POLITECHNIKA ŚLĄSKA
WYDZIAŁ ELEKTRYCZNY
KATEDRA MECHATRONIKI
Instrukcja do ćwiczenia laboratoryjnego
Przedmiot:
Mechatronika
Symbol ćwiczenia:
M3
Tytuł ćwiczenia:
Sterowanie czasooptymalne silnikiem VCM
przy pomocy karty dSpace
SPIS TREŚCI
1.
Cele ćwiczenia
2
2.
Wyposażenie stanowiska
3
3.
Podstawowe wiadomości
3
4.
Implementacja sterowania czasooptymalnego
3
5.
Linking z programem Control Desk
4
6.
Program ćwiczenia – wykaz zadań do realizacji
7
7.
Raport
7
8.
Pytania
7
Literatura
7

MECHATRONIKA
Sterowanie czasooptymalne silnikiem VCM…
2
1. CELE ĆWICZENIA
Celem ćwiczenia jest:
sformułowanie modelu matematycznego sterowania czasooptymalnego silnika VCM
(z ang. Voice Coil Motor) w programie Matlab/Simulink,
przygotowanie i przystosowanie napisanego programu do symulacji w czasie
rzeczywistym na karcie dSpace,
przygotowanie stanowiska do współpracy z kartą dSpace,
wykonanie badań właściwości sterowania czasooptymalnego.
2. WYPOSAŻENIE STANOWISKA
W skład stanowiska wchodzą:
komputer klasy PC z systemem operacyjnym Windows Vista, programami
Matlab/Simulink/RTI, Control Desk,
karta procesorów sygnałowych dSpace DS 1104 z kluczem sprzętowym na porcie
USB,
głowica laserowa LKG 152,
przetwornik głowicy laserowej LK GD500 (uwaga: zasilanie 24 V !!),
zasilacz regulowany napięcia stałego,
zestaw uruchomieniowy z modułem APS1701,
silnik VCM oraz ramię systemu pozycjonowania dysku twardego zamocowane na
podstawie z towrzywa sztucznego.
3. PODSTAWOWE WIADOMOŚCI
Sterowanie czasooptymalne stosowane jest w pamięciach masowych między innymi w
dyskach twardych do przemieszczanie ramienia serwomechanizmu w fazie tzw.
wyszukiwania ścieżek. Jak nazwa wskazuje, sterowanie to zapewnia największą szybkość
działania serwomechanizmu (często przy spełnieniu innych ograniczeń, przykładowo
dopuszczalnej wartości prądu sterowanego silnika) [1], [2].
4. IMPLEMENTACJA STEROWANIA CZASOOPTYMALNEGO
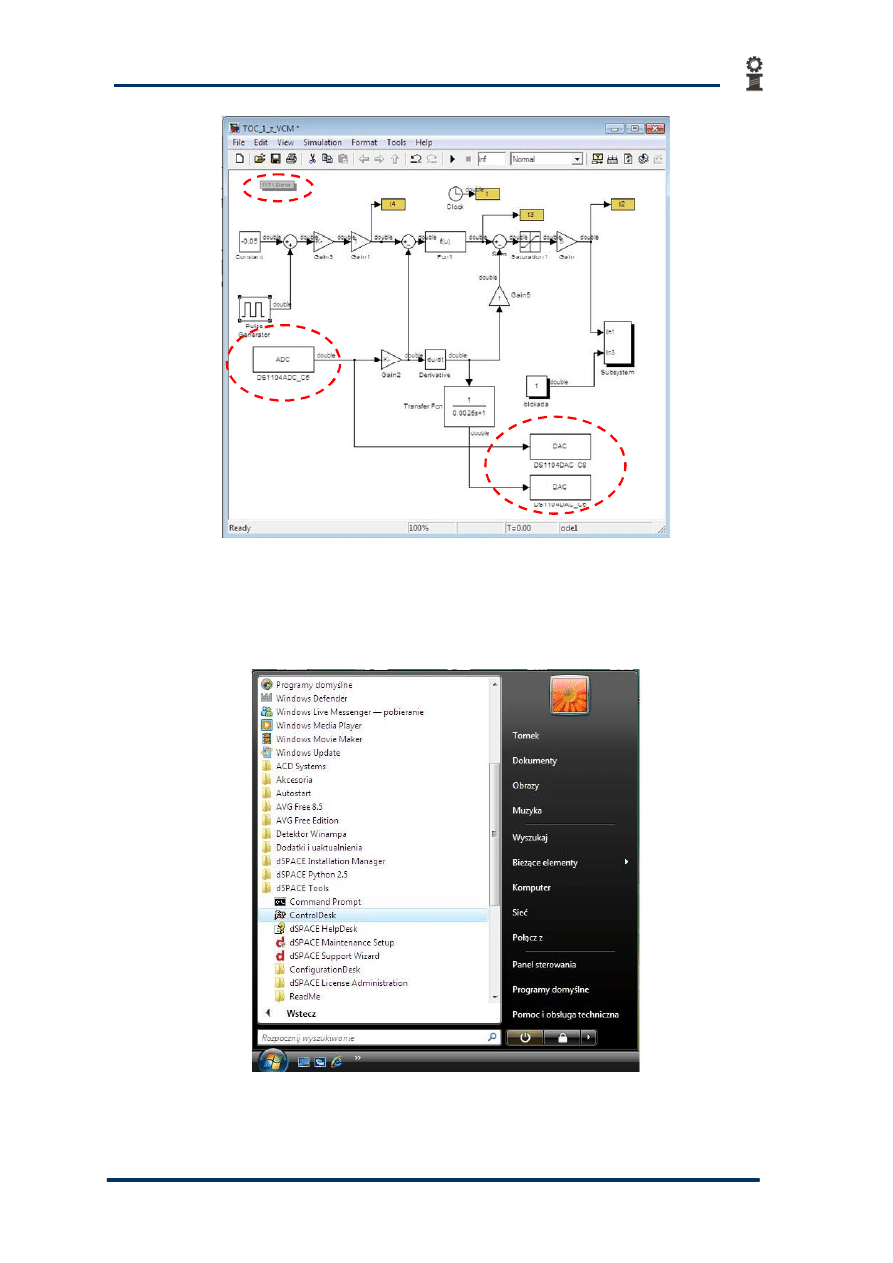
Na rys.1 przedstawiono schemat blokowy, który powinien być wykonany w
Matlabie/Simulinku. Schemat blokowy nie zawiera modelu matematycznego silnika,
rzeczywisty silnik będzie zasilany poprzez zewnętrzny przekształtnik, który to będzie
sterowany poprzez sygnały przekazywane przez blok „Subsystem” prezentowany na rys.1.
Obszary zaznaczone elipsami (linie przerywane) zawierają bloki dostępne w bibliotece RTI.
W sterowaniu tym możemy wyróżnić pętlę sprzężenia zwrotnego od pozycji kątowej silnika
VCM, realizowanej z użyciem laserowego miernika odległości, którego sygnały zmierzonej
odległości
doprowadzone
są
przez
blok
przetwornika
analogowo-cyfrowego
DS1104ADC_C5 (rys.1).
MECHATRONIKA
Sterowanie czasooptymalne silnikiem VCM…
3
Rys. 1. Schemat blokowy sterowania czasooptymalnego
5. LINKING Z PROGRAMEM CONTROL DESK
Poprzez pole Start systemu operacyjnego uruchomiamy program Control Desk, tak jak
prezentuje to rys.2.
Rys. 2. Uruchomienie programu Control Desk
MECHATRONIKA
Sterowanie czasooptymalne silnikiem VCM…
4
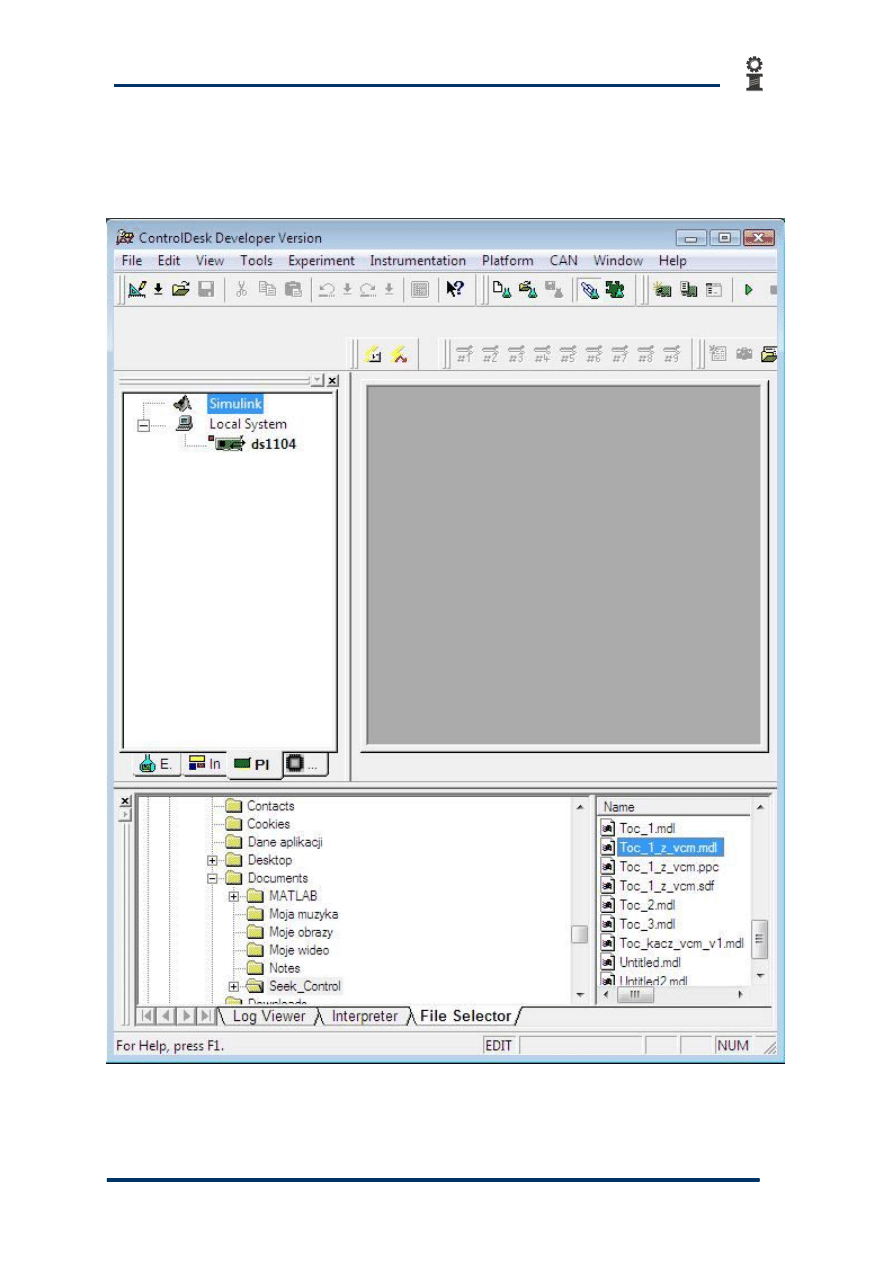
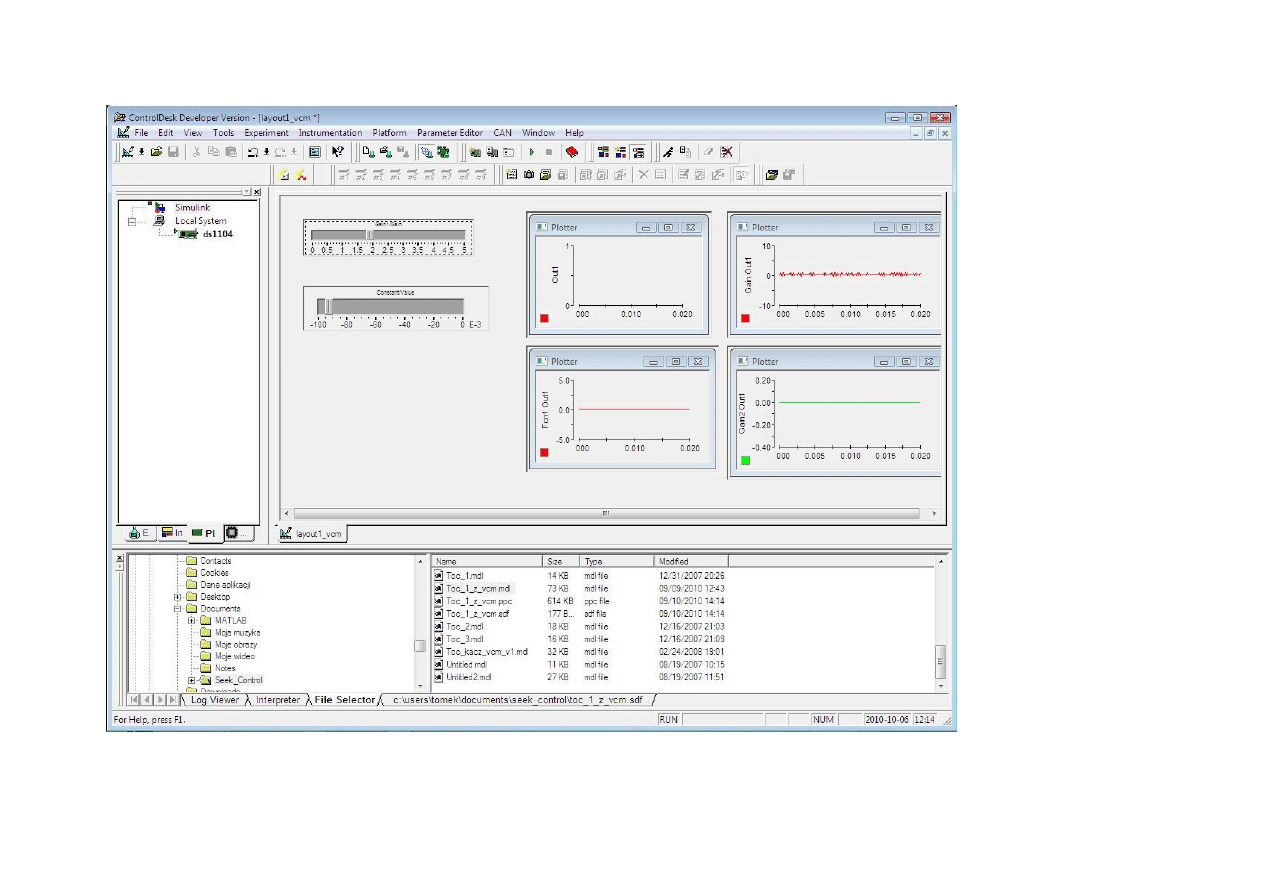
Następnie otwieramy przy pomocy karty „File Selector” wcześniej zaimplementowany model
sterowania, poprzez złapanie go myszką i przyciągnięcie do okna Simulink (znajdującego się
w górnym lewym rogu PI uruchomionej aplikacji Control Desk) – patrz rys.3.
Rys. 3. Otwieramy zaimplementowany wcześniej (w Matlabie) plik z modelem sterowania czasooptymalnego
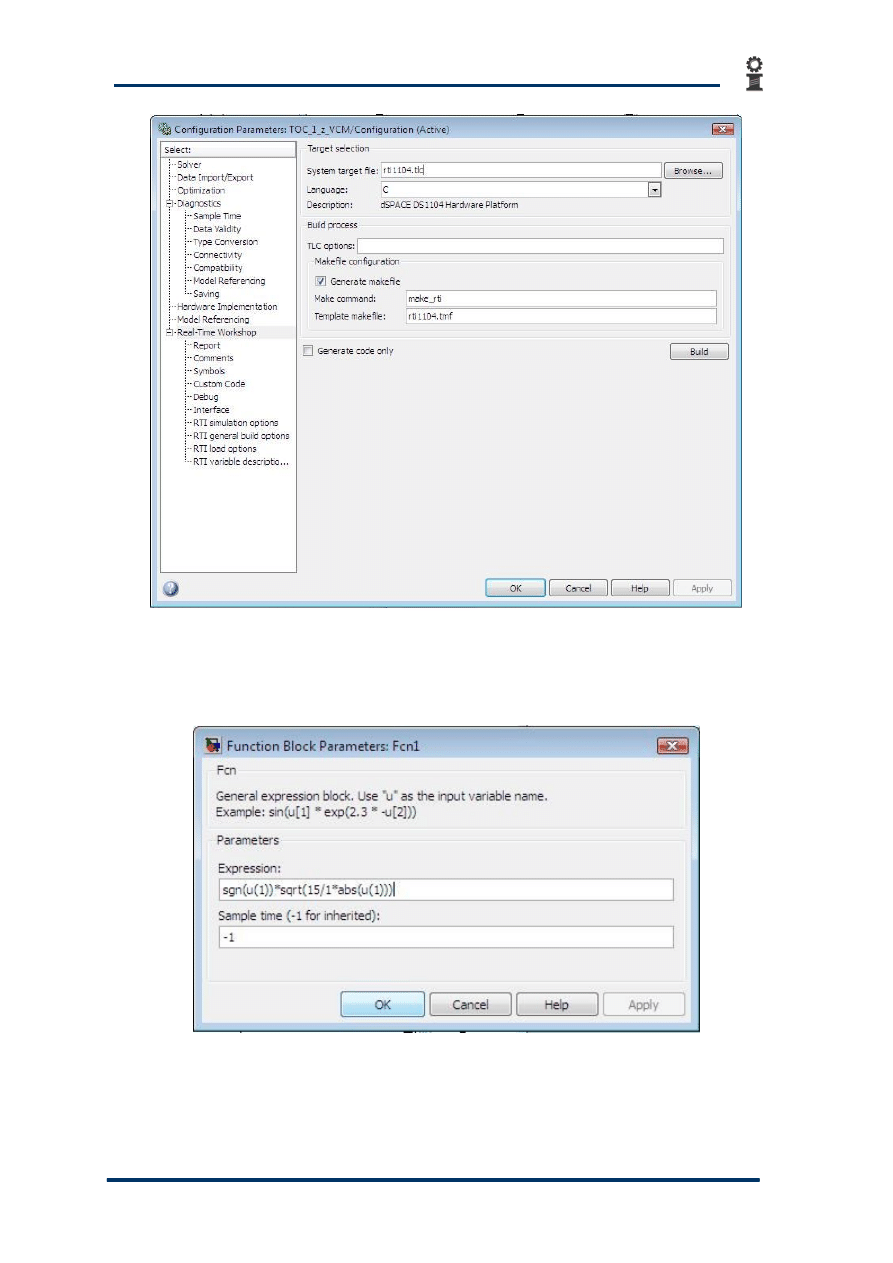
Upewniamy się czy zaimplementowany i otwarty model ma prawidłowo wpisane ustawienia
konfiguracyjne, czyli takie jak prezentuje to rys.4.
MECHATRONIKA
Sterowanie czasooptymalne silnikiem VCM…
5
Rys. 4. Dane konfiguracyjne nakładki RTI które muszą być wpisane w konfiguratorze nakładki Simulink (dla
analizowanego modelu sterowania)
Blok „Fcn1” modelu sterowania czasooptymalnego powinien zawierać funkcję wpisaną w
polu „Expression”, jak przedstawiono to na rys.5.
Rys. 5.
Aby wygodnie zmieniać wielkości zadawane (np. przemieszczenie kątowe) do napisanego
programu należy przygotować panel operatorski, który może wyglądać tak jak przedstawia to
rys.6.
Rys.6

6. PROGRAM ĆWICZENIA – WYKAZ ZADAŃ DO REALIZACJI
Implementuj model sterowania czasooptymalnego,
Uruchom model sterowania czasooptymalnego na oprogramowania Control Desk,
Skonfiguruj uruchomione programy – jeśli jest to konieczne,
Sporządź panel kontrolny dla twojego oprogramowania, umożliwiający zmianę wielkości
zadanych,
Zarejestruj, przy pomocy oscyloskopu, przebiegi przemieszczenia chwilowego ramienia
systemu pozycjonowania.
7. RAPORT
Raport z przeprowadzonego ćwiczenia laboratoryjnego powinien zawierać:
opis sposobu/ czynności podczas implementacji układu sterowania czasooptymalnego
silnikiem VCM,
schematy blokowe zrealizowanego układu sterowania, obejmujące oprogramowanie oraz
obiekty rzeczywiste,
przebiegi czasowe przemieszczeń ramienia dla kilkunastu różnych nastaw parametrów
wielkości zadanych oraz wzmocnień,
podsumowanie i wnioski.
8. PYTANIA
Na czym polega sterowanie czasooptymalne?
W jaki sposób można wprowadzić sygnały potrzebne do realizacji algorytmu sterowania
do karty dSpace?
Do czego służą bloki ADC, DAC?
Jak utworzyć Leyout i do czego on służy?
LITERATURA
[1]. V. Venkataramanan, Ben M. Chen, Tong H. Leea, Guoxiao Guo: A new approach to the
design of mode switching control in hard disk drive servo systems, Control Engineering
Practice 10, p.925–939, 2002,
[2]. G. Guo, R. Chen, T.S. Low, Y. Wang: Optimal control design for hard disk drive
servosystems, IEE Proc.-Control Theory Appl., El. 149. No. 3, p.237-242, May 2002
Opracowanie: Tomasz Trawiński
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron