
Ć w i c z e n i e 36
WYZNACZANIE MOMENTU BEZWŁADNOŚCI BRYŁY Z
WYKORZYSTANIEM MASZYNY ATWOODA
36.1. Wstęp teoretyczny
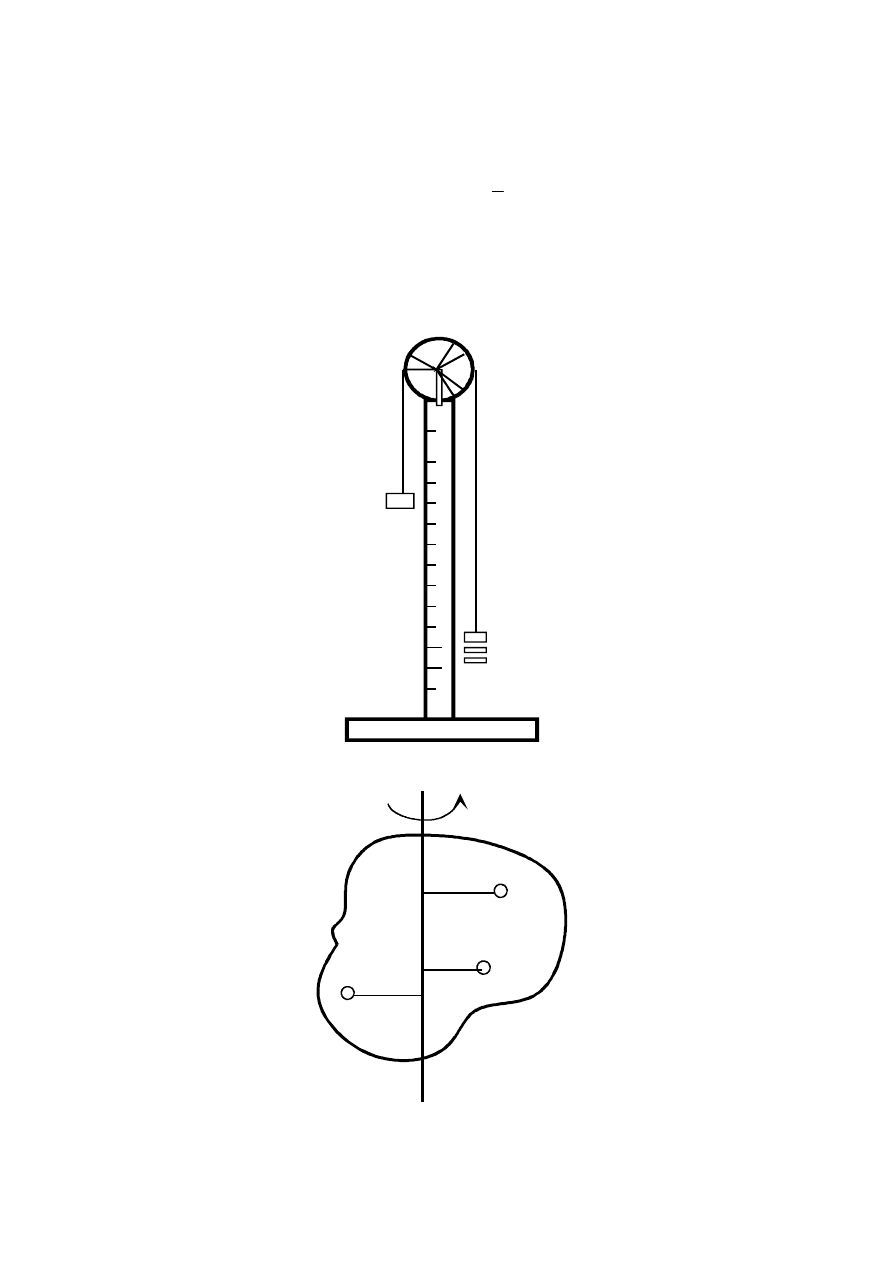
Maszyna Atwooda służy do doświadczalnego sprawdzania praw kinematyki i dynamiki. W naj-
prostszym wykonaniu składa się ona z bloczka K (rys.36.1) umieszczonego w górne części piono-
wego pręta ze skalą S. Przez bloczek przechodzi cienka i mocna nić z zawieszonymi na końcach
masami M. Dodatkowe obciążenie jednego z końców nici jest realizowane za pomocą jednakowych
blaszek o masie m każda w ilości k. Właśnie ich ciężar jest przyczyną wprowadzającą układ ciężar-
ki-nić-bloczek w ruch jednostajnie przyśpieszony.
W maszynie Atwooda mamy do czynienia z dwoma rodzajami ruchu jednostajnie przyśpieszonego:
prostoliniowym ciężarków i obrotowym bloczka.
• W ruchu prostoliniowym bezwładność ciała charakteryzowana jest przez jego masę m.
Znajduje to odzwierciedlenie w drugiej zasadzie dynamiki dla tego ruchu, zgodnie z którą siła
F nadaje ciału ruch o przyśpieszeniu a wprost proporcjonalnym do tej siły i odwrotnie pro-
porcjonalnym do masy ciała:
a
F
m
=
• W ruchu obrotowym bezwładność ciała charakteryzowana jest przez jego moment bezwład-
ności J względem osi obrotu. Znajduje to odzwierciedlenie w drugiej zasadzie dynamiki dla
tego ruchu, zgodnie z którą moment siły N nadaje ciału ruch o przyśpieszeniu kątowym
ε
wprost proporcjonalnym do momentu siły i odwrotnie proporcjonalnym do momentu bez-
władności:
ε =
N
J
Zdefiniujmy moment bezwładności bryły sztywnej. Załóżmy, że bryła obraca się wokół osi l ze sta-
łą prędkością kątową
ω
i że składa się z n mas punktowych m
i
(rys. 36.2). Każda z tych mas posia-
da prędkość liniową v
i
zależną od jej odległości od osi obrotu r
i
:
v
r
i
i
= ω
oraz energię kinetyczną:
2
2
i
i
2
i
i
ki
ω
r
m
2
1
v
m
2
1
E
=
=
Energia kinetyczna całej bryły jest sumą energii kinetycznych poszczególnych mas punktowych:
∑
∑
=
=
=
=
n
1
i
2
i
i
2
n
1
i
ki
kO
r
m
ω
2
1
E
E
(36.1)
Porównajmy ten wzór z wyrażeniem na energię kinetyczną w ruchu postępowym:
E
m v
kp
=
1
2
2
Wiemy, że odpowiednikiem prędkości liniowej v jest prędkość kątowa
ω
, a masy m - moment
bezwładności J.
Wzór na energię kinetyczną w ruchu obrotowym powinien mieć postać :
E
J
kO
=
1
2
2
ω
(36.2)
Z porównania wzorów (36.1) (36.2) wynika definicyjna zależność na moment bezwładności bryły
sztywnej:
∑
=
=
n
1
i
2
i
i
r
m
J
(36.3)
Rys. 36.1. Maszyna Atwooda.
Rys. 36.2. Bryła sztywna w ruchu obrotowym wokół osi L. Należy zauważyć, że
m
m
i
i
n
=
=
∑
1
.
S
B
A
K
L
ω
m
m
m
i
i
i
+
-
1
1
r
r
r +
i
i
1
i
-
1
Widać, że zależy on od wyboru osi obrotu oraz od sposobu rozłożenia masy ciała względem niej
(czyli od kształtu ciała).
Wychodząc z definicji (36.3) można teoretycznie obliczyć momenty bezwładności dla wielu regu-
larnych brył , uzależniając je od całkowitej masy m i od ich rozmiarów geometrycznych.
Na przy-
kład:
dla walca
J
m R
=
1
2
2
gdzie R - promień walca
dla
kuli
J
m R
=
2
5
2
gdzie R - promień kuli
dla
pierścienia
(
)
J
m R
R
=
+
1
2
1
2
2
2
gdzie R
1
, R
2
- promienie zewnętrzny i wewnętrzny
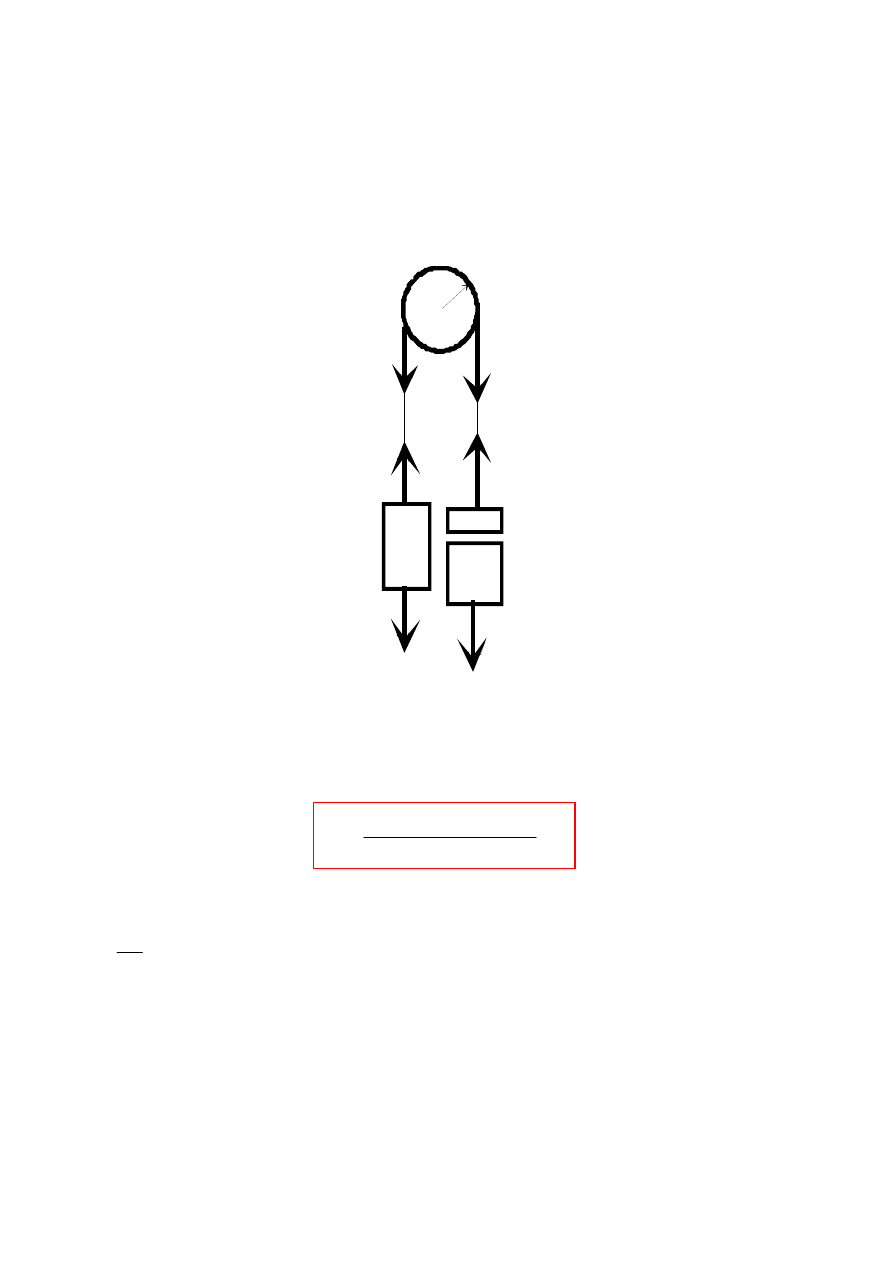
A n a l i z a r u c h u m a s z y n y A t w o o d a
Na ciężarek A działają siły: ciężkości Mg i naprężenia nici T
1
(rys. 36.3). Pod wpływem wypadko-
wej tych sił ciężarek porusza się do góry z przyśpieszeniem a. Zgodnie z II prawem Newtona dla
ruchu postępowego możemy napisać:
(
)
T
M g
M a
1
−
=
(36.4)
Podobnie ciężarek B będzie poruszał się (ale do dołu) pod wpływem wypadkowej siły ciężkości
równej Mg + kmg i siły naprężenia nici T
2
. Analogicznie zgodnie z II prawem Newtona dla ruchu
postępowego możemy napisać:
(
)
(
)
M k m g
T
M k m a
+
−
=
+
2
(36.5)
Przyśpieszenia obu ciężarków są jednakowe i wynoszą a, mają jednak inne zwroty, co już uwzględ-
niono w powyższych równaniach.
Siły naprężenia nici T
1
i T
2
działają prostopadle do promienia r bloczka. Wytwarzają więc wypad-
kowy moment siły równy
(
)
T
T r
2
1
−
, który będzie obracał krążek z przyśpieszeniem kątowym
ε
.
Zgodnie z II prawem Newtona dla ruchu obrotowego możemy napisać:
(
)
T
T r
J
2
1
−
= ε
(36.6)
Ze względu na zależność a =
ε
r otrzymujemy
(
)
T
T r
J
a
r
2
1
−
=
i stąd po przekształceniu:
(
)
T
T
J
r
a
2
1
2
−
=
(36.7)
Wyliczając T
1
i T
2
ze wzorów (36.4), (36.5) i wstawiając do powyższej zależności otrzymujemy
wyrażenie na przyśpieszenie w ruchu ciężarków w maszynie Atwooda :
a
k m g
J
r
M
k m
=
+
+
2
2
(36.8)
Z analizy tego wzoru wynika, że dla
k m
M
〈〈
przyśpieszenie a jest znacznie mniejsze od przy-
śpieszenia ziemskiego g. Fakt ten pozwala na łatwiejszy pomiar przyspieszenia układu przy stosun-
kowo niewielkiej wysokości przyrządu Atwooda, w odróżnieniu od pomiaru przyspieszenia przy
spadku swobodnym.
Otrzymanie dokładnych wyników jest uzależnione od możliwie mało obarczonych błędami pomia-
rów czasu. Do pomiarów czasu przy obserwacjach dokonywanych na maszynie Atwooda służą
szybkie
chronometry lub elektroniczne mierniki czasu.
Rys. 36.3. Siły działające na ciężarki i bloczek w maszynie Atwooda.
W ćwiczeniu dokonuje się pomiaru przyśpieszenia a, co pozwala na wyznaczenie momentu bez-
władności bloczka K:
J
k m g
M a
k m a
a
r
=
−
−
2
2
(36.9)
Przyśpieszenie a wyznaczamy mierząc czas t , w którym ciężarki pokonują stałą drogę S. Ponieważ
ciężarki rozpoczynają ruch bez prędkości początkowej, przyśpieszenie a wyznaczamy z zależności
a
S
t
=
2
2
.
Umieszczając na osi bloczka dodatkowe ciało (w ćwiczeniu metalowy pierścień), korzystając z wy-
prowadzonych zależności, można wyznaczyć moment bezwładności J
C
, będący sumą momentu
bezwładności bloczka J
U
, i dołożonego ciała J
b
. Szukany moment bezwładności jest więc równy
różnicy:
J
J
J
b
C
U
=
−
(36.10)
r
T
T
T
T
1
2
1
2
A
B
M
Mg
g
+ kmg
36.2. Opis układu pomiarowego
Do sterowania maszyną Atwooda służy elektroniczny blok zasilająco-pomiarowy „Polydigit 1”.
Sprzężony on jest z elektromagnesem wyzwalającym ruch ciężarków oraz z dwoma fotokomórka-
mi. Dzięki temu pomiar czasu spadku ciężarków na określonej drodze odbywa się elektronicznie.
Blok „Polydigit 1” jest wyposażony w sześć dwupozycyjnych przycisków. W ćwiczeniu używane
są tylko cztery z nich (numeracja od lewej do prawej):
1)
Włącznik bloku.
2) Czerwony, opisany „Null” - służy do zerowania zegara.
3) Opisany „1000Hz” - określa dokładność zegara - podczas wykonania pomiarów musi być
stale wciśnięty.
4) Opisany „Messen” - służy do sterowania elektromagnesem. W górnej pozycji elektroma-
gnes jest włączony, a w dolnej wyłączony.
Ciężarki A i B mają jednakową masę M. Na ciężarek B mogą być nakładane blaszki o znanej ma-
sie m
o.
Przed każdym pomiarem ciężarek A utrzymywany jest przez elektromagnes (przycisk 6 nie
jest wciśnięty). Wciśnięcie przycisku 6 powoduje wyłączenie prądu płynącego przez elektromagnes
i rozpoczęcie ruchu ciężarków, jeżeli na ciężarek B nałożona jest co najmniej jedna blaszka. Przy-
cisk 6 włącza jednocześnie zegar elektroniczny, który mierzy czas pomiędzy wyłączeniem prądu
elektromagnesu a przecięciem przez ciężarek B światła padającego na fotokomórkę. Drogę ruchu
ciężarków zmieniamy poprzez położenie fotokomórki.
Do osi bloczka można przymocować metalowy pierścień, którego moment bezwładności należy
wyznaczyć.
Parametry układu:
Parametry pierścienia:
r
mm
M
g
m
g
=
±
=
±
=
±
98 1
2
507 1
15 3 0 1
,
,
m
g
R
mm
R
mm
p
=
±
=
±
=
±
2001 1
100 0 5
164 0 5
1
2
,
,
36.3. Przebieg pomiarów
1. Zaznajomić się z działaniem układu pomiarowego.
2. Włączyć „Polydigit 1” przez wciśnięcie przycisku (1), przycisku 1000 Hz i przycisku „Sieć” w
zasilaczu (6V, 50 Hz) żarówek fotokomórek. Obciążyć ciężarek B czterema blaszkami.
3. Ciężarek A opuścić do zetknięcia się z elektromagnesem.
4. Opuścić fotokomórkę (kręcąc korbą) na odległość S (90 cm). Zmierzyć tę odległość 10 razy.
Określić błąd pomiaru.
5. Przyciskiem „Messen” wyłączyć elektromagnes; jednocześnie włącza się pomiar czasu. W mo-
mencie przecięcia światła padającego na fotokomórkę przez ciężarek B pomiar czasu jest za-
trzymany i czas t przebycia drogi S jest wyświetlany na przyrządzie „Polydigit 1”. Czas ten za-
notować.
6. Pomiary punktów 3-5 wykonać piętnastokrotnie.
U w a g a :
Przesuwając ciężarek B do góry należy ominąć nim fotokomórkę !
7. Założyć na oś bloczka metalowy pierścień i powtórzyć pomiary wg punktów 3-6.

36.4. Opracowanie wyników pomiarów
1. Obliczyć średnią drogę spadku ciężarków
S
.
2. Dla obu serii pomiarowych ze średniego czasu
t
ruchu układu obliczyć jego przyspieszenia a .
3. Na podstawie wzoru (36.9) obliczyć wartości J
U
i J
C
.
4. Obliczyć moment bezwładności J
b
pierścienia (wzór 36.10).
5. Przy pomiarach popełniono błędy przypadkowe. Pomiary wykonywano 15 razy. Ta ilość jest
wystarczająca, żeby błędy oceniać zgodnie z rozkładem normalnym. Obliczyć odchylenia stan-
dardowe
σ
σ
S
t
i
.
6. Obliczyć średni błąd kwadratowy
σ
σ
a
J
i
b
(m, M, g przyjąć, że nie są obarczone błędami).
7. Obliczyć teoretycznie moment bezwładności pierścienia i porównać z wynikiem otrzymanym
doświadczalnie.
36.5. Pytania kontrolne
1. Sformułować II zasadę Newtona dla bryły w ruchu obrotowym.
2. Zdefiniować pojęcia: przyspieszenie kątowe, moment bezwładności, moment pędu.
3. Jak wyznaczyć przyspieszenie ziemskie oraz moment bezwładności układu za pomocą przyrządu
Atwooda?
L i t e r a t u r a
[1] Piekara A.: Mechanika ogólna. PWN, W-wa 1964.
[2] Szczeniowski S.: Fizyka doświadczalna, cz.I. Mechanika i akustyka, PWN, W-wa 1980.
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron