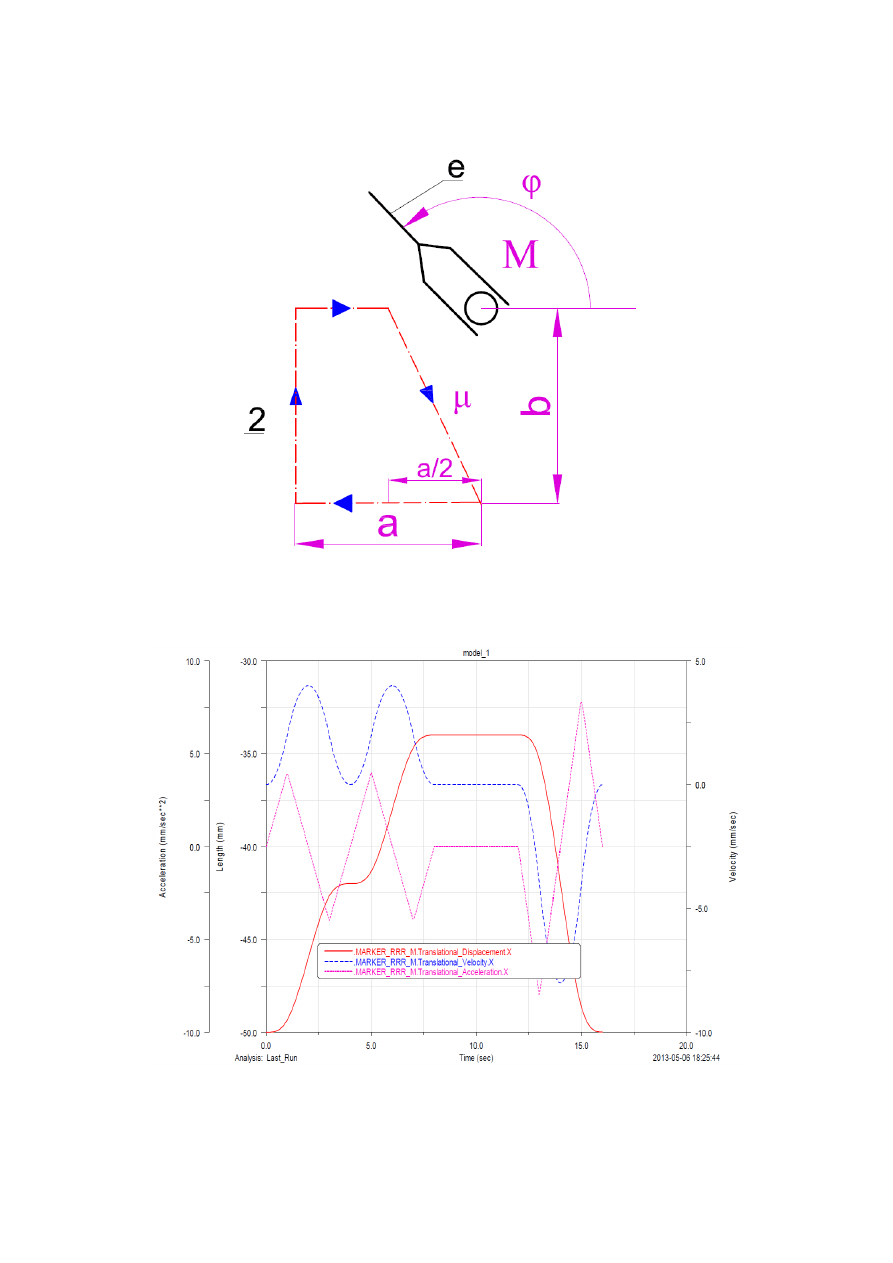
Przykładowa trajektoria 4-odcinkowa
Przykładowe przebiegi zmiennych niezależnych (wymuszeń)
X
Na ocenę 5.0
napęd typu : przyspieszenie
Przykład dla OSI X:
IF(time-( [t1]*0.25) : [sx1] * (time) , [sx1] * (time),
IF(time-( [t1]*0.75) : [sx1]* (-time + [t1]*0.50) , [sx1] * ( - time + [t1] *0.50),
IF(time-([t1]*1.00) : [sx1] * (time - [t1]), [sx1] * ( time - [t1] ),
IF(time-([t1] + [t2]*0.25) : [sx2]* ( time - [t1]) , [sx2]* ( time - [t1]),
IF(time-([t1]+ [t2]*0.75) : [sx2]* ( -time + [t1] + [t2]*0.50 ) , [sx2]* ( -time + [t1] + [t2] *0.50 ),
IF(time-([t1+t2]) : [sx2]* ( time - [t1+t2]), [sx2]* ( time - [t1+t2]),
IF(time-([t1+t2] +[t3]*0.25) : [sx3] * ( time - [t1+t2] ) , [sx3] * ( time - [t1+t2] ),
IF(time-([t1+t2] +[t3]*0.75) : [sx3] * ( - time + [t1+t2] + [t3]*0.50 ) , [sx3] * ( - time + [t1+t2] + [t3] *0.50 ),
IF(time-([t1+t2+t3]) : [sx3] * ( time - [t1+t2+t3] ) , [sx3] * ( time - [t1+t2+t3] ),
IF(time-([t1+t2+t3] +[t4]*0.25) : [sx4] * (time - [t1+t2+t3] ) , [sx4] * (time - [t1+t2+t3] ),
IF(time-([t1+t2+t3]+ [t4]*0.75) : [sx4] * (-time + [t1+t2+t3] + [t4]*0.50 ) , [sx4] * (-time + [t1+t2+t3] + [t4]*0.50 ),
IF(time-([T]) : [sx4] * ( time - [t1+t2+t3+t4]) , [sx4] * ( time - [t1+t2+t3+t4]),
0))) ))) ))) )))
Należy wpisać wg. wyliczeń:
sx1=0.1*x
1
/(3.125*t
1
3
)
sx2=0.1*x
2
/(3.125*t
2
3
)
sx3=0.1*x
3
/(3.125*t
3
3
)
sx4=0.1*x
4
/(3.125*t
4
3
)
T= t
1
+t
2
+t
3
+t
4
Napęd Y
Za x wstawić y
Na ocenę 4.0
typ napędu : przemieszczenie
funkcja STEP
Przykład dla OSI X:
Trajektoria (w kierunku X):
od 0.0 do 1.2s
w prawo
125mm (125-0)
od 1.2 do 2.3s
w prawo
97mm (222-125)
od 2.3 do 4.1s
brak ruchu
0mm
(222-222)
od 4.1 do 6.0s
w lewo
222mm (0-222)
IF(time-1.2:STEP(time,0.0,0.0 ,1.2,125),STEP(time,0.0,0.0 ,1.2,125),
IF(time-2.3:STEP(time,1.2,125,2.3,222),STEP(time,1.2,125,2.3,222),
IF(time-4.1:STEP(time,2.3,222,4.1,222),STEP(time,2.3,222,4.1,222),
IF(time-6.0:STEP(time,4.1,222,6.0,0.0) ,STEP(time,4.1,222,6.0,0.0 ),
0.0))))
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron