104 Â
WIAT
N
AUKI
Grudzieƒ 1997
O
ceany zajmujà dwie trzecie po-
wierzchni Ziemi i sà domem
wi´kszoÊci organizmów ˝y-
wych naszej planety. Jednak ludzkie
mo˝liwoÊci poznawania tego Êrodowi-
ska sà bardzo ograniczone. P∏etwonur-
kowie, schodzàc najwy˝ej na 50 m, za-
ledwie muskajà jego powierzchni´. Dro-
ga do najwi´kszych g∏´bin jest 225 razy
d∏u˝sza. Oko∏o pó∏ tuzina nie najm∏od-
szych ju˝ podwodnych pojazdów za∏o-
gowych potrafi pokonaç niewiele po-
nad jej po∏ow´; tylko kilka sond i zdalnie
sterowanych kamer mo˝e zanurzyç si´
g∏´biej. W 1960 roku pilotowany baty-
skaf Trieste osiàgnà∏ w Rowie Mariaƒ-
skim 11 275 m, dziÊ jednak tylko nowy
japoƒski robot podwodny Kaiko mo˝e
mu dorównaç.
Tym, co utrudnia eksploracj´ g∏´bin
i czyni podwodne królestwo tak obcym,
jest podstawowa w∏asnoÊç wody: jej du-
˝a g´stoÊç. CiÊnienie roÊnie liniowo
wraz z g∏´bokoÊcià, osiàgajàc w najni˝-
szym punkcie zawrotnà wartoÊç 1200
atmosfer. Trieste, opuszczajàc si´ na dno
Rowu Mariaƒskiego, musia∏ mieç wi´c
ci´˝ki, kulisty, stalowy, odporny na ci-
Ênienie kad∏ub, w którym dla zapew-
nienia p∏ywalnoÊci musia∏y si´ znajdo-
waç du˝e zbiorniki wype∏nione lekkà
cieczà. Gdy statek przemieszcza si´ pod
wodà z pr´dkoÊcià umo˝liwiajàcà po-
konywanie w rozsàdnym czasie du˝ych
dystansów, jego ruch hamujà ponadto
opory hydrodynamiczne. Dzisiejsze jed-
nostki podwodne sà tak powolne, ˝e
przep∏yni´cie paru kilometrów w gór´
czy w dó∏ zajmuje im kilka godzin; po-
za tym muszà byç transportowane i ob-
s∏ugiwane ze specjalnie zaprojektowa-
nych statków baz.
Aby pokonaç te ograniczenia, wi´k-
szoÊç naukowców zajmujàcych si´ eks-
ploracjà g∏´bin odchodzi od idei stat-
ków za∏ogowych na rzecz podwodnych
robotów. Sondami na uwi´zi, zwanymi
zdalnie sterowanymi pojazdami (remo-
tely operated vehicles – ROV), i ma-
∏ymi, sterowanymi komputerowo, za-
silanymi z akumulatorów, autono-
micznymi pojazdami podwodnymi
(autonomous underwater vehicles –
AUV) mo˝na kierowaç z dowolnego
statku bez nara˝ania si´ na niebezpie-
czeƒstwo. Ponadto sà one stosunkowo
tanie. Na platformach wiertniczych
ROV sta∏y si´ ju˝ narz´dziem tak po-
wszechnie u˝ywanym, ˝e wzgl´dy eko-
nomiczne prawdopodobnie przesàdzà
o ca∏kowitym wyparciu tradycyjnych
statków za∏ogowych.
Jednak utrata szansy samodzielnej
eksploracji g∏´bin by∏aby niepowetowa-
nà stratà. Pomijajàc kwesti´, czy robot
mo˝e wykonaç niektóre prace równie
dobrze jak cz∏owiek, to jak zaspokoimy
swojà ˝àdz´ przygód? Wydaje si´ wi´c,
˝e dalszy post´p w doskonaleniu pod-
wodnych pojazdów za∏ogowych jest jak
najbardziej celowy – nie po to, aby zastà-
piç ROV czy AUV, lecz aby stworzyç
konstrukcje pozwalajàce dotrzeç w g∏´-
biny ludziom.
G∏´binowe „loty”
Program Deep Flight jest próbà prze-
zwyci´˝enia ograniczeƒ i stworzenia no-
wej generacji lekkich i ekonomicznych
za∏ogowych pojazdów podwodnych
operujàcych ze statków badawczych lub
transportowych. Deep Flight I zbudowa-
∏em z kolegami jako model czysto eks-
perymentalny. ChcieliÊmy sprawdziç
nowe rozwiàzania, które mia∏y podnieÊç
wydajnoÊç hydrodynamicznà statków,
oraz przetestowaç systemy pozwalajàce
na miniaturyzacj´ ogromnych jednostek
podwodnych. Korzystajàc ze zdobytych
doÊwiadczeƒ, pracujemy teraz nad Deep
Flight II – bardziej praktycznym mo-
delem, który mamy nadziej´, móg∏by
zabraç cz∏owieka w najg∏´bsze rejony
oceanu.
To, co przede wszystkim odró˝nia
Deep Flight od tradycyjnego okr´tu
podwodnego, nie jest ˝adnà ekstrawa-
gancjà, lecz rozwiàzaniem technicznym
majàcym na celu zwi´kszenie pr´dkoÊci
Dotrzeç jak najg∏´biej
Ma∏e, dajàce si´ ∏atwo kierowaç, autonomiczne
– byç mo˝e takie pojazdy podwodne zabiorà kiedyÊ cz∏owieka na dno oceanu
Graham S. Hawkes
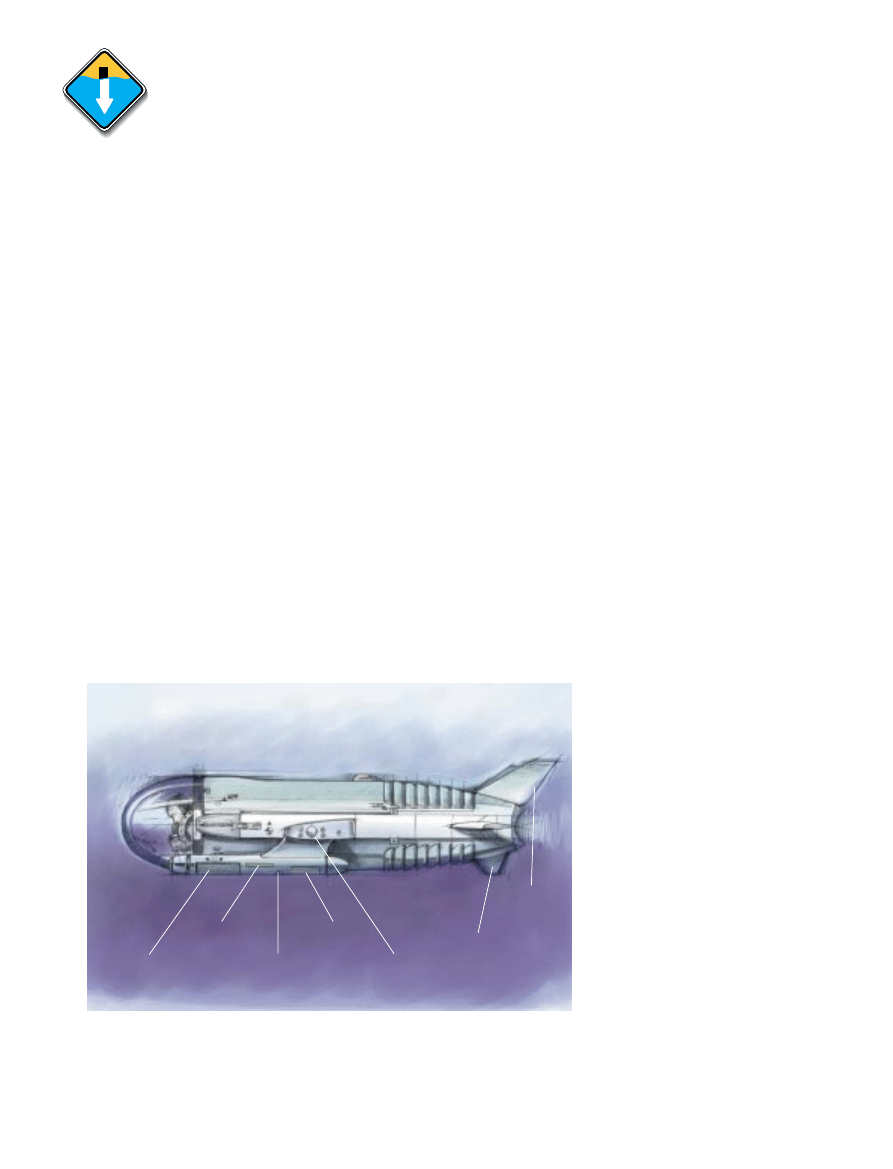
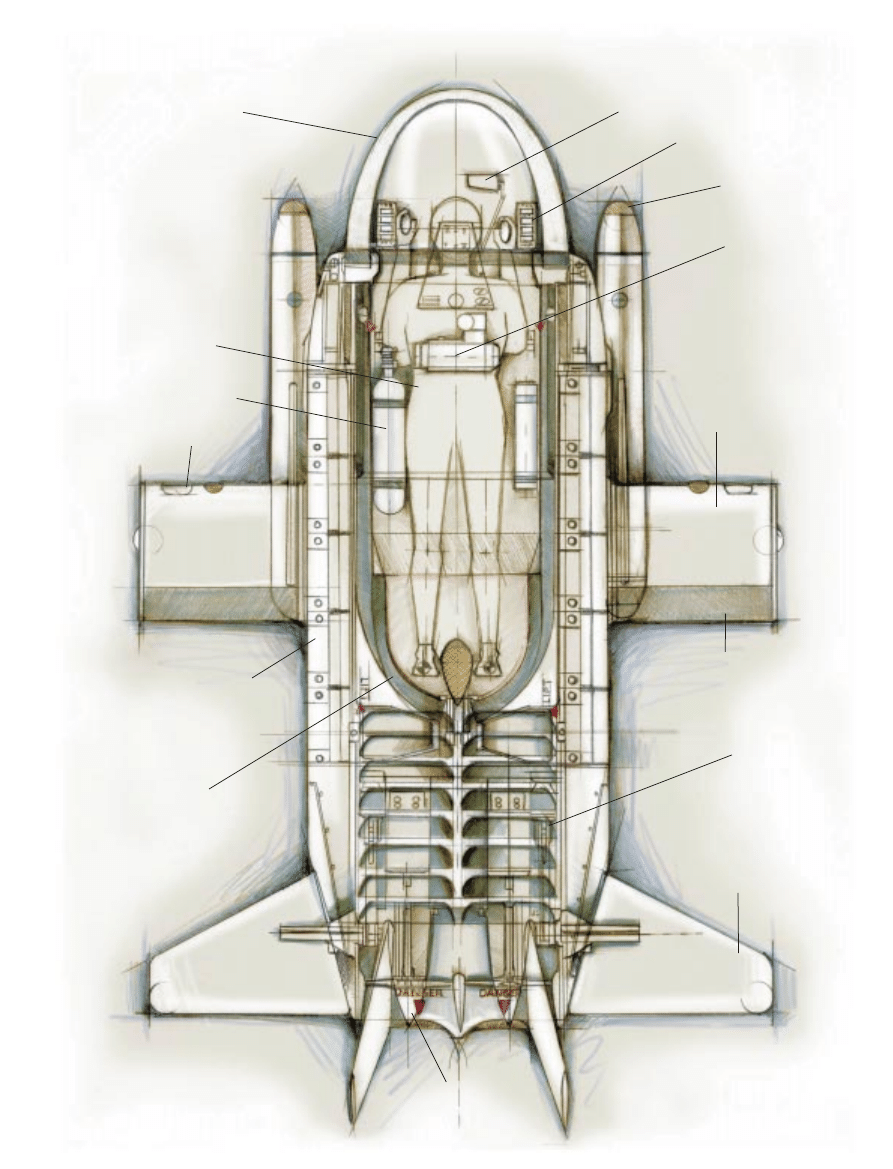
W EKSPERYMENTALNEJ ¸ODZI PODWODNEJ (powy˝ej i na sàsiedniej stronie) zastoso-
wano rozwiàzania zarówno oryginalne, jak i przej´te z innych projektów, których celem
jest zmniejszenie rozmiarów statku i polepszenie jego w∏asnoÊci manewrowych. Zaprojek-
towany przez autora tego artyku∏u 3.5-metrowy eksperymentalny model Deep Flight I mo-
˝e zabraç swojego pilota na g∏´bokoÊç nawet 1000 m.
OBCIÑ˚ENIE
AWARYJNE
SONAR
BOCZNY
ÂWIAT¸A
P¸ETWY
OS¸ONOWE
STATECZNIK
PIONOWY
LAMPA
B¸YSKOWA
G¸¢BOKOÂCIOMIERZ
DANIELS & DANIELS
Â
WIAT
N
AUKI
Grudzieƒ 1997 105
AKRYLOWA KOPU¸A
MONITOR
ZAPASOWY
WYÂWIETLACZ KONTROLNY
SONAR PRZEDNI
KLIMATYZACJA
SKRZYD¸A
PILOT
ÂWIAT¸A
AKUMULATORY
USTAWIANE
KLAPY
SI¸OWNIKI
P¸ATÓW
STERUJÑCYCH
P¸ATY
STERUJÑCE
P¢DNIK
KAD¸UB CIÂNIENIOWY
WYKONANY Z ˚YWICY
EPOKSYDOWEJ
ZBIORNIKI Z TLENEM
DANIELS & DANIELS
statku. Poniewa˝ si∏y hydrodyna-
miczne rosnà z kwadratem, nato-
miast wymagana moc z szeÊcianem
pr´dkoÊci, zwi´kszenie pr´dkoÊci
z jednego do pi´ciu w´z∏ów wymaga
mniej wi´cej stukrotnie wi´kszej mo-
cy. Na razie jednak jej uzyskanie z
u˝yciem zasilania akumulatorowe-
go nie wydaje si´ mo˝liwe; wzrost
pr´dkoÊci trzeba osiàgnàç przez zre-
dukowanie oporu.
Deep Flight I, który mo˝e zejÊç na
g∏´bokoÊç 1000 m, pod wieloma
wzgl´dami bardziej przypomina
skafander do g∏´bokich nurkowaƒ
ni˝ ma∏à ∏ódê podwodnà. Ma on nie-
wielkà powierzchni´ czo∏owà, oczy-
wiÊcie op∏ywowy kszta∏t oraz skrzy-
d∏a (lub jak kto woli, p∏etwy) po-
dobnie jak samoloty, ptaki, delfiny i
wieloryby. Konstruujàc Deep Flight I,
odrzuci∏em tradycyjny element
batyskafów i ∏odzi podwodnych:
zmienny system p∏ywalnoÊci, który
umo˝liwia zmian´ ci´˝aru pozorne-
go i tym samym zanurzanie si´ lub
wynurzanie.
Deep Flight I utrzymuje niewielkà
dodatnià p∏ywalnoÊç przez ca∏y czas.
P∏ynàc, do zanurzania u˝ywa skrzy-
de∏ (które sà ustawione „do góry no-
gami” w porównaniu z samoloto-
wymi). Funkcj´ sterów pe∏nià ru-
chome skrzyd∏a na rufie. Pilot kieru-
je statkiem za pomocà delikatnych
ruchów niewielkich d˝ojstików ste-
rujàcych elektronicznym systemem
manewrowym. Dzi´ki wyd∏u˝one-
mu przezroczystemu akrylowemu
dziobowi nie widzi si´ w czasie p∏y-
wania konstrukcji statku – robi to nie-
samowite wra˝enie.
Najwi´kszym problemem by∏o
zmniejszenie rozmiarów niezb´dnej
aparatury, tak aby zmieÊci∏a si´ w nie-
wielkiej przestrzeni Deep Flighta. Z po-
mocà przysz∏y mikroprocesory: kilka
prze∏àczników daje w zasadzie nie-
ograniczonà kontrol´, a ogromnà licz-
b´ wyÊwietlaczy zast´puje monitor.
Stare technologie umierajà jednak d∏u-
go, na pok∏adzie wi´c znajdujà si´
jeszcze dwa cyfrowe wyÊwietlacze po-
kazujàce podstawowe parametry –
pomost mi´dzy wczoraj i dziÊ.
To, czym nasza konstrukcja szcze-
gólnie si´ wyró˝nia, jest chyba pozy-
cja pilota – jedynego cz∏onka za∏ogi;
nie siedzi on wyprostowany w fotelu,
lecz le˝y na brzuchu z g∏owà skiero-
wanà do przodu, przypi´ty do dopa-
sowanej do cia∏a niecki. Na poczàtku
takie ustawienie wydawa∏o si´ nie-
dobre, choç do zaakceptowania w
modelu eksperymentalnym. Nie wpa-
dliÊmy na to, ˝e skoro w∏aÊnie takà
pozycj´ przyjmujà ludzie i morskie
ssaki podczas nurkowania, powinna
ona byç naturalna i wygodna. Po
pierwszym pobycie w Deep Flight I
natychmiast zmieni∏em wszystkie
moje projekty statków podwodnych,
w których usi∏owa∏em zachowaç sie-
dzàcà, „prawid∏owà” pozycj´ pilota.
Aby jednak poprawiç komfort pilota
podczas zanurzania i wynurzania,
w Deep Flight II podnieÊliÊmy pozy-
cj´ cia∏a o 30 stopni.
Jeszcze g∏´biej
Czy konstrukcja hydrodynamicz-
na, która Êwietnie zda∏a egzamin na
stosunkowo niewielkich g∏´boko-
Êciach, na jakie zapuszcza∏ si´ Deep
Flight I, nie zawiedzie na wi´kszych,
do których jest przeznaczony Deep
Flight II? Na szcz´Êcie nie. Dodatkowa
g∏´bokoÊç i ciÊnienie nie zwi´kszajà
oporu – woda jest praktycznie nieÊci-
Êliwa, statek powinien wi´c si´ zacho-
wywaç tak samo, jak gdyby by∏ bli-
sko powierzchni.
Jednak kad∏ub b´dzie musia∏ wy-
trzymywaç wzrastajàce z g∏´bokoÊcià
ciÊnienie. Zastosowanie tradycyjnej
stalowej konstrukcji oznacza∏oby re-
zygnacj´ z korzyÊci, jakà daje ma∏a
masa. Wszystko wskazuje na to, ˝e
do budowy wysokociÊnieniowych ka-
d∏ubów b´dzie mo˝na u˝yç innych
materia∏ów. U.S. Navy przetestowa-
∏a kad∏uby z materia∏ów ceramicz-
nych nowej generacji – rezultat by∏
pozytywny. Ich wytrzyma∏oÊç jest
wystarczajàca, aby nadawa∏y si´ do
statków za∏ogowych. Ostatnio dane
dotyczàce projektu odtajniono, co
pozwoli prawdopodobnie na po-
wszechniejsze wprowadzenie tych
materia∏ów. Z powodu du˝ego ciÊnie-
nia trzeba b´dzie zastàpiç akrylowà
kopu∏´ bardziej tradycyjnymi otwo-
rami obserwacyjnymi.
Deep Flight II, zbudowany z najno-
woczeÊniejszych materia∏ów cera-
micznych i zawierajàcy rozwiàzania
sprawdzone w Deep Flight I, powi-
nien byç bardzo nowoczesnym i u˝y-
tecznym statkiem. By∏by, jak ja to na-
zywam, zarówno „inteligentny”, jak
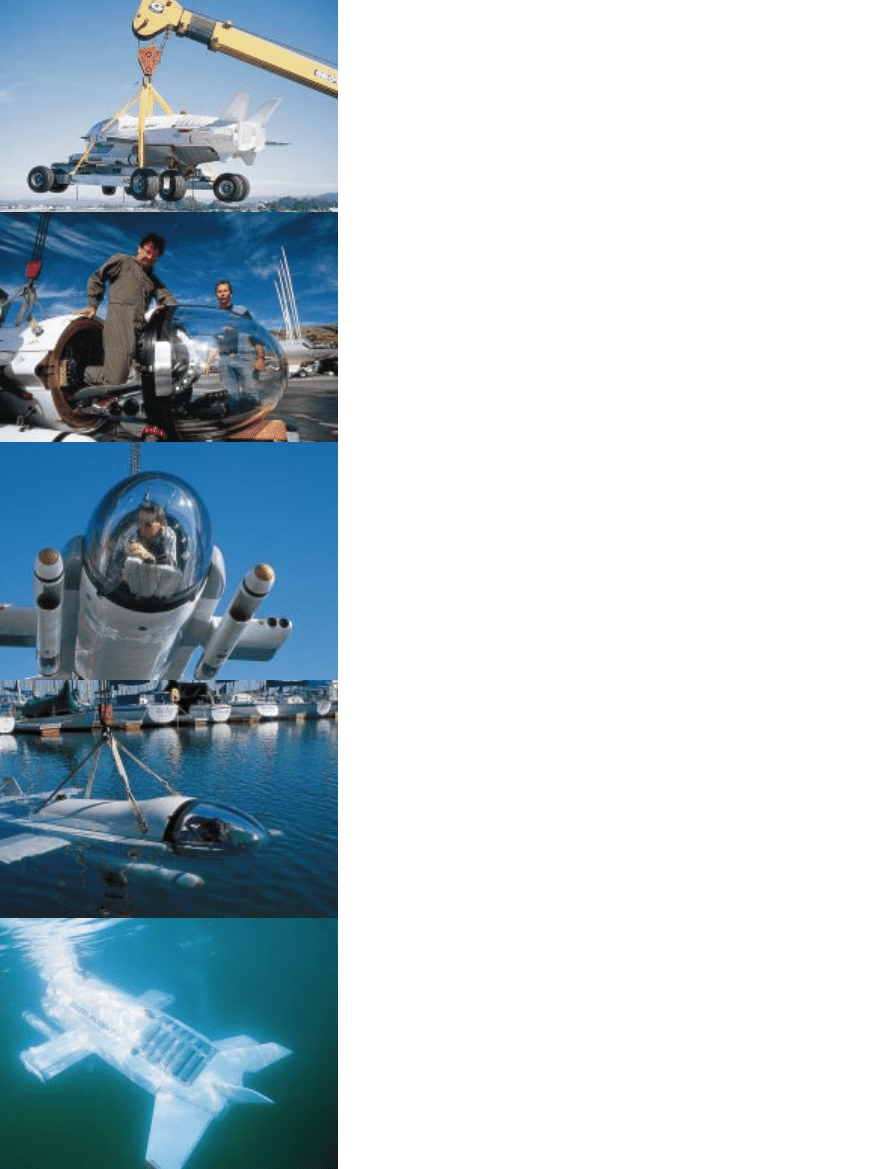
DEEP FLIGHT I na ramie transportowej
(1) jest ∏adowany na ci´˝arówk´, majàcà
go przewieêç na miejsce wodowania. Au-
tor wchodzi do pojazdu (2) zawieszone-
go na dêwigu (3), który spuszcza pojazd
do wody (4) w celu przeprowadzenia te-
stów. Pod wodà (5) dzi´ki akrylowej ko-
pule przed oczami pilota roztaczajà si´ za-
pierajàce dech w piersiach widoki (6).
Unoszàc si´ na powierzchni (7), pilot cze-
ka na wyciàgni´cie statku przez dêwig (8).
1
2
3
4
5
CHUCK DAVIS
AMOS NACHOUM PHOTGRAPHY
AMOS NACHOUM PHOTGRAPHY
AMOS NACHOUM PHOTGRAPHY
HAWKES OCEAN TECHNOLOGIES
i „autonomiczny”. AUV-y nie sà „in-
teligentne”, poniewa˝ to tylko robo-
ty, ROV-y natomiast nie sà autono-
miczne, poniewa˝ pracujà na uwi´zi.
Za cel jednak postawiliÊmy sobie nie
budow´ statku majàcego zastàpiç
AUV czy ROV, lecz takiego, który
zwi´kszy ich mo˝liwoÊci, pozwa-
lajàc na podró˝ w g∏´biny tak˝e
ludziom.
Z powodu ograniczonych fundu-
szy na tworzenie nowych statków
podwodnych Deep Flight musi byç
statkiem wielozadaniowym, spe∏nia-
jàcym ró˝norodne wymagania. Po-
winien byç na przyk∏ad zwinny i ci-
chy, aby nadawa∏ si´ do badaƒ bio-
logicznych, a tak˝e móg∏ s∏u˝yç geo-
logom jednoczeÊnie jako buldo˝er
i podwodna ci´˝arówka.
Aby sprostaç ró˝nym, cz´sto
sprzecznym wymaganiom, podsta-
wowa jednostka ma byç ∏atwym do
adaptacji zestawem modu∏owym. Po-
szczególne cz´Êci powinny dawaç si´
szybko ∏àczyç na pok∏adzie statku ba-
zy w trzy ró˝ne w zale˝noÊci od
potrzeb konstrukcje. Pierwsza by∏aby
jednoosobowà ∏odzià o jak najmniej-
szej masie i jak najbardziej op∏ywo-
wym kszta∏cie, przeznaczonà do ba-
daƒ i eksploracji. Druga – to dwa
po∏àczone ze sobà modu∏y jednooso-
bowe, przeznaczone do wypraw w
dwie osoby – jedna pilotowa∏aby,
druga natomiast zajmowa∏a si´ ob-
serwacjà. W trzeciej wreszcie wersji
Deep Flight II wykonywa∏by ci´˝sze
prace i sk∏ada∏by si´ z dwóch cz´Êci
z umieszczonym pomi´dzy nimi
zestawem roboczym. Zestaw taki
mia∏by pionowo skierowane p´dni-
ki, dzi´ki którym statek móg∏by po-
ruszaç si´ nad wybranym miejscem
podobnie do kolibra.
Tak jak wszystkie statki te rownie˝
b´dà mia∏y swoje ograniczenia. W
dajàcej si´ przewidzieç przysz∏oÊci
przeznaczone by by∏y wy∏àcznie na
potrzeby wypraw, na przyk∏ad na-
ukowych. Wydaje si´, ˝e jedynym ich
zastosowaniem do przewozu osób
móg∏by byç transport personelu mi´-
dzy podwodnymi instalacjami a po-
wierzchnià lub krótkie podwodne
wycieczki na niewielkich g∏´bokoÊ-
ciach. Statki te pozwolà jednak na
takie poznanie ˝ycia oceanów, jakie-
go nie umo˝liwi ˝aden robot. Sà szan-
sà dla tych, którzy chcieliby sami,
osobiÊcie i niezale˝nie, badaç „wiel-
ki b∏´kit”.
T∏umaczy∏
Grzegorz Kowalski
Informacje o autorze
GRAHAM S. HAWKES jest za∏o˝ycielem Hawkes Ocean Techno-
logies w San Anselmo (Kalifornia), zajmujàcego si´ projektowa-
niem konstrukcji do specjalnych zastosowaƒ. Jest tak˝e wicepreze-
sem za∏o˝onego przez siebie i Sylvi´ Earle w 1982 roku Deep Ocean
Engineering, firmy produkujàcej stosowane na ca∏ym Êwiecie stat-
ki roboty.
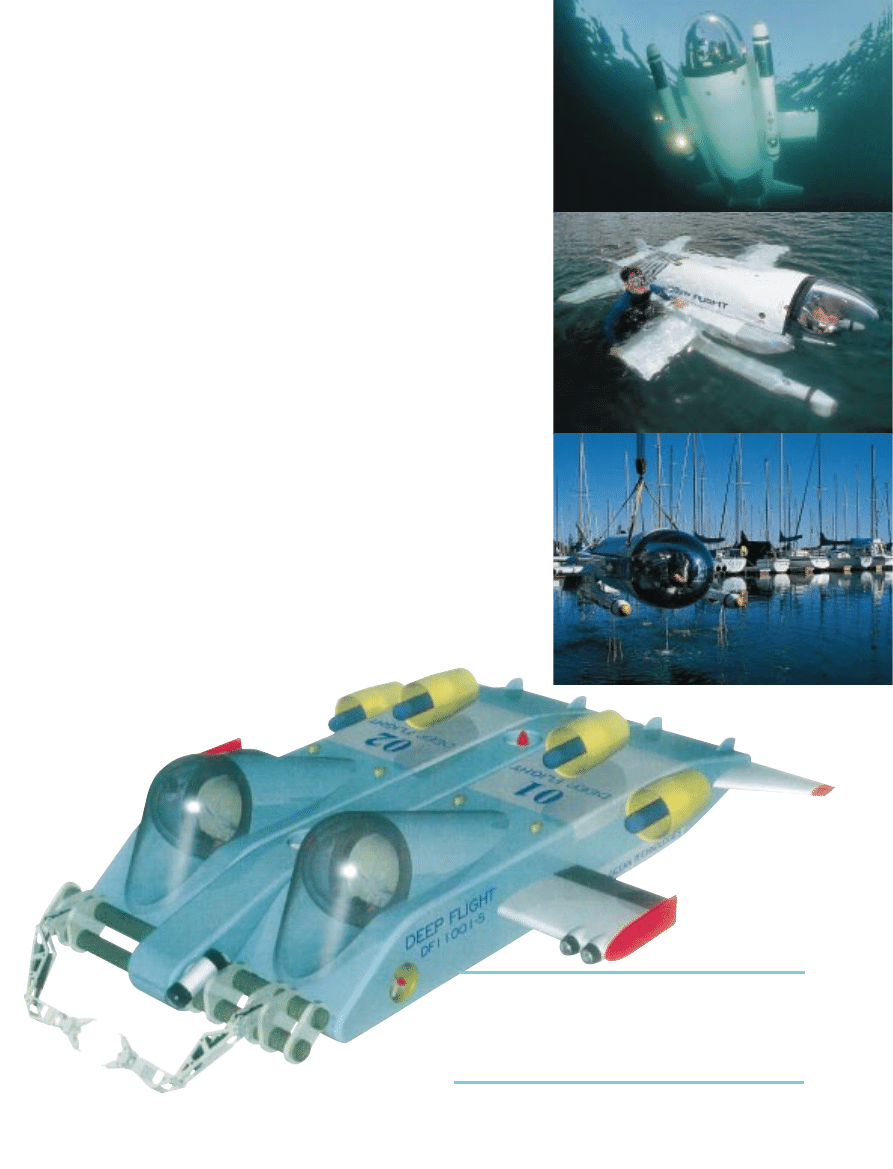
NAST¢PNA GENERACJA statków
Deep Flight pozwoli podró˝owaç
znacznie g∏´biej, prawdopodobnie
nawet na 11 000 m. Mi´dzy dwiema
jednostkami b´dzie mo˝na umiesz-
czaç modu∏y robocze, jak pokazano
na rysunku.
6
7
8
CHUCK DAVIS
AMOS NACHOUM PHOTGRAPHY
AMOS NACHOUM PHOTGRAPHY
HAWKES OCEAN TECHNOLOGIES
Â
WIAT
N
AUKI
Grudzieƒ 1997 107
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron