Badanie Transformatora Trójfazowego:
1. Budowa transformatora trójfazowego:
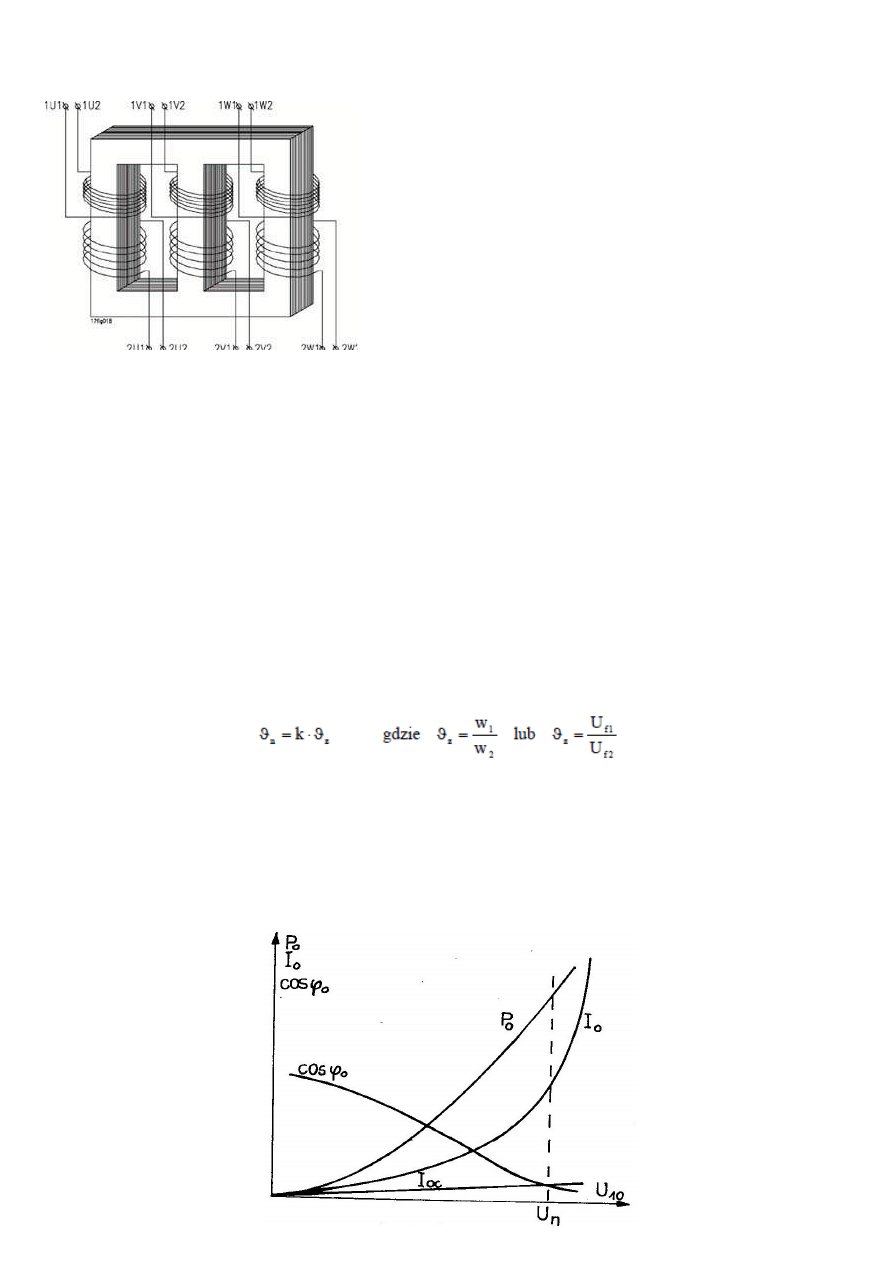
Transformator 3fazowy może być zbudowany z trzech
jednofazowych transformatorów lub jako samodzielna jednostka o
trzech lub pięciu kolumnach. Transformatory zbudowane są z
rdzenia oraz z uzwojeń górnego i dolnego. Rdzeń wykonany jest z
warstw blachy rozdzielonych cienką warstwą izolacji co zmniejsza
straty i grzanie jednostki. Uzwojenie jest z miedzi lub aluminium po
nawijane jak na obrazku.
2. Zasada działania transformatora trójfazowego:
Uzwojenie pierwotne górnego napięcia GN transformatora zasila się symetrycznym układem napięć
trójfazowych U
A
, U
B
, U
C
przesuniętych w czasie względem siebie o kąt 2π/3. Strumienie magnetyczne
poszczególnych transformatorów Φ
A
, Φ
B
, Φ
C
są przesunięte w stosunku do napięcia danej fazy o kąt π/2 i
tworzą także symetryczny układ trójfazowy. Wynika to ze związku zależności strumienia od napięcia
wywołującego u(t)=dΦ(t)/dt. Jeśli przebieg u(t) jest sinusoida, to przebieg Φ(t) jest cosinusoida. Pomiędzy
strumieniami zachodzi związek Φ
A
+ Φ
B
+ Φ
C
=0.
Kształt przebiegu strumienia magnetycznego i napięcia indukowanego w uzwojeniu wtórnym (dolnego napięcia
DN) transformatora trójfazowego zależy głownie od budowy rdzenia i materiału, z jakiego jest wykonany oraz
układu połączeń uzwojeń fazowych obu stron transformatora.
3. Podać definicję i sposób wyznaczania przekładni napięciowej transformatora trójfazowego:
Przekładnią napięciową ϑ
n
transformatora trójfazowego jest iloraz znamionowych napięć miedzyprzewodowych
strony GN U
1
i strony DN U
2
. Może to być wartość inna niż przekładnia zwojowa ϑ
z
, określająca iloraz liczby
zwojów, albo iloraz napięć fazowych stron GN i DN.
W zależności od układu połączeń uzwojeń transformatora przekładnie napięciowe ϑ
n
można wyrazić przez
przekładnie zwojową ϑ
z
następująco:
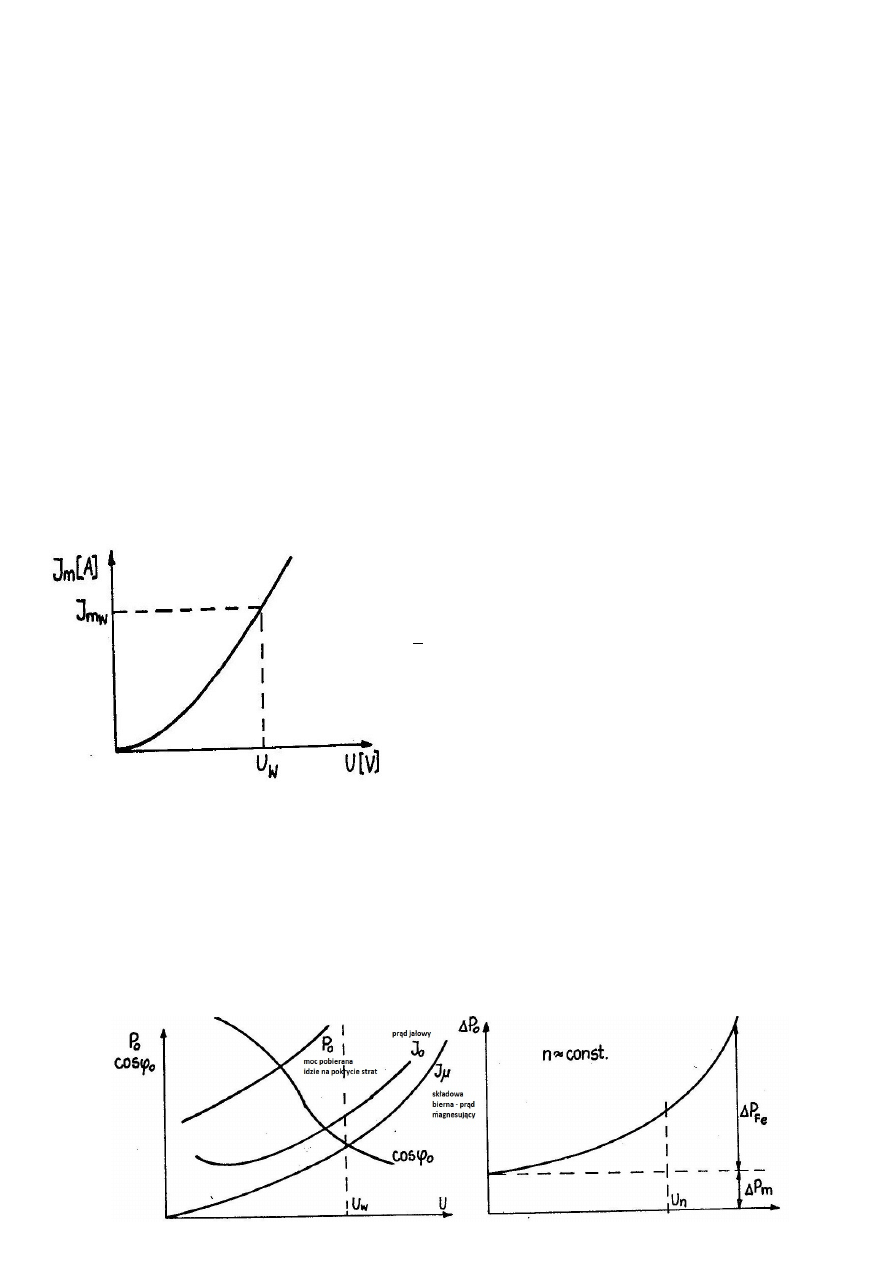
4. W jaki sposób i w jakim celu wykonuje się pomiary w stanie jałowym transformatora:
Celem próby stanu jałowego jest wyznaczenie strat w rdzeniu (żelazie), ocenić własności jego obwodu
magnetycznego, oraz prądu stanu jałowego transformatora. Wyznaczenie parametrów poprzecznych R
Fe
i X
μ
Pomiary wykonuje się zasilając uzwojenie pierwotne napięciem z autotransformatora, podnosząc napięcie od
320 V do 400 (co 20V), przy założeniu sinusoidalnego napięcia w sieci zasilającej o częstotliwości 50 Hz.
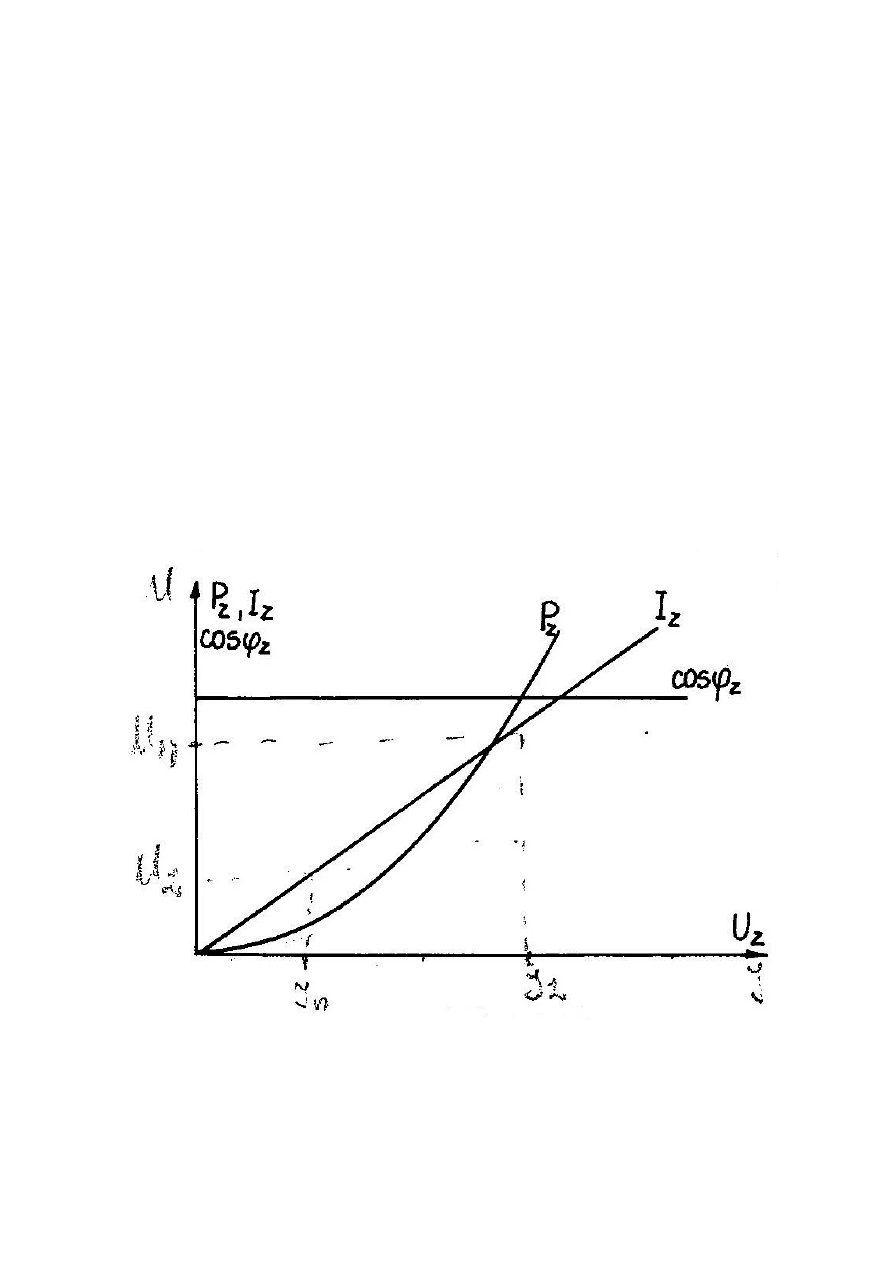
5. Przedstawić ch-ki prądu, mocy i współczynnika mocy w stanie jałowym transformatora:
6. Wyjaśnić różnicę między zwarciem laboratoryjnym i eksploatacyjnym:
W zwarciu laboratoryjnym przy zwarciu zacisków wtórnych po przyłożeniu napięcia (zwarcia) do zacisków
pierwotnych popłynie prąd znamionowy. Jednak w czasie badań jest to niewielki ułamek napięcia jakie byłoby
w czasie normalnej eksploatacji, co pozwala dokonać pomiarów stanu zwarcia. Zwarcie eksploatacyjne przy
"pełnym" napięciu doprowadziłoby do spalenia/całkowitego zniszczenia transformatora.
7. W jaki sposób i w jakim celu wykonuje się pomiary w stanie zwarcia transformatora:
Pomiary w stanie zwarcia wykonuje się po zwarciu zacisków wtórnych (uzwojenie dolne) i zasileniu strony
pierwotnej (uzwojenie górne) regulowanym napięciem z autotransformatora. Zasilenie uzwojenia górnego
ułatwia zadanie ze względu na łatwiejszy dobór przyrządów pomiarowych (wyższe napięcie i mniejszy prąd).
Pomiary wykonuje się od takiego napięcia zasilającego by prąd zwarcia nie przekraczał 1,3 I
n
(prądu
znamionowego) stopniowo napięcie zmniejszając do zera. Pomiar stanu zwarcia pozwala wyznaczyć sprawność
dla dowolnego obciążenia, parametry podłużne schematu zastępczego, obliczaniu prądów zwarciowych i
wykreśleniu charakterystyk zewnętrznych. Przyjmuje się, że moc czynna pobierana przez transformator jest
równa stratom obciążeniowym, ponieważ strumień magnetyczny w czasie pomiarów jest mały, bo napięcie nie
przekracza kilkunastu procent napięcia znamionowego.
8. Podać definicję i sposób wyznaczenia napięcia zwarcia transformatora trójfazowego:
Napięcie zwarcia to napięcie jakie pojawi się w transformatorze w stanie zwarcia, gdy płynie przez niego prąd
znamionowy. Pomiar napięcia zwarcia można przeprowadzić zasilając dowolne uzwojenie przy zwarciu
pozostałego.
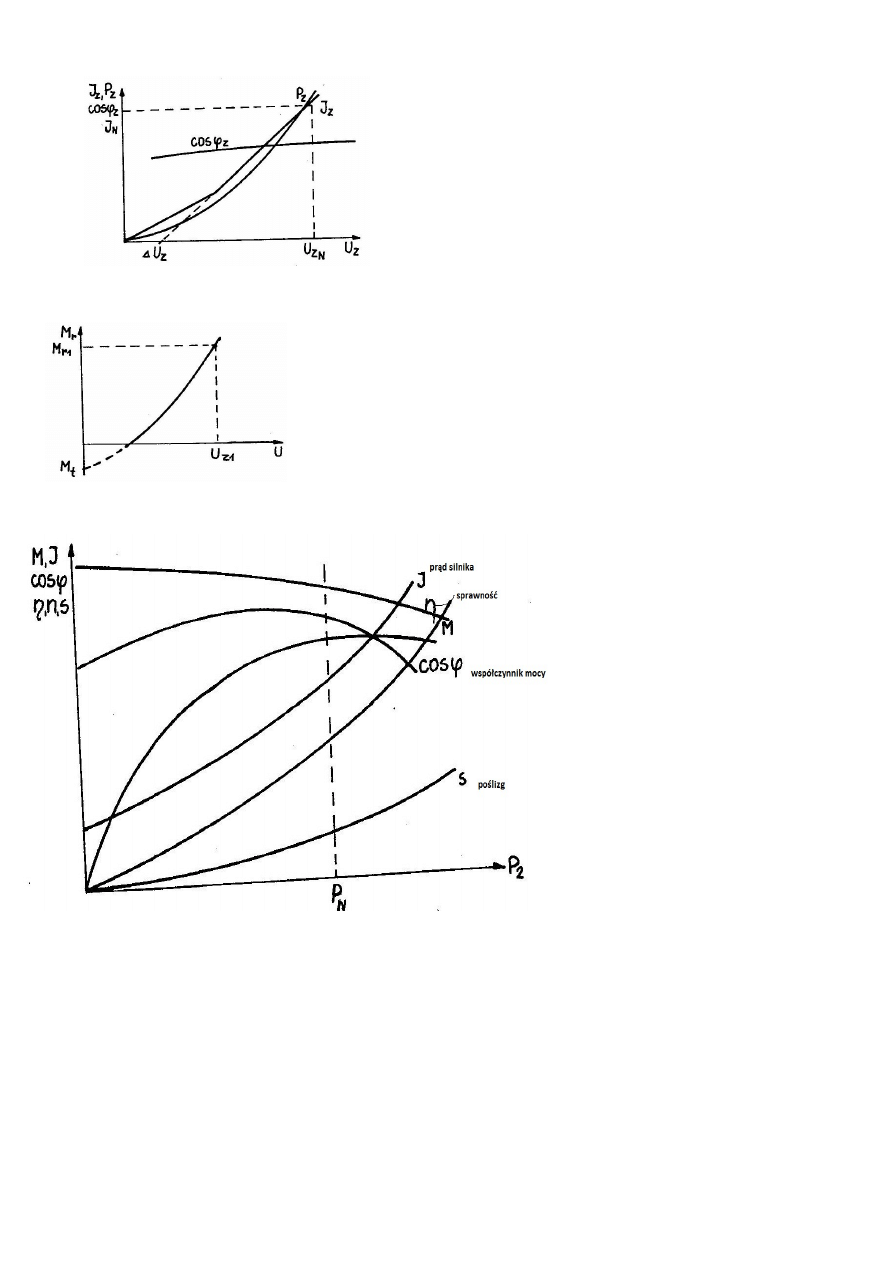
9. Przedstawić ch-ki teoretyczne prądu mocy i współczynnika mocy w stanie zwarcia
transformatora:
10. W jaki sposób i w jakim celu wykonuje się pomiary w stanie obciążenia transformatora:
W stanie jałowym w warunkach pełnej symetrii dla transformatora trójfazowego, stosuje się układ zastępczy
transformatora jednofazowego, przy czym wiekości w nim występujące są wielkościami fazowymi. Korzystają
z pomiaru w stanie jałowym i stanie zwarcia oraz z pomiaru rezystancji uzwojeń prądem stałym wyznacza się
parametry układu zastępczego.
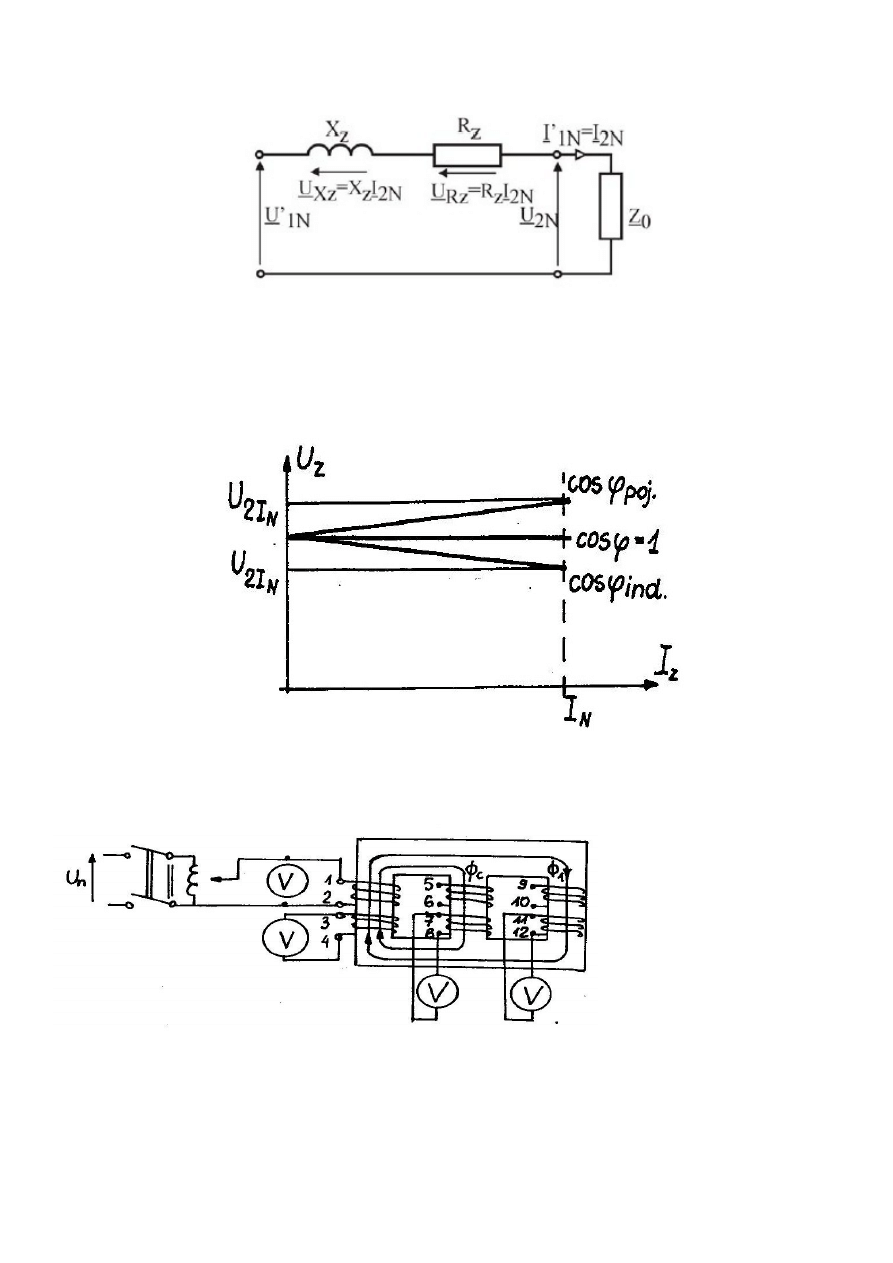
11. Zdefiniować pojęcie zmienności napięcia transformatora trójfazowego:
Zmienność napięcia wtórnego zależy nie tylko od wartości prądu obciążenia, ale i od jego charakteru, czyli
współczynnika mocy cosφ
2
. Zmienność tego napięcia może być w przybliżeniu wyznaczona w oparciu o
uproszczony schemat zastępczy obciążonego transformatora.
Jedną z charakterystycznych własności ruchowych transformatora jest zakres wahań napięcia strony wtórnej
przy przejściu od stanu jałowego do stanu obciążenia znamionowego. Dla określenia tej właściwości
wprowadza się pojęcie zmienności napięcia δ
u
. Określa ona zmianę wartości napięcia wtórnego przy przejściu
od pracy jałowej do pracy znamionowej przy określonym współczynniku mocy, niezmienionym napięciu
pierwotnym i niezmienionej częstotliwości. Zmianę napięcia podaje się w % napięcia znamionowego wtórnego.
12. Przedstawić ch-ki zewnętrzne transformatora dla różnych rodzajów obciążenia:
Praca równoległa Transformatorów Trójfazowych:
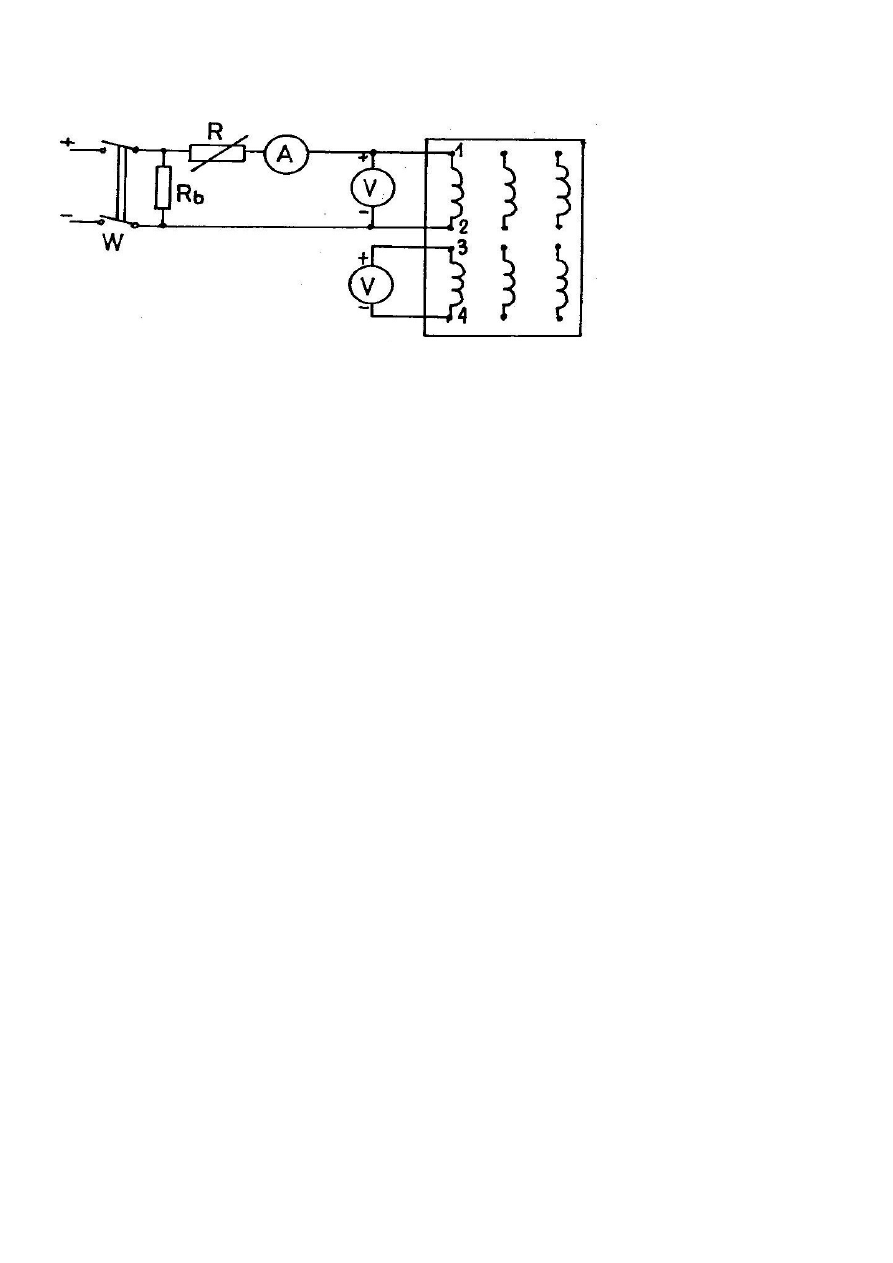
1. Jak sprawdzić czy uzwojenia transformatora trójfazowego leżą na tej samej kolumnie:
Należy połączyć układ:
Zasila uzwojenie 1-2 napięciem
znamionowym, mierzy się napięcie
stron wtórnych U
3-4
, U
7-8
, U
11-12
.
Całkowity strumień magnetyczny,
wytwarzany przez uzwojenie
zasilane, sprzężony jest w całości
tylko z tym uzwojeniem, które
znajduje się na tej samej kolumnie.
Wobec tego przy zasilaniu np.
Uzwojenia 1-2 musi zachodzić
zależność U
3-4
>(U
7-8
≈ U
11-12
).
Pomiar należy powtórzyć dla każdej kolumny, tzn. Zasilając kolejno uzwojenia 1-2, 5-6, 9-10 mierzy się
napięcia stron wtórnych. Uzwojenie, na którym wy indukuje się największa wartość napięcia, stanowi z
uzwojeniem zasilającym :parę" i leży na tej samej kolumnie.
2. W jakie sposób wyznaczyć początki i końce uzwojeń leżących na tej samej kolumnie
transformatora:
O tym, czy dany zacisk jest początkiem czy końcem uzwojenia, decyduje kierunek nawijania tego uzwojenia
tego uzwojenia na kolumnie rdzenia transformatora. Przyjęcie dowolnego zacisku dowolnego uzwojenia jako
jego początku czy końca, pociąga
za sobą automatycznie określenie
początków i końców innych
uzwojeń. Jako zasadę przy
określaniu początków i końców
należy
przyjąć,
że
jednoimiennymi
zaciskami
uzwojeń transformatora są te
zaciski, do których prąd
wpływając (lub wypływając z
nich) powoduje powstanie w
rdzeniu transformatora strumieni magnetycznych o tym samym kierunku. Dla transformatora wielofazowego,
jako wspólny kierunek strumienia rozumie się kierunek w dół lub w górę kolumn. Metoda prądu stałego: zasilić
wybrane uzwojenie i użyć do pomiaru woltomierzy magnetoelektrycznych z zerem na środku skali. Jesli przy
załączaniu lub wyłączaniu źródła napięcia obydwa woltomierze wychylają się w tę samą stronę to ich bieguny
dodatnie (ujemne) są przyłączone do jednoimiennych zacisków w przypadku uzwojeń leżących na tej samej
kolumnie oraz zacisków różnoimiennych w przypadku uzwojeń leżących na różnych kolumnach.
3. Na czym polega i czym jest spowodowana praca równoległa transformatorów trójfazowych:
Praca równoległa transformatorów polega na jednoczesnym działaniu kilku połączonych ze sobą jednostek co
daje efekt praktyczny pracy bardzo dużego transformatora, którego produkcja, transport i instalacja byłaby
kłopotliwa, ze względu na gabaryty, oraz co oczywiste zajmowałby więcej miejsca niż kilka połączonych
pracujących równoległych jednostek. Konieczność taka zachodzi gdy moc zapotrzebowania jest większa od
mocy pojedynczych jednostek i/lub gdy moc odbioru zmienia się w szerokim zakresie w czasie (doby, pory
roku). Jednostki muszą być dobrane tak by ich współpraca była jak najbardziej korzystna/dopasowana.
4. Jakie podstawowe warunki muszą być spełnione, aby transformatory mogły pracować
równolegle? Podać dopuszczalne odchyłki:
a) równość przekładni transformatorów
b) jednakowa grupa połączeń
c) przyłączenia jednoimiennych zacisków wszystkich współpracujących transformatorów do tych samych szyn
zbiorczych
d) równość napięć zwarcia transformatorów
e) równość współczynnika mocy przy stanie zwarcia dla poszczególnych transformatorów
Nie ma dwóch całkowicie identycznych transformatorów zatem dopuszcza się odchyłki:
odchyłka przekładni nie przekracza 0,5% ; odchyłka wartości napięć zwarcia nie przekracza 10% ich wartości
średniej.
5. Jakie są skutki niespełnienia warunków pracy równoległej i połączenia transformatorów do
wspólnej pracy:
Niespełnienie warunków (a, b, c) skutkuje przepływem przez uzwojenie prądów wyrównawczych. Prądy te
będą płynąć również przy biegu jałowym. Warunki d oraz e decydują o równomiernym obciążaniu się
transformatorów, a co za tym idzie o ich pełnym wykorzystaniu.
6. Co świadczy o prawidłowej pracy równoległej transformatorów:
1. Brak prądu w uzwojeniach wtórnych przy odłączonych odbiorach; w uzwojeniu pierwotnym płynie tylko
prąd jałowy. 2. Równomierne, tzn. proporcjonalne do mocy znamionowej obciążenie poszczególnych
transformatorów pracujących równolegle ; przy obciążeniu równym sumie mocy wszystkich transformatorów
każdy z nich powinien być obciążony mocą znamionową. 3. Zgodność faz prądów obciążenia poszczególnych
transformatorów.
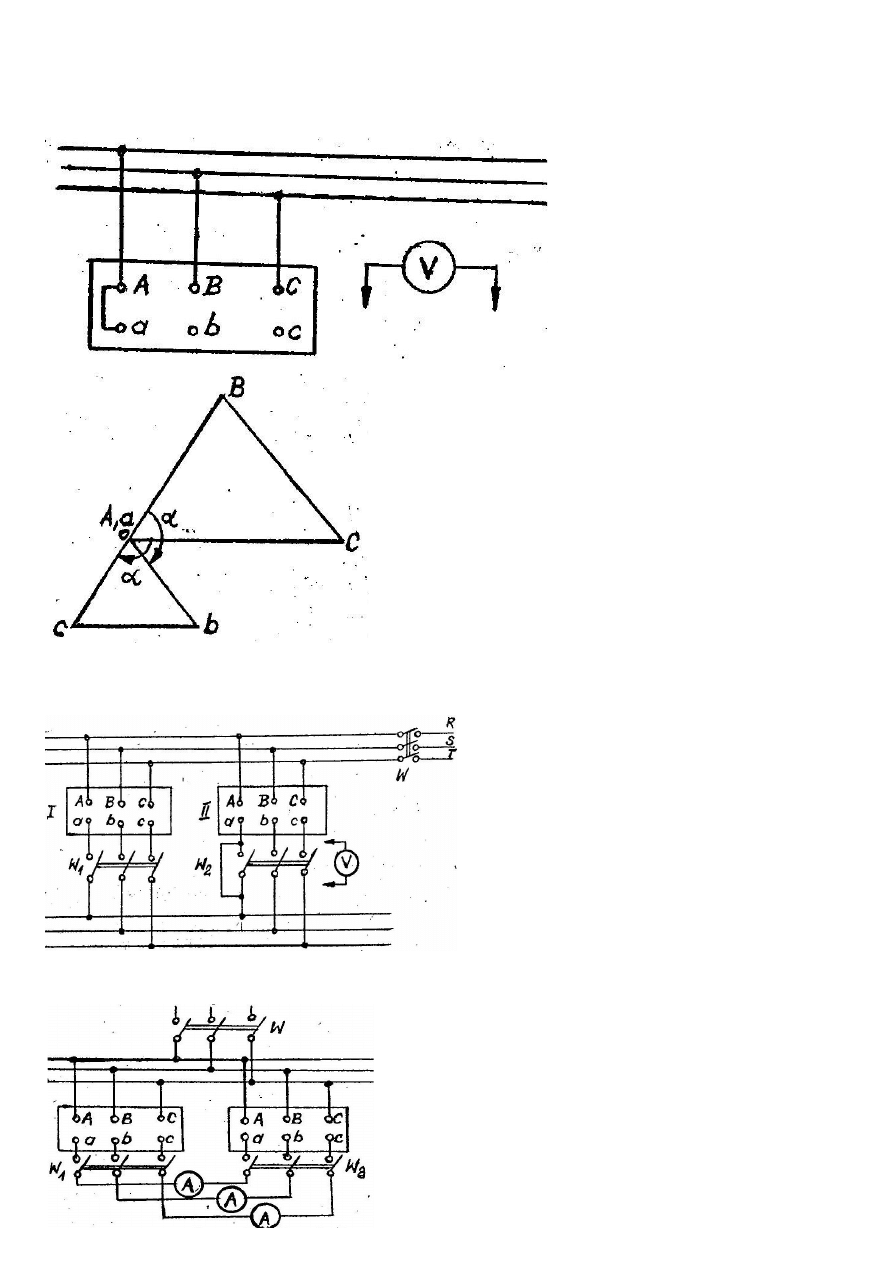
7. W Jaki sposób można wyznaczyć grupę połączeń uzwojeń transformatorów trójfazowych:
Zazwyczaj nie można tego po prostu zobaczyć, ponieważ jest to zamknięte w obudowie na zewnątrz której
wyprowadzone są tylko główne zaciski, można odczytać z tabliczki znamionowej. Najczęściej stosowana jest
metoda pomiaru napięć, czyli metoda woltomierz-owa. W układzie należy zasilić transformator symetrycznym
napięciem znamionowym. Następnie zmierzyć napięcia między zaciskowe górne U
AB
, U
AC
, U
BC
, dolne U
ab
, U
ac
,
U
bc
oraz "boczne" U
bb
, U
cc
i "przekątne"
U
bc
, U
cb
. Na podstawie pomiarów
narysować wykres topograficzny napięć
między zaciskowych, jak na rysunku.
Należy rozpocząć od wykreślenia trójkąta
ABC o bokach równych zmierzonemu
napięciu górnemu. Przy założeniu, że
wektory wykresu wirują w lewo,
oznaczenie wierzchołków tego trójkąta
winny obiegać go w prawo. Punkt a jest
określony jednoznacznie z pkt A, gdyż wg
schematu połączenia zaciski te zostały
zwarte. Dla określenia pkt b zakreśla się łuki promieniami
odpowiadającymi napięciom U
bb
, U
cc
U
ab
odpowiednio z punktów
B, C, a. Łuki te powinny przeciąć się w 1 pkt, który odpowiada
zaciskowi b. Podobnie wyznacza się pkt c, łukami długości napięć
U
cc
, U
BC
, U
ab
odpowiednio z pkt C, B, a. Łuki te przecinają się w 1
pkt, który jest pkt c. Następnie sprawdza się, czy długość odcinka
bc odpowiada zmierzonemu napięciu U
bc
i czy oznaczenia
wierzchołków trójkąta abc obiegają trójkąt w prawo. Jeżeli wypadł
obieg lewy, wnioskujemy, że kolejność oznaczeń zacisków GN; do
oznaczenia kąta konieczne jest wówczas odpowiednio
przemianowanie zacisków. Szukamy kąta α odczytujemy z
wykresu jako kąt B
ab
albo kąt C
ac
, mierzony zgodnie z kierunkiem
wskazówek zegara. W tym przypadku jest on równy 120
o
.
8. W Jakim celu i w jaki sposób wykonuje się pomiar napięć na wyłączniku do pracy równoległej:
Po stwierdzeniu, że transformatory mogą pracować równolegle podłącza się, je wg schematu:
Wyłącznik W1 zamyka się, a w W2 zwiera tylko 1fazę
i po podaniu napięcia zasilającego sprawdzamy
woltomierzem napięcie na pozostałych niezwartych
stykach W2. Jeśli transformatory zostały poprawnie
połączone, woltomierz na W2 wskazuje zero lub
prawie zero. Jeśli nie to miedzy niezamkniętymi
stykami W2 pojawia się duże napięcie nawet 2razy
większe od znamionowego. Znaczy to, że
transformatory zostały źle podłączone do pracy
równoległej.
9. W Jakim celu i w jaki sposób wykonuje się pomiar prądów wyrównawczych transformatorów
pracujących równolegle:
Prądy wyrównawcze mierzy się w stanie jałowym włączając
amperomierze po stronie wtórnej między odpowiednie zaciski wg
schematu. W idealnym przypadku winny one być równe zeru.
Ponieważ przepisy zezwalają na łączenie do pracy równoległej
transformatorów, których przekładnie różnią się o ±0,5%,
zapewnia to ograniczenie wartości prądu wyrównawczego, który
w tych warunkach nie powinien przekraczać 2 do 7 % I
n
(prądu
znamionowego).
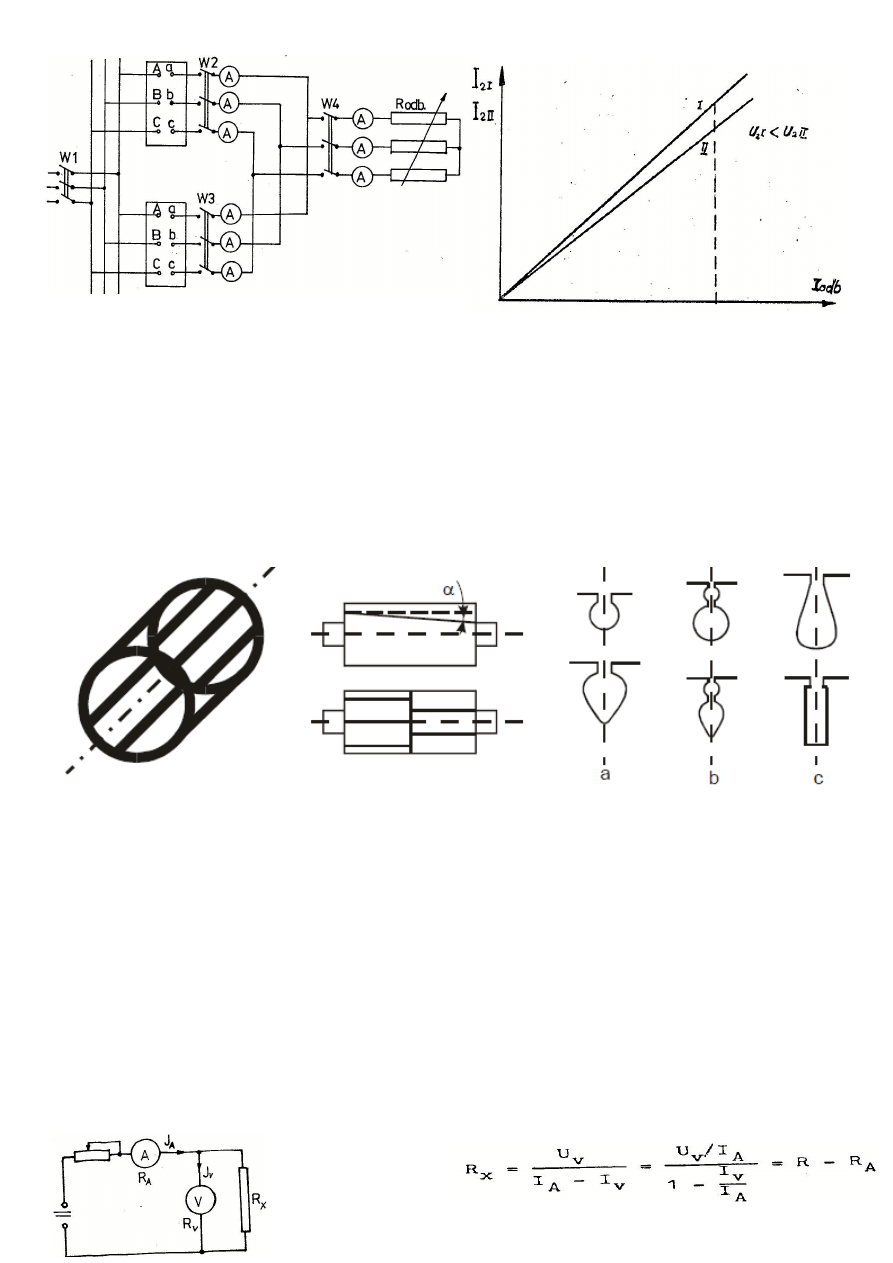
10. W jaki sposób przeprowadza się próbę obciążenia transformatorów połączonych równolegle:
Odbiornikiem jest trójfazowy opornik wodny. Zmieniając wartość impedancji odbiornika mierzymy prądy obu
transformatorów i prąd płynący do odbiornika. Pomiary pozwalają wykreślić charakterystykę. W przypadku
równości napięć zwarcia obu transformatorów, transformatory będą obciążać się równomiernie, osiągając
jednocześnie swoje moce znamionowe. Jeśli występuje różnica między napięciami zwarcia badanych
transformatorów, obciążenia rozkładają się nierównomiernie, odwrotnie proporcjonalnie do napięć zwarcia w
całym zakresie mocy. Charakterystyki są prostoliniowe przechodzą przez początek układu. Jeśli pojawiają się
prądy wyrównawcze, spowodowane różnicami w przekładniach, zależność prostoliniowa będzie naruszona,
zwłaszcza przy mniejszych obciążeniach i charakterystyki nie przejdą przez początek układu.
Badanie silnika indukcyjnego klatkowego:
1. Budowa silnika klatkowego indukcyjnego trójfazowego:
a) wirnik z klatką prętową
b) wirniki dwuklapkowe
c) wirniki klatkowe głęboko żłobkowe
Zarówno w stojan jak i wirnik zbudowany jest z cienkich izolowanych od siebie blach, ze żłobkami, w których
są wiązki drutów miedzianych również izolowane od siebie. W wirniku dla wyeliminowania pierścieni
ślizgowych i szczotek uzwojenie wirnika nie jest wyprowadzone na zewnątrz, lecz zwarte bezpośrednio na
czołach wirnika pierścieniami zwierającymi. Zwoje mają postać nieizolowanych prętów ze stopu aluminium lub
miedzi ułożonych w żłobkach wykrojonych w pakiecie blach. Pręty te stanowią wraz z pierścieniami
zwierającymi tzw. Klatkę. Odstępu między prętami są jedną z przyczyn powstawania pulsacji w przebiegu
momentu elektrycznego. Eliminuje się je przez skręcenie klatki wzdłuż osi wirnika lub przez dodanie trzeciego
pierścienia zwierającego w połowie długości wirnika i częściowy obrót tak powstałych pół klatek względem
siebie.
2. Zasada działania silnika klatkowego indukcyjnego trójfazowego:
Prąd płynąc przez uzwojenia stojana indukuje siłę elektromotoryczną (strumień magnetyczny Φ), który
wprawia wirnik w ruch obrotowy, obroty wirnika o wartość poślizgu są mniejsze od prędkości strumienia Φ.
3. W jaki sposób można zmierzyć rezystancję uzwojeń silnika klatkowego indukcyjnego:
Wartość rezystancji ze wskazań przyrządów wynosi: R=U
V
/ I
A
Wartość rzeczywista Rx:
Jest to metoda
techniczna, pomiary
wykonuje się w stanie zimnym, pozwala wyeliminować uszkodzenia uzwojeń.
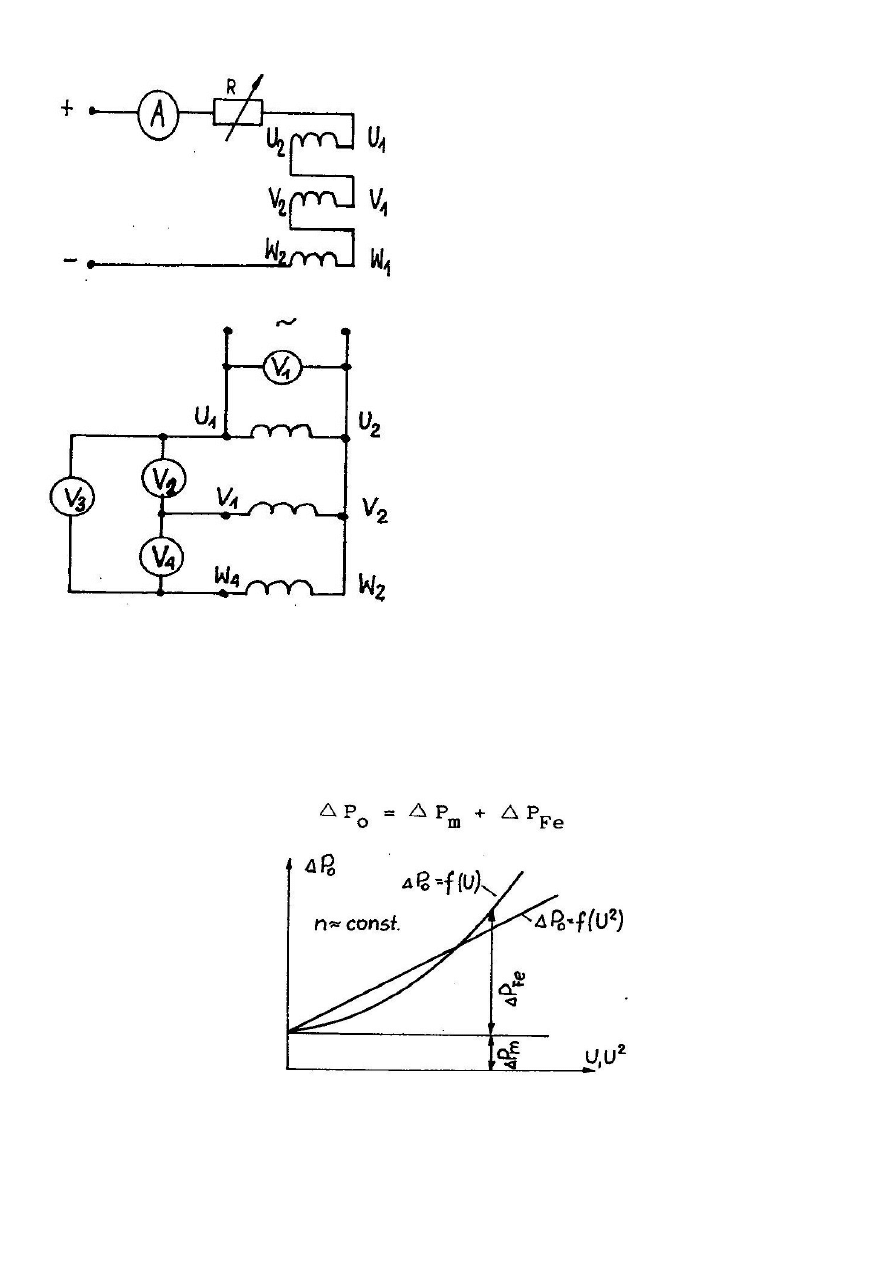
4. W jaki sposób można początki i końce uzwojeń silnika klatkowego indukcyjnego:
Metoda prądu stałego:
Uzwojenie fazowe w szereg i puścić prąd stały 0,5 In
(znamionowego). Po tym uzwojenie wytworzy własne pole
magnetyczne. Połączone poprawnie (koniec jednego z
początkiem drugiego) to wypadkowe pole stałe będzie równe
zero, bo przesunięcie składowych jest o 2/3π. Niewłaściwe
połączenie powoduje płynięcie prądu w odwrotnym kierunku
w jednej z faz wtedy wytworzone pole magnetyczne różne jest
od zera. W tej sytuacji obracany wirnik, wytworzy się siła
elektromotoryczna rotacji wywoła przepływ prądu, co zgodnie
z regułą Lenza będzie przyczyną powstania momentu
hamującego. W przypadku braku pola (wypadkowe równe
zero) taki moment nie występuje. W praktyce nalezy wirnik
obrócić ręcznie sprawdzając występowanie oporu. Pomiar
wykonuje się dla takiej ilości kombinacji połączeń uzwojeń
stojana, która umożliwi jednoznaczne określenie początków i
końców uzwojeń.
Metoda prądu przemiennego:
Uzwojenia stojana w gwiazdę, jedno zasilić prądem
przemiennym. Uzwojenie zasilone wytwarza przemienne pole
magnetyczne, sprzęga się ono z pozostałymi uzwojeniami. W
wyniku tego w fazach niezasilonych powstają strumienie,
połowę mniejsze od strumienia fazy zasilanej. Indukowane w
niezasilanych siły elektromotoryczne są o połowę mniejsze od
napięcia zasilającego. Jest tak, gdy połączenie zacisków stojana
z rysunku jest poprawne. Woltomierze 2 i 3 pokażą połowę
wartości z woltomierza 1, woltomierz 4 pokaże około 0.
5. Cel i sposób przeprowadzania pomiarów w stanie jałowym silnika indukcyjnego klatkowego:
Celem pomiarów stanu jałowego jest wyznaczenie strat mechanicznych (wynikają z ruchu) i strat w żelazie
(wydzielane ciepło). Zasila się stojan z sieci 3-fazowej i pozwala pracować bez obciążenia (na wale nie ma
odbiornika mocy mechanicznej). Napięcie zasilające silnik ustawia się na 1,3U
N
(napięcia znamionowego), i
zmniejsza do wartości gdy obroty będą stanowić około 95% tych jakie są gdy napięcie zasilające równe jest
dokładnie U
N
(około 0,3U
N
to następuje).
6. Przebiegi teoretyczne ch-k stanu jałowego silnika indukcyjnego klatkowego:
7. Cel i sposób przeprowadzania pomiarów w stanie zwarcia silnika indukcyjnego klatkowego:
Pomiar w stanie zwarcia pozwala wyznaczyć moment rozruchowy (Mr) silnika, oraz zbadać zależność między
napięciem zasilającym a prądem zwarcia. Próbę przeprowadza się jak w stanie jałowym, jednak wirnik hamuje
się za pomocą hamulca (by się nie kręcił), a napięcie zasilające zwiększa się od 0 do wartości przy jakiej
zmierzony prąd zwarcia nie przekroczy 1,3 I
N
(prądu znamionowego). Moment rozruchowy mierzy się za
pomocą walka skrętnego odczyt dokonywany jest na mierniku momentu połączonego z wałkiem skrętnym.
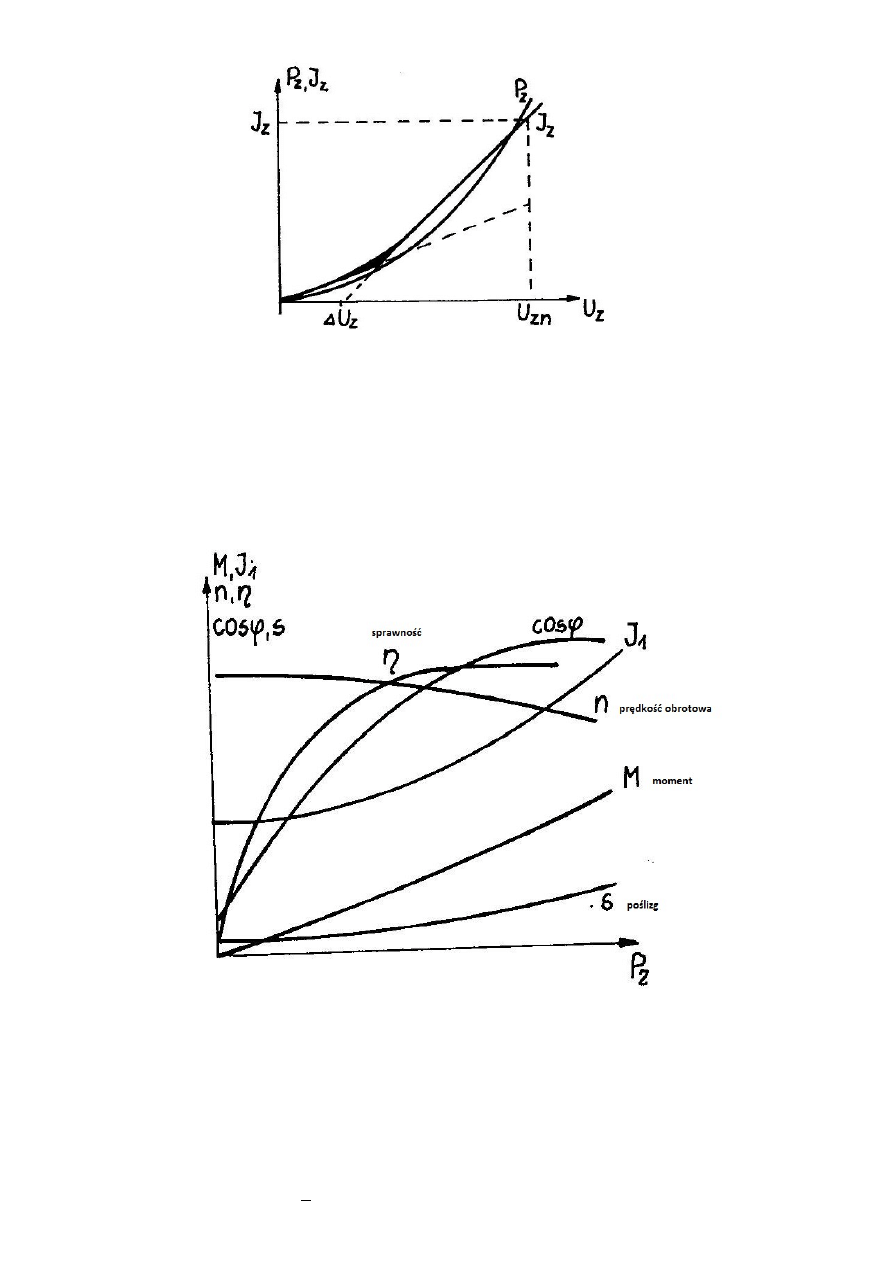
8. Przebiegi teoretyczne ch-k stanu zwarcia silnika indukcyjnego klatkowego:
9. Cel i sposób przeprowadzania pomiarów w stanie obciążenia silnika indukcyjnego klatkowego:
Próba obciążenia służy do poznania właściwości ruchowych silnika na podstawie analizy jego charakterystyk
elektromechanicznych. Dokonuje się pomiarów prądu (I), mocy pobieranej przez silnik (P1), prędkości
obrotowej (n) oraz momentu obrotowego (M) odczytanego z miernika. Obciążeniem jest hamownicza na prąd
stały, regulując jej prąd wzbudzenia zmienia się moment obciążenia silnika. Pomiar wykonuje się w zakresie od
I=Io=0 do I=1,2In. Moc oddawana przez silnik to moc pobierana przez niego pomniejszona o wszystkie straty
(straty w miedzi, w żelazie, mechaniczne).
10. Przebiegi teoretyczne ch-k stanu obciążenia silnika indukcyjnego klatkowego:
11. Wyjaśnić pojęcia prędkość synchroniczna, poślizg, sprawność, moment obrotowy, współczynnik
mocy:
Prędkość synchroniczna to taka gdy poślizg wynosi zero, a wirnik kręci się z prędkością równą prędkości
wirującego pola magnetycznego.
Poślizg - wielkość ta podaje o ile prędkość faktyczna silnika jest mniejsza od prędkości wirującego pola
magnetycznego, czyli silnik asynchroniczny(np. pierścieniowy) nie będzie miał prędkości np.2p= 1500rpm
tylko przykładowo 1440rpm (mniej od prędkości synchronicznej o poślizg).
Sprawność to wyrażony w procentach stosunek mocy oddawane do mocy pobieranej (η=P2[oddawana]/P1).
Moment obrotowy: M = (30/π) * (P2/n).
Współczynnik mocy: cosφ=P1/(
√
3⋅U⋅I
śr
)
Badanie silnika indukcyjnego pierścieniowego:
1. Budowa silnika klatkowego indukcyjnego pierścieniowego:
W żłobkach wirnika jest uzwojenie o liczbie faz i biegunów takiej jak w stojanie. Końcówki połączone w
gwiazdę uzwojenia wirnika przyłączone są do pierścieni ślizgowych wirujących razem z wirnikiem i stąd przez
szczotki wyprowadzone do zacisków. Można zatem włączyć w obwód wirnika zewnętrzną impedancję.
2. Zasada działania silnika indukcyjnego pierścieniowego:
Prąd płynąc przez uzwojenia stojana indukuje siłę elektromotoryczną (strumień magnetyczny Φ), który
wprawia wirnik w ruch obrotowy, obroty wirnika o wartość poślizgu są mniejsze od prędkości strumienia Φ.
3. Jaka jest różnica między silnikiem indukcyjnym klatkowym i pierścieniowym:
Silnik klatkowy, pozbawiony jest szczotek, za to wyposażony w klatkę, nie ma możliwości włączenia
dodatkowej (zewnętrznej) impedancji. Silnik klatkowy jest prostszy i tańszy w konstrukcji, ale jego prędkość
obrotowa jest troszkę niższa.
4. W jaki sposób wyznacza się przekładnię napięciową silnika indukcyjnego pierścieniowego:
Przekładnia napięciowa silnika indukcyjnego określa się jako stosunek napięcia indukowanego w uzwojeniu
stojana E
1
do napięcia indukowanego w uzwojeniu unieruchomionego wirnika E
20
; ϑ = E
1
/ E
20
≈ U
1f
/ U
2fo
.
Wirnik połączony w gwiazdę, mierzy się napięcie i prądy po stronie stojana oraz napięcia po stronie wirnika,
przy zatrzymanym wirniku. Napięcie zasilające reguluje się od 0 do 1,1Un. Następnie dla kilku punktów
pomiarowych wykonuje się obliczenia i wyznacza z nich wartość średnią.
5. Przedstawić sposób wyznaczana ch-ki magnesowania i jej przebieg teoretyczny:
Robi się to podobnie do obliczenia przekładni napięciowej.
Nieruchomy wirnik połączony w gwiazdę mierzy się na nim
wartości napięć, oraz zasilany od 0 to 1,1 Un stojan na którym
mierzy się wartości i prądów i napięć. Dla połączonego w
trójkąt stojana U
1f
= U
1p
dla połączenia w gwiazdę U
1f
= U
1p
/
√
3 . Dla połączenia w gwiazdę wylicza się wartość napięcia
średniego. Z wykresu charakterystyki magnesowania wyznacza
się I
mn
wartość prądu magnesującego dla znamionowego
napięcia.
6. W jaki sposób i jakim celu przeprowadza się próbę biegu jałowego silnika indukcyjnego
pierścieniowego:
Próba biegu jałowego pozwala wyznaczyć straty mocy w rdzeniu i straty mechaniczne. Pozostałe pomiary
potrzebne są do rysowania wykresu kołowego. Próbę przeprowadza się przy zwartych pierścieniach i braku
obciążenia na wale, zasila się silnik z regulowanego źródła napięcia przy stałej prędkości obrotowej. Po
rozruchu silnika mierzy się napięcie międzyfazowe, prąd i moc po stronie stojana regulując napięcie zasilające
od U=1,2 Un do U=0,25Un, bo poniżej 0,25Un obroty szybko spadają.
7. Przedstawić przebieg teoretyczny ch-k biegu jałowego silnika indukcyjnego pierścieniowego:
8. Sposób wyznaczania i przebieg teoretyczny ch-k stanu zwarcia silnika indukcyjnego
pierścieniowego:
Próbę zwarcia wykonuje się w układzie połączeń jak dla biegu
jałowego, lecz wirnik jest unieruchomiony. Sto jan zasila się
regulowanym napięciem począwszy od takiej jego wartości by
prąd
zwarcia w stojanie nie przekraczał 1,3 In, następnie napięcie
zmniejsza się dokonując pomiarów.
9. W jaki sposób można wyznaczyć moment rozruchowy silnika indukcyjnego pierścieniowego?
Podać przebieg teoretyczny ch-ki momentu rozruchowego:
Pomiar przeprowadza się przy zahamowanym wirniku. Można go zahamować
dźwignią długości l która spoczywa na wadze. Regulując napięcie zasilające
od 0 do wartości przy której płynie prąd o wartości znamionowej wyznacza
się moment rozruchowy z: Mr = F * l, gdzie F to siła w newtonach a l to
długość ramienia dźwigni. Można tez użyć wałka skrętnego jak przy silniku
klatkowym.
10. Przedstawić sposób wyznaczania i przebieg teoretyczny ch-k stanu obciążenia silnika
indukcyjnego pierścieniowego:
Metoda obciążenia bezpośredniego:
Silnik obciąża się prądnicą, zasila
napięciem równym znamionowemu, a
obciążenie zmienia się ta, aby prąd silnika
rósł do wartości 1,2In.
Badanie silnika synchronicznego
1. Budowa silnika synchronicznego:
Trójfazowe uzwojenie stojana, wytwarzające magnetyczne pole wirujące. Wirnik wykonany jest w postaci
uzwojenia nawiniętego na rdzeniu i zasilanego, za pośrednictwem pierścieni ślizgowych i szczotek, ze źródła
prądu stałego lub zmiennego. Wirniki cylindryczne (z utajonymi biegunami) lub wirniki z biegunami jawnymi.
Każdy biegun posiada własne uzwojenie nawinięte na rdzeniu bieguna. Poprzez nadawanie odpowiedniego
kształtu nabiegunnikom uzyskuje się odpowiedni rozkład wartości i kierunku pola magnetycznego na obwodzie
wirnika. Wirniki z biegunami jawnymi mają ograniczoną wytrzymałość mechaniczną na siły odśrodkowe,
stosuje się zwykle w maszynach osiągających niezbyt duże prędkości obrotowe. Uzwojenie wzbudzenia
wirnika cylindrycznego umieszcza się w wyfrezowanych w stalowym korpusie żłobkach i zabezpiecza się przed
wypadnięciem ze żłobków za pomocą klinów. Uzwojenie to zajmuje tylko część obwodu wirnika (około 2/3
obwodu). Są droższe od jawnobiegunowych, ale ze względu na dużą wytrzymałość mechaniczną są stosowane
w maszynach osiągających większe prędkości obrotowe.

2. Zasada działania silnika synchronicznego:
Po zasileniu uzwojeń stojana, wytworzone zostanie w nim wirujące pole magnetyczne. Nieobciążony
namagnesowany wirnik ustawi się w osi pola stojana i zacznie wirować wraz z tym polem synchronicznie. Siły
działające między tak przedstawionymi biegunami mają kierunki promieniowe, więc nie dają żadnego momentu
obrotowego. Jeżeli wirnik obciążony zostanie momentem hamującym, spóźni się nieznacznie względem
wirującego pola. W ten sposób oś wirnika nie będzie się już pokrywać z osią stojana, a siły działające między
biegunami wywołają moment mechaniczny, który przeciwstawi się momentowi hamującemu. Zmiany
obciążenia nie powodują zmian prędkości obrotowej wirnika (jak to ma miejsce w silniku asynchronicznym),
lecz opóźnienie wirnika względem wirującego pola, zmianę kąta opóźnienia. Maksymalna wartość kąta
opóźnienia to 60°, powyżej tej wartości silnik wypada z synchronizmu. Wirnik zarówno w stanie jałowym (bez
obciążenia) jak i przy obciążeniu obraca się ze stałą prędkością, równą prędkości wirowania pola
magnetycznego (z prędkością synchroniczną). Jeżeli jednak moment obciążenia będzie większy niż
maksymalny moment elektromagnetyczny silnika, maszyna wypadnie z synchronizmu wirnik będzie okresowo
hamowany i przyspieszany i po pewnym czasie zatrzyma się.
3. Wyjaśnić, dlaczego maszyna synchroniczna w klasycznej postaci nie posiada początkowego
momentu rozruchowego:
Silnik synchroniczny wyposażony jest zwykle w trójfazowe symetrycznie rozmieszczone na obwodzie stojana
uzwojenie prądu przemiennego. Uzwojenie to zasilane trójfazowym symetrycznym napięciem przemiennym
wytwarza strumień wirujący. Uzwojenie wzbudzenia zasilone prądem stałym wytwarza stały strumień
nieruchomy w stosunku do wytwarzającego go uzwojenia wirnika. Moment elektromagnetyczny wynikający z
wzajemnego oddziaływania strumieni wirującego i stałego jest momentem sinusoidalnie zmiennym o
częstotliwości odpowiadającej częstotliwości sieci. Wirnik zacznie wirować dopiero w wyniku współdziałania
pola twornika i pola wzbudzenia, konieczne jest aby prędkość wirowania pól względem siebie różniła się
niewiele, ponieważ wtedy okres zmian momentu elektromagnetycznego jest duży i działający w czasie
półokresu moment w kierunku wirowania wirnika potrafi doprowadzić go do prędkości synchronicznej. Wynika
z tego, że aby silnik synchroniczny mógł ruszyć, należy doprowadzić do stanu, w którym pola wirnika i
twornika będą względem siebie nieruchome lub będą wirować z pewną nieznaczną prędkością. Wymaga to
stosowania dodatkowego urządzenia lub wprowadzenia zmian w konstrukcji silnika, np. instalacja klatki
rozruchowej. Jest to dość znacząca wada.
4. Na czym polega rozruch silnika synchronicznego za pomocą obcej maszyny:
Istota tej metody polega na synchronizacji lub samo synchronizacji. Rolę maszyny napędzającej może spełniać:
dodatkowy silnik asynchroniczny, silnik prądu stałego (wymagane źródło prądu stałego), wzbudnica na wale
maszyny, jednak na ogół jest zbyt mała i nie rozwinie odpowiedniego momentu. Metody te są kłopotliwe, bo
wymagają dodatkowej maszyny lub zwiększenia wymiarów silnika, więc rzadko się je stosuje.
5. Na czym polega rozruch częstotliwościowy silnika synchronicznego:
Metoda wymaga posiadania dodatkowej maszyny (prądnicy synchronicznej). Uruchomiony silnik zasila się z
prądnicy, której prędkość obrotowa oraz częstotliwość zwiększa się powoli od zera do prędkości
synchronicznej. Jeżeli uzwojenie stojana silnika zasilimy z tej prądnicy (przy włączonym wzbudzeniu), to przy
powolnym uruchamianiu prądnicy i stopniowym zwiększaniu jej prędkości, wirnik silnika nadążać będzie za
wirnikiem prądnicy. Po osiągnięciu znamionowej prędkości obrotowej odpowiadającej częstotliwości w sieci,
włącza się cały zespół do sieci (synchronizacja), po czym może nastąpić odłączenie prądnicy rozruchowej.
6. Na czym polega rozruch asynchroniczny silnika synchronicznego:
Jest to najprostsza metoda, silnik wyposaża się w klatkę rozruchową, której pręty umieszcza się w
nabiegunnikach magneśnicy. Rozruch odbywa się wtedy jak w zwartym silniku asynchronicznym. Rolę
uzwojenia rozruchowego może pełnić także uzwojenie tłumiące lub lite nabiegunniki połączone pierścieniami.
Przy rozruchu asynchronicznym niewzbudzony silnik może być włączony bezpośrednio na napięcie sieci lub
też celem zmniejszenia prądu rozruchowego za pośrednictwem autotransformatora.
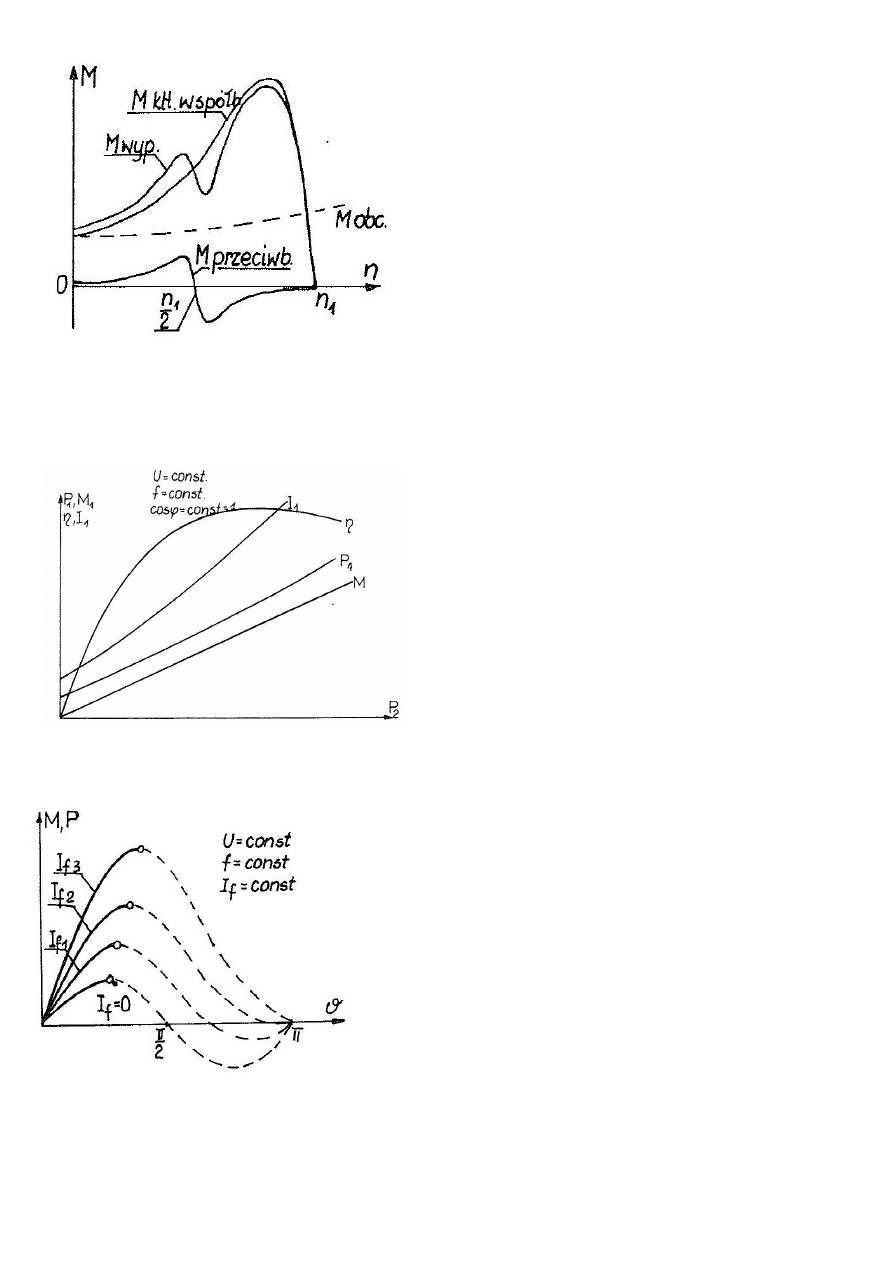
7. Wyjaśnić, na czym polega efekt Görges'a. Przedstawić interpretację graficzną:
Efekt Görges'a :
Początek rozruchu asynchronicznego silnika synchronicznego
wiąże się z niebezpieczeństwem przepięć. Aby ich uniknąć,
należy na czas rozruchu należy zewrzeć przez rezystor rzędu
pięcio- do dziesięciokrotnej wartości rezystancji uzwojenia
wzbudzenia. Zastosowanie oporów mniejszych lub też zwarcie
uzwojenia wzbudzenia na pierścieniach obniżyłoby wprawdzie
jeszcze bardziej napięcie, lecz mogłoby odbić się niekorzystnie
na przebiegu momentu rozruchowego. Wytworzony zbyt duży
moment przeciwbieżny możne być przyczyną powstania zbyt
dużego spadku rozruchowego momentu wypadkowego przy
prędkości równej 0,5 synchronicznej (siodło). W związku z tym
przy odpowiednio dużym momencie obciążenia w czasie
rozruchu możne nastąpić ustalenie prędkości napędu n = 0,5 n
1
.
Zjawisko zwane jest zjawiskiem Gorgesa. Po osiągnięciu przez
silnik podczas rozruchu prędkości zbliżonej do prędkości synchronicznej w obwód wzbudzenia włącza się prąd
wzbudzenia I
f
= I
fn
w tych warunkach silnik wejdzie w synchronizm.
8. W jaki sposób wyznacza się ch-ki elektromechaniczne silnika synchronicznego i jaki jest ich
przebieg teoretyczny:
Są zależnością prądu I, mocy pobieranej P
1
sprawności η i
momentu M w funkcji mocy użytecznej P
2
przy stałym
napięciu zasilani U=const, stałej częstotliwości sieci f=const,
oraz stałym współczynniku mocy cosφ=1. Należy po
włączeniu silnika do sieci tak regulować prąd wzbudzenia,
aby uzyskać minimalny prąd stojana dla danej mocy czynnej
obciążenia. W ćwiczeniu jest to prądnica prądu stałego,
zmianę obciążenia silnika uzyskuje się zmieniając prąd
wzbudzenia prądnicy jeśli pracuje ona na stały rezystor.
Pomiary wykonuje się zmieniając moc obciążenia silnika (P
2
)
w zakresie 0 do 1,2 P
n
.
9. W jaki sposób wyznacza się ch-ki kątowe silnika synchronicznego i jaki jest ich przebieg
teoretyczny:
Jest to zależność mocy elektromechanicznej lub momentu
elektromagnetycznego od kąta mocy: P, M = f(ϑ). Pomiaru dokonuje
się dla kilku różnych wartości prądu wzbudzenia oraz przy stałym
napięciu zasilania i stałej częstotliwości. Moment oblicza się z
zależności M = P
2
/ ω = 9,55 * (P
2
/ n
1
) [Nm]
10. W jaki sposób wyznacza się moment maksymalny silnika synchronicznego i jak można wpływać
na jego wartość:
Przy nastawionej wartości prądu wzbudzenia pracującego silnika synchronicznego, zwiększa się stopniowo
obciążanie aż do chwili wypadnięcia z synchronizmu. W chwili tej odczytuje się moc i kąt mocy ϑ. Pomiary
powtarza się dla różnych wartości prądu wzbudzenia np. I
f1
= 0, I
f2
= 1/4I
fN
, If3 = ½I
fN
, I
f4
= I
fN
. Maksymalny
moment dla I
f
= 0 występuje przy kącie ϑ = π/4. Przy dalszych pomiarach zwiększając prąd wzbudzenia,
moment maksymalny zwiększa się i występuje przy większych od π/4 kątach. ϑ є (π/4 , π/2).
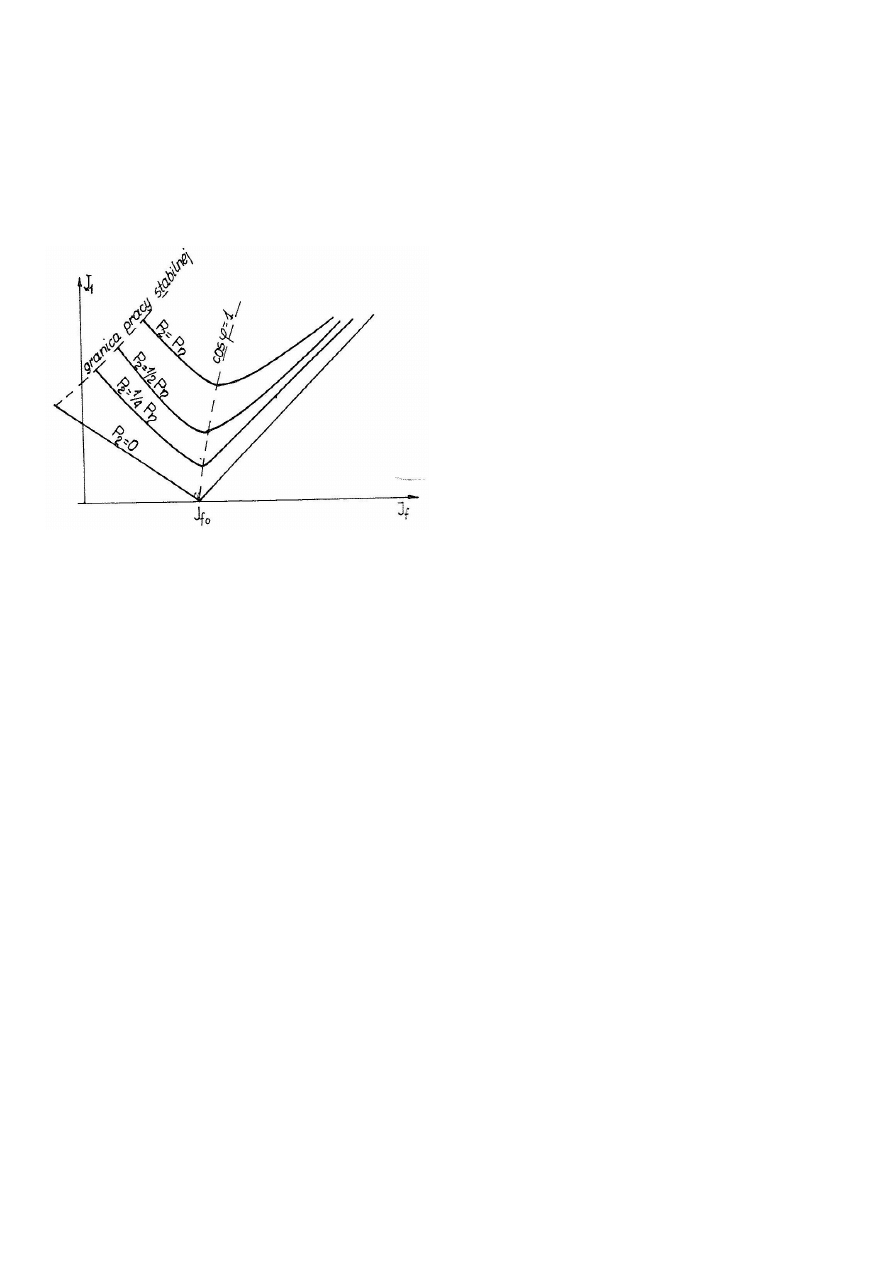
11. W jaki sposób wyznacza się krzywe „V” silnika synchronicznego i jaki jest ich przebieg
teoretyczny:
Inaczej są to charakterystyki regulacyjne. Są zależnością
prądu obciążania I
1
od prądu wzbudzenia I
f
, przy stałym
napięciu U, stałym obciążeniu na wale P
2
i stałej
częstotliwości. Rodzinę tych krzywych należy pomierzyć
w czasie biegu jałowego i przy różnych obciążeniach
(P
2
=0, P
2
= ¼ P
n
, P
2
= ½ P
n
, P
2
= P
n
).
12. W jaki sposób można wpływać na charakter mocy biernej pobieranej z sieci sztywnej przez silnik
synchroniczny:
Wartość prądu I
1
pobieranego przez silnik z sieci zależny od momentu obciążenia i wartości prądu I
f
.
Najkorzystniej dla silnika synchronicznego jest taka wartość prądu wzbudzenia, przy której prąd obciążania jest
najmniejszy. Silnik pracuje wtedy przy cosφ = 1. W tym stanie pracy moc elektryczna pobierana przez silnik z
sieci jest najmniejsza, zatem i straty w uzwojeni stojana najmniejsze. Krzywa określona przez zbiór punktów
odpowiadających minimum prądu (cosφ = 1) przy dowolnych obciążeniach, pokaże obszar na lewo od niej
odpowiadający obciążaniu indukcyjnemu (maszyna niedowzbudzona), a na prawo będzie obszar obciążenia
pojemnościowego (maszyna prze-wzbudzona), kiedy to silnik dostarcza mocy biernej indukcyjnej potrzebnej do
wytworzenia pól elektromagnetycznych w silnikach asynchronicznych. Praca przy prze-wzbudzaniu silników
synchronicznych zwłaszcza dużej mocy jest korzystna, jeżeli w sąsiedztwie pracują silniki asynchroniczne.
Nieużyteczna moc bierna nie musi być wówczas sprowadzana z elektrowni bo jest wytwarzana na miejscu.
Zwiększa to przepustowość dla mocy czynnej (użytecznej) elektrowni i urządzeń przemysłowo-rozdzielczych
oraz maleją straty mocy w liniach zasilających.
Badanie prądnicy synchronicznej:
1. Zasada działania prądnicy synchronicznej:
Na wirniku umieszczona jest tzw. cewka wzbudzająca, przez którą płynie prąd stały doprowadzany z
zewnętrznego źródła. Prąd ten wytwarza stałe pole magnetyczne w wirniku, stanowiącym elektromagnes. Obrót
wirnika (a więc i pola magnetycznego) powoduje zmianę strumienia pola magnetycznego przenikającego przez
uzwojenie stojana i na zasadzie zjawiska indukcji elektromagnetycznej powoduje indukowanie się napięcia
przemiennego w uzwojeniach stojana, pod wpływem którego płynie prąd przemienny o przebiegu
sinusoidalnym. Dla uzyskania odpowiedniej częstotliwości napięcia wirnik musi obracać się z odpowiednią
prędkością, w celu regulacji napięcia zmienia się natężenie prądu wzbudzającego. Nazwa prądnicy
synchronicznej wynika z synchronizmu prędkości obrotowej wirnika i pola magnetycznego maszyny. Pole
magneśnicy i twornika wiruje w tym samym kierunku i z taką samą prędkością. Niemal wszystkie urządzenia
wytwarzające prąd przemienny są prądnicami synchronicznymi.
2. Budowa prądnicy synchronicznej:
Prądnice te składają się ze stojana, który stanowi zewnętrzną, statyczną część maszyny. Na obwodzie stojana
umieszczone są uzwojenia (cewki), w których indukuje się napięcie przemienne, pod wpływem którego płynie
prąd przemienny. Wytwarzany prąd może być jedno- lub wielofazowy (najczęściej trójfazowy) - zależy to od
liczby uzwojeń. Natomiast wewnątrz stojana znajduje się wirnik wykonany w postaci rdzenia magnetycznego,
który stanowi dynamiczny element maszyny. Wirnik jest osadzony na wale, który w przypadku pracy
prądnicowej połączony jest z urządzeniem napędzającym.
Prądnica synchroniczna prądu przemiennego może być używana jako silnik synchroniczny.
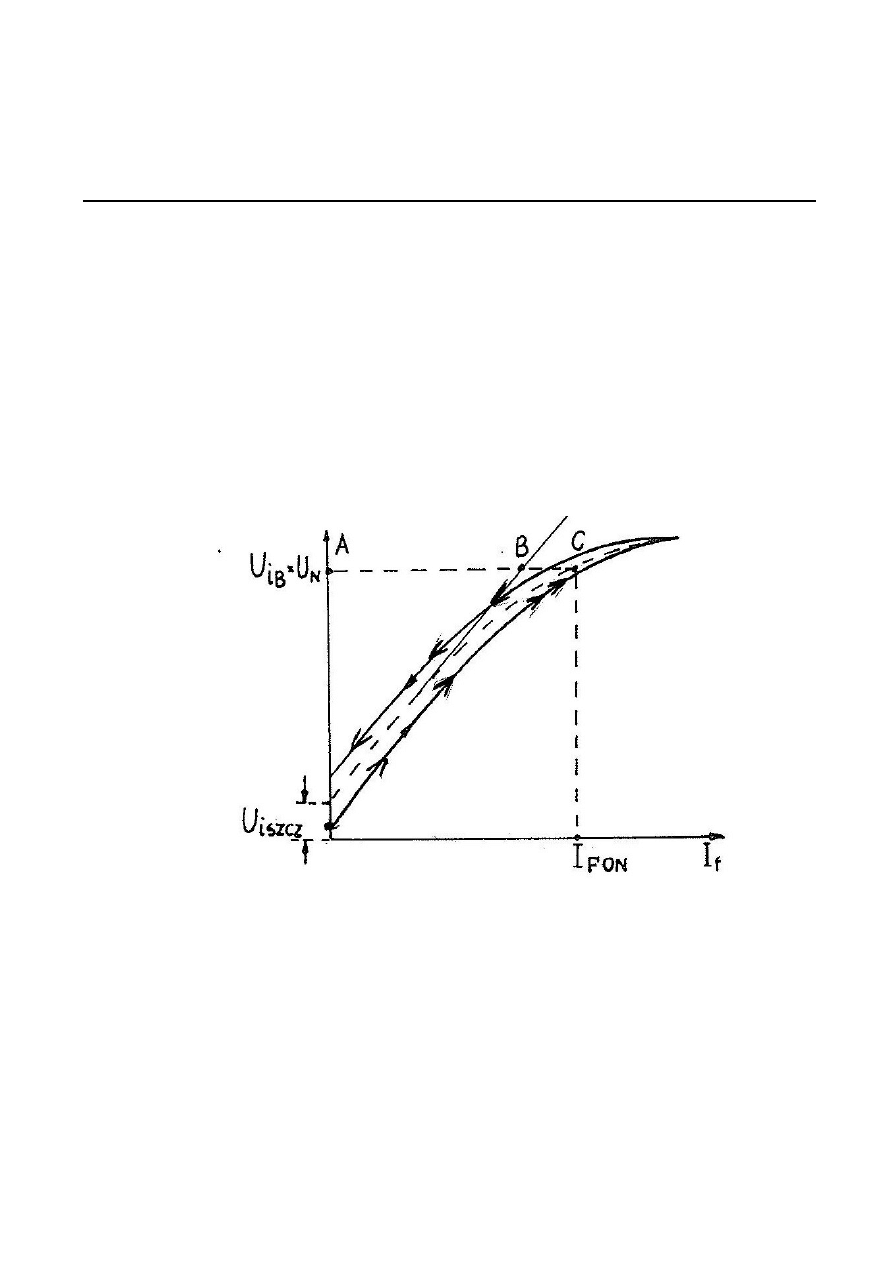
3. Sposób wyznaczenia ch-ki biegu jałowego prądnicy synchronicznej:
Wyznacza się: charakterystykę biegu jałowego, prąd wzbudzenia biegu jałowego przy napięciu znamionowym I
fon
oraz jego składowe,
symetrię napięć. Bieg jałowy prądnicy charakteryzuje jedynie prąd wzbudzenia If dający przepływ Θ
f
. Prąd twornika wynosi I=0, a
napięcie U=E. Przepływ Θ
f
wytwarza strumień Φ
f
. Strumień z kolei wytwarza na zaciskach rozwartego uzwojenia stojana napięcie U
if
proporcjonalne do tego strumienia. Pomiar pozwala na wyznaczenie charakterystyk magnesowania, wyznaczenia strat jałowych,
kształtu krzywej napięcia oraz na sprawdzenie symetrii napięć.
Charakterystyka przedstawia zależność U
if
= f(I
f
) przy n=const I=0. Prądnica napędzana jest silnikiem prądu
stałego, regulując wzbudzenie silnika należy ustawić znamionowe obroty prądnicy. Potem przy zerowej
wartości prądu wzbudzenia prądnicy odczytuje się wartość szczątkowego napięcia. Pomiar należy wykonać od
wartości szczątkowej SEM aż do U
ifmax
= 1,3 U
N
. Ze względu na histerezę należy ponowić pomiar zmniejszając
napięcie od maksimum uzyskanego z powrotem do 0, a do wykreślenia charakterystyki obliczyć wartość
średnią z mierzonych napięć międzyfazowych.
4. Przebieg teoretyczny ch-ki biegu jałowego prądnicy synchronicznej:
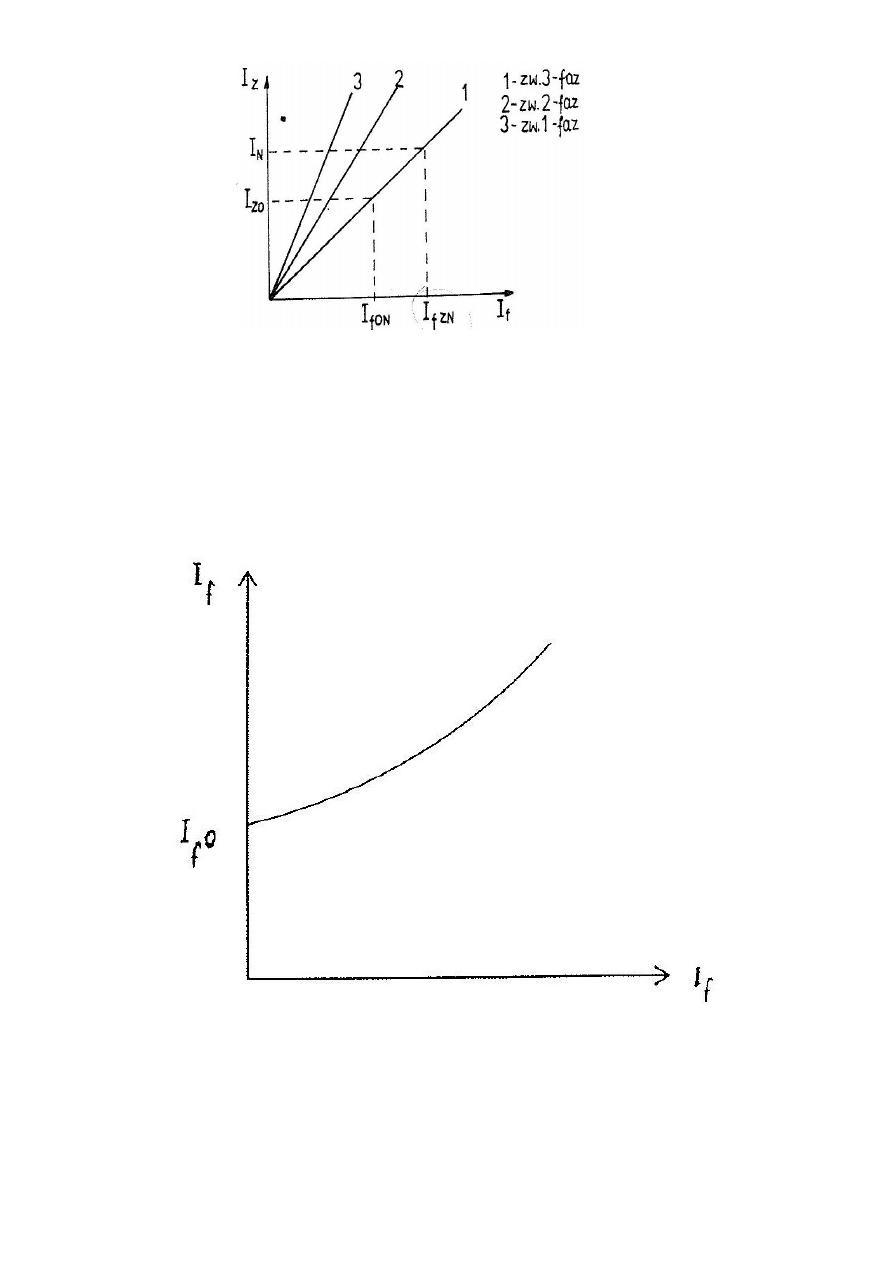
5. Sposób wyznaczenia ch-ki zwarcia 1-, 2-, 3-fazowego prądnicy synchronicznej:
Próbę zwarcia symetrycznego (3-fazowego) przeprowadza się przy zwartych zaciskach badanej maszyny,
napędzanej ze stałą prędkością. Mierzy się zależność Iz = f (I
f
) przy stałej prędkości równej znamionowej.
Reguluje się prąd wzbudzenia od ustalonej Iw = 1,3 I
f
do I
fn
= 0. Prąd zwarciowy zależy od prądu wzbudzenia,
w badaniu utrzymuje się prąd wzbudzenia na małych wartościach wtedy prąd zwarcia nie przekracza 0,5 do 1,5
prądu znamionowego.
Zwarcie 2-fazowe jest gdy dwie fazy twornika zwiera amperomierz. Wzbudzona prądnica wiruje z prędkością
synchroniczną, zwiększając prąd wzbudzenia I
f
od 0 do 0,3 I
wn
mierzy się prąd zwarcia.
Zwarcie 1-fazowe koniec jednej fazy zwiera się z punktem zerowym układu, prądnica wiruje z prędkocią bliską
synchronicznej należy zwiększać prąd wzbudzenia od 0 do 0,3 I
fn
mierząc jednocześnie wartość prądu
zwarciowego. Zmniejszające się działanie twornika sprawia, że tym mniejszej ilości faz jest zwarcie tym
charakterystyka jest bardziej stroma.
6. Przebieg teoretyczny ch-ki zwarcia 1-, 2-, 3-fazowego prądnicy synchronicznej:
7. Sposób wyznaczaniach-ki regulacji prądnicy synchronicznej:
Jest to zależność prądu obciążenia od prądu wzbudzenia przy stałym cosφ, stałej prędkości obrotowej i stałej
wartości napięcia na zaciskach prądnicy. Przy zmianach obciążenia przy stałej wartości cosφ następuje wzrost
lub spadek napięcia na zaciskach prądnicy, należy to napięcie regulować poprzez regulację prądu wzbudzenia
prądnicy. Prądnica musi osiągnąć obroty znamionowe, a następnie wzbudza się do napięcia znamionowego.
Obciążeniem jest opornik wodny z możliwością regulacji, co zapewni stałą wartość cosφ = 1. Utrzymując stałe
napięcie na zaciskach prądnicy obciąża się od I = 0 do I = 1,2 I
f
.
8. Przebieg teoretyczny ch-ki regulacji prądnicy synchronicznej:
9. Sposób wyznaczania ch-ki zewnętrznej prądnicy synchronicznej:
Zależność napięcia na zaciskach prądnicy od prądu przepływającego przez twornik przy stałych obrotach,
wzbudzeniu i stałym współczynniku mocy cosφ. W ćwiczeniu cosφ =1. Prądnica nepędzona do prędności
synchronicznej, a następnie wzbudzana do napięcia U = Un. Należy tak obciążać prądnice opornica wodną, aby
uzyskać zmiany prądu obciążenia od I = 0 do I = I
n
. Otrzyma się w ten sposób część charakterystyki
zewnętrznej przy obciążeniu prądnicy. Należy ten sam pomiar powtórzyć dla obciążenia prądnicy przy prądzie
I= I
n
ustalić napięcie U= Un, a następnie zmniejszyć obciążenie aż do I = 0.
10. Przebieg teoretyczny ch-ki zewnętrznej prądnicy synchronicznej:
11. Wyjaśnić pojęcie zmienności napięcia:
Silnik szeregowy prądu stałego:
1. Budowa silnika szeregowego prądu stałego:
Silnik elektryczny prądu stałego zbudowany jest z dwóch magnesów zwróconych do siebie biegunami
różnoimiennymi, tak aby pomiędzy nimi znajdowało się pole magnetyczne w wirniku. Pomiędzy magnesami
znajduje się przewodnik w kształcie ramki podłączony do źródła prądu poprzez komutator i ślizgające się po
nim szczotki. Przewodnik zawieszony jest na osi, aby mógł się swobodnie obracać.
2. Zasada działania silnika szeregowego prądu stałego:
Na ramkę, w której płynie prąd elektryczny, działa para sił elektrodynamicznych z powodu obecności pola
magnetycznego. Siły te powodują powstanie momentu obrotowego. Ramka wychyla się z położenia
poziomego, obracając się wokół osi. W wyniku swojej bezwładności mija położenie pionowe (w którym
moment obrotowy jest równy zero a szczotki nie zasilają ramki). Po przejściu położenia pionowego ramki,
szczotki znów dotykają styków na komutatorze, ale odwrotnie, prąd płynie w przeciwnym kierunku, dzięki
czemu ramka w dalszym ciągu jest obracana w tym samym kierunku.
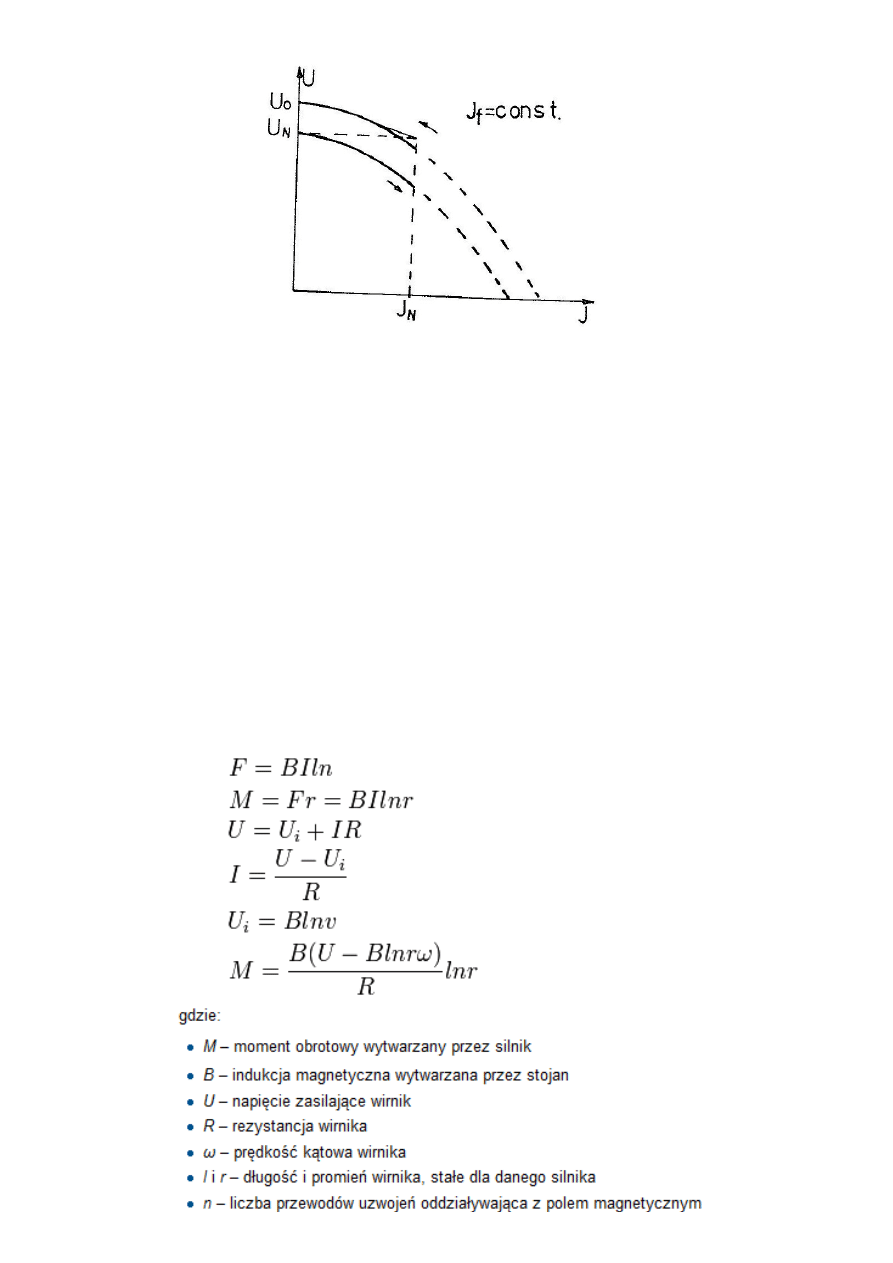
3. Podać zależność na prędkość obrotową i moment silnika prądu stałego:
4. W jaki sposób można regulować prędkość obrotową silnika szeregowego prądu stałego:
Obroty będą rosły, gdy zwiększymy U (napięcie zasilające silnik), i/lub zmniejszając strumień wzbudzenia Φf,
będzie on mniejszy, jeśli zmniejszy się prąd wzbudzenia (Iw).
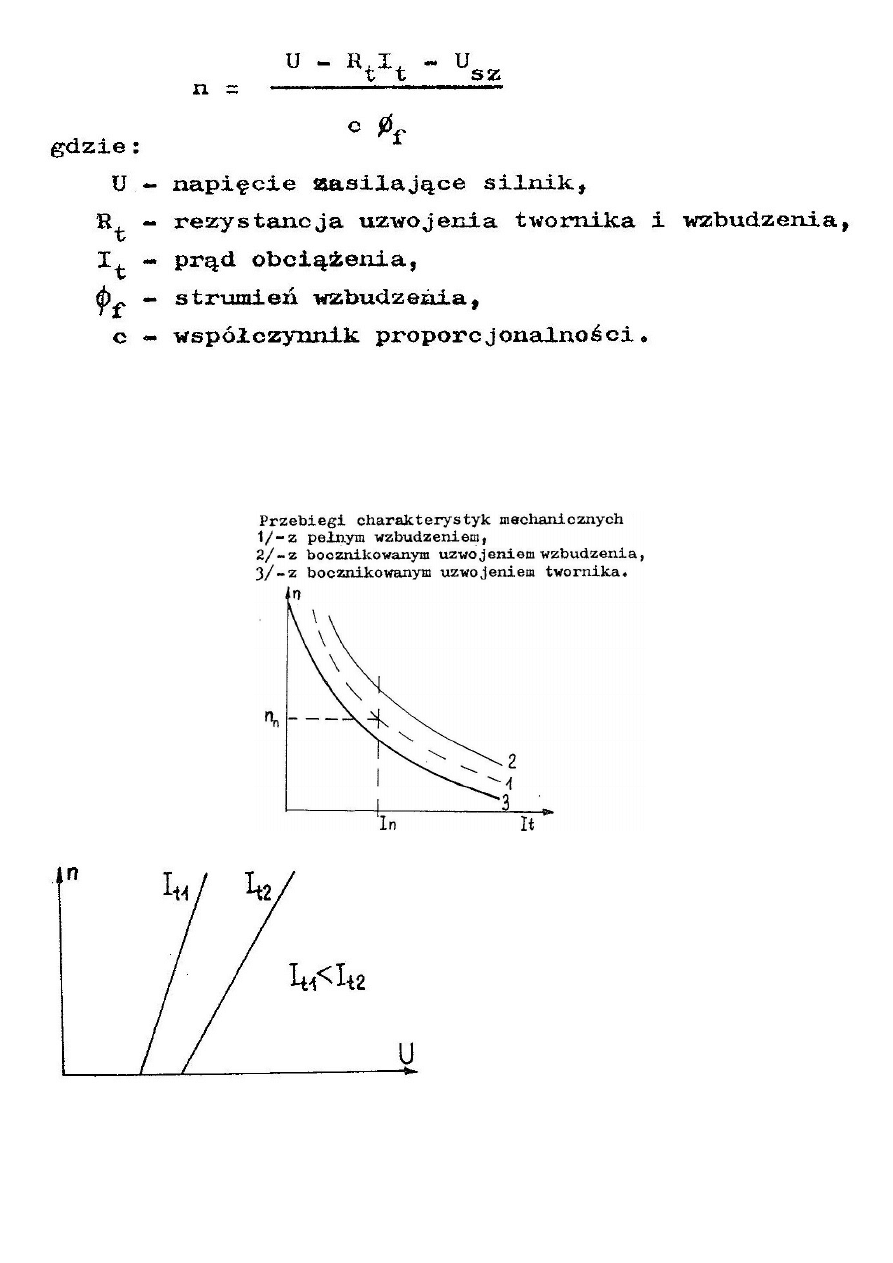
5. Przedstawić przebiegi ch-k mechanicznych silnika szeregowego prądu stałego pracującego z
pełnym wzbudzeniem, z bocznikowanym uzwojeniem wzbudzenia i z bocznikowanym uzwojeniem
twornika:
6. Sposób wyznaczenia i przebieg ch-ki regulacji silnika szeregowego prądu stałego:
Charakterystyka regulacji silnika szeregowego n = f (U)
przedstawia zależność prędkości obrotowej (n) od napięcia
zasilającego przy stałej wartości momentu obciążenia
(I
t
=const). Regulacja za pomocą zmiany napięcia
zasilającego jest najczęściej spotykaną metodą regulacji
prędkości obrotowej w silnikach szeregowych. Przy stałym
momencie obciążenia zależność n = f (U) jest linią prostą.
Pomiary przeprowadza się, zasilając silnik z regulowanego
źródła napięcia dla kilku ustalonych wartości prądu
obciążenia, np. I
t
= ( 0,5 ; 0,75 ; 1 ) I
tn
.
7. Sposób wyznaczenia i przebieg ch-ki biegu jałowego silnika szeregowego prądu stałego:
Pozwala określić straty w żelazie, jest to zależność napięcia
indukowanego w tworniku U
0
= f (I
f
). Silnik nie może pracować
bez obciążenia, to charakterystykę wyznacza się w układzie
obcowzbudnym. Uruchamia się silnik zasilając najpierw obwód
wzbudzenia prądem I
f
równym znamionowemu. Twornik
należy zasilić z regulowanego źródła napięcia. Po dokonaniu
rozruchu silnika pomiary rozpoczyna się od wartości U = 1,3
Un, a prąd wzbudzenia reguluje się w ten sposób, aby przy
danym napięciu obroty były znamionowe. Następnie obniża się
prąd wzbudzenia do wartości przy której prędkość jest
znamionowa. Ze względu na histerezę należy prąd wzbudzenia
regulować jednokierunkowo. Można tak zmierzyć jedynie część
charakterystyki, dla małych prądów wzbudzenia nie można
utrzymać znamionowej prędkości, ponieważ moment elektromagnetyczny wytwarzany przez silnik jest
niewielki i nie wystarcza na pokonanie momentu oporowego. Ponieważ wartość prądu wzbudzenia, przy której
występuje to zjawisko jest niewielka i odpowiada prostoliniowej części charakterystyki, brakującą część
wykreśla się metodą ekstrapolacji (linia przerywana).
Napięcie indukowane w tworniku: U
0
= U – R
t
I
t
– U
sz
gdzie U – napięcie zasilające twornik, R
t
- rezystancja twornika, I
t
- prąd twornika, U
sz
- spadek napięcia na
szczotkach (1,8 do 2 V).
Jeżeli w czasie pomiarów nie można utrzymać prędkości znamionowej, trzeba U
0
przeliczyć wzorem:
U
0
= U
op
* (n
n
/ np.).
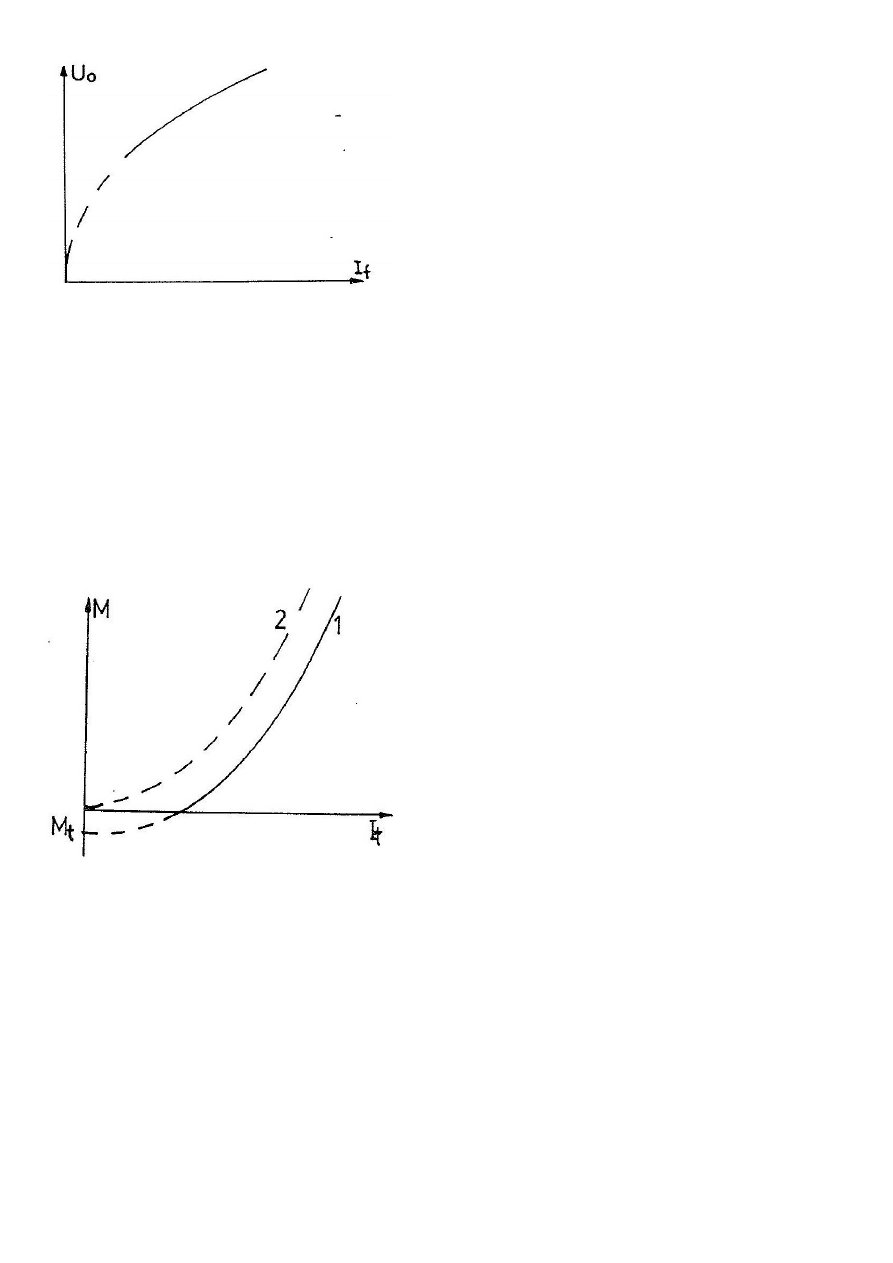
8. Sposób wyznaczenia i przebieg się ch-ki momentu rozruchowego silnika szeregowego prądu
stałego:
Zależność momentu rozruchowego od prądu twornika. Trzeba
zahamować wirnik dźwignią długości l wspartą końcem na
wadze. Zasila się silnik regulowanym źródłem niskiego
napięcia, ze względu na to, że w zahamowanym wirniku
napięcie rotacji wynosi zero i prąd twornika ogranicza jedynie
rezystancja obwodu. Prąd reguluje się w zakresie 0,2 do 1,3 In.
Moment rozruchowy Mr = F * l ; gdzie F – siła działająca na
dźwignię [N], l – długość ramienia dźwigni [m]. Początkowy
odcinek charakterystyki ma kształt paraboliczny, ponieważ dla
małych prądów, a więc i małych nasyceń obowiązuje
zależność: Mr = c
1
* I
t
2
. Natomiast ze wzrostem prądu wzrasta
nasycenie i charakterystyka staje się prostoliniowa, wówczas:
Mr = c
2
* I
t
. Aby otrzymać charakterystykę momentu
elektromagnetycznego, wytwarzanego przez silnik, należy do
charakterystyki wyznaczonej z pomiarów (krzywa 1) dodać wartość momentu strat od tarcia statycznego M
t
(krzywa 2).
Prądnica szeregowogo-bocznikowa prądu stałego:
1. Budowa i zasada działania prądnicy prądu stałego:
Każda maszyna prądu stałego składa się z trzech zasadniczych zespołów: twornika, magneśnicy, urządzenia
szczotkowego. Twornik jest tu zespołem wirującym, czyli wirnikiem, natomiast magneśnica zespołem
spoczynkowym, czyli stojanem. Magneśnica składa się z jarzma odlewanego z żeliwa. Do wnętrza jarzma
przytwierdzone są uzwojone bieguny główne i pomocnicze. Twornik składa się z rdzenia wykonanego z pakietu
blach, uzwojenia twornika umieszczonego w żłobkach rdzenia oraz komutatora, do którego wlutowane są końce
uzwojenia. Urządzenie szczotkowe składa się z tzw. mostu szczotkowego z trzonami szczotkowymi, na których
są osadzone trzymadła szczotkowe. Maszyna szeregowo-bocznikowa jest prądnicą samowzbudną, czyli nie
wymaga zasilenia uzwojenia wzbudzającego z obcego źródła. Samowzbudzenie odbywa się dzięki istnieniu
magnetyzmu szczątkowego, jako pozostałości po poprzedniej pracy, które przy napędzeniu wirnika indukuje w
jego uzwojeniu napięcie (szczątkowe) E
sz
. Pod wpływem tego napięcia w uzwojeniu wzbudzającym płynie prąd
I
f
, który wytwarza strumień magnetyczny. Jeżeli kierunek tego strumienia jest zgodny z kierunkiem strumienia
szczotkowego, to strumień w maszynie ulega zwiększeniu, wzrasta napięcie indukowane i prąd wzbudzenia, co
powoduje dalszy wzrost strumienia aż maszyna wzbudzi się do pełnego napięcia. W maszynie szeregowo-
bocznikowej uzwojenie wzbudzające składa się z dwóch części: podstawowego uzwojenia bocznikowego i
uzwojenia szeregowego o małej liczbie zwojów. Przeważnie stosuje się połączenie szeregowo-bocznikowe
zgodnie, w którym przepływ uzwojeń wzbudzających się sumuje, niekiedy stosuje się połączenie przeciwne, w
których uzwojenie szeregowe swoim przepływem osłabia strumień wytwarzany przez uzwojenie bocznikowe.
W prądnicy poprzez odpowiedni dobór liczb zwojów uzwojenia szeregowego zgodnego można uzyskać taki
wzrost strumienia ze wzrostem prądu obciążenia, że napięcie na zaciskach pozostaje prawie stałe. Maszyna
pracująca jako silnik o do-zwojeniu zgodnym nie rozbiega się w stanie jałowym i posiada duży moment
rozruchowy. Prądnica szeregowo-bocznikowa wiąże zalety prądnicy bocznikowej oraz szeregowej. Podczas
wzbudzenia oraz stabilnej pracy główny wpływ na strumień magnesujący posiada uzwojenie bocznikowe.
Dzięki jego wykorzystaniu - tak samo jak w prądnicy bocznikowej - ewentualne jest ustawienie napięcia biegu
jałowego i płynną regulacje napięcia na zaciskach obciążonego urządzenia. Uzwojenie szeregowe wpływa na
zwiększenie się przepływu wzbudzenia wraz ze wzrostem obciążenia. Wypadkowy strumień wzbudzenia jest
sumą strumieni obu uzwojeń:
Φw = Λd ( Θwb +/- Θws)
Gdzie: Λd - przewodność obwodu magnetycznego w osi d - prostopadłej do osi szczotek, Θwb - przepływ
uzwojenia bocznikowego, Θws - przepływ uzwojenia szeregowego. Znak +/- uzależniony jest od tego czy
przepływy z obu uzwojeń posiadają zgodny czy przeciwny zwrot. Jeżeli chodzi o przepływy godne zmienność
napięcia może wynosić 0 albo nawet mieć wartość ujemną w porównaniu z zmiennością napięcia w prądnicy
bocznikowej, kiedy przepływy są przeciwne zmienność napięcia jest o wiele większa. Napięcie oraz prąd na
zaciskach urządzenia ma taką o to wartość: U = E - (Rws + Rp + Rt)It - ΔUsz
;
It = I + Iwb
Gdzie: U - napięcie na zaciskach maszyny, E - wartość indukowanej siły elektromotorycznej, Rws - rezystancja
szeregowego uzwojenia wzbudzenia, Rwb - rezystancja bocznikowego uzwojenia wzbudzenia, Rp - rezystancja
uzwojeń dodatkowych i doprowadzeń w obwodzie twornika, It - prąd twornika, Iwb - prąd w bocznikowym
uzwojeniu wzbudzenia, I - prąd obciążenia. Zasadę działanie prądnicy prądu stałego da się bardzo prosto
wytłumaczyć na zasadzie przewodnika przemieszczającego się w niezmiennym w czasie polu magnetycznym.
Kiedy wirnik urządzenia pod wpływem zewnętrznego momentu napędowego wiruje w uzwojeniu twornika
indukuje się siła elektromotoryczna (tzw. siła elektromotoryczna rotacji) która ma wartość: e= B lw v
Gdzie: B - największa wartość indukcji, lw- całkowita długość przewodów przemieszczających się w polu
magnetycznym, v - prędkość liniowa przewodów.
Napięcie na zaciskach urządzenia jest sumą sił elektromotorycznych za indukowanych w kolejnych cewkach
wirnika które połączone są szeregowo. Osie cewek są wzajemnie przesunięte w przestrzeni oraz wszystkie z
nich są w innych warunkach magnetycznych, w związku z tym napięcie na zaciskach twornika jest sumą
wartości chwilowych sił elektromotorycznych indukowanej we wszystkich cewkach. Wartość siły
elektromotorycznej, jaka będzie indukowana w uzwojeniu twornika będzie wynosiła: E = k Φ n
Gdzie: Φ - strumień magnetyczny wzbudzenia, n - prędkość obrotowa wirnika [obr/min], k = N p / a 60 - stała
konstrukcyjna urządzenia. Podczas pracy prądnicowej napięcie na zaciskach urządzenia U jest mniejsze od siły
elektromotorycznej o wielkość spadków napięć na wszelkich fragmentach obwodu: U = E - It Rt
Gdzie: It - prąd twornika, Rt - całkowita rezystancja obwodu twornika.
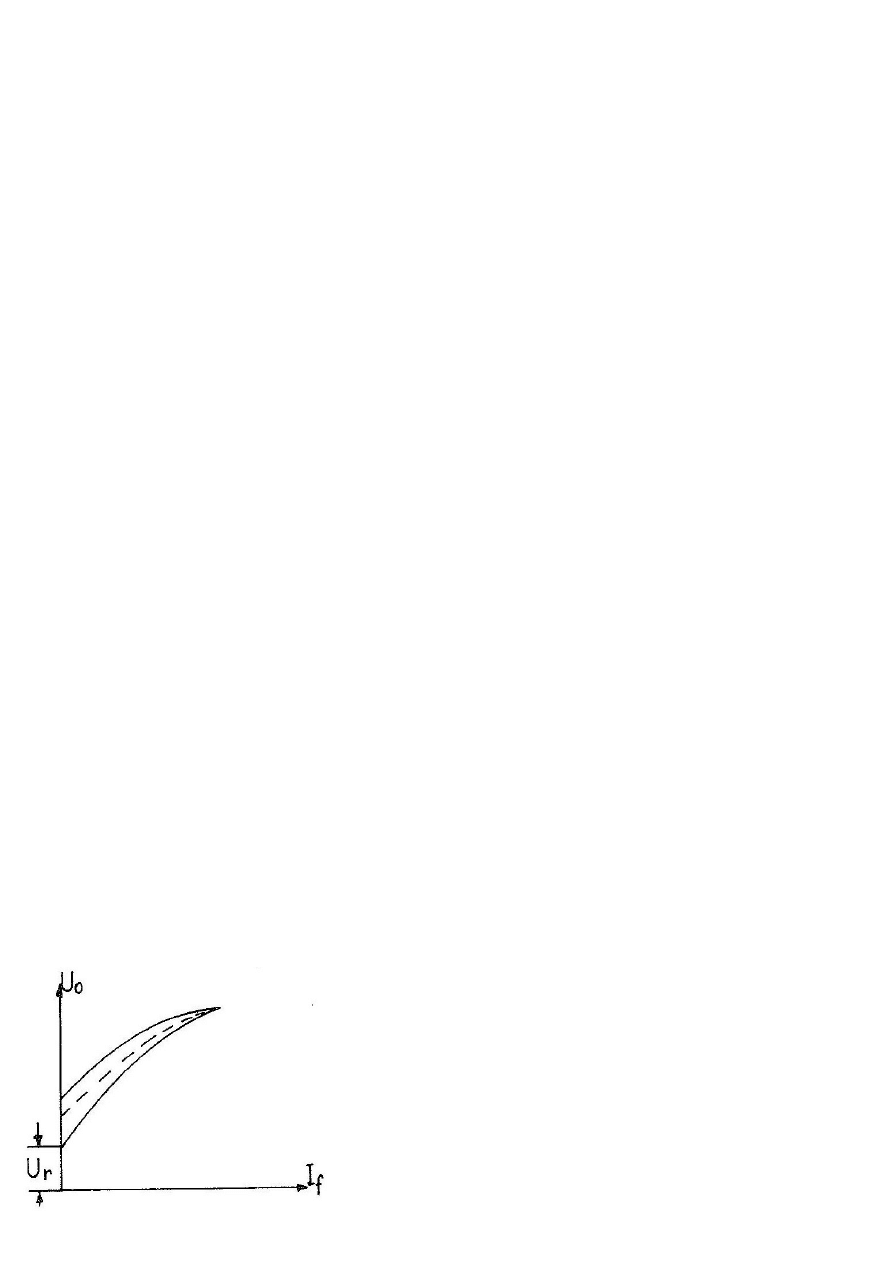
2. W jaki sposób wyznacza się ch-kę biegu jałowego prądnicy prądu stałego i jaki jest jej przebieg
teoretyczny:
Zależność napięcia indukowanego w uzwojeniu twornika w funkcji
prądu wzbudzenia I
f
, dla prądnicy nieobciążonej I
t
= 0, przy stałej
n=const.
Metoda prądnicowa pomiaru:
Próbę
przeprowadza się zasilając uzwojenie bocznikowe z obcego źródła
prądu. Charakterystyka jest nieliniowa i niejednoznaczna, należy
rozpocząć pomiar od I
f
= 0 i U
0
= Ur (Ur – napięcie remanentu
magnetycznego ; magnetyzm szczątkowy), a następnie zwiększać prąd
wzbudzenia do wartości przy której napięcie U
0
= (1,2 do 1,3) Un.
Drugą gałąź wyznacza się zmniejszając prąd wzbudzenia do 0, w
trakcie pomiarów zmiana prądu musi być wykonana „bez cofania”. Po
tym wyznacza się charakterystykę pośrednią (linia przerywana). Jeśli
prędkość nie była znamionowa to U
0
= f(I
f
) wylicza się wzorem U
0
=
U
op
* ( n
n
/ n
p
).
3. Jakie są warunki konieczne wzbudzenia prądnicy samowzbudnej:
a) istnienie strumienia remanentu magnetycznego,
b) nadanie prądnicy odpowiedniej prędkości obrotowej,
c) zgodne zwroty strumienia remanentu magnetycznego i strumienia wytwarzanego przez uzwojenie
wzbudzenia,
d) odpowiednia rezystancja obwodu wzbudzenia
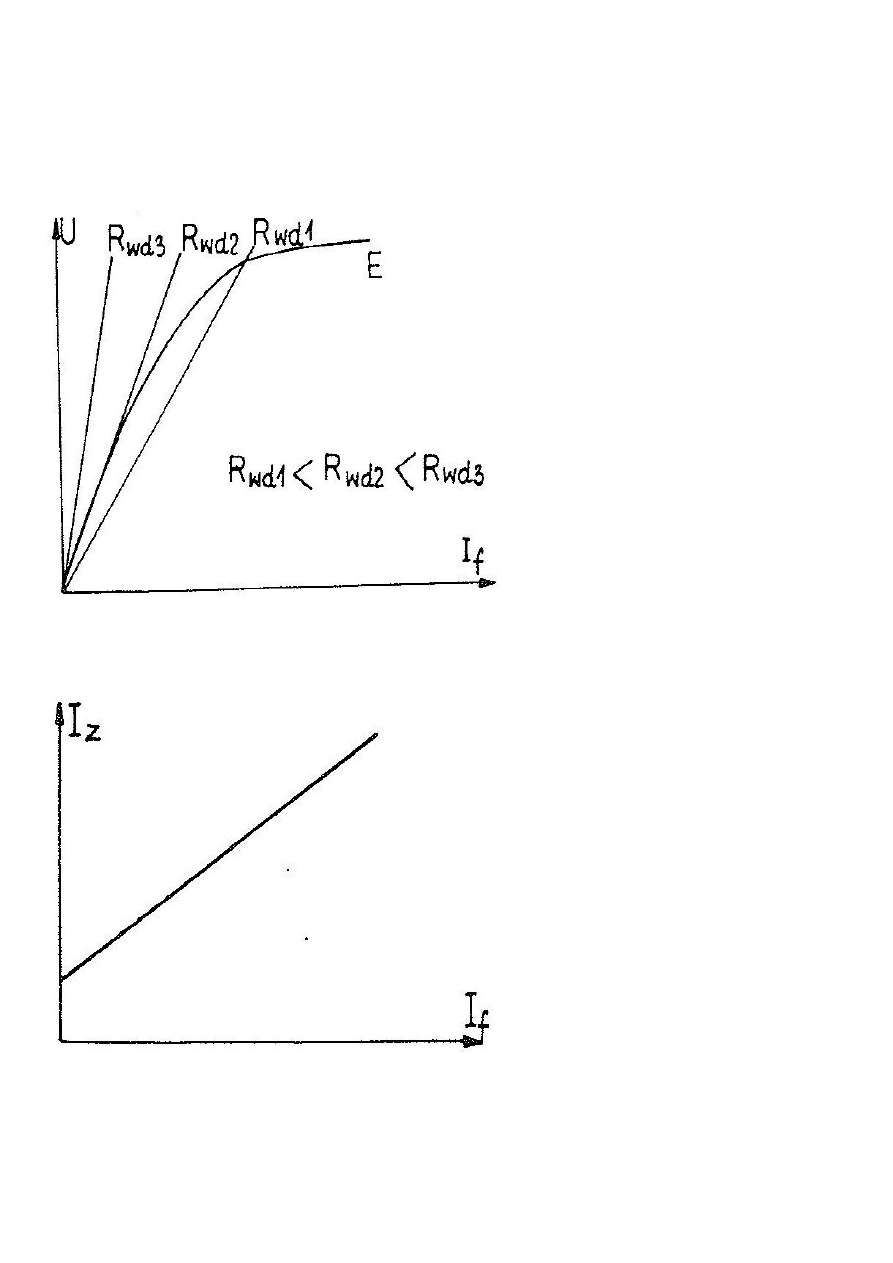
4. W jaki sposób wyznacza się rezystancję krytyczną obwodu wzbudzenia prądnicy samowzbudnej:
Z charakterystyki biegu jałowego i
charakterystyki obwodu wzbudzenia wynika, że
ustalonym punktem pracy jest punkt przecięcia
tych charakterystyk. Zwiększając wartośc
rezystancji dodatkowej R
wd
w obwodzie
wzbudzenia prądnicy powoduje powiększenie
kąta nachylenia charakterystyki obwodu
wzbudzenia, przez co zmniejsza się napięcie
prądnicy. Jeśli rezystancja obwodu wzbudzenia
osiągnie wartość, przy której charakterystyka
obwodu wzbudzenia pokryje się z prostoliniową
częścią charakterystyki biegu jałowego, to
wówczas nastąpi równowaga chwiejna układu.
Ta szczególna wartość rezystancji obwodu
wzbudzenia, przy której występuje niestabilność
napięcia nosi nazwę rezystancji krytycznej R
k
(=
R
w
+ Rw
d
+ R
sz
). Prądnica samowzbudna, przy
rezystancji obwodu wzbudzenia większej od
rezystancji krytycznej, nie wzbudzi się, a jej
napięcie będzie bliskie napięciu remanentu.
5. W jaki sposób wyznacza się ch-kę zwarcia prądnicy prądu stałego i jaki jest jej przebieg
teoretyczny:
Zależność prądu twornika w stanie zwarcia od
prądu wzbudzenia przy znamionowych obrotach.
Można wyznaczyć tylko dla prądnicy u układzie
obcowzbudnym. Pomiar polega na zwiększaniu
prądu wzbudzenia od zera do wartości przy której
prąd zwarcia Iz = (1,2 do 1,3)In, utrzymując stałą
prędkość obrotową.
6. W jakich konfiguracjach połączeń może pracować prądnica prądu stałego:
Konfiguracje to połączeń to: połączenie obco-wzbudne, połączenie bocznikowe, połączenie szeregowo-
bocznikowe z do zwojeniem zgodnym lub przeciwnym.
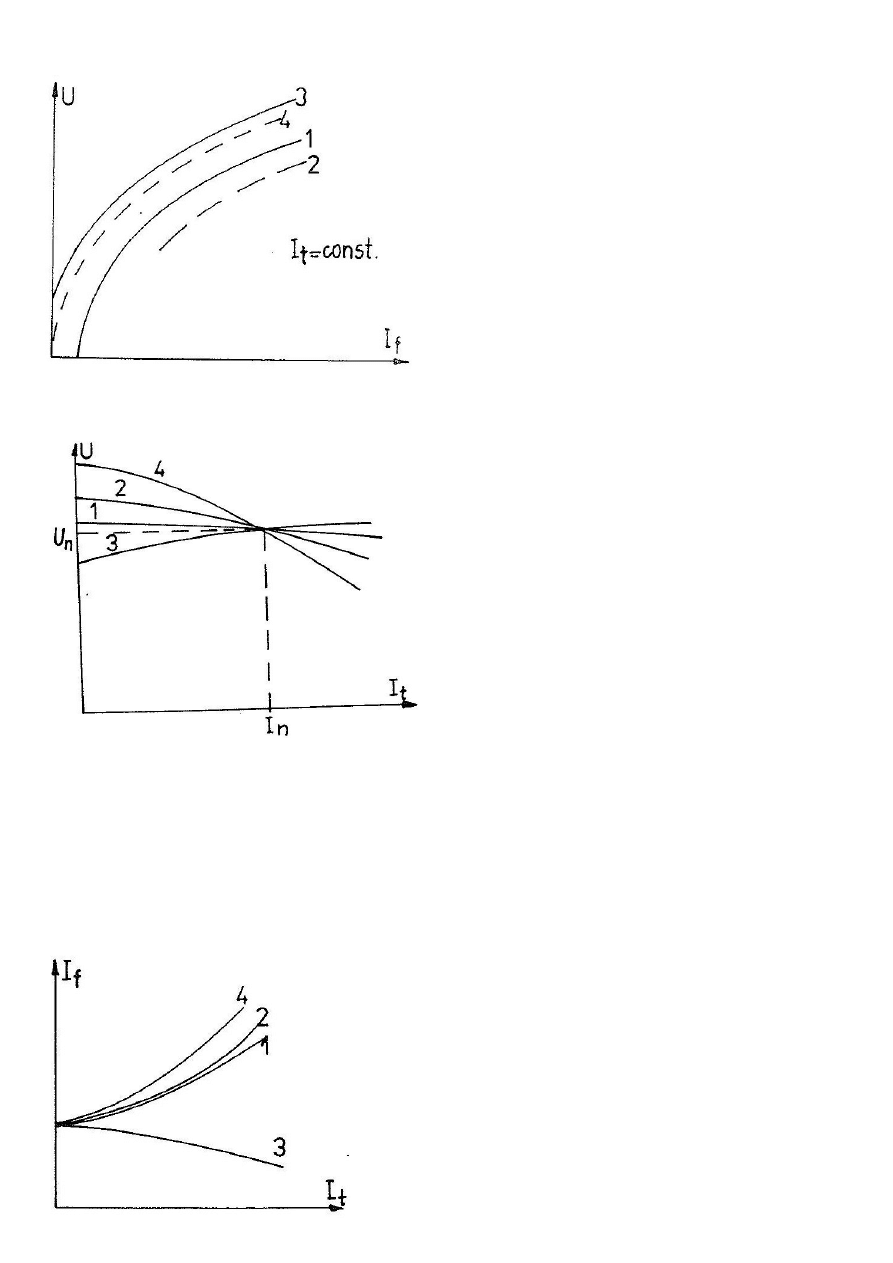
7. W jaki sposób wyznacza się ch-ki obciążenia prądnic prądu stałego i jaki jest ich przebieg
teoretyczny:
Zależność napięcia prądnicy od prądu wzbudzenia, przy
stałym prądzie obciążenia i stałych obrotach. Szczególny
przypadek charakterystyki obciążenia to charakterystyka
biegu jałowego, gdzie prąd obciążenia jest stały i wynosi I
t
=
0. Charakterystykę tą mierzy się w układach:
obcowzbudnym, bocznikowym i bocznikowym z do
zwojeniem zgodnym. Pomiar dokonywany jest najczęściej
przy prądzie I
t
= I
n
.
Obciążenia dla prądnic 1) obco-wzbudnej,
2) bocznikowej,
3) szeregowo-bocznikowej z do zwojeniem zgodnym,
4) bieg jałowy jako szczególny przypadek obciążenia
równego zero.
8. W jaki sposób wyznacza się ch-ki zewnętrzne prądnic prądu stałego i jaki jest ich przebieg
teoretyczny:
Zależność napięcia prądnicy od prądu obciążenia, przy I
f
=
const (dla obco-wzbudnej) ; lub przy Rw = const (dla
bocznikowej i szeregowo-bocznikowej). Mierzy się je w
układach obco-wzbudnym ; bocznikowym ; szeregowo-
bocznikowym z do zwojeniem zgodnym i przeciwnym.
Rezystancję R w obwodzie reguluje się, tak aby przy
prędkości znamionowej i znamionowym prądzie
wzbudzenia, na zaciskach twornika było napięcie
znamionowe.
Obciążenia dla prądnic 1) obco-wzbudnej,
2) bocznikowej,
3) szeregowo-bocznikowej z do zwojeniem zgodnym,
4) szeregowo-bocznikowej z do zwojeniem przeciwnym.
9. Wyjaśnić pojęcie zmienności napięcia prądnicy prądu stałego:
Charakterystyka zewnętrzna pozwala wyznaczyć zmienność napięcia dla prądnic bocznikowej i szeregowo-
bocznikowej. Zmiennością napięcia prądnicy bocznikowej i szeregowo-bocznikowej nazywa się względną
zmianę napięcia w stosunku do napięcia znamionowego, występującą przy odciążeniu nagrzanej maszyny od
mocy znamionowej do biegu jałowego, przy zachowaniu znamionowych obrotów i rezystancji obwodu
wzbudzenia. Określa ją wzór δ
u%
= (ΔU / Un) * 100%, gdzie Un - napięcie znamionowe w V; ΔU = U
0
– U
In
;
Un – napięcie przy obciążeniu prądem znamionowym w V ; U
0
– napięcie biegu jałowego w V.
10. W jaki sposób wyznacza się ch-ki regulacji prądnic prądu stałego i jaki jest ich przebieg
teoretyczny:
Przedstawia zależność prądu wzbudzenia od prądu obciążenia przy
stałym napięciu U = Un i stałych obrotach n=n
n
. Pomiary
przeprowadza się dla wszystkich układów połączeń.
Obciążenia dla prądnic 1) obco-wzbudnej,
2) bocznikowej,
3) szeregowo-bocznikowej z do zwojeniem zgodnym,
4) szeregowo-bocznikowej z do zwojeniem przeciwnym.
Wyszukiwarka
Podobne podstrony:
Pytania kontrolne (wejściówki) laboratorium maszyny elektryczne
Prądnica, LABORATORIUM MASZYN ELEKTRYCZNYCH
Silnik szeregowy prądu stałego , LABORATORIUM MASZYN ELEKTRYCZNYCH
Bocznikowa prądnica prądu stałego, LABORATORIUM MASZYN ELEKTRYCZNYCH
Badanie prądnicy synchronicznej v3, LABORATORIUM MASZYN ELEKTRYCZNYCH
Silnik 1-fazowy , komutatorowy , małej mocy , LABORATORIUM MASZYN ELEKTRYCZNYCH
1224048119 Tabela pomiarowa do pomiaru pradu i napiecia, Laboratorium z podstaw elektrotechniki i el
Badanie prądnicy prądu stałego v5, Laboratorium Maszyn Elektrycznych
1224048119 Tabela pomiarowa do pomiaru pradu i napiecia, Laboratorium z podstaw elektrotechniki i el
Badanie prądnicy prądu stałego v5, Laboratorium Maszyn Elektrycznych
dane do sprawka, SiMR, Semestr 6, Laboratorium Maszyn Budowlanych, MB2
Badanie indukcyjnego silnika pierscieniowego v4, LABORATORIUM MASZYN ELEKTRYCNYCH
Odpowiedzi na pytania kontrolne
Laboratorium z Maszyn Elektrycz Nieznany
maszyny pytania, Polibuda, IV semestr, maszyny elektryczne, PEWNIAKI
Badanie indukcyjnego silnika pierścieniowego, LABORATORIUM MASZYN ELEKTRYCNYCH
Synchroniczna z siecią, LABORATORIUM MASZYN ELEKTRYCZNYCH
PROT3, LABORATORIUM MASZYN ELEKTRYCNYCH
więcej podobnych podstron