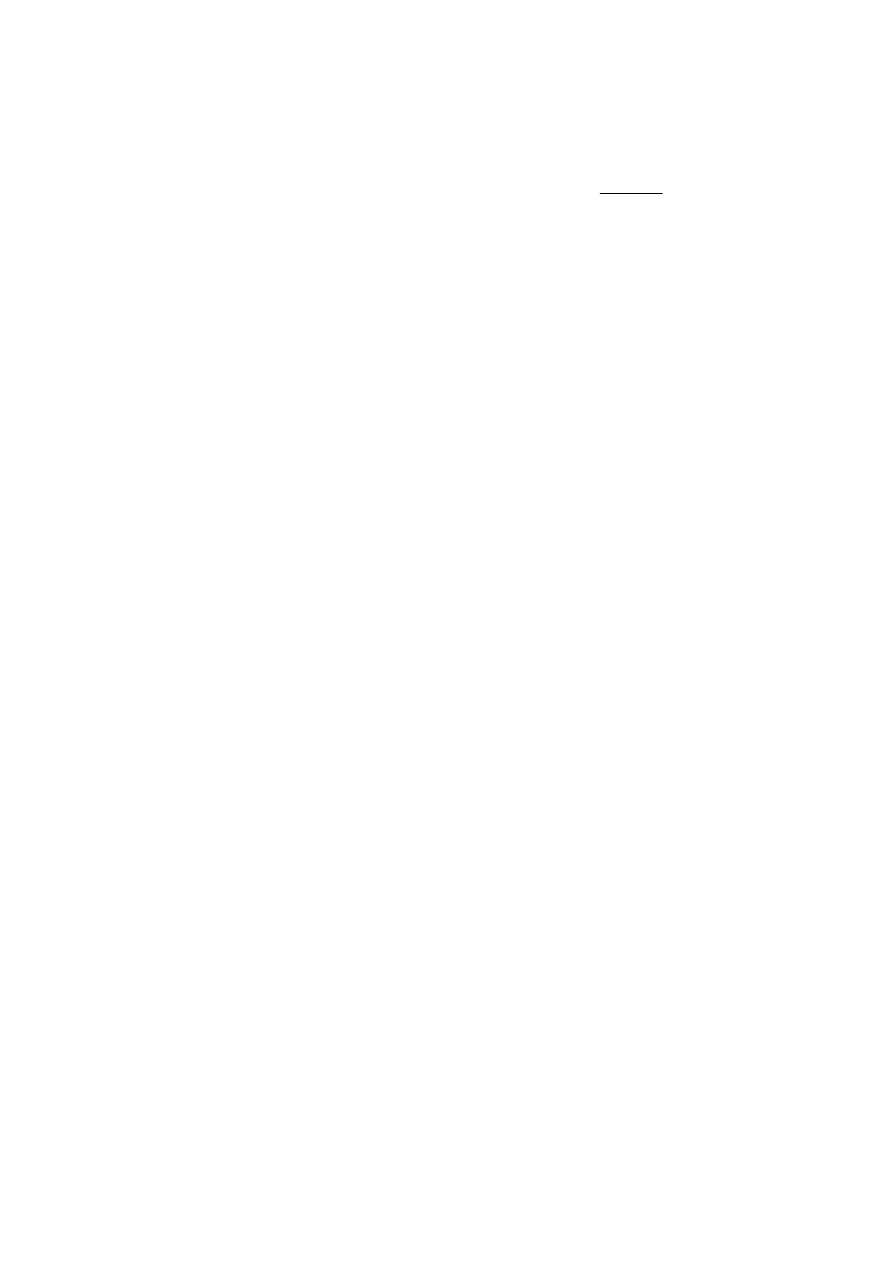
Zadanie 1
Opis: Należało narysować odpowiedź układu o czystym sprzężeniu zwrotnym. Główna ścieżka
zawierała element proporcjonalny o K
R
=4 i obiekt o transmitancji
3
)
1
(
)
(
Ts
K
s
G
o
+
=
i K
o
=1 i T=2s.
Wymuszenie było stałe w przedziale od 0 do 10 i wynosiło 1 a następnie było równe 2
Wykonanie:
clc
clear
all
Kr=4;
Ko=1;
T=2;
L1=[Kr*Ko];
M1=[T^3 3*T^2 3*T 1];
[L,M]=cloop(L1,M1);
printsys(L,M,
's'
);
t=0:0.01:50;
y1=1*ones(1,1001);
y2=2*ones(1,4000);
y=[y1,y2];
[q,w]=lsim(L,M,y,t);
okno=figure(1);
set(okno,
'menubar'
,
'none'
);
set(okno,
'name'
,
'zadanie 1'
);
plot(t,y);
hold
on
plot(t,q,
'r'
);
grid
on
xlabel(
'czas'
);
ylabel(
'wymuszenie i odpowiedz'
);
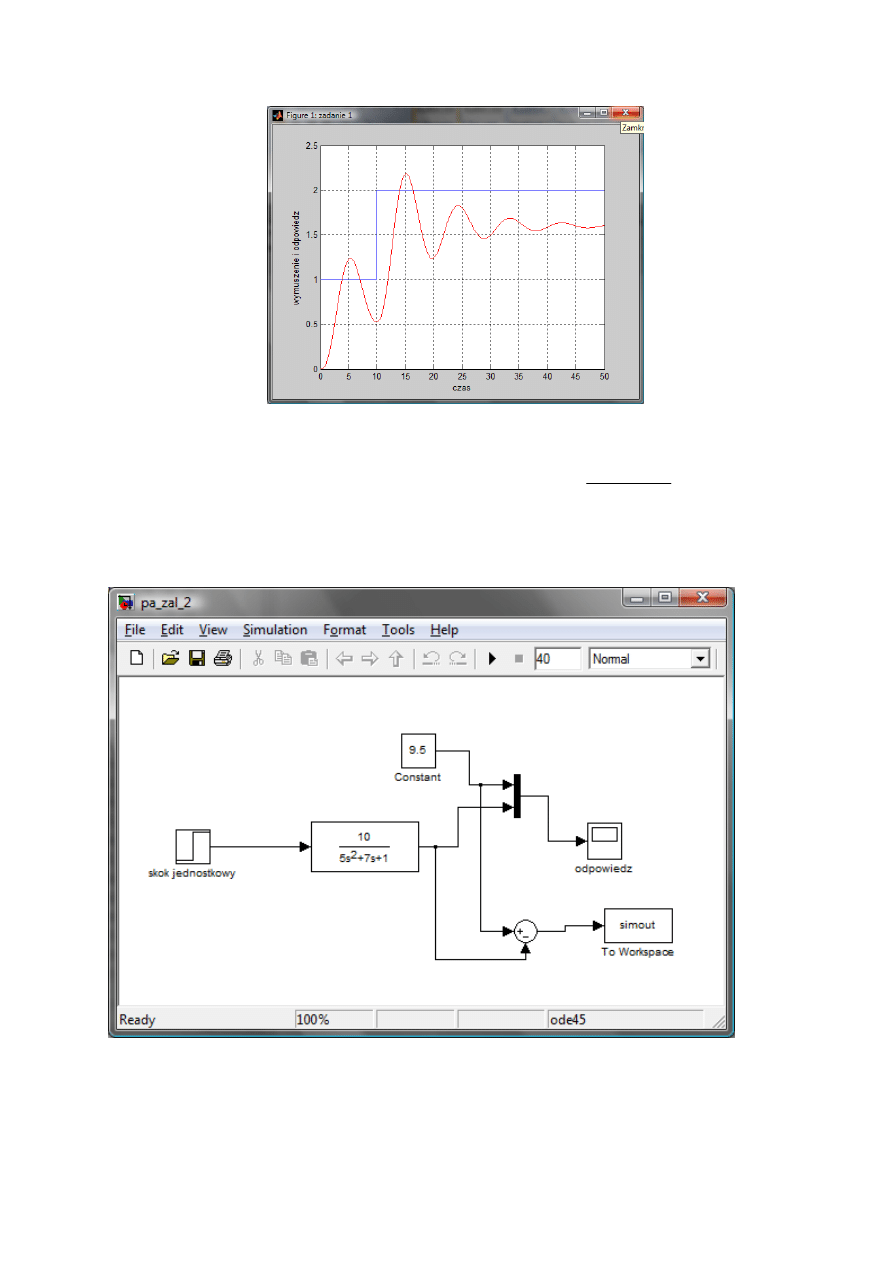
Zadanie 2
Opis: Należało wyznaczyć czas regulacji obiektu o transmitancji
1
7
5
10
)
(
2
+
+
=
s
s
s
G
przy 5%
odchyłce
Wykonanie:
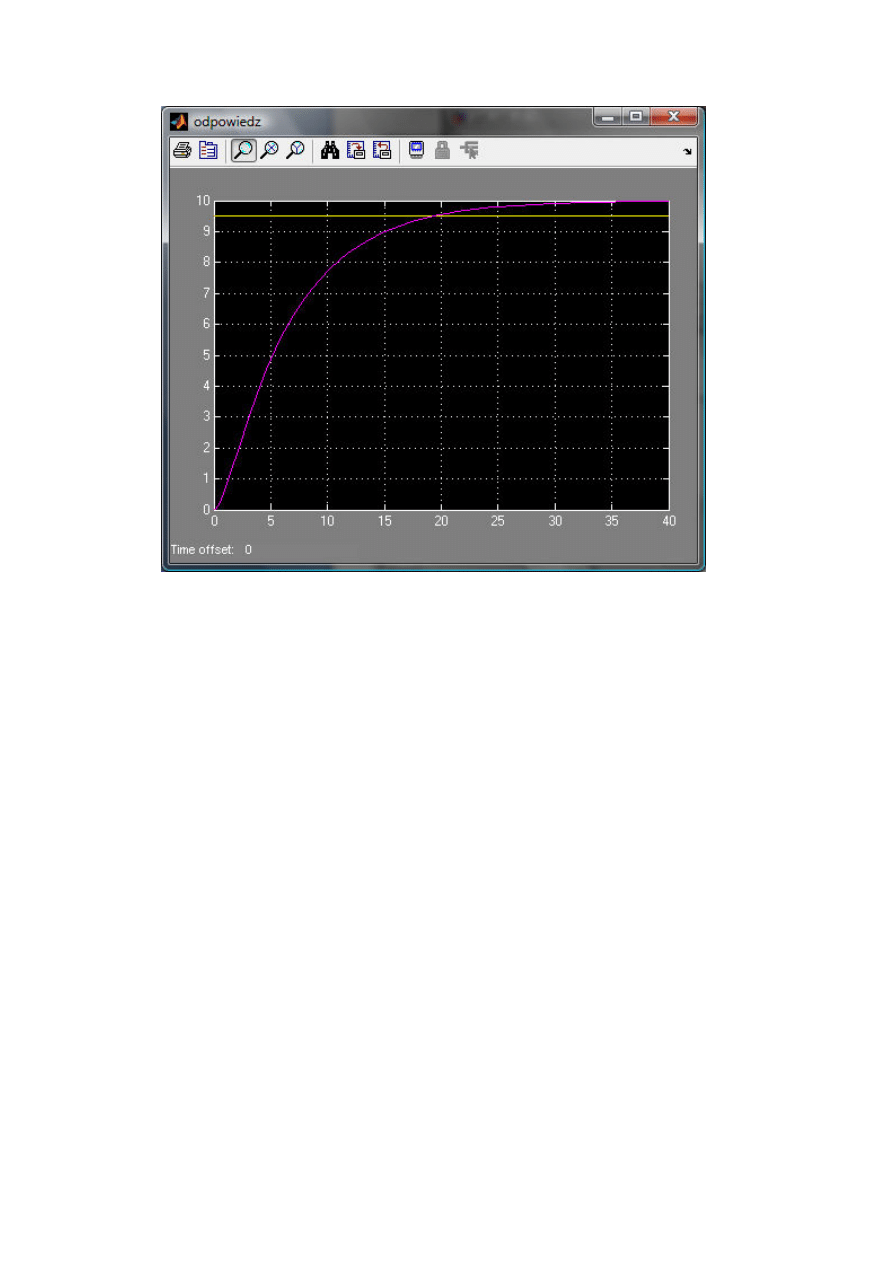
Sygnał dąży do 10 więc jego 95% to 9,5
Parametry skoku: czas skoku=0, wartość początkowa=0, wartość końcowa=1
Po odjęciu otrzymujemy różnicę sygnałów która będzie ujemna gdy sygnał przekroczy 9,5
Wybieramy eksport jako „Structure with Time”
Wpisujemy w linii komend: simout.signals.values i szukamy elementu najbliższego zeru.
Znajdujemy jego pozycję w wektorze wartości (u nas to było np. 18)
Wyświetlamy odpowiadającą tej wartości chwilę czasu: simout.time(18) i na ekranie pojawia
się czas regulacji
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron