
Infrastruktura transportu
drogowego
wykład 3
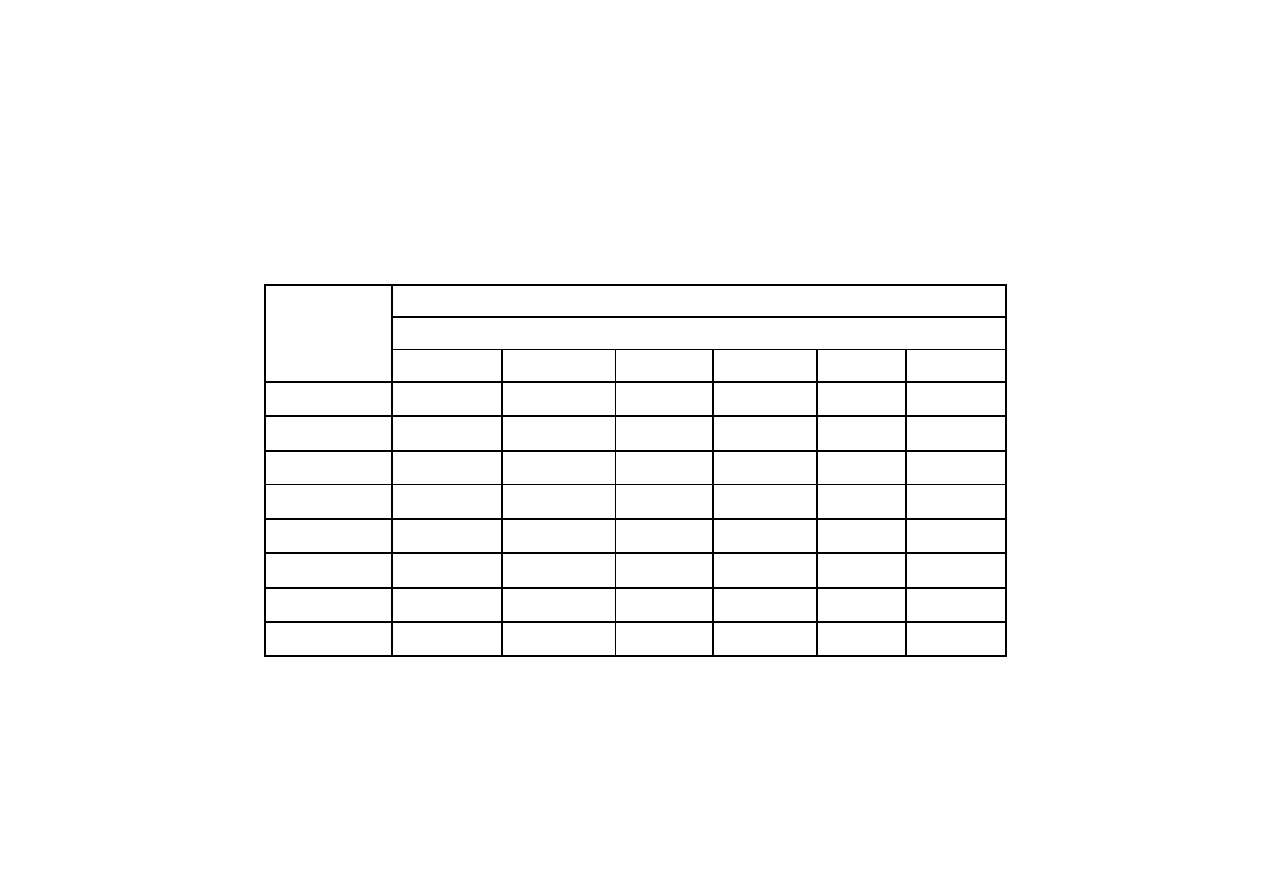
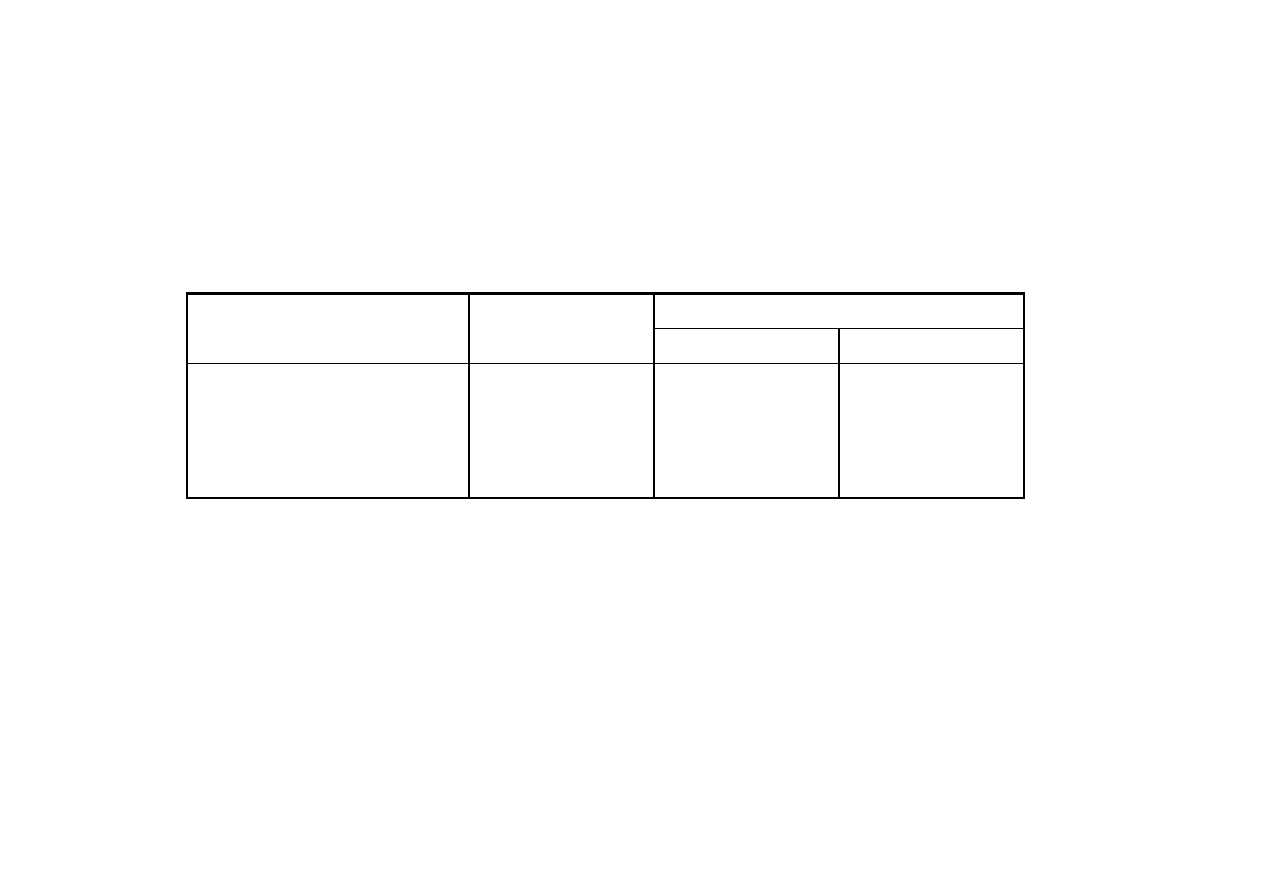
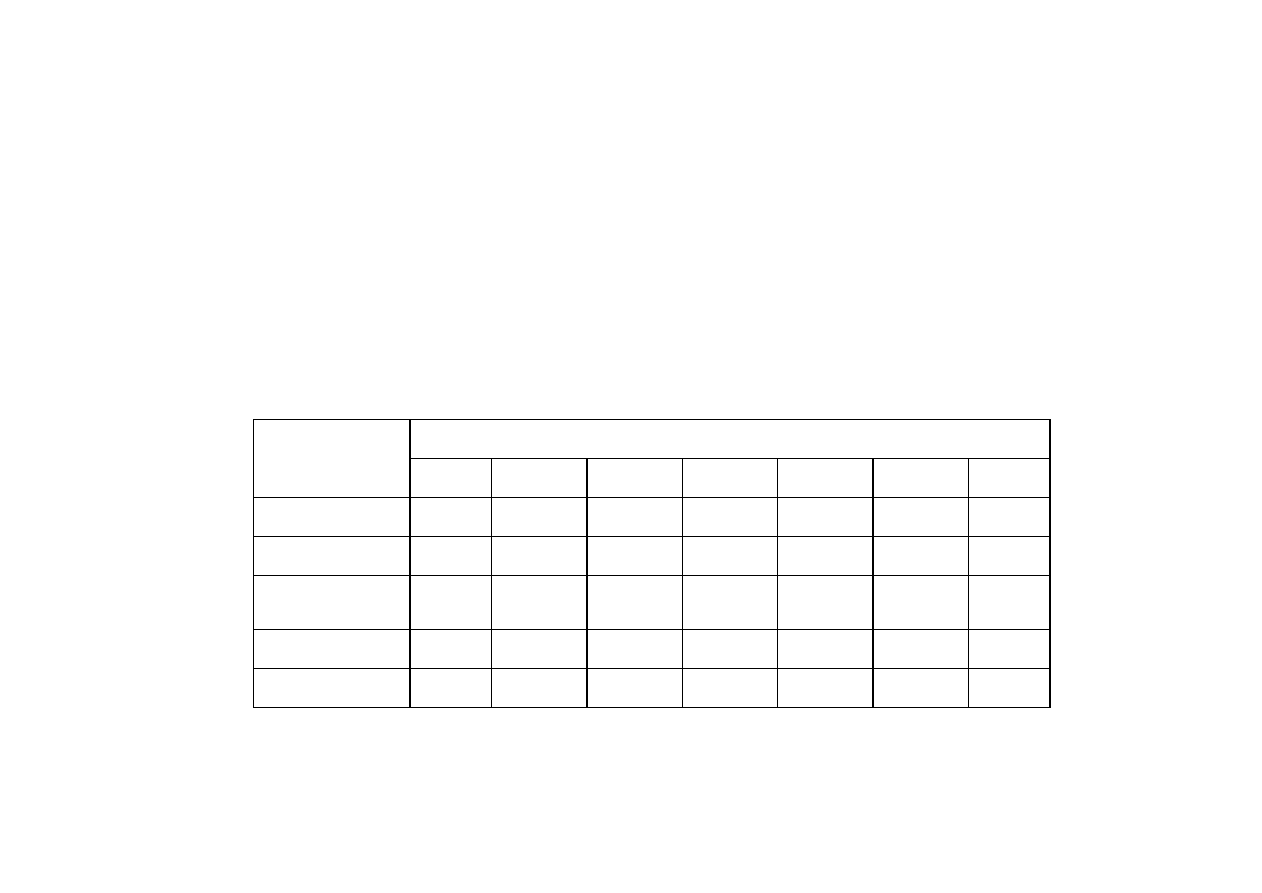
Promienie łuków poziomych przyjmowane w zależności od
prędkości projektowej i warunków przechyłki
R [m]
V
p
[m/h]
Pochylenie poprzeczne i
yR
[%] (przechyłka)
2
3
4
5
6
7
120
3000
2000
1500
1200
900
750
110
2500
1800
1400
1000
800
600
100
2000
1400
1000
800
600
500
90
1500
1000
750
600
500
400
80
1100
800
600
450
350
300
70
800
600
400
300
250
200
60
500
350
250
200
150
135
50
350
250
175
125
100
80

Zwiększenie prędkości na istniejącej drodze można uzyskać
poprzez:
- zwiększenie promieni łuków poziomych;
- zastosowanie dłuższych krzywych przejściowych
Długość krzywej przejściowej powinna umożliwić wykonanie przechyłki
(na długości rampy przechyłkowej) przy zachowaniu warunku
nieprzekroczenia największego dopuszczalnego dodatkowego pochylenia
podłużnego krawędzi jezdni.
Długość łuku kołowego pomiędzy krzywymi przejściowymi nie powinna
być mniejsza od drogi, jaką przebywa pojazd jadący z prędkością V
p
w
czasie 2 sekund.
Łuki kołowe nie wymagają połączenia z prostą za pomocą krzywych
przejściowych, jeżeli promienie łuków są równe co najmniej 3000 m, przy
V
p
80 km/h oraz 1500 m przy V
p
80 km/h.
Widoczność pozioma
Długość drogi hamowania i odległość widoczności na
zatrzymanie określa się uwzględniając, że:
podczas hamowania energia kinetyczna samochodu jest
zmniejszana lub sprowadzana do zera.
Podstawowym czynnikiem dla procesu hamowania jest
przyczepność opony z nawierzchnią. Wygoda jazdy jest
uzależniona od warunków hamowania.
Zbyt duże opóźnienie może być niebezpieczne lub też
przykro odczuwane przez podróżnych.
Długość drogi hamowania wyznacza się z porównania pracy
hamowania i energii kinetycznej samochodu
2
2
0
V
M
L
P
s
H
H
gdzie:
P
H
= - a
s
.
M
s
siła hamowania [N],
L
H
- długość drogi hamowania [m],
M
s
- masa samochodu [kg],
V
0
- prędkość samochodu na początku hamowania [m/s],
(-a
s
) - opóźnienie [m/s
2
]
Przyjmuje się najczęściej następujące wartości opóźnienia:
– 1,5 m/s
2
dla ruchu na drogach międzynarodowych,
– 2,5 m/s
2
dogodne,
– 4,2 m/s
2
niewygodne,
6,0 m/s
2
największe dopuszczalne.

W Polsce zalecany jest następujący wzór określający długość drogi hamowania
n
xR
2
p
H
i
254
V
L
[m]
gdzie:
V
0
- jak poprzednio,
- współczynnik wykorzystania przyczepności podłużnej ( = 1 przy hamowaniu
panicznym, = 0,7 przy hamowaniu bezpiecznym),
xR
- współczynnik przyczepności podłużnej
i
n
- spadek lub wzniesienie drogi („+” jazda w górę, „-” jazda w dół).

Odległość widoczności na zatrzymanie (tzw. długość dynamiczna samochodu) jest obliczana z
wyrażenia
n
xR
2
m
m
r
H
r
WH
i
254
V
V
t
278
,
0
L
L
L
[m]
gdzie:
V
m
- prędkość miarodajna [km/h],
L
r
- długość odcinka drogi przejechana w czasie reakcji kierowcy t
r
z prędkością
początkową (w Polsce przyjmuje się prędkość miarodajną V
m
).
Minimalny czas reakcji ocenia się na 0,961,27 s.
L
H
- długość drogi hamowania.
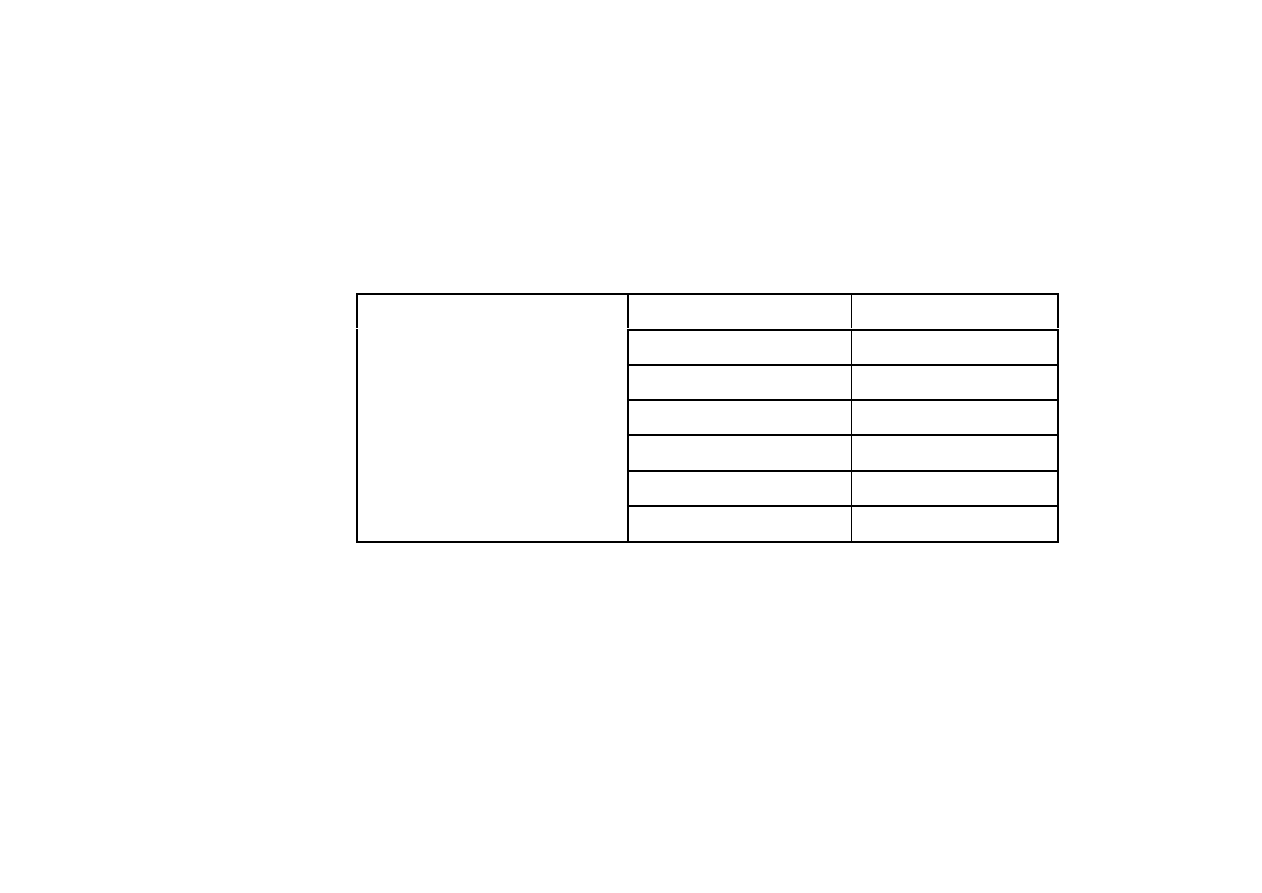
Wartości współczynników przyczepności podłużnej
xR
*)
mokra
Rodzaj i stan
nawierzchni
sucha
czysta
zabrudzona
Tłuczniowa
Bitumiczna
Betonowa
Drobny bruk
0,70
0,55
0,65
0,55
0,5
0,3
0,5
0,3
0,4
0,2
0,3
0,2
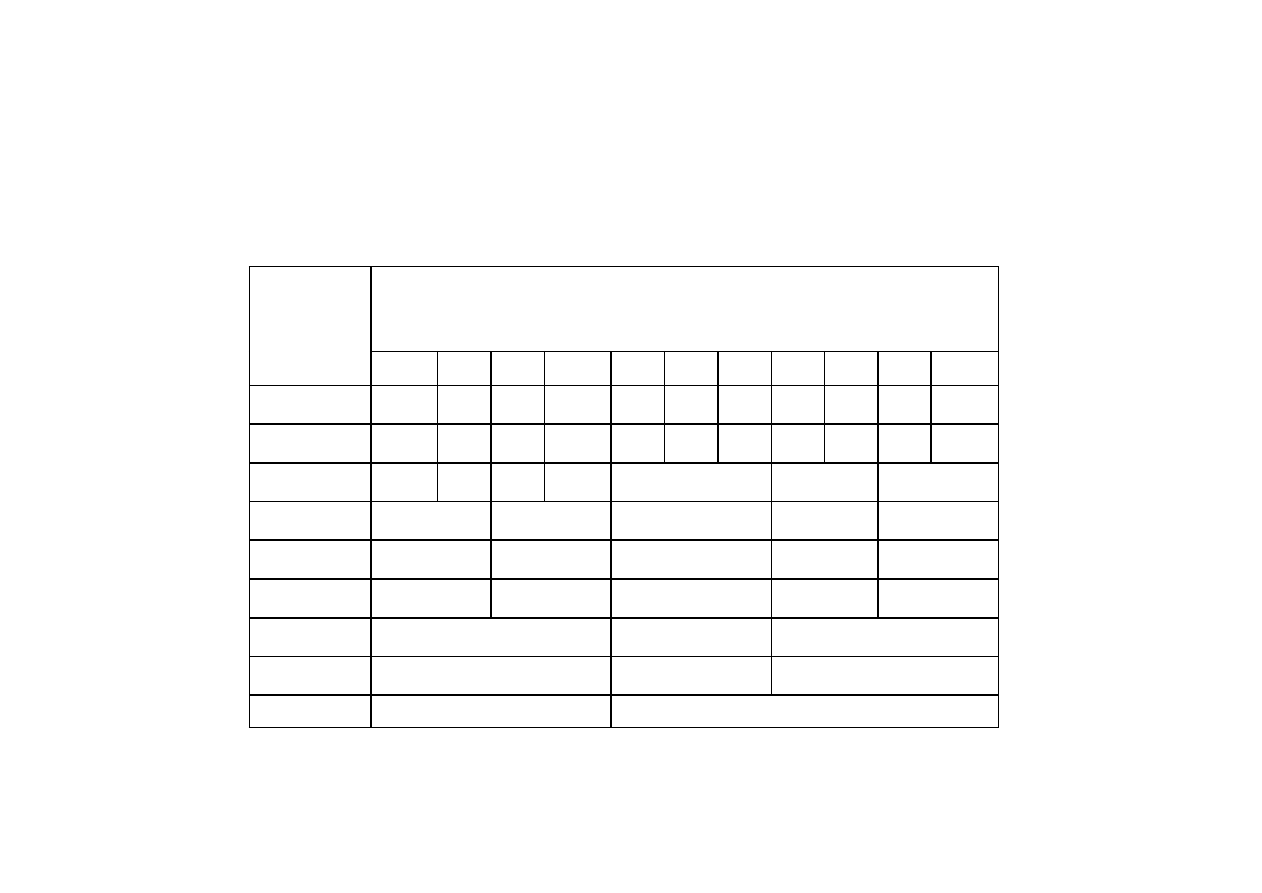
Najmniejsza odległość widoczności na zatrzymanie w
zależności od prędkości
Prędkość
miarodajna
[km/h]
Najmniejsza odległość widoczności na zatrzymanie
L
WH
[m] na pochyleniu [%]
-10
-8
-6
-4
-2
0
2
4
6
8
10
120
420
380 350
320
300 280 260 250 240 230
210
110
330
300 280
260
240 230 220 210 200 190
180
100
250
230 220
200
190
170
150
90
210
180
160
140
130
80
160
140
120
110
100
70
110
100
90
85
80
60
80
70
60
50
55
50
45
40
40
35
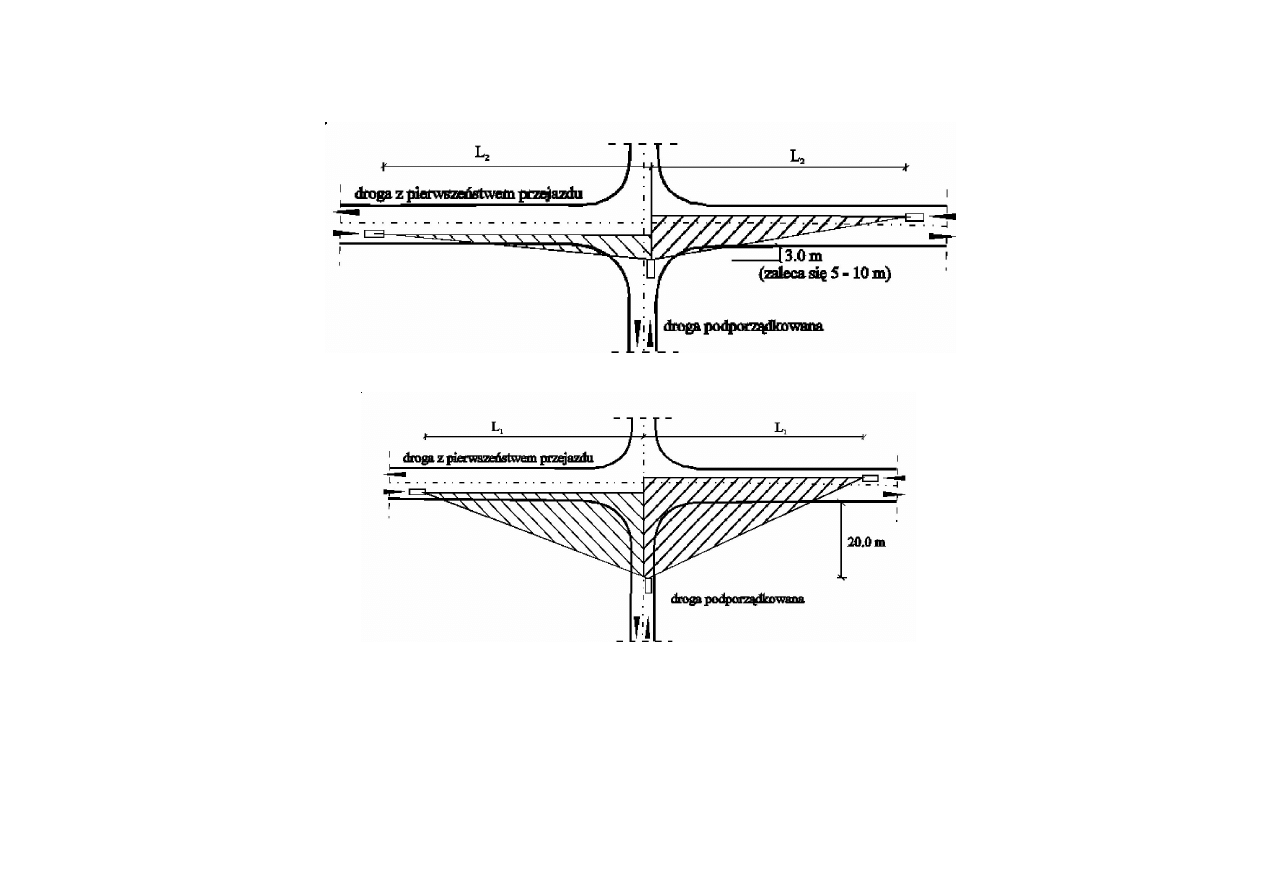
Przykłady oznaczania pól widoczności
- dojazd do drogi z pierwszeństwem
- ruszania z drogi podporządkowanej
Widoczność pionowa
W celu zachowania widoczności potrzebnej do zatrzymania i
wyprzedzania pojazdów podczas przejazdu przez załom niwelety, dla
którego suma algebraiczna pochyleń niwelety jest równa lub większa od
1%, załom zaokrągla się pionowym łukiem wypukłym o promieniu
określonym następującym wyrażeniem
h
L
R
2
2
L - odległość widoczności koniecznej do zatrzymania lub wyprzedzania [m],
h - wysokość wzniesienia oka kierowcy nad nawierzchnię drogi (przyjmuje się 1,20 m).
Dla dużych prędkości łuki pionowe stosowane są już dla algebraicznej sumy
pochyleń większej od 0,5%. Projektując łuk należy spełnić warunek
minimalnej odległości środka łuku od punktu załomu niwelety, równej 40 m.
Promienie pionowych łuków wklęsłych projektuje się z uwagi na potrzebę
zachowania widoczności w światłach samochodu w przypadku zatrzymania
pojazdu w nocy
Prędkość projektowa
Promień łuku
wypukłego [m]
100
80
70
60
50
40
30
Najmniejszy
10 000
4 500
3 000
2 500
1 500
800
300
Zalecany
13 000
10 000
8 000
6 000
4 000
2 500
600
Promień łuku
wklęsłego [m]
Najmniejszy
3 000
2 000
1 800
1 500
1 000
800
200
Zalecany
5 000
3 000
2 500
2 000
1 500
1 000
500

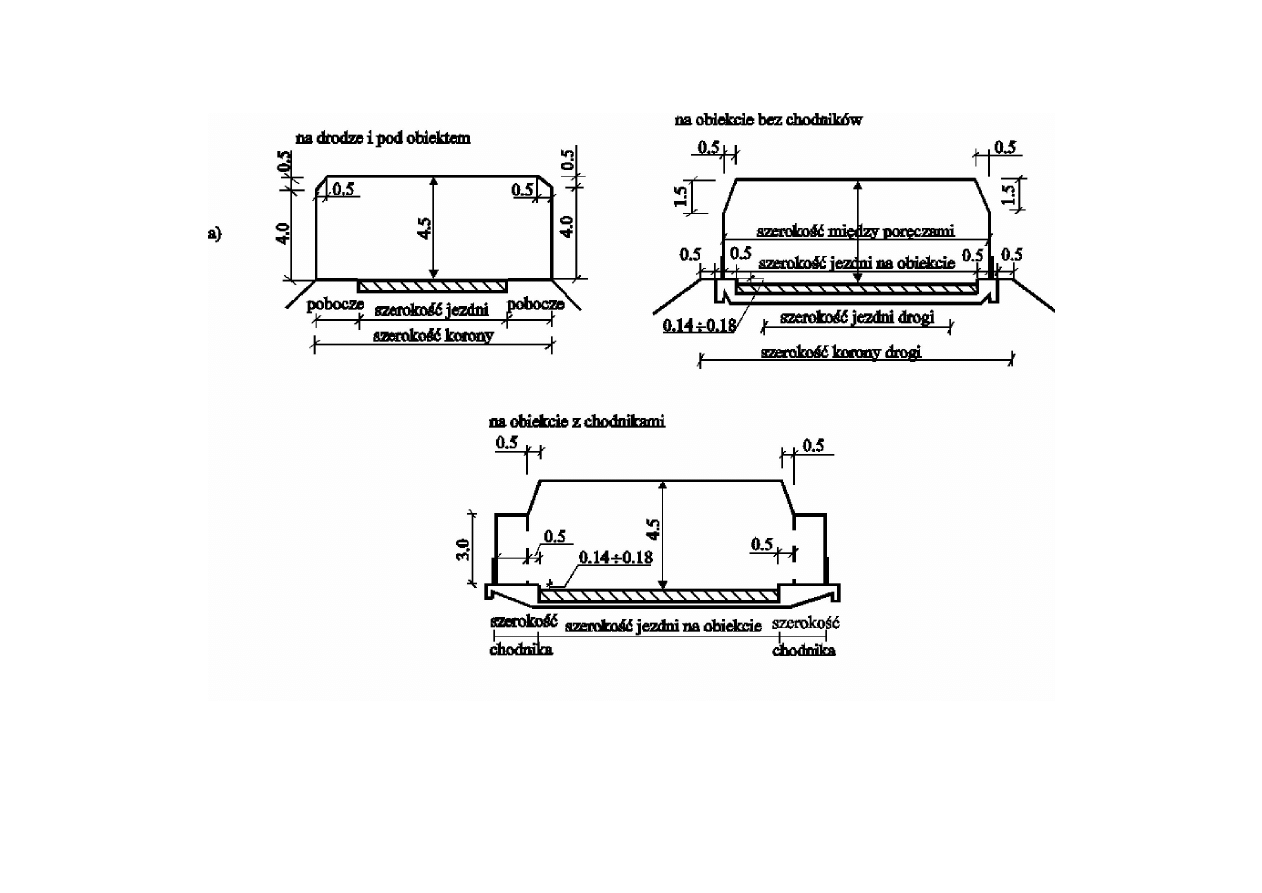
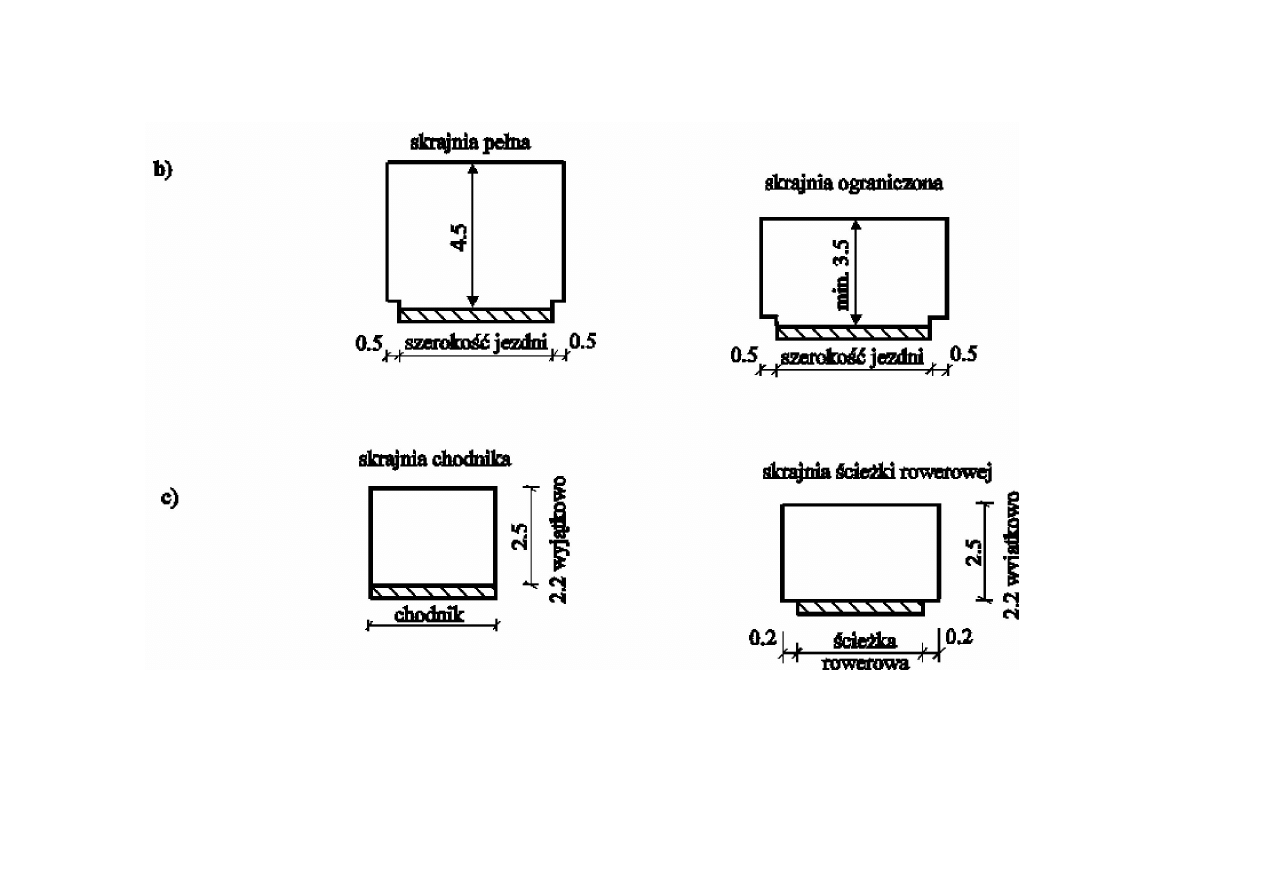
Elementy przekroju poprzecznego drogi
Z drogą , prócz pasa terenu związana jest przestrzeń
przeznaczona dla użytkowników dróg, w której nie mogą
znajdować się żadne elementy budowli, słupy oświetleniowe,
drzewa itp. Jest to skrajnia drogowa.

Szerokość drogi
Przekrój poprzeczny dróg i ulic zawiera takie elementy jak: jezdnie,
pasy awaryjnego postoju, opaski wewnętrzne i zewnętrzne, pobocza,
pasy postojów itp.
Zasadniczym elementem jest jezdnia, której szerokość przyjmuje się
przede wszystkim w zależności od prędkości projektowej i natężenia
ruchu.
Uwzględniać należy również rodzaj terenu (zabudowany, otwarty) i
jego ukształtowanie, a więc także skarpy wykopów i nasypów oraz
rowy boczne występujące w przekroju poprzecznym drogi.
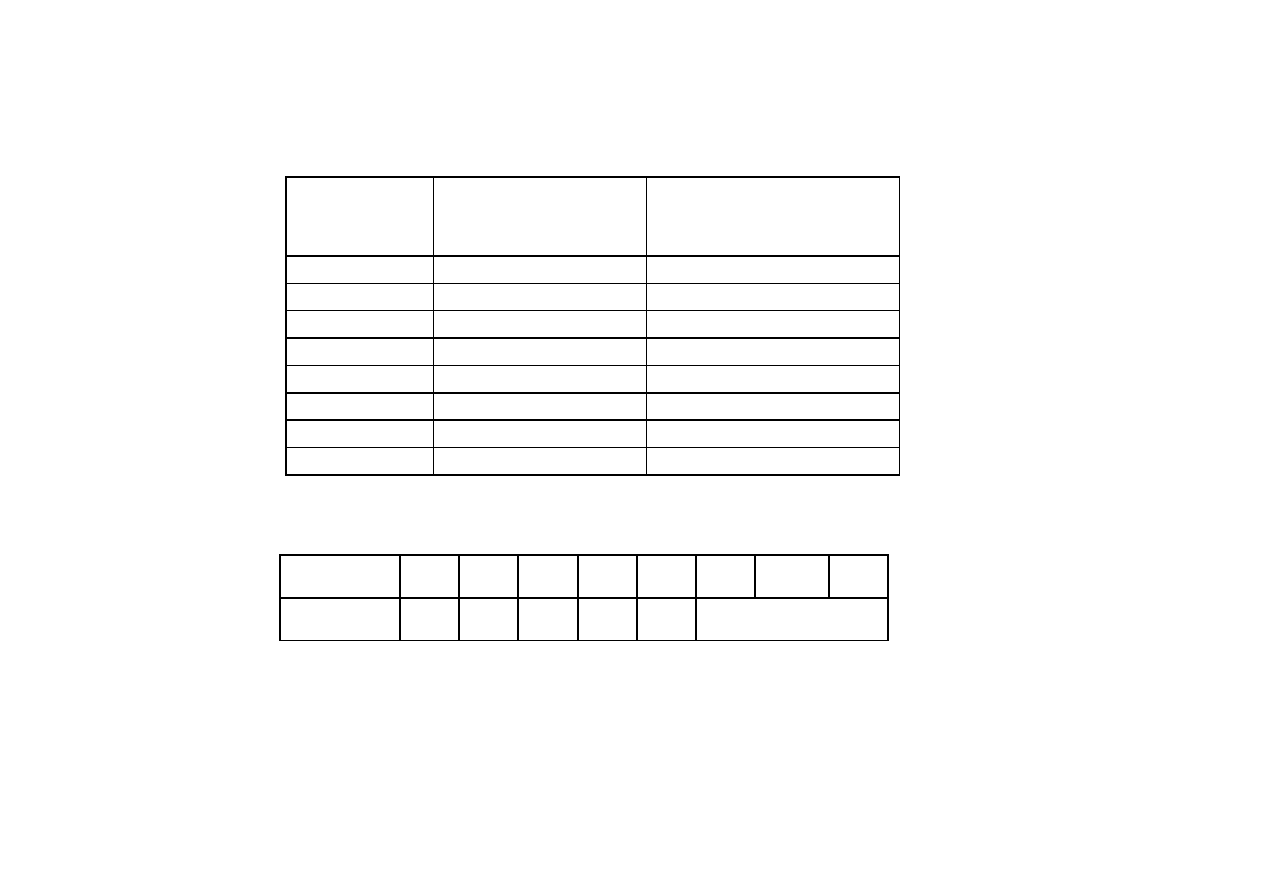
Szerokości jezdni przyjmowane w zależności od klasy drogi
A
3,75 (3,50)
*)
S
3,50
S,GP
3,50
GP
3,00
Z
2,75
L
2,50
Klasa drogi
D
1,75
*) - Dla trzypasmowej jezdni autostrady

Pochylenia poprzeczne drogi
Pochylenia jednostronne stosuje się na jezdniach jednopasmowych, na
łukach wymagających projektowania przechyłki oraz na ulicach i drogach
dwujezdniowych.
Pochylenia dwustronne stosuje się na jezdniach jednopasmowych oraz
ulicach dwujezdniowych z trzema pasami ruchu w każdym kierunku.
Jezdnię o przekroju daszkowym wyokrągla się łukiem na 1/3 szerokości
jezdni.
Wartość pochylenia poprzecznego jezdni na prostej zależy od rodzaju
nawierzchni, a także od pochyleń niwelety. Dla jezdni o nawierzchni
ulepszonej – 3%, a dla jezdni o nawierzchni gruntowej 4%. Na łuku
pochylenie to uzależnione jest od wartości promienia łuku oraz prędkości
projektowej V
p
.

Elementy przekroju podłużnego drogi
Podstawowym elementem przekroju podłużnego drogi jest niweleta.
Niweleta składa się z odcinków o stałym pochyleniu odwzorowujących
wysokościowo oś drogi.
Zalecane jest projektowanie niwelety drogi jednojezdniowej wzdłuż osi
jezdni, a drogi dwujezdniowej - wzdłuż krawędzi jezdni przy pasie
dzielącym albo wzdłuż osi jezdni.
Załamania niwelety w punktach przecięcia jej kolejnych odcinków
wyokrągla się łukami pionowymi o odpowiednich promieniach.
Projektując niweletę należy dostosowywać jej przebieg do ukształtowania
terenu.
Miejscami zerowymi niwelety są punkty przecięcia się linii terenu z
niweletą drogi.
W celu odprowadzenia wody z korpusu drogi krawędź korony drogi
powinna być wyniesiona ponad poziom wód gruntowych, co najmniej o 1
m (zalecane 1,5 m). W miejscach narażonych na zaśnieżanie niweletę
należy projektować przynajmniej 0,5 m ponad terenem.

Pochylenia niwelety drogi nie powinny być mniejsze niż 0,3% (na mostach
0,5%, na rampie drogowej 0,7%) ze względu na odwodnienie. Projektowanie
odcinków dróg w poziomie należy przewidywać wyjątkowo.
Największe pochylenia, jakie można stosować na krótkich odcinkach
określają warunki pracy silników samochodowych przy pokonywaniu
wzniesień
1)
. W projektowaniu największe dopuszczalne pochylenie podłużne
niwelety i
n
określa się w zależności od prędkości projektowej V
p
.
1) Na przykład, maksymalne możliwe pochylenie drogi dla samochodu Fiat
126p wynoszą przy jeździe na I biegu 26,1%, a dla samochodu Cinquecento
(704 cm3) 26% [ ].
Prędkość V
p
[km/h]
Największe
pochylenie podłużne
i
nmax
[%]
Zalecana długość odcinka
o pochyleniu 0,75
i
nmax
[m]
120
4
2000
100
5
2000
80
6
1000
70
7
800
60
8
700
50
9
500
40
10
200
30
12
100
V
p
[km/h] 120 100
80
70
60
50
40
30
L [m]
600 500 400 300 250
Nie określa się
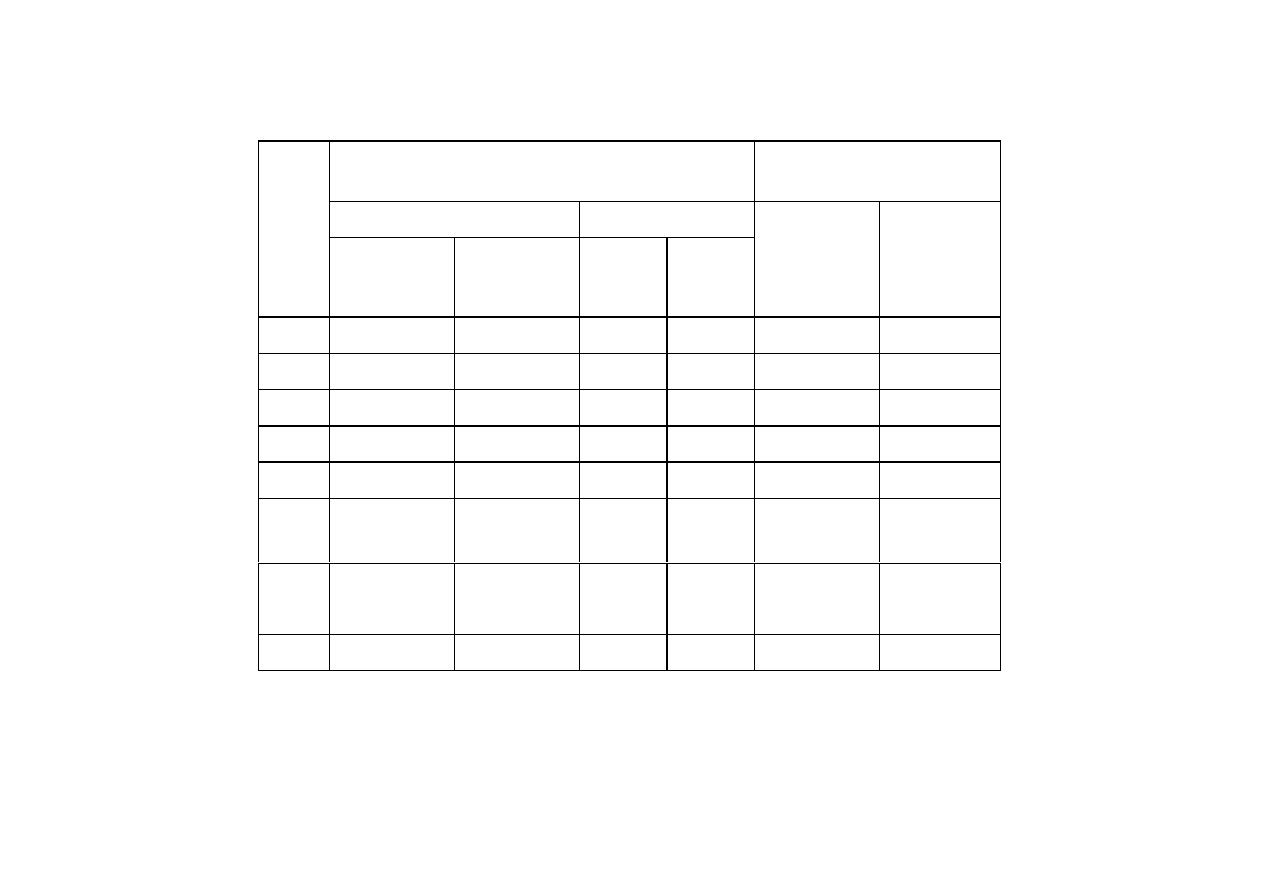
Promień łuku wypukłego R [m]
Promień łuku wklęsłego R
[m]
Jedna jezdnia
Dwie jezdnie
V
p
[km/h] najmniejszy
zalecany
najmniejszy
najm-
niejszy
zalecany
najm-
niejszy
najmniejszy
zalecany
najmniejszy
120
-
-
16000
12000
8000
4500
100
13000
10000
10000
7000
5000
3000
80
10000
4500
4500
3500
3000
2000
70
8000
3000
3000
2200
2500
1800
60
6000
2500
2500
1500
2000
1500
50
4000
(2500)
1500
(1300)
-
-
1500
(1200)
1000
(400)
40
2500
(1200)
800
(600)
-
-
1000
(800)
800
(300)
30
600
300
-
-
500
200
W nawiasach podano wartości R odnoszące się do dróg kategorii L i D.

Dopuszczalne pochylenie drogi oraz opory ruchu
Powierzchnia jezdni stanowi podparcie dla pojazdu i
współdziała w przenoszeniu sił stycznych.
Powierzchnia A
s
przekazywania przez koło nacisku p na
powierzchnię drogową ma kształt eliptyczny, który dla
uproszczenia przelicza się na powierzchnię koła o średnicy d.
Na rys przedstawiono schemat koła w stanie spoczynku,
wywierającego nacisk Q
s
.
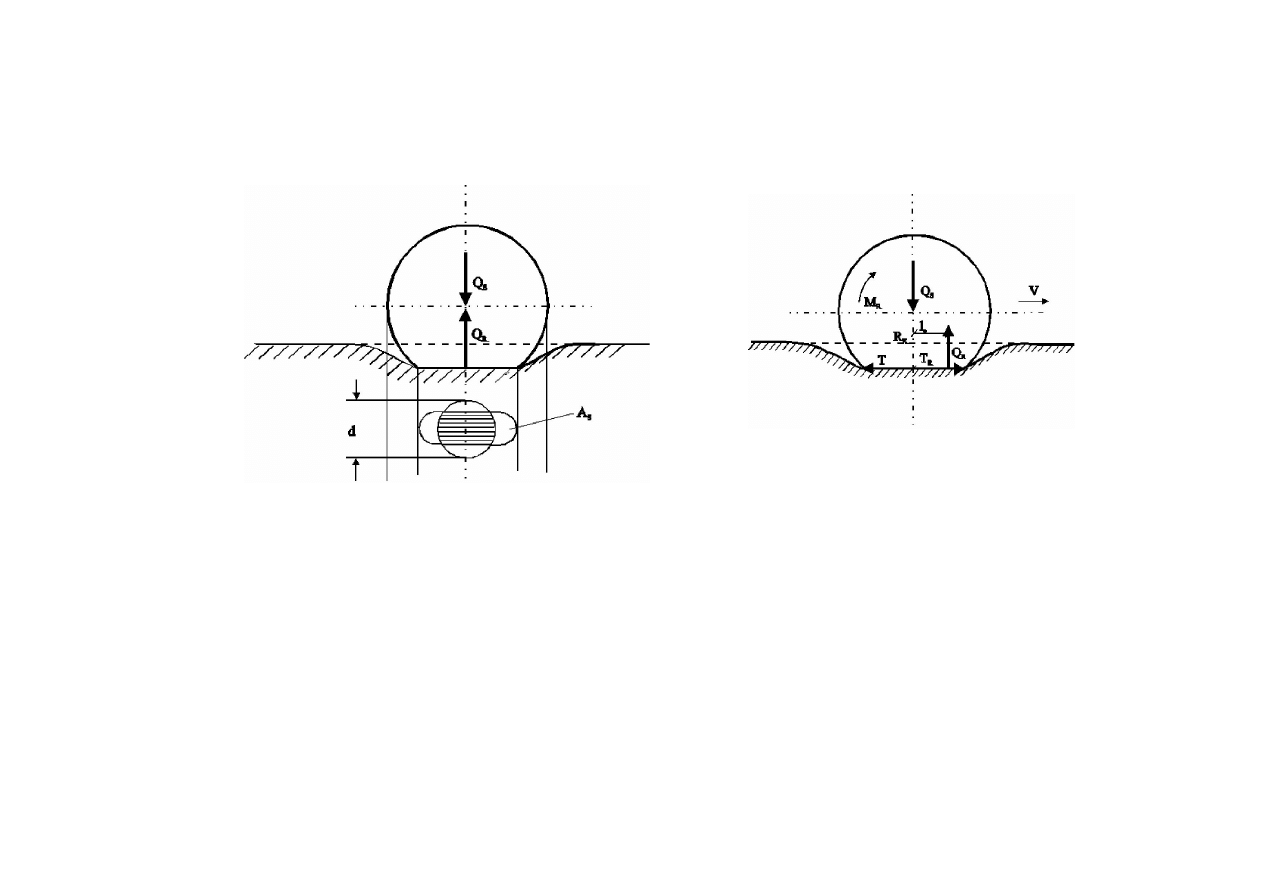

W przypadku współczesnych pojazdów średnica d wynosi 180÷350
mm, a wartość ciśnienia p od 0,3 do 0,85 MPa.
Powierzchnia jezdni powinna zapewniać
oponom kół pojazdu
wystarczająco duże tarcie, nawet w zawilgoconym stanie. Dzięki
szorstkości nawierzchni powstają
siły tarcia między kołem a
nawierzchnią. Zjawisko to nosi nazwę przyczepności. O charakterze
przyczepności decyduje obok cech nawierzchni również przyleganie
opony do powierzchni jezdni (adhezja) oraz odkształcenie opony
(histereza gumy).
W przypadku oddzielenia przez warstwę
wody (np. podczas
intensywnych opadów) powierzchni styku opony od nawierzchni
(zjawisko akwaplanacji) przyczepność maleje i może dojść do całkowitej
utraty tarcia.
Samochód porusza się, gdy na styku opony z nawierzchnią powstaje
siła przyczepności. Od wartości tej siły zależy wykorzystanie siły
napędowej na obwodzie koła napędzającego.

Siła T jest poziomą siłą przyczepności zależną od pionowego obciążenia
koła. Jedną z wielkości charakteryzujących warunki współpracy koła
pojazdu z nawierzchnią
drogową
jest współczynnik przyczepności
podłużnej będący stosunkiem największej wartości siły tarcia T
max
występującej w styku koła z nawierzchnią do pionowego obciążenia koła
Q
s
. Jest on miarą zdolności nawierzchni do wytwarzania sił tarcia
warunkujących ruch pojazdu.
Wartość współczynnika zależy od warunków współpracy koła
z nawierzchnią (prędkości jazdy, warunków atmosferycznych i stanu
technicznego nawierzchni), cech pojazdu (średnicy kół, rodzaju bieżnika
i
stopnia jego zużycia, ciśnienia w oponach itp.) oraz cech
konstrukcyjnych nawierzchni drogowej. W największym stopniu o
wartości współczynnika przyczepności decyduje prędkość jazdy i stan
nawierzchni. Również istotna jest powierzchnia styku bieżnika z
nawierzchnią. Opony z wyższym ciśnieniem (0,4÷0,8 MPa) wykazują
gorszą przyczepność.
s
max
Q
T
Rodzaj i stan
nawierzchni
sucha
mokra
czysta
zabrudzo
na
Tłuczniowa
Bitumiczna
Betonowa
Drobny bruk
0,70
0,55
0,65
0,55
0,5
0,3
0,5
0,3
0,4
0,2
0,3
0,2
Wartości współczynników przyczepności podłużnej
xR
Dopuszczalne wartości współczynnika przyczepności poprzecznej
yR
przy różnych
prędkościach jazdy
Prędkość jazdy
[km/h]
20
40
60
70
80
100
yR
0,34
0,27
0,16
0,12
0,10
0,09

Podstawowy warunek ruchu oraz opory ruchu
Poruszanie się pojazdu jest możliwe w przypadku, gdy siła napędowa P
n
będzie większa od sumy oporów drogowych oraz gdy siła przyczepności kół
prowadzących będzie większa lub co najmniej równa sile napędowej.
Zasadniczy warunek ruchu można zapisać następująco:
r
P
G
T
n
k
max
gdzie:
G
k
- ciężar pojazdu przypadający na koła napędzane,
- współczynnik przyczepności,
r - suma oporów ruchu (sił zewnętrznych działających przeciwnie do kierunku ruchu).
Najlepsze warunki poruszania się pojazdu wystąpią w
przypadku nawierzchni o dużej przyczepności i możliwie
najmniejszym oporze toczenia. A więc im większa jest siła
przyczepności, tym lepiej będzie wykorzystana moc silnika.
Siłę napędową określa następujące wyrażenie:
gdzie:
N
s
- moc silnika [kW],
S
m
- współczynnik sprawności mechanicznej (0,800,88),
V- prędkość jazdy [km/h].
V
S
N
3600
P
m
s
n
Zasadniczymi oporami ruchu są: opór podstawowy (opór toczenia) i opór powietrza.
Opór toczenia zależy głównie od obciążenia kół i wynosi:
gdzie:
t
- współczynnik oporu toczenia.
Współczynnik ten zależy w znacznym stopniu od rodzaju i stanu nawierzchni oraz ogumienia kół
(dla nawierzchni betonowej i asfaltowej wynosi 0,01 ÷ 0,20, dla nawierzchni tłuczniowych 0,023 ÷
0,3),
G
s
- ciężar pojazdu [N].
Opór powietrza jest to całkowity opór powietrza skierowany w kierunku przeciwnym do kierunku
ruchu samochodu, Zależy od oporu ciśnienia (wszystkich sił normalnych działających na
powierzchnię pojazdu) oraz oporu wewnętrznego wynikającego z przepływu powietrza przez
urządzenia wentylacyjne i otwarte okna pojazdu.
Ogólny wzór na opór powietrza jest następujący:
gdzie:
- gęstość powietrza 1,226 kg/m
3
(w temp. 15C),
K - współczynnik oporu powietrza (samochody o tradycyjnym kształcie 0,350,5, samochody
ciężarowe - 0,85, autobusy - 0,6),
F - pole powierzchni czołowej pojazdu (małe samochody osobowe 1,5 1,8; średnie i duże
samochody osobowe 1,83,0, samochody ciężarowe 4,07,0, autobusy 6,0÷7,50) [m
2
],
V
sum
- prędkość względem wiatru.
s
t
t
G
r
2
V
F
K
r
2
sum
p

Opór wzniesienia jest składową siły ciążenia, równoległa do jezdni i skierowaną przeciwnie
do kierunku ruchu
Przyjmując sin() tg(
p
) otrzymamy:
gdzie:
G
s
- ciężar samochodu [N],
p
- kąt podłużnego pochylenia drogi,
i
x
- pochylenie niwelety [%] (jazda na wzniesieniu „+”, jazda na spadku „-”).
Opór bezwładności pojawia się przy zmianie prędkości ruchu i związanej z tą zmianą sile
bezwładności przeciwdziałającej ruchowi postępowemu, Opór ten można obliczyć stosując
następujące wyrażenie:
gdzie:
w
- współczynnik mas wirujących,
a
s
- przyspieszenie („+”) lub opóźnienie („-”).
s
x
p
s
w
G
i
1
,
0
tg
G
r
g
a
G
r
s
w
s
b

Opór na łuku pojawia się podczas jazdy samochodu po krzywej (łuku, krzywej przejściowej), Opór ten
zwiększa się wraz ze wzrostem prędkości jazdy, zwłaszcza w łuku o małym promieniu
gdzie:
s
- współczynnik oporu skrętu,
V - prędkość [km/h],
R - promień łuku [m],
G
s
- ciężar samochodu [N].
Opór przyczepy jest siłą oddziałującą na hak samochodu ciągnącego przyczepę. Wartość tego oporu
można obliczyć posługując się następującym wyrażeniem:
gdzie:
G
pp
- ciężar przyczepy [N]
pp
- współczynnik uwzględniający momenty obrotowe kół przyczepy.W zależności od prędkości
projektowej V
p
, określa się największe dopuszczalne pochylenia podłużne i
n
niwelety .
s
2
4
6
s
s
G
R
V
10
12
G
r
s
pp
pp
pp
x
2
pp
t
pp
a
g
G
G
i
01
,
0
V
F
K
15
,
0
G
r

Obliczanie i rozdział mas ziemnych
Roboty ziemne występują masowo przy budowie dróg
samochodowych, ulic miejskich, linii kolejowych, wałów i
zapór ziemnych. Ze względu na położenie wykonywanych
robót ziemnych w stosunku do naturalnej powierzchni
terenu rozróżnia się przekopy (niekiedy określane mianem
wykopów), związane z wydobywaniem gruntu oraz nasypy
powstające w wyniku nanoszenia i układania gruntu ponad
naturalną powierzchnię terenu. Zarówno przekopy, jak i
nasypy mają określone regularne formy geometryczne,
zależne od przeznaczenia
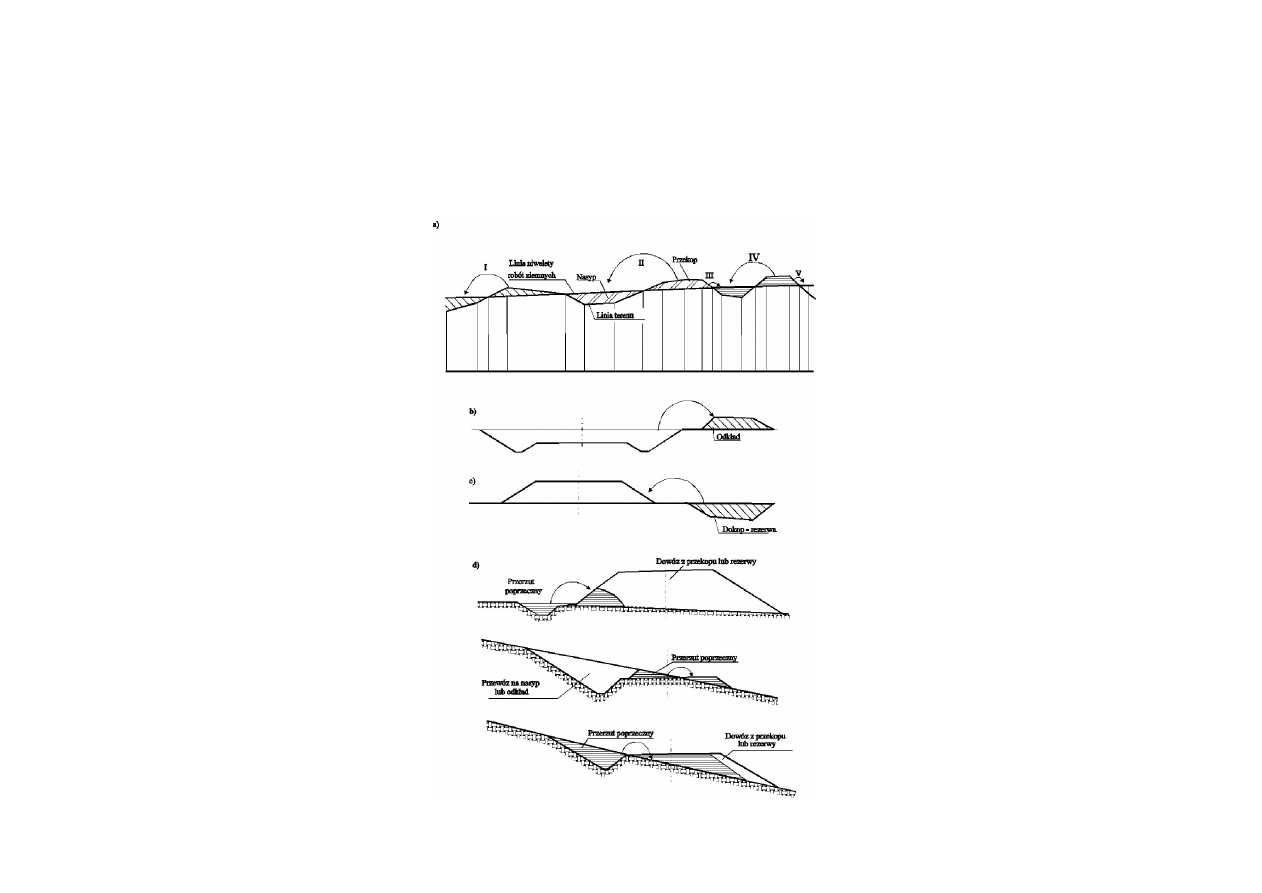
W budownictwie drogowym, w wykopach, niezależnie od ich głębokości oraz w nasypach
o wysokości do 6 m projektuje się zasadniczo pochylenie 1:1,5.
W przekroju poprzecznym trasy określa się kształt torowiska ziemnego, zaznaczając
powierzchnie przekopów i nasypów
Objętość przekopów oraz objętość nasypów obliczana jest oddzielnie.
W przypadku liniowych robót ziemnych ich objętość oblicza się na podstawie profilu
podłużnego trasy określającego:
–
punkty zerowe niwelety,
–
odległości między przekrojami poprzecznymi,
–
różnice wysokości pomiędzy rzędnymi terenu, a rzędnymi niwelety roboczej robót
ziemnych (wysokości nasypów i głębokości przekopów).
Objętość danego nasypu lub wykopu jest sumą objętości brył ziemi pomiędzy sąsiednimi
przekopami.
Przy określaniu objętości powierzchniowych robót ziemnych korzysta się z
następujących sposobów obliczeń:
–
przekrojów poprzecznych,
–
warstwic,
–
siatki kwadratów lub trójkątów.

Sposób przekrojów poprzecznych polega na narysowaniu równolegle do
przyjętego kierunku, szeregu przekrojów poprzecznych poprzez całą
szerokość obszaru projektowanych robót ziemnych, naniesieniu na tych
przekrojach projektowanej linii wysokościowej robót ziemnych, obliczeniu
powierzchni tych przekrojów (osobno dla nasypów i dla przekopów) i na
tej podstawie obliczeniu objętości robót ziemnych między każdą parą
przekrojów poprzecznych (jako iloczynu średniej powierzchni przekroju i
odległości między przekrojami). Sposób ten jest przybliżony, ze względu
na trudności uwzględnienia wszystkich zmian powierzchni terenu między
sąsiednimi przekrojami.
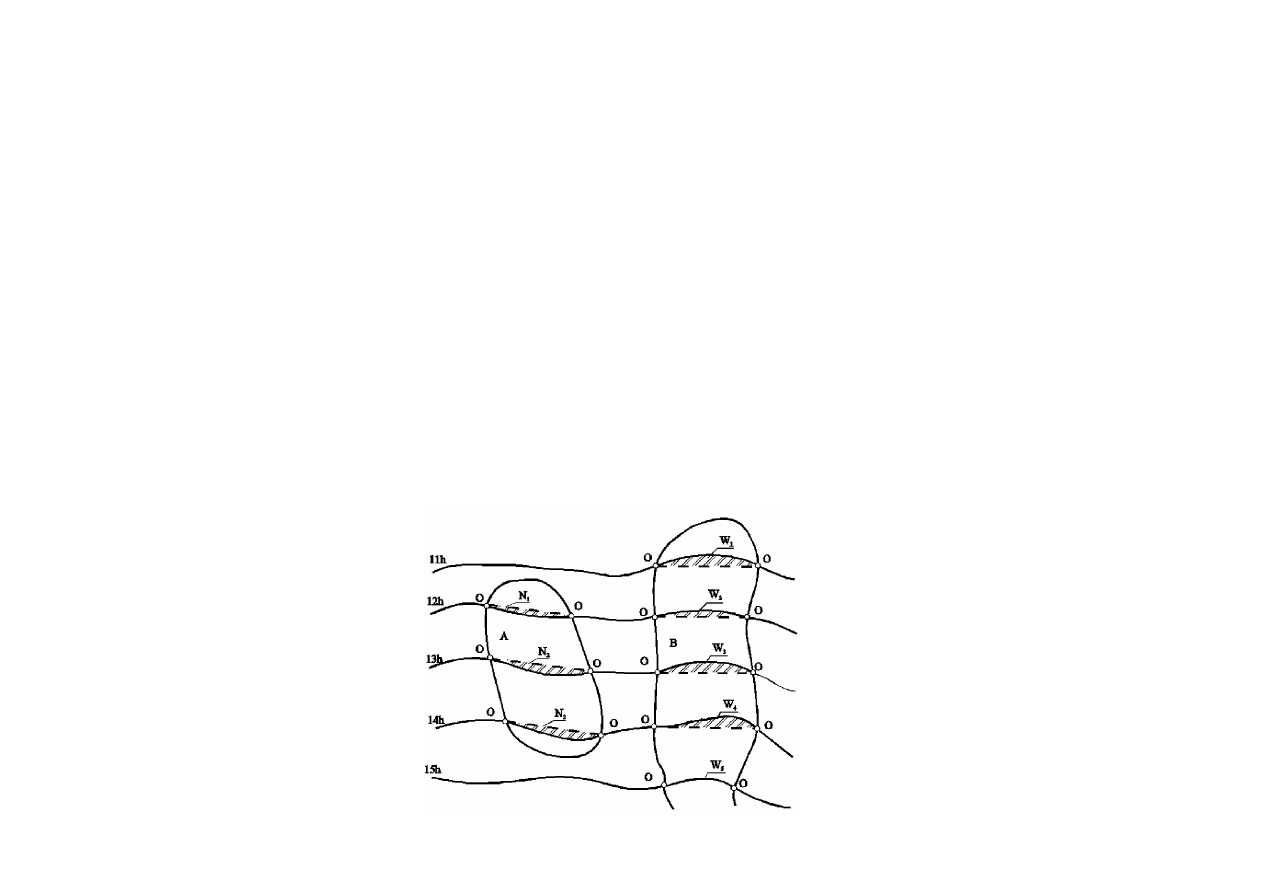
Do obliczenia objętości robót ziemnych drugim sposobem korzysta się z układu
warstwic istniejącego terenu oraz układu warstwic projektowanych
Objętość nasypów określa się następująco:
a przekopów
W wyrażeniach tych „h” jest skokiem warstwic, a N
1
, N
2
... oraz W
1
, W
2
... oznaczają
powierzchnie przekrojów poprzecznych nasypów i przekopów na poziomie
poszczególnych, kolejnych warstw.
Sposób ten jest stosowany do oceny zakresu robót ziemnych związanych
n
2
1
n
N
N
N
h
V
n
2
1
p
W
W
W
h
V
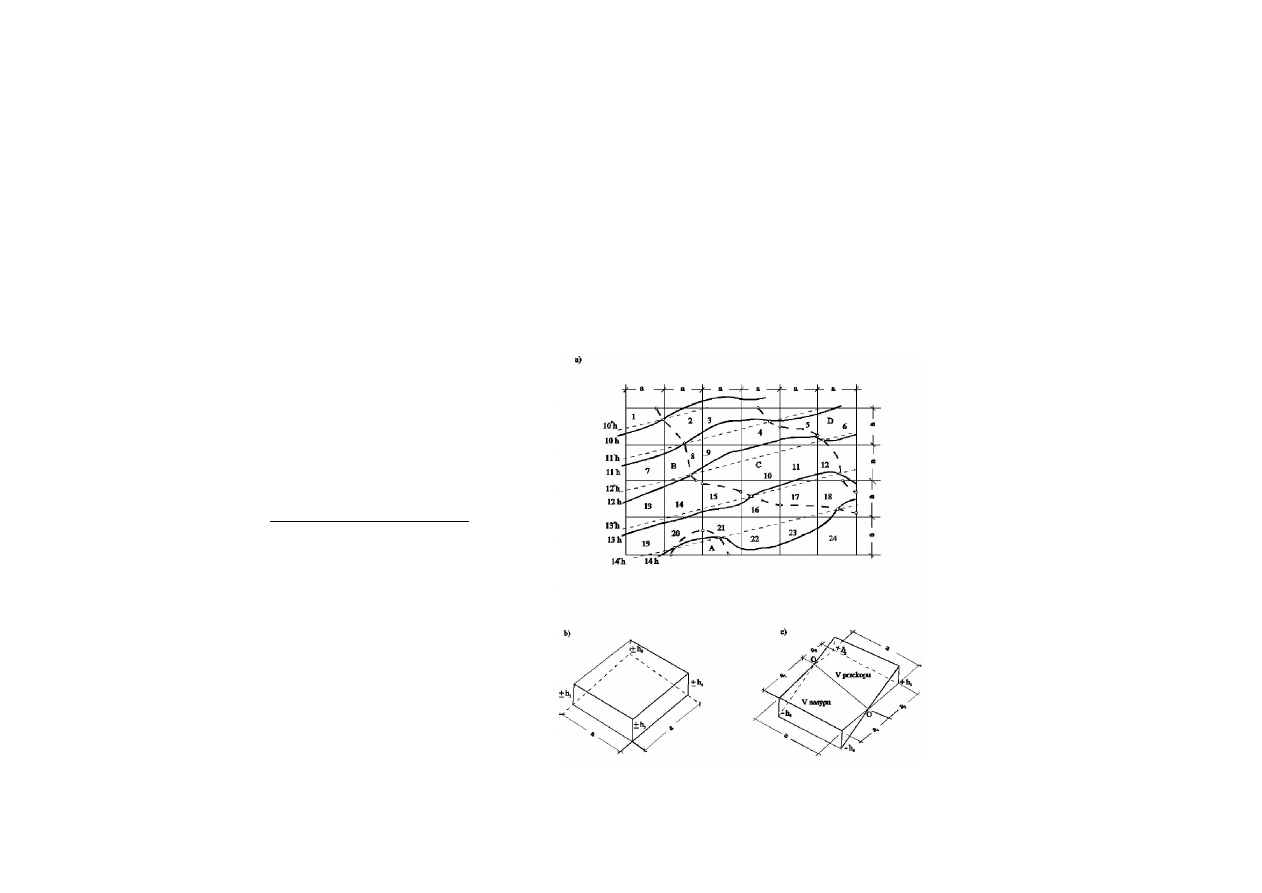
W sposobie siatki kwadratów lub trójkątów cały obszar, na którym mają być
policzone roboty ziemne pokrywa się siatką utworzoną przez dwa, wzajemnie
prostopadłe, układy linii równoległych, prowadzonych w jednakowych, ustalonych dla
danego terenu odstępach (w granicach 10÷40 m). Wzdłuż wszystkich linii siatki
wykonuje się pomiary wysokościowe, określając rzędne terenu dla wierzchołków
siatki. Następnie opracowuje się szczegółowy plan warstwicowy danego terenu, ustala
kształt projektowanej powierzchni terenu za pomocą drugiego układu warstwic
projektowanych. Zazwyczaj od rzędnych terenu odejmuje się rzędne projektowane.
2
4
3
2
1
a
4
h
h
h
h
V
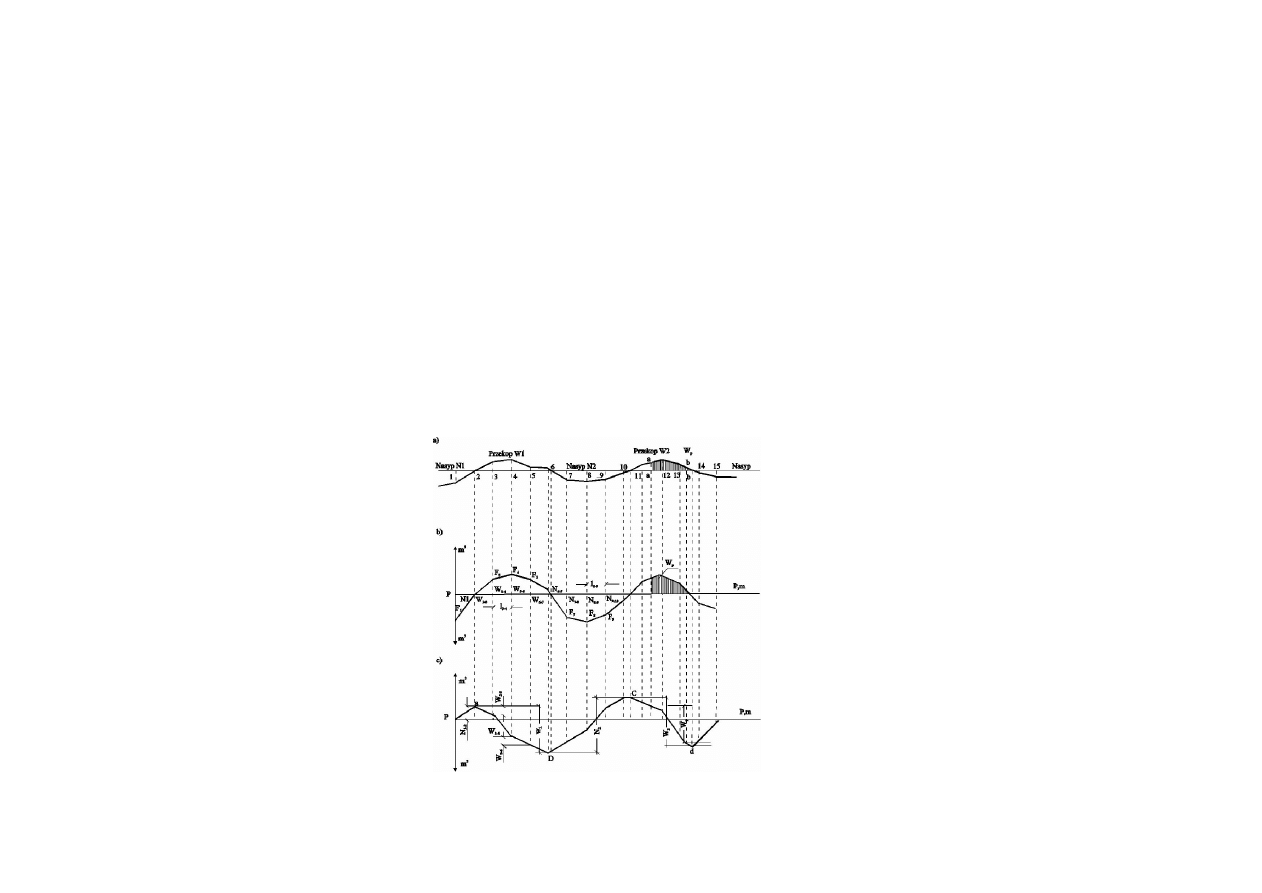
Koszty transportu mas ziemnych stanowią przeciętnie 60 ÷ 70% ogólnych kosztów robót
ziemnych, dlatego też właściwe zaprojektowanie ich przerzutu jest bardzo istotne.
Grunt wydobywany z przekopów może być przewożony na nasypy lub odwożony na
odkłady. Grunt potrzebny do wykonania nasypów może być również dowieziony z
odkopów (rezerw materiałowych)
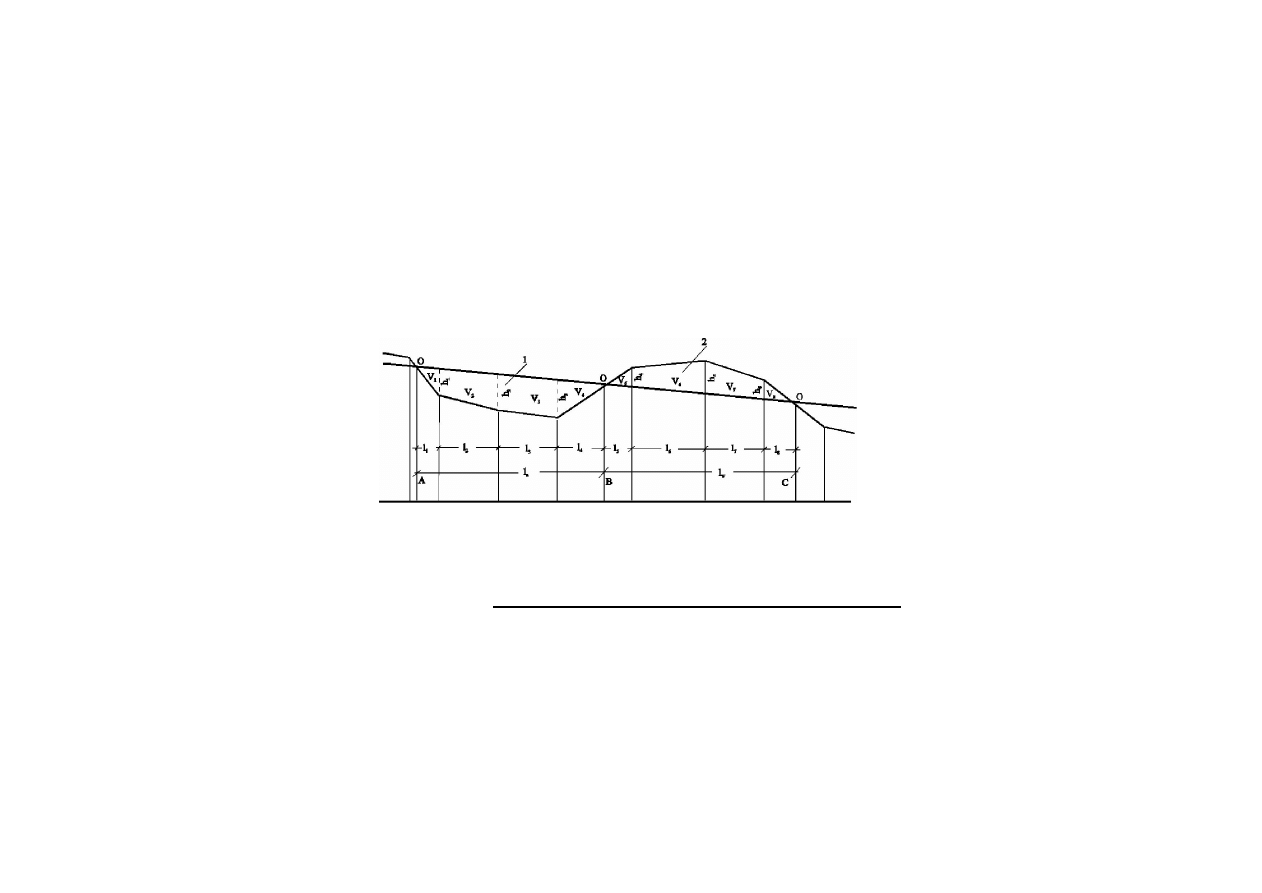
W celu racjonalnego rozdziału mas ziemnych i ich przewozu stosowana jest wykreślna
metoda rozdziału (Brücknera) umożliwiająca wykreślne przedstawienie objętości
wykopów i nasypów projektowanych robót ziemnych. W tym celu opracowuje się
dwa wykresy

Koordynacja elementów geometrycznych drogi
Droga wraz z otaczającym środowiskiem tworzy kompozycję przestrzenną
ocenianą zarówno przez kierowców, jak i innych użytkowników drogi.
W celu skoordynowania elementów geometrycznych drogi należy przestrzegać
następujących zaleceń:
–
stosować tym większe wartości promieni łuków poziomych i pionowych,
im większa jest odległość, z której są one postrzegane,
–
dążyć do tego, aby możliwie najwięcej odcinków trasy równomiernie
rozmieszczonych wzdłuż drogi dawało możliwość wyprzedzania. W tym celu
należy w miarę możności projektować nakładanie się na siebie tych
odcinków, gdzie wyprzedzanie nie jest możliwe tzn. odcinków położonych w
krzywych poziomych (łukach i krzywych oraz w profilu z łukami
wypukłymi).

Nakładanie to należy projektować tak, aby:
wzajemne przesunięcie wierzchołków załamań trasy w
poziomie i w profilu nie było większe od 1/4 długości odcinka
położonego w krzywej poziomej,
długość odcinka położonego w łuku poziomym była większa
o ok. 10% od długości łuku wypukłego zaokrąglającego załom
niwelety,
zmiana układu trasy od początku krzywej poziomej do
początku najbliższego łuku wypukłego była większa od 3.
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron