Modelowanie procesów przej
ś
ciowych w silnikach indukcyjnych
Witam serdecznie w serwisie poświęconym zagadnieniu modelowania stanów
przejściowych w silnikach indukcyjnych. Serwis powstał z myślą o osobach, dla których
modelowanie silników indukcyjnych jest zagadnieniem nowym jak i dla tych, którzy mają
już pewne doświadczenie w modelowaniu maszyn elektrycznych.
Duża atrakcją serwisu jest możliwość pobrania programu komputerowego, pozwalającego
na symulacje rozruchu silnika indukcyjnego przy rozmaitych warunkach zasilania i
obciążenia.
Zainteresowani programem będą mogli sprawdzić go w przykładowych zastosowaniach,
uzupełnianych o komentarz. Zachęcam do lektury.
Wstęp
Modelowanie stanów nieustalonych w silnikach asynchronicznych
Poniższy artykuł jest pierwszym z całej serii dotyczących modelowania silnika indukcyjnego.
W dalszych rozważaniach dla uproszczenia rozważań zostaną pominięte pewne zjawiska
zachodzące w prawdziwych silnikach elektrycznych, takie jak wszelkie nieliniowości
związane
z nasycaniem obwodów magnetycznych czy też zjawisko naskórkowości.
Jednak nawet te najprostsze przykłady mogą wnieść wiele ciekawych informacji dla osób
zainteresowanych tematem modelowania, a zwłaszcza dla tych którzy swoje zmagania z tym
zagadnieniem dopiero rozpoczynają. Miłej lektury.
Z jakiego powodu modelujemy stany nieustalone?
Silniki asynchroniczne są obecnie najbardziej upowszechnionym rodzajem napędu
elektrycznego. Niewątpliwą zaletą silników tego typu jest prostota ich budowy gwarantująca
długie i niezawodne działanie, łatwość naprawy i konserwacji, oraz prosty do
przeprowadzenia rozruch. Do wad zaliczyć należy pobór mocy biernej indukcyjnej z sieci
zasilającej.
Zestawienie dwu ostatnich cech predestynuje silniki indukcyjne do pracy w cyklach: rozruch
– nawrót, rozruch – hamowanie dynamiczne, czy też rozruch - wybieg, podczas których silnik
pracuje w stanie ustalonym stosunkowo krótko. Znajomość zjawisk zachodzących podczas
stanów przejściowych (rozruchu, nawrotu, hamowania itp.) pozwala lepiej zaprojektować
układy przeniesienia napędu tak aby unikać stanów awaryjnych, wydłużyć ich żywotność,
wreszcie zoptymalizować układy napędowe pod względem konstrukcyjnym i ekonomicznym.
Pociąga to za sobą konieczność stworzenia aparatu analizy teoretycznej pozwalającego ocenić
zachowanie się silnika w zadanym trybie pracy, zanim silnik zostanie zamontowany na
stanowisku roboczym.
Szeroko rozpowszechnione są dwie metody obliczania stanów nieustalonych, pierwsza z nich
nazywana jest metodą operatorową druga całkowaniem numerycznym.Metoda operatorowa
ma zastosowanie do obwodów liniowych. Podstawową zaletą tej metody jest możliwość
wyznaczania poszczególnych składowych przebiegu przejściowego. Mimo ograniczeń
zastosowania metody do obwodów liniowych może zostać ona wykorzystana do analizy
stanów przejściowych w silniku indukcyjnym. Przyjmując stałą prędkość, równania opisujące
silnik stają się liniowe i analiza metodą operatorową staje się możliwa Licząc stan nieustalony
dla kolejnych wartości prędkości otrzymuje się dokładny opis procesu przejściowego w
silniku np. rozruchu, nawrotu, hamownia.
Metody całkowania numerycznego pozwalają dokładnie odwzorować rzeczywiste procesy
zachodzące w silniku. Odwzorowanie to jest tym bliższe rzeczywistości im dokładniejszy jest
model silnika. W silniku występuje szereg zjawisk, których odtworzenie jest bardzo trudne.
Takim zjawiskiem jest np. zmniejszenie reaktancji rozproszenia na skutek nasycenia się
części zębowej jarzma. Zjawisko to zachodzi podczas rozruchu kiedy płynące przez
uzwojenia prądy kilkakrotnie przekraczają prąd znamionowy, wytwarzając tym samym
odpowiednio większe strumienie magnetyczne. Innym efektem jest zjawisko wypierania
prądu, powstaje ono w specjalnych konstrukcjach silników np. silniki głębokożłobkowe.
W typowych konstrukcjach ma ono jednak marginalne znaczenie. Na przedstawionych
przykładach widać, że silnik indukcyjny zmienia swoje parametry podczas zmiany stanu
pracy. Zaletą metody numerycznej jest więc to, że stosując odpowiednio sformułowany model
można uchwycić wszystkie zachodzące w silniku procesy.
Obwody RL
Na początek trochę teorii obwodów RL
Stan nieustalony w obwodzie RL po załączeniu napięcia zmiennego
Wiadome jest że procesy przejściowe w obwodzie zawierającym indukcyjność
zdeterminowane są prawem ciągłości energii zgromadzonej w polu magnetycznym cewki.
Skutkiem tego jest warunek niezmienności wartości prądu płynącego przez indukcyjność
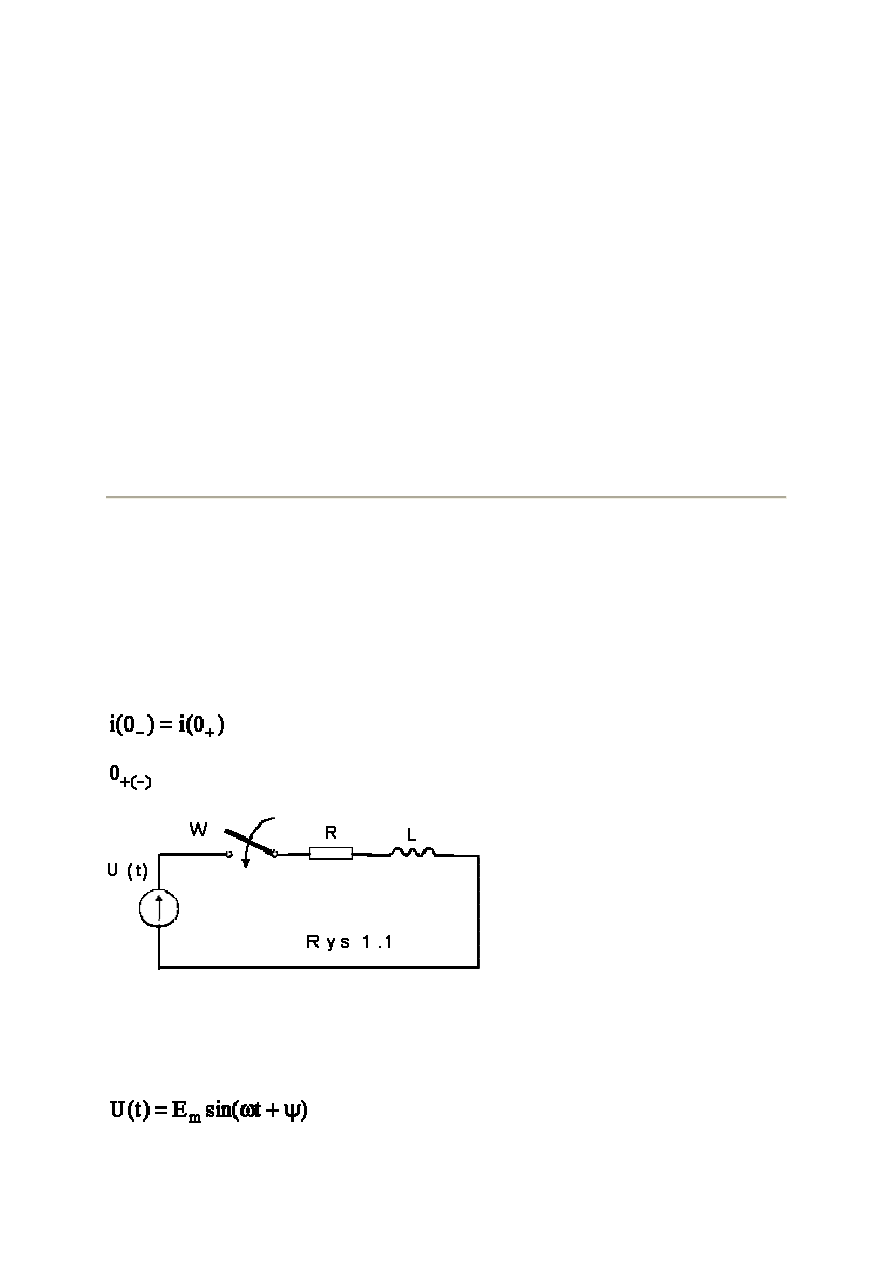
przed i po zaburzeniu:
chwila przed i po wystąpieniu zaburzenia
Rys 1 - 1 Obwód RL
Na rysunku 1.1 przedstawiono obwód złożony z elementów RL, do którego zastało załączone
wyłącznikiem W napięcie sinusoidalnie zmienne:
obwód można opisać równaniem napięciowym o następującej postaci:
Zgodnie z metodą klasyczną, przebieg czasowy prądu jest superpozycją dwu przebiegów,
składowej ustalonej i składowej przejściowej. Składowa ustalona opisana jest wyrażeniem:
gdzie:
Składową przejściową wyznacza się jako całkę ogólna równania napięciowego jednorodnego
(zerowe wymuszenie napięciowe), składowa ta wynosi:
gdzie:
natomiast:
stałą całkowania, wynikającą z warunku początkowego.
Jeżeli warunki początkowe były zerowe tzn.
to:
stąd:
Wypadkowa zależność określająca przebieg czasowy prądu ma postać
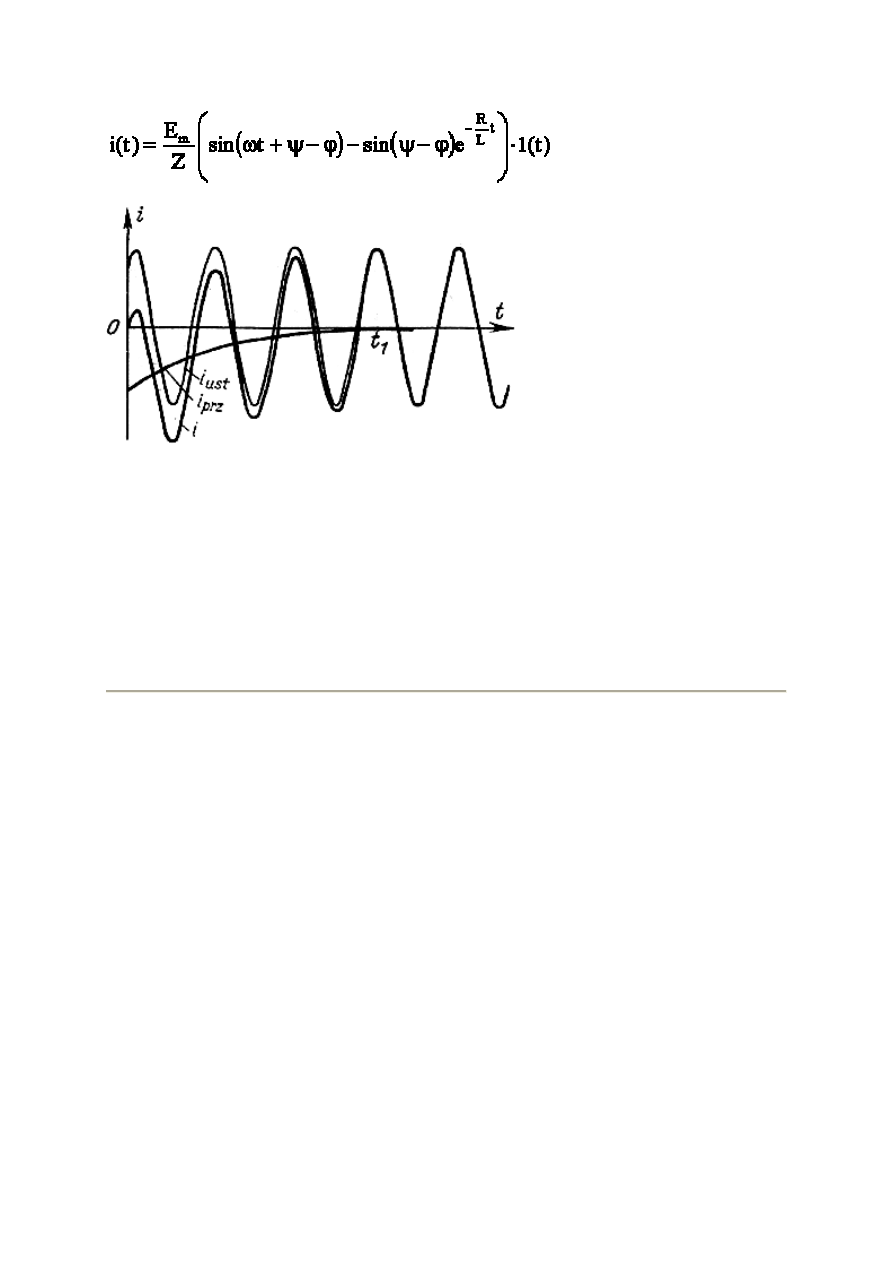
Rys 1 . 2 przebieg prądu przejściowego po załączeniu napięcia sinusoidalnie zmiennego na
obwód RL
Zawiera on obie składowe ustaloną i przejściową. Przykładowy przebieg przedstawiono na
rysunku numer 1.2. Widoczne jest że na skutek sumowania się składowych przejściowej i
ustalonej wypadkowa chwilowa wartość przebiegu jest większa niż wartość ustalona.
Spostrzeżenie to będzie miało istotne skutki dla dalszych rozważań elektromagnetycznych
stanów przejściowych w maszynie indukcyjnej.
Rozruch
Procesy przejściowe silniku indukcyjnym podczas rozruchu
Maszynę indukcyjną można potraktować jako złożony obwód RL o parametrach zmiennych
w czasie. Podobnie wiec jak w przypadku załączania napięcia sinusoidalnego na obwód
zawierający indukcyjność i rezystancję, w momencie załączania silnika asynchronicznego na
napięcie zasilające, w prądzie każdego pasma fazowego pojawi się składowa przejściowa i
ustalona prądu. Pojawienie się składowej przejściowej rzutować będzie na właściwości
mechaniczne maszyny.
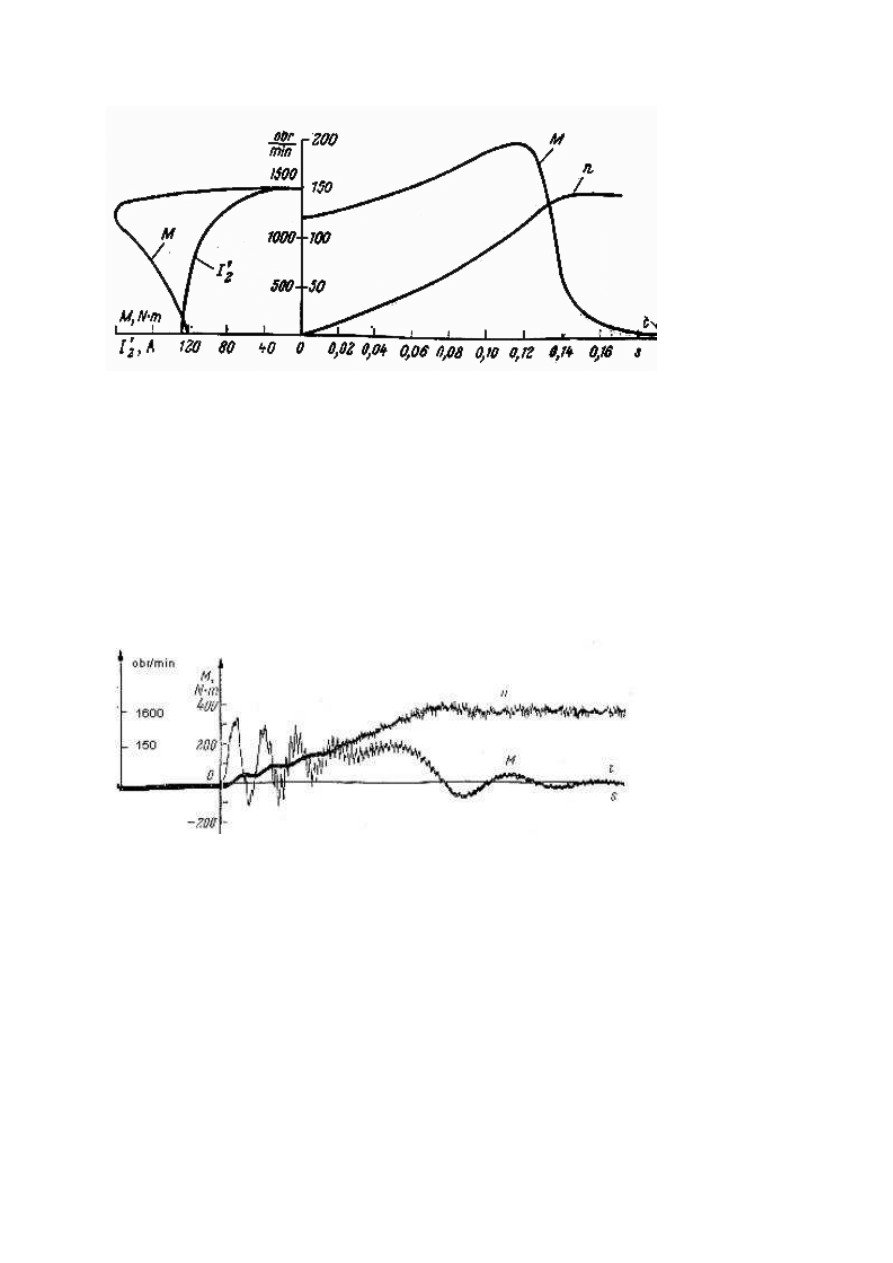
Rys 1 . 3 Charakterystyki statyczne silnika SBJd 64b
Dla przykładu na powyższym rysunku 1.3 przedstawiono statyczną charakterystykę
mechaniczną silnika SBJd 64b o mocy Pn = 14 kW. Oraz pokazano zależności momentu i
prędkości obrotowej podczas rozruchu uzyskane poprzez rozwiązanie równania ruchu gdzie
moment elektryczny maszyny wyznaczono na podstawie zależności Klossa.
Kolejny, poniższy rysunek 1.4, przedstawia zaś zależności momentu mechanicznego i
prędkości od czasu dla tego samego silnika uzyskane w czasie pomiarów laboratoryjnych:
Rys 1.4 Badania oscylograficzne rozruchu silnika indukcyjnego
Z rysunku 1.4 wynika iż maksymalna wartość momentu rozruchowego w początkowej części
procesu przejściowego jest 2,8 razy większa od momentu rozruchowego wyznaczonego
według charakterystyki statycznej. Różnica ta wynika z właściwości procesów przejściowych
w obwodach RL, w trakcie których wartości prądów rzeczywistych silnika są znacznie
większe niż amplitudy prądów ustalonych. Wyraźnie widoczne są oscylacje momentu
elektromagnetycznego i prędkości obrotowej silnika. Dzieje się tak bowiem pola wirujące
powstałe pod działaniem składowych prądów ustalonej i przejściowej nie są w przypadku
ogólnym nieruchome jedno względem drugiego. Pola wytwarzane przez prądy przejściowe
mogą bądź wzmacniać bądź też osłabiać pole główne wytwarzane przez prądy ustalone,
powodując w ten sposób wzmocnienie bądź osłabienie przejściowego momentu
elektromagnetycznego. W wyniku oddziaływania prądów przejściowych pola magnetyczne
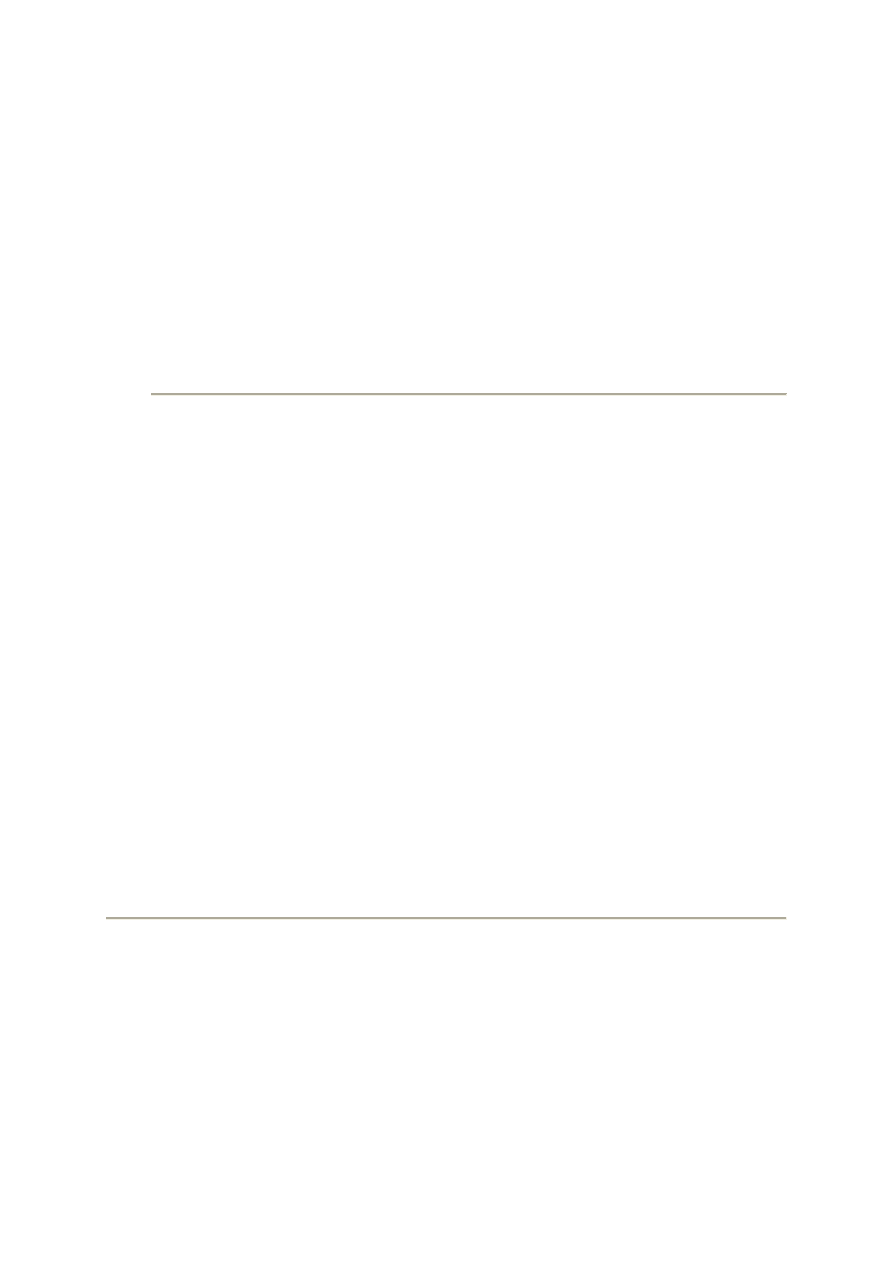
mogą być chwilowo tak skierowane, że znajdujące się obok siebie bieguny magnetyczne
stojana i wirnika będą się odpychać i działać na wirnik w kierunku przeciwnym do kierunku
wirowania.
W końcowej fazie rozruchu na skutek bezwładności wirnika prędkość rośnie ponad wartość
prędkości synchronicznej, powodując powstanie ujemnego momentu obrotowego (praca
prądnicowa silnika). Następuje wyhamowanie silnika do prędkości podsynchronicznej i
moment osiąga ponownie wartości dodatnie. Oscylacje wywoływane bezwładnością silnika
gasną tłumione i prędkość silnika ustala się na wartości odpowiadającej momentowi
obciążenia. Dalej silnik pracuje w stanie ustalonym gdzie wartości momentu, prędkości i
prądów wyznaczyć można w oparciu o charakterystyki statyczne.
Modelowanie
Modelowanie procesów przejściowych
Modelowanie silnika indukcyjnego, który jest złożonym układem indukcyjności polega
na sformułowaniu równań równowagi elektrycznej i mechanicznej. Model silnika
może, ale nie musi być dokładnym odwzorowaniem budowy elektrycznej silnika,
cechować się powinien jednak odtworzeniem przepływów magnetycznych tak jak w
rzeczywistym silniku. Układ cewek zostaje opisany równaniami różniczkowymi,
charakteryzującymi sprzężenia magnetyczne pomiędzy nimi.
Następnie rozwiązuje się przygotowany układ równań poprzez całkowanie numeryczne.
Całkowanie numeryczne rozpoczyna się przyjmując pewne warunki początkowe,
zależnie od charakteru procesu mogą to być początkowe wartości prądów lub
początkowa prędkość obrotowa. W celu wyeliminowania ewentualnych błędów
spowodowanych usterkami algorytmów numerycznych, czy też niewłaściwymi danymi,
otrzymane wyniki poddaje się analizie. Sprawdza się czy charakter modelowanych
procesów jest zgodny z rzeczywistością, oraz czy obliczone wartości odpowiadają
zarejestrowanym wartością podczas prób laboratoryjnych.
Model ABC
Model matematyczny silnika asynchronicznego w rzeczywistym układzie osi odniesienia
ABC
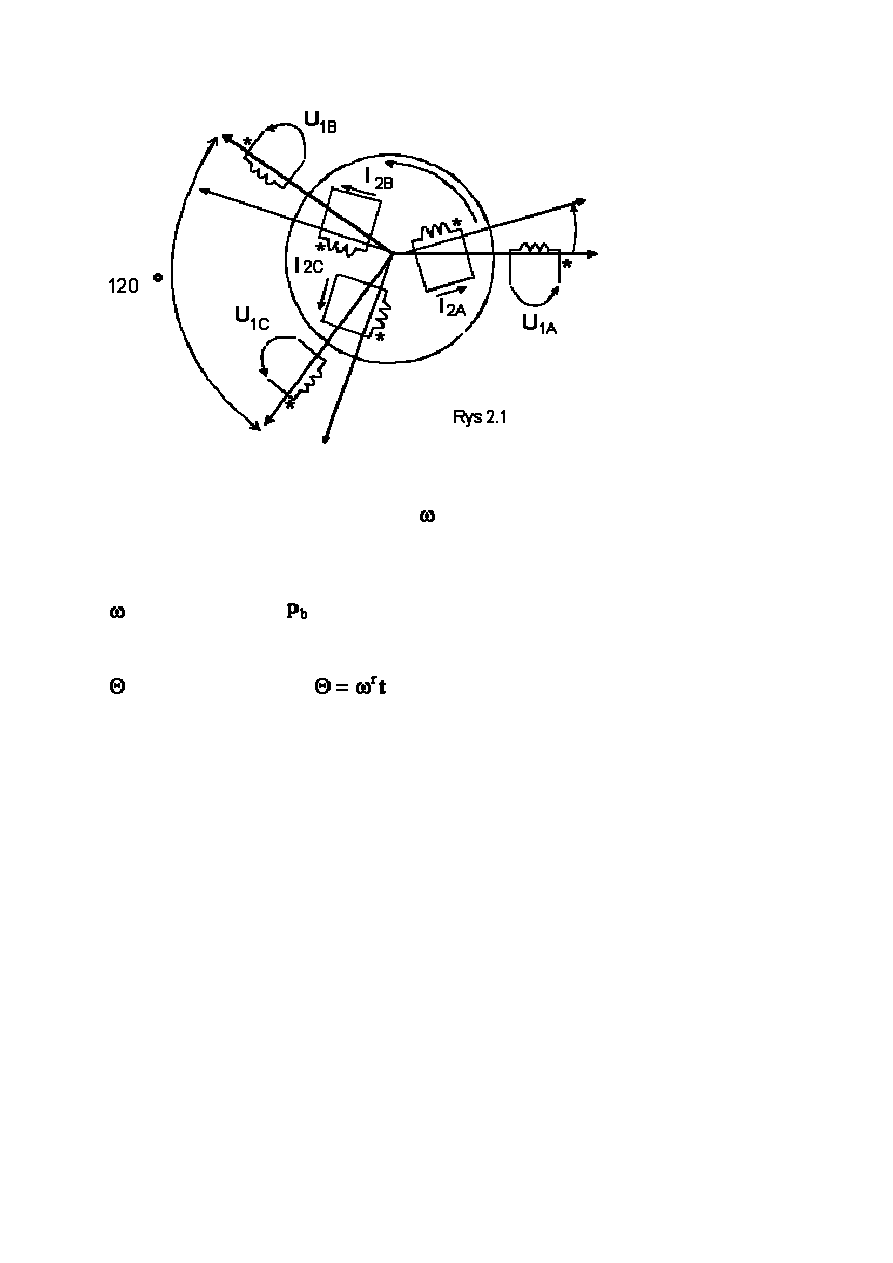
Rys 1.1 Model silnika w układzie osi ABC, * - oznacza zaciski jednako imienne
Rysunek 2.1 przedstawia układ osi trójfazowego silnika indukcyjnego.
Wirnik silnika wiruje z prędkością kątową
Wprowadza się wielkość nazywaną elektryczną prędkością kątową, równą iloczynowi
prędkości kątowej
i ilości par biegunów
.
Chwilowe położenie wirnika zwane drogą kątową
i wyraża się zależnością:
.
Przyjmuje się kąty liczone w lewo za dodatnie, w prawo za ujemne.
W celu opisania elektromagnetycznych procesów przejściowych silnika asynchronicznego
niezbędne jest ułożenie równań
równowagi elektrycznej i mechanicznej. Przy formułowaniu równań przyjmuje się
następujące założenia:
a) nie uwzględnia się nasycenia obwodu magnetycznego silnika,
b) nie uwzględnia się strat mocy w rdzeniu (przemagnesowanie bez histerezy),
c) nie uwzględnia się wpływu żłobków,
d) przyjmuje się symetryczne uzwojenie trójfazowe,
e) poszczególne pasma fazowe stojana sprzęgają się między sobą poprzez nieskończony ciąg
harmoniczny sprzężeń magnetycznych ,
f) poszczególne pasma fazowe wirnika podobnie jak w przypadku pasm fazowych stojana,
sprzęgają się między sobą poprzez nieskończony ciąg harmonicznych,
g) stojan z wirnikiem sprzęgają się poprzez harmoniczną podstawową (
) wirującego
pola magnetyczne
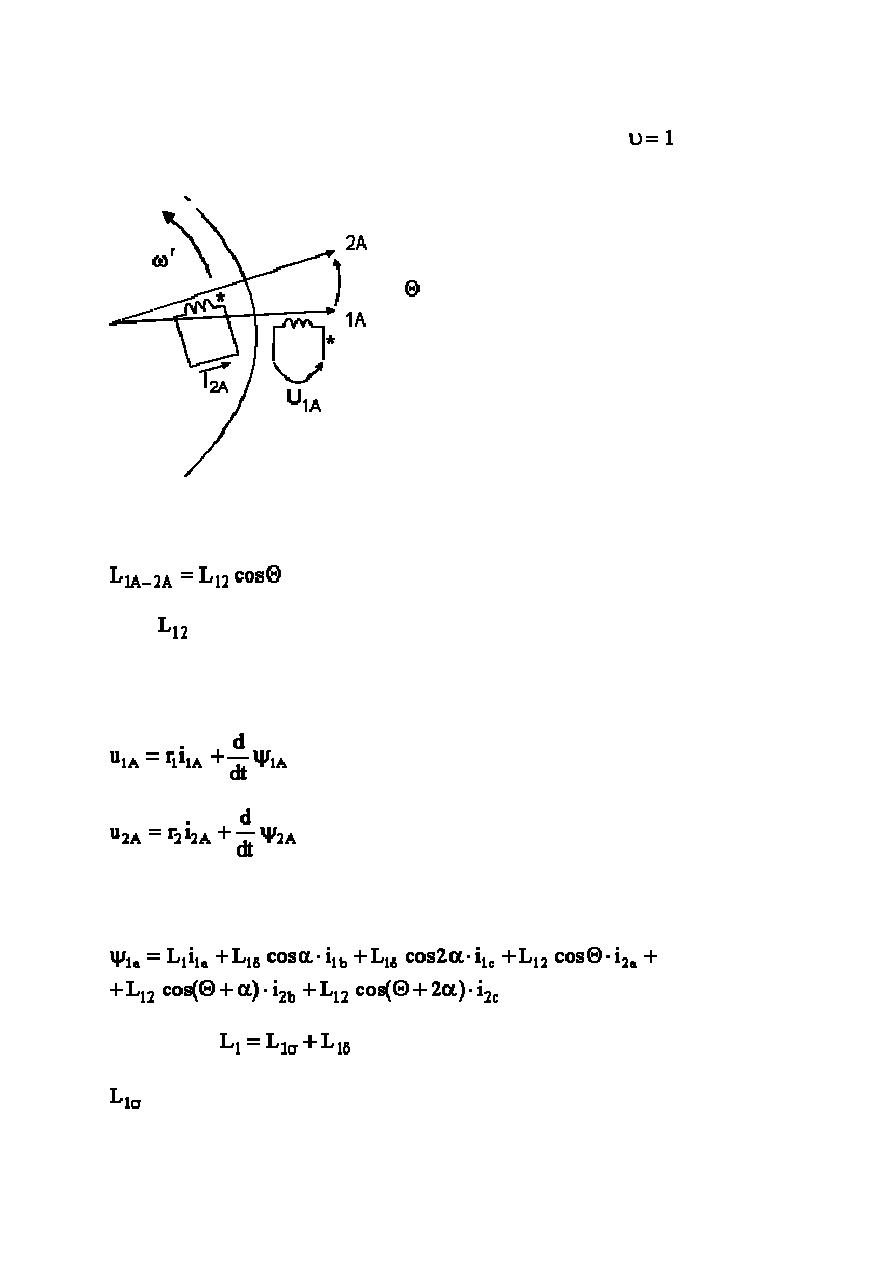
Rysunek 2.2 przedstawia dwa wybrane pasma silnika indukcyjnego. Pasmo 1A stojana i 2A
wirnika.
Indukcyjność wzajemna pomiędzy pasmami1A i 2A będzie opisana zależnością:
gdzie:
jest to indukcyjność wzajemna pomiędzy pasmami w momencie gdy ich osie
pokrywają się.
Równania napięciowe dla obu pasm przybiorą postać:
strumienie skojarzone opisywane są:
Indukcyjność
gdzie:
jest indukcyjnością rozproszenia pasma fazowego,
jest indukcyjnością własną pasma.
Natomiast wyrażenie
opisuje cały strumień wytworzony danym paśmie,
będący sumą strumienia rozproszenia, oraz strumienia głównego przechodzącego przez
szczelinę powietrzną.
Wyrażenia
opisują
strumienie magnetyczne pochodzące kolejno od pasma fazowego B oraz C stojana, a
sprzęgające się z rozpatrywanym pasmem A.
Składnik
opisuje
trzy strumienie magnetyczne wytwarzane przez kolejne (A,B,C) pasma fazowe wirnika a
sprzęgające się z pasmem A stojana.
Równania napięciowe całego silnika przybiorą postać:
stojan:
(1.1)
wirnik:
(1.2)
Uwzględniając wyrażenia opisujące strumienie skojarzone, równania napięciowe przedstawia
się za pomocą prądów i indukcyjności,
stosując reguły rachunku macierzowego otrzymamy:
Stojan:
(1.3)
Napięcia fazowe U1 są sumą spadku napięcia wywołanego przepływem prądów fazowych, na
rezystancjach fazowych
,
spadku napięcia na indukcyjnościach rozproszenia i głównych
,
oraz napięcia indukowanego przez prądy wirnika - składnik
.
Gdzie:
(1.4)
- macierz napięć fazowych
(1.5)
- prądy fazowe stojana
(1.6)
- prądy fazowe wirnika
(1.7)
- macierz rezystancji fazowych
(1.8)
- macierz indukcyjności rozproszenia
Z uwagi na niesinusoidalny rozkład pola wzdłuż szczeliny magnetycznej macierz
indukcyjności głównych uzwojeń stojana jest ciągiem harmonicznych:
- kolejne harmoniczne
gdzie:
(1.9)
kąt
Indukcyjność własną pasma fazowego stojana dla
- tej harmonicznej
, wyznacza się z
zależności:
gdzie:
- ilość zwojów pasma wirnika
- współczynnik uzwojenia wirnika dla
- tej harmonicznej
Indukcyjność wzajemna wirnik - stojan:
(1.12)
Macierz indukcyjności wzajemnej wirnik stojan jak widać, zależy nie tylko od kąta
ułożenia przestrzennego
uzwojeń względem siebie ale i od
, kąta obrotu wirnika.
Natomiast
to indukcyjność wzajemna pasmo stojana - pasmo wirnika, dla harmonicznej
podstawowej
(zakłada się że wirnik - stojan sprzęgają się poprzez harmoniczną podstawową) wynosi:
(1.13)
;
Jest to indukcyjność wzajemna przy współosiowym ustawieniu pasm fazowych stojana i
wirnika.
Wprowadza się wyrażenie nazywane przekładnią
, określaną dla harmonicznej
podstawowej:
(1.14)
Oraz oznaczając jako
indukcyjność własną pasma stojana dla harmonicznej podstawowej czyli:
otrzyma się wyrażenie na indukcyjność wzajemną pasmo wirnik -pasmo
stojan w postaci:
(1.15)
Dla ułatwienia dalszych przekształceń wprowadza się następujący zapis macierzy
indukcyjności.
Indukcyjność własna i wzajemna pasm fazowych stojana:
(1.16)
gdzie :
W podobny sposób przedstawia się macierz indukcyjności wirnika
macierze
bowiem liczba pasm fazowych w wirniku
jest taka sama jak w stojanie
.
Macierz indukcyjności wzajemnych stojan wirnik przedstawia się natomiast w postaci:
(2.17)
gdzie:
;
macierz:
wyrażona jest:
(12.18)
Wirnik:
Uzwojenia wirnika są zwarte stąd:
(1.19)
gdzie:
Moment obrotowy:
(1.20)
Równanie ruchu:
(1.21)
gdzie:
- prędkość kątowa elektryczna wirnika;
- moment bezwładności napędu - sprowadzony do wału silnika
Tak więc przygotowane są równania modelu silnika w układzie osi odniesienia ABC.
Modelowanie silnika w tym układzie jest dość żmudne gdyż wymaga rozwiązania układu 7
równań,
w których dodatkowo zmieniają się współczynniki.
Jeśli więc ujmiemy układ równań w kod języka programowania całe wyrażenie wraz z
równaniami
pomocniczymi (obliczającymi zmienne współczynniki) będzie dość złożone.
Dla tego nie poleca się stosowania tego modelu. Dla zmniejszenia ilości równań stosuje się
specjalne
przekształcenia matematyczne, zwane transformacjami, w wyniku czego otrzymuje się nieco
inne
modele zgrabniejsze i łatwiejsze w użyciu.
O tych modelach już w następnych artykułach.
Należy jeszcze dodać iż stosowanie modelu ABC może mieć sens w przypadku jeśli
modelowany
silnik jest częścią większego układu, z którym wchodzi on w interakcje, zwłaszcza gdy
zakładamy,
ż
e podczas symulacji zmieniać się będą warunki zasilania, np. zasilanie stanie się
niesymetryczne.
Wówczas należało by poddawać transformacją napięcia zasilające do ‘prostszego’ układu,
a po otrzymaniu wyników transformować wartości prądów z powrotem do układu ABC.
Nakład czasu na obliczenia mógłby wówczas przewyższyć wysiłki modelowania w układzie
ABC.
Transformacje
Transformacje modeli matematycznych silnika
Przedstawiony w poprzednim artykule opis matematyczny silnika indukcyjnego w naturalnym
układzie osi ABC odpowiada bezpośrednio rzeczywistości.
Przy modelowaniu stanów nieustalonych w układzie ABC należy rozwiązać układ siedmiu
równań różniczkowych
o współczynnikach zależnych od czasu bowiem macierz indukcyjności wzajemnych stojan
wirnik
jest zależna od drogi kątowej wirnika
, wartości współczynników układu
równań będą zmieniać się w czasie, tak jak będzie zmieniała się wartość
.
Z uwagi na ilość równań i zmienność wartości ich współczynników, poszukiwanie rozwiązań
dla modelu w układzie ABC jest utrudnione. Z tego powodu dokonuje się transformacji
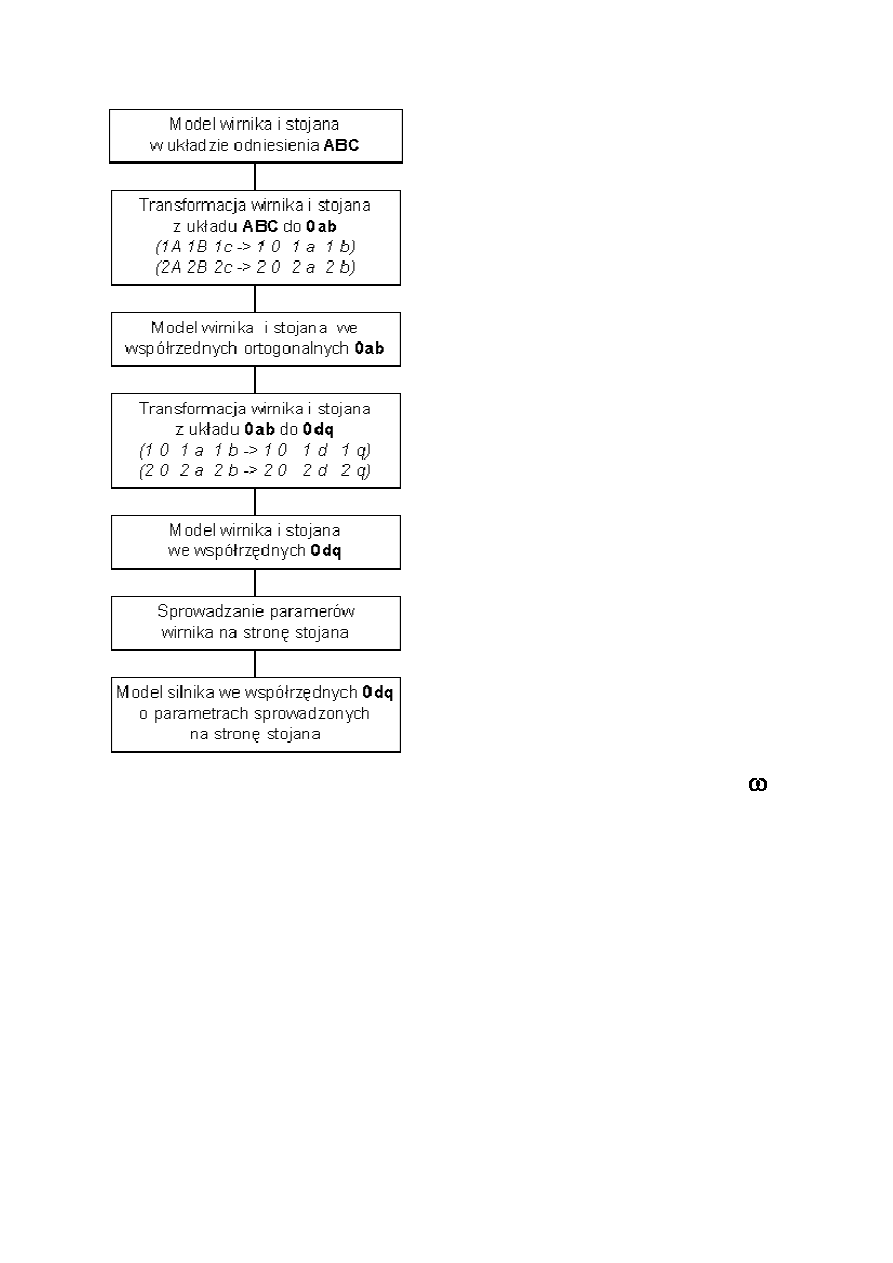
modelu silnika z układu ABC do innego układu współrzędnych.
Poniżej wymieniono stosowane układy odniesienia, w raz z wprowadzanymi przez nie
zmianami.
•
układ współrzędnych ortogonalny Oab (zero - a - b, zmniejsza ilość równań
różniczkowych (pięć równań)
•
układ współrzędnych ortogonalny Odq (zero - d -q) zmniejsza ilość równań
różniczkowych (pięć równań),
a ponadto daje stałe współczynniki równań
Dzięki odpowiednim przekształceniom matematycznym zwanym transformacjami, można
przejść z jednego modelu matematycznego do innego. Zasadniczo prawie zawsze symulacje
wykonuje się w układach osi odniesienia innych niż ABC. Otrzymane w ten sposób wyniki
należy poddać transformacji powrotnej do układu ABC. Powyższa uwaga dotyczy tylko
prądów i strumieni, wartości momentu i prędkości są niezależne od modelu w jakim
dokonano obliczeń (transformacja jest niezmiennicza względem mocy).
Zasady transformacji modeli matematycznych silnika
Wprowadza się oznaczenia:
- macierz transformacyjne stojana
- macierz transformacyjne wirnika
Macierze transformacyjne są zbiorami zależności trygonometrycznych przeprowadzających
układ X w układ Y
Ogólny zapis przekształceń wygląda następująco, dla stojana:
- wielkości fazowe stojana - wejściowe do przekształcenia;
- macierz przekształcająca (transformacji);
- wielkości wyjściowe - przekształcone;
Przekształcenie odwrotne stojana:
Ze względu na to że macierz transformacyjna
jest macierzą ortogonalną, spełnia ona zależność
; więc przekształcenie odwrotne:
W podobny sposób transformuje się zmienne wirnika:
- wielkości fazowe wirnika - wejściowe do przekształcenia;
- macierz przekształcająca;
- wielkości wyjściowe - przekształcone;
Przekształcenie odwrotne wirnika:
Idea wyznaczania macierzy transformacji na przykładzie przejścia z modelu ABC do modelu
0dq.
W warunkach symulacji procesów przejściowych tego typu jak rozruch nawrót i innych, w
których struktura stojana jest symetryczna t oznaczy że stojan posiada trzy identyczne
uzwojenia rozłożone ze stałym katem
Sprowadza się uzwojenia stojana jak i wirnika do równoważnego uzwojenia dwufazowego.
Macierz transformacyjna jest jednakowa dla stojana i wirnika i ma postać:
gdzie:
macierz transformacyjna ABC -> 0ab
Składowe 0ab są określone w następujący sposób:
Proszę zauważyć że macierz transformacyjna jest macierzą 2x3 czyli z trójelementowego
wektora wielkości wejściowych otrzymamy dwuelementowy wektor wielkości wyjściowych.
I to jest podstawowa zaleta powyższego przekształcenia matematycznego dzięki niemu
bowiem trójfazowy układ pasm stojana i wirnika redukujemy do dwu fazowego stojana i dwu
fazowego wirnika, a co za tym idzie redukujemy i liczbę równań opisujących silnik.
Uzwojenie dwufazowe, tj. składowe ab generowane są przez drugi i trzeci wiersz macierzy
transformacyjnej
. Pierwszy wiersz tej macierzy określa tzw. składową zerową, którą
można interpretować jako autonomiczne uzwojenie jednofazowe nie sprzęgnięte z
dwufazowym ab.
Model 0ab silnika ma więc dwufazowe uzwojenie stojana i dwufazowe uzwojenie wirnika,
wirujące z prędkością
kątową
. Silnik opisany jest układem pięciu równań (cztery równania napięciowe i jedno
równanie ruchu), których współczynniki są funkcją kąta
. Dalsze uproszczenie to
uniezależnienie współczynników równań od
.
W celu wyeliminowania zależności parametrów modelu od
dokonuje się transformacji do
układu osi 0dq. Jest to układ osi stojana i wirnika nieruchomych względem siebie. Układ ten
może w ogólnym przypadku wirować w przestrzeni z dowolną prędkością
. W układzie
0dq sprzężenia stojan – wirnik nie zalezą od
. Układ równań ma więc stałe współczynniki.
W ten sposób przechodząc więc od układu doniesienia ABC do 0ab i 0dq, uzyskujemy
uproszczenie modelu silnika pozwalające zamknąć opis do pięciu równań względnie łatwych
do obróbki numerycznej. Uproszczenie takie okaże się szczególnie cenne gdy ... zaczniemy
komplikować układ równań opisujących silnik. Proszę zauważyć w naszych rozważaniach
przyleliśmy daleko idące uproszczenia, zakładamy liniowość obwodu magnetycznego,
zakładamy brak występowania zjawiska naskórkowości.
W rzeczywistości wszystkie te zjawiska występują i ich oddziaływania dobry model nie
powinien pomijać. Reasumując uwzględnienie nieliniowości i naskórkowości wiąże się ze
zmianą wartości współczynników równań, czyli indukcyjności
i rezystancji modelowanych uzwojeń. Gdyby jeszcze uwzględniać zmienność tych
parametrów ze zmianą
w sześciu równaniach napięciowych modelu w układzie ABC to
stanielibyśmy przed poważnym problemem praktycznego wykonania tego zadania.
Proces transformacji wynika z rzutowania wektora wielkości naturalnej na odpowiednią oś
układu docelowego. Wielkość transformowana w nowym układzie będzie więc funkcją
odpowiedniej zależności trygonometrycznej.
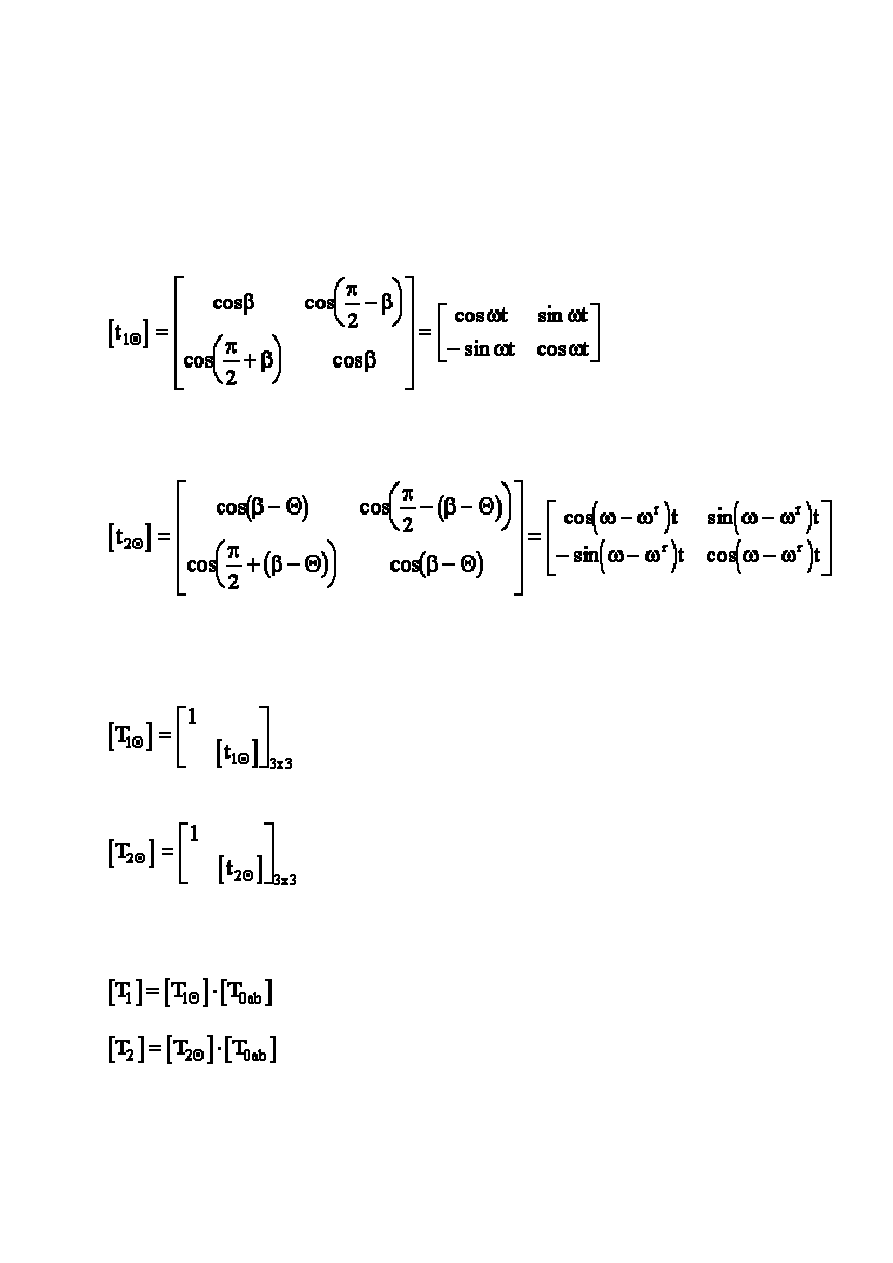
Macierz transformacyjna 0ab -> 0dq
Otrzymuje się więc odpowiednie zależności „przeprowadzające” układ osi stojana 0ab w
układ 0dq:
Natomiast dla wirnika:
Macierze transformacyjne uwzględniając składowe zerowe będą określone:
stojan;
wirnik;
Pełne macierze transformacji z układu współrzędnych ABC do wirującego układu osi Odq
mają następującą postać:
stojan
wirnik.
Rozpisując dokładnie, po poddaniu elementarnym przekształceniom:
stojan:
wirnik:
Model 0dq
Model matematyczny do analizy rozruchu i nawrotu
Korzystając z macierzy transformacyjnych omówionych w poprzednim artykule,
transformujemy się stojan i wirnik
z układu ABC do układu 0dq, wirującego w przestrzeni z prędkością
.
Otrzymujemy w ten sposób dwuosiowy, czterouzwojeniowy model maszyny indukcyjnej 0dq,
który jest podstawą analizy stanów przejściowych rozruchu i nawrotu.
Ten właśnie model wykorzystano w programie S.A.T, a dokładniej równania opisujące ten
model poddano całkowaniu numerycznemu przy zadanych warunkach początkowych.
Rys. Przejście z układu osi naturalnych ABC, do układu osi dq, wirującego z prędkością
Model silnika w układzie osi 0dq:
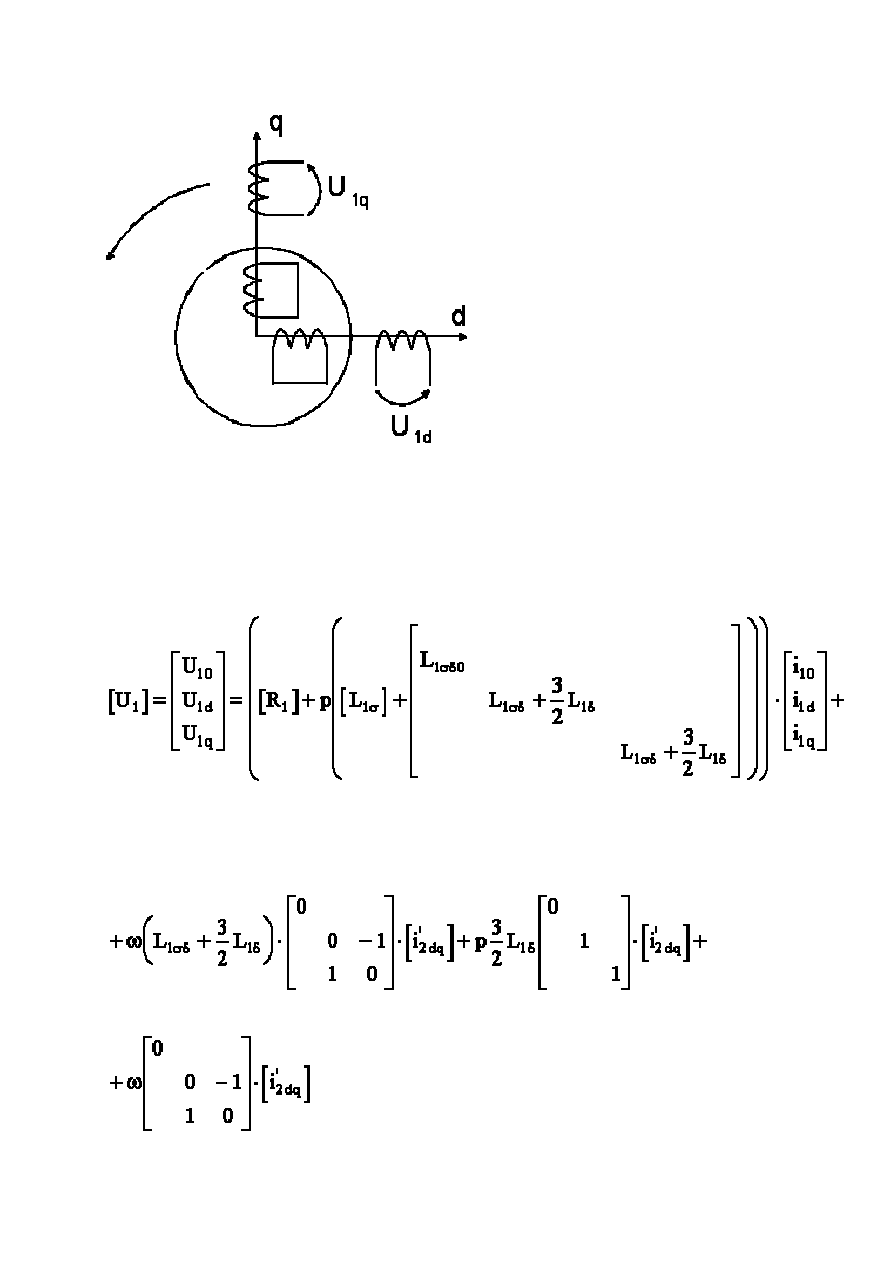
Równania silnika:
(2.79)
Stojan:
(2.80)
gdzie macierz:
to sprowadzone na stronę stojana prądy wirnika.
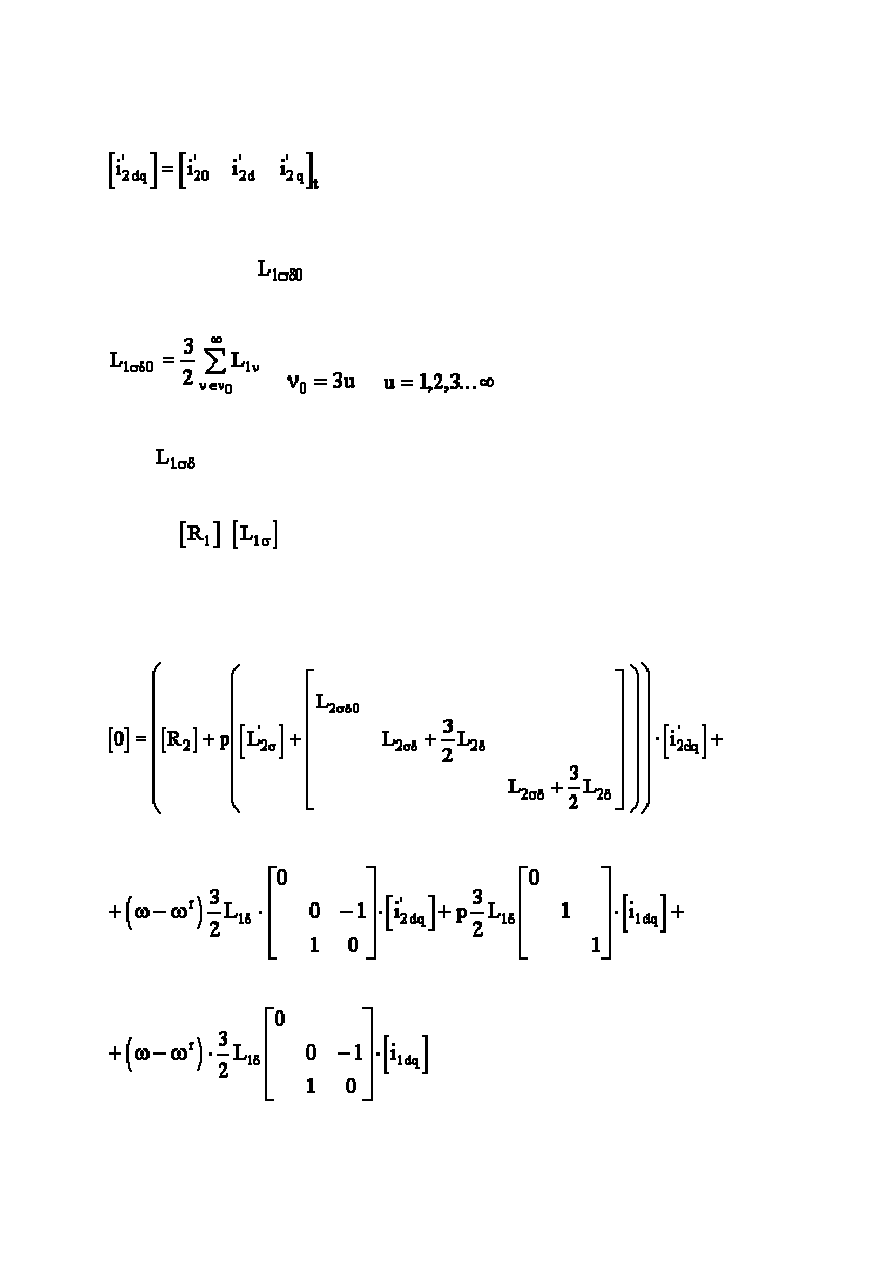
W zależności (2.80)
jest indukcyjnością tzw. rozproszenia szczelinowego stojana dla
składowej zerowej.
(za wyłączeniem parzystych
harmonicznych)
Gdzie
jest indukcyjnością rozproszenia szczelinowego dla prądów dq, równą sumie
indukcyjności stojana dla poszczególnych harmonicznych pola, wzbudzanych przez prądy dq.
Macierze
i
to macierze rezystancji i indukcyjności rozproszenia stojana
identyczne jak w układzie osi ABC.
Wirnik: ( 2.81)
Oznacza się strumienie skojarzone stojana i wirnika w osi d i q:
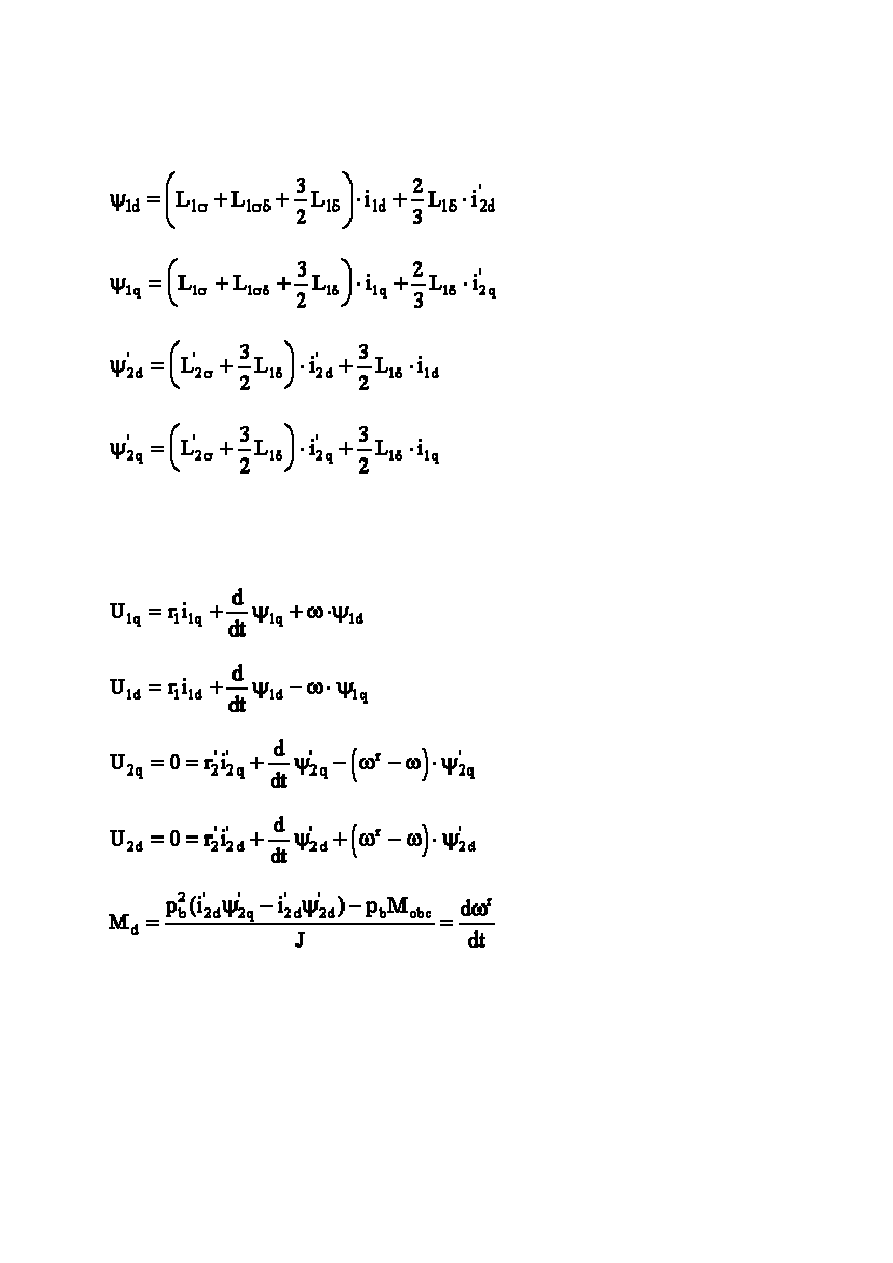
(2.82)
Modelowany układ równań w związku z tym można przedstawić:
(2.83)
Oraz prądy osiowe: (2.84)
\
gdzie:
Jeżeli przyjąć że napięcia zasilające stojan w układzie odniesienia ABC, są sinusoidalnie
zmienne i tworzą układ zgodnej kolejności to po transformowaniu do układu odniesienia 0dq
będą one określone następująco:
gdzie:
prędkość kątowa wirowania pola magnetycznego,
Ze względu na wartość
można wyróżnić trzy przypadki układu osi, i tak
•
układ przydatny do modelowania asymetrii stojanowej,
•
układ osi stacjonarny względem wirnika, szczególnie przydatny do
modelowania asymetrii wirnikowej,
•
układ osi stacjonarny względem wirującego pola, szczególnie przydatny do
modelowania maszyny symetrycznej i symetrycznie zasilanej.
Do symulacji rozruchu i nawrotu przyjęto
, a następnie otrzymane wartości prądów
stojana i wirnika
należy poddać transformacji powrotnej do układu
odniesienia ABC:
wirnik:
stojan:
W celu zaimplementowania do algorytmu obliczeniowego przygotowanego układu równań
(2.82), poddaje się równania przekształceniom, wprowadzając zamiast prądów
strumienie skojarzone
, opisane zależnością (2.83), a
następnie doprowadza się układ równań do postaci kanonicznej.
Aby określić wartości strumieni skojarzonych należy najpierw wyznaczyć macierz odwrotną
. Ponieważ macierz
jest macierzą kwadratową o wymiarach 4x4, do której macierz odwrotna
będzie
również macierzą kwadratową o wymiarach 4x4, o ogólnej postaci:
Wyrażenia określające prądy osiowe: (2.85)
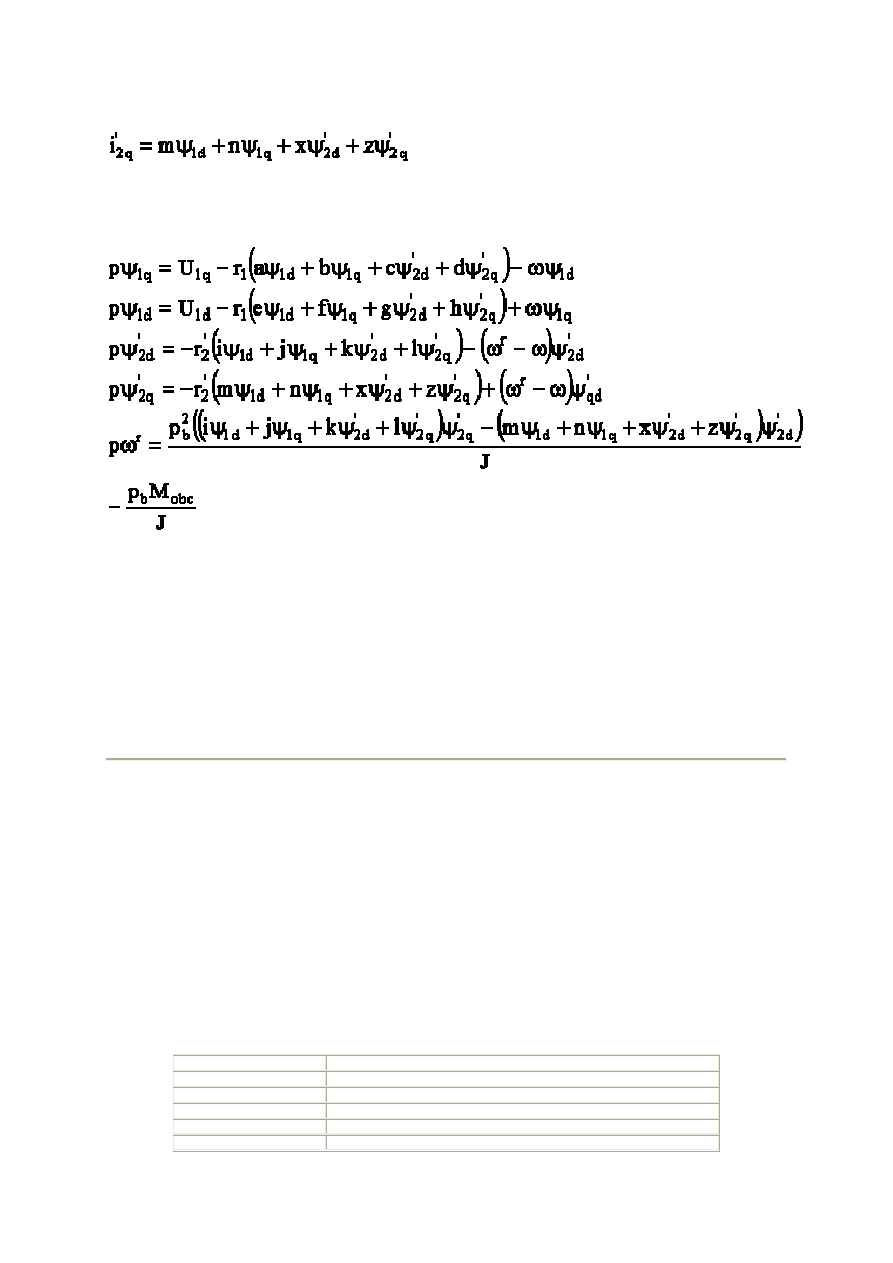
Po wstawieniu wyrażeń na prądy osiowe z równań (2.84) do układu równań (2.82) otrzymano
postać układu równań będąca podstawą algorytmu numerycznego:
Po obliczeniu strumieni skojarzonych przy pomocy metod całkowania numerycznego w
dalszym kroku obliczamy wartości prądów osiowych korzystając z zależności 2.84 i
transformujemy powrotnie prądy z układu 0dq do układu ABC. Prędkości i momentu nie
potrzeba transformować powrotnie, bowiem jak wcześniej wspominałem przedstawione
transformacje są niezmiennicze względem mocy.
Model Matlab
Symulacja rozruchu silnika klatkowego w środowisku MATLAB
Ś
rodowisko MATLAB z oczywistych powodów jest znakomitym narzędziem służącym
symulacji różnorodnych procesów zachodzących w silnikach indukcyjnych. Wielu
czytelników SAT domagało się od dawna udostępniania modelu silnika indukcyjnego
gotowego do użycia w tym środowisku. Wychodząc naprzeciw oczekiwaniom, dzięki
uprzejmości Pana Wiktora Hudego, zamieszczam gotowy do użycia model typu 0dq, wraz z
niezbędnymi skryptami.
Pakiet zawiera dwuosiowy, czterouzwojeniowy model maszyny indukcyjnej 0dq dla
ś
rodowiska Matlab, oraz skrypty umożliwiające przeprowadzenie symulacji rozruchu.
Zawartość pakietu:
Plik
Funkcja
scripts\skrypt_rk.m
Skrypt startowy przeprowadzający symulację rozruchu silnika
scripts\silnik_rk.m
różniczkowanie prądów I1d, I1q, I2d, I2q
scripts\silnik_rk_psi
różniczkowanie strumieni Psi1d, Psi1q, Psi2d, Psi2q
scripts\silnik_rkg.m
różniczkowanie prądów I1d, I1q, I2d, I2q
scripts\silnik_rkg_psi
różniczkowanie strumieni Psi1d, Psi1q, Psi2d, Psi2q
Model.pdf
Zestawienie równań stanowiących niniejszy model 0dq
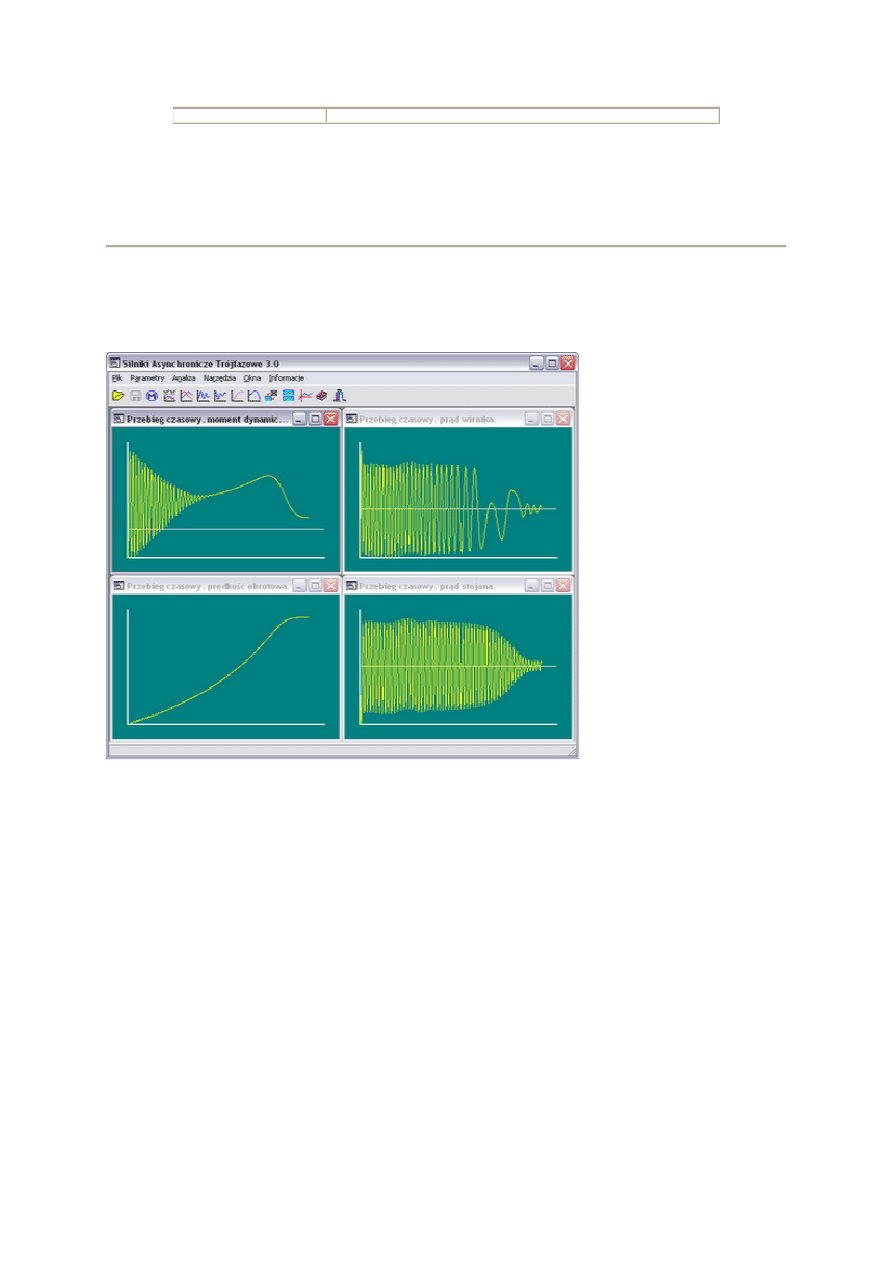
Silniki Asynchroniczne Trójfazowe 3.0
Darmowe narzędzie do symulacji rozruchu asynchronicznego trójfazowego silnika
indukcyjnego
Najnowsza wersja programu do symulacji stanów nieustalonych trójfazowego indukcyjnego
silnika pierścieniowego.
Program pomyślany jest dla jako pomoc dydaktyczna dla studentów wydziałów
elektrycznych.
Pozwala w sposób łatwy i intuicyjny zaznajomić się z przebiegami czasowymi następujących
wielkości:
•
prądu uzwojenia stojana
•
prądu uzwojenia wirnika
•
momentu elektrycznego
•
prędkości obrotowej
Przebiegi te otrzymuje się na drodze obliczeń numerycznych dla układu równań opisujących
model silnika.
Dodatkowo program umożliwia uzyskanie statycznej charakterystyki mechanicznej Me=f(s),
obliczonej na podstawie wartości przybliżonych, metodami klasycznymi (wzór Klossa)
Program pozwala na edytowania parametrów modelu matematycznego silnika, dzięki czemu
przygotowany użytkownik może dokonać symulacji dowolnego silnika. Dodatkowo program
potrafi również wyprowadzić parametry modelu ze standardowego zestawu danych
znamionowych.
Symulacje odbywać się mogą przy zmienionych warunkach zasilania np. przy zmienionym
napięcia fazowe (układ symetryczny), zmienionej częstotliwości napięcia zasilającego. Do
uzwojenia wirnika dołączyć można rezystancję dodatkową.
Moment obciążenia silnika może być stały, bać zmienny wedle prostej, lub krzywej
parabolicznej, w funkcji prędkości obrotowej.
Nowości
SAT Basic 3.0 - b10 / 24.09.2009
•
Poprawiono wykorzystanie pamięci operacyjnej komputera. Aktualnie jedynym ograniczeniem długości
trwania symulacji są zasoby komputera.
•
Wyeliminowano wiele usterek skutkujących pojawieniem się błędów wykonania i awaryjnym
zamknięciem programu
•
Usunięto usterkę modelu matematycznego skutkujący niewłaściwą interpretacją częstotliwości napięcia
zasilania, gdy ta jest różna od częstotliwości znamionowej.
•
Nowe dialogi parametrów modelu i ustawień symulacji, ułatwiają pracę początkującym użytkownikom.
•
W celu uzyskania większej kompatybilności z nowymi systemami operacyjnymi kod źródłowy
programu przekompilowano przy użyciu najnowszego środowiska programistycznego Turbo Delphi.
SAT Basic 3.0 - b16
/ 04.10.2009
•
Poprawiono rysowanie wykresów przebiegów czasowych.
•
Usunięto błąd związany z niewłaściwą czcionką opisów osi współrzędnych dla wykresu prędkości
wirnika.
SAT Basic 3.0 - b37
/ 23.03.2010
•
Opcje programu umożliwiają zmianę kolorystki wykresu
.
Informacje ogólne
Program 'Silniki Asynchroniczne Trójfazowe Basic' (SAT Basic), zwany dalej 'programem',
jest produktem 'freware' (darmowym) i jako taki podlega swobodnemu kopiowaniu i
użytkowaniu bez ponoszenia dodatkowych opłat, o ile nie zostaną naruszone poniższe
warunki.
Warunki:
•
Program jest wartością intelektualną należącą do Tomasza Jakóbiec (dalej zwanego
Autorem), zabrania się usuwania z programu i jego dokumentacji informacji o
Autorze (nazwisko, imię, telefon, email, serwis www).
•
Wszelakie publikacje programu np. w sieci Internet i na innych nośnikach
elektronicznych muszą być opatrzone tymi zapisami.
•
Zabrania się dekompilacji i wykorzystywania kodu programu bez zgody Autora.
•
Zabrania się uzyskiwania korzyści finansowych podczas udostępniania programu
innym osobom, tytułem opłat za sprzedaż, udostępnienie, wypożyczenie itp. tzn.
naruszania statusu 'freeware'.
•
Program przeznaczony jest tylko do zastosowań dydaktycznych, użycie programu jako
narzędzia projektowego jest zabronione. Autor nie ponosi odpowiedzialności za
szkody powstałe z wykorzystania programu w niedozwolony sposób.
MaszynyBasic30b10.zip
Pobierz
SAT 3.0 Basic 24.09.2009 1210 KB
wersja 2
24-09-2009 18:38 Tomasz Jakobiec
http://sites.google.com/site/silnikisat/Home/program/wersja-3-0/programy/MaszynyBasic30b10.zip?attredirects=0&d=1
MaszynyBasic30b16.zip
Pobierz
SAT 3.0 Basic 04.10.2009 1210 KB wersja 1 04-10-2009 20:08 Tomasz Jakobiec
http://sites.google.com/site/silnikisat/Home/program/wersja-3-0/programy/MaszynyBasic30b16.zip?attredirects=0&d=1
MaszynyBasic30b37.zip
Pobierz
SAT 3.0 Basic 23.03.2010 1228 KB wersja 1 23-03-2010 21:26 Tomasz Jakubiec
Kontakt
email: tjakobiec|ZamienNaMałpę|gmail|ZamieńNaKropkę|com
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron