Katedra Mechaniki Budowli
Wykład
Mechanika Budowli 1 [C16]
Politechnika Gdańska
2006
Marek Krzysztof Jasina
http://www.okno.pg.gda.pl –
43
–
jasina@pg.gda.pl
9.
Wyznaczanie przemieszczeń z zasady prac wirtualnych
dla odkształcalnych układów prętowych
- obciążenia pozastatyczne
9.1. Przemieszczenia wywołane przemieszczeniem podpór
W układach statycznie niewyznaczalnych przemieszczeniom podpór mogą
towarzyszyć powstałe w ich wyniku wewnętrzne siły przekrojowe
,
∆
N
∆
M
,
oraz siły
w więzach sprężystych (wewnętrznych lub zewnętrznych).
∆
T
∆
S
Załóżmy, że w układzie, co najmniej jedna podpora uległa przemieszczeniu,
przy czym pewne dowolne przemieszczenie podpory oznaczymy przez
.
∆
r
Poszukiwane jest uogólnione przemieszczenie
δ
i
w miejscu
, o określonym
kierunku i zwrocie. Załóżmy, w tym miejscu, pewne jednostkowe obciążenie
wirtualne
( )
i
1
i
, które związane jest z przemieszczeniem
δ
i
związkiem pracy
(tworzy parę sprzężoną).
W wyniku działania wirtualnego obciążenia 1
i
w więzach układu powstają
reakcje
ri
R
, siły w więzach
i
S
, oraz wewnętrzne siły przekrojowe
i
N
,
i
M
,
i
T
.
Wykorzystując 2) postać zasady prac wirtualnych można zapisać następujące
równanie pozwalające wyznaczyć poszukiwane przemieszczenie
δ
∆
i
1 δ
κ
∆
∆
∆
∆
∆
=
+
+
+
−
∑
∑
∫
∫
∫
i
i
i
i
i
i
ri
r
s
r
s
l
l
l
N N
M M
T T
S S
ds
ds
ds
R
EA
EI
GA
k
∆ . (9.1)
Jako, że w układach statycznie wyznaczalnych przemieszczenia podpór nie
wywołują sił wewnętrznych i sił w więziach czyli siły przekrojowe
,
,
oraz
, wzór (9.1) redukuje się do postaci
0
∆
=
N
0
∆
=
M
0
∆
=
T
0
∆
=
S
δ
∆
= −
∆
∑
i
r
r
R
i
r
. (9.2)
W przypadku układów kratowych, w których występują jedynie (stałe w prę-
tach) siły normalne zależność (9.1) przyjmuje postać
(
)
δ
∆
∆
∆
=
+
−
∆
∑
∑
∑
ki
k
i
i
k
ri
r
k
s
r
k
s
N N
S S
l
R
EA
k
, (9.3)
Katedra Mechaniki Budowli
Wykład
Mechanika Budowli 1 [C16]
Politechnika Gdańska
2006
Marek Krzysztof Jasina
http://www.okno.pg.gda.pl –
44
–
jasina@pg.gda.pl
a wzór dla układów statycznie wyznaczalnych pozostaje niezmieniony (zob.
(9.2)).
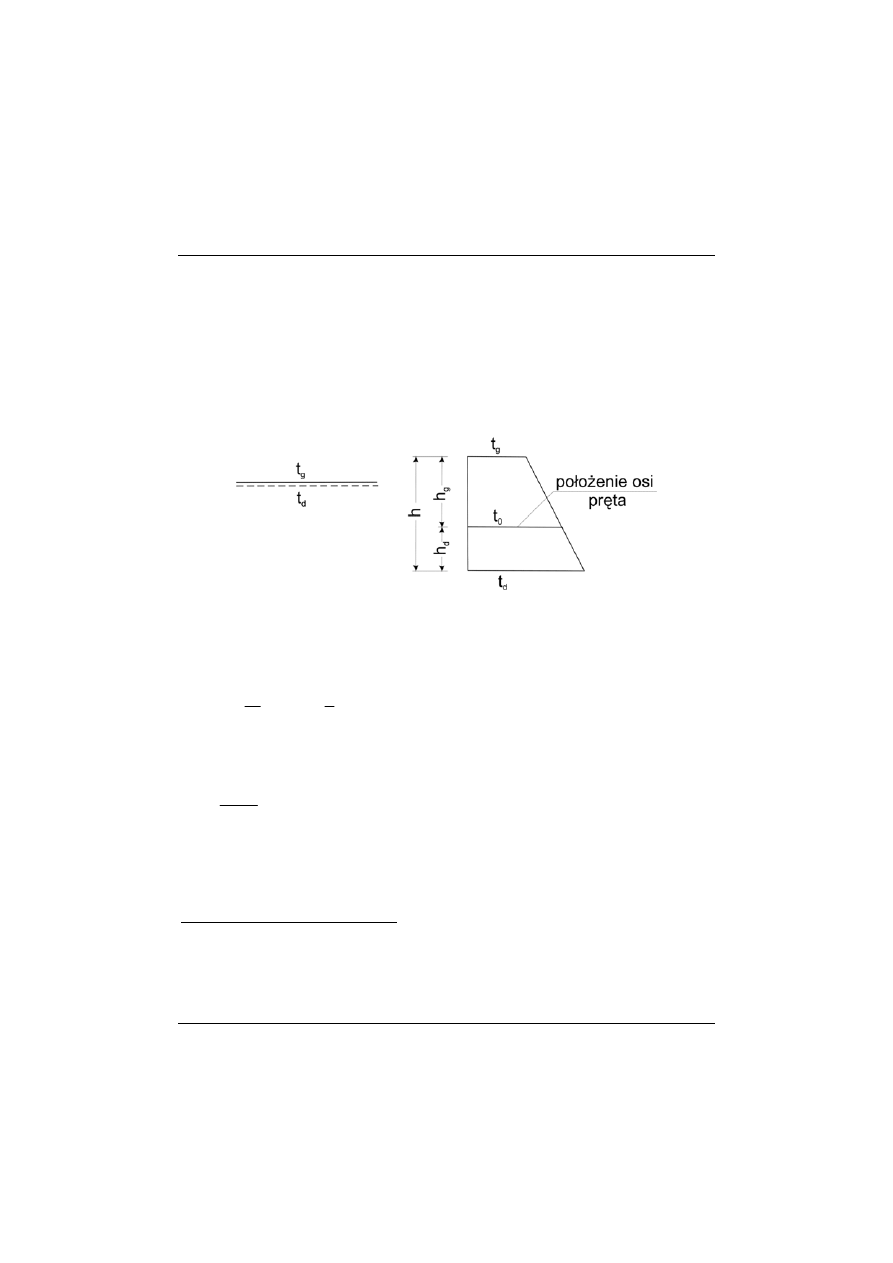
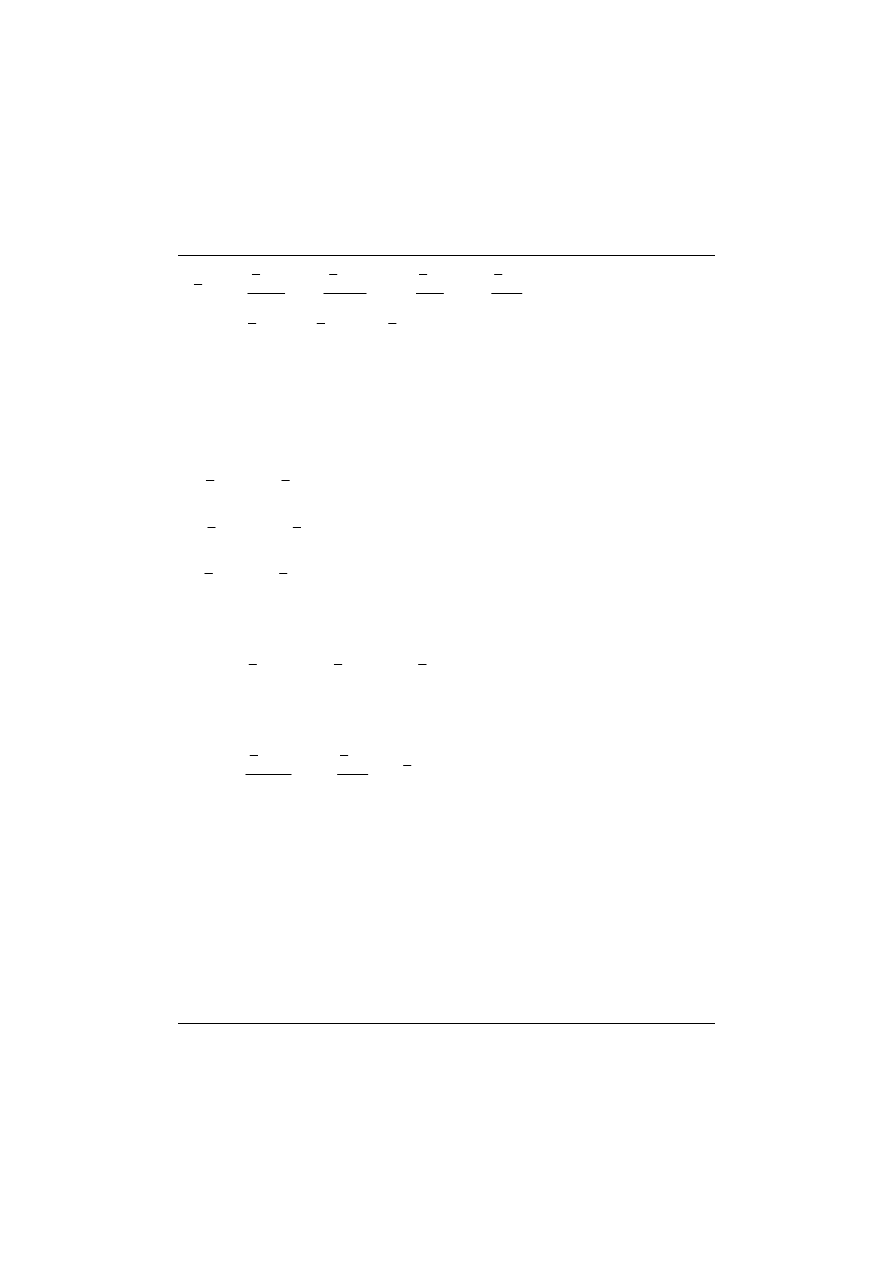
9.2. Przemieszczenia wywołane zmianami temperatury
Zmiana temperatury (względem temperatury montażu) powoduje, w wyniku
równomiernego działania temperatury - wzdłużne deformacje prętów (od-
kształcenia podłużne) oraz w wyniku nierównomiernego działania temperatu-
ry po wysokości przekroju prętów odkształcenia kątowe.
Rys. 9.1
Temperatura w osi pręta (porównaj do równomiernego działania temperatury)
wynosi
0
1
(
)
(
= +
−
=
+
g
)
g
d
g
d
g
g
d
h
t
t
t
t
t h
t h
h
h
, (9.4)
co w przypadku pręta symetrycznego względem poziomej osi przekroju po-
przecznego daje
0
2
+
=
d
g
t
t
t
. (9.5)
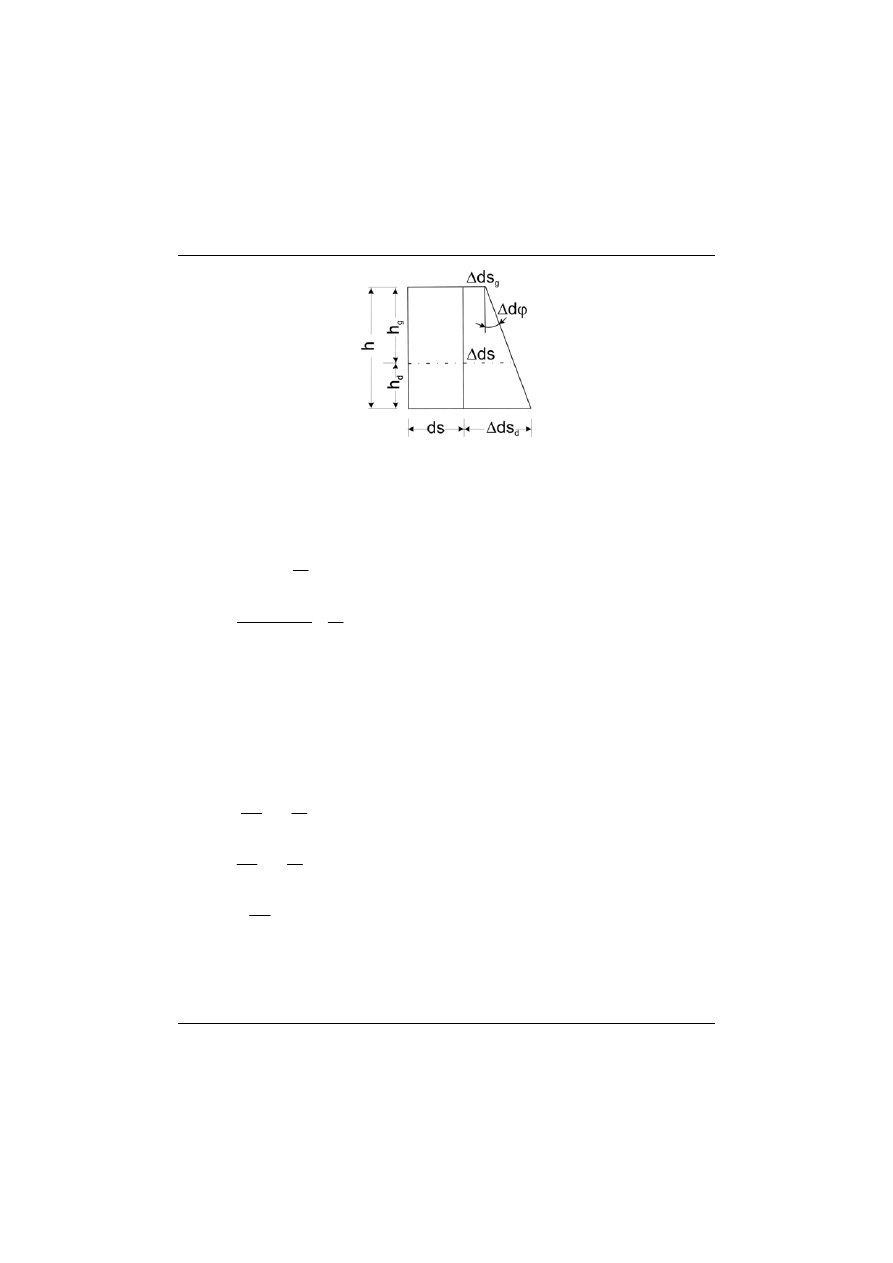
Deformacja (przemieszczenie płaskiego przekroju poprzecznego pręta) w wy-
niku nierównomiernego działania temperatury. Rozpatrzmy element pręta o
długości
.
ds
1
Zmiana temperatury wywołuje w układach statycznie niewyznaczalnych do-
datkowe wewnętrzne siły przekrojowe
,
t
N
t
M
, oraz siły w więzach sprę-
żystych.
t
T
t
S
Katedra Mechaniki Budowli
Wykład
Mechanika Budowli 1 [C16]
Politechnika Gdańska
2006
Marek Krzysztof Jasina
http://www.okno.pg.gda.pl –
45
–
jasina@pg.gda.pl
Rys. 9.2
, (9.6)
α
∆
=
g
t
g
ds
t ds
α
∆
=
d
t
d
ds
t ds
, (9.7)
0
(
α
α
∆ =
=
+
t
t
d
g
g
ds
t ds
t h
t h
ds
h
)
d
, (9.8)
(
)
α
ϕ
∆
−
∆
=
ds
d
∆
=
−
d
g
t
d
g
ds
t
t
ds
h
h
t
. (9.9)
Zmiana temperatury wywołuje w układach statycznie niewyznaczalnych do-
datkowe wewnętrzne siły przekrojowe
,
t
N
M
, T oraz siły w więzach sprę-
żystych.
t
t
S
Można zatem zapisać, że w wyniku nierównomiernego działania temperatury
wycinek pręta o długości
doznaje deformacji, które można zapisać odpo-
wiednio:
ds
(
)
α
ϕ
∆
=
+
−
t
t
t
d
M
d
ds
t
t
EI
h
g
ds
, (9.10)
(
α
∆
=
+
+
t
t
t
d
g
N
ds
ds
t h
t h
ds
)
g
d
h
, (9.11)
EA
κ
∆
=
t
t
T
dh
ds
GA
. (9.12)
oznacza współczynnik rozszerzalności termicznej.
W powyższych wzorach
α
i
Katedra Mechaniki Budowli
Wykład
Mechanika Budowli 1 [C16]
Politechnika Gdańska
2006
Marek Krzysztof Jasina
http://www.okno.pg.gda.pl –
46
–
jasina@pg.gda.pl
Po uwzględnieniu zależności (9.10) - (9.12) można zapisać następujące równa-
nie pozwalające wyznaczyć poszukiwane przemieszczenie
δ
it
0
1
(
)
δ
κ
α
α
=
+
+
+
+
+
−
∑
∫
∫
∫
∫
∫
i
t
i
t
i
t
i
t
i
it
s
s
l
l
l
t
i
t
i
d
g
l
l
N N
M M
T T
S S
ds
ds
ds
EA
EI
GA
k
N
t ds
M
t
t
ds
h
+
. (9.13)
W przypadku układów statycznie wyznaczalnych zależność (9.13) redukuje się
do postaci
0
1
α
δ
α
=
+
−
∫
∫
t
i
it
i
t
i
d
g
l
l
N
t ds
M
t
t
ds
h
(
)
. (9.14)
W przypadku układów kratowych, w których występują jedynie (stałe w prę-
tach) siły normalne zależności (9.13) i (9.14) redukują się do postaci
0
(
)
δ =
+
+
∑
∑
∑
ki
kt
i
t
it
k
ki
t
k
k
k
s
k
k
s
N N
S S
l
N
EA
k
α t l , (9.15)
0
δ
α
=
∑
it
ki
t
k
k
k
N
t l
. (9.16)
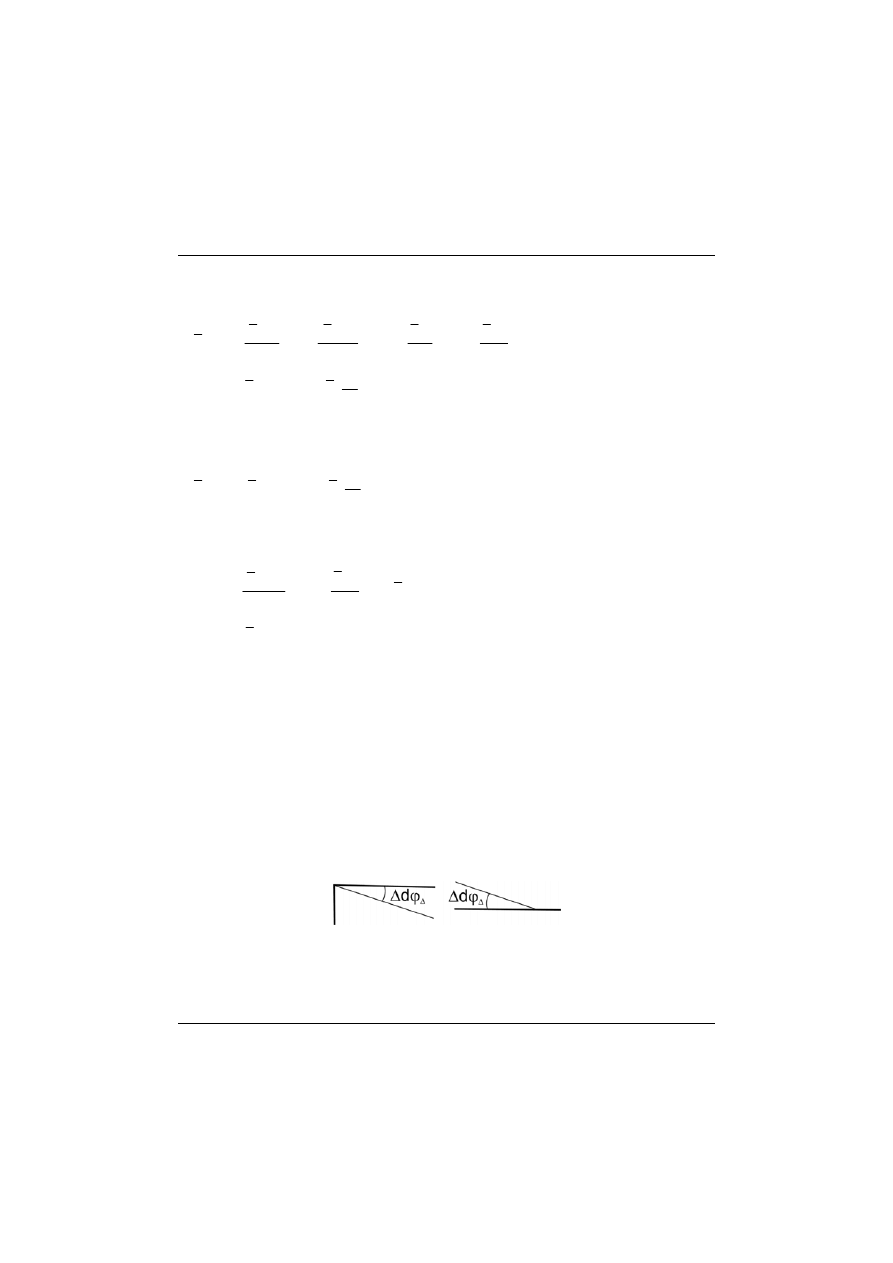
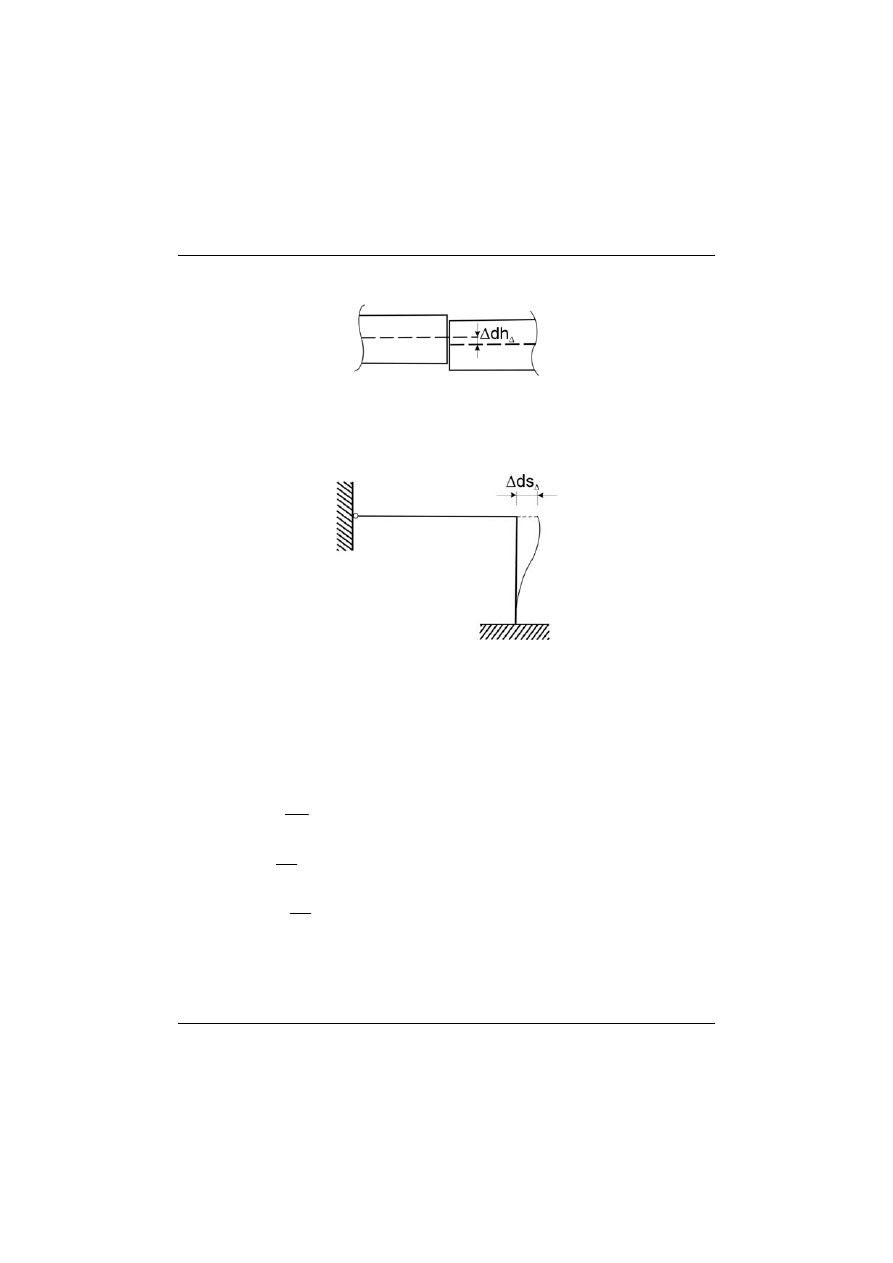
9.3. Przemieszczenia wywołane imperfekcjami
(niedokładnościami) geometrycznymi
Rzeczywiste konstrukcje zawierają różne niedokładności, w tym niedokładno-
ści (błędy) montażu. Najczęściej występują one w miejscu łączenia elementów.
Tego typu niedokładności można określić mianem imperfekcji geometrycznych.
Odchyłki od geometrii „idealnej”, czyli imperfekcje mogą mieć charakter ciągły
(np. wygięcie pręta) lub dyskretny (np. błędy montażu na styku pretów). Po-
niższe rysunki prezentują pewne typowe błędy montażu.
Łączenie elementów pod niewłaściwym kątem (rys. 9.3).
Rys. 9.3
Katedra Mechaniki Budowli
Wykład
Mechanika Budowli 1 [C16]
Politechnika Gdańska
2006
Marek Krzysztof Jasina
http://www.okno.pg.gda.pl –
47
–
jasina@pg.gda.pl
Łączenie elementów niewspółosiowo (rys. 9.4).
Rys. 9.4
Montaż elementów o nieprawidłowej (względem projektowanej) długości
(rys. 9.5).
Rys. 9.5
Imperfekcje wywołują w układach statycznie niewyznaczalnych dodatkowe
wewnętrzne siły przekrojowe
∆
N
,
∆
M
∆
T
∆
S
,
oraz siły
w więzach sprężystych
(oznaczenia
∆
analogiczne jak w przypadku przemieszczeń podpór).
Można zapisać, że w wyniku imperfekcji wycinek pręta o długości
doznaje
deformacji, odpowiednio zapisanej poniżej.
ds
ϕ
ϕ
∆
∆
∆
= ∆
+
M
d
d
EI
ds
, (9.17)
∆
∆
∆ = ∆
+
N
ds
ds
ds
EA
, (9.18)
κ
∆
∆
∆
= ∆
+
T
dh
dh
ds
GA
. (9.19)
Po uwzględnieniu zależności (9.17) - (9.19) można zapisać następujące równa-
nie pozwalające wyznaczyć poszukiwane przemieszczenie
δ
∆
i
Katedra Mechaniki Budowli
Wykład
Mechanika Budowli 1 [C16]
Politechnika Gdańska
2006
Marek Krzysztof Jasina
http://www.okno.pg.gda.pl –
48
–
jasina@pg.gda.pl
1
δ
κ
ϕ
∆
∆
∆
∆
∆
∆
∆
=
+
+
+
+
∆
+
∆
+
∆
∑
∫
∫
∫
∫
∫
∫
i
i
i
i
i
i
s
s
l
l
l
i
i
i
l
l
l
N N
M M
T T
S S
ds
ds
ds
EA
EI
GA
k
N ds
M
d
T dh
∆
+
. (9.20)
W układach statycznie wyznaczalnych mamy
0
∆
=
N
,
0
∆
=
M
0
∆
=
T
0
∆
=
S
,
oraz
.
Ponieważ w układach błędy montażu występują na ogół tylko dyskretnie (w
pewnych punktach) to w takich przypadkach odpowiednie całki we wzorze
(9.20) można zapisać jako poniższe sumy.
∆
∆
=
∆
∑
∫
l
N
d
i
mi
m
m
s
N
ds
, (9.21)
ϕ
ϕ
∆
∆
=
∆
∑
∫
i
ni
n
l
n
M
d
M
d
, (9.22)
∆
∆
=
∆
∑
∫
i
ki
k
l
T dh
T
dh
k
, (9.23)
Co w przypadku układów statycznie wyznaczalnych pozwala zapisać wzór
(9.20) w postaci
δ
ϕ
∆
=
∆
+
∆
+
∆
∑
∑
∑
i
mi
m
ni
n
ki
m
n
k
N
ds
M
d
T
dh
k
. (9.24)
W przypadku układów kratowych, w których występują jedynie (stałe w prę-
tach) siły normalne zależność (9.24) redukuje się do postaci
(
)
δ
∆
∆
∆
=
+
+
∑
∑
∑
ki
k
i
i
k
k
s
k
k
s
N N
S S
l
EA
k
∆
ki
k
N
l
, (9.25)
Document Outline
Wyszukiwarka
Podobne podstrony:
2010 12 WIL Wyklad 09id 27185 Nieznany (2)
1 252010 12 09 WIL Wyklad 09id Nieznany
LOGIKA wyklad 5 id 272234 Nieznany
ciagi liczbowe, wyklad id 11661 Nieznany
0 konspekt wykladu PETid 1826 Nieznany
AF wyklad1 id 52504 Nieznany (2)
Neurologia wyklady id 317505 Nieznany
MATERIALY DO WYKLADU CZ VIII i Nieznany
MATERIALY DO WYKLADU CZ V id 2 Nieznany
ZP wyklad1 id 592604 Nieznany
GOGN Wyklad 6 scalenie i podzia Nieznany
CHEMIA SA,,DOWA WYKLAD 7 id 11 Nieznany
or wyklad 1 id 339025 Nieznany
II Wyklad id 210139 Nieznany
cwiczenia wyklad 1 id 124781 Nieznany
BP SSEP wyklad6 id 92513 Nieznany (2)
2006C16 wyklad 02
2006C16 wyklad 05 (2)
więcej podobnych podstron