
1
Metody sztucznej inteligencji
Politechnika Śląska
Katedra Podstaw Konstrukcji Maszyn
Rok akademicki 2009/2010
Wykład 4

2
Użycie logiki pierwszego rzędu nie
zapewnia powodzenia z powodu
• niedokładność - skompletowanie pełnej listy
możliwych reguł wymaga za dużo pracy i za
dużo czasu,
• nieznajomości teorii - np. medycyna nie zna
wytłumaczenia powodów wszystkich schorzeń,
• nieznajomości praktyki - nawet jeżeli znamy
wszystkie reguły nie możemy być pewni czy w
przypadku konkretnego pacjenta określone
reguły są poprawne.
3
Teoria prawdopodobieństwa
• pozwala na sumowanie niepewności wynikającej
z wielu przyczyn
• prawdopodobieństwo 0.8 oznacza 80%
stopień
przekonania
o prawdziwości zdania
(stwierdzenia)
• prawdopodobieństwo nie oznacza stopnia
prawdziwości zdania (stwierdzenia)

4
Podstawowe rodzaje
prawdopodobieństwa
• Prawdopodobieństwo bezwarunkowe (a priori)
• Prawdopodobieństwo warunkowe (a posteriori)
• Prawdopodobieństwo łączne
5
Twierdzenie Bayesa
)
(
)
|
(
)
(
B
P
B
A
P
B
A
P
=
∧
)
(
)
|
(
)
(
A
P
A
B
P
B
A
P
=
∧
)
(
)
(
)
|
(
)
|
(
A
P
B
P
B
A
P
A
B
P
=
Reguła Bayesa
Reguła Bayesa umożliwia obliczenie
nieznanych prawdopodobieństw na podstawie
znanych prawdopodobieństw.

6
Sieć bayesowska (sieć
przekonań - belief network)
• Zbiór zmiennych losowych (
węzły sieci
)
• Zbiór zorientowanych krawędzi (
określają,
która zmienna ma bezpośredni wpływ na
inną
)
• Tablica prawdopodobieństw warunkowych
(
określa wpływ „rodziców” na węzeł
)
Sieć przekonań to graf skierowany, acykliczny
Sieć przekonań reprezentuje łączny rozkład
prawdopodobieństwa dla danej dziedziny

7
Rodzaje wnioskowania
w sieciach przekonań (1)
• Wnioskowanie diagnostyczne
(od efektów do
przyczyn)
– Wiemy że JohnCalls
– wnioskujemy P(Burglary|JohnCalls) = 0.016
• Wnioskowanie przyczynowe
(od przyczyn do
efektów)
– Wiemy, że Burglary
– wnioskujemy P(JohnCalls|Burglary) = 0.86,
P(MaryCalls|Burglary) = 0.67
Russel S., Norvig P.: Artificial Intelligence. A modern approach

8
Rodzaje wnioskowania
w sieciach przekonań (2)
• Wnioskowanie międzyprzyczynowe
(pomiędzy przyczynami wspólnego efektu)
– jeśli wiemy, że Alarm, P(Burglary|Alarm) = 0.376
– gdy wiemy dodatkowo, że Earthquake, to
P(Burglary|Alarm
∧ Earthquake) = 0.003
Russel S., Norvig P.: Artificial Intelligence. A modern approach

9
Rodzaje wnioskowania
w sieciach przekonań (3)
• Wnioskowanie mieszane
(łączy dwa lub więcej
powyższych rodzajów wnioskowań):
– JohnCalls = True (efekt) oraz Eartquake = False
(przyczyna) daje:
P(Alarm|JohnCalls
∧¬ Eartquake) = 0.03
[jednoczesne zastosowanie wnioskowania diagnostycznego
i przyczynowego]
P(Burglary|JohnCalls
∧¬ Eartquake) = 0.0017
[jednoczesne zastosowanie wnioskowania diagnostycznego
i międzyprzyczynowego]
Russel S., Norvig P.: Artificial Intelligence. A modern approach
10
Rozumowanie rozmyte
Logika rozmyta nie jest logiką, która jest rozmyta, ale
logiką, która jest używana do opisania rozmycia
wiedzy.
Logika rozmyta jest oparta na tym, że zjawiska
(zdarzenia, fakty – temperatura, wzrost, prędkość,
odległość, wygląd) opisuje się zazwyczaj za pomocą
rozmytej skali pojęć (np. gorąco, bardzo wysoki).
Logika klasyczna oparta jest na ostrym rozróżnieniu
między zbiorami (klasami).
Logika rozmyta odzwierciedla rozumowanie człowieka
i jest próbą numerycznego modelowania rozumienia
sensu pojęć.

11
Logika rozmyta (LR) jest zbiorem matematycznych
zasad określających reprezentację wiedzy i stopień
przynależności do zbioru.
W odróżnieniu od dwuwartościowej logiki
Boolowskiej, logika rozmyta jest wielowartościowa.
Zastosowanie LR polega na wyliczaniu stopni
przynależności i stopni prawdziwości.
Podobnie jak w logice Boolowskiej, w LR 0 oznacza
fałsz, a 1 prawdę.

12
Reguła rozmyta
Reguła rozmyta jest definiowana jako zdanie
warunkowe o postaci:
IF
x jest A
THEN y jest B
gdzie x i y są zmiennymi lingwistycznymi; a A i B są
wartościami lingwistycznymi określonymi przez
zbiory rozmyte.
13
Różnica między regułą ostrą i rozmytą
W klasycznej regule stosuje się logikę binarną,
Reguła: 1
IF
prękość > 100
THEN miejsce zatrzymania
jest daleko
Regułą: 2
IF
prędkość < 40
THEN miejsce zatrzymania
jest blisko
Zmienna prędkość może mieć wartości numeryczne np. od
0 do 220 km/h, ale zmienna miejsce zatrzymania może
przyjmować tylko wartości daleko lub blisko..
Nengnevintsky M.: Artificial Intelligence

14
Wnioskowanie Mamdaniego
Metoda Mamdaniego polega na realizacji czterech
kroków:
z
rozmywaniu zmiennych wejściowych,
z
ocenie reguł
z
agregacji wyjść reguł
z
wyostrzaniu .
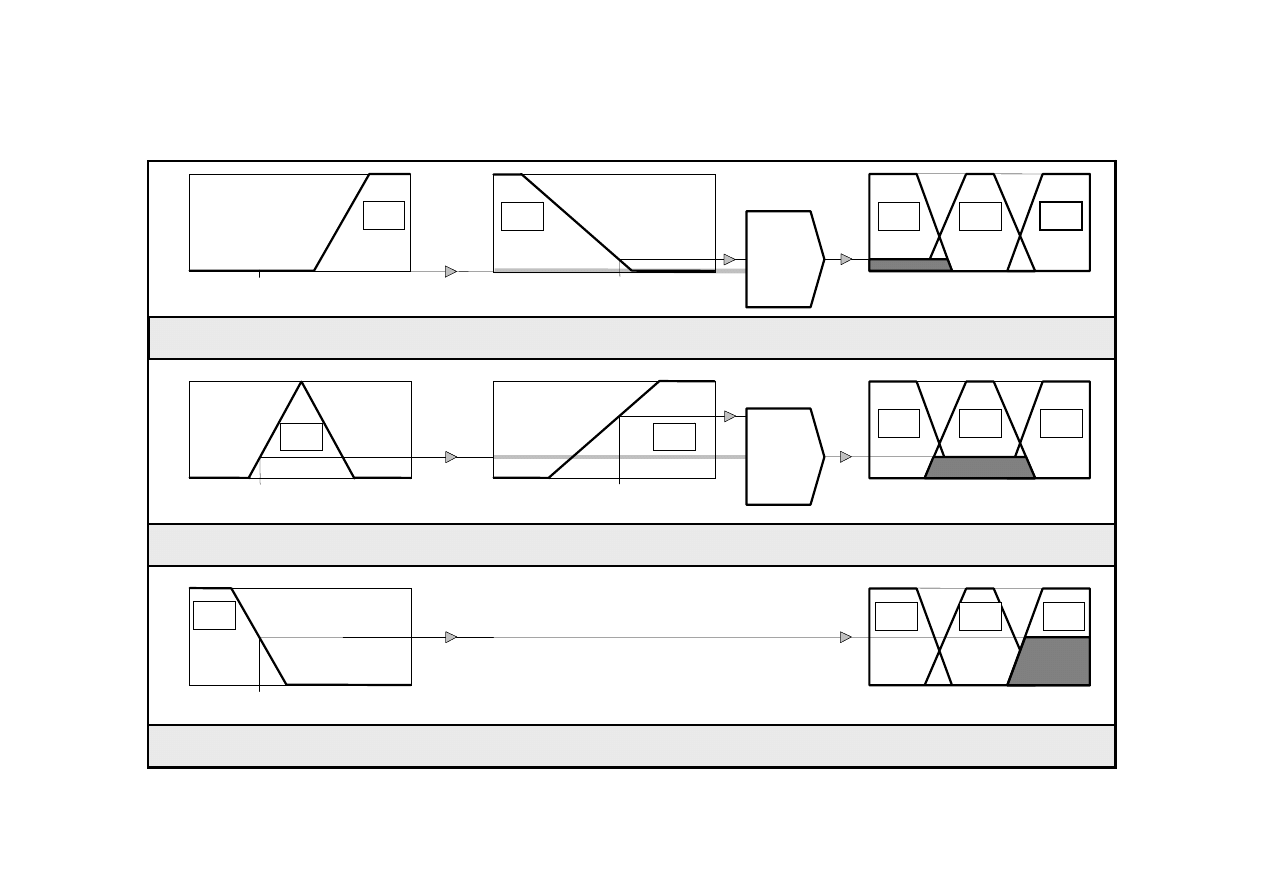
15
Ocena reguł metodą Mamdamiego
A3
1
0
X
1
y1
0
Y
0.0
x1
0
0.1
C1
1
C2
Z
1
0
X
0.2
0
0.2
C1
1
C2
Z
A2
x1
Rule 3:
A1
1
0
X
0
1
Z
x1
THEN
C1
C2
1
y1
B2
0
Y
0.7
B1
0.1
C3
C3
C3
0.5
0.5
OR
(max)
AND
(min)
OR
THEN
Rule 1:
AND
THEN
Rule 2:
IF x is A3 (0.0)
y is B1 (0.1)
z is C1 (0.1)
IF x is A2 (0.2)
y is B2 (0.7)
z is C2 (0.2)
IF x is A1 (0.5)
z is C3 (0.5)
Nengnevintsky M.: Artificial Intelligence

16
Metoda wnioskowania Mamdaniego polega na
znajdowaniu środka ciężkości dwuwymiarowej
figury. Procedura ta nie jest efektywna
obliczeniowo.
Michio Sugeno wprowadził singleton jako funkcję
przynależności konkluzji wynikających z reguł.
Singleton (rozmyty singleton) jest zbiorem
rozmytym, którego funkcja przynależności
przyjmuje wartość 1 w jednym punkcie, a poza nim
przyjmuje wartość 0.
Wnioskowanie metodą Sugeno
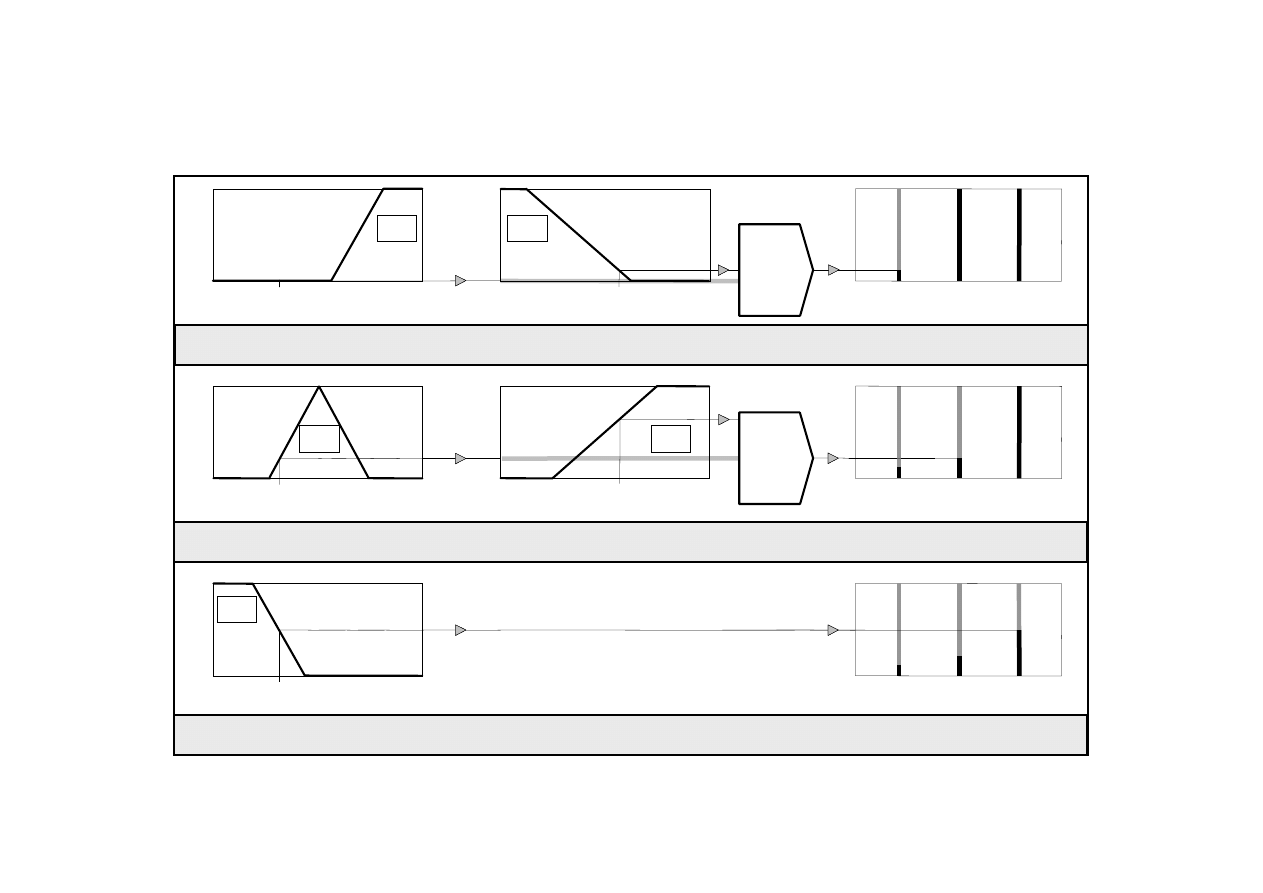
17
A3
1
0
X
1
y1
0
Y
0.0
x1
0
0.1
1
Z
1
0
X
0.2
0
0.2
1
Z
A2
x1
IF x is A1 (0.5)
z is k3 (0.5)
Rule 3:
A1
1
0
X
0
1
Z
x1
THEN
1
y1
B2
0
Y
0.7
B1
0.1
0.5
0.5
OR
(max)
AND
(min)
OR y is B1 (0.1)
THEN
z is k1 (0.1)
Rule 1:
IF x is A2 (0.2) AND y is B2 (0.7)
THEN
z is k2 (0.2)
Rule 2:
k1
k2
k3
IF x is A3 (0.0)
Ocena reguł w metodzie Sugeno
Nengnevintsky M.: Artificial Intelligence
Document Outline
- Użycie logiki pierwszego rzędu nie zapewnia powodzenia z powodu
- Teoria prawdopodobieństwa
- Podstawowe rodzaje prawdopodobieństwa
- Twierdzenie Bayesa
- Sieć bayesowska (sieć przekonań - belief network)
- Rodzaje wnioskowania w sieciach przekonań (1)
- Rodzaje wnioskowania w sieciach przekonań (2)
- Rodzaje wnioskowania w sieciach przekonań (3)
Wyszukiwarka
Podobne podstrony:
MSI w2 konspekt 2010 id 309790 Nieznany
MSI w1 konspekt 2010 id 309789 Nieznany
MSI w5 konspekt 2010 id 309793 Nieznany
E2 2010 id 149235 Nieznany
kinetyka 5 11 2010 id 235066 Nieznany
Arot 2010 07 2010 id 69283 Nieznany
c3 19 12 2010 id 97134 Nieznany
ARKUSZ POPRAWKA 2010 id 68814 Nieznany
mat prob styczen 2010(1) id 282 Nieznany
BIOCHEMIA skrypt 2010 id 86508 Nieznany
kolokwium 2010 id 240526 Nieznany
3 1 2010 id 33377 Nieznany (2)
LATO 2010 id 263802 Nieznany
Konspekt; kolko id 245880 Nieznany
konspekt lab6 id 245555 Nieznany
zestaw pytan MiBM 2010 id 58854 Nieznany
kt2 2010 id 253072 Nieznany
egzamin 06 2010 1 id 151726 Nieznany
więcej podobnych podstron