„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Urszula Ran
Instalowanie urządzeń automatyki i obsługa prostych
układów automatycznej regulacji
725[01].Z3.01
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
mgr inż. Anna Tąpolska
mgr inż. Grzegorz Śmigielski
Opracowanie redakcyjne:
mgr inż. Danuta Pawełczyk
Konsultacja:
mgr inż. Gabriela Poloczek
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 725[01].Z3.01
„Instalowanie urządzeń automatyki i obsługa prostych układów automatycznej regulacji”,
zawartego w modułowym programie nauczania dla zawodu monter elektronik.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
7
3. Cele kształcenia
8
4. Materiał nauczania
9
4.1. Zasada działania układów automatycznej regulacji
9
4.1.1. Materiał nauczania
9
4.1.2. Pytania sprawdzające
11
4.1.3. Ćwiczenia
11
4.1.4. Sprawdzian postępów
13
4.2. Elementy składowe układu automatycznej regulacji i ich funkcje
14
4.2.1. Materiał nauczania
14
4.2.2. Pytania sprawdzające
16
4.2.3. Ćwiczenia
17
4.2.4. Sprawdzian postępów
18
4.3. Czujniki i przetworniki pomiarowe – budowa i zasada działania
19
4.3.1. Materiał nauczania
19
4.3.2. Pytania sprawdzające
25
4.3.3. Ćwiczenia
25
4.3.4. Sprawdzian postępów
26
4.4. Regulatory – budowa i zasada działania
27
4.4.1. Materiał nauczania
27
4.4.2. Pytania sprawdzające
32
4.4.3. Ćwiczenia
33
4.4.4. Sprawdzian postępów
36
4.5. Sterowniki PLC – budowa i zasada działania
37
4.5.1. Materiał nauczania
37
4.5.2. Pytania sprawdzające
40
4.5.3. Ćwiczenia
40
4.5.4. Sprawdzian postępów
42
4.6. Urządzenia rejestrujące – budowa i zasada działania
43
4.6.1. Materiał nauczania
43
4.6.2. Pytania sprawdzające
45
4.6.3. Ćwiczenia
46
4.6.4. Sprawdzian postępów
47
4.7. Elementy przełączające – budowa i zasada działania
48
4.7.1. Materiał nauczania
48
4.7.2. Pytania sprawdzające
50
4.7.3. Ćwiczenia
51
4.7.4. Sprawdzian postępów
52
4.8. Przetworniki elektrooptyczne – budowa i zasada działania
53
4.8.1. Materiał nauczania
53
4.8.2. Pytania sprawdzające
56
4.8.3. Ćwiczenia
56
4.8.4. Sprawdzian postępów
57

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
4.9. Układy regulacji wielkości nieelektrycznych (temperatura, ciśnienie,
przepływ) – budowa i zasada działania
58
4.9.1. Materiał nauczania
58
4.9.2. Pytania sprawdzające
62
4.9.3. Ćwiczenia
62
4.9.4. Sprawdzian postępów
66
4.10. Instalacja i obsługa urządzeń regulacji
67
4.10.1. Materiał nauczania
67
4.10.2. Pytania sprawdzające
69
4.10.3. Ćwiczenia
69
4.10.4. Sprawdzian postępów
71
4.11. Zabezpieczenia w układach automatyki
72
4.11.1. Materiał nauczania
72
4.11.2. Pytania sprawdzające
74
4.11.3. Ćwiczenia
75
4.11.4. Sprawdzian postępów
76
5. Sprawdzian osiągnięć
77
6. Literatura
82

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
1. WPROWADZENIE
Poradnik będzie Ci pomocny w przyswajaniu wiedzy z zakresu instalowania urządzeń
automatyki i obsługi prostych układów automatycznej regulacji.
W poradniku zamieszczono:
−
wymagania wstępne – wykaz umiejętności, jakie powinieneś mieć już ukształtowane,
abyś bez problemów mógł korzystać z poradnika,
−
cele kształcenia – wykaz umiejętności, jakie ukształtujesz podczas pracy z poradnikiem,
−
Materiał Nauczania – podstawowe wiadomości teoretyczne niezbędne do opanowania
treści jednostki modułowej,
−
zestaw pytań przydatny do sprawdzenia, czy już opanowałeś treści zawarte
w rozdziałach,
−
ćwiczenia, które pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
−
sprawdzian postępów,
−
sprawdzian osiągnięć – przykładowy zestaw zadań i pytań. Pozytywny wynik
sprawdzianu potwierdzi, że dobrze pracowałeś podczas zajęć i że nabyłeś wiedzę
i umiejętności z zakresu tej jednostki modułowej,
−
literaturę uzupełniającą.
Z rozdziałem Pytania sprawdzające możesz zapoznać się:
−
przed przystąpieniem do rozdziału „Materiał nauczania” – poznając wymagania
wynikające z zawodu, a po przyswojeniu wskazanych treści, odpowiadając na te pytania
sprawdzisz stan swojej gotowości do wykonywania ćwiczeń,
−
po opanowaniu rozdziału Materiał nauczania, by sprawdzić stan swojej wiedzy, która
będzie Ci potrzebna do wykonywania ćwiczeń.
Kolejny etap to wykonywanie ćwiczeń, których celem jest uzupełnienie i utrwalenie
wiadomości z zakresu badania układów mikroprocesorowych i ich montażu.
Wykonując ćwiczenia przedstawione w poradniku lub zaproponowane przez nauczyciela,
będziesz poznawał zasadę działania układów automatycznej regulacji, elementy składowe
układu regulacji i ich funkcje, budowę i zasadę działania czujników i przetworników
pomiarowych, regulatorów, sterowników PLC, urządzeń rejestrujących, elementów
przełączających, przetworników elektrooptycznych i układów regulacji wielkości
nieelektrycznych (temperatury, ciśnienia, przepływu) oraz badał i instalował wybrane
urządzenia (np. z przetwornikiem temperatury, z czujnikiem ciśnienia, optoelektroniczne,
regulator temperatury, sterownik PLC, regulator PID), układ regulatora przepływu, a także
poznawał zasady instalowania i obsługi urządzeń automatyki oraz badał zabezpieczenia
stosowane w układach automatyki. Po wykonaniu zaplanowanych ćwiczeń, sprawdź poziom
swoich postępów wykonując „Sprawdzian postępów”.
Odpowiedzi „Nie” wskazują luki w Twojej wiedzy, informują Cię również, jakich
zagadnień jeszcze dobrze nie poznałeś. Oznacza to także powrót do treści, które nie są
dostatecznie opanowane.
Poznanie przez Ciebie wszystkich lub określonej części wiadomości będzie stanowiło
dla nauczyciela podstawę przeprowadzenia sprawdzianu poziomu przyswojonych
wiadomości i ukształtowanych umiejętności. W tym celu nauczyciel może posłużyć się
zadaniami testowymi.
W poradniku jest zamieszczony sprawdzian osiągnięć, który zawiera przykład takiego
testu oraz instrukcję, w której omówiono tok postępowania podczas przeprowadzania

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
sprawdzianu i przykładową kartę odpowiedzi, w której, w przeznaczonych miejscach, zakreśl
właściwe odpowiedzi spośród zaproponowanych.
Bezpieczeństwo i higiena pracy
W czasie pobytu w pracowni musisz przestrzegać regulaminów, przepisów
bezpieczeństwa i higieny pracy oraz instrukcji przeciwpożarowych, wynikających z rodzaju
wykonywanych prac. Przepisy te poznasz podczas trwania nauki.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
Schemat układu jednostek modułowych
725[01].Z3
Instalacja urządzeń elektronicznych
725[01].Z3.01
Instalowanie urządzeń automatyki
i obsługa prostych układów
automatycznej regulacji
725[01].Z3.02
Instalowanie sterowników i regulatorów
mikroprocesorowych
725[01].Z3.03
Instalowanie urządzeń elektronicznych
powszechnego użytku
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
−
dobierać przyrządy pomiarowe,
−
obsługiwać podstawowe przyrządy pomiarowe,
−
mierzyć wielkości elektryczne,
−
rozróżniać elementy i podzespoły elektroniczne na podstawie oznaczeń i wyglądu,
−
montować elementy elektroniczne,
−
uruchamiać i testować proste układy cyfrowe i analogowe,
−
objaśniać budowę i działanie podstawowych układów cyfrowych i analogowych,
−
korzystać z różnych źródeł informacji,
−
korzystać z jednostek układu SI,
−
stosować przepisy bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej i ochrony
środowiska.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
scharakteryzować elementy stosowane w układzie automatyki, takie jak: czujniki,
przetworniki, regulatory, elementy wykonawcze,
−
wyjaśnić działanie układu automatycznej regulacji,
−
rozróżnić typy regulatorów oraz określić ich zastosowanie,
−
zmontować i zainstalować prosty układ automatycznej regulacji w typowym
zastosowaniu,
−
posłużyć się normami, katalogami, dokumentacją techniczną,
−
odczytać schematy blokowe, ideowe i montażowe urządzeń automatyki,
−
sporządzić wstępny kosztorys wykonania montażu układu automatyki,
−
ocenić jakość wykonanej pracy,
−
zademonstrować poprawność wykonywanego montażu układu automatyki,
−
zorganizować stanowisko pracy zgodnie z wymaganiami ergonomii, zasadami
bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej oraz ochrony środowiska,
−
zastosować przepisy bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej
i ochrony środowiska podczas montażu urządzeń automatyki,
−
przewidzieć zagrożenia występujące podczas montażu układów automatyki.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
4. MATERIAŁ NAUCZANIA
4.1. Zasada działania układów automatycznej regulacji
4.1.1. Materiał nauczania
W urządzeniach elektronicznych bardzo często występują układy sterowania
automatycznego, które możemy podzielić na:
−
otwarte układy sterowania,
−
zamknięte układy sterowania, nazywane układami automatycznej regulacji.
Sterowanie jest to oddziaływanie na określony obiekt sterowania (urządzenie, zespół
urządzeń, w których przebiega proces technologiczny) w celu osiągnięcia żądanego
zachowania się, zgodnego z zadanym sterowaniem. Wielkości fizyczne, za pomocą których
otoczenie oddziałuje na obiekt, nazywamy wielkościami wejściowymi obiektu. Wielkości, za
pomocą których obiekt oddziałuje na otoczenie, nazywamy wielkościami wyjściowymi.
Wielkości powodujące nie zamierzone, przypadkowe oddziaływanie otoczenia na obiekt,
nazywamy wielkościami zakłócającymi.
Sygnały wyjściowe obiektu sterowania są zwane sygnałami sterowanymi, a sygnały
wejściowe to sygnały sterujące – realizujące sterowanie obiektu oraz zakłócenia – wszelkie
inne oddziaływania, utrudniające realizację zadania sterowania.
Zadanie sterowania ma zazwyczaj postać żądanego przebiegu sygnałów sterowanych
i jest wówczas zwane sygnałem zadanym.
Układ dokonujący sterowania – wytwarzający sygnały sterujące – jest zwany
urządzeniem sterującym. Sygnałem wejściowym urządzenia sterującego jest informacja
o zadaniu sterowania. Urządzenie sterujące i obiekt stanowią układ sterowania, który może
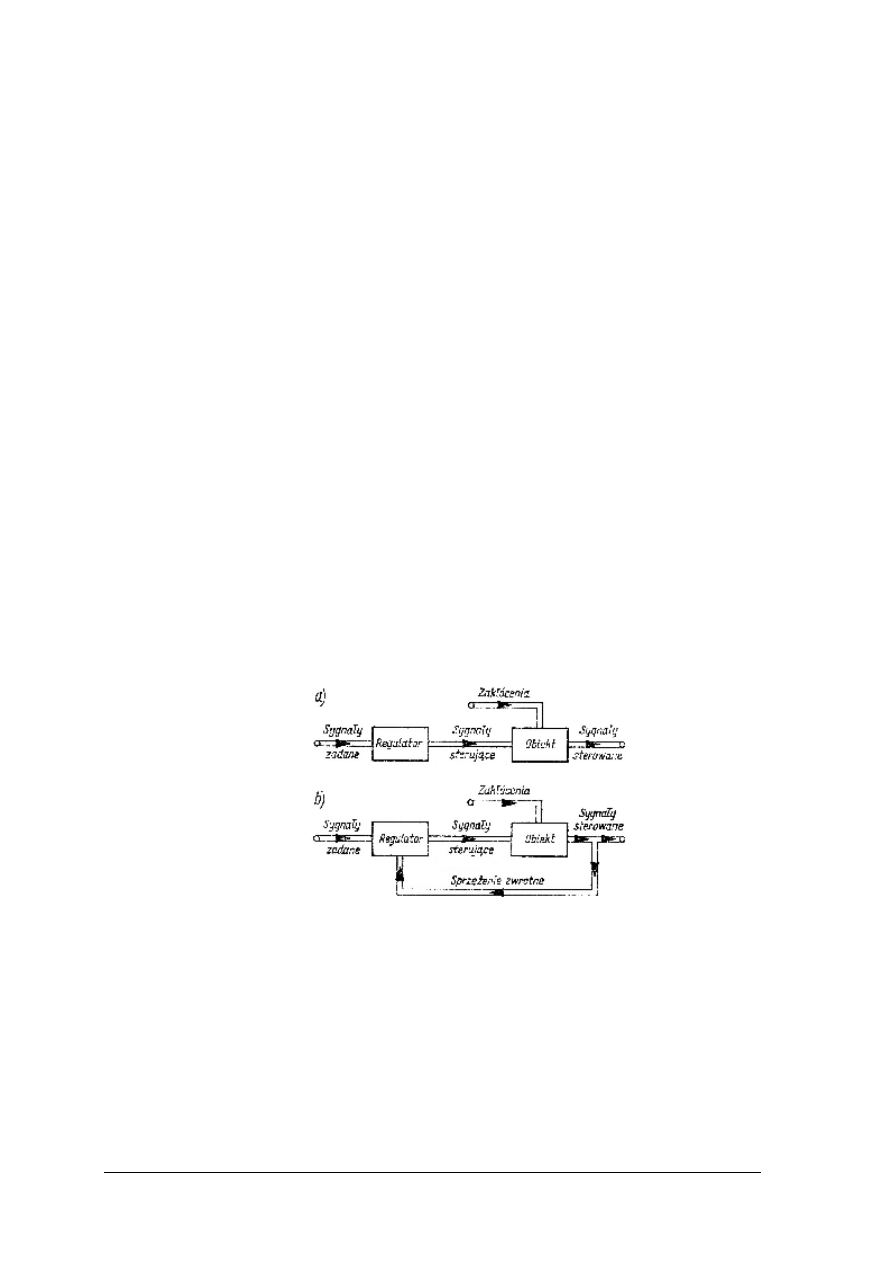
być otwarty lub zamknięty (rys. 1).
Rys. 1.
Układy sterowania: a) otwarty, b) zamknięty [2, s. 75]
W otwartym układzie sterowania urządzenie sterujące nie otrzymuje zwrotnej informacji
o aktualnej wartości sygnału sterowanego, natomiast w układzie zamkniętym, ze sprzężeniem
zwrotnym, otrzymuje ją, przy czym informacja ta wpływa na przebieg sterowania.
Układy sterowania otwartego występują we wszelkich rodzajach automatów
o działaniu cyklicznym. Do tych urządzeń należą automaty handlowe (np. sprzedaż biletów,
napojów), automaty oświetleniowe, układ zdalnego przełączania programów TV za pomocą
pilota, układ wygaszania plamki po wyłączeniu telewizora itp. W każdym z nich sygnał
wejściowy inicjujący cykl powoduje pojawienie się określonej wielkości wyjściowej
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
z obiektu, np. po wrzuceniu monety, żetonu (sygnał wejściowy) uzyskuje się puszkę napoju
(sygnał wyjściowy).
W układzie otwartym, obieg sygnału nie tworzy obwodu zamkniętego. Układy
sterowania otwartego są nieprzydatne do stabilizacji wielkości wyjściowej.
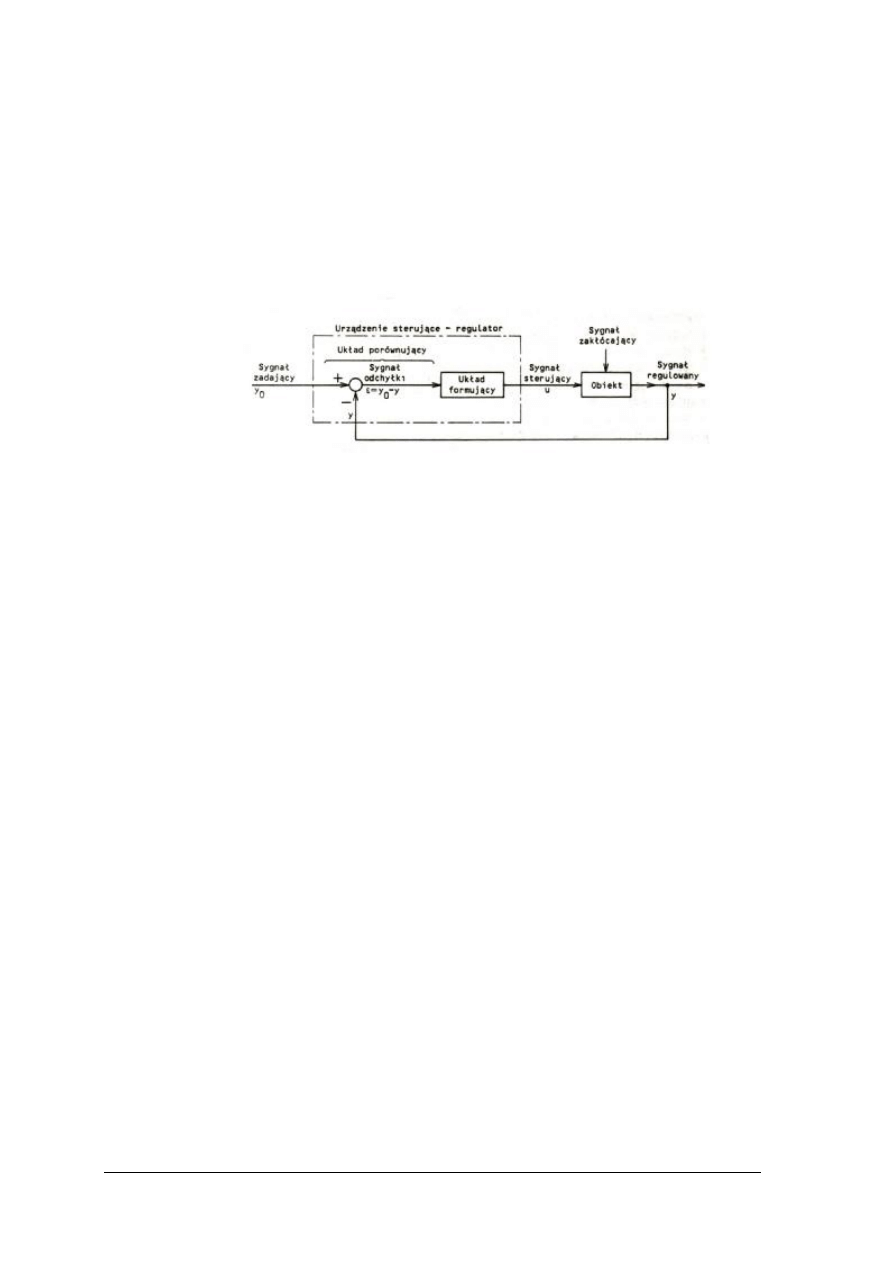
Sterowanie w układzie zamkniętym nazywa się regulacją (rys. 2). Odpowiednio zaś:
układ sterowania – układem regulacji, obiekt sterowania – obiektem regulacji, urządzenie
sterujące – urządzeniem regulującym (regulatorem), sygnał sterowany – sygnałem
regulowanym. Sygnał oddziaływania regulatora na obiekt jest dalej nazywany sygnałem
sterującym.
Rys. 2.
Schemat prostego układu regulacji automatycznej [8, s. 16]
Istotą tej struktury jest występowanie toru, po którym wielkość wyjściowa y z wyjścia
obiektu jest przesyłana na jego wejście. W układzie tworzy się zamknięty obwód
przekazywania sygnałów. Układ o tej strukturze sterowania jest układem sterowania ze
sprzężeniem zwrotnym.
W układach sterowania ze sprzężeniem zwrotnym do elementarnych zadań sterowania
należy realizacja warunku
y
0
– y = ε → 0
tzn. utrzymanie uchybu ε na poziomie bliskim zeru, co jest równoznaczne ze stabilizacją
sygnału regulowanego y na poziomie sygnału zadanego y
0
.
Układy sterowania, których celem jest spełnienie tego elementarnego warunku, należą do
układów regulacji.
W układzie regulacji sygnał regulowany jest wprowadzany do regulatora przez tzw.
ujemne sprzężenie zwrotne. Takie oddziaływanie obiektu na regulator jest charakterystyczne
dla wszystkich układów regulacji.
Podstawowym pojęciem z zakresu układów regulacji jest odchyłka (uchyb) regulacji,
oznaczająca różnicę między pożądaną (zadaną) a rzeczywistą aktualną wartością sygnału
regulowanego. Zadaniem regulatora jest takie oddziaływanie na obiekt regulacji, aby
odchyłka regulacji była bliska zera. Regulator podzielono na układ porównujący, który
wytwarza sygnał odchyłki, oraz układ formujący, który przekształca sygnał odchyłki na
sygnał sterujący. Sprzężenie zwrotne jest ujemne, co zaznaczono za pomocą znaku minus na
wejściu układu porównującego.
Przykładem układu regulacji automatycznej może być zasilacz stabilizowany, którego
zadaniem jest utrzymanie stałej wartości napięcia, bez względu na zmiany napięcia
zasilającego na wejściu zasilacza oraz zmiany obciążenia na wyjściu zasilacza.
Klasyfikacja układów regulacji
Układy regulacji można podzielić, jak wszystkie układy dynamiczne, na ciągłe
i impulsowe, liniowe i nieliniowe.
Własności regulatora są zwykle ustalone z góry i z założenia niezmienne w czasie.
W bardziej złożonych przypadkach, gdy równania obiektu, charakter zadania sterowania lub

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
zakłócenia zmieniają się w czasie pracy układu, może być pożądane dopasowanie (adaptacja)
równania regulatora. Układy regulacji o celowo zmieniających się równaniach regulatora są
zwane układami adaptacyjnymi.
Jeżeli w czasie syntezy układu regulacji dążymy do uzyskania najlepszych wskaźników
jakości, nie ograniczając struktury regulatora, to taki układ nazywamy układem optymalnym.
Jeżeli typ regulatora jest z góry zadany, a synteza zapewnia najlepsze wskaźniki jakości
jedynie wśród regulatorów danego typu, to taki układ nazywamy układem parametrycznie
optymalnym.
Ze względu na realizowane zadania sterowania układy dzielimy na:
−
układy sterowania stałowartościowego, w których sygnał zadany przybiera stałą wartość,
−
układy sterowania programowego, w których sygnał zadany jest znanym z góry
programem,
−
układy sterowania nadążnego, w których sygnał zadany ma charakter nieprzewidziany,
przypadkowy, a sterowanie ma na celu uzyskanie przebiegu procesu zgodnie
z podawanym na bieżąco sygnałem sterującym,
−
układy sterowania ekstremalnego (bez jawnie występującego sygnału zadanego), gdzie
zadaniem jest utrzymanie jednego z sygnałów wyjściowych obiektu na wartości
maksymalnej lub minimalnej,
−
układy sterowania sekwencyjnego, w których algorytm działania jest wcześniej
określony, składający się z ciągu prostych zadań realizowanych kolejno, przy czym
przejście do następnego z tych zadań zależy od realizacji poprzednich zadań albo od
spełnienia innych warunków.
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaka jest różnica między sterowaniem a regulacją?
2. Jaka jest zasadnicza różnica między otwartym a zamkniętym układem sterowania?
3. Z jakich elementów składa się układ sterowania?
4. Jak tworzy się odchyłkę regulacji?
5. Jakie mogą być zadania sterowania?
6. Jakie układy regulacji nazywamy adaptacyjnymi?
7. Jakie zadanie sterowania realizuje palnik do cięcia blachy wzdłuż zadanej linii, a jakie
pralka automatyczna?
4.1.3. Ćwiczenia
Ćwiczenie 1
Ze względu na realizowane zadania sklasyfikuj poniższe układy regulacji:
−
radarowe układy lotnicze,
−
zmywarka do naczyń,
−
ARW (układ automatycznej regulacji wzmocnienia) w radioodbiorniku,
−
lodówka,
−
obrabiarka dorabiająca klucze.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się materiałem teoretycznym o układach regulacji,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
2) przeprowadzić analizę działania wymienionych urządzeń,
3) określić zadanie sterowania realizowane przez poszczególne urządzenia,
4) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
–
zeszyt,
–
przybory do pisania,
–
literatura wskazana przez nauczyciela.
Ćwiczenie 2
Rozpatrz dwa przypadki:
−
statek po zderzeniu z górą lodową ma uszkodzoną burtę, przez którą wlewa się woda, co
powoduje zatapianie statku i jeszcze intensywniejsze wlewanie się wody;
−
kierowca „dodaje gazu”, samochód przyspiesza i po chwili osiąga nową stałą prędkość.
Czy występuje w obu tych przypadkach zjawisko sprzężenia zwrotnego? Jeśli tak, to jaki
znak mają te sprzężenia?
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z materiałem teoretycznym o układach regulacji,
2) przeanalizować zachowanie się statku w chwili katastrofy,
3) określić, czy występuje zależność pomiędzy ilością wlewającej się wody a szybkością
zatapiania statku, jeżeli tak, to jaka to jest zależność,
4) przeanalizować zachowanie się samochodu po „dodaniu gazu”,
5) określić czy występuje zależność pomiędzy „dodaniem gazu” a nową prędkością
samochodu,
6) określić jaka różnica występuje pomiędzy tymi przypadkami,
7) określić rodzaj sprzężenia zwrotnego,
8) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
–
zeszyt,
–
przybory do pisania,
–
literatura wskazana przez nauczyciela.
Ćwiczenie 3
Dla żelazka z termoregulatorem określ:
−
wielkość regulowaną, wartość zadaną, sygnał sterujący i sygnał zakłócający,
−
obiekt regulacji, urządzenie pomiarowe i urządzenie regulujące.
Określ zadanie sterowania realizowane przez żelazko. Jakie skutki pociągnie za sobą
zaspawanie styków wyłącznika bimetalowego?
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się materiałem teoretycznym dotyczącym układów regulacji,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) zaobserwować sposób działania żelazka z termoregulatorem,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
4) określić zadanie sterowania realizowane przez żelazko z termoregulatorem podczas
prasowania,
5) określić sygnały zadany, sterujący, zakłócający i regulowany,
6) podać, które elementy żelazka pełnią rolę obiektu regulacji, urządzenia pomiarowego
i urządzenia wykonawczego,
7) przeanalizować skutki zaspawania styków wyłącznika bimetalowego,
8) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
−
żelazko z termoregulatorem,
−
deska do prasowania (ew. kocyk),
−
szmatka do prasowania,
–
zeszyt,
–
przybory do pisania,
–
literatura wskazana przez nauczyciela.
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1) rozpoznać i sklasyfikować układy regulacji występujące np. w Twoim
mieszkaniu?
2) określić zadanie sterowania realizowane przez ARW w radioodbiorniku?
3) narysować schemat blokowy układu regulacji?
4) wyjaśnić, dlaczego w układach regulacji występuje ujemne sprzężenie
zwrotne?
5) określić podstawowy cel układów regulacji?
6) wyjaśnić dlaczego żelazko z zaspawanymi stykami wyłącznika bimetalowego
nie jest już przykładem układu regulacji automatycznej?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
4.2.
Elementy składowe układu automatycznej regulacji i ich
funkcje
4.2.1. Materiał nauczania
Układ automatyki powstaje z połączenia elementów i urządzeń w pewien zespół
wykonujący określone zadanie. Elementami w automatyce są nazywane człony spełniające
w układzie bądź urządzeniu proste funkcje, takie jak: wzmocnienie sygnału, porównanie
sygnałów, zmiana postaci sygnału. Członem więc jest: czujnik pomiarowy, element
porównujący, zawór, silnik, wzmacniacz, człon dynamiczny, itp. Urządzeniami w automatyce
są nazywane człony spełniające funkcje bardziej złożone. Są nimi urządzenia pomiarowe,
składające się z czujników i przetworników pomiarowych, urządzenia wykonawcze,
składające się z elementów nastawczych i napędowych, urządzenia kształtujące sygnał
sterujący oraz urządzenia, dzięki którym możliwe jest nadzorowanie przebiegu procesu
technologicznego.
Klasyfikacja elementów i urządzeń automatyki
Ze względu na rodzaj energii pomocniczej (zasilającej) elementy i urządzenia możemy
podzielić na:
−
pneumatyczne,
−
hydrauliczne,
−
i elektryczne/elektroniczne.
Ze względu na funkcje spełniane w układach automatyki możemy je podzielić na:
−
pomiarowe (czujniki, przetworniki, zespoły pomiarowe),
−
wykonawcze (np. zawory, zasuwy, silniki, siłowniki, elektromagnesy, pompy, regulatory
bezpośredniego działania),
−
tzw. części centralnej (regulatory, stacyjki manipulacyjne, rejestratory, bloki
matematyczne, urządzenia cyfrowe, np. sterowniki mikroprocesorowe).
Klasyfikując elementy i urządzenia według sposobu działania dzielimy je na analogowe
oraz cyfrowe.
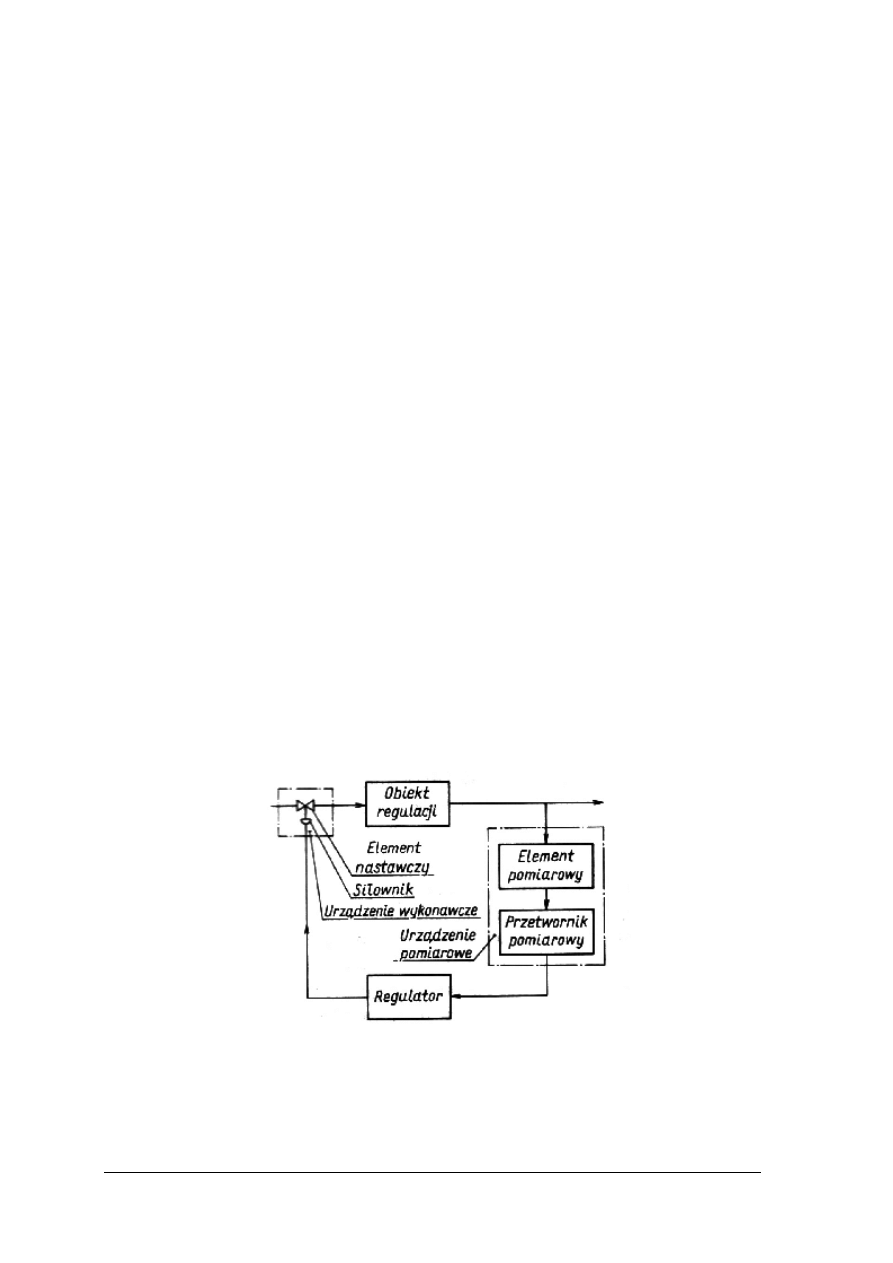
Rys. 3. Schemat blokowy układu regulacji [7, s. 14]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
Na schemacie blokowym (rys. 3) widać, że do zestawienia układu regulacji potrzebne jest
urządzenie pomiarowe, urządzenie wykonawcze oraz regulator.
Zadaniem urządzenia pomiarowego jest pomiar wielkości regulowanej. Sygnał
wyjściowy z tego urządzenia jest dla układu regulacji źródłem informacji o aktualnej wartości
wielkości regulowanej. W urządzeniu pomiarowym możemy wyróżnić element pomiarowy
oraz przetwornik pomiarowy. Zadaniem czujnika jest bezpośredni pomiar wielkości
regulowanej, natomiast przetwornik przekształca zmierzoną wielkość na inną postać, którą
można podać na regulator.
Głównym urządzeniem układu regulacji jest regulator. Zadaniem regulatora jest
utrzymywanie wartości wielkości regulowanej maksymalnie zbliżonej do wartości zadanej,
zapewniającej najkorzystniejszy przebieg procesu technologicznego. Często w skład
regulatora wchodzi zadajnik wartości zadanej. Regulator porównuje obie wartości: zadaną
i rzeczywistą regulowaną. W wyniku tego porównania wytwarza się sygnał sterujący, którego
zadaniem jest takie zadziałanie na obiekt, aby różnicę pomiędzy wartością rzeczywistą
a wartością zadaną sprowadzić do zera.
Regulator oddziałuje na obiekt za pośrednictwem urządzenia wykonawczego,
składającego się, w tym przypadku, z elementu nastawczego (zaworu) sterującego wartością
sterującą i siłownika zapewniającego uzyskanie odpowiedniej siły do przestawienia elementu
nastawczego.
Zadaniem urządzeń wykonawczych w układzie regulacji jest takie oddziaływanie na
strumienie energii lub materiałów, aby został zrealizowany zamierzony przebieg procesu.
W odpowiedzi na sygnał wyjściowy z regulatora zmieniają one wartość wielkości
nastawiającej. W skład urządzeń wykonawczych wchodzą:
−
element nastawczy,
−
element napędowy,
−
wzmacniacz mocy.
To właśnie element nastawczy wpływa bezpośrednio na wejściowy strumień
materiałowo-energetyczny. Elementami nastawczymi w układach regulacji procesów
przemysłowych są: zawory, zasuwy, przepustnice, żaluzje, dozowniki, pompy o zmiennym
wydatku, dławiki, dzielnika napięcia, transformatory z odczepami, itp.
Elementy napędowe dostarczają energii mechanicznej, która jest niezbędna do
przestawienia elementu nastawczego według sygnału podanego z regulatora. Jako elementy
napędowe w układach regulacji są stosowane siłowniki, silniki, pompy, elektromagnesy,
zespoły napędowe, itp.
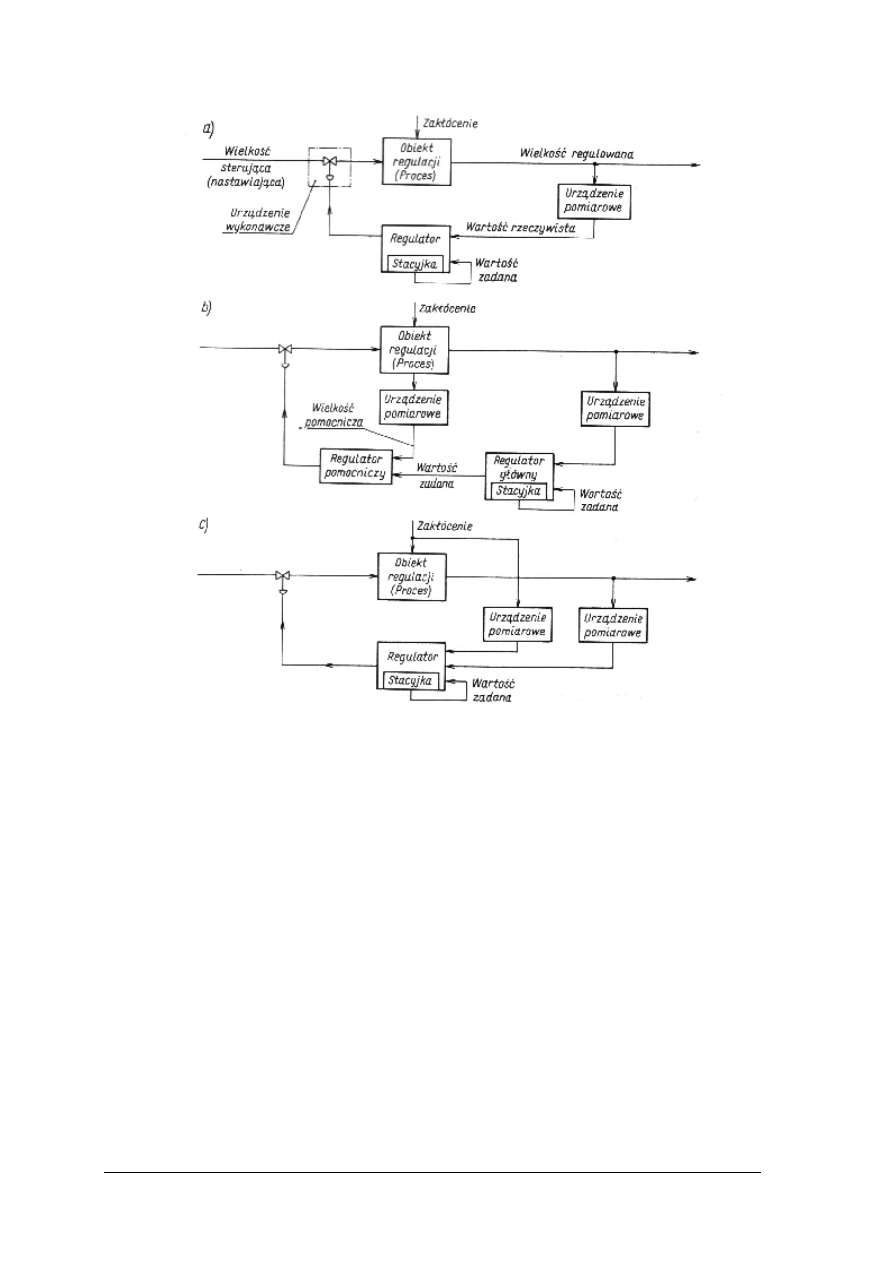
Rodzaje układów regulacji
Do najczęściej spotykanych układów regulacji należą jednoobwodowe układy stabilizacji
automatycznej (regulacji stałowartościowej – rys. 4 a), w których wartość zadana w trakcie
normalnej pracy układu nie ulega zmianom. Coraz częściej stosowane są też układy
z pomiarem zakłóceń (rys. 4 c) oraz układ regulacji kaskadowej (rys. 4 b). W tym ostatnim
układzie są dwa regulatory: regulator główny i regulator pomocniczy. Zadaniem regulatora
głównego jest utrzymanie na zadanym poziomie wielkość regulowaną. Regulator pomocniczy
natomiast ma utrzymywać taką wartość pewnej wielkości pomocniczej, jaka wynika z zadania
realizowanego przez regulator główny. Regulator główny wytwarza wartość zadaną dla
regulatora pomocniczego. Układ regulacji kaskadowej umożliwia więc eliminację wpływu
zakłócenia działającego na wejściu obiektu, nie poprzez bezpośredni pomiar zakłócenia ale
poprzez pomiar pomocniczej wielkości wyjściowej, na zmiany której największy wpływ ma
to zakłócenie.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Rys. 4.
Schemat blokowy układu regulacji: a) jednoobwodowego, b) kaskadowego, c)
z pomiarem zakłóceń [7, s. 12]
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Co nazywamy elementami, a co urządzeniami w układach automatyki?
2. Jak klasyfikujemy elementy i urządzenia automatyki?
3. Jaką rolę pełni w układzie regulacji urządzenie pomiarowe?
4. Jakie zadania pełni w układzie regulacji regulator?
5. Jakie zadania pełni w układzie regulacji urządzenie wykonawcze?
6. Jakie jest zadanie regulatora głównego, a jakie regulatora pomocniczego w układzie
regulacji kaskadowej?
7. Czym różni się czujnik od przetwornika pomiarowego?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
4.2.3. Ćwiczenia
Ćwiczenie 1
Wybierz, korzystając z katalogu czujniki, które można zastosować w układzie sterowania
bramą garażową. Sterowanie odbywa się za pośrednictwem pilota: brama może otworzyć się
do połowy lub na całą szerokość.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować opisaną sytuację,
2) dobrać rodzaje czujników,
3) zaproponować ilość i miejsce instalacji czujników,
4) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
–
katalogi elementów automatyki,
–
zeszyt,
–
przybory do pisania,
–
literatura wskazana przez nauczyciela.
Ćwiczenie 2
Podaj trzy przykłady układów regulacji stosowanych w znanych Ci urządzeniach
elektrycznych i elektronicznych. Określ, jaki rodzaj regulacji automatycznej został wykorzystany.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować treść zadania,
2) zapoznać się z przygotowaną dokumentacją techniczną wybranych urządzeń
elektrycznych i elektronicznych,
3) narysować
blokowe
schematy
poglądowe
układów
regulacji
zastosowanych
w analizowanych urządzeniach,
4) wyodrębnić elementy układów regulacji,
5) określić rodzaj regulacji,
6) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
–
dokumentacja techniczna wybranych urządzeń elektrycznych i elektronicznych,
–
zeszyt,
–
przybory do pisania,
–
literatura wskazana przez nauczyciela.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
Ćwiczenie 3
Rozpoznaj termometry. Zaklasyfikuj do odpowiedniej grupy ze względu na sposób
pomiaru temperatury, podaj ich producenta, dane techniczne oraz rodzaj sygnału
wyjściowego.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przygotować stanowisko do pracy,
2) rozpoznać przyrządy do pomiaru temperatury,
3) znaleźć karty katalogowe termometrów lub odpowiednie normy,
4) określić sposób pomiaru temperatury: stykowy czy bezstykowy,
5) określić zasadę działania czujnika,
6) określić ich właściwości pomiarowe: zakres, działka elementarna, klasa dokładności,
7) określić rodzaj sygnału wyjściowego z czujnika,
8) określić zakres zastosowania czujnika,
9) zaprezentować wykonane ćwiczenie,
Wyposażenie stanowiska pracy:
–
termometry: szklane cieczowe, bimetalowy, manometryczny, czujniki rezystancyjne,
termoelementy, termistory, pirometr,
–
karty katalogowe,
–
normy,
–
kartki papieru,
–
przybory do pisania,
–
literatura wskazana przez nauczyciela.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
narysować schemat blokowy układu regulacji kaskadowej?
2)
określić rodzaj regulacji wykorzystywany w urządzeniu?
3)
określić człony składowe urządzenia sterującego?
4)
narysować blokowy schemat układu regulacji na podstawie
dokumentacji technicznej urządzenia?
5)
dobrać czujniki do realizacji określonego zadania sterowania?
6)
korzystać z katalogów elementów automatyki?
7)
określić, który element układu regulacji jest regulatorem, a który
obiektem?
8)
dobrać na podstawie kart katalogowych rodzaj termometru do pracy
w określonym układzie?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
4.3. Czujniki i przetworniki pomiarowe – budowa i zasada
działania
4.3.1. Materiał nauczania
Urządzenia pomiarowe w układach automatyki powinny charakteryzować szczególną
niezawodnością oraz dokładnością działania. Wynika to z faktu, że w układach regulacji
urządzenia pomiarowe nie są objęte sprzężeniem zwrotnym i ich błędy nie są eliminowane
przez działanie sprzężenia zwrotnego ale w całości przenoszą się na dokładność regulacji.
Zadaniem urządzeń i układów pomiarowych w układach sterowania jest:
−
dostarczanie informacji o bieżącej wartości kontrolowanych parametrów,
−
rejestrowanie wyników pomiarów,
−
wytwarzanie sygnału dla regulatora,
−
opracowanie wyników pomiarów,
−
sygnalizowanie nadmiernych odchyłek od pożądanej wartości określonych wielkości.
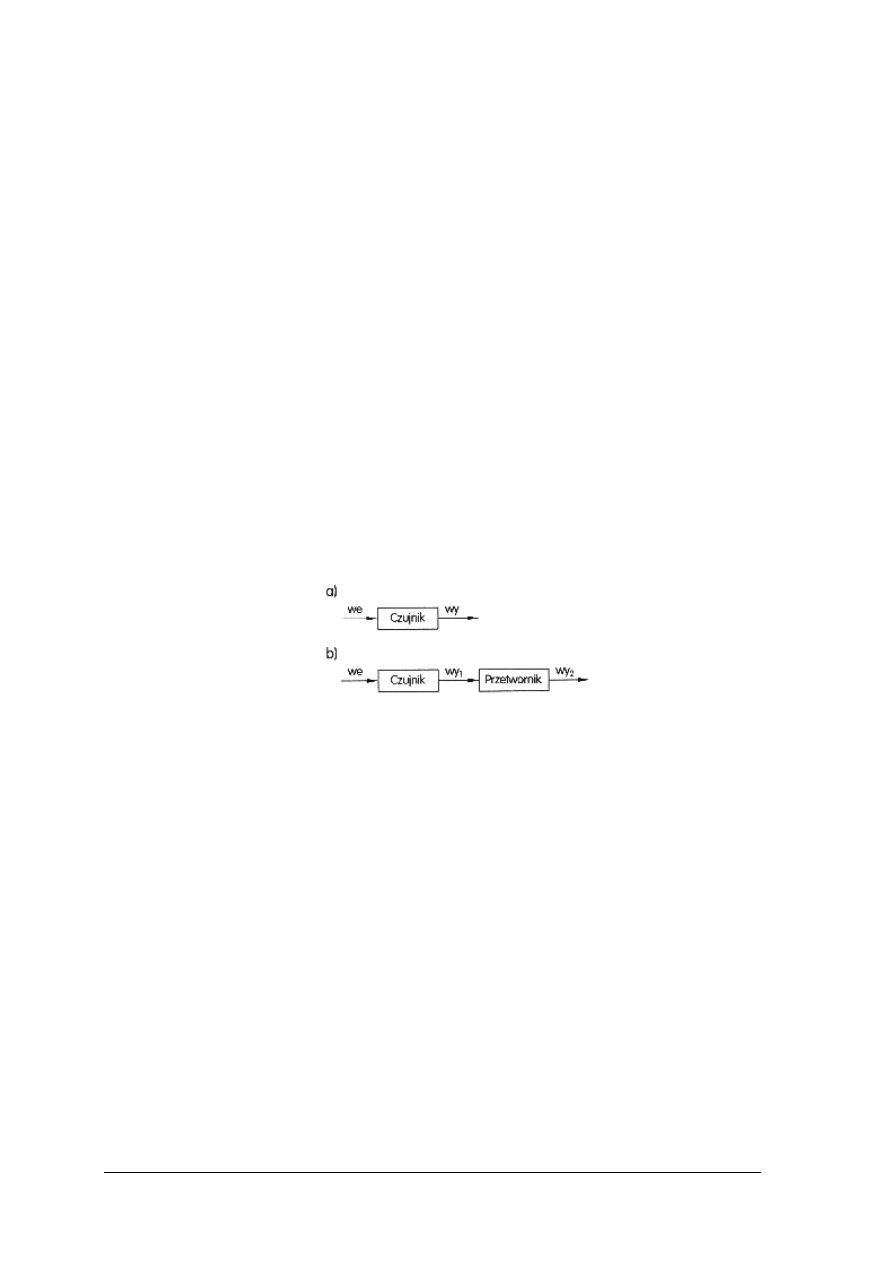
Czujnik jest to element układu pomiarowego, na który bezpośrednio oddziałuje wielkość
mierzona. Sygnał wyjściowy czujnika jest funkcją zmian mierzonej wielkości fizycznej.
Przetwornik przekształca sygnał wyjściowy czujnika na standardowy sygnał elektryczny lub
pneumatyczny, aby umożliwić łączenie układów pomiarowych z innymi urządzeniami
wchodzącymi w skład układów regulacji.
Rys. 5.
Budowa układu pomiarowego, gdy wielkość wyjściowa czujnika: a) nadaje
się do bezpośredniego wykorzystania: b) nie nadaje się do bezpośredniego
wykorzystania i wymaga przetworzenia [8, s. 195]
Dla aparatury produkowanej w Polsce przyjęto następujące sygnały standardowe:
−
elektryczny 0–5 mA, 0–20 mA lub 4–20 mA,
−
pneumatyczny 20–100 kP.
Porównując czujniki należy uwzględniać następujące cechy:
−
zakres, czyli dopuszczalny przedział zmian sygnału wyjściowego ze względu na budowę
i zasadę działania czujnika,
−
jednoznaczność
charakterystyki
przetwarzania,
czyli
nieliniowość
(największe
odchylenie od teoretycznej
linii prostej) oraz niejednoznaczność (histereza
charakterystyki statycznej) muszą mieścić się w dopuszczalnych granicach,
−
czułość, która ma istotny wpływ na dokładne przetwarzanie i przesyłanie informacji,
−
odporność na zakłócenia,
−
stałość charakterystyki w czasie,
−
mała bezwładność, szczególnie istotna przy pomiarach szybkozmiennych,
−
duża niezawodność,
−
niska cena.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
Przetworniki pomiarowe podlegają takim samym wymaganiom jak inne elementy
urządzeń pomiarowych, szczególnie jeśli chodzi o klasę dokładności. Są budowane jako
układy bez sprzężenia zwrotnego lub jako autokompensacyjne układy ze sprzężeniem
zwrotnym. Klasa dokładności przetwornika autokompensacyjnego jest zdecydowanie wyższa
i dlatego dąży się do obejmowania nim jak największej części urządzenia pomiarowego.
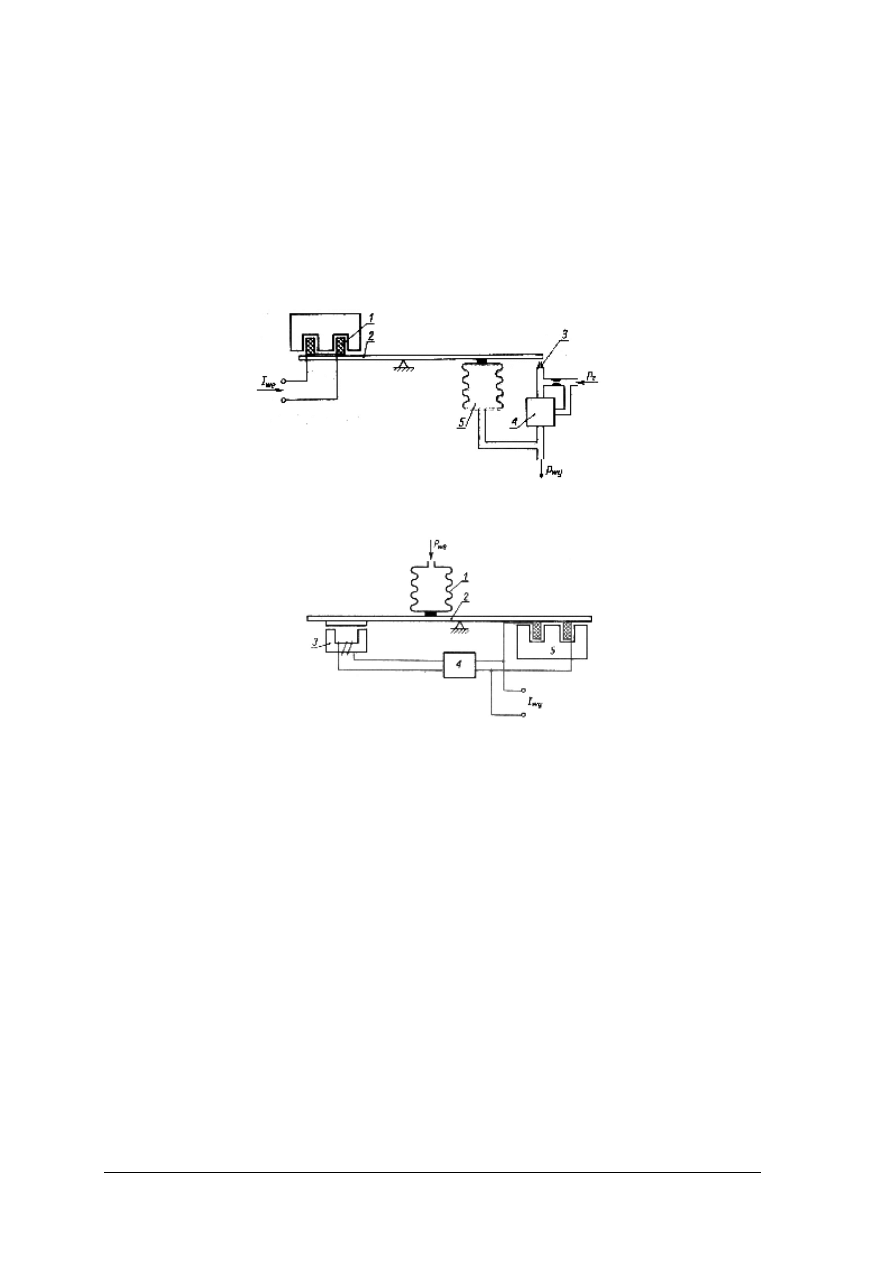
Ważnymi elementami urządzeń pomiarowych są autokompensacyjne przetworniki:
elektropneumatyczny (rys. 6) i pneumatyczno – elektryczny (rys. 7). Przetworniki te działają
na zasadzie równoważenia sił. W pierwszym przypadku elementem kompensującym jest
mieszek, w drugim – elektromagnes.
Rys. 6.
Schemat budowy przetwornika elektropneumatycznego: 1 – cewka, 2 – dźwignia,
3 – zespół dysza–przysłona, 4 – wzmacniacz pneumatyczny, 5 – mieszek [7, s. 45]
Rys. 7.
Schemat budowy przetwornika pneumatyczno–elektrycznego: 1 – mieszek, 2 – dźwignia,
3 – czujnik indukcyjnościowy przesunięcia, 4 – wzmacniacz, 5 – elektromagnes [7, s. 46]
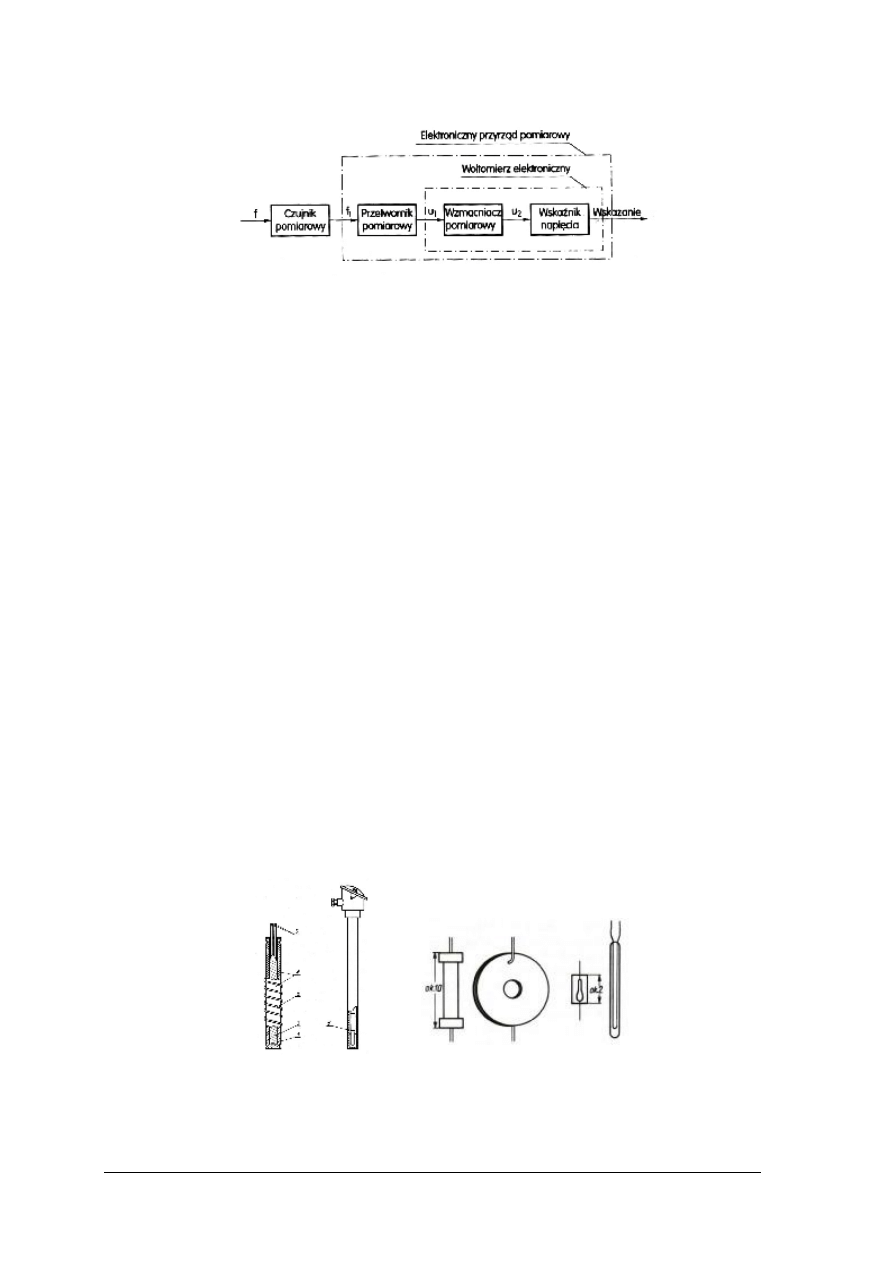
Elektroniczne przyrządy pomiarowe
Przyrządy pomiarowe zawierające elektroniczne elementy wzmacniające nazywamy
elektronicznymi (rys. 8). W porównaniu z przyrządami elektrycznymi posiadają większą
czułość oraz większe pasmo mierzonych częstotliwości. Dzielimy je na:
−
elektroniczne przyrządy pomiarowe analogowe, w których wynik pomiaru możemy
odczytywać na tarczy podziałkowej przyrządu ze wskazówką albo na ekranie lampy
oscyloskopowej,
−
elektroniczne przyrządy pomiarowe cyfrowe, w których wynik pomiaru wyświetlany jest
w postaci liczby na wyświetlaczu cyfrowym lub graficznym albo na ekranie oscyloskopu
cyfrowego, ekranie monitora sterowanego przez komputer przyrządu.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
Rys. 8.
Schemat
funkcjonalny
elektronicznego
analogowego
przyrządu
pomiarowego:
f – parametr mierzony w postaci ukrytej, np. temperatura, f
1
– parametr mierzony
przetworzony przez czujnik pomiarowy na postać jawną, u
1
, u
2
– napięcia odpowiadające
f
1
[8, s. 8]
Elektroniczne przyrządy pomiarowe analogowe są obecnie wypierane przez ich cyfrowe
odpowiedniki. Analogowe przyrządy pomiarowe w porównaniu z cyfrowymi, mają prostszą
budowę oraz są tanie. Elementem końcowym analogowych elektronicznych przyrządów
pomiarowych jest: elektryczny miernik wychyłowy, linijka diodowa lub lampa oscyloskopowa.
Wskaźniki analogowych przyrządów są wyskalowane w wartościach mierzonego parametru.
Czujnik pomiarowy jest elementem oddzielnym nie wchodzącym w skład przyrządu
pomiarowego, np. czujnik temperatury wmontowany w obiekt mierzony.
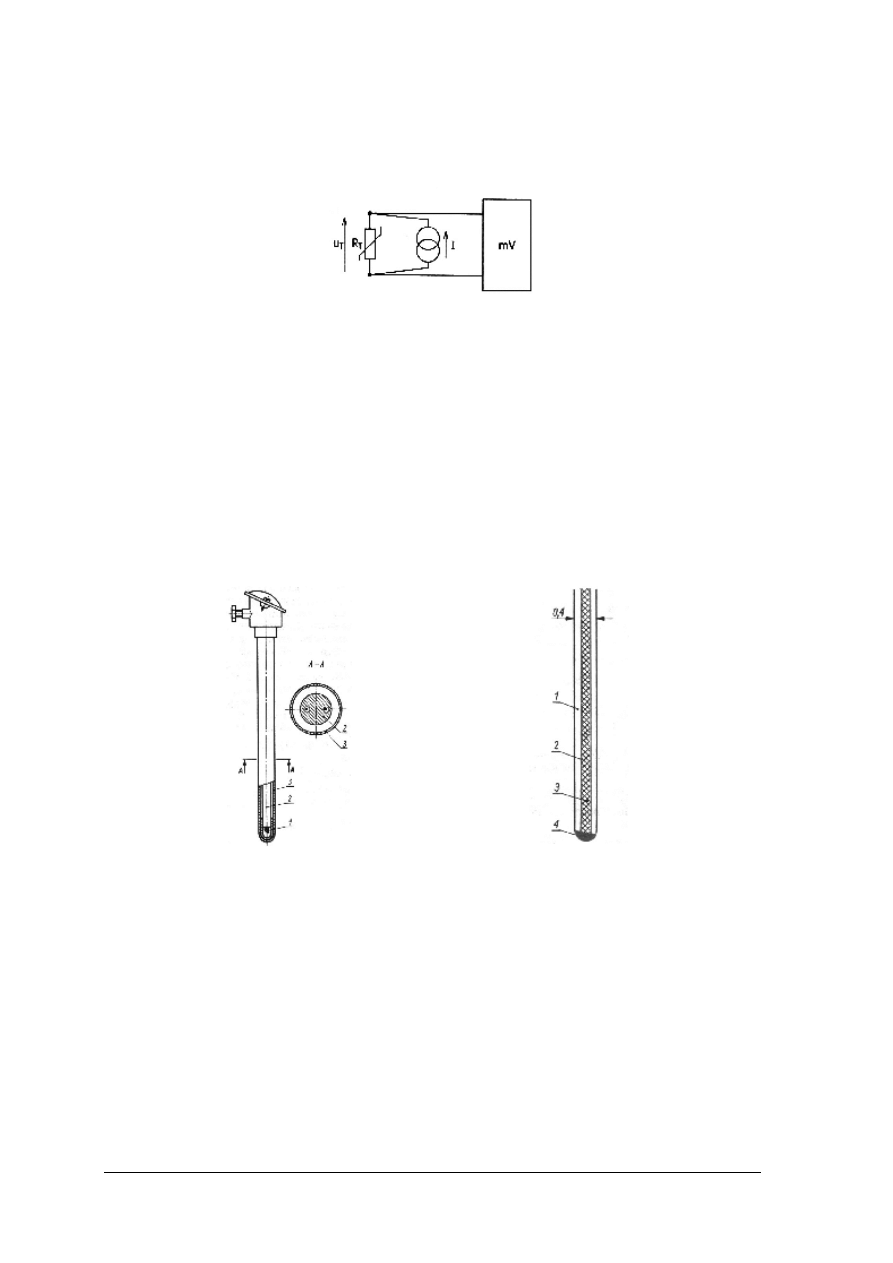
Pomiar temperatury za pomocą termometru elektronicznego
Termometr elektroniczny składa się z czujnika temperatury (np. termopary, termorezystora,
termistora), przetwornika pomiarowego i wskaźnika. W zależności od zakresu mierzonej
temperatury stosuje się odpowiednie czujniki, które z kolei decydują o rodzaju układu
pomiarowego.
W czujnikach oporowych (rezystancyjnych) zasada ich działania wykorzystuje zależności
rezystancji niektórych metali i półprzewodników od temperatury.
W czujnikach oporowych metalicznych (rys. 9) stosuje się najczęściej platynę, nikiel oraz
miedź. Metale te charakteryzują się stałością charakterystyki rezystancji w funkcji
temperatury, dużym współczynnikiem temperaturowym oraz odpornością na wpływ
czynników zewnętrznych.
Czujniki termistorowe (rys. 9) są wykonane z tlenków metali (żelaza, manganu, litu
i tytanu) w postaci niewielkich elementów (płytek, prętów i kulek) z metalowymi
wyprowadzeniami.
Charakteryzują
się
one
dużym
ujemnym
współczynnikiem
temperaturowym, a ich charakterystyka temperaturowa rezystancji jest nieliniowa. Największą
ich zaletą jest duża czułość.
a)
b)
c)
Rys. 9.
Budowa termometru: a) rezystancyjnego metalicznego; b) termistorów masywnych
niehermetyzowanych; c) termistorów perełkowych zatapianych w szkle; 1 – listwa
izolacyjna, 2 – drut oporowy, 3 – przewody wyprowadzające, 4 – przekładki mikowe,
5 – taśma metalowa, 6 – osłona ceramiczna [7, s. 115 i 116]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
Zasadę działania termometrów elektronicznych z czujnikami rezystancyjnymi
przedstawia rys. 10. Przetwornik pomiarowy przetwarza zmiany rezystancji czujnika,
zasilanego stabilizowanym prądem I, w zmiany napięcia u
T
. Napięcie czujnika u
T
= I ∙ R
T
.
Rys. 10. Termometr elektroniczny termorezystancyjny [8, s. 18]
W czujnikach termoelektrycznych (termoparach) wykorzystuje się zjawisko powstawania
siły termoelektrycznej wywołane zmianą temperatury. Termoelementy (termopary) wykonuje
się przez spawanie lub lutowanie na jednym końcu dwóch przewodów A i B z różnych metali.
W obwodzie zamkniętym z termoelementem, w którym połączone końce mają różną
temperaturę powstaje siła termoelektryczna
W nazwach termoelementów na pierwszym miejscu podawana jest elektroda dodatnia.
Najczęściej stosowane termoelementy to: platynorod – platyna (PtRh–Pt); nikielchrom – nikiel
(NiCr–Ni); żelazo – konstantan (Fe–konstantan); miedź – konstantan (Cu–konstantan).
Konstrukcja termoelementów zależy od ich przeznaczenia, np. typu przemysłowego
charakteryzuje się dużą bezwładnością cieplną, a typu specjalnego do pomiarów
powierzchniowych – bardzo małą bezwładnością cieplną (rys. 11).
a)
b)
Rys. 11. Schemat budowy czujnika z termoelementem: a) o dużej bezwładności cieplnej;
b) o małej bezwładności cieplnej; 1 – spoina pomiarowa, 2 – osłona ceramiczna,
3 – rurka z metalu A, 4 – tuleja pomiarowa, 5 – głowica, 6 – pręt z metalu B,
7 – izolacja [7s. 118]
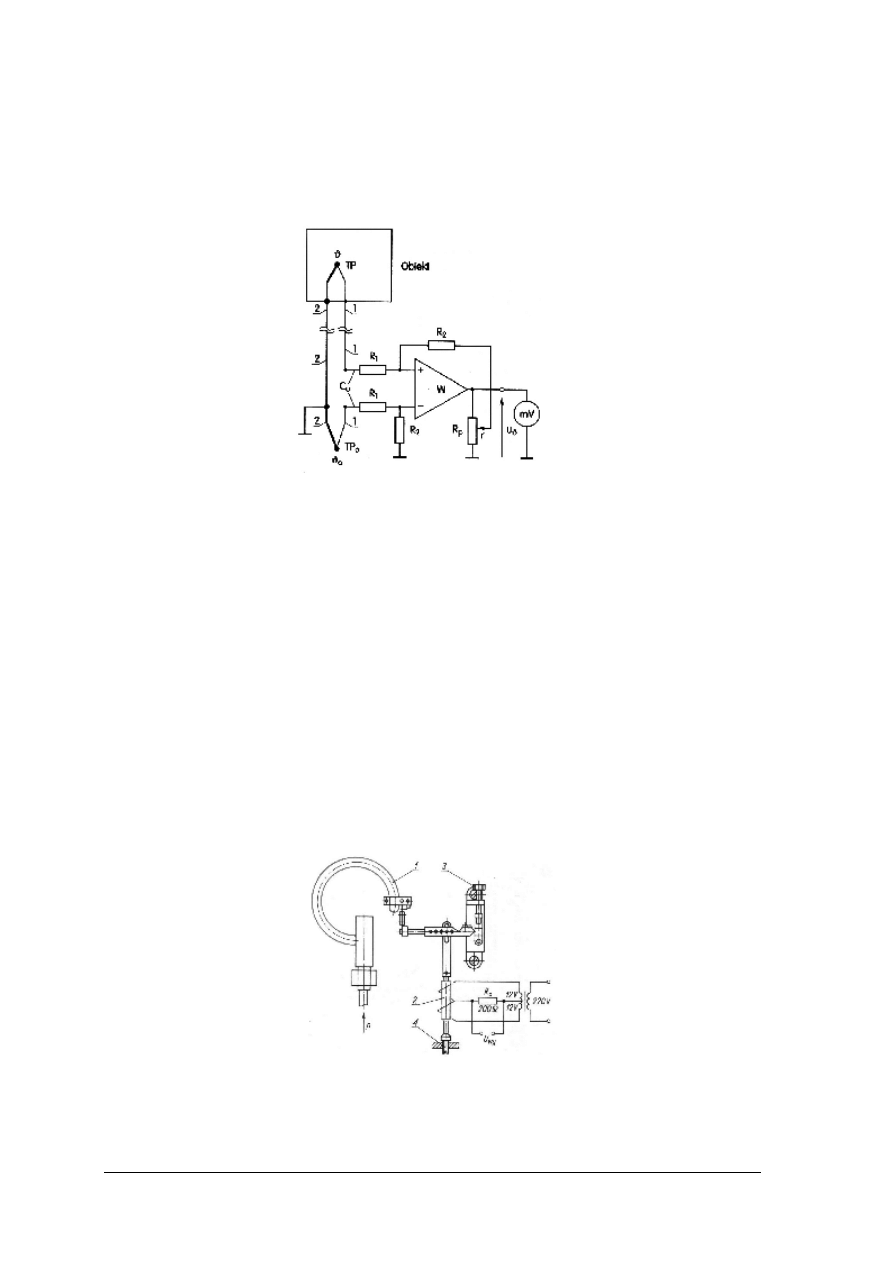
Przy pomiarach temperatury z użyciem czujników termoelektrycznych występuje
problem tzw. kompensacji temperatury zimnych końców termopary. W celu wyeliminowania
tych niedokładności stosuje się:
−
odsunięcie złącza odniesienia od miejsca pomiaru – stosuje się wówczas tzw. przewody
kompensacyjne,
−
stabilizację temperatury złącza odniesienia (termostatowanie),
−
kompensację zmian temperatury odniesienia.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
Zasadę działania elektronicznego termometry z termoparą, w którym kompensację
temperatury zimnych końców termopary uzyskuje się przez włączenie termopary odniesienia
TP
o
przedstawia rys. 12. Siła elektromotoryczna termopary odniesienia TP
o
kompensuje siłę
termoelektryczną zimnych końców termopary pomiarowej TP w zmieniającej się
temperaturze otoczenia υ
o
.
Rys. 12. Termometr elektroniczny termoelektryczny:
υ i
TP
o
– temperatura mierzona i termopara
pomiarowa,
υ
o
i TP
o
– temperatura końców termopary pomiarowej i termopara
odniesienia, 1 i 2 – metale tworzące termoparę, Cu – miedź, W – wzmacniacz operacyjny,
mV – miliwoltomierz [8, s. 18]
Zastosowany w termometrze wzmacniacz pomiarowy składa się ze wzmacniacz
operacyjnego i 5 rezystorów. Potencjometr R
p
służy do zmiany wzmocnienia wzmacniacza
pomiarowego.
Cyfrowe mierniki temperatury otrzymamy przez zastąpienie w przedstawionych układach
miliwoltomierzy analogowych miliwoltomierzami cyfrowymi.
Ciśnieniomierze elektryczne
Przetwarzanie ciśnienia na sygnał elektryczny można uzyskać wykorzystując odkształcenia
sprężystych elementów lub wykorzystując zjawiska, które związane są z powstawaniem naprężeń
w materiałach (piezoelektrycznych, ferromagnetycznych i rezystancyjnych). Wyniki pomiarów
ciśnienia za pomocą ciśnieniomierzy elektrycznych mogą być przesyłane na odległość.
Odkształcenia elementów sprężystych są mierzone za pomocą czujników przesunięcia,
najczęściej indukcyjnymi (rys.13), pojemnościowymi (rys.14) lub potencjometrycznymi (rys.15).
Rys. 13.
Manometr z rurką Bourdona i czujnikiem indukcyjnościowym do pomiaru odkształcenia
końca rurki (1 – rurka Bourdona, 2 – czujnik, 3 – zerowanie, 4 – regulacja naprężęnia
początkowego [7, s. 90]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
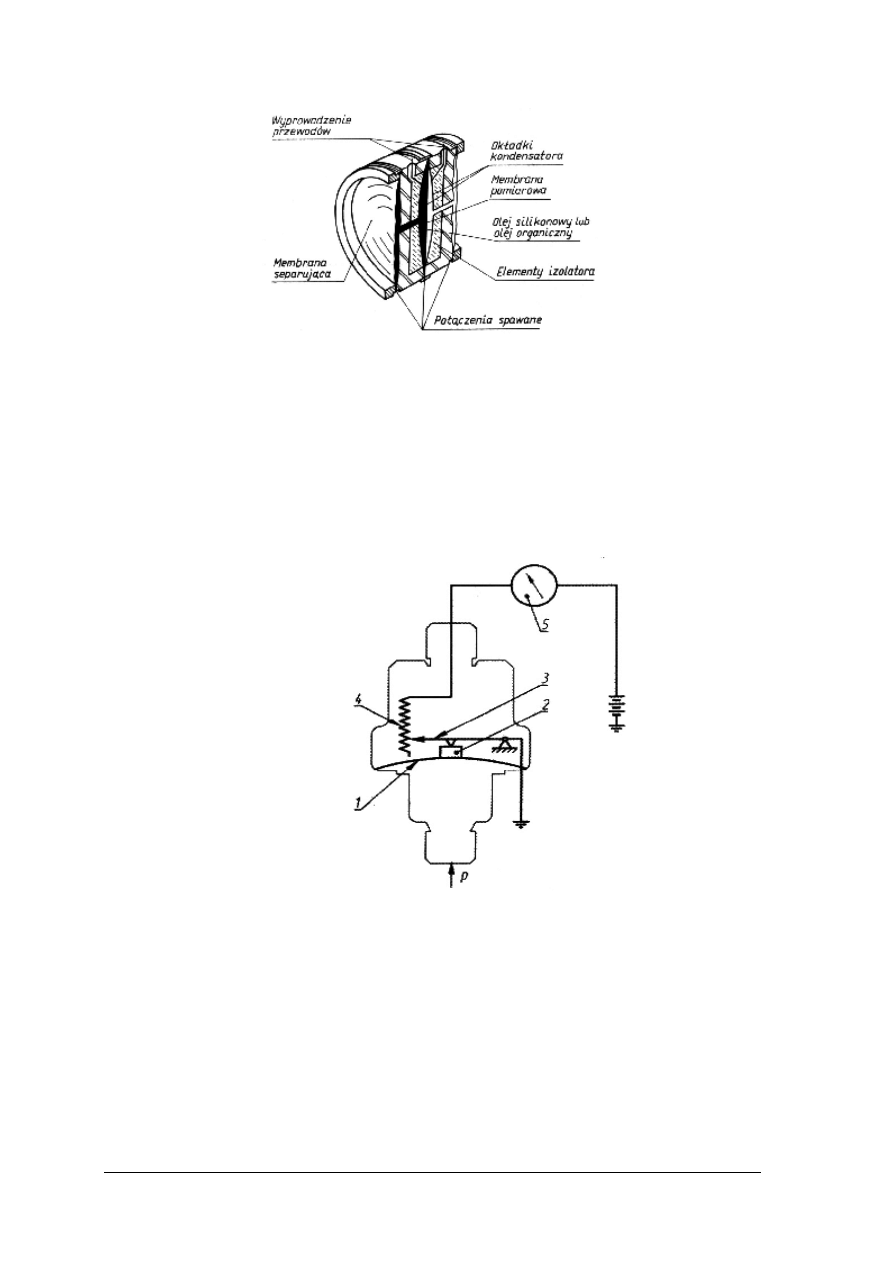
Rys. 14. Schemat budowy przetwornika różnicy ciśnień z membraną pomiarową działającą
jako kondensator produkcji MERA PNEFAL na licencji firmy ROSEMOUNT
[7, s 96]
W przetworniku (rys. 14) wykorzystano membranę jako czujnik różnicy ciśnień
i pojemnościowy sposób pomiaru jej odkształceń. Mierzone ciśnienia działają na membrany
separujące, za którymi znajduje się olej silikonowy. Olej silikonowy przenosi ciśnienie na
sprężystą membranę pomiarową stanowiącą jedną z okładek kondensatora różnicowego. Pod
wpływem różnicy ciśnień działających na membranę następuje proporcjonalne do różnicy
ciśnień ugięcie membrany i zmiana pojemności między nią a zewnętrznymi okładkami
kondensatora.
Rys. 15. Schemat budowy czujnika ciśnienia oleju FCCO 5 produkcji MERA PAFAL:
1 – membrana, 2 – popychacz, 3 – dźwignia, 4 – potencjometr, 5 – wskaźnik wyskalowany
w jednostkach ciśnienia [5, s. 29]
W praktyce przemysłowej najczęściej stosowane są przetworniki tensometryczne. W celu
wykonania dokładnych pomiarów ciśnienia układ tensometryczny wymaga kompensacji
temperatury. Stosuje się wtedy 4 tensometry połączone w układ mostka czteroramiennego.
Dwa z nich są ściskane, a pozostałe dwa tensometry – rozciągane. Ponieważ tensometry
znajdują się w tej samej temperaturze to wpływ temperatury na wynik pomiaru jest bardzo
mały.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie zadania spełniają przyrządy pomiarowe w układach sterowania?
2. Jakie wymagania powinny spełniać urządzenia pomiarowe układach regulacji?
3. Czym różni się czujnik od przetwornika pomiarowego?
4. Jakie sygnały standardowe przyjęto w Polsce dla produkowanej aparatury?
5. Jaka jest zasada działania przetwornika elektropneumatycznego autokompensacyjnego?
6. Które przyrządy pomiarowe nazywamy elektronicznymi?
7. Jaka jest zasada działania elektronicznego termometru rezystancyjnego
8. Jakie materiały stosuje się na termometry rezystancyjne i dlaczego?
9. Co to są termistory?
10. Jakie zjawisko wykorzystano w termometrach termoelektrycznych?
11. Jakie zjawiska wykorzystywane są w manometrach elektrycznych?
12. Jakie czujniki są wykorzystywane na przekształcenie przesunięcia elementów
sprężystych w przetwornikach ciśnienia na sygnał elektryczny?
13. Jak działa czujnik ciśnienia oleju z potencjometrycznym czujnikiem przesunięcia?
14. Dlaczego często stosuje się do pomiarów ciśnienia mostki tensometryczne?
15. Które z poznanych ciśnieniomierzy umożliwiają przesył wyników pomiarów na
odległość?
4.3.3. Ćwiczenia
Ćwiczenie 1
Dobierz czujnik temperatury do pomiaru temperatury gazów i cieczy w rurociągach
i zbiornikach ciśnieniowych, dla P= 10–1000 Mpa i t = –20–400ºC. Wymagania dodatkowe:
wymienny wkład, linia 2, 3 lub 4 przewodowa.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z materiałem teoretycznym o pomiarach temperatury,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) skorzystać z dostępnych kart katalogowych i norm,
4) skorzystać z zasobów sieci Internet,
5) określić typ czujnika i jego producenta (producentów),
6) podać podstawowe dane techniczne,
7) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
−
karty katalogowe różnych czujników temperatury,
−
komputer osobisty klasy PC z dostępem do sieci Internet,
−
materiały i przybory do pisania,
−
literatura wskazana przez nauczyciela.
Ćwiczenie 2
Zmontuj i uruchom elektroniczny termometr z czujnikiem rezystancyjnym i termoparą.
Wyjaśnij funkcje poszczególnych elementów i bloków termometru. Podaj parametry
elementów stosowanych w układzie termometru.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z materiałem teoretycznym o pomiarach temperatury,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) skorzystać z dostępnych kart katalogowych i instrukcji,
4) zapoznać z przyrządem pomiarowym i czujnikami,
5) zmontować układ do pomiaru temperatury,
6) zmontować i uruchomić elektroniczny termometr,
7) dokonać pomiarów temperatury wody w naczyniu z grzałką,
8) przeanalizować działanie poszczególnych układów pomiarowych,
9) przeanalizować działanie analizatora spalin pod kątem skrócenia jego czasu opóźnienia,
10) zaprezentować wykonane ćwiczenie,
11) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
–
elektroniczny miernik temperatury,
–
czujniki rezystancyjne, czujniki termoelektryczne,
–
przewody linii pomiarowej,
–
naczynie z lodem,
–
naczynie z wodą,
–
termometr do porównywania wyników,
–
grzałka o małej mocy,
–
instrukcja obsługi miernika, karty katalogowe czujników,
–
materiały i przybory do pisania,
–
literatura wskazana przez nauczyciela.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1) dobrać czujnik temperatury ?
2) odczytać z katalogów podstawowe dane czujników?
3) narysować schemat blokowy przetwornika autokompensacyjnego?
4) zmontować elektroniczny termometr z czujnikiem?
5) uruchomić elektroniczny termometr?
6) zmontować układ do pomiaru temperatury?
7) narysować układ tzw. mostka tensometrycznego do pomiaru ciśnienia?
8) korzystać z zasobów sieci Internet w zdobywaniu informacji?
9) podać podstawowe zalety elektronicznych przyrządów pomiarowych
w stosunku do przyrządów pomiarowych elektrycznych?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
4.4. Regulatory – budowa i zasada działania
4.4.1. Materiał nauczania
Regulator to urządzenie, którego zadaniem w układzie regulacji jest wyznaczenie uchybu
regulacji (ε) oraz ukształtowanie sygnału wyjściowego (u) o wartości zależnej od wartości
uchybu regulacji, czasu występowania uchybu i szybkości jego zmian, a także zapewnienie
sygnałowi wyjściowemu postaci i mocy potrzebnej do uruchomienia urządzeń
wykonawczych (rys. 16).
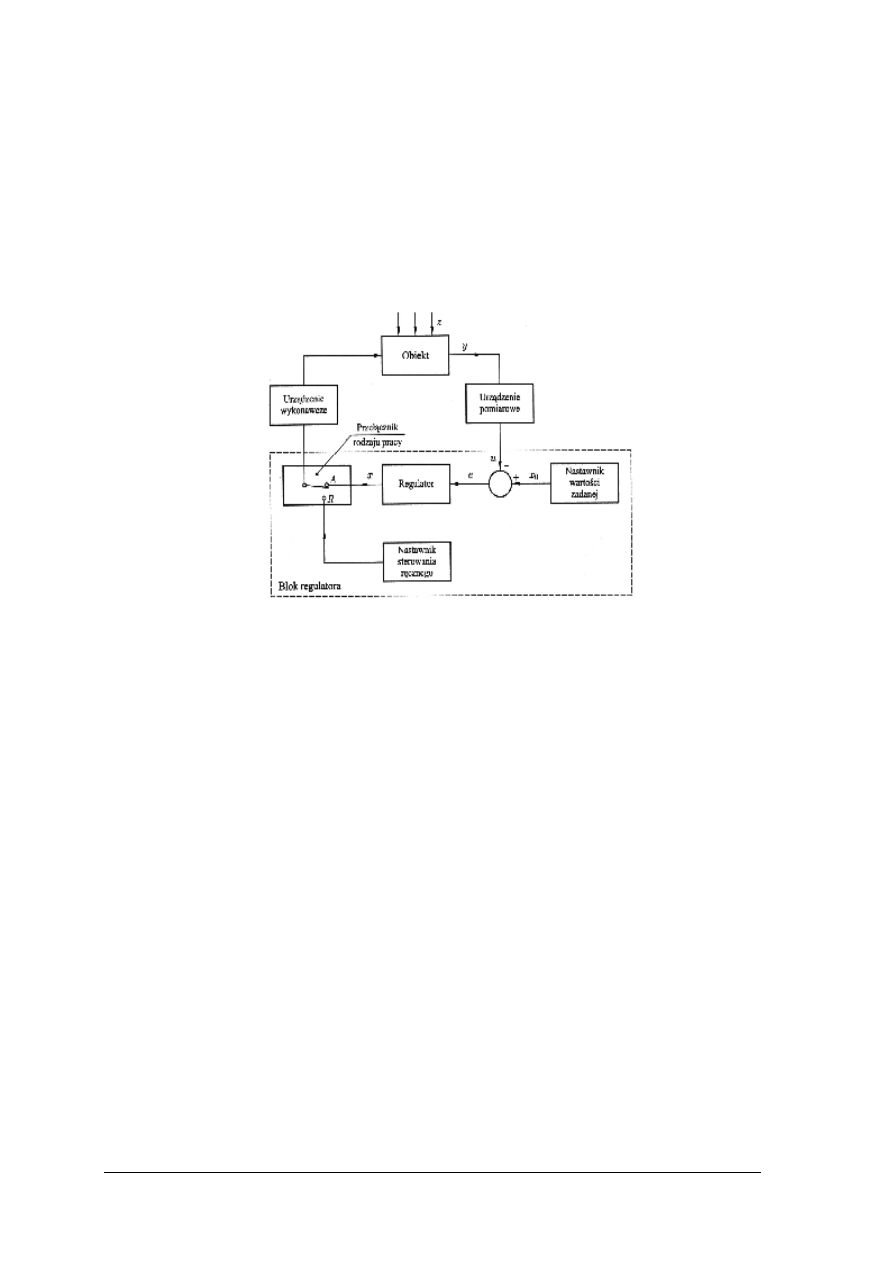
Rys. 16. Schemat zamkniętego układu regulacji [7, s. 38]
Regulator spełnia w układzie jeszcze inne funkcje, jeżeli w swojej strukturze zawiera
dodatkowe urządzenia:
−
nastawnik wartości zadanej (zadajnik),
−
przełącznik rodzaju pracy regulatora,
−
nastawnik sterowania ręcznego,
−
mierniki mierzące wartość wielkości istotnych dla procesu regulacji (wartości zadanej,
wartości uchybu, wartości sygnału wyjściowego regulatora).
Ustawienie przełącznika rodzaju pracy w pozycji R (sterowanie ręczne) umożliwia
oddziaływanie na obiekt regulacji z nastawnika sterowania ręcznego (regulator zostaje
odłączony od układu, a sam układ stał się otwartym układem sterowania). Przy przełączeniu
przełącznika rodzaju pracy w pozycję A (sterowanie automatyczne), sterowanie odbywa się w
układzie zamkniętym. Często regulatory są wykonywane w postaci dwóch konstrukcyjnie
rozdzielonych urządzeń: regulatora i stacyjki manipulacyjnej, w której umieszczone są:
zadajnik, przełącznik rodzaju pracy, nastawnik sterowania ręcznego oraz mierniki.
Regulatory, ze względu na dostarczaną energię, możemy podzielić na:
−
regulatory bezpośredniego działania – nie korzystają z energii pomocniczej,
−
regulatory pośredniego działania – korzystają ze źródła energii pomocniczej:
−
pneumatyczne,
−
hydrauliczne,
−
elektryczne.
Regulatory możemy podzielić także ze względu na rodzaj sygnału wyjściowego na:
−
analogowe, gdzie sygnał wyjściowy ma postać ciągłą – regulatory typu P, I, PI, PD, PID,
−
dyskretne, gdzie sygnał wyjściowy ma postać nieciągłą – regulatory dwustawne,
trójstawne, krokowe, impulsowe, cyfrowe.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
Ze względu na przeznaczenie regulatory mogą być:
−
uniwersalne,
−
specjalizowane (przeznaczone do regulacji jednej wielkości).
Regulatory analogowe – właściwości dynamiczne, charakterystyki
Ze względu na rodzaj stosowanych członów formujących sygnał sterujący wyróżniamy
następujące typy regulatorów:
−
regulator typu P, realizujący działanie proporcjonalne,
−
regulator typu I, realizujący działanie całkujące,
−
regulator typu PI, realizujący działanie proporcjonalno-całkujące,
−
regulator typu PD, realizujący działanie proporcjonalno-różniczkujące,
−
regulator typu PID, realizujący działanie proporcjonalno-całkująco-różniczkujące.
Regulator proporcjonalny P charakteryzuje się tym, że wartość sygnału wyjściowego
regulatora jest proporcjonalna do wartości uchybu regulacji. Parametrem nastawialnym
regulatora jest
wzmocnienie k
p
, Zamiast wzmocnienia k
p
często używa się jego odwrotność x
p
=
p
1
k
100%, zwaną zakresem proporcjonalności i wyrażoną w procentach. Zakres
proporcjonalności jest to przyrost sygnału wejściowego niezbędny do uzyskania pełnego
zakresu zmian sygnału wyjściowego.
Regulator całkujący I charakteryzuje się tym, że prędkość zmian sygnału wyjściowego
jest proporcjonalna do wartości uchybu regulacji. Parametrem charakterystycznym regulatora
całkującego jest czas całkowania T
i
określony jako czas po którym sygnał wyjściowy po
skokowej zmianie uchybu regulacji osiągnie wartość równą wartości skoku.
Regulator proporcjonalno–całkujący PI charakteryzuje się tym, że sygnał wyjściowy jest
sumą działania proporcjonalnego i całkującego. Regulator ma dwa parametry nastawialne:
wzmocnienie k
p
czas całkowania T
i
.
Parametr T
i
określa „intensywność” działania całkującego i często jest nazywany czasem
zdwojenia. Jest on równy czasowi, po jakim odpowiedź członu całkującego na skokową
zmianę sygnału ε od wartości zerowej staje się równa sygnałowi ε, a tym samym sygnał
wyjściowy regulatora PI lub PID osiąga podwójną wartość działania proporcjonalnego.
Regulator proporcjonalno–różniczkujący PD powstaje przez dodanie do działania
proporcjonalnego działania różniczkującego. Działanie różniczkujące regulatora polega na
tym, że wartość sygnału wyjściowego jest proporcjonalna do prędkości zmian uchybu
regulacji. Parametrem charakterystycznym regulatora jest czas różniczkowania T
d
.
Parametr T
d
określający proporcję, z jaką uwzględnia się działanie różniczkujące
w regulatorze nazywany jest czasem wyprzedzania. Jest on równy czasowi, po jakim liniowo
narastający sygnał ε(t) = at będzie równy sygnałowi wyjściowemu członu różniczkującego T
d
=
dt
d
ε
.
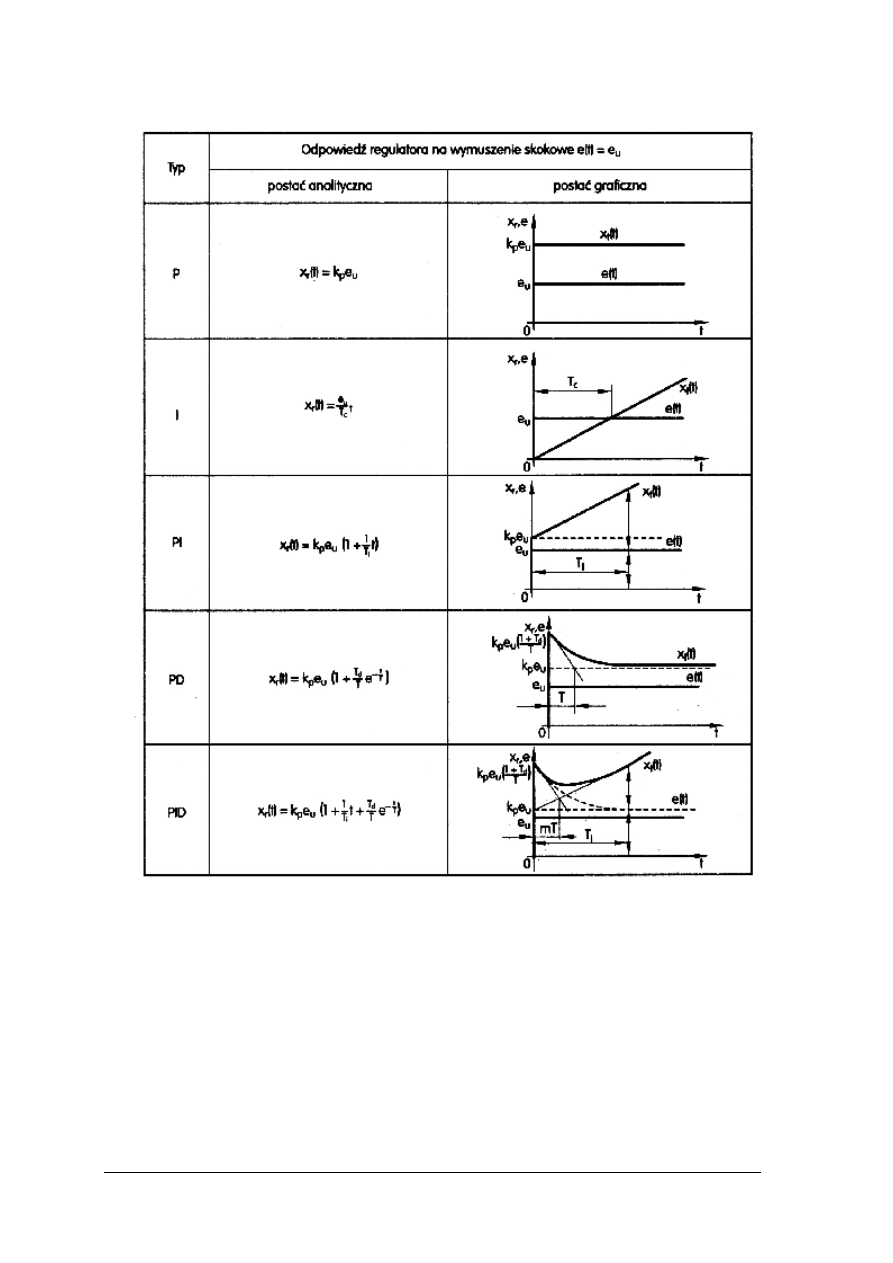
Odpowiedzi regulatorów na wymuszenie skokowe w postaci analitycznej i graficznej
przedstawia tabela 1.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
Tabela 1. Odpowiedzi podstawowych typów regulatorów na wymuszenie skokowe [13, s. 47]
Działanie układów regulacji z przedstawionymi w tabeli 1 regulatorami zależy od doboru
parametrów (nastaw) tych regulatorów.
W produkowanych regulatorach uniwersalnych stosowane są najczęściej następujące
zakresy zmian poszczególnych parametrów:
−
zakres proporcjonalności x
p
w granicach 3–400%
−
czas zdwojenia T
i
w granicach 3 s
–
30 min,
−
czas wyprzedzania T
d
w granicach 0
–
15 min.
−
Regulatory cyfrowe
W budowie współczesnych układów regulacji wykorzystywane są powszechnie
komputery i mikoroprocesory. W związku z tym pojawiła się nowa klasa regulatorów:
regulatory cyfrowe. Początkowo były one realizowane jako podprogramy w dużych
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
komputerach sterujących procesami, obecnie budowane są również jako wyodrębnione
aparaty tablicowe (rys. 17) i klasyczne regulatory z wyjściem analogowym. Regulatory
realizowane są również jako programy w sterownikach komputerowych oraz sterownikach
programowalnych.
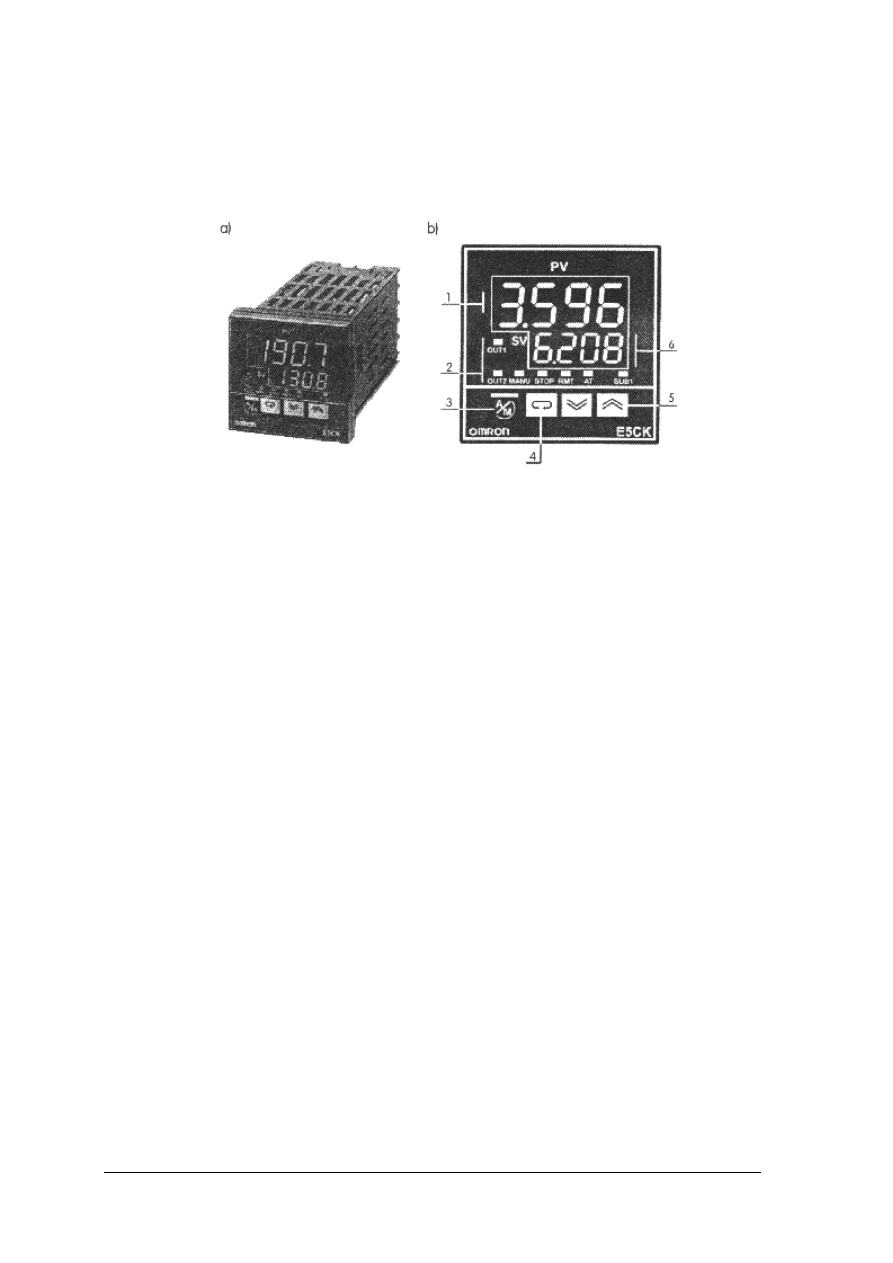
Rys. 17. Dwukanałowy regulator cyfrowy temperatury: a) widok perspektywiczny, b) płytka
czołowa; 1 – wyświetlacz temperatury regulowanej, 2 – lampki sygnalizacyjne, że sygnały
wyjściowe są niezerowe 3 – przycisk do wybrania trybu działania na obiekt
(A – automatyczny, M – ręczny), 4 – przycisk zmiany MENU regulatora (zmiana
regulatora), 5 – przyciski do zmiany wartości zadanych i nastaw regulatora,
6 – wyświetlacz wartości zadanej i nastaw aktualnie wybranych przyciskiem 4 [8, s. 188]
Zmieniające się w sposób ciągły wartości wielkości procesowej w celu przetworzenia
w regulatorze cyfrowym, muszą być przedstawione w postaci cyfrowej, również wartość
sterująca w systemie cyfrowym nie może być obliczana w sposób ciągły. Są one obliczane co
pewien czas, zwany czasem kwantowania (albo próbkowania) T
p
, w chwilach próbkowania
t
k
= k T
p
., na podstawie wartości uchybu regulacji w chwili bieżącej i ewentualnie
w chwilach poprzedzających.
Regulatory dwustawne
Regulacja dwustawna (dwupołożeniowa) jest najpopularniejszym sposobem regulacji,
szczególnie w urządzeniach domowych ale również w urządzeniach przemysłowych. Istotą
tej regulacji jest, że na wyjściu regulatora otrzymujemy sygnał sterujący, który może przyjąć
tylko dwa stany, umownie nazywane stanami 0 i 1. Stany te odpowiadają za załączenie lub
wyłączenie dopływu energii (załączenie lub wyłączenie wyłącznika) lub materiału do obiektu
(zamykanie lub otwieranie zaworu). Regulację dwustawną stosuje się do regulacji obiektów
charakteryzujących się dużymi bezwładnościami. Do obiektów takich należą np.: obiekty
cieplne (ogrzewane jak i chłodzone), zbiorniki, i in. Parametrami procesów utrzymywanych
za pomocą regulacji dwustawnej to m.in.: temperatura, ciśnienie, poziom, napięcie
elektryczne.
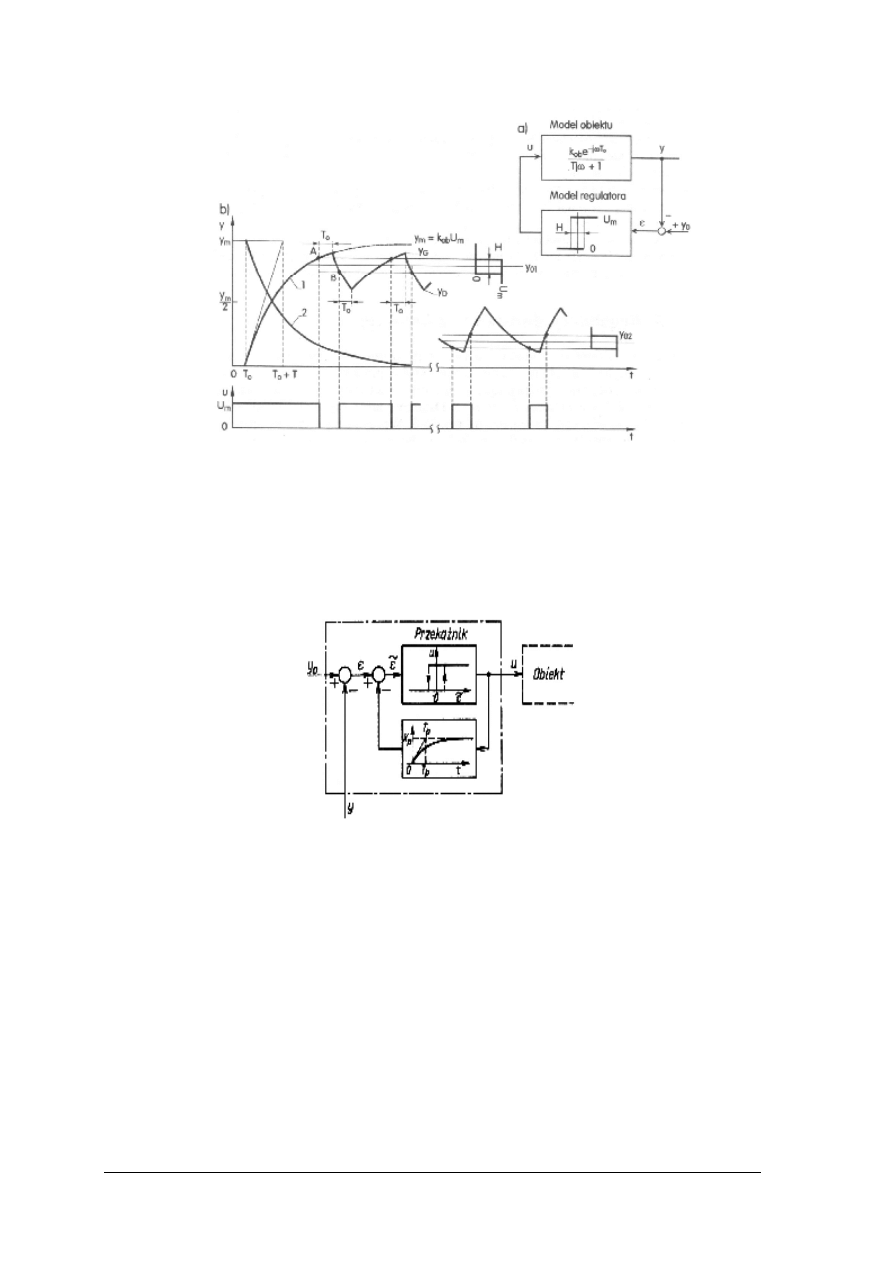
Typowym przykładem regulacji dwustawnej jest proces zmiany temperatury obiektu
cieplnego (rys. 18). Obiekt ten możemy opisać za pomocą prostego modelu liniowego, inercji
pierwszego rzędu z opóźnieniem o parametrach:
−
k
ob
– wzmocnienie statyczne,
−
T
o
– czas opóźnienia,
−
T – stała czasowa inercji (zastępcza).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
Rys. 18. Układ regulacji dwustawnej temperatury: a) schemat, b) przebiegi sygnałów [4, s. 205]
Zmniejszenie amplitudy oscylacji można uzyskać albo przez częstszą zmianę sygnały
sterującego albo przez zastosowanie tzw. korekcyjnego sprzężenia zwrotnego. W tym celu,
wokół regulatora wprowadza się ujemne, dynamiczne sprzężenie zwrotne. Są to najczęściej
podgrzewanerezystory lub termoelementy o odpowiednich stałych czasowych. Element
korekcyjny ma charakter inercyjny o wzmocnieniu K
P
i stałej czasowej T
P
(rys. 19).
Rys. 19. Układ regulatora dwustanowego z korekcyjnym sprzężeniem zwrotnym [7, s.94]
Sygnał wyjściowy elementu dynamicznego korekcyjnego nadąża szybciej za sygnałem
wyjściowym przekaźnika niż sygnał wyjściowy obiektu, który reaguje z opóźnieniem. Dzięki
ujemnemu sprzężeniu zwrotnemu od układu korekcyjnego do wejścia przekaźnika,
w układzie wystąpią oscylacje o okresie zależnym głównie od parametrów przekaźnika
i członu korekcyjnego, a w niewielkim stopniu od parametrów obiektu. Wartości K
P
i T
P
są
znacznie mniejsze od wartości odpowiednich parametrów obiektu – wzmocnienia K
0
i stałej
czasowej T
0
. Sprzężenie zwrotne korekcyjne o małej stałej czasowej wywołuje wzrost
częstotliwości oscylacji. Natomiast duża bezwładność obiektu powoduje, że amplituda
sygnału wyjściowego y, wywołana tymi szybkimi zmianami sygnału wejściowego u, nie
będzie duża.
Regulator dwustanowy z korekcyjnym sprzężeniem zwrotnym zmniejsza znacznie
amplitudę oscylacji w porównaniu z regulatorem bez korekcji.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
Regulatory trójstawne
Regulatory trójstawne (trójpołożeniowe) charakteryzują się tym, że ich sygnał wyjściowy
może przyjmować jedną z trzech wartości, oznaczonych jako –1, 0 i 1. Wartości te mogą
odpowiadać np. sterowaniu napędu elektrycznego – ruch w lewo, hamowanie, ruch w prawo;
oraz działaniu – grzanie, stygnięcie, chłodzenie lub – grzanie z mocą znamionową, grzanie
z mocą mniejszą niż znamionowa, stygnięcie.
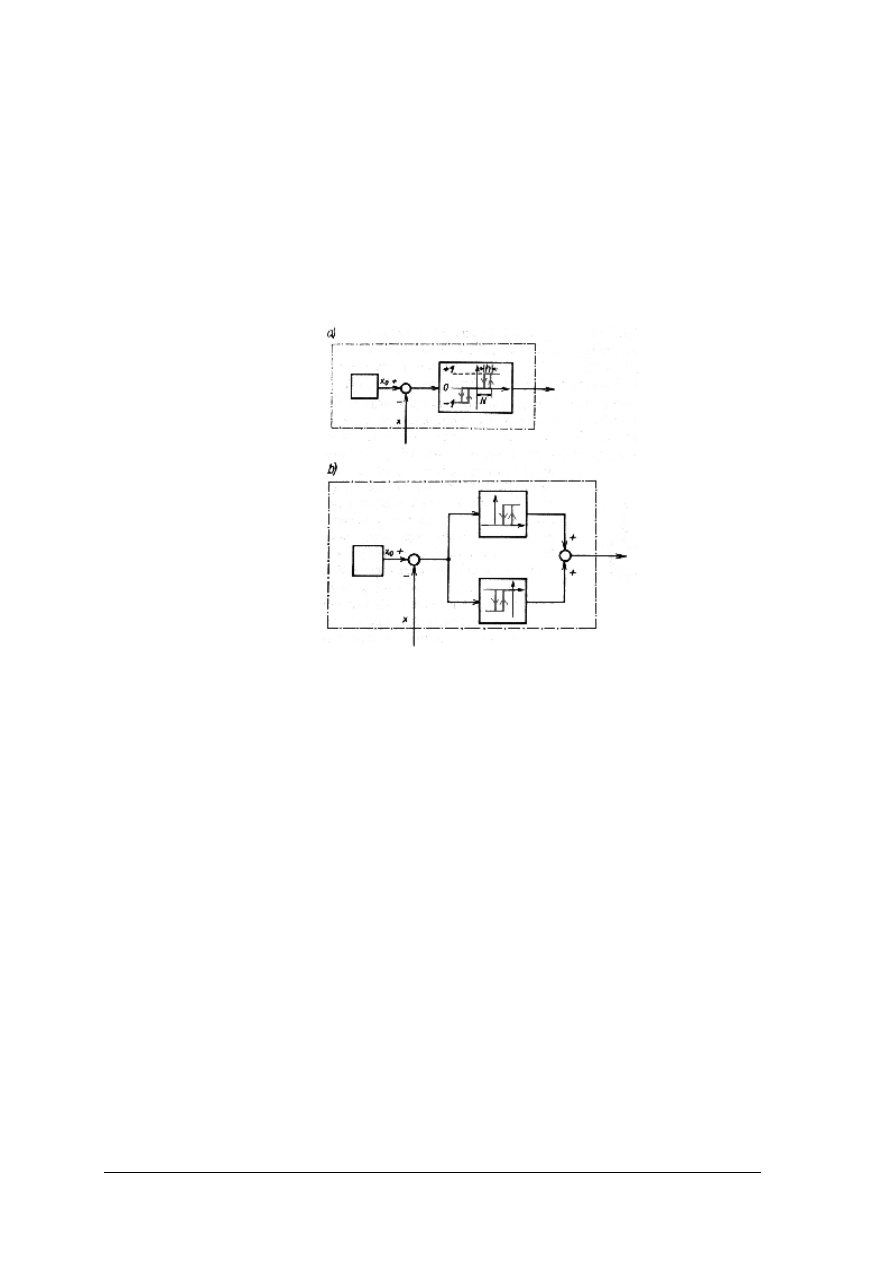
Funkcję regulatora trójstawnego pełni przekaźnik trójpołożeniowy (rys. 20 a). Często
w rozwiązaniach praktycznych zamiast elementu trójstawnego stosowane są dwa elementy
dwustanowe (po zsumowaniu ich charakterystyk otrzymuje się charakterystykę elementu
trójstawnego – rys.20 b).
Rys. 20.
Schemat blokowy regulatora trójstawnego: a) z elementem
trójstawnym, b) z dwoma elementami dwustanowymi [7, s. 235]
Regulatory krokowe
Regulatory trójstawne, podobnie jak wcześniej omówione regulatory dwustawne, mogą
być wyposażone w układy korekcyjne. Regulatorem krokowym nazywamy układ złożony
z regulatora trójstawnego objętego korekcyjnym ujemnym inercyjnym sprzężeniem zwrotnym
oraz z silnika.
4.4.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak klasyfikujemy regulatory?
2. Czym charakteryzują się regulatory P, PI i PD?
3. Jakie parametry nastawialne ma regulator PID?
4. Na czym polega kwantowanie w chwilach próbkowania sygnałów ciągłych w regulatorze
cyfrowym?
5. Jakie wartości są wyświetlane na wyświetlaczach płyty czołowej cyfrowego regulatora
temperatury?
6. Na czym polega istota regulacji dwustawnej?
7. W jaki sposób można uzyskać zmniejszenie amplitudy oscylacji sygnału regulowanego
w regulacji dwustawnej?
8. Czym charakteryzuje się regulator trójstawny i gdzie znalazł zastosowanie?
9. Jakie zakresy zmian parametrów nastaw stosuje się w regulatorach uniwersalnych?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
4.4.3 Ćwiczenia
Ćwiczenie 1
Na podstawie rysunku zinterpretuj wpływ własności dynamicznych regulatorów na
tłumienie zakłóceń i własności dynamiczne układu regulacji. Podaj jaki obiekt podlega
procesowi regulacji?
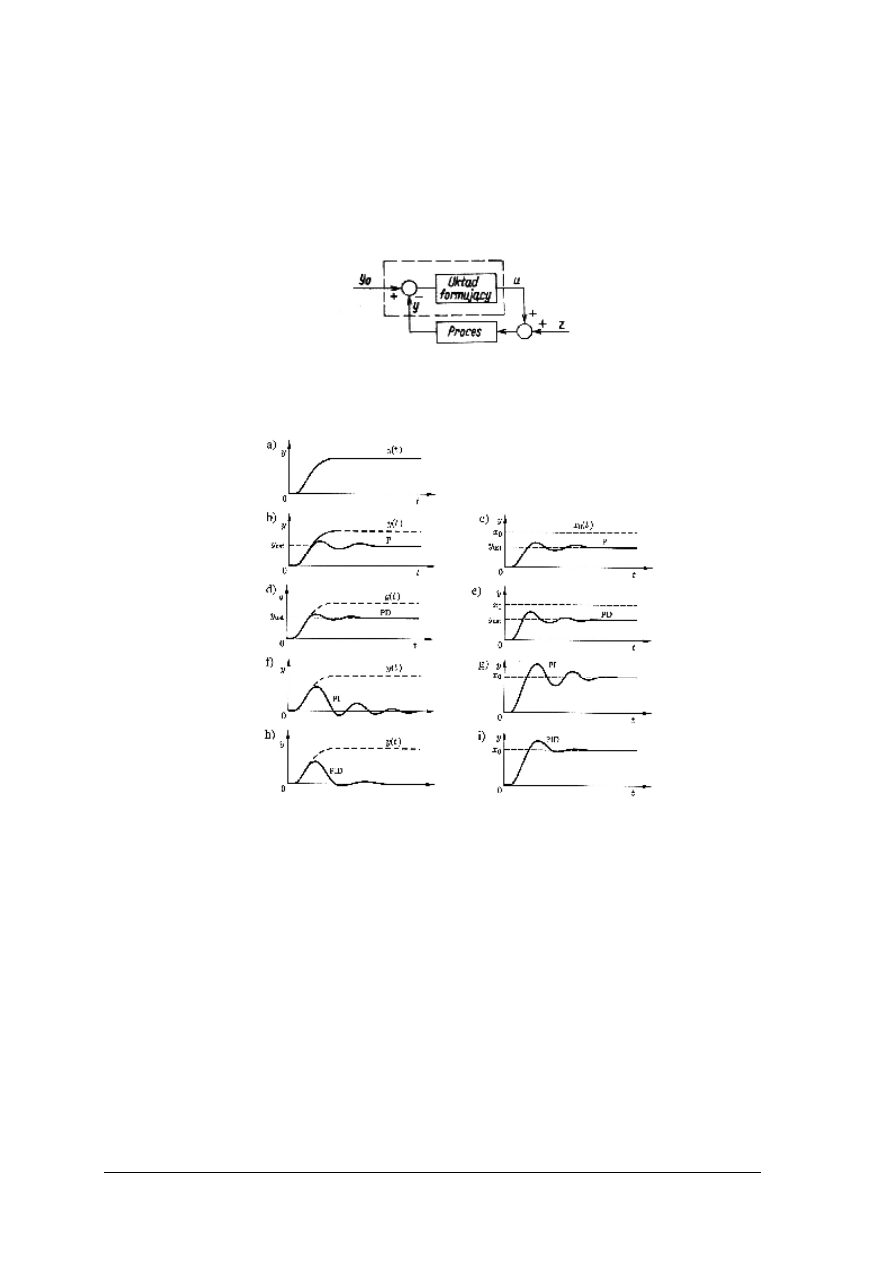
Rysunek 1 do ćwiczenia 1. Schemat blokowy układu regulacji [8, s. 81]
Odpowiedź na skok zakłócenia z Odpowiedź na skok wartości zadanej y
0
Rysunek 2 do ćwiczenia 1. Wpływ członów dynamicznych regulatora na tłumienie
zakłóceń i właściwości dynamiczne układu regulacji:
a) odpowiedź skokowa obiektu; b), c) odpowiedzi skokowe
układu z regulatorem typu P; d), e) odpowiedzi skokowe
układu z regulatorem typu PD; f), g) odpowiedzi skokowe
układu z regulatorem typu PI; h), i) odpowiedzi skokowe
układu z regulatorem typu PID [8, s. 81]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z materiałem teoretycznym o regulatorach P, PD,PI i PID,
2) rozpoznać na podstawie odpowiedzi skokowej obiekt regulacji (model dynamiczny),
3) zinterpretować wpływ poszczególnych regulatorów (ich członów) na tłumienie
zakłócenia na wejściu obiektu,
4) zinterpretować wpływ poszczególnych regulatorów (ich członów) na właściwości
dynamiczne układu regulacji,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
5) wyciągnąć wnioski z powyższej analizy,
6) zaprezentować wykonane ćwiczenie,
Wyposażenie stanowiska pracy:
−
zeszyt,
−
przybory do pisania,
−
literatura wskazana przez nauczyciela.
Ćwiczenie 2
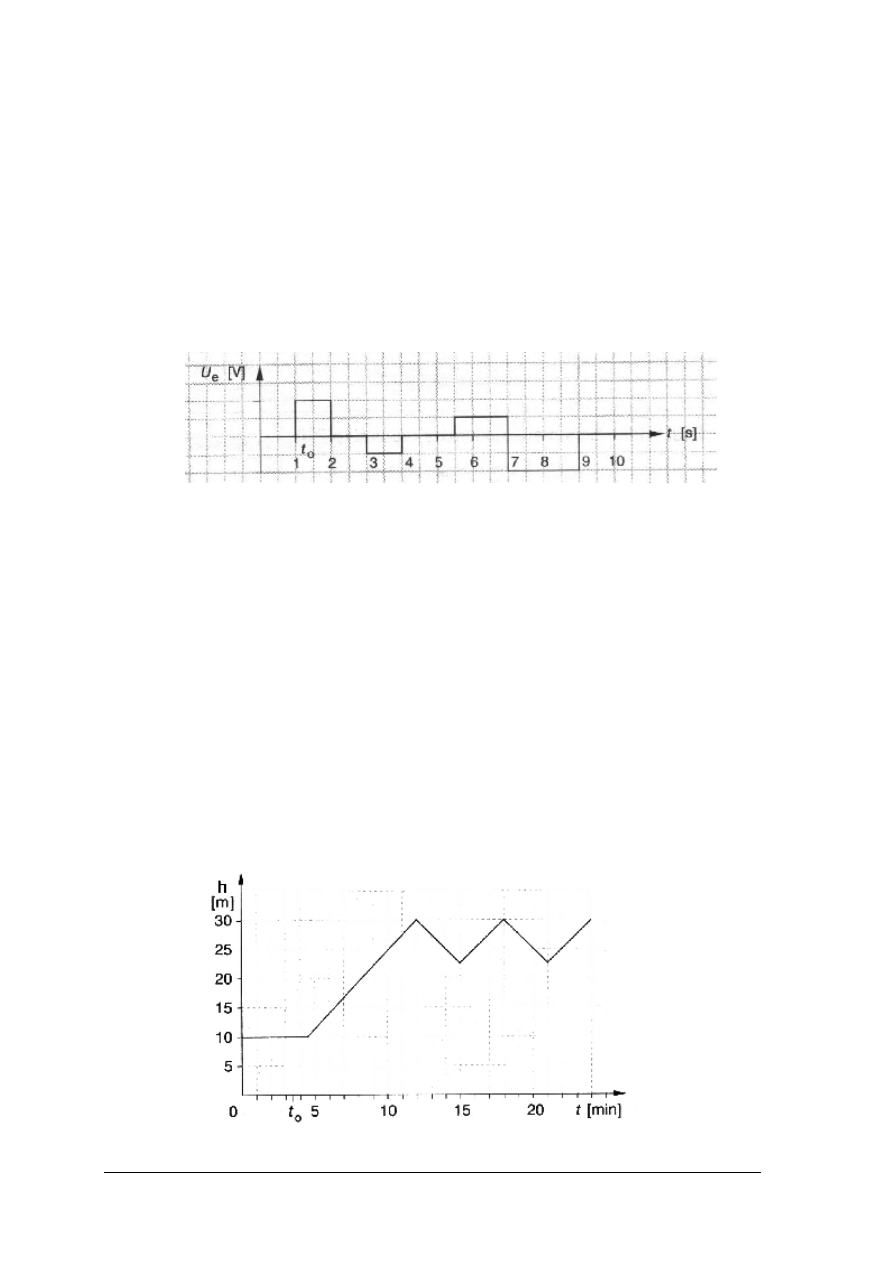
Na rysunku przedstawiono przebieg uchybu regulacji U
e
. Narysuj przebieg sygnału
sterującego U
y
regulatora PI. Wartości nastaw regulatora wynoszą: K
p
= 2, T
i
= 1s.
Rysunek do ćwiczenia 2
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z materiałem teoretycznym o regulatorze PI i jego nastawach,
2) narysować przebieg sygnału sterującego,
3) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
−
zeszyt,
−
przybory do pisania i rysowania,
−
literatura wskazana przez nauczyciela.
Ćwiczenie 3
Rysunek przedstawia przebieg czasowy poziomu cieczy w zbiorniku w układzie regulacji
z regulatorem dwustawnym. Wiedząc, że proces regulacji rozpoczął się w chwili t
0
, oblicz
częstotliwość przełączania regulatora w stanie ustalonym.
Rysunek do ćwiczenia 3

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się materiałem teoretycznym o regulacji dwustawnej,
2) przerysować podany rysunek na kartkę papieru milimetrowego,
3) odczytać z rysunku czas opóźnienia obiektu regulacji,
4) określić górną i dolną wartość przełączania regulatora,
5) obliczyć szerokość pętli histerezy,
6) określić czas włączenia i wyłączenia regulatora,
7) obliczyć częstotliwość przełączania regulatora,
8) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
–
zeszyt,
–
kartki papieru milimetrowego,
–
przybory do pisania i rysowania,
–
literatura wskazana przez nauczyciela.
Ćwiczenie 4
Dokonaj badania przemysłowego regulatora dwustawnego. Sporządź charakterystyki
i dokumentacje regulatora.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się materiałem teoretycznym dotyczącym regulatorów dwustawnych,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) zapoznać się ze strukturą regulatora, rodzajem i zakresem nastaw oraz możliwością
wyłączenia korekcyjnego sprzężenia zwrotnego,
4) zmontować układ do zdejmowania charakterystyki statycznej regulatora,
5) dokonać pomiarów a wyniki zanotować w przygotowanej tabelce,
6) wykreślić charakterystykę statyczną regulatora bez korekcyjnego sprzężenia zwrotnego,
7) wyznaczyć zakres strojenia histerezy H,
8) sporządzić charakterystykę u
śr
= f(ε) dla kilku nastaw regulatora [u
śr
= t
z
/(t
z
+ t
w
)],
9) sporządzić dokumentację techniczną z wykonanych badań,
10) sporządzić wnioski z przeprowadzonych badań,
Wyposażenie stanowiska pracy:
−
regulator dwustawny,
−
instrukcja obsługi, karta katalogowa,
−
miernik uniwersalny,
−
instrukcja ćwiczenia,
−
stoper,
−
kartki papieru,
−
przybory do pisania i rysowania,
−
literatura wskazana przez nauczyciela.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
4.4.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1) zinterpretować wpływ własności dynamicznych regulatorów P, PD, PI i PID na
tłumienie zakłóceń na wejściu układu regulacji?
2) zinterpretować wpływ własności dynamicznych regulatorów P, PD, PI i PID na
właściwości dynamiczne układu regulacji?
3) narysować przebieg sygnału sterującego regulatora PI na podstawie przebiegu
uchybu regulacji?
4) wyznaczyć na podstawie przebiegu regulacji dwupołożeniowej częstotliwość
przełączania regulatora dwustawnego?
5) wyznaczyć charakterystykę statyczną regulatora dwustawnego?
6) narysować zależność odchylenia wartości średniej y
śr
od wartości zadanej
w regulatorze dwustawnym bez korekcji?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
4.5. Sterowniki PLC – budowa i zasada działania
4.5.1. Materiał nauczania
Budowa sterownika PLC
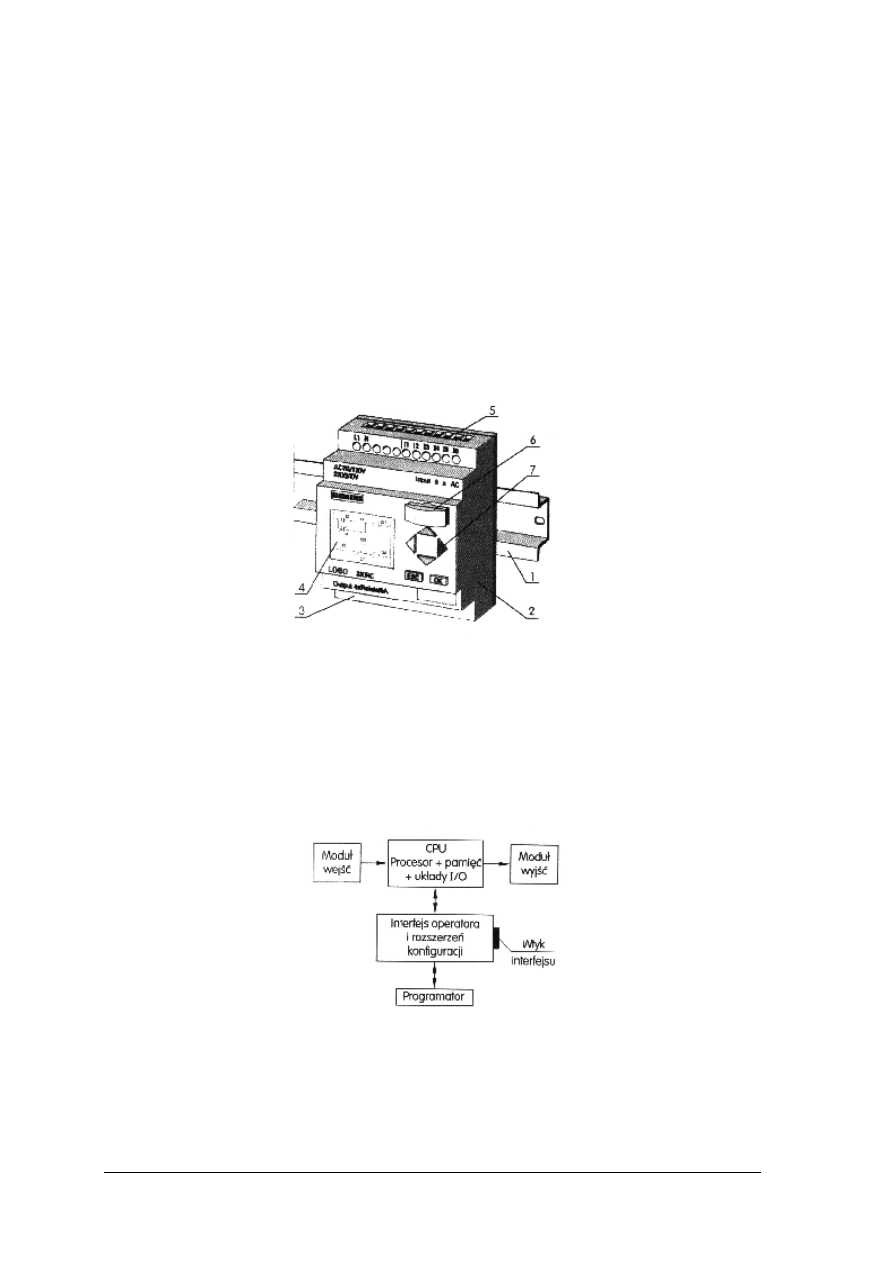
Sterowniki programowalne PLC mogą być wykonane w postaci kompaktowej jako
samodzielnie działające bloki (do zamontowania na szynie DIN – rys. 21) lub modułowej
(pakietowej), która pozwala na modernizację z rozszerzeniem możliwości urządzenia.
Sterowniki modułowe są wsuwane do kasety, gdzie łączą się z płytą bazową sterownika.
W jednej kasecie może być kilka takich modułów. Sterowniki w wersji kasetowej są
przeznaczone do sterowania bardziej złożonych obiektów (o kilkuset wejściach i wyjściach).
Sterowniki kompaktowe mają niewielką liczbę wejść i wyjść (od 10 do 32).
Rys. 21. Widok najmniejszego sterownika PLC zamocowanego na listwie DIN:
1 – listwa DIN, 2 – sterownik LOGO, 3 – wyjścia, 4 – wyświetlacz,
5 – wejścia, 6 – kasetka z wsuwaną pamięcią flash, 7 – przyciski do
programowania [8, s. 192]
Sterownik PLC (rys. 22) zbudowany jest z: układu zasilania napięciowego (zasilacza),
modułu sygnałów wejściowych, jednostki centralnej z mikroprocesorem, pamięci programu
oraz modułu sygnałów wyjściowych. Moduł jednostki centralnej CPU podłącza się do źródła
napięcia (zazwyczaj jest to napięcie stałe +24 V).
Rys. 22. Schemat funkcjonalny sterownika PLC [8, s. 192]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
Blok pamięci zawiera następujące obszary połączone wewnętrzną magistralą sterownika:
–
pamięć danych typu ROM lub EPROM, przechowuje dane i instrukcje programu
użytkownika, może być rozszerzana za pomocą dodatkowych kart lub modułów,
–
pamięć robocza – szybka pamięć typu RAM, w trakcie przetwarzania programu przez
użytkownika kopiowane są do niej dane,
–
pamięć systemowa zawiera zmienne (operandy), na których wykonywane są operacje
programu (zmienne te zbierane są w obszarze zwanym obszarem operandów – wielkość
obszaru zależy od zastosowanego CPU).
Moduł sygnałów wejściowych zawiera układy elektroniczne zamieniające sygnały
pochodzące z urządzeń zewnętrznych na sygnały logiczne akceptowane przez sterownik.
Układy stosowane w tym module to: dzielniki napięcia, filtry RC tłumiące zakłócenia, diody
chroniące, układy prostownicze, transoptory izolujące obwody wejściowe i magistralę
sterownika. Sterowniki zawierają zazwyczaj moduły 8, 16 lub 32 wejść binarnych, które
są multipleksowane. Ich stan sygnalizowany jest diodą LED.
Moduły sygnałów wyjściowych zawierają zazwyczaj moduły 8 lub 16 wyjść binarnych
trzech rodzajów:
–
wyjścia przekaźnikowe zapewniające całkowitą separację galwaniczną wewnętrznych
układów sterownika i obwodów wejściowych,
–
wyjścia z łącznikami triakowymi stosowane dla zasilania odbiorników prądu
przemiennego (np. 230 V/ 50 Hz, AC),
–
wyjścia z łącznikami tranzystorowymi stosowane dla zasilania odbiorników napięcia
stałego (np. 24 V DC, 200 mA).
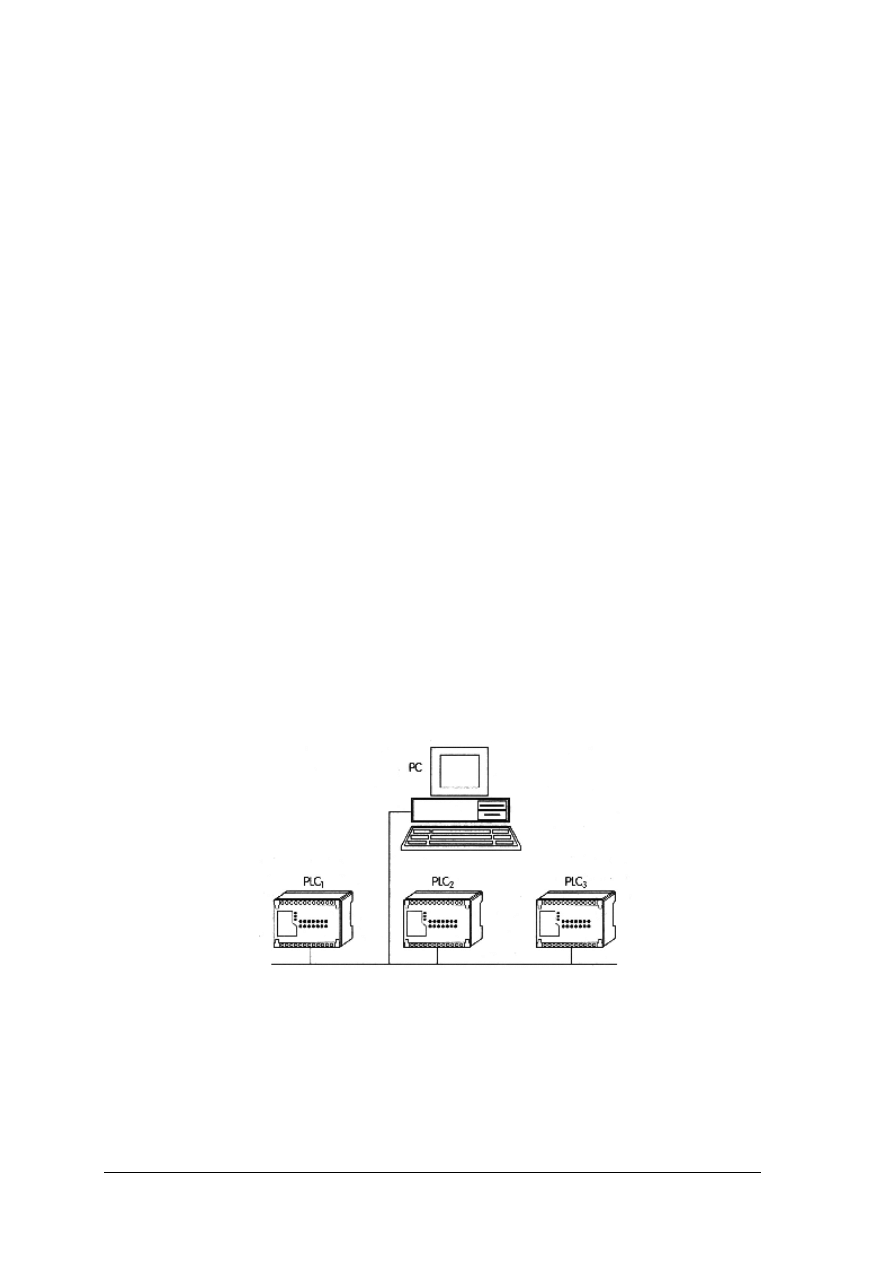
Dla obsługi poszczególnych procesów przemysłowych zazwyczaj nie wystarczy jeden
sterownik. Poszczególne jednostki produkcyjne są wówczas sterowane poprzez sterowniki
lokalne, podrzędne (Slave), połączone przy pomocy sieci np. PROFIBUS–DP
ze sterownikiem nadrzędnym (Master), który zarządza całym systemem (rys. 23). Do
magistrali można podłączyć inne urządzenia jak np. sterowniki, stacje i panele operatorskie,
a także inne sieci pozwalające na współpracę z urządzeniami pomiarowymi i wykonawczymi.
Rys. 23. Sieć sterownikowa. [8, s. 194]
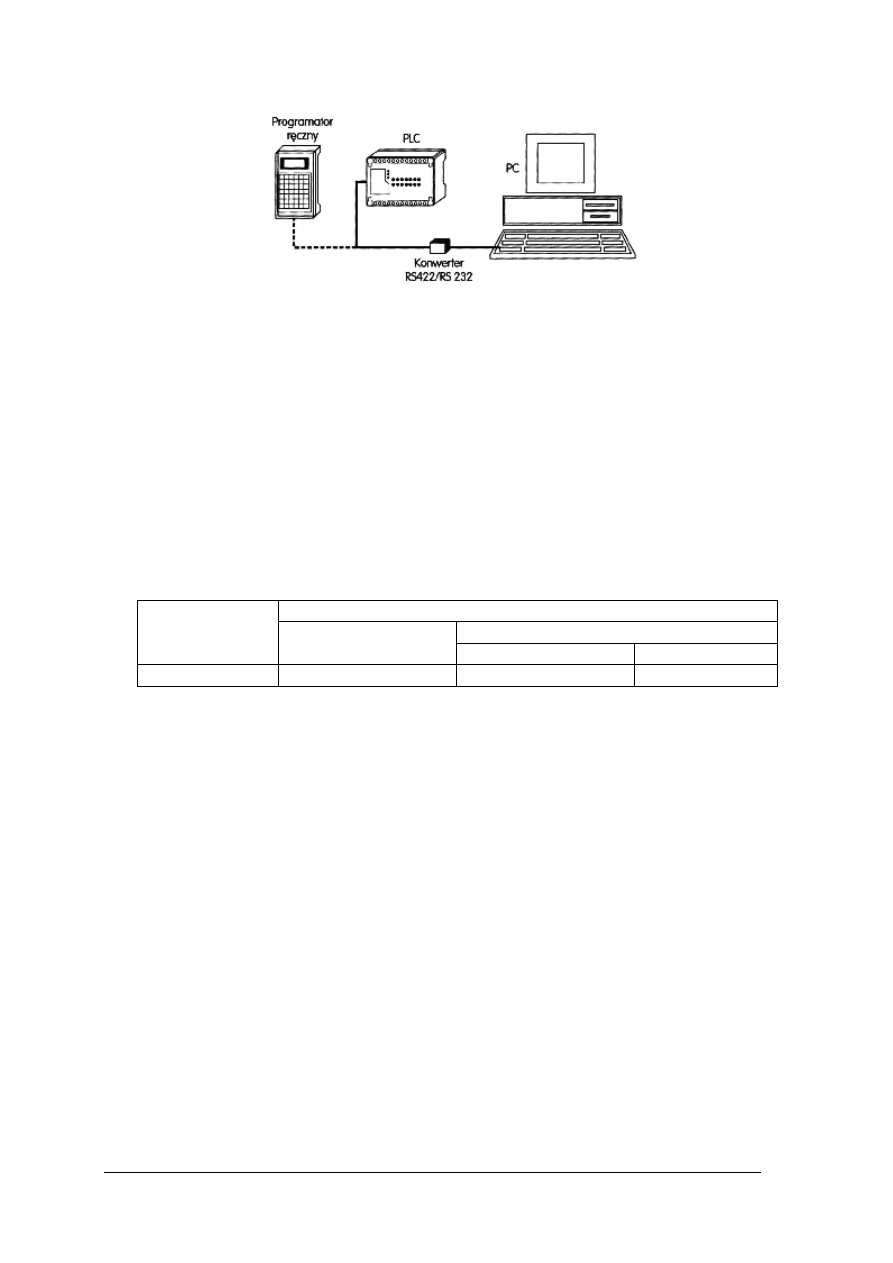
Sterowniki programuje się najłatwiej przy użyciu komputerów PC lub programatora
ręcznego (rys. 24) za pomocą specjalnego oprogramowania, dostarczanego przez producenta
sterowników. Sterownik podczas programowania może być połączony z komputerem za
pomocą interfejsu szeregowego np. RS – 232C
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
Rys. 24. Ilustracja możliwości programowania sterownika PLC [8, s. 193]
Zasada działania sterownika SPS z programowalną pamięcią
Sygnały wejściowe sterownika są sygnałami cyfrowymi (np. sygnałowi 1 odpowiada
napięcie stałe o wartości +24 V a sygnałowi 0 napięcie 0 V). Sterownik SPS pracuje zgodnie
z określonym programem sterowniczym. Program ten zawiera ciąg rozkazów logicznych,
które sterują pracą urządzeń. Są one tworzone przy użyciu komputera lub programatorów
ręcznych. Za pomocą komputera można tworzyć program sterowniczy w postaci schematu
stykowego KOP, schematu logicznego FUP lub listy rozkazów AWL (przy użyciu
programatorów ręcznych tylko w postaci listy rozkazów AWL).
Programowanie sterownika polega na wpisaniu do jego pamięci programu sterowniczego,
w postaci listy pojedynczych rozkazów (lista rozkazów AWL). Kolejność wpisywania
rozkazów wynika z zasad programowania danego sterownika. Rozkaz (rys. 25) składa się
z kilku części:
Rozkaz
Operand
Adres
Operacja
Symbol
Parametr
0000
L
E
0.01
Rys. 25. Przykład rozkazu [15, s. 6]
−
adresu – określa numer miejsca w pamięci sterownika rozkazu (sterownik wykonuje
rozkazy w kolejności wynikającej z adresów),
−
operacji – określa zadanie sterownika (rodzaj funkcji logicznej),
−
operandu składającego się z symbolu i parametru; podaje czego ma dotyczyć dana
operacja (określa sygnały wejściowe i wyjściowe sterownika powiązane ze sobą
funkcjami logicznymi),
−
symbolu – określa rodzaj operandu,
−
parametru – określa konkretny parametr.
Dodatkowo, dla lepszego zrozumienia programu, można dodać komentarz do każdego
wiersza programu. Lista rozkazów AWL zawiera określoną liczbę kolejno ponumerowanych
wierszy, którą dzieli się na segmenty.
Operacje określają połączenia sygnałów niezbędne do działania programu. Rozróżnia się
połączenia podstawowe i funkcje specjalne.
Lista przyporządkowująca zawiera wykaz wszystkich elementów sterujących
i wykonawczych przyłączonych do wejść i wyjść sterownika.
Program sterowniczy sporządzony za pomocą komputera (programatora) przesyłany jest
do sterownika i zapamiętywany w jego pamięci. Sterownik z programowalną pamięcią
pracuje sekwencyjnie, tzn. że rozkazy programowe są opracowane kolejno jeden po drugim.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
Pracuje on także cyklicznie powtarzając ciągle opracowywanie rozkazów programowych.
Czas cyklu programatora oznacza czas opracowania wszystkich rozkazów zawartych
w danym programie.
Ze względu na rodzaj pamięci sterowniki dzielimy na:
–
sterowniki swobodnie programowalne z na stałe wbudowaną do sterownika pamięcią
RAM,
–
sterowniki z wymienną pamięcią, wyposażone w pamięć typu ROM w postaci
oddzielnego modułu.
Podstawy programowania układów sterowania. Schemat stykowy KOP
Podstawą schematu stykowego KOP jest schemat rozwinięty układu sterowania
stycznikowego. W schemacie stykowym KOP poszczególne gałęzie prądowe przedstawia się
poziomo jedna pod drugą (umożliwia to prezentację programu na monitorze komputera oraz
jego wydruk na drukarce). W schemacie stykowym KOP stosuje się następujące symbole:
– ––][–– jest to symbol niezanegowanego sygnału wejściowego (sygnał 1 jest
rozpoznawany przez sterownik jako 1, a sygnał 0 jako 0),
– ––]/[–– jest to symbol zanegowanego sygnału wejściowego,
– ––()–– jest to symbol niezanegowanego sygnału wyjściowego,
– ––(/)–– jest to symbol zanegowanego sygnału wyjściowego.
Powyższe symbole po uzupełnieniu adresami operandów stanowią program stykowy
KOP.
4.5.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Z jakich modułów składa się sterownik PLC?
2. Jakiego rodzaju układy elektroniczne składają się na moduł wejściowy?
3. Jakie są stosowane rodzaje wyjść sterownika PLC?
4. Jakie obszary pamięci zawiera blok pamięci?
5. W jaki sposób odbywa się komunikacja programatora i sterownika?
6. Z jakich podstawowych części składa się rozkaz?
7. W jaki sposób oznacza się rodzaj operandów?
8. Jaka jest różnica między sterownikiem swobodnie programowalnym a sterownikiem
z wymienną pamięcią?
9. W jaki sposób oznacza się kolejność rozkazów programu sterownika?
10. W jaki sposób tworzy się listę rozkazów AWL?
11. Jakie informacje zawiera lista przyporządkowująca?
12. Jakie symbole stosuje się na schematach KOP i co one oznaczają?
4.5.3. Ćwiczenia
Ćwiczenie 1
Określ rodzaj wyjść sterownika oraz parametry sygnałów wyjściowych na podstawie
dokumentacji technicznej. Jakimi urządzeniami może on sterować?
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z przygotowaną dokumentacją techniczną sterownika,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
2) wypisać dane techniczne,
3) wyjaśnić do sterowania jakimi urządzeniami może służyć ten typ sterownika,
4) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
−
dokumentacja techniczna sterownika,
−
zeszyt,
−
przybory do pisania,
–
literatura wskazana przez nauczyciela.
Ćwiczenie 2
Na podstawie kart katalogowych oraz informacji z Internetu podaj jakie występują
konstrukcje sterowników PLC oraz w jaki sposób należy je instalować.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z przygotowaną dokumentacją techniczną sterowników,
2) wyszukać w internecie sterowniki PLC,
3) wypisać dane techniczne i sposoby ich instalowania,
4) zaprezentować wykonane ćwiczenie,
Wyposażenie stanowiska pracy:
−
dokumentacje techniczne sterowników,
−
komputer PC z dostępem do Internetu,
−
zeszyt,
−
przybory do pisania,
–
literatura wskazana przez nauczyciela.
Ćwiczenie 3
Wykonaj połączenia pomiędzy sterownikiem i urządzeniami zewnętrznymi na podstawie
schematu połączeń zacisków sterownika.
Rysunek do ćwiczenia 3

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przygotować stanowisko do pracy,
2) zapoznać się z przygotowaną dokumentacją techniczną sterownika,
3) wykonać wskazane połączenia,
4) zaprezentować wyniki swojej pracy.
Wyposażenie stanowiska pracy:
−
dokumentacja techniczna sterownika,
−
sterownik PLC,
−
schemat połączeń zacisków sterownika,
−
2 przyciski zwierne, 2 przyciski rozwierne,
−
2 lampki sygnalizacyjne,
−
katalogi elementów automatyki,
−
literatura wskazana przez nauczyciela.
4.5.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1) opisać budowę sterownika PLC?
2) określić wielkość i rodzaj pamięci sterownika, na podstawie dokumentacji
technicznej?
3) określić ilość i rodzaj wyjść sterownika, na podstawie dokumentacji
technicznej?
4) określić poziomy sygnałów wyjściowych sterownika, na podstawie
dokumentacji technicznej?
5) opisać budowę sieci sterownikowej?
6) zainstalować sterownik na szynie DIN?
7) wykonać połączenia pomiędzy sterownikiem i urządzeniami zewnętrznymi?
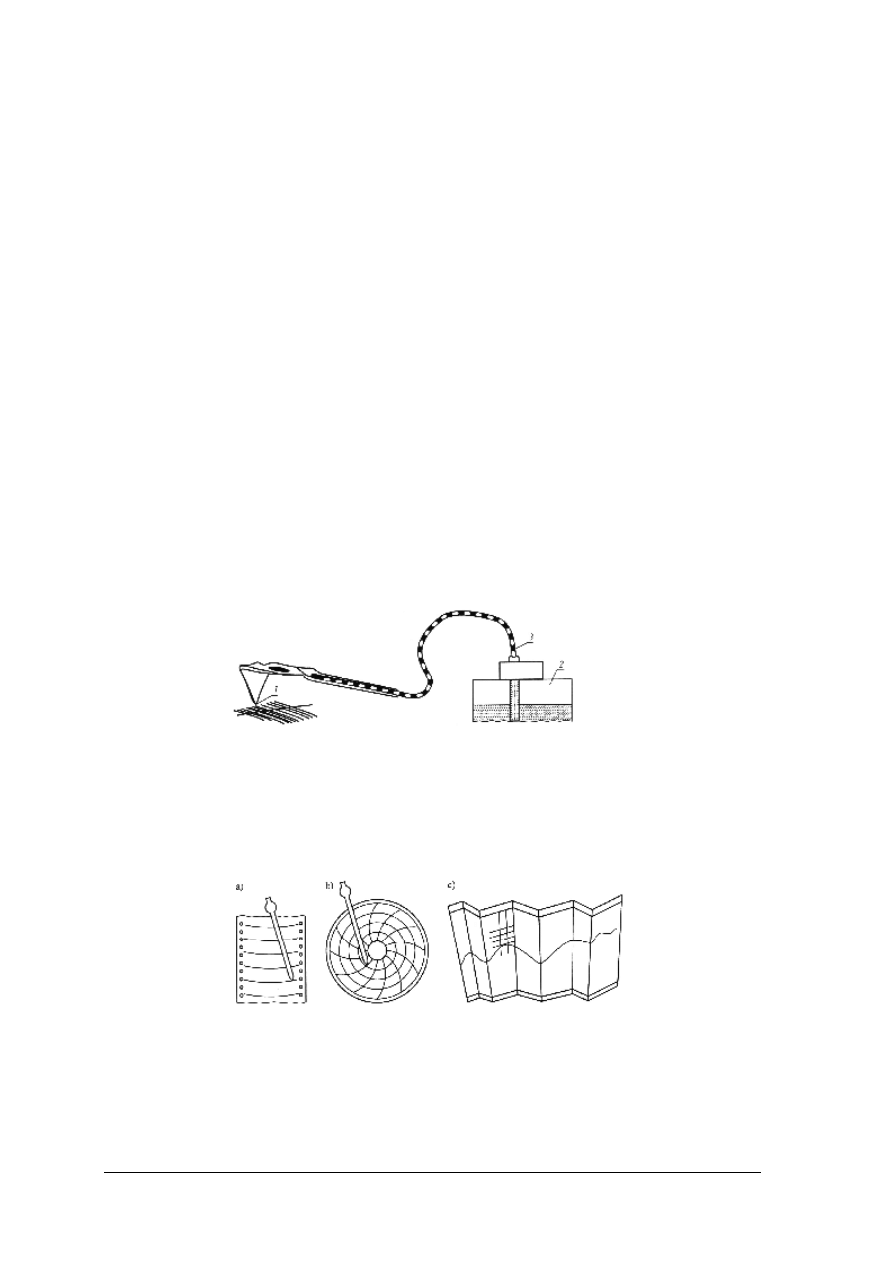
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
4.6. Urządzenia rejestrujące – budowa i zasada działania
4.6.1. Materiał nauczania
W przemyśle bardzo duże znaczenie ma automatyczna rejestracja wielkości
charakteryzujących przebieg procesu technologicznego. Na podstawie uzyskanych wykresów
obsługa jest informowana o zmianach rejestrowanych wielkości, można wykryć przyczynę
ewentualnej awarii, ocenić prawidłowość pracy obsługi. Do rejestracji wyników pomiarów
stosowana są metody: analogowa, cyfrowa i punktowa. W metodzie analogowej rejestracja
wyników pomiaru polega na wykonywaniu wykresu mierzonej wielkości w funkcji czasu.
W metodzie cyfrowej wielkość rejestrowana przetwarzana jest na ciąg liczb, również
w funkcji czasu. Dodatkowo mogą być drukowane inne wiadomości jako komentarz do
drukowanych liczb. W metodzie punktowej element rejestrujący stawia punkt odpowiadający
wartości wielkości mierzonej w stałych odstępach czasu.
Rejestratory analogowe zawierają mechanizm pomiarowy i mechanizm przesuwu
papieru. Zapis dokonywany jest najczęściej na papierze atramentem lub tuszem za pomocą
pisaka o specjalnej budowie. Pióro składa się z kapilary szklanej lub platynowo-irydowej
i zbiornika atramentu, który zamocowany jest na korpusie rejestratora i połączony z kapilarą
piszącą za pomocą elastycznej cieniutkiej rurki (rys 26). Przepływ atramentu odbywa się na
zasadzie naczyń włosowatych. W rejestratorach pneumatycznych pióro poruszane jest przez
mieszek sprężysty a w rejestratorach elektrycznych – przez cewkę poruszającą się w polu
magnetycznym. Atrament używany w rejestratorach nie może zasychać na piórze, a zarazem
na papierze powinien schnąć tak szybko, aby nie powodować rozmazywania wykresu.
Rys. 26. Schemat budowy pisaka rejestratora: 1 – pisak, 2 – zbiorniczek, 3 – rurka kapilarna [5, s. 131]
Nośnikiem zapisu w regulatorach stosowanych w automatyce najczęściej jest taśma lub
tarcza papierowa oraz papier składany w harmonijkę (rys. 27). Papier powinien być gładki,
nie może być higroskopijny (aby atrament się nie rozlewał a sam papier nie zmieniał
wymiarów przy zmianach wilgotności).
Rys. 27.
Rodzaje
nośników
zapisu:
a)
taśma
papierowa, b) tarcza papierowa, c) papier
składany w harmonijkę [5, s. 131]
Na rys. 28 przedstawiony jest schemat budowy mechanizmu przesuwu przy zapisie na
taśmie papierowej. Nośnik zapisu jest napędzany przez silnik synchroniczny 1, który przez
wielostopniową przekładnię 2 napędza rolkę ciągnącą 3 z występami (kołkami) wchodzącymi
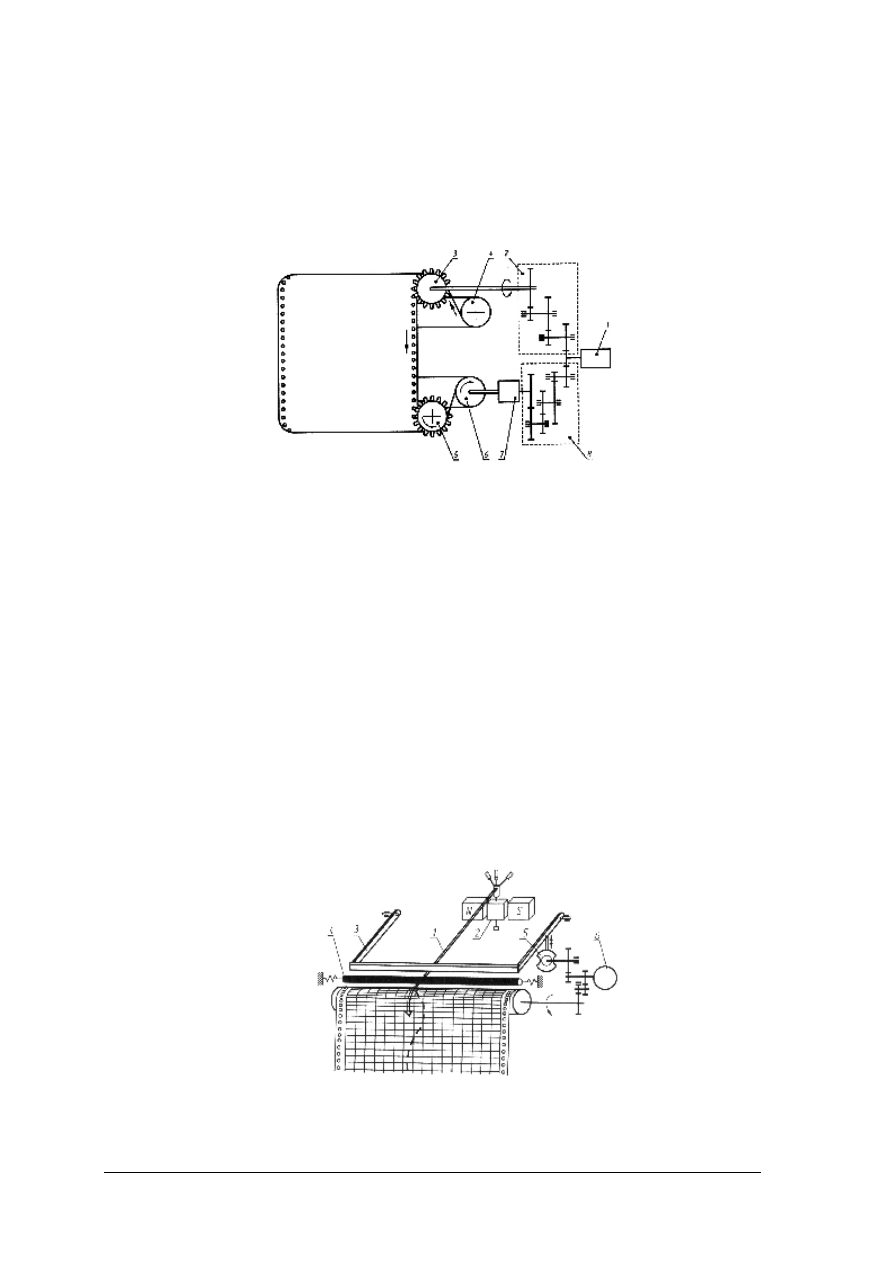
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
w dziurki znajdujące się na krawędzi taśmy. Rozwiązanie to zapewnia zgodność przesuwu
taśmy papierowej z prędkością obrotową rolki ciągnącej. Z rolki ciągnącej taśma papierowa
znajdująca się na rolce 4 luźno założonej na osi jest przewijana za pośrednictwem rolki
prowadzącej 5 na rolkę nawijającą 6. Rolka nawijająca 6 jest napędzana silnikiem
synchronicznym 1 poprzez przekładnię 8 i sprzęgło cierne 7. Sprzęgło to zapewnia stały
naciąg taśmy bez względu na zmieniającą się średnicę rolki nawijającej 6 z taśmą papierową.
Rys. 28.
Schemat blokowy przesuwu taśmy papierowej w rejestratorze: 1 – silnik synchroniczny,
2 – przekładnia zębata, 3 – rolka ciągnąca, 4 – rolka z zapasem taśmy papierowej,
5 – rolka prowadząca, 6 – rolka nawijająca, 7 – sprzęgło cierne, 8 – przekładnia zębata
[7, s. 250]
Zaletą zapisu tarczowego jest dobra widoczność całej nakreślonej krzywej (pełny obrót
tarczy trwa 8, 16 lub 24 godziny). Zaletą zapisu taśmowego jest możliwość ciągłej rejestracji
w dłuższym okresie czasu. Wadą tego zapisu jest konieczność wyjmowania rolki z nawiniętą
taśmą w celu zapoznania z zarejestrowanym przebiegiem. Czynność ta zakłóca pracę
rejestratora. Zastosowanie papieru składanego samoczynnie
na dole pojemnika
w harmonijkę ułatwia przeglądanie zarejestrowanych przebiegów bez konieczności
zakłócania pracy rejestratora.
W celu zmniejszenia liczby stosowanych rejestratorów jednokanałowych, w przypadku
konieczności porównywania wartości kilku parametrów budowane są rejestratory
wielokanałowe. W zależności od konstrukcji rejestratory mogą pracować w układzie bez
sprzężenia zwrotnego lub jako autokompensacyjne. Rejestratory autokompensacyjne
pozwalają na uzyskanie większych dokładności wartości zarejestrowanego parametru,
ponieważ pracują one w układzie zamkniętym (ze sprzężeniem zwrotnym), w którym
przebieg rejestrowany porównywany jest z przebiegiem wielkości wejściowej.
Rys. 29.
Schemat budowy rejestratora z opadającym pałąkiem: 1 – wskazówka,
2 – cewka, 3 – pałąk, 4 – taśma barwiąca, 5 – krzywka podnoszenia i opadania
pałąka, 6 – silnik synchroniczny [7, s. 255]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
Na rys. 29 przedstawiono przykład rejestratora z zapisem punktowym z opadającym
pałąkiem. Rejestratory tego typu są najczęściej wykonywane jako wielokanałowe
(wielopunktowe) do jednoczesnej rejestracji kilku różnych wartości.
Rejestratory jako urządzenia precyzyjne wymagają właściwej obsługi. Podczas ich
eksploatacji należy przestrzegać zaleceń producenta podanych w instrukcji obsługi.
Najczęściej obsługujący styka się z mechanizmem przesuwu papieru, samym papierem oraz
urządzeniem rejestrującym. Papier stosowany w rejestratorach powinien być odpowiedniego
rodzaju i jakości. Nie może być zabrudzony ani wilgotny. Mocując papier do rolki
nawijającej należy sprawdzić czy układa się on równolegle do osi rolki. Naciąg papieru
zależy od ustawienia sprzęgła ciernego, które może wymagać regulacji, ponieważ papier nie
może być naciągany zbyt mocno ani nawijany na rolce ciągnącej zbyt luźno. Elementy
rejestrujące wymagają stałej kontroli. W rejestratorach z opadającym pałąkiem wymagana
jest okresowa wymiana taśmy barwiącej, a w rejestratorach z piórem – regularne uzupełnianie
w zbiorniczku atramentu. Pisak wymaga częstego przepłukiwania letnią wodą lub spirytusem.
Mechanizmy ruchome należy okresowo smarować specjalnym olejem do mechanizmów
precyzyjnych.
Na rys. 30 przedstawiony jest mikroprocesorowy rejestrator z ekranem LCD pozwalający
na wizualizację, rejestrację i archiwizację parametrów procesów przemysłowych.
Wyposażony jest w kolorowy wyświetlacz o przekątnej 5,5”, wewnętrzną kartę pamięci oraz
system zapisu rejestrowanych parametrów na dyskietkę 3,5”. Rejestrator współpracuje
z programem komputerowym bezpośrednio w czasie rzeczywistym lub za pomocą danych
przenoszonych z dyskietki. Wyświetlacz LCD pozwala przedstawić rejestrowane dane
w różnych formach wizualizacji: emulacja taśmy papierowej, bar grafy, pola cyfrowe itp. Na
ekranie można obserwować dane zbierane na bieżąco oraz dane zapisane w pamięci
rejestratora. Wprowadzenie danych wejściowych rejestratora i ustawień programowych
można dokonać poprzez klawiaturę na rejestratorze lub za pośrednictwem interfejsu
z komputera. Rejestrator posiada uniwersalne wejście, dzięki czemu może współpracować
z wszystkimi rodzajami czujników termoparowych i termorezystancyjnych.
Rys. 30. Mikroprocesorowy rejestrator z ekranem LCD serii BR [16, s.175]
4.6.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie znasz metody rejestracji wyników pomiarów stosowane w rejestratorach?
2. Do czego mogą służyć zarejestrowane informacje?
3. Jak zbudowany jest pisak rejestratora?
4. Jakie zalety posiadają nośniki zapisu stosowane w rejestratorach?
5. W jaki sposób realizowany jest naciąg taśmy papierowej?
6. Jakie zalety posiadają rejestratory wielokanałowe?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
7. Jakie wymagania powinien spełniać papier stosowany na taśmy w rejestratorach?
8. Jakie możliwości techniczne posiada rejestrator mikroprocesorowy?
4.6.3. Ćwiczenia
Ćwiczenie 1
Zbadaj automatyczny rejestrator elektryczny.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przygotować stanowisko do pracy,
2) sprawdzić, czy rejestrator jest odłączony od sieci zasilającej,
3) otworzyć pokrywę rejestratora w celu zapoznania się z jego budową,
4) przygotować rejestrator do pracy,
5) założyć papier,
6) sprawdzić napełnienie banieczki tuszem,
7) oczyścić pióro,
8) uzupełnić w zbiorniczku zapas tuszu,
9) włączyć rejestrator do sieci zasilającej,
10) włączyć napęd papieru,
11) zmienić szybkość przesuwu papieru,
12) dołączyć do przewodów rejestratora napięcie elektryczne powodujące przesunięcie pióra
na środek podziałki,
13) zarejestrować skokowe zmiany tego napięcia,
14) powtórzyć pomiary ustalając mniejszą, a następnie większą wartość współczynnika
wzmocnienia wzmacniacza rejestratora,
15) zmierzyć minimalny czas przesuwu pióra rejestratora wzdłuż całej podziałki,
16) określić parametry statyczne i dynamiczne charakteryzujące rejestrator,
17) podać dane rejestratorów, które powinny być zamieszczone w katalogu przyrządów
pomiarowych,
18) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
−
automatyczny rejestrator elektryczny,
−
taśma papierowa,
−
tusz,
−
spirytus,
−
stoper,
−
sieć zasilająca,
−
źródło napięcia zasilającego przewody wejściowe rejestratora,
−
materiały i przybory do pisania,
−
literatura wskazana przez nauczyciela.
Ćwiczenie 2
Podaj zasadę działania, parametry techniczne rejestratorów oraz na podstawie kart
katalogowych i instrukcji określ wymagania eksploatacyjne badanych rejestratorów.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przygotować stanowisko pracy do wykonania ćwiczenia,
2) określić typ rejestratora,
3) podać nazwę producenta,
4) odczytać zakresy pomiarowe oraz klasę dokładności,
5) wskazać gdzie mogą być stosowane,
6) podać wymagania eksploatacyjne badanych rejestratorów,
7) zaprezentować efekty swojej pracy.
Wyposażenie stanowiska pracy:
–
rejestratory,
–
regulatory z wbudowanymi rejestratorami,
–
karty katalogowe,
–
instrukcje obsługi,
–
zeszyt,
–
przybory do pisania,
–
literatura wskazana przez nauczyciela.
4.6.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) założyć rolkę z papierem do rejestratora?
2) uzupełnić zapas tuszu w zbiorniczku i przeczyścić pióro?
3) zmierzyć minimalny czas przesuwu pióra wzdłuż całej podziałki?
4) określić parametry statyczne i dynamiczne badanego rejestratora?
5) dobrać rejestrator do zadanych warunków pomiaru?
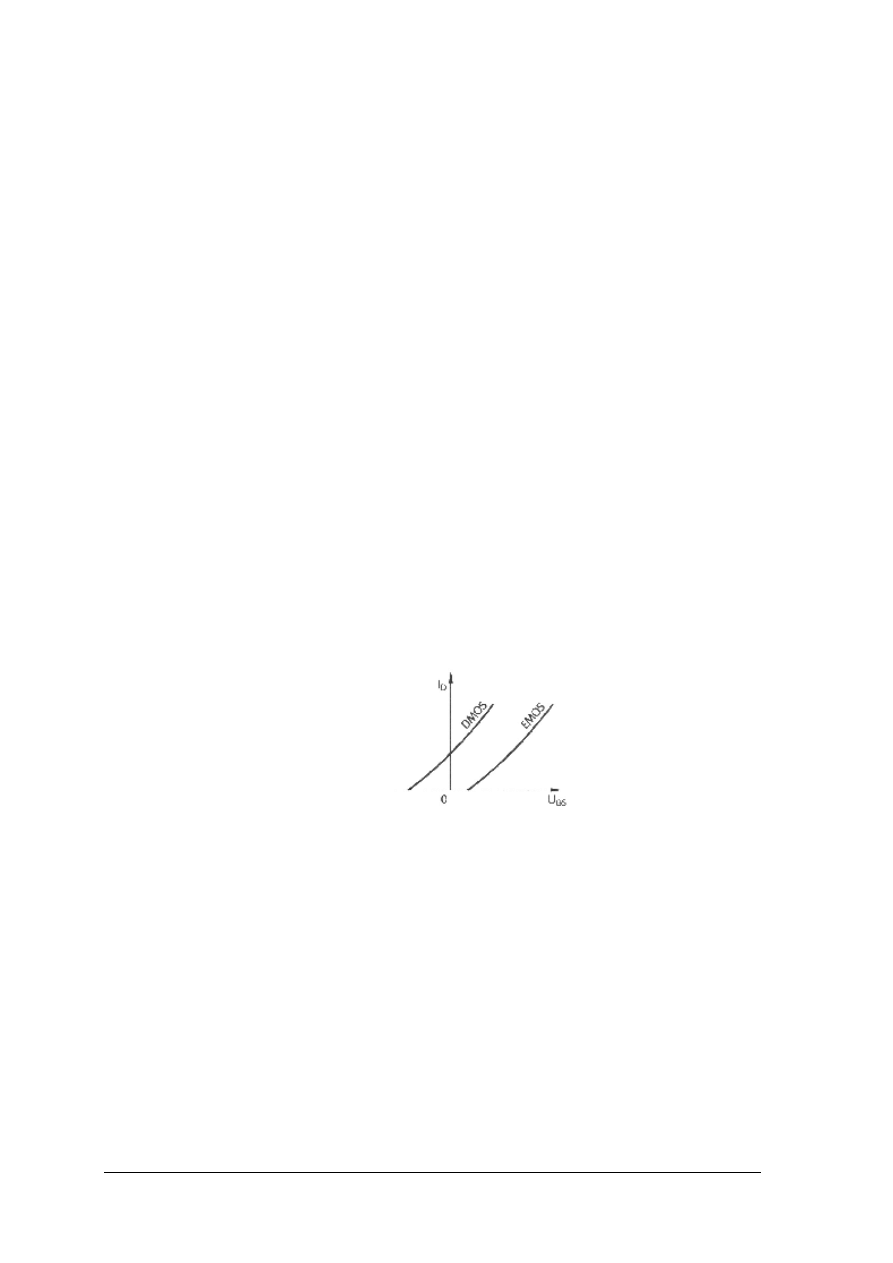
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
4.7. Elementy przełączające – budowa i zasada działania
4.7.1. Materiał nauczania
Półprzewodnikowe elementy załączające
W układach elektrycznych w zakresie małych i średnich wartości napięć i prądów
funkcje przełączające pełnią elementy półprzewodnikowe, zwane popularnie kluczami.
Pracują w dwóch stanach: dużej rezystancji(element zablokowany – klucz rozwarty) i małej
rezystancji (element przewodzi – klucz zwarty). Funkcje przełączników mogą pełnić
tranzystory bipolarne, unipolarne, tyrystory. Przełączniki półprzewodnikowe używa się do
budowy
multiplekserów,
demultiplekserów,
układów
próbkująco-pamiętających,
przetworników a/c i c/a, w układach sterowania silników.
Przełączniki z tranzystorami polowymi
Elementami przełączników scalonych mogą być tranzystory polowe FET, w których
sterowanie prądem płynącym przez tranzystor odbywa się za pomocą oddziaływania pola
elektrycznego na półprzewodnik. Tranzystory polowe dzielimy na złączowe (PNFET)
i z izolowaną bramką (MOS). W tranzystorach z izolowaną bramką występuje w pobliżu
warstwy izolacyjnej kanał przewodzący między źródłem a drenem. Tranzystory MOS dzieli
się na dwie grupy (rys.31):
−
z kanałem zubożanym (DMOS), jeśli kanał między drenem i źródłem istnieje bez
polaryzacji bramki – żeby kanał zamknąć należy doprowadzić do elektrod napięcie
odcięcia,
−
z kanałem wzbogacanym (EMOS), jeśli w zwykłych warunkach kanał nie istnieje –
pojawia się po spolaryzowaniu bramki odpowiednim napięciem.
Rys. 31. Charakterystyki tranzystorów MOS jako elementów przełączających [4, s. 78]
Dzięki możliwości sterowania kanałem dwuwartościowo tak, aby punkt pracy znajdował
się raz po jednej raz po drugiej stronie punktu odcięcia prądu na charakterystyce, możemy
wykorzystać tranzystor MOS jako klucz przełączający. Klucz ten charakteryzuje się małą
rezystancją zastępczą w stanie przewodzenia i bardzo dużą w stanie odcięcia. W układzie
przełączającym elementy MOS zachowują się jak sterowane, dwustawne rezystory. Układy
z elementami MOS szczególnie nadają się do scalania (przykład – układ scalony 4066
zawierający w jednej obudowie cztery bilateralne przełączniki analogowe sterowane
indywidualnie cyfrowo – rys. 32).
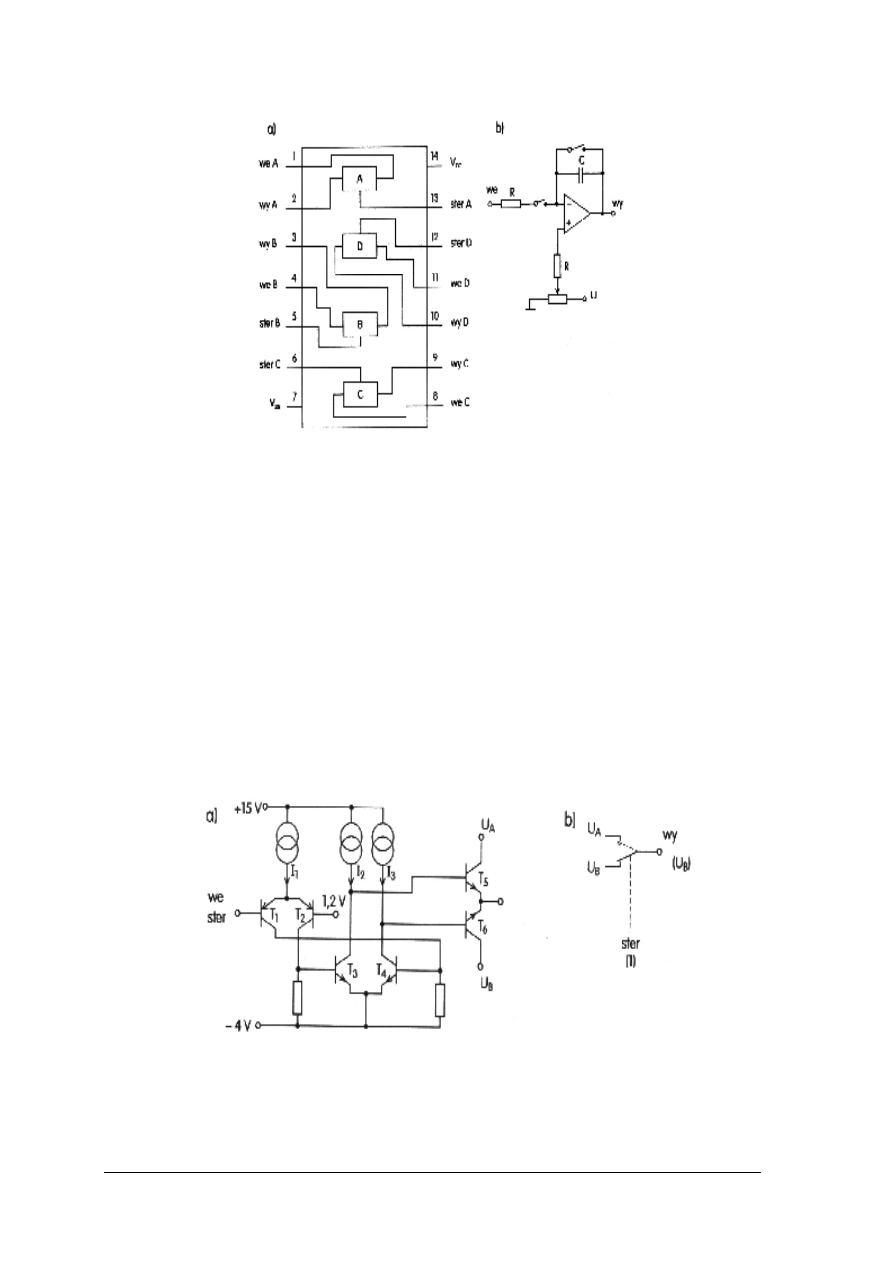
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
Rys. 32. Poczwórny przełącznik 4066: a) wersja scalona; b) przykładowy sposób
jego użycia [4, s. 79]
Przełączniki z tranzystorami bipolarnymi
Przełączniki z tranzystorami bipolarnymi mogą być zarówno w wersji monolitycznej, jak
i scalonej. Przedstawiony na rys. 33 przełącznik bipolarny jest częścią monolitycznego
poczwórnego przełącznika AD555, ze stykami przełącznymi, sterowanego sygnałem TTL.
Para tranzystorów przełączających T
5
i T
6
może przewodzić prąd w obydwu kierunkach.
Jest ona dołączona do napięć odniesienia U
B
i U
A
nie przekraczających ± 4V względem masy.
Układ sterujący tworzą pary tranzystorów T
1
, T
2
i T
3
, T
4
ze źródłami prądowymi
o wydajności ok. 300 μA. Napięcie 1,2 V na bazie tranzystora T
2
pochodzi z wewnętrznego
dzielnika. Jeśli na wejściu będzie stan 1, to tranzystor T
1
zostanie odcięty, a tranzystor T
2
i wysterowany przez niego T
3
będą przewodziły, spowoduje to wyłączenie tranzystora T
5
i nasycenie prądem I
3
tranzystora T
6
, który przełącza napięcie T
2
na wyjście. Jest to
przełącznik małej mocy. Przy sterowaniu silników należałoby zastosować tranzystory
bipolarne mocy.
Rys. 33. Przełącznik bipolarny: a) schemat; b) oznaczenie [4, s. 80]
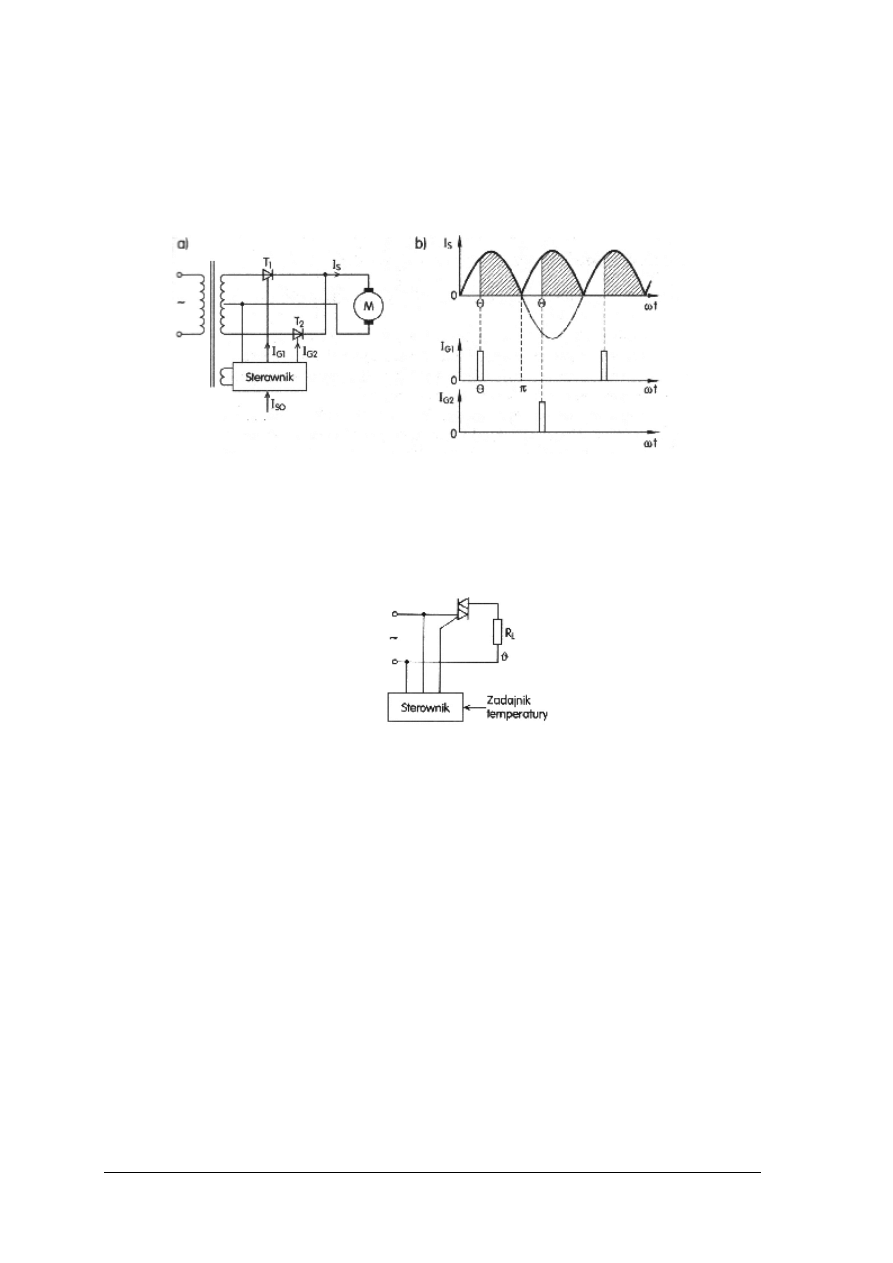
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
Przełączniki tyrystorowe
Tyrystory stosuje się w układach zasilania odbiorników prądu stałego (np. silników)
ze źródła napięcia przemiennego kiedy wymagane jest sterowanie wartością skuteczną prądu.
Takie sterowanie przedstawia rys. 34. Sterownik generuje impulsy I
G1
, I
G2
załączające
tyrystory, przesunięte w fazie o kąt Θ (0
≤
Θ
≤
π) względem napięcia zasilającego.
Rys. 34.
Wykorzystanie tyrystorów; a) schemat; b) przebiegi sygnałów [4, s. 83]
Tyrystor dwukierunkowy – triak (rys. 35) może być wykorzystany do zasilania ze źródła
napięcia przemiennego odbiorników, takich jak urządzenia grzejne i oświetleniowe, które nie
wymagają prądu jednokierunkowego, tylko sterowania jego wartością skuteczną.
Rys. 35. Sposób wykorzystania triaka [4, s. 83]
4.7.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie elementy w układach elektrycznych w zakresie małych i średnich mocy pełnią
funkcje przełączające?
2. Jakie elementy mogą pełnić funkcję przełączników półprzewodnikowych?
3. Dlaczego można wykorzystać tranzystor MOS jako klucz przełączający?
4. Jaka jest zasada działania bipolarnego przełącznika?
5. Do czego mogą być wykorzystane triaki?
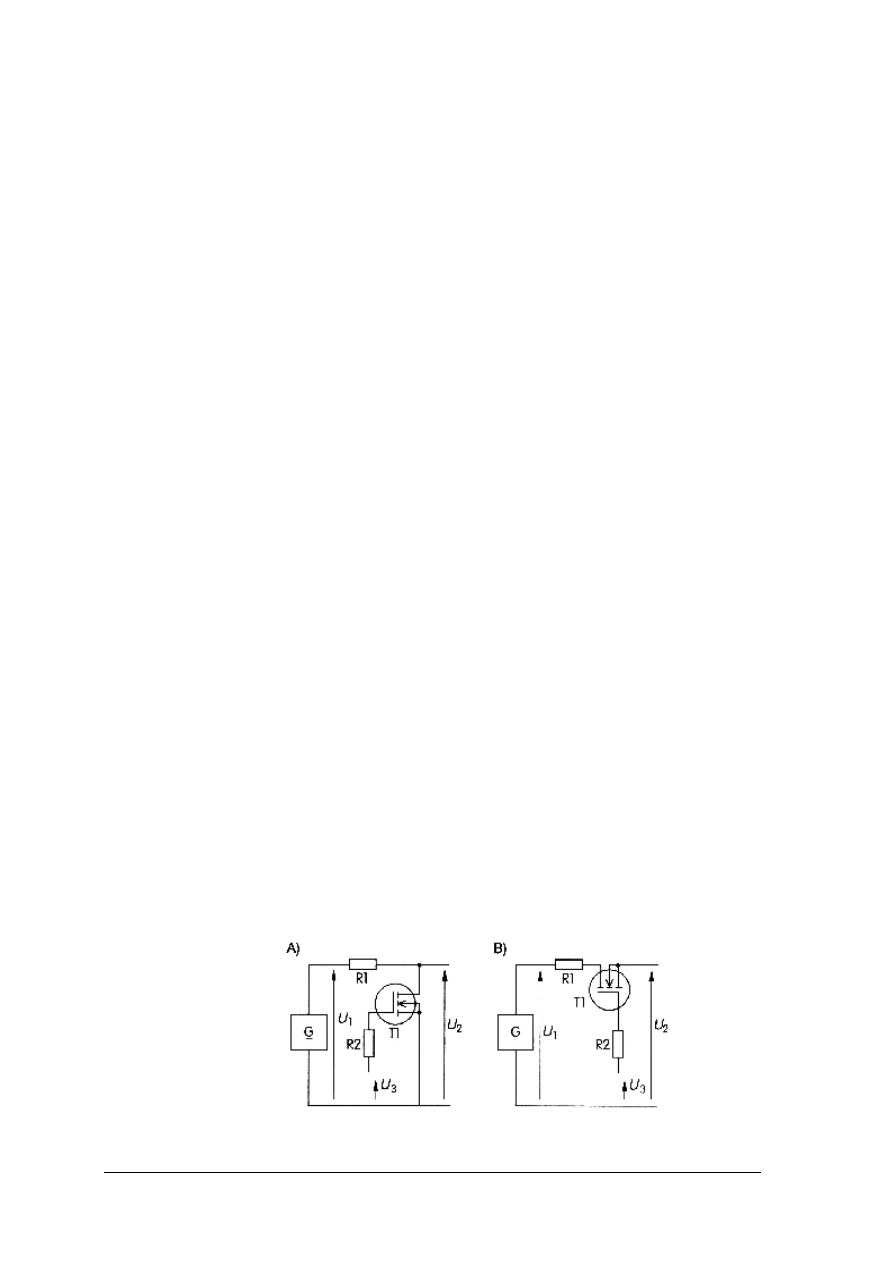
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
4.7.3. Ćwiczenia
Ćwiczenie 1
Zapoznaj się z działaniem bezstykowych elementów przełączających.
Sposób wykonania ćwiczenia:
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z materiałem dotyczącym bezstykowych elementów przełączających,
2) przygotować stanowisko pracy,
3) wyszukać w katalogu dane użytkowe badanych elementów,
4) zanotować parametry badanych elementów,
5) zaproponować układ do sprawdzenia niektórych parametrów badanych elementów,
6) zapoznać się ze schematami i budową układów zasilania zawierających tyrystory i triaki,
7) zaobserwować na ekranie oscyloskopu przebiegi napięć w wybranych punkach układów
zasilania,
8) narysować te przebiegi,
9) wyznaczyć charakterystykę sterowania jako zależność prądu w odbiorniku w funkcji
położenia nastawnika kąta załączenia tyrystora,
10) porównać wyniki z danymi katalogowymi,
11) zaprezentować wynik swojej pracy.
Wyposażenie stanowiska pracy:
−
zestaw elementów przełączających,
−
nastawniki kąta załączania tyrystorów i triaków,
−
rezystory regulowane,
−
generator,
−
oscyloskop dwukanałowy,
−
woltomierz cyfrowy,
−
autotransformator,
−
katalogi elementów,
−
instrukcja obsługi oscyloskopu,
−
przybory do pisania i rysowania, papier,
−
literatura wskazana przez nauczyciela.
Ćwiczenie 2
Na rysunku przedstawione są schematy łączników elektronicznych z tranzystorami
polowymi. Opisz zasadę działania układów.
Rysunek do ćwiczenia 2

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z materiałem dotyczącym zasady działania łączników elektronicznych,
2) zorganizować stanowisko pracy,
3) przeanalizować działanie przedstawionych układów,
4) opisać działanie układów,
5) zaprezentować efekty swojej pracy.
Wyposażenie stanowiska pracy:
−
zeszyt,
−
przybory do pisania i rysowania,
−
literatura wskazana przez nauczyciela.
4.7.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
odszukać w katalogu podstawowe dane użytkowe bezstykowych
elementów przełączających?
2)
podać parametry charakteryzujące stan dynamiczny tranzystora
polowego?
3)
omówić procesy załączania i wyłączania tranzystora bipolarnego?
4)
wyjaśnić co to jest obszar bezpiecznej pracy tranzystora?
5)
wyznaczyć napięcie progowe tranzystora polowego?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
4.8. Przetworniki elektrooptyczne – budowa i zasada działania
4.8.1. Materiał nauczania
Elementami optoelektronicznymi nazywamy elementy elektryczne wykorzystujące fale
świetlne
od
podczerwieni
do
ultrafioletu.
Półprzewodnikowymi
elementami
optoelektronicznymi są:
−
elementy przetwarzające fale świetlne na sygnały elektryczne, np., fotorezystory,
fotodiody, fototranzystory, przetworniki obrazu CCD i APS,
−
elementy emitujące światło, czyli przetwarzające prąd elektryczny w fale świetlne, np.
diody LED, diody laserowe, kineskopy, wyświetlacze, moduły wyświetlaczy.
Czujniki optoelektroniczne znalazły zastosowanie w automatyce. Działają na zasadzie
wysyłania wiązki promieni świetlnych przez nadajnik i ich odbieraniu przez odbiornik.
Czujniki te reagują na obiekty znajdujące się na drodze rozchodzenia się wiązki światła.
Zaletą czujników są duże zasięgi działania uzyskiwane dla małych obudów czujników.
Wykorzystuje się m.in. do kontroli położenia ruchomych części maszyn, do identyfikacji
obiektów znajdujących się w zasięgu działania czujników, np. przesuwających się po taśmach
transportowych, do określania poziomu cieczy i materiałów sypkich. W większości czujniki
wykorzystują modulowane światło z zakresu bliskiej podczerwieni (źródłem światła jest
dioda LED podczerwień). Zaletą ich jest mała wrażliwość na światło widzialne z otoczenia,
duża odporność na zakłócenia oraz możliwość pracy w warunkach zanieczyszczenia
powietrza i przy zabrudzeniu układu optycznego czujnika. Zanieczyszczone powietrze
i zabrudzony układ optyczny skracają jednak strefę działania czujnika
Czujniki optyczne możemy podzielić na następujące rodzaje:
−
czujniki optyczne odbiciowe TOO,
−
czujniki optyczne refleksyjne TOR,
−
jednowiązkowe bariery świetlne TOB.
W czujnikach optycznych odbiciowych (rys. 36 a) nadajnik i odbiornik umieszczone są
we wspólnej obudowie. Reagują na obiekty wprowadzone w strefę działania czujnika.
Wiązka promieni świetlnych emitowana z nadajnika po odbiciu się od przeszkody znajdującej
się na jej drodze, odbija się od niej. Pozostała część dociera do odbiornika, gdzie po
wzmocnieniu służą do wytworzenia sygnału przełączającego wyjście czujnika.
W czujnikach optycznych refleksyjnych (rys. 36 b) nadajnik i odbiornik umieszczone są
również we wspólnej obudowie, skierowane w końcowy punkt zasięgu, w którym
umieszczono specjalny reflektor odblaskowy. Przesłonięcie przez obiekt wiązki promieni
świetlnych powoduje przerwanie transmisji i przełączenie obwodu wyjściowego czujnika.
W jednowiązkowych barierach świetlnych (rys. 36 c) odbiornik i nadajnik umieszczone
są w oddzielnych obudowach. Każdy obiekt, który znajdzie się na drodze wiązki promieni
świetlnych, przerywa transmisję i przełącza obwody wyjściowe czujnika.
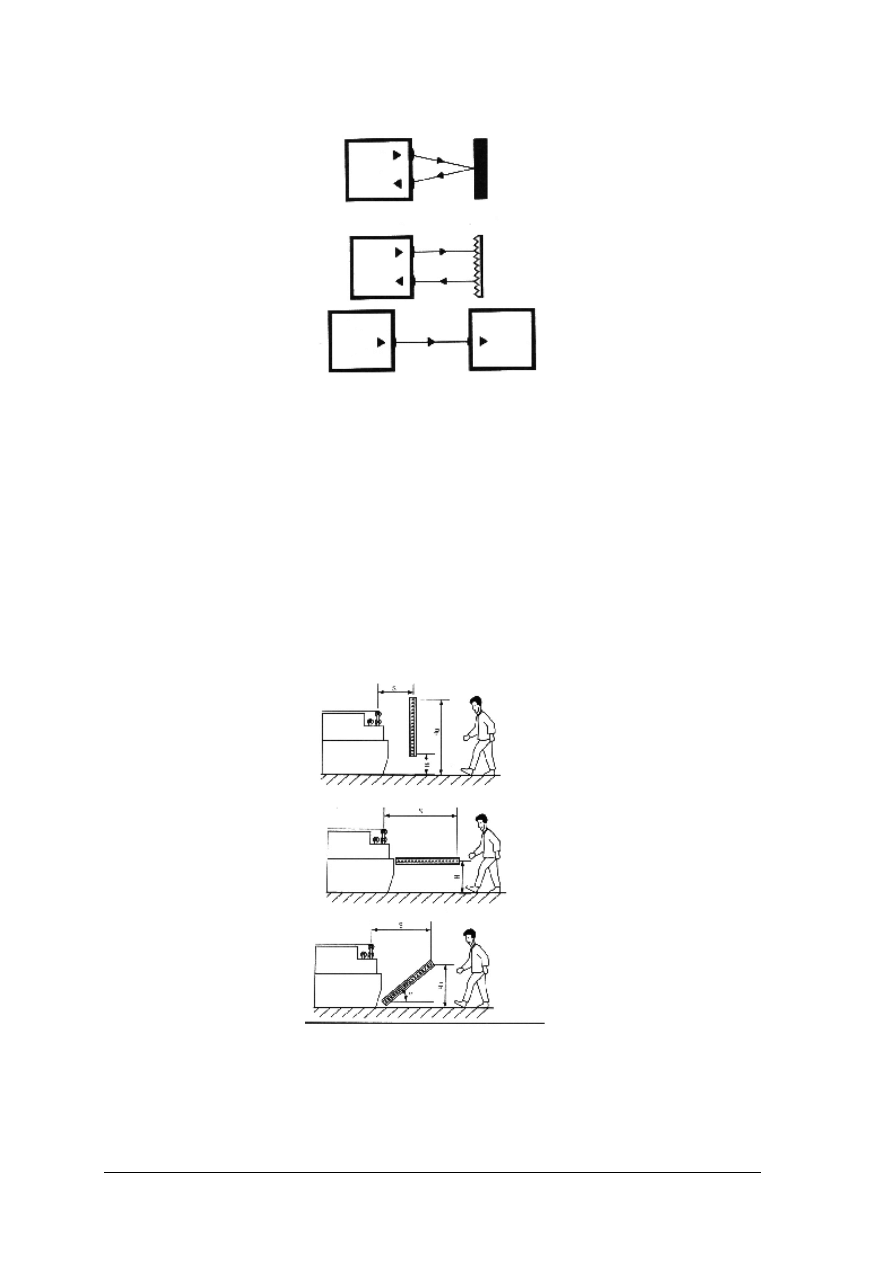
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
54
a)
b)
c)
Rys. 36. Zasada
działania
czujników
optycznych:
a) odbiciowego, b) refleksyjnego, c) jednowiązkowej
bariery świetlnej [16, s. 60]
Czujniki optoelektroniczne są podstawą systemu przemysłowych barier ochronnych.
Każdy system składa się z nadajnika i odbiornika, profilu gumowego zamontowanego
w listwie aluminiowej oraz jednostki sterującej. Czujniki używają pulsującego światła
podczerwonego. Jeżeli promień światła jest osłabiony lub przewód połączenia elektrycznego
zostanie uszkodzony lub przerwany, jednostka sterująca odetnie zasilanie od przekaźników
wyjściowych. Listwa bezpieczeństwa może zabezpieczać długość od 0,4 m do 10 m. Listwa
jest stosowana w celu zabezpieczenia ludzi przed uszkodzeniem przez ruchome części, np.
drzwi przemysłowe, osłony i drzwi maszyn, pojazdy sterowane automatycznie, podesty
ruchome i platformy dźwigowe, automatyczne systemy transportowe, roboty, systemy
podawania materiałów itp. Na rys. 37 pokazano przykłady montażu listwy bezpieczeństwa.
Rys. 37. Przykładowe sposoby montażu listwy bezpieczeństwa [15, s. 289]
Na rys. 38 przedstawiono optyczny sensor płożenia, w którym wykorzystano fotoelement
np. fotodiodę. Kiedy strumień światła pada na fotodiodę, wytwarza ona sygnał napięciowy
o wartości zależnej od miejsca padania strumienia. Dzięki zastosowaniu tego sensora oraz
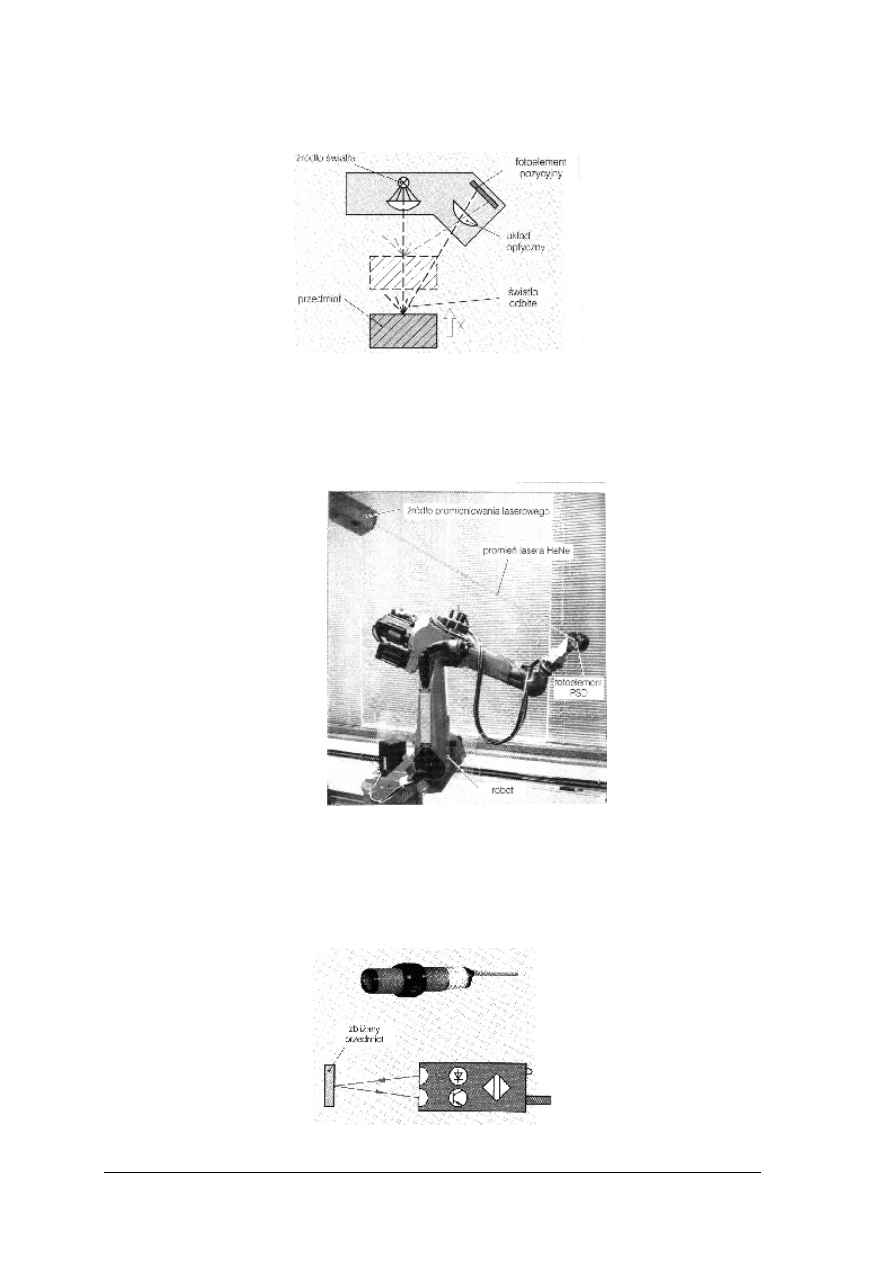
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
55
metodzie triangulacji można bardzo dokładnie, bezdotykowo wyznaczyć odległość do
przedmiotów.
Rys. 38. Optyczny sensor położenia [12, s. 194]
Przy pomocy półprzewodnikowych, fotoczułych płytek, np. kwadratowych o długości
krawędzi 15 mm, można wykonać optyczny pomiar odchyłki położenia. Płytkę mocuje się na
saniach obrabiarki lub robocie (rys. 39), następnie kierując na środek płytki cienki promień
lasera, można wyznaczyć odchyłkę trajektorii ruchu – wzdłuż promienia lasera – mierzoną
prostopadle do jego osi.
Rys. 39.
Wyznaczanie dokładności ruchu robota wzdłuż linii prostej za pomocą fotoelementu [12, s. 194]
Optyczne sensory zbliżeniowe pracują jako sensory refleksyjne (rys. 40). W przypadku
zbliżenia się przedmiotu wyemitowane przez diodę nadawczą pulsujące promieniowanie
podczerwone, odbija się od niego i jest odbierane przez fototranzystor. Wykorzystując
sensory optyczne w bardzo małych urządzeniach, np. w mikronapędach, promieniowanie
wysyłane i odbierane przesyłane jest cienkimi, giętkimi przewodami światłowodowymi.
Rys. 40.
Optyczny sensor zbliżeniowy [12, s. 202]
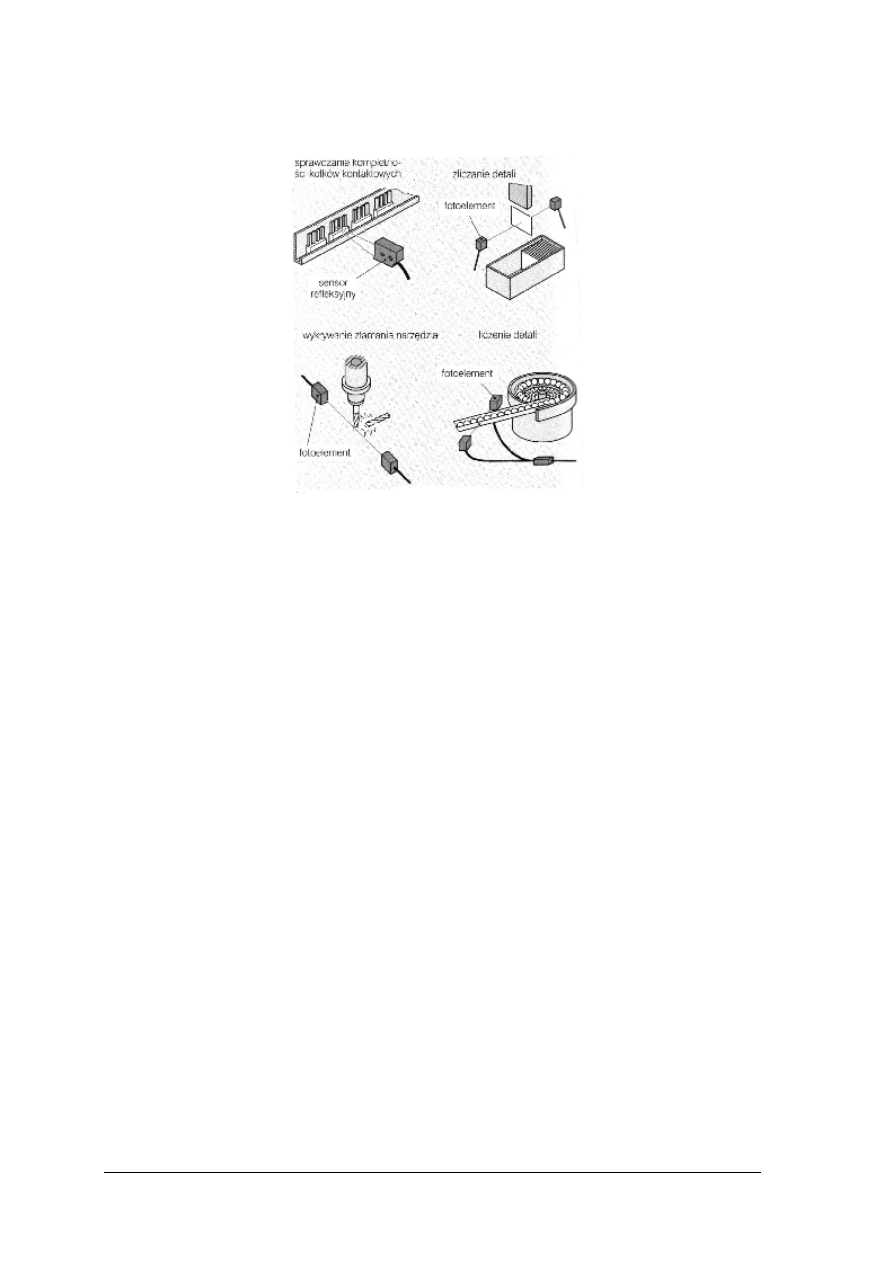
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
56
Na rys. 41 pokazano sposoby wykorzystania optycznych sensorów zbliżeniowych
w urządzeniach transportowych i na stanowiskach montażowych.
Rys. 41.
Przykłady zastosowania optycznych sensorów zbliżeniowych [12, s. 202]
4.8.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie elementy nazywamy elementami optoelektronicznymi?
2. Jaka jest podstawowa różnica w działaniu diody LED i fotodiody?
3. Gdzie znalazły zastosowanie czujniki optoelektroniczne?
4. Jakie zalety posiadają czujniki optoelektroniczne?
5. Jaka jest zasada działania czujników optycznych odbiciowych, a jaka czujników
refleksyjnych?
6. Gdzie stosuje się listwy bezpieczeństwa?
7. Jaka jest zasada działania optycznego sensora zbliżeniowego?
4.8.3. Ćwiczenia
Ćwiczenie 1
Spośród podanych czujników wybierz czujniki optoelektroniczne. Na podstawie
oznaczeń określ ich typy. Odnajdź w Internecie notę katalogową każdego czujnika i odczytaj
parametry oraz zastosowanie czujnika. Odszukaj sklepy Internetowe oferujące czujniki
optoelektroniczne, porównaj ich ceny.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) wybrać czujniki optoelektroniczne spośród wszystkich dostępnych czujników,
2) odczytać typ każdego z nich,
3) odnaleźć w internecie kartę katalogową czujnika optoelektronicznego,
4) odczytać parametry poszczególnych czujników oraz ich zastosowanie,
5) porównać ceny czujników,
6) zaprezentować wykonane ćwiczenie.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
57
Wyposażenie stanowiska pracy:
–
różne typy czujników, w tym czujniki optoelektroniczne różnych typów,
–
komputer PC z dostępem do Internetu,
–
oprogramowanie umożliwiające przeglądanie dokumentacji w postaci plików PDF,
–
materiały i przybory do pisania
–
literatura wskazana przez nauczyciela.
Ćwiczenie 2
Na podstawie zadanego schematu układu do wyznaczania charakterystyk prądowo–
napięciowych i oświetleniowych wykonaj badanie fototranzystora.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z materiałem teoretycznym o elementach optoelektronicznych,
2) zorganizować stanowisko pracy do wykonania ćwiczenia,
3) zapoznać się z elementami składowymi układu do badania fototranzystora,
4) zaznajomić się z danymi katalogowymi badanego fototranzystora,
5) zanotować najważniejsze dane katalogowe fototranzystora,
6) zmontować układ pomiarowy zgodnie z podanym schematem,
7) zgłosić gotowość wykonania ćwiczenia prowadzącemu,
8) przystąpić, po sprawdzeniu poprawności projektu i połączeń przez nauczyciela oraz
otrzymaniu zezwolenia, do wykonywania pomiarów,
9) wyznaczyć charakterystyki prądowo-napięciowe fototranzystora,
10) wyznaczyć charakterystykę oświetleniową fototranzystora,
11) wykreślić zdjęte charakterystyki,
12) omówić przebiegi otrzymanych charakterystyk,
13) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
–
fototranzystor,
–
ogniwo fotoelektryczne,
–
woltomierz elektroniczny,
–
luksomierz,
–
zasilacz stabilizowany,
–
materiały i przybory do pisania,
–
literatura wskazana przez nauczyciela.
4.8.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) rozpoznać czujniki optoelektroniczne?
2) odszukać na podstawie oznaczeń karty katalogowe badanych czujników?
3) porównać parametry czujników w powiązaniu z ich ceną?
4) wyznaczyć charakterystyki prądowo-napięciowe fotoelementu?
5) wyznaczyć charakterystykę oświetleniową fotoelementu?
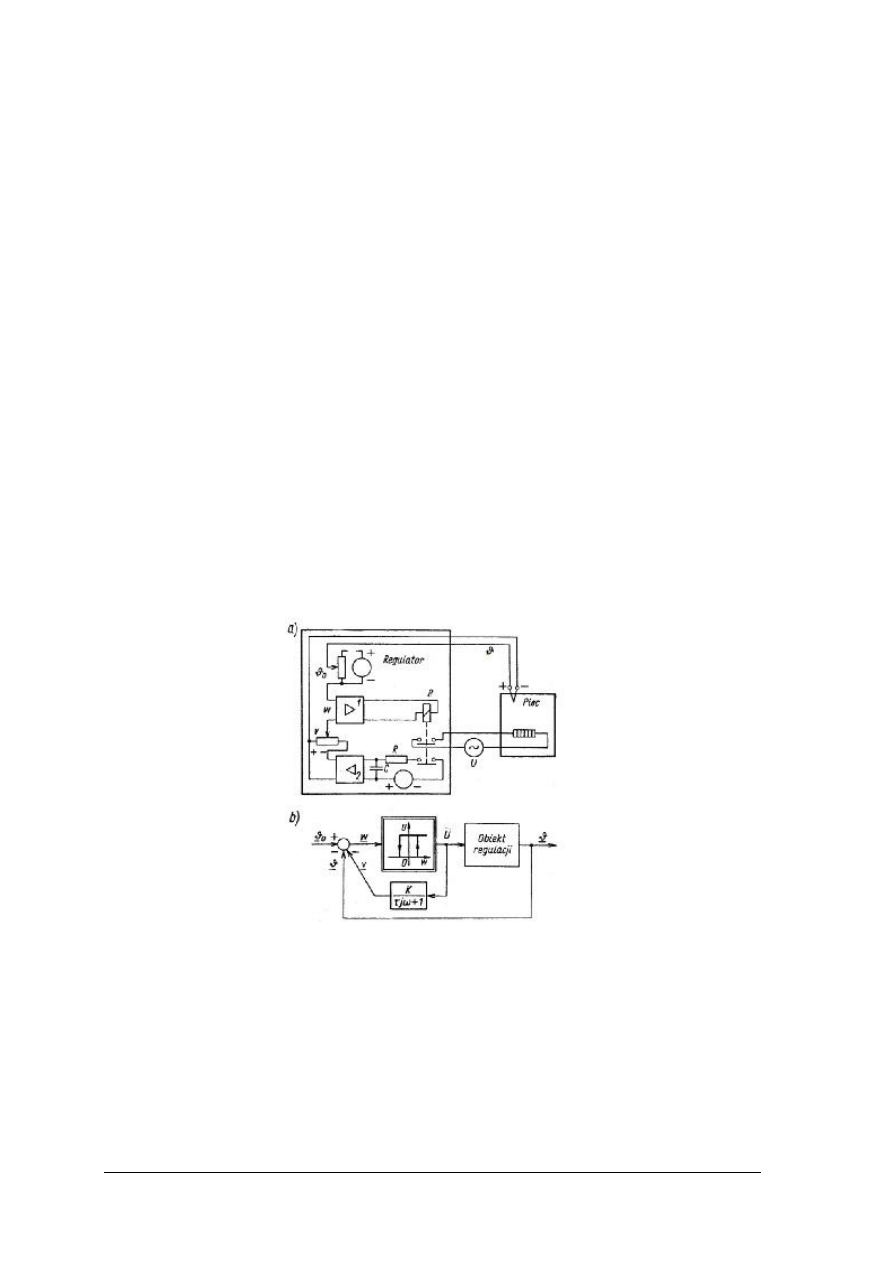
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
58
4.9. Układy regulacji wielkości nieelektrycznych (temperatura,
ciśnienie, przepływ) – budowa i zasada działania
4.9.1. Materiał nauczania
Układy regulacji temperatury należą do najczęściej spotykanych w przemyśle. Typowe
obiekty regulacji to: wymienniki ciepła, reaktory chemiczne, piece gazowe i elektryczne,
urządzenia klimatyzacyjne, suszarnie itd.
Na rys. 42 przedstawiono schemat układu regulacji temperatury w piecu
z zastosowaniem regulatora dwustawnego z pomocniczym sprzężeniem zwrotnym.
Jeśli, na wejściu wzmacniacza 1 suma sygnałów:
ϑ
– sygnału z termoelementu
(temperatura mierzona),
0
ϑ
– sygnału wartości zadanej oraz
υ
– sygnału ujemnego
sprzężenia zwrotnego przekroczy określoną wartość
υ
−
ϑ
−
ϑ
=
0
w
,
to zadziała przekaźnik P, który przez styki włącza napięcie U zasilające grzejnik oraz obwód
ładowania kondensatora C przez rezystor R. Dzięki sprzężeniu zwrotnemu układ powoduje
włączenie z wyprzedzeniem przekaźnika P. W ten sposób nie dochodzi do zbyt dużych
przeregulowań wielkości regulowanej. Po wyłączeniu przekaźnika maleje temperatura
ϑ
i zmniejsza się sygnał
υ
sprzężenia zwrotnego ujemnego, bowiem kondensator C rozładowuje
się przez rezystancję wejściową wzmacniacza pomocniczego 2.
Rys. 42. Układ regulacji temperatury z regulatorem dwustawnym z ujemnym sprzężeniem
zwrotnym: a) schemat układu, b) schemat blokowy [15, s. 197]
Gdy suma sygnałów
υ
+
ϑ
dostatecznie zmaleje, ponownie zadziała przekaźnik P i cykl
pracy układu powtarza się.
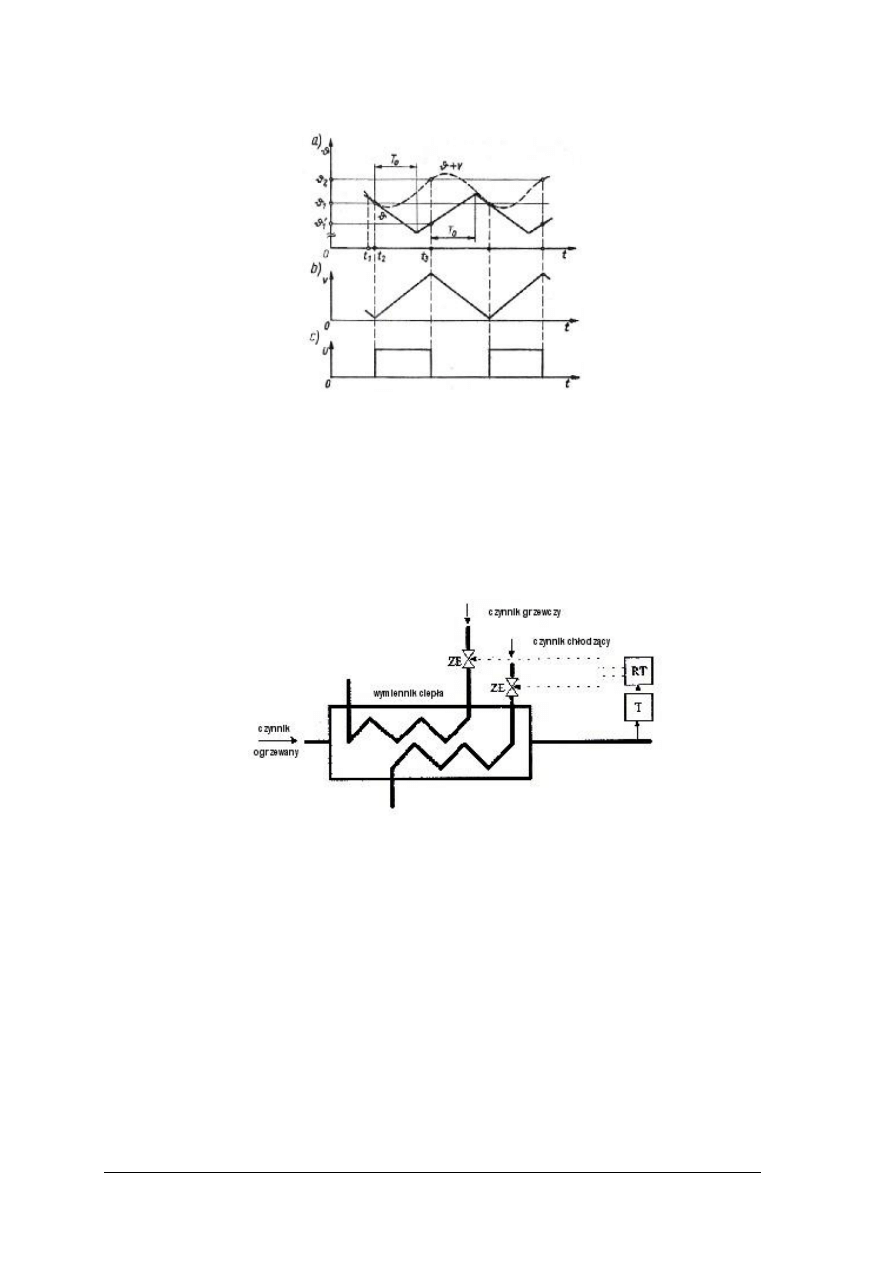
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
59
Rys. 43.
Zmiany wielkości regulowanej w układzie regulacji dwustawnej: a) wykresy
( )
t
ϑ
oraz
( ) ( )
t
t
υ
+
ϑ
; b) sygnał sprzężenia zwrotnego
( )
t
υ
; c) napięcie zasilające
grzejnik [15, s. 198]
Rys. 43 przedstawia wykresy czasowe działania układu zobrazowanego na rys. 42.
Gdyby nie było sprzężenia zwrotnego w układzie, przełączanie napięcia U występowałyby
przy sygnałach
ϑ
osiągających wartości
2
ϑ
oraz
1
ϑ
. Zastosowanie ujemnego sprzężenia
zwrotnego, powoduje że regulator włącza napięcie U z wyprzedzeniem.
Rys. 44. Układ
trójpołożeniowej
regulacji
temperatury:
ZE
–
zawór
elektromagnetyczny, T – przetwornik pomiarowy temperatury, RT – regulator
temperatury
Rys. 44 przedstawia regulację temperatury w wymienniku ciepła z regulatorem
trójstawnym. Temperatura wody na wlocie do wymiennika ciepła może być w pewnych
przypadkach czasu wyższa od wartości zadanej. Potrzebne jest więc w tych przedziałach
czasu chłodzenie wody. Wielkość sterująca czyli ilość energii cieplnej dopływającej do
wymiennika, może przyjąć trzy wartości: grzanie – wyłączenie – chłodzenie.
Inne rozwiązanie, regulacji temperatury, z zastosowaniem regulatora krokowego
przedstawiono na rys. 45. Elementem wykonującym funkcje: załącz w prawo – stop – załącz
w lewo, realizuje serwomechanizm.
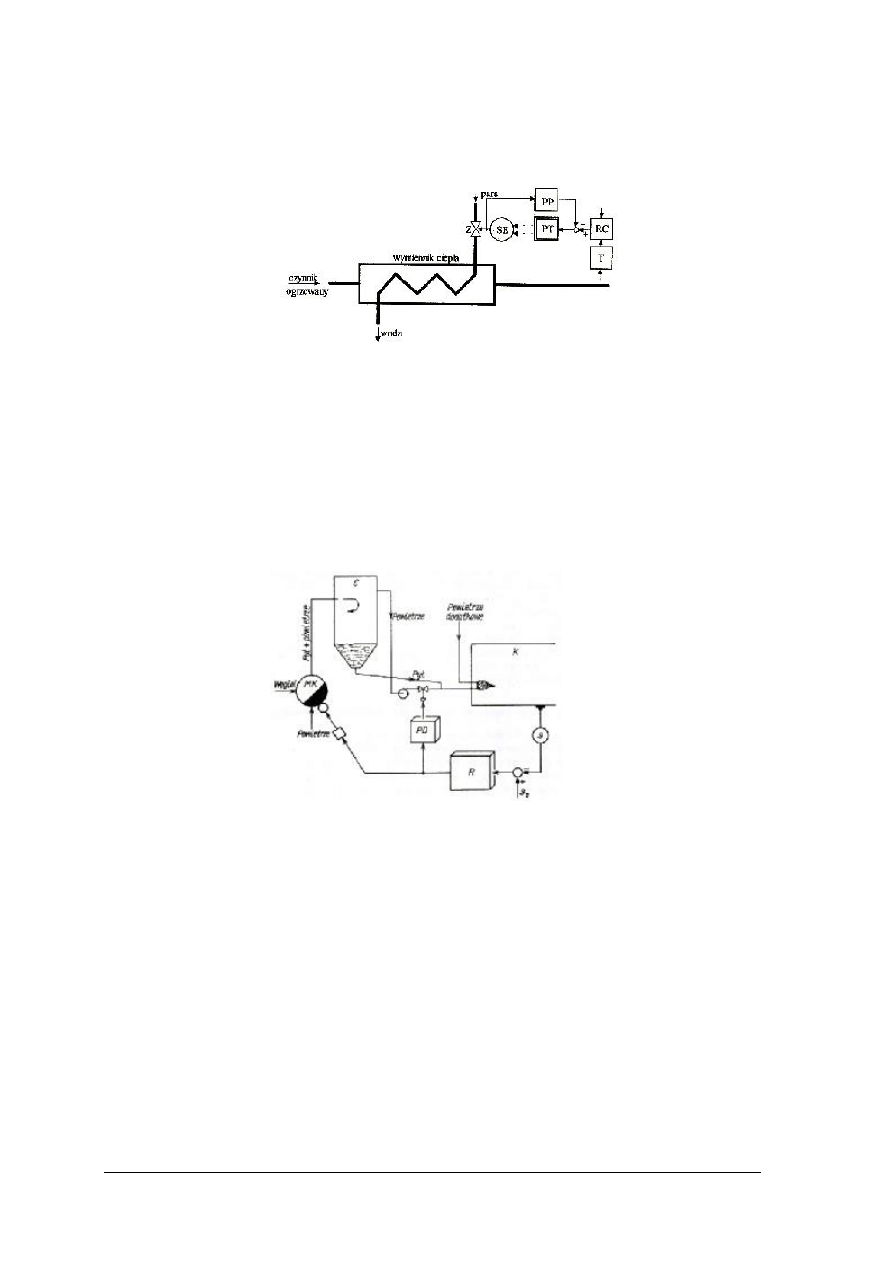
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
60
Rys. 45. Układ regulacji temperatury z regulatorem krokowym: SE – silnik
elektryczny, PP – przetwornik położenia wału silnika, PT – przekaźnik
trójpołożeniowy, T– przetwornik pomiarowy temperatury, RC – regulator,
Z – zawór
W węźle sumacyjnym, następuje porównanie sygnału wyjściowego z regulatora (sygnał
prądowy) z sygnałem z przetwornika położenia. W przypadku nierówności sygnałów
(z uwzględnieniem stref nieczułości i strefy niejednoznaczności) następuje uruchomienie
silnika w odpowiednim kierunku aż do zrównania się tych sygnałów.
Rys. 46. Układ regulacji temperatury komory nagrzewanej pyłem węglowym z pomocniczą
wielkością nastawiającą: MK – młyn kulowy, C – cyklon, R – regulator,
PD –regulator pomocniczy typu PD, K – komora spalania [10, s. 413]
Przykładem układu regulacji z pomocniczą wielkością nastawiającą jest układ regulacji
temperatury w komorze K nagrzewanej pyłem węglowym (rys. 46). Po zmieleniu węgla
w młynie kulowym MK pył zostaje przetransportowany wraz ze strumieniem powietrza do
cyklonu C, gdzie osiada na jego dnie. Prosty sposób regulacji może polegać na pomiarze
temperatury i oddziaływaniu na prędkość kątową młyna. Cecha charakterystyczną takiego
obiektu jest duża wartość czasu opóźnienia oraz stałej czasowej. Dla polepszenia regulacji
wykorzystano jako pomocniczą wielkość nastawiającą strumień powietrza dostarczający pył
węglowy bezpośrednio do komory spalania. Zmniejszenie się wartości temperatury
ϑ
w stosunku do zadanej
o
ϑ
powoduje:
−
zwiększenie stopnia otwarcia zaworu, wskutek czego nastąpi chwilowe zwiększenie
przepływu powietrza porywającego za sobą cząstki pyłu,
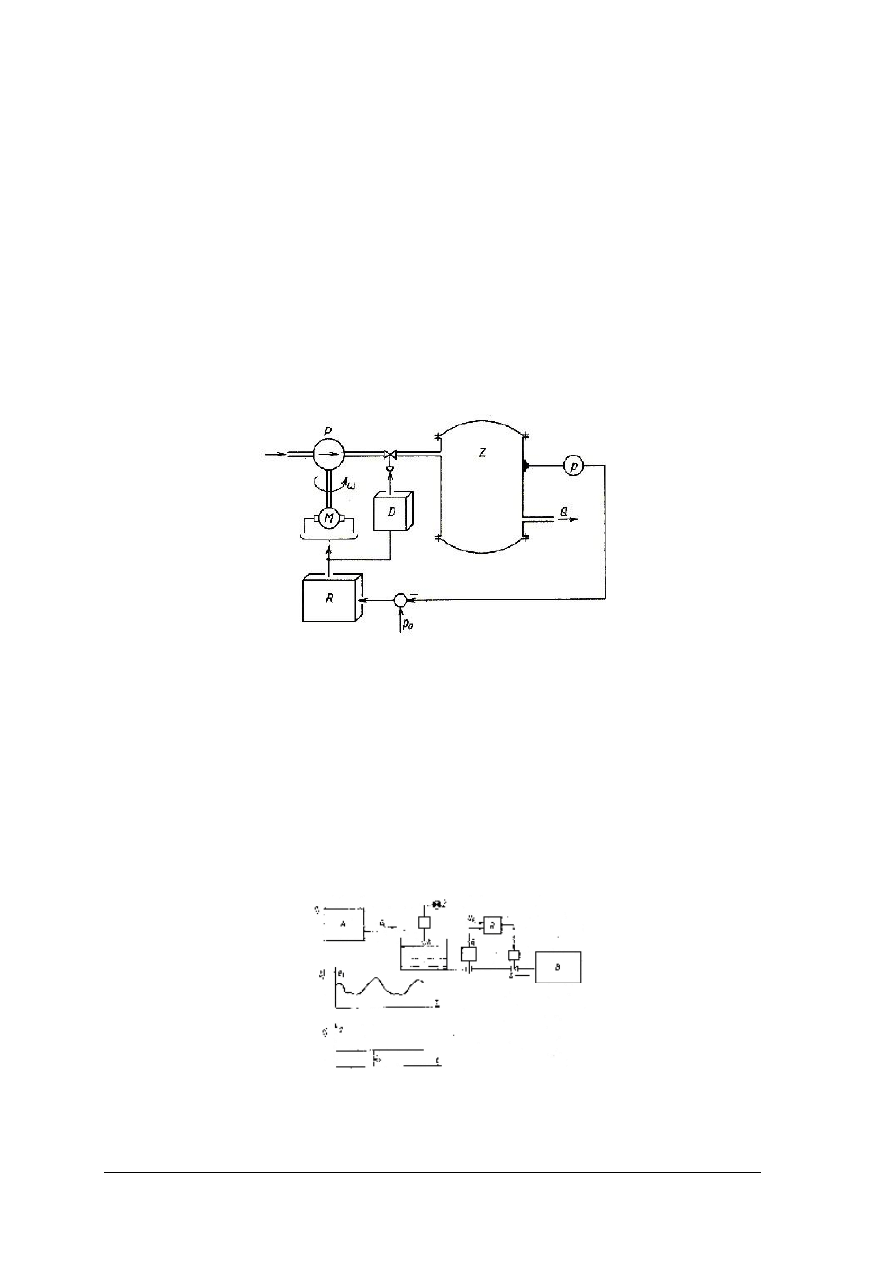
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
61
−
zwiększenie prędkości kątowej młyna, co z kolei spowoduje zwiększenie ilości
wytwarzanego paliwa.
Powietrze dodatkowe doprowadzone bezpośrednio do komory spalania uzupełnia ilość
powietrza do całkowitego spalania.
Układ regulacji ciśnienia w zbiorniku z wykorzystaniem pomocniczej wielkości
nastawiającej przedstawia rys. 47. Wielkością regulowaną jest ciśnienie w zbiorniku
zasilanym przez pompę P. Nastawianie ciśnienia przez zmianę prędkości kątowej
ω
pompy
P jest sposobem bardzo ekonomicznym (małe zużycie energii), ale równocześnie bardzo
powolnym. Zmniejszenie odpływu Q ze zbiornika powoduje w nim nadmierny wzrost
ciśnienia, co jest bardzo niebezpieczne. Zastosowanie zaworu pomocniczego powoduje,
w przypadku wzrostu ciśnienia, szybkie przymknięcie zaworu. Spowoduje to zwiększenie
spadku ciśnienia na zaworze nie dopuszczając do wystąpienia nadmiernego ciśnienia
w zbiorniku. W normalnym stanie pracy zawór jest całkowicie otwarty.
Rys. 47.
Układ regulacji ciśnienia w zbiorniku, z wykorzystaniem pomocniczej wielkości
nastawiającej: P – pompa, Z – zbiornik, R – regulator, D – regulator typu
D, M – silnik [10, s. 381]
Układ regulacji przepływu
Na rys. 48 przedstawiony jest układ stabilizacji zasilania. Aparat B wymaga stałego
w czasie natężenia dopływu Q (rys. 48 c). Stabilność zapewnia regulator R. Ponieważ aparat
A dostarcza zmiennego w czasie przepływu Q
1
(rys. 48 b), który ze względów
technologicznych nie może być stabilizowany, zatem w układzie zainstalowano
międzyoperacyjny zbiornik buforowy. Pozim h w tym zbiorniku ulega zmianom wraz ze
zmianami natężenia dopływu Q
1
. W układzie zastosowano sygnalizację granicznej górnej
wartości poziomu h
max
przez włączenie czerwonej lampki Ż.
Rys. 48.
Układ stabilizacji natężenia dopływu cieczy do agregatu technologicznego:
a) schemat aparatury technologicznej i regulacyjnej, b) wykres zmian w czasie
przepływu Q
1
, c) przebieg stały w czasie natężenia dopływu Q [10, s. 370]
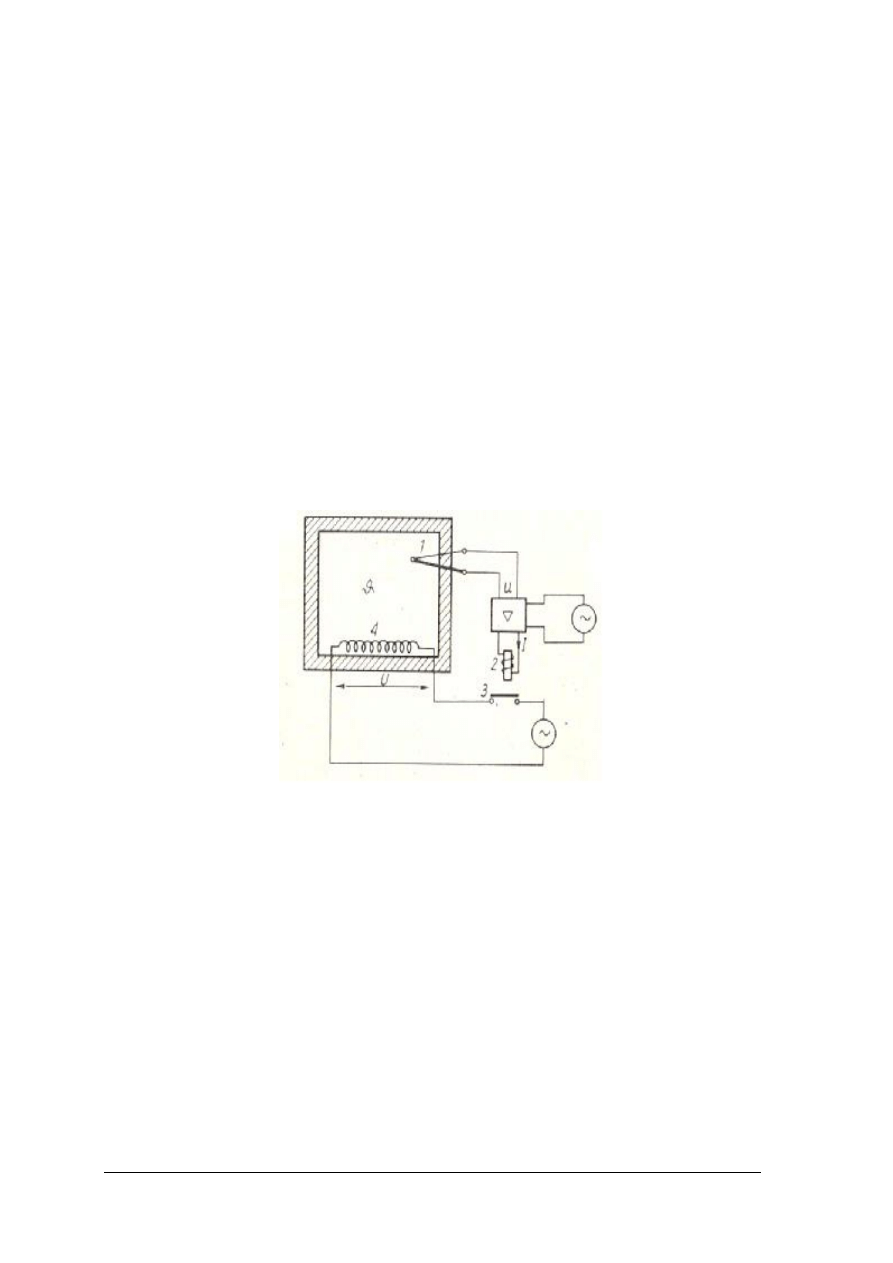
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
62
4.9.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak działa regulator dwustanowy z pomocniczym sprzężeniem zwrotnym?
2. Dlaczego w układzie regulacji temperatury z regulatorem dwustawnym z pomocniczym
sprzężeniem zwrotnym nie dochodzi do zbyt dużych przeregulowań wartości
regulowanej?
3. Jakie wartości może przyjmować wielkość sterująca w układzie temperatury
w wymienniku ciepła z regulatorem trójstawnym?
4. W jaki sposób oddziaływuje na układ regulacji ciśnienia w zbiorniku pomocnicza
wielkość nastawiająca?
5. Dlaczego w układzie stabilizacji dopływu cieczy zastosowano sygnalizację świetlną
poziomu w zbiorniku buforowym?
4.9.3. Ćwiczenia
Ćwiczenie 1
Dokonaj montażu i badania układu automatycznej regulacji temperatury z regulatorem
dwustawnym.
Rysunek do ćwiczenia 1.
Schemat
układu
dwustawnej
regulacji
temperatury
pieca
elektrycznego: 1 – termoelement, dwuelektromagnes, 3 – zwora
elektromagnesu, 4 – grzejnik
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z materiałem teoretycznym o regulacji dwustawnej,
2) przygotować stanowisko do pracy,
3) zapoznać się z elementami składowymi układu regulacji (sprawdzić czy układ jest
odłączony od sieci zasilającej),
4) zbadać właściwości dynamiczne obiektu włączając ręcznie uzwojenie grzejnika,
5) zdjąć charakterystykę obiektu
υ
ob
= f(t),
6) powtórzyć pomiary dla innej mocy grzejnika i dla innego umiejscowienia czujnika
temperatury,
7) wyjaśnić różnice przebiegu otrzymanych krzywych
υ
ob
= f(t),

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
63
8) określić wartość temperatury zadanej
υ
0
równej w przybliżeniu połowie wartości
maksymalnej, dla grzejnika o mniejszej mocy,
9) połączyć układ dwustawnej regulacji temperatury według załączonego schematu na rys.
do ćwiczenia,
10) zgłosić gotowość wykonania ćwiczenia prowadzącemu,
11) przystąpić, po sprawdzeniu poprawności projektu i połączeń przez nauczyciela oraz
otrzymaniu zezwolenia, do sprawdzenia poprawności działania układu,
12) zarejestrować wahania temperatury i napięcia grzejnika,
13) zmienić moc grzejnika oraz umiejscowienie czujnika,
14) obserwować wpływ powyższych zmian na amplitudę wahań temperatury rejestrowanej,
15) powtórzyć pomiary dla wartości zadanej
υ
0
większej i mniejszej o 30% od
dotychczasowej wartości zadanej,
16) narysować na papierze milimetrowym otrzymane przebiegi regulacji temperatury,
17) odczytać z wykresu okres zmian, amplitudę zmian,
18) wyznaczyć wartość średnią temperatury dla wartości zadanych,
19) porównać i uzasadnić otrzymane wyniki i wykresy,
20) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
—
piec elektryczny,
—
termoelement,
—
wzmacniacz,
—
przekaźnik,
—
miernik uniwersalny,
—
stoper,
—
przewody łączące,
—
papier milimetrowy,
—
przybory do pisania i rysowania,
—
literatura wskazana przez nauczyciela.
Ćwiczenie 2
Zmontuj i zbadaj układ regulacji dwustawnej poziomu cieczy w zbiorniku z wypływem
wymuszonym.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się materiałem teoretycznym dotyczącym regulatorów dwustawnych,
2) przygotować stanowisko do pracy,
3) zapoznać się ze sposobem użycia rejestratora,
4) zapoznać się ze strukturą regulatora, rodzajem i zakresem nastaw oraz możliwością
wyłączenia korekcyjnego sprzężenia zwrotnego,
5) zmontować układ do zdejmowania charakterystyki statycznej regulatora,
6) dokonać pomiarów a wyniki zanotować w przygotowanej tabelce,
7) wykreślić charakterystykę statyczną regulatora bez korekcyjnego sprzężenia zwrotnego,
8) wyznaczyć zakres strojenia histerezy H,
9) sporządzić charakterystykę u
śr
= f(ε) dla kilku nastaw regulatorów [u
śr
= t
z
/(t
z
+ t
w
)],
10) wyznaczyć charakterystykę skokową obiektu przeznaczonego do współpracy
z regulatorem dwustawnym,
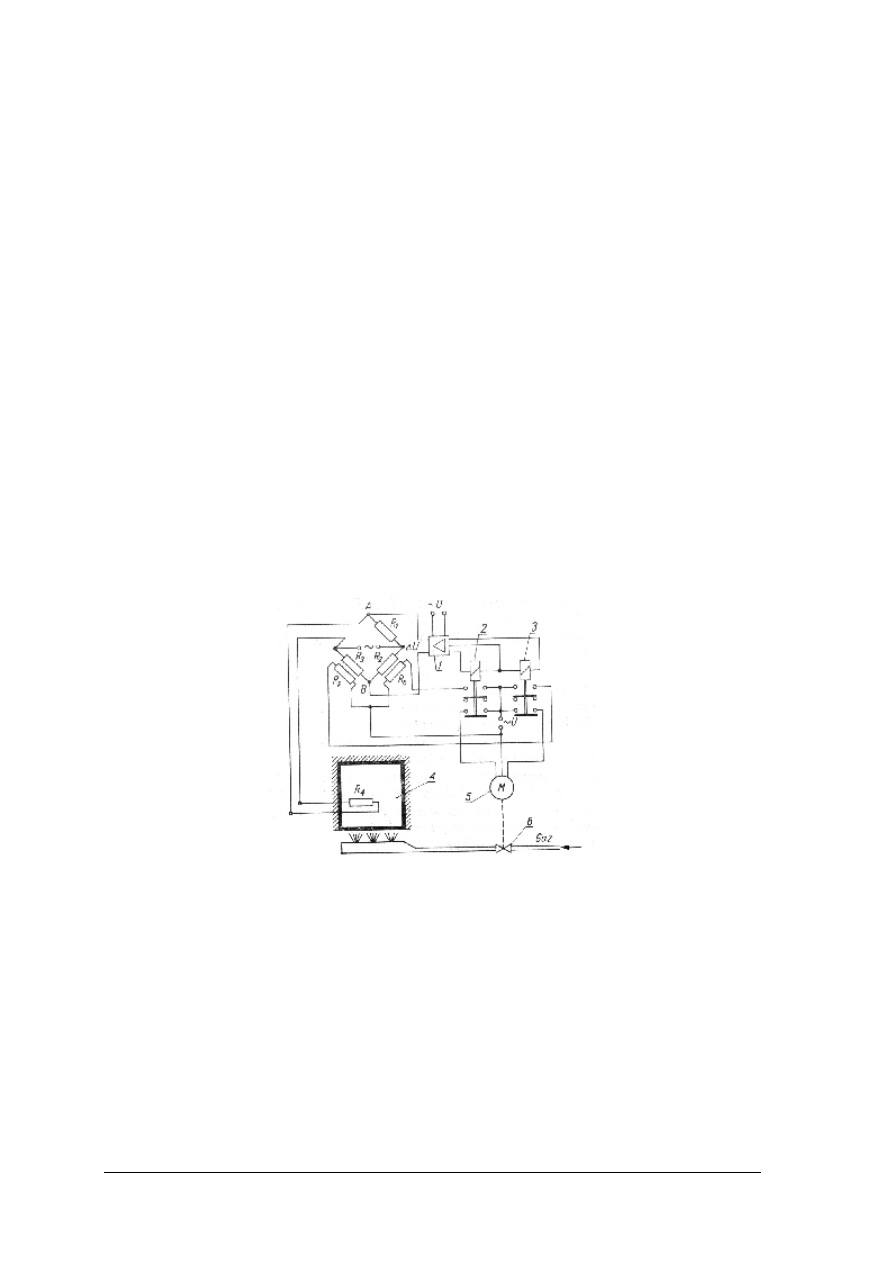
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
64
11) połączyć układ regulacji z możliwością rejestracji przebiegu poziomu cieczy
w zbiorniku,
12) zanotować czasy załączenia i wyłączenia regulatora oraz amplitudę oscylacji,
13) zarejestrować przebiegi poziomu cieczy dla różnych wartości histerezy H regulatora oraz
wielkości natężenia strumienia wypływającego cieczy,
14) sporządzić dokumentację techniczną z wykonanych badań,
15) sporządzić wnioski z przeprowadzonych badań.
Wyposażenie stanowiska pracy:
−
regulator dwustawny (alternatywnie regulator wielofunkcyjny lub sterownik PLC),
−
instalacja zbiornika cieczy z wypływem wymuszonym,
−
poziomomierz pływakowy,
−
instrukcje obsługi, karty katalogowe, Dokumentacja Techniczno-Ruchowa urządzeń,
−
miernik uniwersalny (alternatywnie układ do rejestracji zmiennych procesowych, np.
miernik uniwersalny z interfejsem, komputer z oprogramowaniem, drukarka),
−
rejestrator,
−
stoper,
−
przybory do pisania i rysowania,
−
literatura wskazanaprzez nauczyciela.
Ćwiczenie 3
Wykonaj badanie układu regulacji trójstawnej i krokowej oraz wpływu parametrów
poszczególnych elementów na jakość regulacji.
Rysunek do ćwiczenia 3.
Układ regulacji z regulatorem krokowym: 1 – wzmacniacz,
2, 3 – styczniki, 4 – piec, 5 – silnik nawrotny, 6 – zawór
[1 s. 222]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
65
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zorganizować stanowisko pracy do wykonania ćwiczenia,
2) zapoznać się z właściwościami układu badanego w ćwiczeniu (funkcjami, sposobem
łączenia elementów, możliwością rejestrowania przebiegów),
3) zapoznać się ze sposobem użycia rejestratora,
4) zapoznać się z dokumentacją i konstrukcją regulatora,
5) przygotować układ do badań,
6) wyznaczyć zakres nastaw: strefy nieczułości Δ i histerezy H w elemencie trójstawnym,
7) zapoznać się z silnikiem współpracującym z regulatorem trójstawnym,
8) wyznaczyć czas przejścia pełnego zakresu przez silnik współpracujący z regulatorem
trójstawnym,
9) wyznaczyć charakterystykę statyczną i dynamiczną serwomechanizmu przekaźnikowego,
10) zbadać wpływ parametrów strefy nieczułości Δ i histerezy H na właściwości silnika,
11) wyznaczyć dla regulatora krokowego w układzie otwartym charakterystykę
impulsowania–wypełnienie t
z
/(t
z
+ t
w
) w funkcji uchybu ε (t
z
, t
w
–czasy załączenia
i wyłączenia wyjścia przełączanego w jednym okresie impulsowania),
12) zbadać wpływ parametrów Δ i H i nastaw dynamicznych na kształt charakterystyki
impulsowania,
13) wyznaczyć czas przejścia pełnego zakresu przesunięcia silnika współpracującego
z regulatorem krokowym,
14) zarejestrować odpowiedź obiektu na skokową zmianę wartości zadanej oraz na zmianę
zakłócenia w obiekcie dla układu z regulatorem krokowym,
15) sformułować wnioski,
16) wykonać dokumentację ćwiczenia,
17) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
−
regulator trójstawny (alternatywnie regulator wielofunkcyjny wraz z oprogramowaniem
do konfigurowania regulatora lub sterownik PLC),
−
obiekt regulacji (piec ogrzewany gazem),
−
silnik,
−
instrukcje obsługi, karty katalogowe, Dokumentacja Techniczno–Ruchowa (DTR),
−
miernik uniwersalny,
−
rejestrator (alternatywnie układ do rejestracji zmiennych procesowych, np. miernik
uniwersalny z interfejsem, komputer z oprogramowaniem, drukarka),
−
stoper,
−
przybory do pisania i rysowania,
−
literatura wskazana przez nauczyciela.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
66
4.9.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) zaprojektować układ regulacji dwustawnej temperatury?
2) wyjaśnić wpływ histerezy regulatora dwustawnego na działanie
układu regulacji automatycznej?
3) wyznaczyć z przebiegów regulacji temperatury w układzie regulacji
dwupołożeniowej amplitudę oscylacji, częstotliwość oscylacji, histerezę
przekaźnika?
4) zmontować prosty układ regulacji temperatury?
5) skonfigurować regulator trójstawny w regulatorze wielofunkcyjnym?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
67
4.10. Instalacja i obsługa urządzeń regulacji
4.10.1. Materiał nauczania
Aparatura regulacyjna montowana jest w szafach i na stojakach w odpowiednich
pomieszczeniach lub w pobliżu obiektów. Konstrukcje urządzeń montowanych obok
obiektów są dostosowane do pracy na wolnym powietrzu. Muszą być odporne na działanie
wilgoci, pyłów, gazów, zmiany temperatury. W związku z tym stosuje się różnego rodzaju
uszczelnienia i zabezpieczenia przed czynnikami zewnętrznymi. W trakcie instalowania
należy przestrzegać zaleceń producentów. Dotyczy to również dokładnego, zgodnego
z dokumentacją wykonania połączeń. Należy uważać aby przewodów sygnałowych nie
poprowadzić obok przewodów zasilających. Przewody sygnałowe powinny być prowadzone
innymi trasami niż przewody zasilające dla zmniejszenia zakłóceń przenoszonych przez
pojemności i indukcyjności wzajemne. W wielu układach stosowane są filtry
przeciwzakłóceniowe, układy ograniczające wartość napięć i układy ograniczające wartości
prądów. Układy ograniczające wartość napięć zabezpieczają urządzenia przed uszkodzeniami
w razie przypadkowego dołączenia zbyt wysokiego napięcia (np. zwarcie z przewodami
zasilającymi). W instalacjach wymagających zabezpieczenia przeciwwybuchowego, układy
ograniczające wartość prądów uniemożliwiają powstanie iskry w przypadku zwarcia
przewodów sygnałowych.
Przy montażu urządzeń pneumatycznych należy szczególnie starannie wykonać
połączenia ponieważ ich szczelność ma wpływ na poprawną pracę układów pneumatycznych.
W trakcie instalacji urządzeń pneumatycznych należy zachować maksymalną czystość.
Zastosowanie zanieczyszczonych przewodów w trakcie montażu może doprowadzić do
zanieczyszczenia wodą, pyłem urządzeń pneumatycznych, które będą wymagały demontażu,
czyszczenia i ponownego montażu. Należy zachować odpowiednio duże łuki zagięć
przewodów pneumatycznych, aby nie utrudniać przepływ powietrza. W związku z tym należy
odpowiednio rozmieścić urządzenia i trasy prowadzenia przewodów.
Montaż mierników, regulatorów odbywa się w szafach lub tablicach za pomocą
uchwytów i elementów łączących zgodnie z dokumentacją. Należy zwracać uwagę na
wypoziomowanie montowanej aparatury oraz zamocowanie jej zgodnie z podaną pozycją
pracy.
Od umiejętności montażu przyrządów pomiarowych zależy, w dużym stopniu, poprawna
praca urządzeń automatyki. Najlepiej jest dokonywać montażu ściśle według wskazań
producentów aparatury kontrolno-pomiarowej. Podczas instalacji czujników pomiarowych
należy m.in. przestrzegać następujących zasad:
−
instalowany czujnik nie może zmieniać warunków pracy obiektu (wymiary czujnika
powinny być dobrane do wymiarów obiektu),
−
wynik pomiaru musi być reprezentatywny dla wielkości kontrolowanej (należy wybrać
odpowiednie miejsce na zainstalowanie czujnika),
−
miejsce i sposób instalacji czujnika należy wybrać z uwzględnieniem warunków
wynikających z fizycznej zasady pomiaru, np. przepływomierze powinny być
instalowane w prostoliniowym odcinku rurociągu.
Montaż czujników i przyrządów pomiarowych, w przypadku gdy mierzone środowisko
charakteryzuje się następującymi cechami: zanieczyszczeniami cieczy i gazów,
właściwościami korozyjnymi, właściwościami trującymi, wysoką temperatura i ciśnieniem,
wymaga spełnienia specjalnych warunków.
Jeżeli w mierzonym medium występują zanieczyszczenia to należy stosować urządzenia
umożliwiające okresowe lub ciągle czyszczenie elektrod oraz przedmuchiwanie przewodów
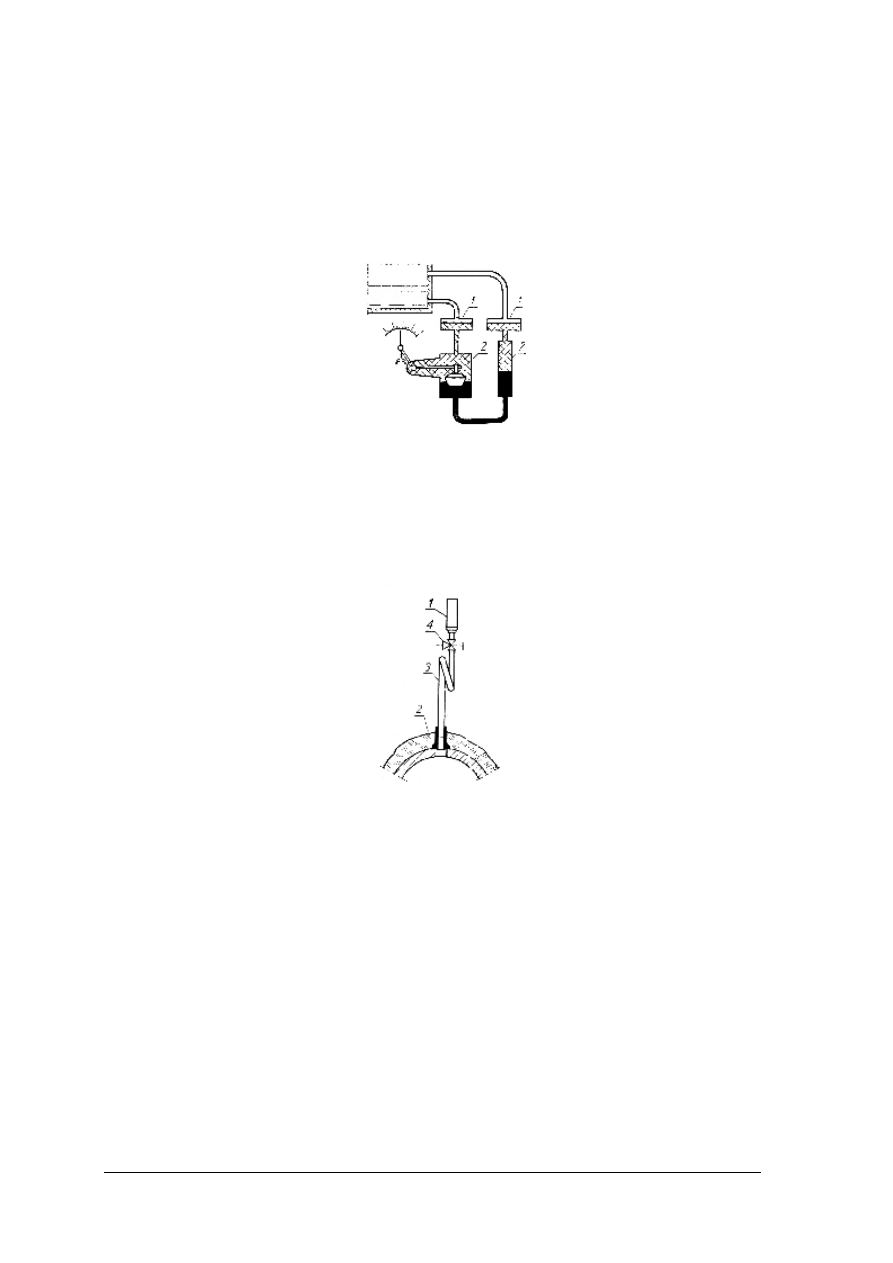
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
68
sygnałowych. W przypadku środowiska o właściwościach korozyjnych należy stosować
przyrządy i czujniki w odpowiednio dobranych osłonach.
Na rys. 49 przedstawiono przykład pomiaru cieczy silnie reagującej chemicznie
znajdującej się w zbiorniku ciśnieniowym. W celu chronienia manometru różnicowego
umieszczono na jednym poziomie naczynia oddzielające wypełnione płynem chroniącym
przed szkodliwym wpływem substancji zawartej w zbiorniku.
Rys. 49. Pomiar poziomu cieczy silnie reagującej: 1 – naczynia oddzielające, 2 – ciecz chroniąca [10, s. 510]
Na rys. 50 przedstawiono sposób instalacji manometru w przewodzie rurowym,
w którym znajduje się sprężony gaz o wysokiej temperaturze. Aby umożliwić dostateczne
odprowadzenie ciepła skręcono przewód połączeniowy. Zainstalowany zawór trójdrożny
służy do dołączania manometru wzorcowego lub do przedmuchiwania przewodu
połączeniowego.
Rys. 50.
Pomiar ciśnienia gorącego gazu: 1 – manometr, 2 – przewód rurowy,
3 – przewód połączeniowy, 4 – zawór trójdrożny [10, s. 510]
Przy instalowaniu czujników temperatury (termoelektrycznych i oporowych – rys. 51)
należy: izolować cieplnie wystające części osłony czujnika aż do głowicy, odpowiednio
głęboko zanurzyć czujnik w ośrodku mierzonym (cały czujnik powinien być umieszczony
w stałej temperaturze), stosować możliwie najdłuższe czujniki, w rurociągach o małym
natężeniu przepływu gazu instalować czujnik na odcinku rurociągu o zmniejszonym
przekroju (zwiększa się intensywność przejmowania ciepła), stosować ekrany chroniące
osłony czujników przed promieniowaniem cieplnym mierzonego ośrodka.
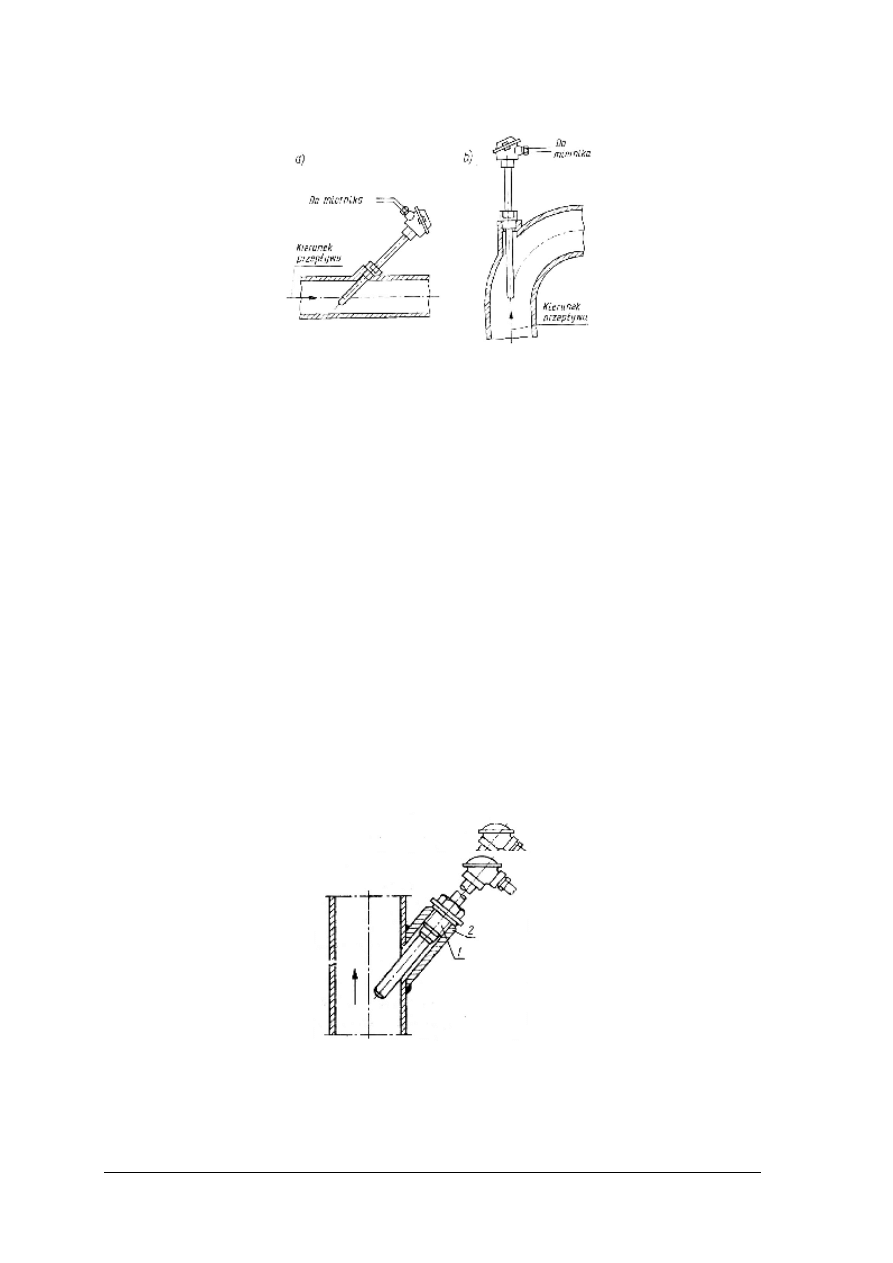
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
69
Rys. 51. Prawidłowy sposób instalowania czujników temperatury: a) na prostym
odcinku rurociągu, b) na kolanie rurociągu [1, s. 97]
4.10.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jak należy prowadzić przewody sygnałowe i zasilające aby zmniejszyć zakłócenia?
2. Dlaczego należy zachować dostatecznie duże łuki zagięć przewodów pneumatycznych?
3. Jakie jest przeznaczenie układów ograniczających wartość napięć?
4. W jakim celu instaluje się układy ograniczające wartości prądów?
5. Jakie zasady należy przestrzegać przy montażu czujników?
6. Jakie należy stosować urządzenia w przypadku instalacji przyrządów pomiarowych
w środowisku zanieczyszczonym lub chemicznie agresywnym?
7. W jaki sposób chroniony jest manometr w trakcie pomiaru cieczy agresywnej chemicznie
w zbiorniku ciśnieniowym?
4.10.3. Ćwiczenia
Ćwiczenie 1
Na rysunku poniżej przedstawiono sposób zainstalowania czujnika oporowego do
pomiaru temperatury gazu w rurociągu. Określ czy podany przykład budowy gniazda
czujnika zapewni prawidłowy pomiar temperatury gazu? Odpowiedź uzasadnij.
Rysunek do ćwiczenia 1. Budowa gniazda czujnika oporowego: 1 – korpus (osłona) czujnika, 2 – dospawana
rura [10, s. 511]
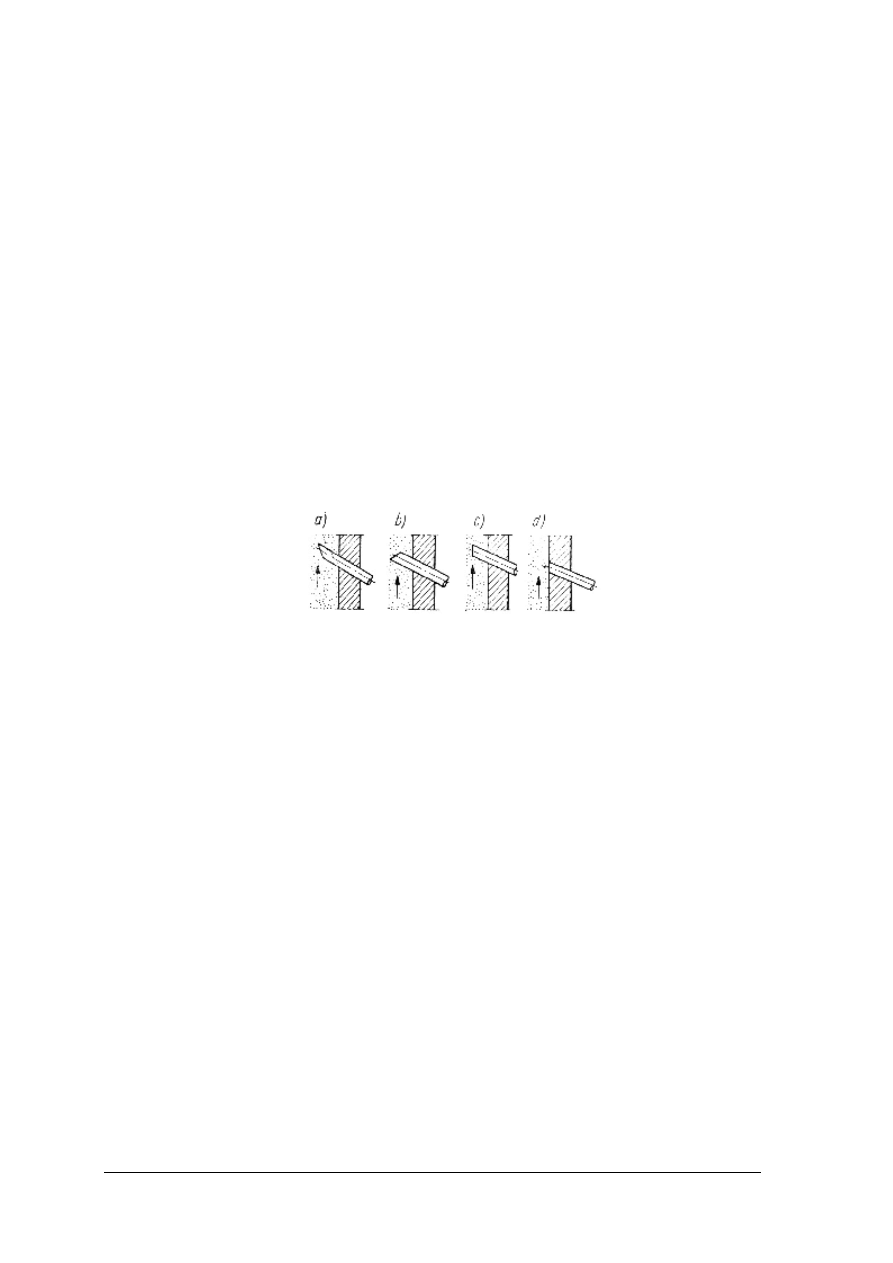
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
70
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować zasady montażu czujników i przyrządów pomiarowych,
2) ocenić poprawność budowy gniazda czujnika rezystancyjnego,
3) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
–
treść zadania dla każdego ucznia,
–
materiały i przybory do pisania,
–
literatura wskazana przez nauczyciela.
Ćwiczenie 2
Na rysunku poniżej przedstawiono różne zakończenia przewodu sygnałowego.
Przeanalizuj, które zakończenie jest prawidłowe w przypadku gdy:
−
przyrządem pomiarowym jest manometr różnicowy mierzący bardzo małą różnicę
ciśnienia między wnętrzem przewodu (część zakropkowana) i otaczającą atmosferą,
−
przyrządem odbiorczym jest sygnalizator spalin.
Rysunek do ćwiczenia 2[9, s. 511]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować rysunek pod kątem zakłóceń powodujących fałszywy odczyt,
2) wybrać prawidłowe zakończenie przewodu sygnałowego w przypadku instalowania
manometru różnicowego,
3) przeanalizować działanie analizatora spalin pod kątem skrócenia jego czasu opóźnienia,
4) wybrać prawidłowe zakończenie przewodu sygnałowego w przypadku instalowania
analizatora spalin,
5) uzasadnić swoje wybory,
6) zaprezentować wykonane ćwiczenie.
Wyposażenie stanowiska pracy:
−
treść zadania dla każdego ucznia,
−
materiały i przybory do pisania,
−
literatura wskazana przez nauczyciela
.
Ćwiczenie 3
Pomiary natężenia przepływu cieczy, gazów i par wymagają szczególnej staranności. Na
rysunku poniżej zamieszczono szkice instalacji manometru różnicowego dla dwóch
przypadków pomiaru natężenia przepływu za pomocą zwężki:
−
gdy instalowany manometr znajduje się poniżej zwężki,
−
gdy instalowany manometr znajduje się powyżej zwężki.
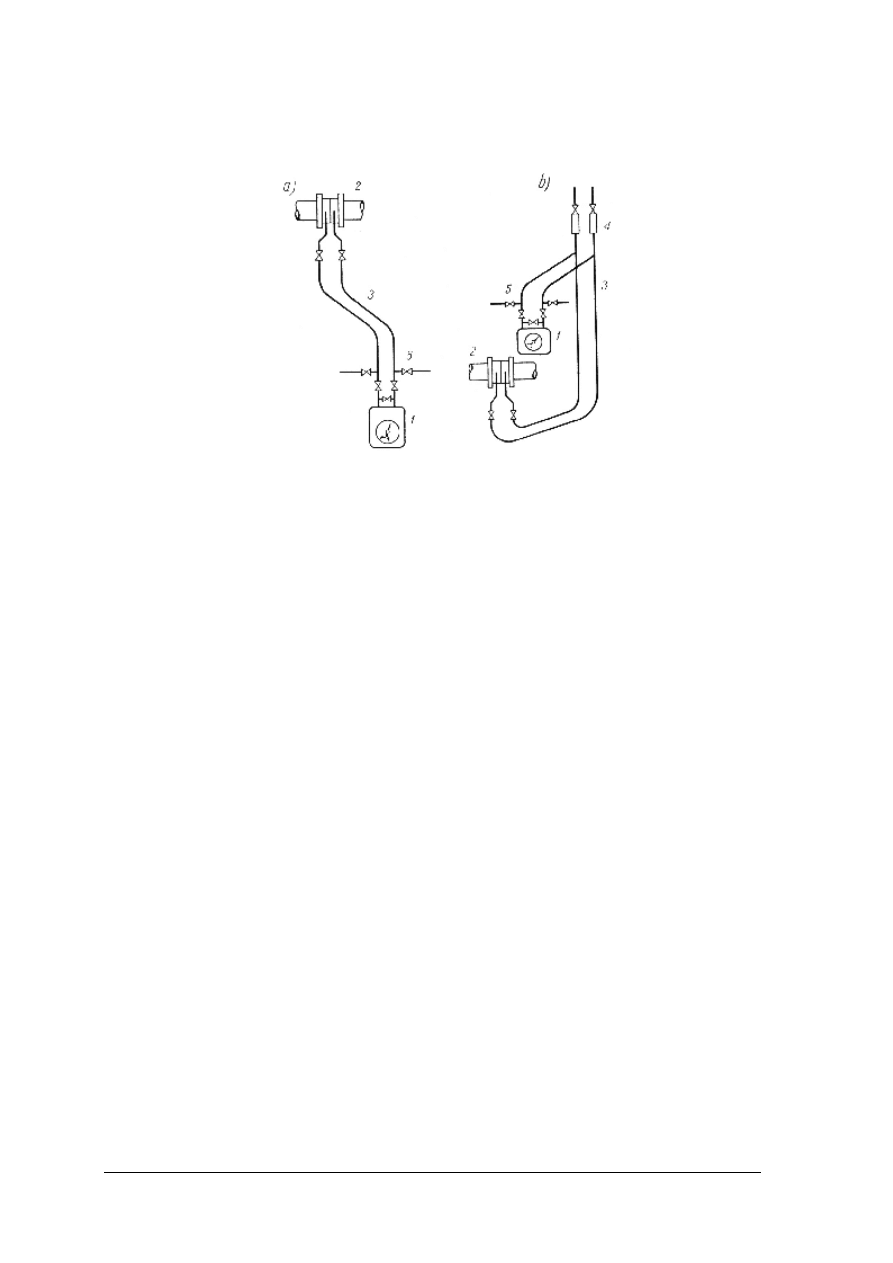
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
71
Uzasadnij poprawność montażu manometru w obu przypadkach oraz wyjaśnij
konieczność instalacji dodatkowych elementów oraz sposób prowadzenia przewodów.
Rysunek do ćwiczenia 3. Pomiar natężenia przepływu cieczy: a) manometr różnicowy
(1) znajduje się poniżej zwężki (2), b) manometr różnicowy
(1) znajduje się powyżej zwężki (2); 3 – przewody łączące,
4 – zbiorniki na gaz wydzielany z cieczy, 5 – odprowadzenia
i zawory do przedmuchiwania przewodów sygnałowych [10, s. 512]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować rysunek pod kątem konieczności odprowadzenia pęcherzyków gazu
zawartych w cieczy do rurociągu (zwrócić uwagę na nachylenie przewodów łączących 3
oraz zainstalowanie zbiorników 4),
2) podać jakie skutki pociągnęłoby nie odprowadzenie gazu we wskazaniach przyrządu
pomiarowego,
3) podać w jakim celu zainstalowano zawory,
4) zaprezentować wykonane ćwiczenie,
5) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska pracy:
−
treść zadania dla każdego ucznia,
−
materiały i przybory do pisania,
−
literatura wskazana przez nauczyciela.
4.10.4. Sprawdzian postępów
Czy potrafisz:
Tak Nie
1) ocenić poprawność budowy gniazda czujnika oporowego?
2) określić zadanie pomiarowe realizowane przez analizator spalin?
3) wyjaśnić dlaczego w układach pomiarowych zakończenie przewodu
sygnałowego ma tak istotne wpływ na wynik pomiaru?
4) wyjaśnić w jakim celu przedmuchuje się przewody sygnałowe?
5) wyjaśnić dlaczego niedopuszczalne są poziome odcinki przewodów
łączących w instalacji do pomiaru natężenia przepływu?
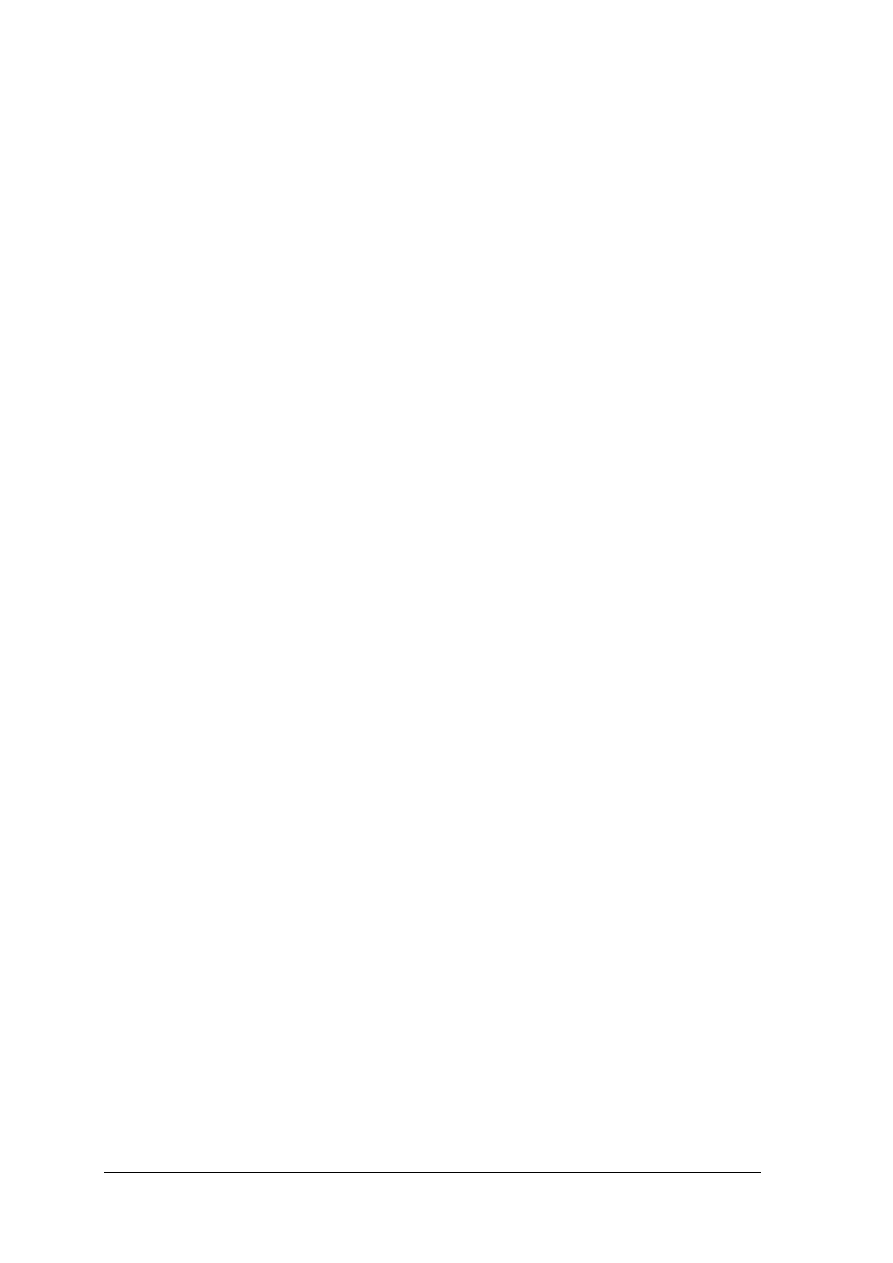
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
72
4.11. Zabezpieczenia w układach automatyki
4.11.1. Materiał nauczania
W układach automatyki przemysłowej stosuje się dużą grupę urządzeń tworzących
układy sygnalizacji, blokad i zabezpieczeń. Funkcją układów sygnalizacji jest zwrócenie
uwagi operatora procesu przemysłowego na zaistnienie zdarzenia, które są ważne dla
bezpieczeństwa ludzi, trwałości instalacji, jakości produkcji itp. Układy sygnalizacji możemy
podzielić na: sygnalizację kontrolno-wskaźnikową, ostrzegawczą i awaryjną. Informacja
o zaistniałym zdarzeniu powinna niezwłocznie być przekazana do operatora w postaci
sygnału świetlnego i/lub dźwiękowego. Dla ułatwienia odbioru sygnałów świetlnych jest
przyjęty sposób organizacji „na ciemno” (sygnał świetny wyłączony – bieg prawidłowy) lub
„jasno” (gdy sygnał świetlny znika – należy interweniować).
Montowanie blokad automatycznych ma na celu uniemożliwienie środkami technicznymi
użycie aparatu w warunkach niezgodnych z jego przeznaczeniem, a zagrażającym samemu
aparatowi, otoczeniu jak i bezpieczeństwu użytkownika.
Zabezpieczenia automatyczne mają za zadanie chronić instalację i otoczenie przed
szkodliwymi warunkami eksploatacji zabezpieczanego aparatu. Najczęściej polega to na
wymuszeniu stanu uznanego za bezpieczny bez możliwości samoczynnego wyjścia z tego
stanu po zaniknięciu zagrożenia (zabezpieczenia przeciwzwarciowe i termiczne).
Coraz częściej zastosowanie mają urządzenia i układy automatyki w sprzęcie
powszechnego użytku. Są to urządzenia zautomatyzowane. W urządzeniach tych mogą
występować niebezpieczne napięcia stałe i przemienne, wysoka temperatura, gaz, a także inne
czynniki. Wymagają one wyposażenia w układy automatyki, aby niemożliwe było:
−
porażenie prądem,
−
oparzenie,
−
powstanie pożaru,
−
zatrucie gazem i spalinami lub inne urazy mechaniczne.
W celu ochrony przed porażeniem prądem elektrycznym stosowane są przekaźniki
przeciwporażeniowe różnicowoprądowe.
W celu niedopuszczenia do powstania urazów mechanicznych stosuje się układy
uniemożliwiające dostęp do ruchomych bądź niebezpiecznych elementów (blokady) oraz
układy wyłączające urządzenia z chwilą otwarcia osłon (roboty kuchenne) lub pokryw (pralki,
zmywarki).
W celu ograniczenia możliwości powstania oparzeń stosuje się układy sygnalizujące
występowanie na powierzchni urządzeń wysokiej temperatury.
Układy ograniczające możliwość powstania pożaru mogą wyłączać urządzenia
elektryczne pozostawione bez dozoru. Dla zapewnienia bezpieczeństwa przeciwpożarowego
stosuje się układy sygnalizujące występowanie wysokiej temperatury lub obecność dymu
w pomieszczeniach. Układy te mogą być sprzężone funkcjonalnie z instalacją gaszącą.
Układy zabezpieczające przed wypływem z instalacji nie spalonego gazu i spalin to:
−
układy kontroli płomienia,
−
układy nadzoru drogi spalin.
W układzie nadzoru płomienia pilotującego (rys. 52) złącze dwóch metali jest
umieszczone w płomieniu, które po podgrzaniu wytwarza niewielkie napięcie ok. 1,5 V.
Napięcie to zasila cewkę elektromagnesu, która przytrzymuje zworę połączoną z zaworem
bezpieczeństwa. Gdy zgaśnie płomień – zanika napięcie i zwora nie jest przyciągana przez
elektromagnes. Momentalnie zamyka się zawór bezpieczeństwa. Ponowne uruchomienie
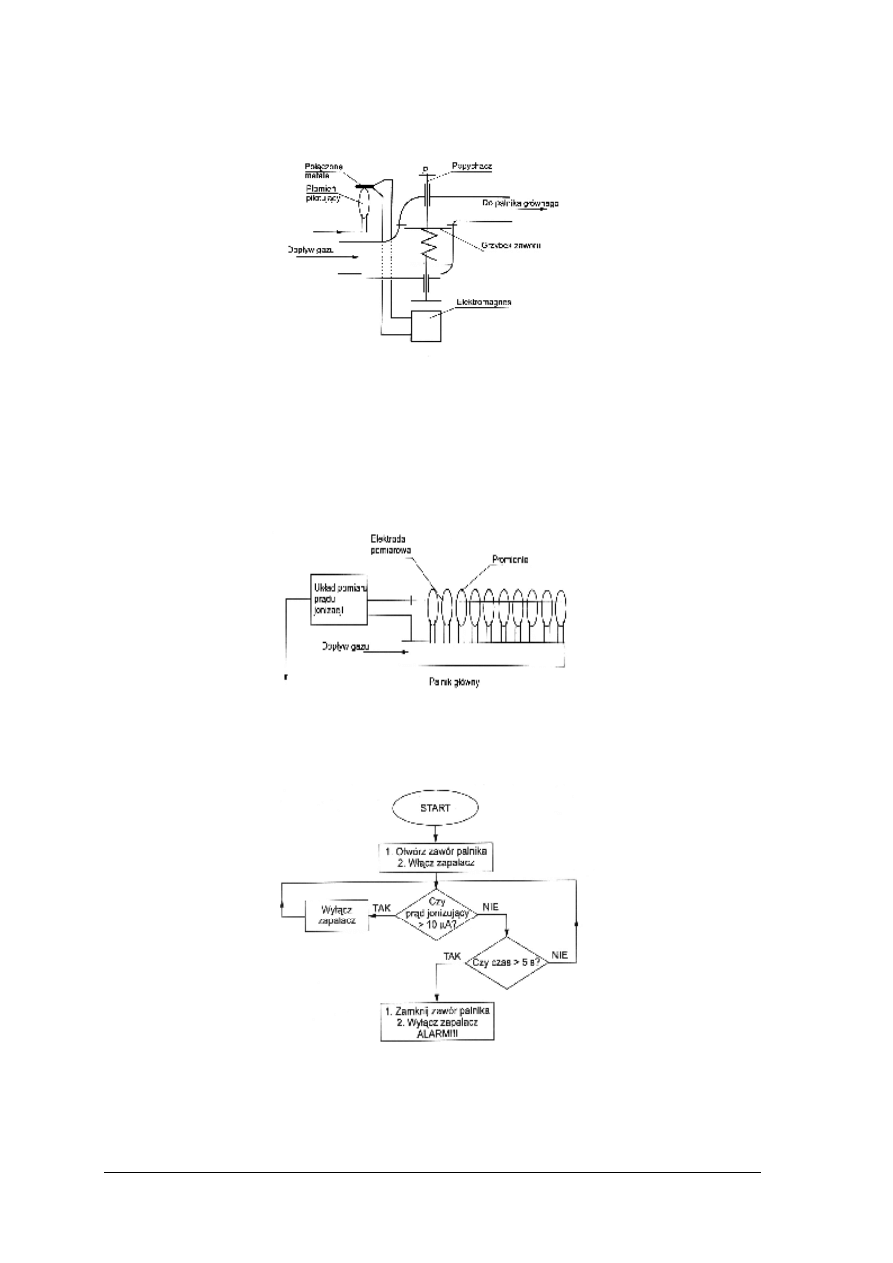
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
73
następuje po naciśnięciu przycisku P i zapaleniu płomienia pilotującego; po ok. 20 sek.
potrzebnych do ogrzania złącza należy zwolnić przycisk.
Rys. 52.
Sposób nadzoru płomienia pilotującego [2, s. 52]
W układzie zabezpieczenia przed wypływem nie spalonego gazu (rys. 53) wykorzystano
zjawisko jonizacji występujące w płomieniu. Powoduje ono, że podczas palenia się
płomienia, pomiędzy elektrodą a korpusem palnika występuje pewna skończona rezystancja,
która umożliwia przepływ prądu. Jeżeli wartość prądu wynosi ok. 10 μA to płomień się pali.
Układ elektroniczny mierzy wartość tego prądu i jeżeli jego wartość spadnie poniżej
opuszczalnej granicy to zamknie dopływ gazu do palnika.
Rys. 53.
Sposób zabezpieczenia przed wypływem nie spalonego gazu [2, s. 52]
Ponieważ w układzie brak płomienia pilotującego ponowny rozruch dokonuje specjalny
układ sterowania sekwencyjnego (rys. 54).
Rys. 54. Algorytm działania układu sterowania sekwencyjnego rozruchem [2, s. 53]
Urządzenia elektroniczne stosuje się w systemach alarmowych, które mają za zadanie
wykrywanie i sygnalizowanie nienormalnych warunków spowodowanych zaistniałym

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
74
niebezpieczeństwem. Systemy pełnej sygnalizacji, ze względu na rodzaj zagrożenia, dzielimy
na:
−
systemy sygnalizacji włamania i napadu,
−
systemy telewizji użytkowej,
−
systemy ochrony peryferyjnej,
−
systemy sygnalizacji pożaru.
Urządzenia alarmowe stosowane w powyższych systemach alarmowych podzielono
na następujące klasy:
−
klasa A – popularne,
−
klasa B – standardowe,
−
klasa C – profesjonalne,
−
klasa S – specjalne.
Czujniki włamaniowe stosowane w poszczególnych klasach mają specjalne układy, które
spełniają wymagania bezpieczeństwa poszczególnych systemów oraz chronionych obiektów.
Dotyczy to między innymi odporności na zakłócenia elektromagnetyczne, ochrony
przeciwsabotażowej, czasu sygnalizacji zakłócenia, sposobu montażu i warunków stosowania
urządzeń alarmowych.
Do wykrywania ruchu człowieka stosuje się następujące czujki:
−
pasywne podczerwieni, w których czujnik pyroelektryczny wykrywa obecność człowieka
jako zmianę promieniowania cieplnego,
−
mikrofalowe ruchu, w których do wykrywania poruszających się obiektów wykorzystano
fale elektromagnetyczne,
−
zespolone (dualne), złożone z detektora podczerwieni pasywnej i detektora mikrofali.
Do ochrony okien i drzwi stosuje się czujki magnetyczne stykowe, składające się
z dwóch elementów – magnesu i kontaktronu. Stosowane są także czujki stłuczenia szyby
reagujące na drgania mechaniczne szyby podczas uderzenia (czujki pasywne) oraz reagujące
na hałas tłuczonego szkła (czujki aktywne).
4.11.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaka funkcję pełnią układy sygnalizacji?
2. Jaki jest cel stosowania zabezpieczeń automatycznych?
3. W jaki sposób informacja o zaistniałym zdarzeniu jest sygnalizowana operatorowi
procesu?
4. Jak klasyfikujemy systemy alarmowe ze względu na zagrożenia?
5. Jakie wymagania powinny spełniać czujniki antywłamaniowe i od czego one zależą?
6. Na jakiej zasadzie działają czujki stosowane do wykrywania ruchu?
7. Na jakiej zasadzie działają czujki tłuczonej szyby?
8. Jakie układy stosuje się w systemach zabezpieczeń urządzeń powszechnego użytku?
9. Jakie układy stosuje się dla zapewnienia bezpieczeństwa przeciwpożarowego?
10. Jakie czujniki stosowane są w instalacjach elektrycznych w celu ochrony przed
porażeniem?
11. Jak działa układ nadzoru płomienia pilotującego?
12. W jaki sposób odbywa się ponowny rozruch układu zabezpieczającego przed wypływem
nie spalonego gazu?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
75
4.11.3. Ćwiczenia
Ćwiczenie 1
Zbadaj zabezpieczenia zwarciowe i przeciążenowe w układach zasilających ze
stabilizacją napięcia.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przygotować stanowisko do pracy,
2) zapoznać się z opisem oraz danymi technicznymi regulowanego zasilacza
stabilizowanego,
3) zmontować układ do pomiaru napięcia wyjściowego przy U
we
= const,
4) wykonać pomiary dla dwóch różnych wartości U
we
,
5) wyniki pomiarów zestawić w tabelce,
6) narysować wykresy zmian U
wy
= f(I
wy
) dla dwóch różnych wartości U
we
,
7) opracować wyniki,
8) dokonać oceny zadziałania zabezpieczenia zwarciowego i przeciążeniowego,
9) zaprezentować ćwiczenie.
Wyposażenie stanowiska pracy:
zasilacz laboratoryjny regulowany z miernikiem napięcia i prądu,
—
multimer U / I / DC–2 szt.,
—
rezystor regulowany 150 Ω/2 A,
—
zestaw przewodów połączeniowych,
—
instrukcja zasilacza, karta katalogowa,
—
materiały i przybory do pisania,
—
literatura wskazana przez nauczyciela.
Ćwiczenie 2
Rozpoznaj czujki alarmowe. Określ ich dane techniczne oraz zasady instalacji.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przygotować stanowisko do pracy,
2) określić rodzaje czujek,
3) podać nazwę producenta,
4) podać ich dane techniczne,
5) porównać ceny poszczególnych czujek,
6) podać wymagania dotyczące montażu oraz warunki stosowania,
7) określić zasadę ich działania,
8) zaprezentować efekty swojej pracy,
9) dokonać oceny ćwiczenia.
Wyposażenie stanowiska pracy:
−
czujki: ruchu, dymu, wysokiej temperatury,
−
karty katalogowe,
−
komputer osobisty z dostępem do Internetu,
−
norma PN 93/E–08390: Systemy alarmowe,

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
76
−
kartki papieru A4
−
przybory do pisania,
−
literatura wskazana przez nauczyciela.
Ćwiczenie 3
Przygotuj prezentację multimedialną dotyczącą czujników jednego wybranego typu (np.
czujników dymu, czujników spalin, czujników ruchu, itp.). Powinna ona stanowić przegląd
dostępnych na rynku rozwiązań czujników oferowanych przez różnych producentów.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) dokonać poszukiwań w różnych źródłach informacji,
2) wykonać prezentację multimedialną w programie PowerPoint pakietu Microsoft Office,
3) dokonać prezentacji swojej pracy,
4) dokonać oceny ćwiczenia.
Wyposażenie stanowiska pracy:
−
katalogi, dokumentacja techniczna,
−
publikacje w specjalistycznych pismach,
−
komputer osobisty z dostępem do Internetu,
−
skaner,
−
dyskietka (płyta CD),
−
literatura wskazana przez nauczyciela.
4.11.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1)
wyjaśnić zasadę działania czujek ruchu?
2)
scharakteryzować zasady montażu urządzeń alarmowych?
3)
wyjaśnić zasadę działania układu nadzoru płomienia pilotującego?
4)
wskazać układy zabezpieczające w sprzęcie gospodarstwa domowego?
5)
podać jakie zabezpieczenie przeciwzwarciowe i przeciążeniowe
zastosowano w regulowanym zasilaczu stabilizowanym?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
77
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Test zawiera 20 zadań o różnym stopniu trudności: zadania 5, 6, 8 i 15 są z poziomu
ponadpodstawowego, a pozostałe – z poziomu podstawowego. Wszystkie zadania są
zadaniami wielokrotnego wyboru i tylko jedna odpowiedź jest prawidłowa.
5. Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi – zaznacz prawidłową
odpowiedź znakiem X (w przypadku pomyłki należy błędną odpowiedź zaznaczyć
kółkiem, a następnie ponownie zakreślić odpowiedź prawidłową).
6. Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
7. Kiedy udzielenie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż jego
rozwiązanie na później i wróć do niego, gdy zostanie Ci czas wolny. Trudności mogą
przysporzyć Ci zadania: 5, 6, 8 i 15, gdyż są one na poziomie trudniejszym niż pozostałe.
Przeznacz na ich rozwiązanie więcej czasu.
8. Na rozwiązanie testu masz 40 minut.
Powodzenia!
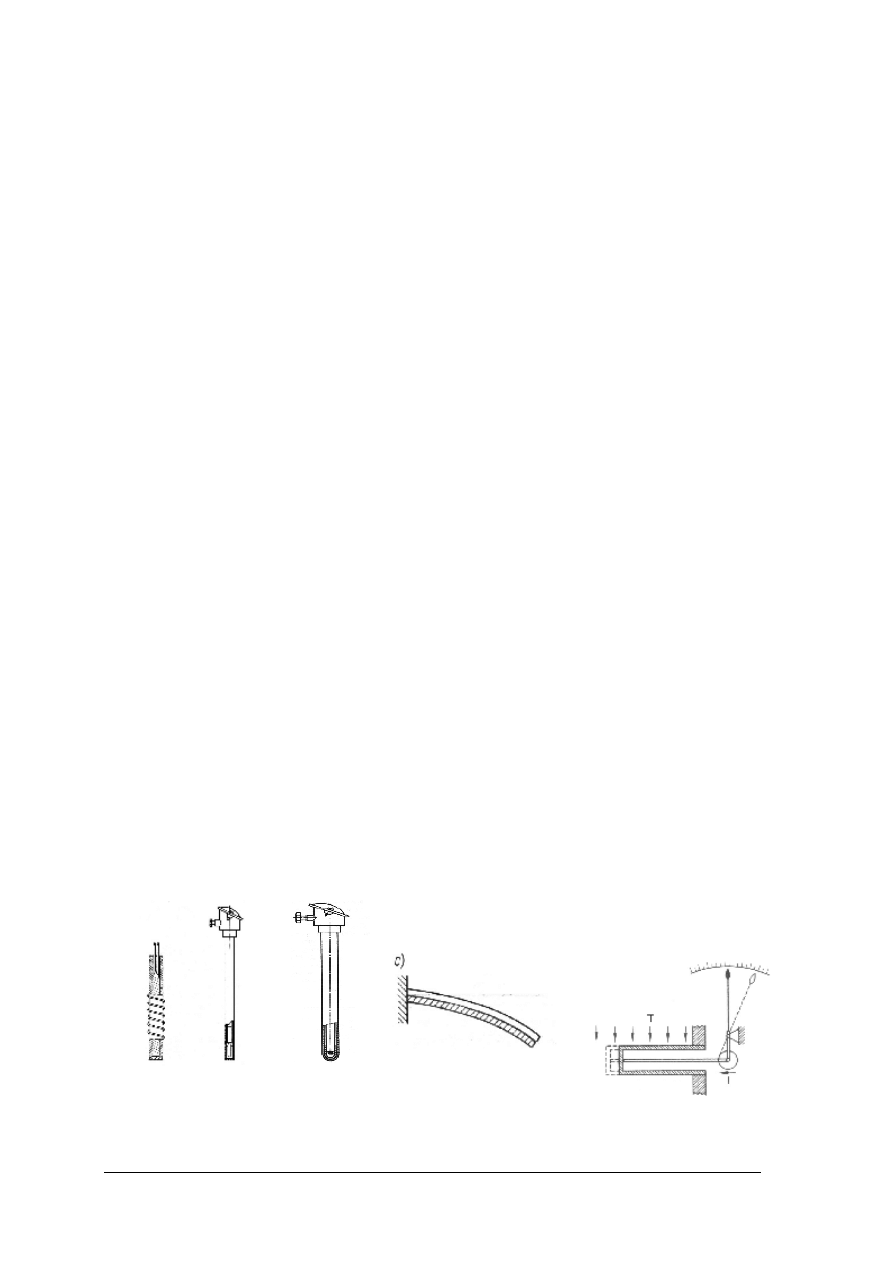
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
78
ZESTAW ZADAŃ TESTOWYCH
1. Standardowym sygnałem elektrycznym nie jest sygnał
a) 0–5 mA.
b) 20–100 mA.
c) 0–20 mA.
d) 4–20 mA.
2. Czujki pyroelektryczne służą do
a) wykrywania obecności człowieka.
b) wykrywania spalin.
c) ochrony drzwi i okien.
d) sygnalizacji pożaru.
3. Sygnałem pneumatycznym standardowym jest sygnał o wartości z zakresu
a) 0–50 kPa.
b) 0–100 kPa.
c) 10–100 kPa.
d) 20–100 kPa.
4. Do elementów automatyki nie zalicza się
a) przekaźnika.
b) silnika.
c) zaworu.
d) stacyjki komputerowej.
5. Regulatory które sprowadzają uchyb regulacji w stanie ustalonym do zera to
a) P i PI.
b) P i PD.
c) PI i PID.
d) PI i PD.
6. Czujniki do pomiaru temperatury które wykorzystują zjawisko powstania siły
termoelektrycznej pod wpływem zmiany temperatury to
a)
b)
d)
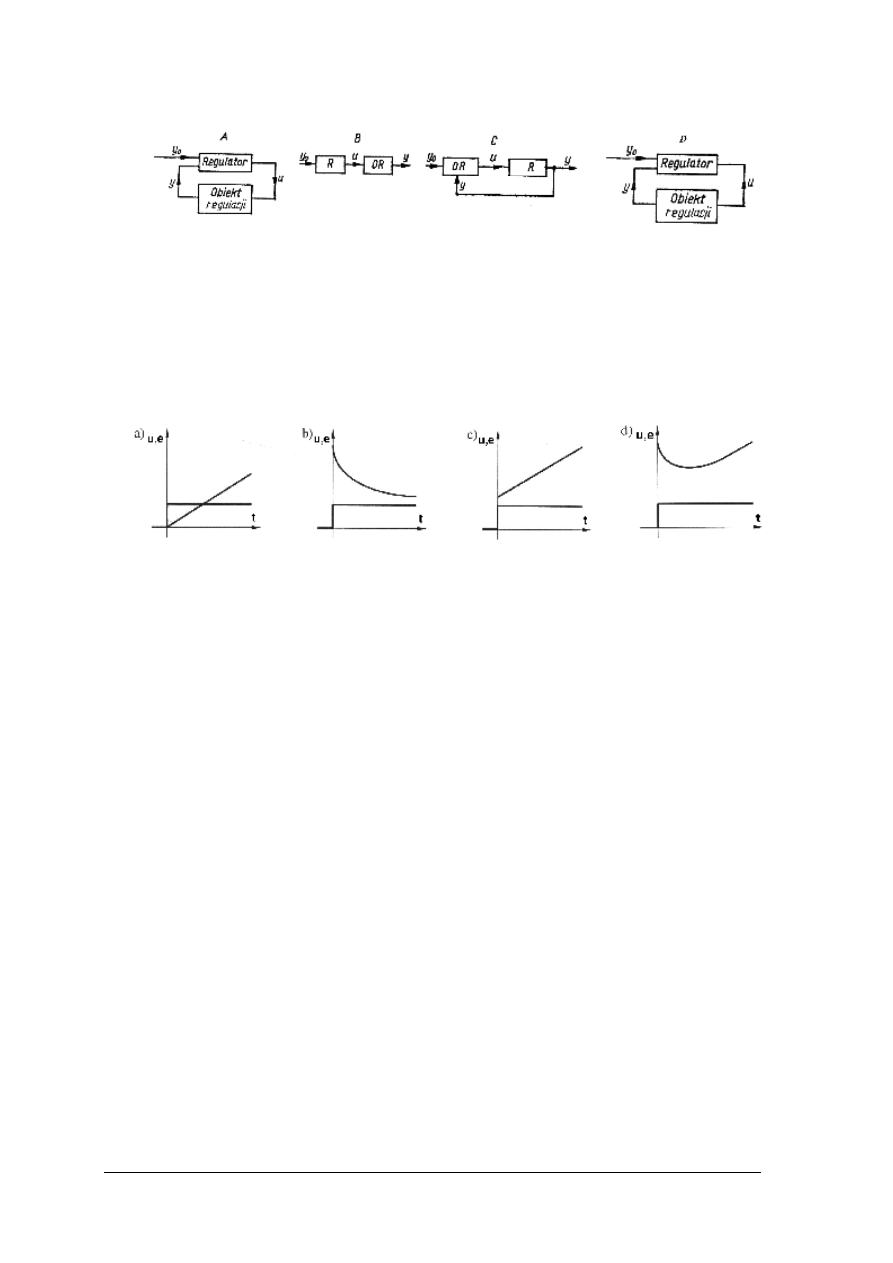
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
79
7. Wskaż schemat, przedstawiający układ regulacji automatycznej
8. Pozycjonowanie (regulacja położenia) sań suportu narzędziowego tokarki jest zadaniem
sterowania
a) stałowartościowego.
b) sekwencyjnego.
c) ekstremalnego.
d) nadążnego.
9. Charakterystykę dynamiczną regulatora PID przedstawia rysunek
10. Do urządzeń automatyki zalicza się
a) wzmacniacz.
b) prądnicę.
c) regulator.
d) siłownik.
11. Zadanie sterowania realizowane przez termostat to
a) optymalizacja przy zmiennych warunkach zewnętrznych.
b) śledzenie i wykonanie programu.
c) utrzymywanie punktu pracy zapewniającego maksimum wartości temperatury.
d) utrzymanie stałej wartości temperatury.
12. Układem regulacji dwustawnej nie jest układ
a) regulacji temperatury żelazka.
b) regulacji poziomu cieczy w zbiorniku.
c) regulacji silnika elektrycznego służącego do przestawiania zaworów.
d) regulacji temperatury w chłodziarce.
13. Pojęcie regulacji dwustawnej odnosi się do sygnału
a) zadanego.
b) odchyłki błędu.
c) sterującego.
d) regulowanego.
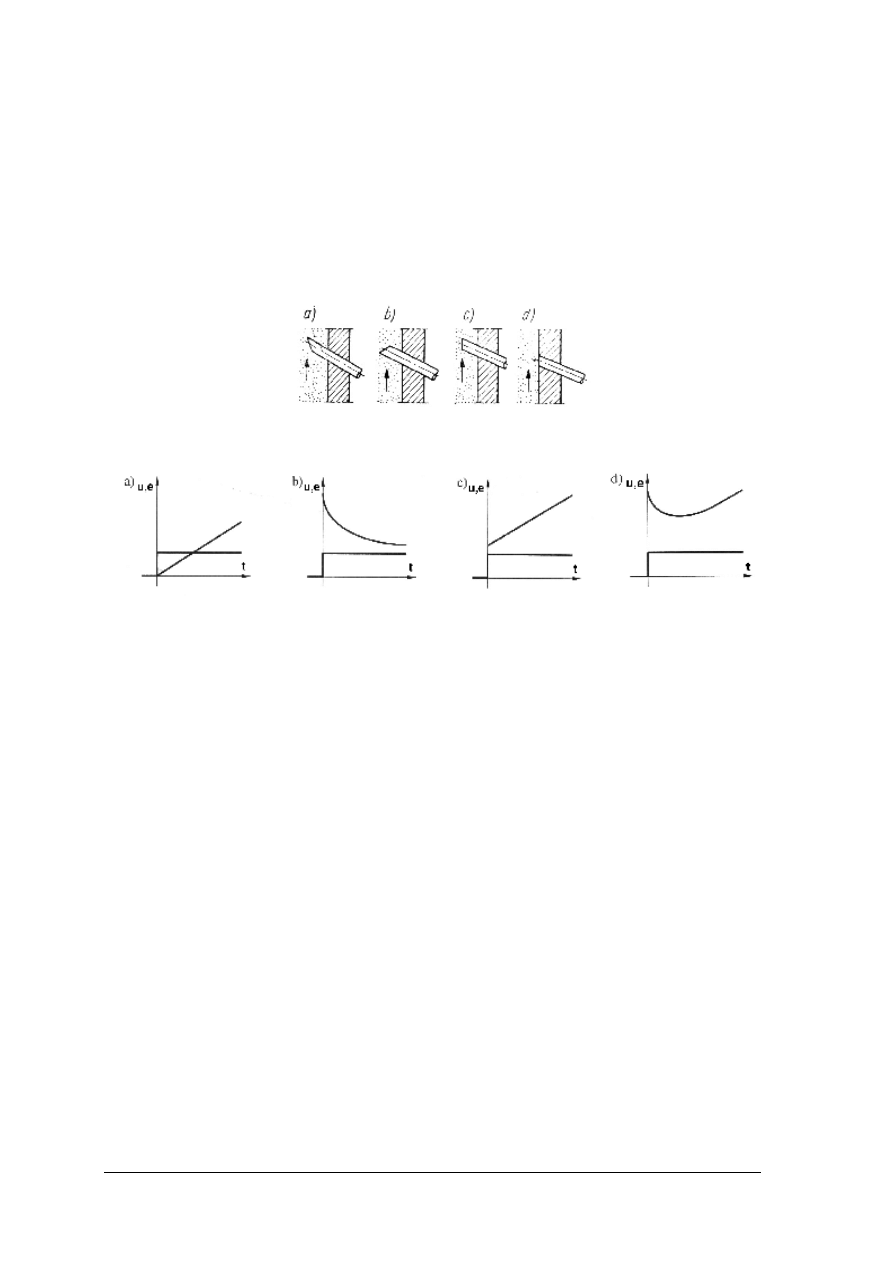
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
80
14. Zasilacz stabilizowany realizuje zadanie sterowania
a) realizacji zadanego algorytmu zmiany napięcia.
b) optymalizacji przy zmiennych warunkach zewnętrznych.
c) nadążnego.
d) utrzymania stałej wartości napięcia.
15. Zakończenie przewodu sygnałowego przedstawione na rysunku, które jest prawidłowe,
gdy mierzonym medium są spalin to
16. Przebieg, który z przedstawia regulator PD to
17. Systemy pneumatyczne umożliwiają przesył sygnału na odległość do
a) 1 km.
b) 300 m.
c) 3 km.
d) 1,5 km.
18. Organ pomiarowy przetwarza
a) wielkość zadaną.
b) wielkość regulowaną na sygnał napięciowy.
c) wielkość zadaną na sygnał prądowy.
d) wielkość regulowaną na sygnał dogodny do wprowadzenia do regulatora.
19. Sygnały, które zapewniają większą odporność na zakłócenia to sygnały:
a) napięciowe:–5–+ 5 V.
b) napięciowe: 0–10 V.
c) napięciowe: 0–5 V.
d) prądowe: 4–20 mA.
20. Organ wykonawczy nie składa się
a) ze wzmacniacza mocy.
b) z urządzenia pomiarowego.
c) z elementu napędowego.
d) z elementu nastawczego.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
81
KARTA ODPOWIEDZI
Imię i nazwisko ……………………………………………………..
Instalowanie
urządzeń
automatyki
i
obsługa
prostych
układów
automatycznej regulacji
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
82
6. LITERATURA
1. Dębski S.: Pracownia automatyki dla zasadniczych szkół zawodowych. PWSZ,
Warszawa 1973
2. Findeisen Wł. (red.): Poradnik inżyniera automatyka. WNT, Warszawa 1973
3. Hörnemann E., Hübscher H., Klaue J., Schierack K., Stolzenburg R.: Elektrotechnika.
Instalacje elektryczne i elektronika przemysłowa. WSiP, Warszawa 1998
4. Komor Z.: Pracownia automatyki. WSiP, Warszawa 1996
5. Kordowicz–Sot A.: Automatyka i robotyka. Elementy aparatury kontrolno pomiarowej.
WSiP, Warszawa 1999
6. Kordowicz–Sot A.: Automatyka i robotyka. Układy regulacji automatycznej. WSiP,
Warszawa 1999
7. Kostro J.: Elementy, urządzenia i układy automatyki. WSiP, Warszawa 1997
8. Marusak A.: Urządzenia elektroniczne. Cz. III. Budowa i działanie urządzeń. WSiP,
Warszawa 2000
9. Płoszajski G.: Automatyka. WSiP, Warszawa 1995
10. Pułaczewski J.: Automatyka. PWSZ, Warszawa 1969
11. Pułaczewski J.: Automatyka w przemyśle chemicznym. WSiP, Warszawa 1975
12. Schmid D. (red): Mechatronika. REA, Warszawa 2002
13. Siemianko Fr., Gawrysiak M.: Automatyka i robotyka. WSiP, Warszawa 1996
14. Technika sterowników z programowalną pamięcią. WSiP, Warszawa 1998
15. Technika sterowników z programowalną pamięcią. Ćwiczenia. WSiP, Warszawa 1998
16. Katalog Dacpolu. Podzespoły do automatyki. 2006
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron