Elektrotechnika
Podstawy Automatyki 2
PODSTAWY AUTOMATYKI 2 – ĆWICZENIA
lista zadań nr 1
Transformata Z
1. Korzystając wprost z definicji znaleźć transformatę Z funkcji:
a.
n
n
f
3
)
(
d.
1
5
)
(
n
n
f
b.
2
2
)
(
n
n
f
e.
)
(
)
(
4
t
e
t
f
t
1
c.
1
3
)
(
2
n
n
f
f.
)
(
)
(
t
e
t
f
p
T
t
1
2. Korzystając z podstawowych własności transformaty, znaleźć transformatę Z funkcji:
a.
)
(
8
3
)
(
t
t
t
f
1
d.
)
(
5
,
0
)
(
2
t
t
t
f
1
b.
)
(
5
)
(
t
t
t
f
1
e.
)
(
5
)
(
3
t
e
t
f
t
1
c.
)
(
)
(
1
t
t
t
f
1
f.
)
(
3
)
(
4
t
e
t
t
f
t
1
3. Obliczyć odpowiedź na impuls Diraca,
)
(n
g
, dla układu impulsowego o transmitancji:
a.
5
6
2
5
,
0
)
(
2
z
z
z
z
G
e.
5
,
0
5
,
1
)
(
2
z
z
z
z
G
b.
8
6
2
5
)
(
2
z
z
z
z
G
f.
20
9
3
2
)
(
2
z
z
z
z
G
c.
10
7
5
,
0
)
(
2
z
z
z
z
G
g.
3
4
1
3
)
(
2
z
z
z
z
G
d.
15
8
2
4
)
(
2
z
z
z
z
G
h.
2
2
1
)
(
z
z
z
G
4. Obliczyć odpowiedź na skok jednostkowy,
)
(
1
n
y
, dla układu impulsowego o transmitancji:
a.
2
)
(
z
z
z
G
d.
1
1
2
)
(
z
z
z
G
b.
1
5
,
0
1
)
(
z
z
G
e.
6
5
)
(
2
z
z
z
z
G
c.
1
1
)
(
z
z
z
G
f.
2
4
)
(
2
z
z
z
z
G
Elektrotechnika
Podstawy Automatyki 2
5. Dana jest odpowiedź na impuls Diraca
)
(n
g
. Obliczyć transmitancję takiego układu
impulsowego:
a.
n
n
n
g
2
3
3
2
)
(
c.
n
n
n
g
)
2
(
3
)
1
(
2
)
(
1
b.
1
2
5
)
(
n
n
g
d.
1
3
)
(
n
n
n
g
6. Wyznaczyć odpowiednik impulsowy transmitancji układu ciągłego
)
(s
G
dla czasu
próbkowania
s
T
p
1
,
0
.
a.
2
3
1
2
)
(
2
s
s
s
s
G
d.
4
1
)
(
2
s
s
G
b.
4
5
2
)
(
2
s
s
s
s
G
e.
s
s
s
s
G
2
4
)
(
2
c.
6
5
1
)
(
2
s
s
s
G
f.
1
2
1
)
(
2
s
s
s
G
Elektrotechnika
Podstawy Automatyki 2
PODSTAWY AUTOMATYKI 2 – ĆWICZENIA
lista zadań nr 2
Równania różnicowe. Ekstrapolatory
1. Dla układu impulsowego o transmitancji
)
(z
G
, zakładając zerowe warunki początkowe,
obliczyć wartość pierwszych pięciu próbek sygnału wyjściowego
)
(n
y
, dla sygnału
wejściowego
)
(
)
(
t
t
u
.
a.
5
5
)
(
z
z
G
c.
3
2
2
)
(
2
z
z
z
z
G
b.
1
2
4
)
(
z
z
G
d.
1
2
2
2
)
(
2
z
z
z
z
G
2. Znaleźć równanie różnicowe wiążące sygnały wejściowy i wyjściowy dla układu
impulsowego o transmitancji
)
(z
G
, zakładając zerowe warunki początkowe. Obliczyć
wartość próbki sygnału wyjściowego
)
3
(
y
, dla sygnału wejściowego
)
(
)
(
t
t
u
1
.
a.
5
6
1
)
(
2
z
z
z
z
G
c.
10
2
)
(
z
z
G
b.
6
5
1
)
(
2
z
z
z
G
d.
2
1
)
(
2
z
z
G
3. Rozwiązać równanie różnicowe dla podanych warunków początkowych.
a.
0
)
1
(
4
)
(
n
y
n
y
,
1
)
1
(
y
b.
0
)
2
(
9
)
(
n
y
n
y
,
1
)
1
(
y
,
1
)
2
(
y
c.
0
)
2
(
2
)
1
(
3
)
(
n
y
n
y
n
y
,
2
)
1
(
y
,
1
)
2
(
y
d.
0
)
2
(
2
)
1
(
3
)
(
n
y
n
y
n
y
,
3
)
1
(
y
,
2
)
2
(
y
e.
0
)
2
(
2
)
1
(
)
(
n
y
n
y
n
y
,
3
)
1
(
y
,
6
)
2
(
y
4. Rozwiązać układ równań różnicowych dla podanych warunków początkowych.
a.
)
(
)
(
1
2
3
4
)
1
(
)
1
(
2
1
2
1
n
x
n
x
n
x
n
x
,
2
)
0
(
1
x
,
1
)
0
(
2
x
b.
)
(
)
(
1
3
4
6
)
1
(
)
1
(
2
1
2
1
n
x
n
x
n
x
n
x
,
1
)
0
(
1
x
,
2
)
0
(
2
x
Elektrotechnika
Podstawy Automatyki 2
c.
)
(
)
(
2
3
3
4
)
1
(
)
1
(
2
1
2
1
n
x
n
x
n
x
n
x
,
3
)
0
(
1
x
,
1
)
0
(
2
x
5. Obliczyć transmitancję
)
(z
G
obiektu o transmitancji
)
(s
G
przy zastosowaniu ekstrapolatora
zerowego rzędu.
a.
1
1
)
(
s
s
G
,
s
T
p
1
d.
5
2
)
(
s
s
G
,
s
T
p
10
b.
)
5
,
0
ln(
2
)
(
s
s
G
,
s
T
p
1
e.
2
3
1
)
(
2
s
s
s
G
,
s
T
p
1
c.
5
2
)
(
s
s
G
,
s
T
p
1
,
0
f.
)
2
ln(
)
4
ln(
1
)
(
s
s
s
s
G
,
s
T
p
1
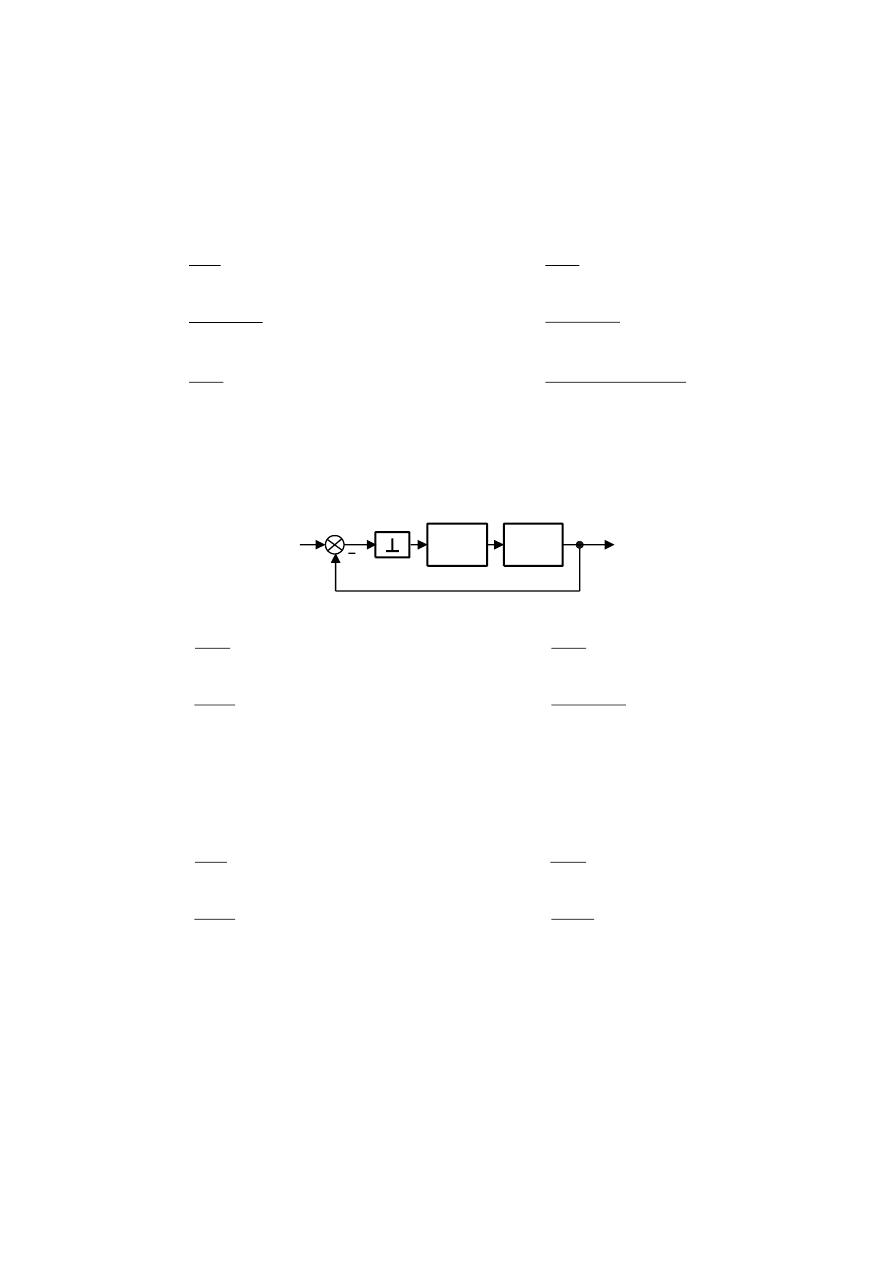
6. W układzie jak na rysunku zastosowano ekstrapolator zerowego rzędu. Obliczyć wartości
pierwszych czterech próbek sygnałów odpowiedzi
)
(n
y
i błędu
)
(n
e
przy pobudzeniu skokiem
jednostkowym (
s
T
p
1
).
G
E
(s)
G
0
(s)
T
p
a.
2
1
)
(
0
s
s
G
,
c.
4
5
,
0
)
(
0
s
s
G
,
b.
1
3
3
)
(
0
s
s
G
,
d.
8
6
1
)
(
2
0
s
s
s
G
,
7. W układzie jak na rys. 9.1 zastosowano ekstrapolator zerowego rzędu. Obliczyć wartości
pierwszych pięciu próbek sygnałów odpowiedzi
)
(n
y
i przy pobudzeniu skokiem prędkości
(
s
T
p
1
).
a.
1
1
)
(
0
s
s
G
c.
2
1
)
(
0
s
s
G
b.
1
3
1
)
(
0
s
s
G
d.
3
2
5
,
0
)
(
0
s
s
G
Elektrotechnika
Podstawy Automatyki 2
PODSTAWY AUTOMATYKI 2 – ĆWICZENIA
lista zadań nr 3
Algebra schematów blokowych układów dyskretnych. Uchyby ustalone
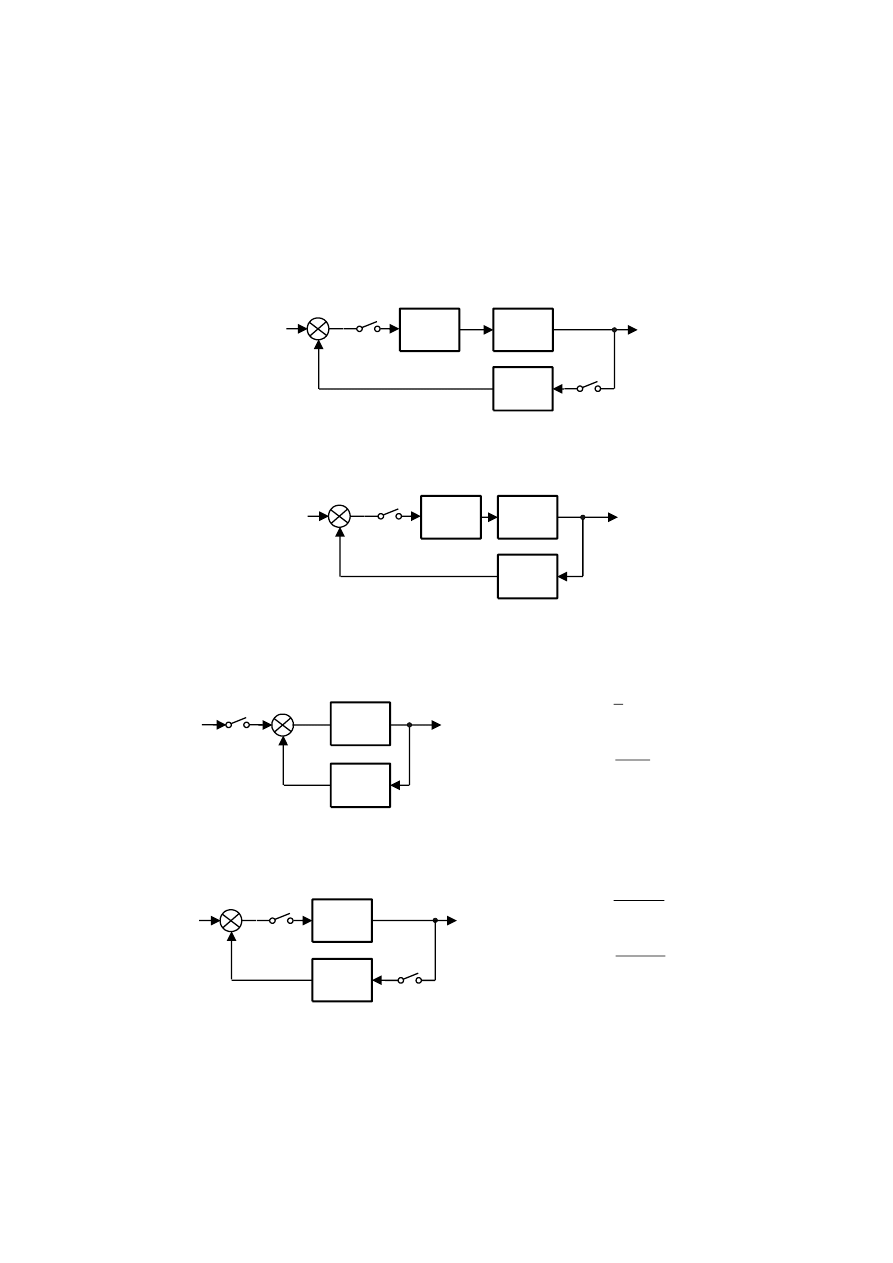
1. Wyprowadzić wzór na dyskretną transmitancję zastępczą układów jak na rysunkach:
a.
Y(s)
U(s)
E(s)
T
p
G
1
(s)
G
2
(s)
G
3
(s)
T
p
b.
Y(s)
U(s)
E(s)
T
p
G
1
(s)
G
2
(s)
G
3
(s)
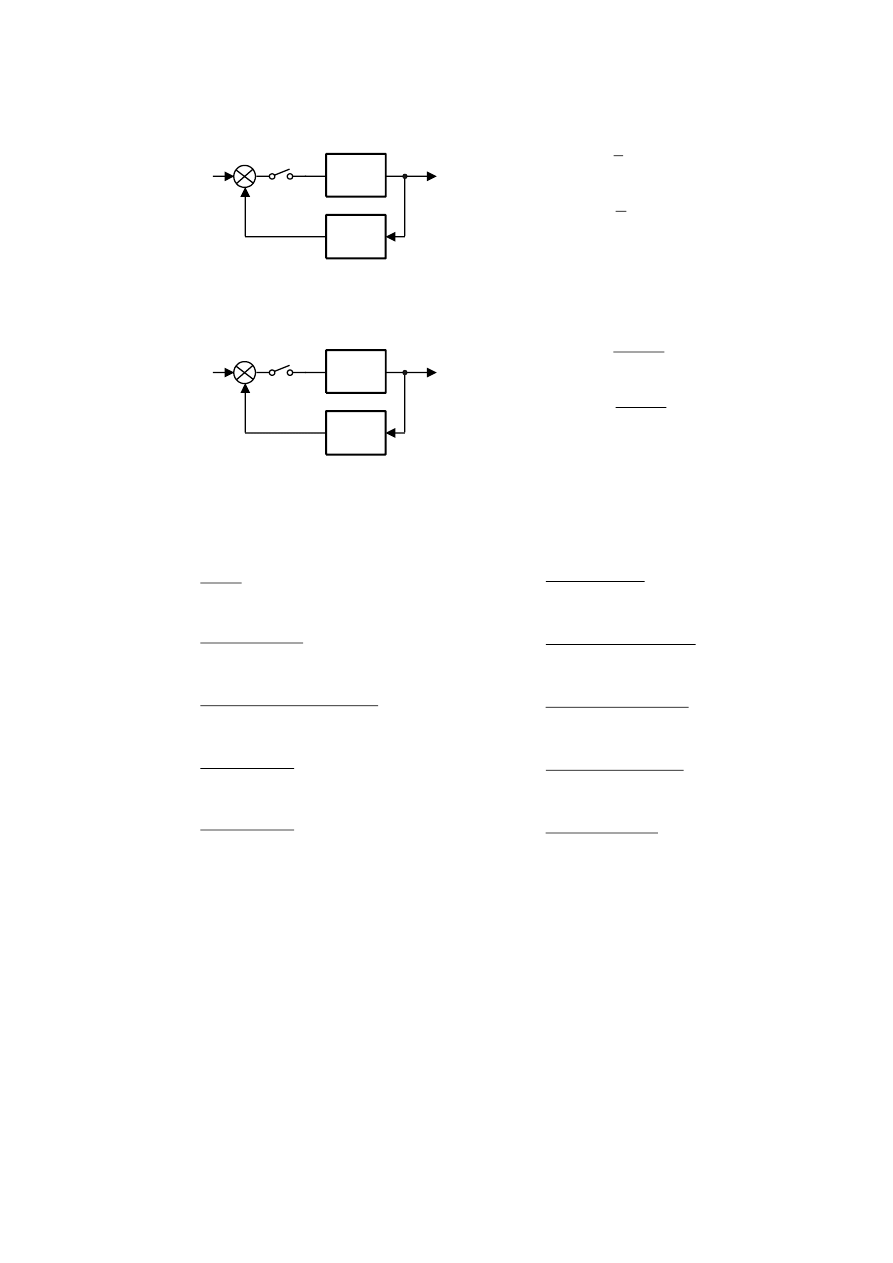
2. Wyznaczyć transmitancję zastępczą układów jak na rysunkach:
a.
G
2
(s)
Y(s)
U(s)
E(s)
T
p
G
1
(s)
s
s
G
1
)
(
1
2
1
)
(
2
s
s
G
1
p
T
b.
Y(s)
U(s)
E(s)
T
p
G
1
(s)
G
2
(s)
T
p
2
ln
1
)
(
1
s
s
G
3
ln
2
)
(
2
s
s
G
1
p
T
Elektrotechnika
Podstawy Automatyki 2
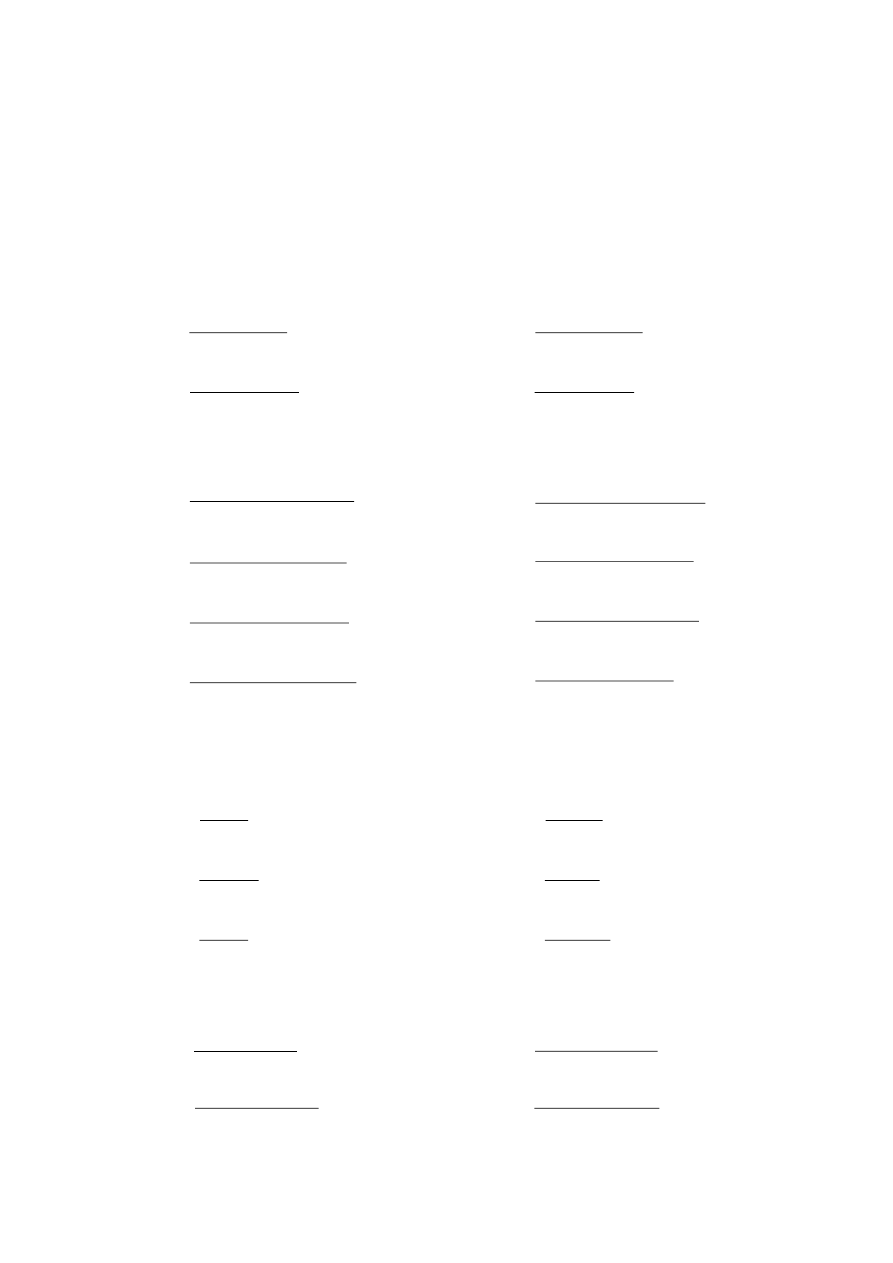
c.
G
2
(s)
Y(s)
U(s)
E(s)
T
p
G
1
(s)
s
s
G
1
)
(
1
s
s
G
2
)
(
2
1
p
T
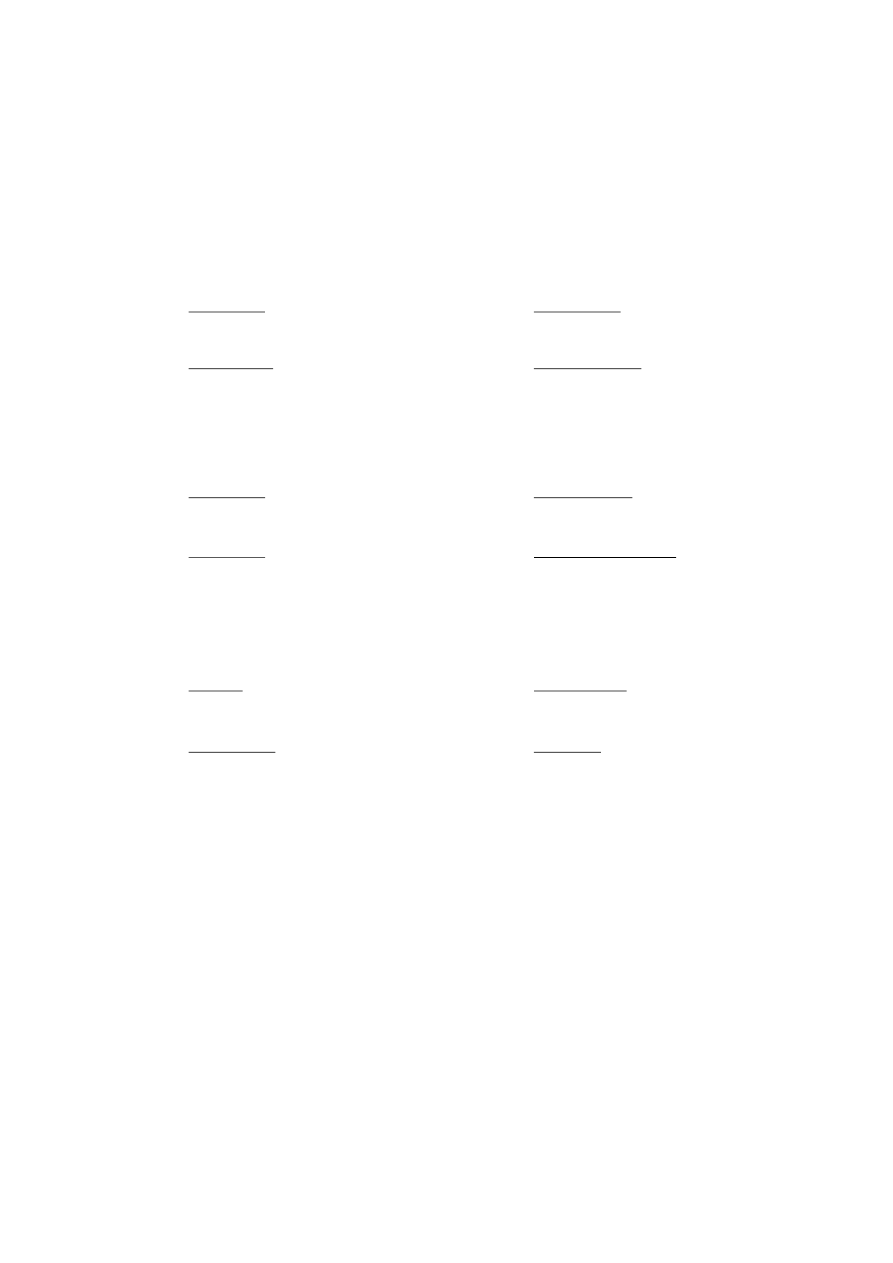
d.
G
2
(s)
Y(s)
U(s)
E(s)
T
p
G
1
(s)
2
ln
1
)
(
1
s
s
G
2
ln
2
)
(
2
s
s
G
1
p
T
3. Dana jest transmitancja układu otwartego
)
(
12
z
G
. Obliczyć wartość uchybów położenia,
prędkości i przyspieszenia (
s
T
p
1
):
a.
1
2
2
)
(
12
z
z
G
f.
5
,
0
5
,
1
25
,
0
5
,
0
)
(
2
12
z
z
z
z
G
b.
9
,
0
7
,
0
1
)
(
2
12
z
z
z
G
g.
1
,
0
8
,
0
9
,
1
12
,
0
96
,
0
2
)
(
2
3
2
12
z
z
z
z
z
z
G
c.
125
,
5
75
,
0
5
,
1
5
)
(
2
3
12
z
z
z
z
G
h.
5
,
0
2
5
,
2
625
,
0
25
,
1
)
(
2
3
2
12
z
z
z
z
z
z
G
d.
1
,
1
1
,
0
1
2
,
0
)
(
2
12
z
z
z
z
G
i.
5
,
0
5
,
1
625
,
0
75
,
0
3
)
(
2
3
2
12
z
z
z
z
z
G
e.
1
,
1
1
,
0
1
4
,
0
)
(
2
12
z
z
z
z
G
j.
1
3
3
1
9
,
2
3
,
2
)
(
2
3
2
12
z
z
z
z
z
z
G
Elektrotechnika
Podstawy Automatyki 2
PODSTAWY AUTOMATYKI 2 – ĆWICZENIA
lista zadań nr 4
Stabilność układów dyskretnych
1. Dana jest transmitancja
)
(z
G
obiektu. Wykorzystując podstawowy warunek stabilności
układów dyskretnych, zbadać czy układ zamknięty (ze sztywnym sprzężeniem zwrotnym) jest
stabilny.
a.
6
,
1
3
,
1
2
)
(
2
z
z
z
G
c.
38
,
0
8
,
1
2
)
(
2
z
z
z
G
b.
92
,
1
4
,
0
2
)
(
2
z
z
z
G
d.
96
,
0
3
2
)
(
2
z
z
z
z
G
2. Korzystając z kryterium Jury’ego zbadać stabilność układu o transmitancji:
a.
1
2
3
4
5
3
)
(
2
3
4
z
z
z
z
z
z
G
e.
2
2
2
2
4
1
5
2
)
(
2
3
4
2
z
z
z
z
z
z
z
G
b.
1
2
4
2
1
)
(
2
3
4
2
z
z
z
z
z
z
z
G
f.
4
3
2
5
5
)
(
2
3
4
z
z
z
z
z
G
c.
2
2
4
3
1
3
)
(
2
3
4
3
z
z
z
z
z
z
G
g.
1
2
2
3
3
4
)
(
2
3
4
z
z
z
z
z
z
G
d.
2
3
2
3
3
1
2
)
(
2
3
4
2
3
z
z
z
z
z
z
z
G
h.
1
2
1
2
)
(
2
3
4
z
z
z
z
z
z
G
3. Dana jest transmitancja
)
(
12
z
G
układu otwartego. Wykorzystując kryterium Nyquista
zbadać dla jakiego k układ zamknięty jest niestabilny
s
T
p
1
.
a.
5
,
0
)
(
12
z
k
z
G
d.
4
,
0
3
2
)
(
12
z
k
z
G
b.
2
,
0
2
)
(
12
z
k
z
G
e.
8
,
1
2
)
(
12
z
k
z
G
c.
8
,
0
)
(
12
z
k
z
G
f.
6
,
9
12
1
,
0
)
(
12
z
k
z
G
4. Korzystając z przekształcenia biliniowego zbadać stabilność układu o transmitancji
)
(z
G
.
a.
5
1
)
(
2
3
z
z
z
z
G
c.
1
3
2
5
1
)
(
2
3
z
z
z
z
G
b.
1
3
2
2
2
)
(
2
3
z
z
z
z
G
d.
1
8
3
7
1
)
(
2
3
z
z
z
z
G
Elektrotechnika
Podstawy Automatyki 2
PODSTAWY AUTOMATYKI 2 – ĆWICZENIA
lista zadań nr 5
Zmienne stanu
1. Korzystając z metody bezpośredniej wyznaczyć równania stanu dla obiektu o transmitancji
)
(s
G
przy zerowych warunkach początkowych:
a.
2
3
2
)
(
2
s
s
s
G
c.
6
4
2
1
2
)
(
2
s
s
s
s
G
b.
6
2
4
)
(
2
3
s
s
s
G
d.
3
3
1
)
(
2
3
s
s
s
s
G
2. Korzystając z metody równoległej wyznaczyć równania stanu dla obiektu o transmitancji
)
(s
G
przy zerowych warunkach początkowych:
a.
6
5
1
)
(
2
s
s
s
G
c.
4
3
5
,
0
3
5
,
0
)
(
2
s
s
s
s
G
b.
5
6
1
2
)
(
2
s
s
s
s
G
d.
6
4
2
10
)
(
s
s
s
s
s
G
3. Korzystając z metody szeregowej wyznaczyć równania stanu dla obiektu o transmitancji
)
(s
G
przy zerowych warunkach początkowych:
a.
2
2
1
)
(
s
s
G
c.
4
1
4
)
(
s
s
s
s
s
G
b.
4
6
2
4
)
(
2
s
s
s
G
d.
2
2
)
(
2
s
s
s
s
G
4. Dane są równania stanu:
)
(
)
(
)
(
)
(
)
(
)
(
s
U
s
s
Y
s
U
s
s
s
D
CX
B
AX
X
Wyznaczyć transmitancję
)
(s
G
.
a.
1
1
1
1
A
,
1
0
B
,
0
1
C
,
0
D
d.
4
3
2
1
A
,
2
1
B
,
1
0
C
,
0
D
b.
1
2
2
1
A
,
1
1
B
,
0
1
C
,
0
D
e.
3
3
2
2
A
,
4
4
B
,
1
1
C
,
0
D
c.
2
1
1
2
A
,
0
1
B
,
0
1
C
,
0
D
f.
1
3
1
2
A
,
2
1
B
,
2
2
C
,
0
D
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron