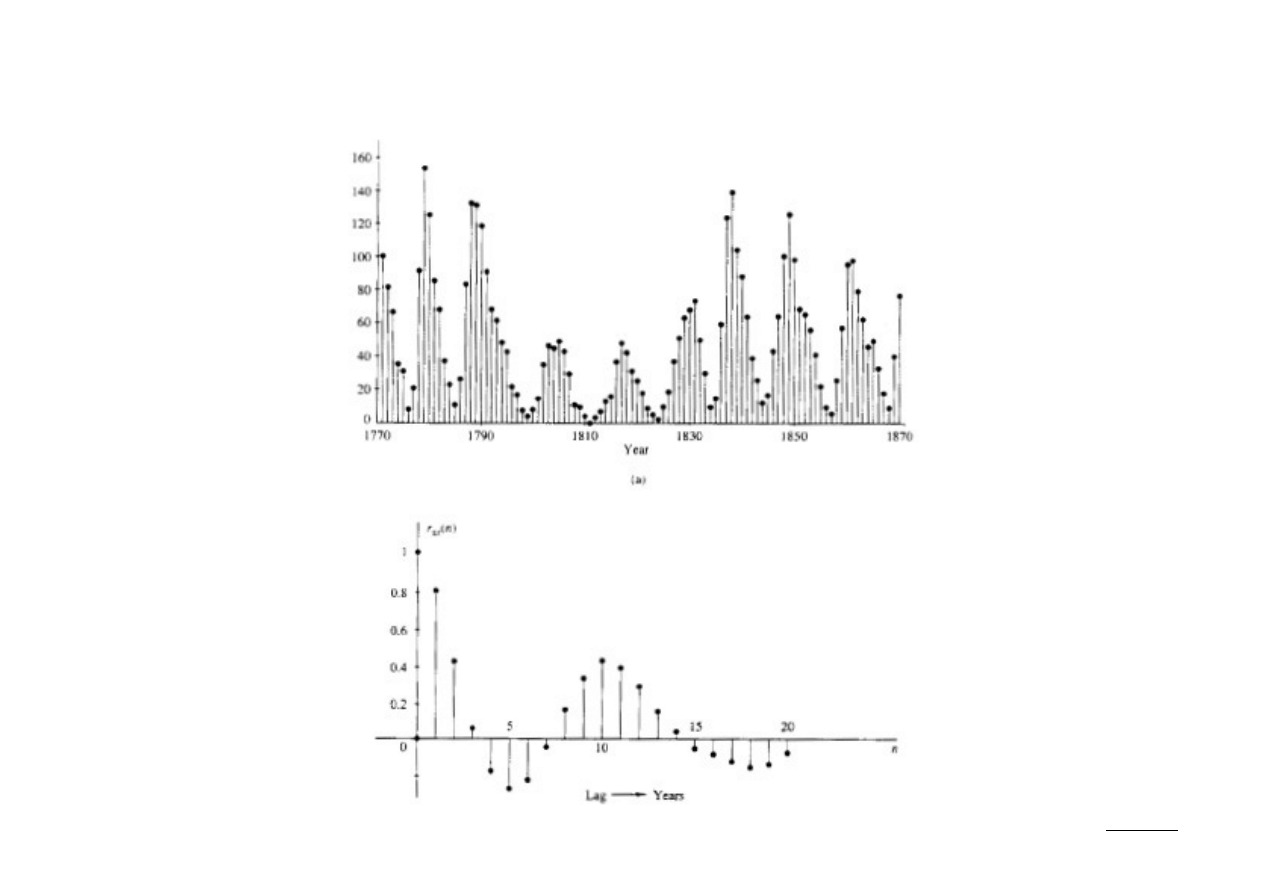
Wykres ilości plam w[n] (aktywności słonecznej) oraz wykres autokorelacji r
ww
[k].
42 (44)
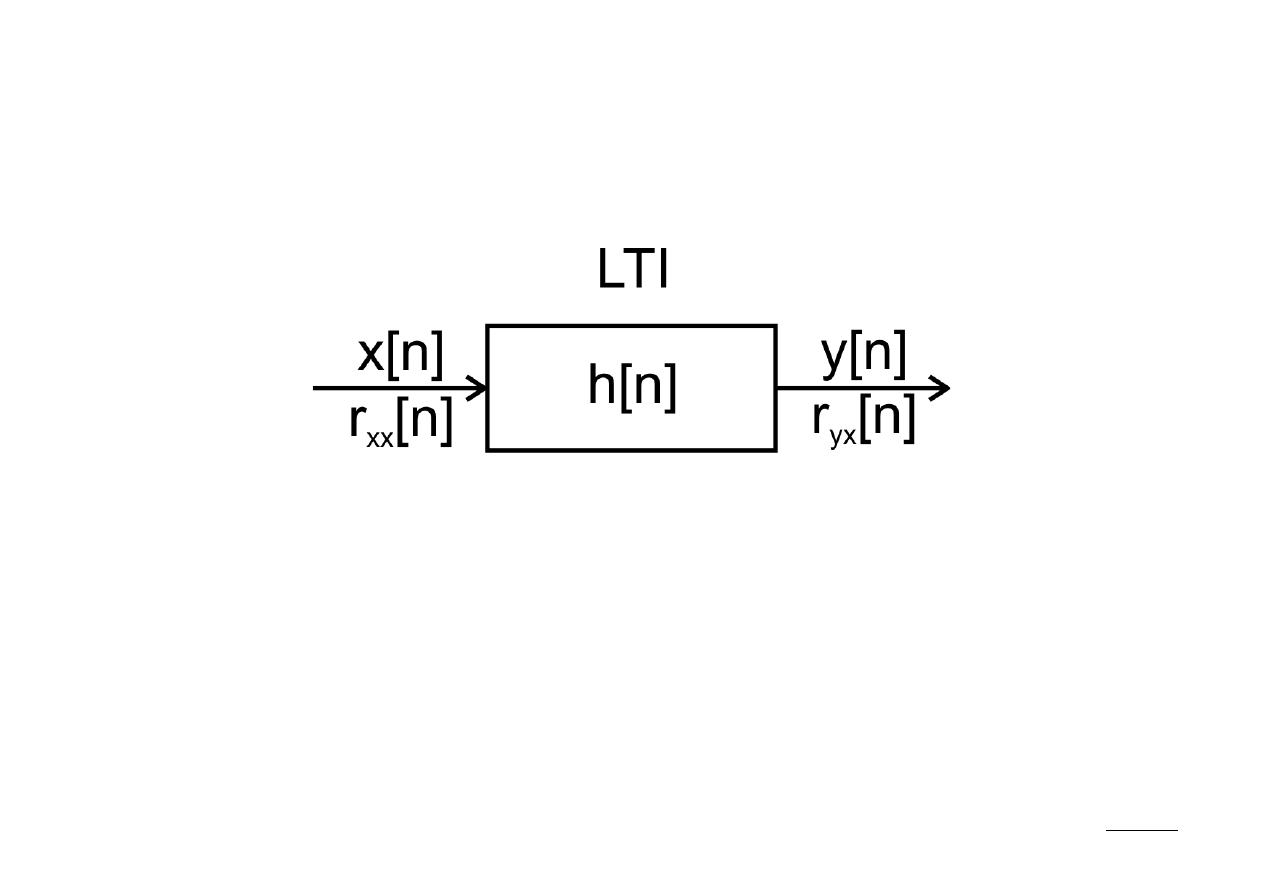
Korelacje zależności wejściowo-wyjściowych
Załóżmy, że sygnał x[n] o korelacji własnej r
xx
[k] podano na wejście układu LTI o
odpowiedzi impulsowej h[n]. Odpowiedź układu wynosić będzie:
y [n]=h[n]∗x [n]=
∑
j=−∞
∞
h[ j]⋅x [n− j]
Korelacja wzajemna pomiędzy pobudzeniem i odpowiedzią wyniesie:
r
yx
[
k ]= y [k ]∗x [−k ]=
h[ k ]∗x [k ]
∗
x [−k ]=h[ k ]∗
x [k ]∗x [−k ]
r
yx
[
k ]=h[k ]∗r
xx
[
k ]
r
xy
[
k ]=h[−k ]∗r
xx
[
k ]
Wynika stąd, że korelacja wzajemna pobudzenia i odpowiedzi układu jest
splotem odpowiedzi impulsowej z korelacją własną pobudzenia.
43 (44)
Z drugiej strony, z własności splotu wynika, że odpowiedzią układu na pobudzenie
sygnałem r
xx
[k] będzie r
xy
[k]:
Korelacja własna odpowiedzi wyniesie z kolei:
r
yy
[
k ]= y [ k ]∗y [−k ]=...=r
hh
[
k ]∗r
xx
[
k ]
Oznacza to, że układ nie zmienia charakteru pobudzenia (sygnał o skończonej
energii bądź mocy).
44 (44)
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron