1
Praca i energia.
Ćwiczenia 11
dr inż. Monika Kwacz
Praca
Praca – źródła, efekt
Wstęp
Siły:
x
x
1
x
2
T
Efekt wykonanej pracy:
s
– przemieszczenie liniowe
Momenty sił:
r
F
M
z
Efekt wykonanej pracy:
j
– przemieszczenie kątowe
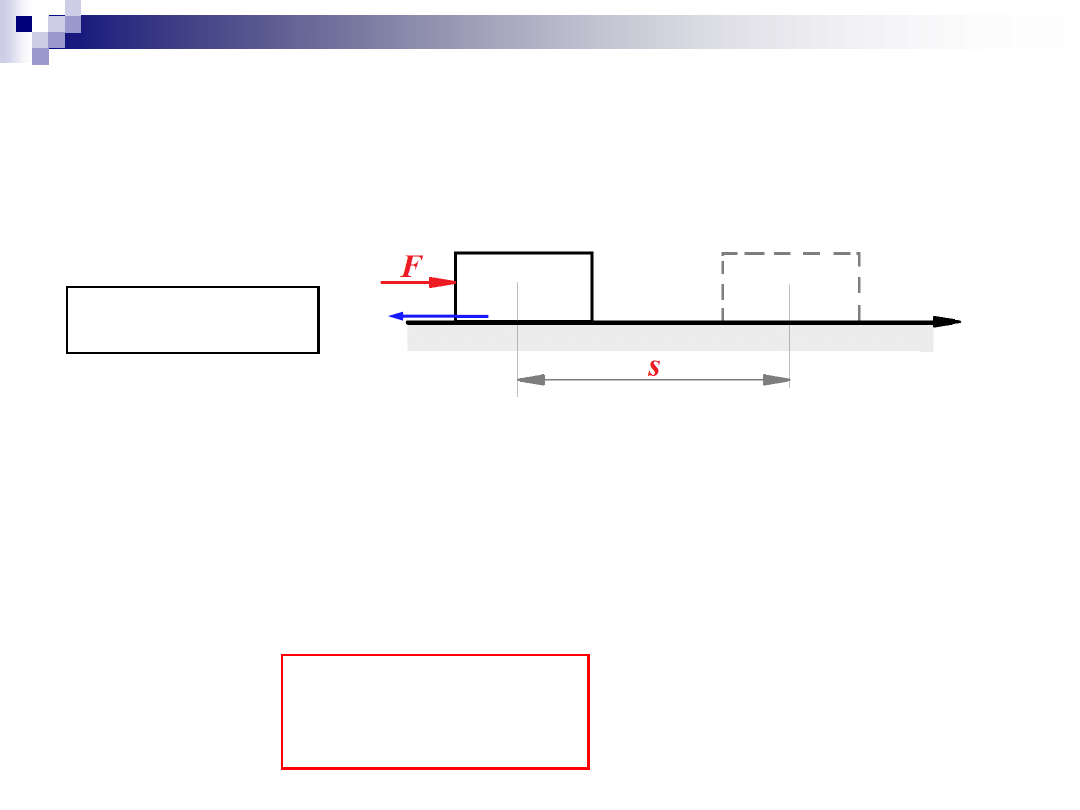
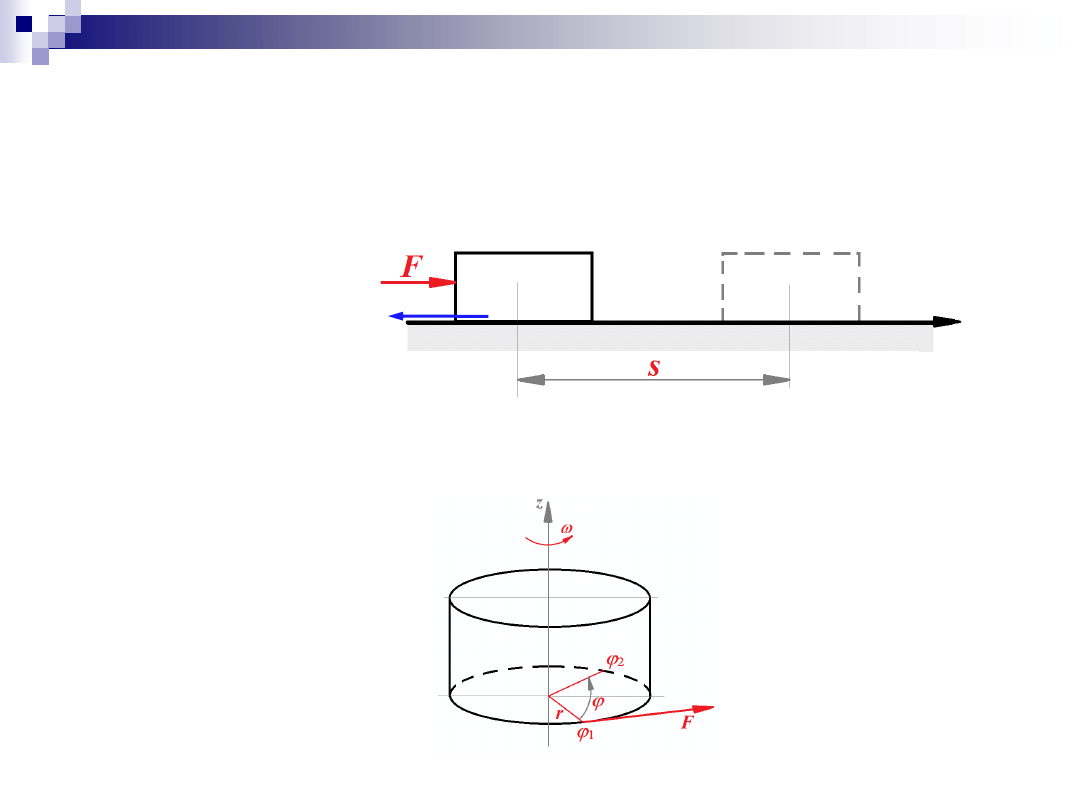
Praca – ruch postępowy
Wstęp
s
F
W
post
Dla ruchu postępowego punktu:
gdzie:
F
– siła (wypadkowa sił) w kierunku ruchu
s
– przemieszczenie liniowe
2
1
x
x
post
x
dx
x
F
W
x
x
1
x
2
T
s
T
s
F
s
T
F
W
post
x
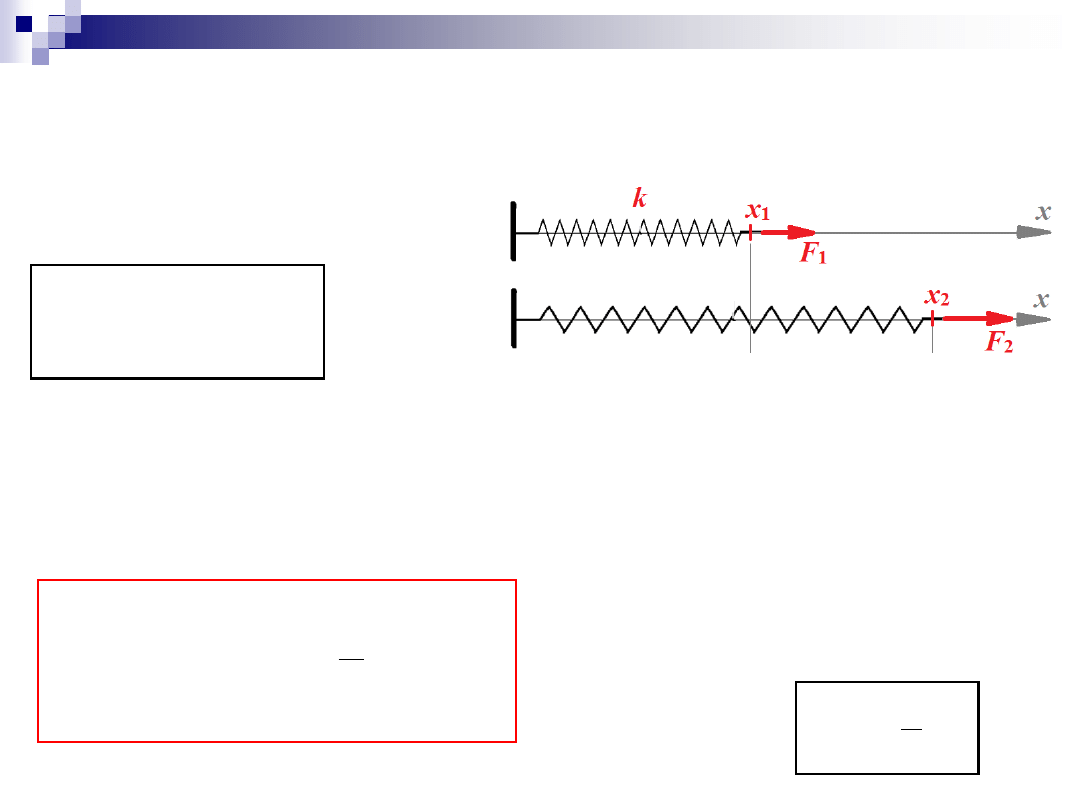
Praca – sprężyna
Wstęp
Praca sprężyny:
2
1
x
x
spr
dx
x
F
W
x
k
x
F
gdzie:
zatem:
2
1
2
1
2
2
2
x
x
spr
x
x
k
dx
kx
W
Jeśli
x
1
=0 to
2
2
1
kx
W
spr
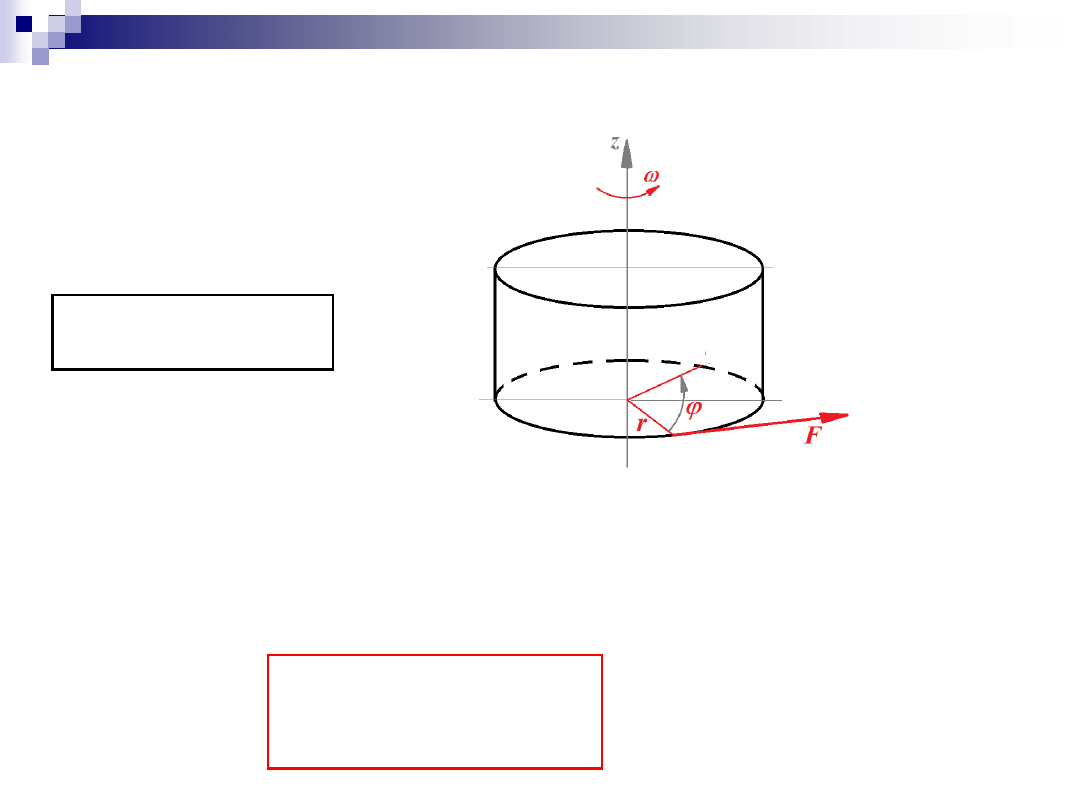
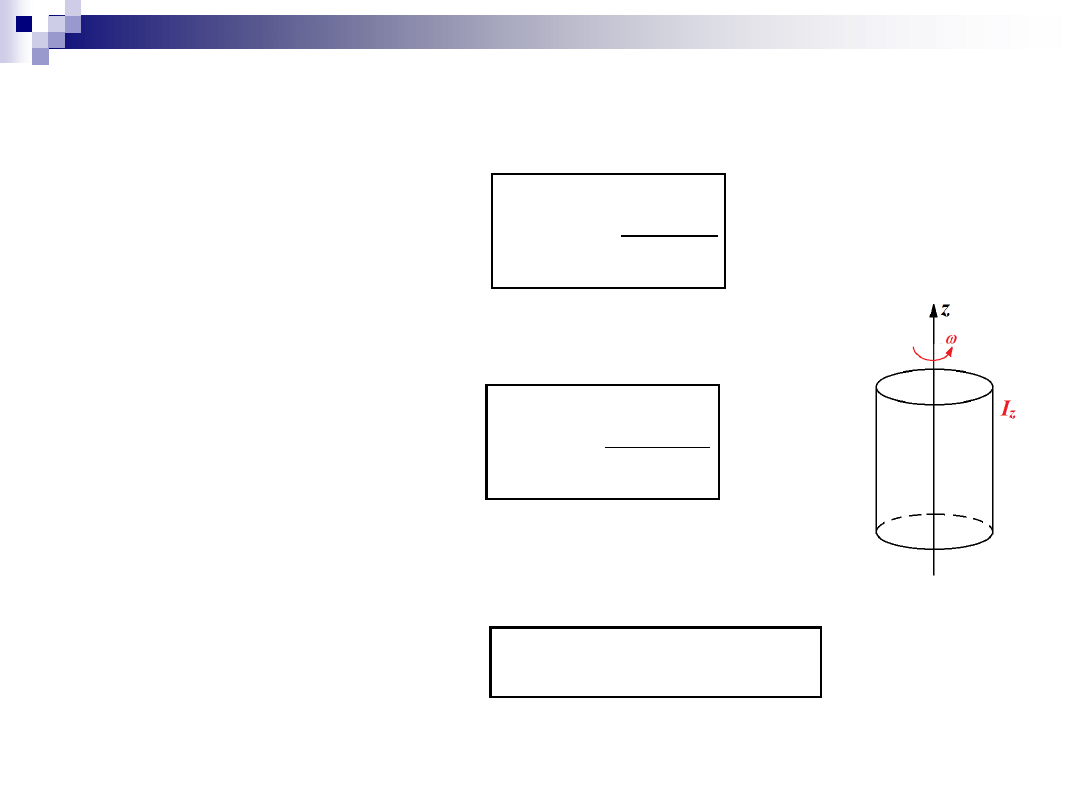
Praca – ruch obrotowy
Wstęp
j
z
obr
M
W
Dla ruchu obrotowego bryły:
gdzie:
M
z
– moment siły (wypadkowy moment sił) powodujący ruch obrotowy
j
– przemieszczenie kątowe
2
1
j
j
j
j
d
M
W
z
obr
r
F
M
z
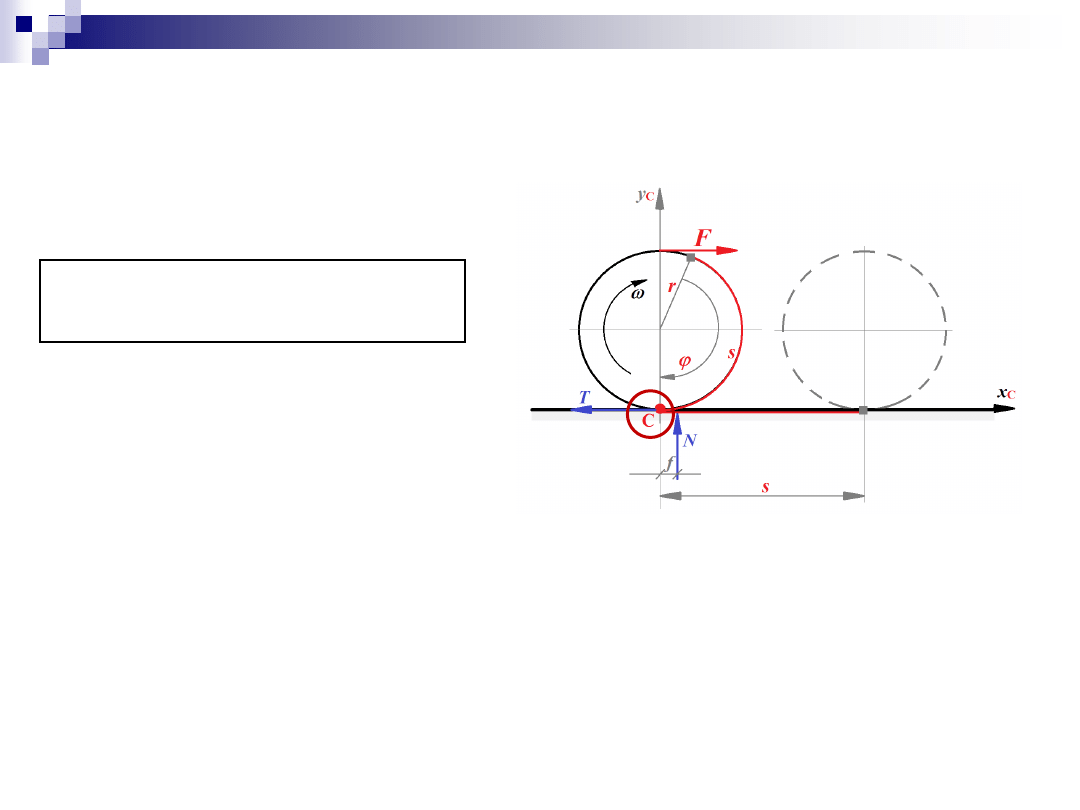
Praca – ruch płaski
Wstęp
j
C
z
obr
pł
M
W
W
Dla ruchu płaskiego bryły:
gdzie:
M
z
C
– moment siły (wypadkowy moment sił) powodujący ruch obrotowy
OBLICZANY WZGLĘDEM
CHWILOWEJ OSI OBROTU
(PRZECHODZĄCEJ PRZEZ
CHWILOWY ŚRODEK OBROTU
)
f
N
r
F
M
C
z
2
r
s
j
Energia kinetyczna
Energia kinetyczna – definicja
Wstęp
Dla ruchu postępowego punktu:
Dla ruchu obrotowego bryły:
2
2
m
E
post
kin
2
2
z
obr
kin
I
E
Dla ruchu płaskiego bryły:
obr
post
masy
śr
pł
kin
E
E
E
Wstęp
Zmiana energii kinetycznej
=
pracy
wszystkich sił / momentów wywołujących ruch
Zmiana en. kinetycznej a praca
W
E
kin
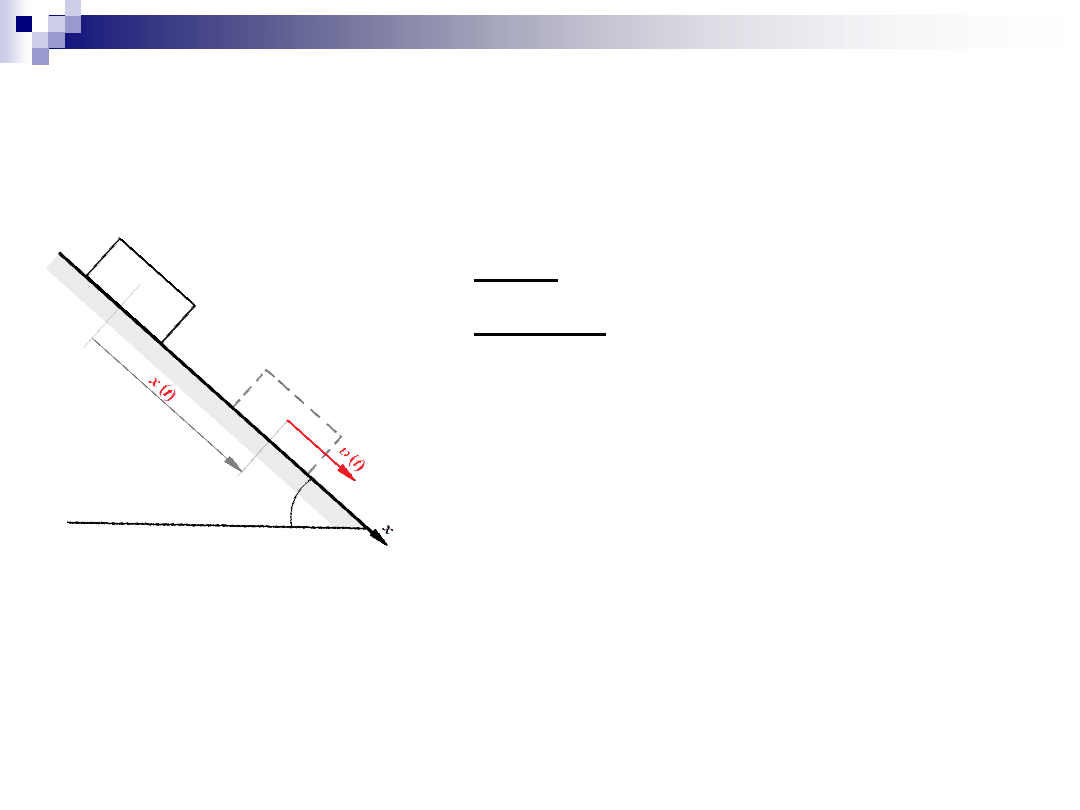
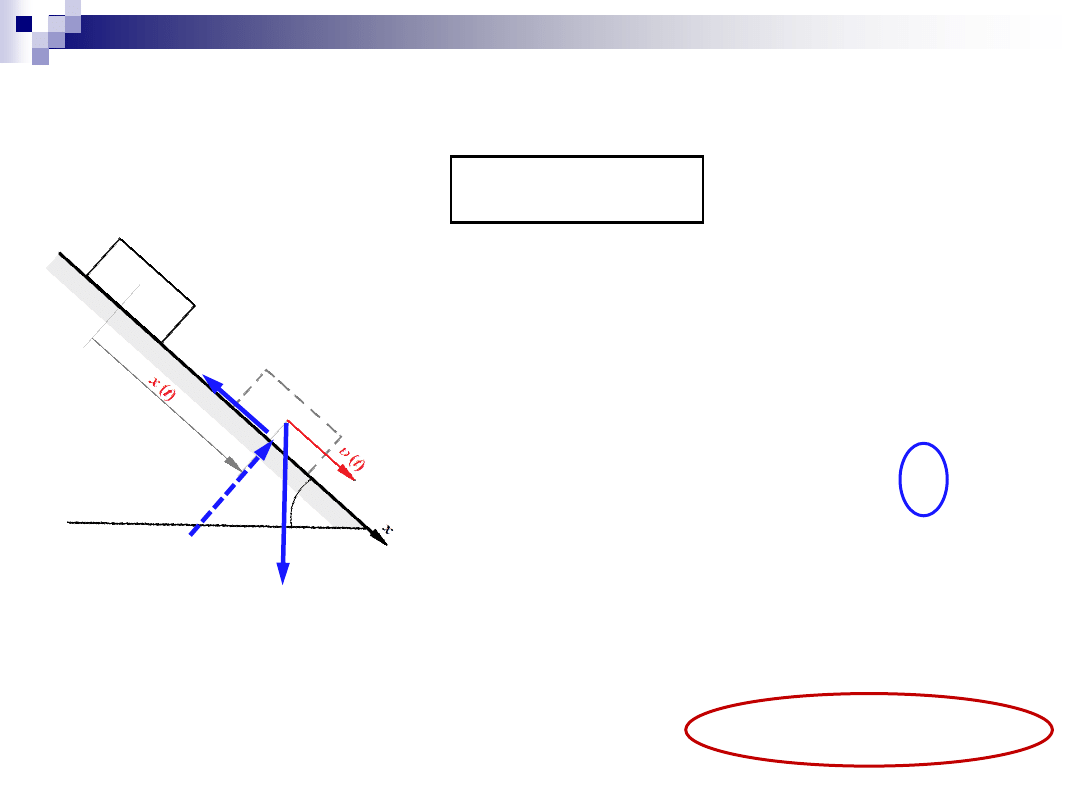
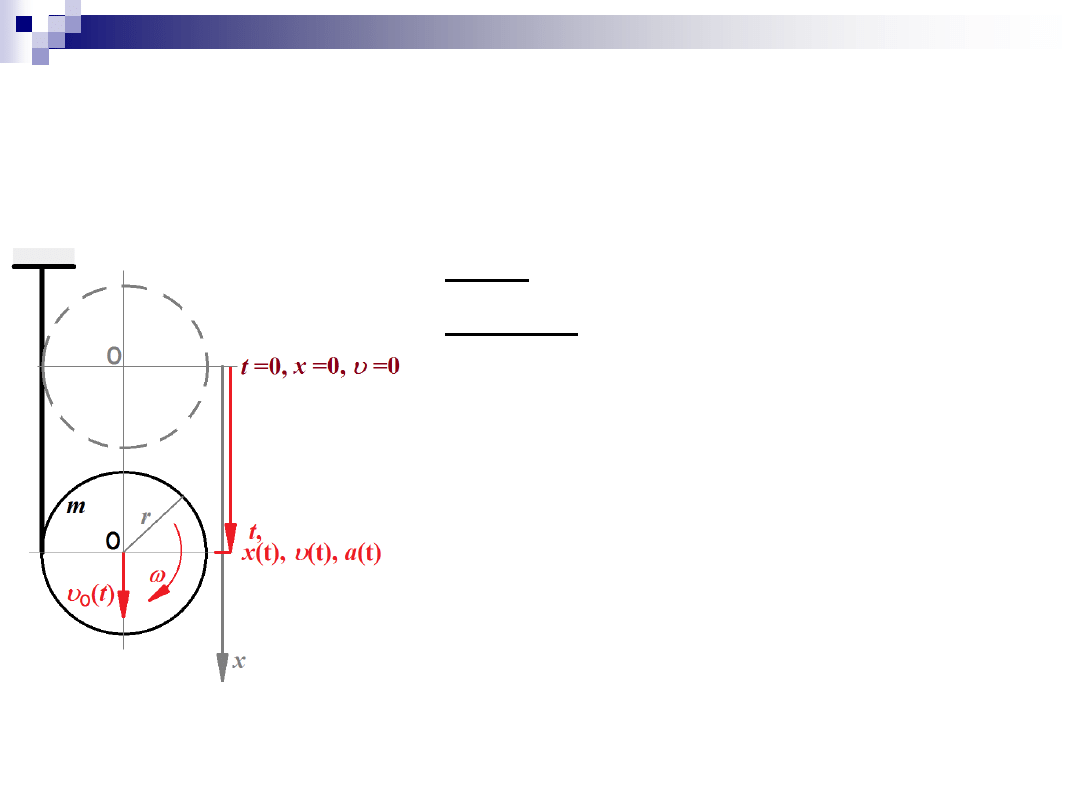
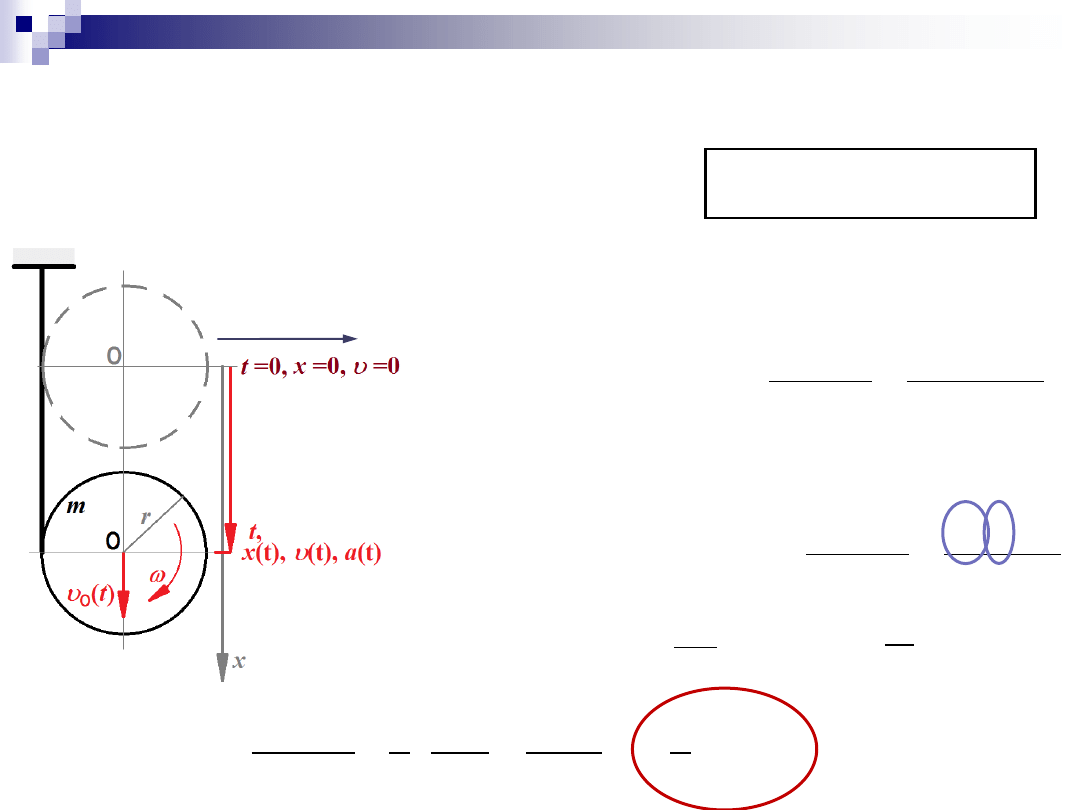
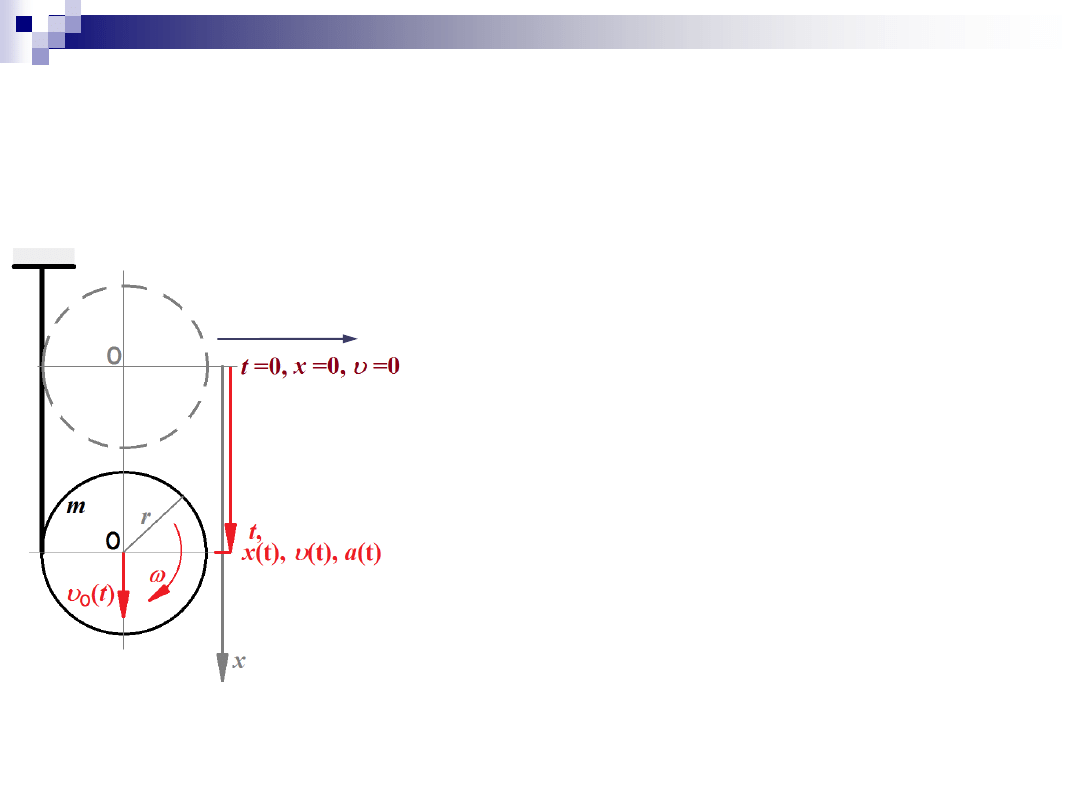
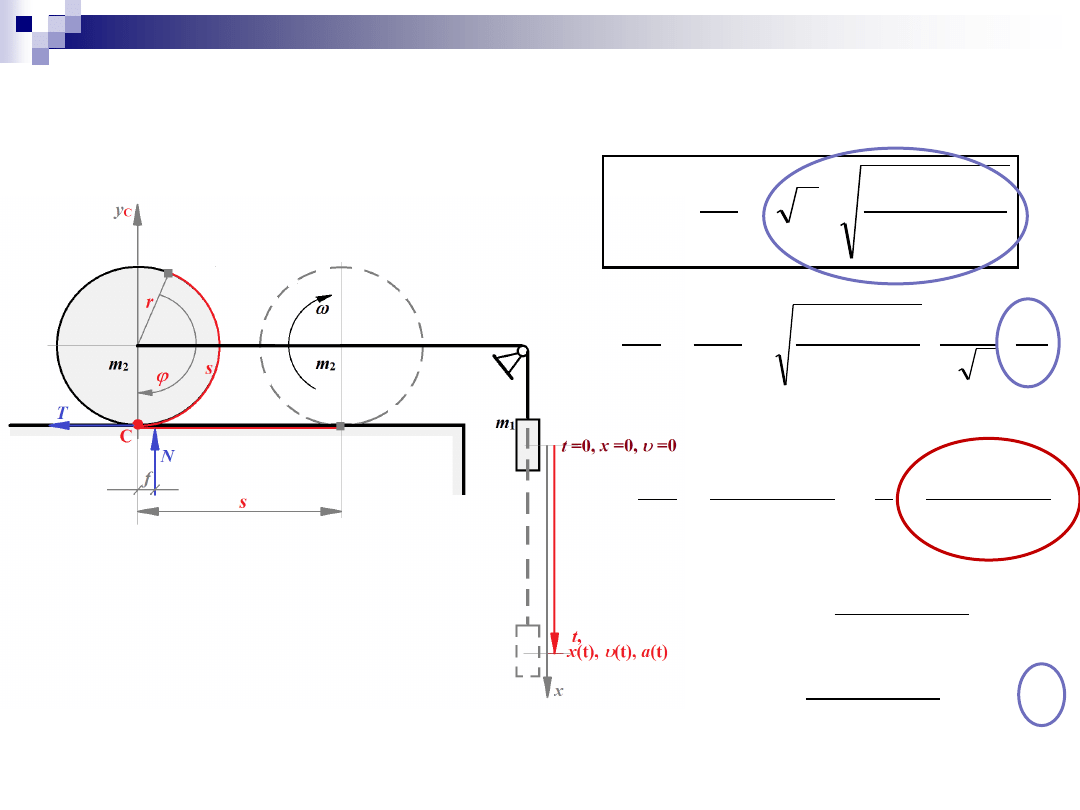
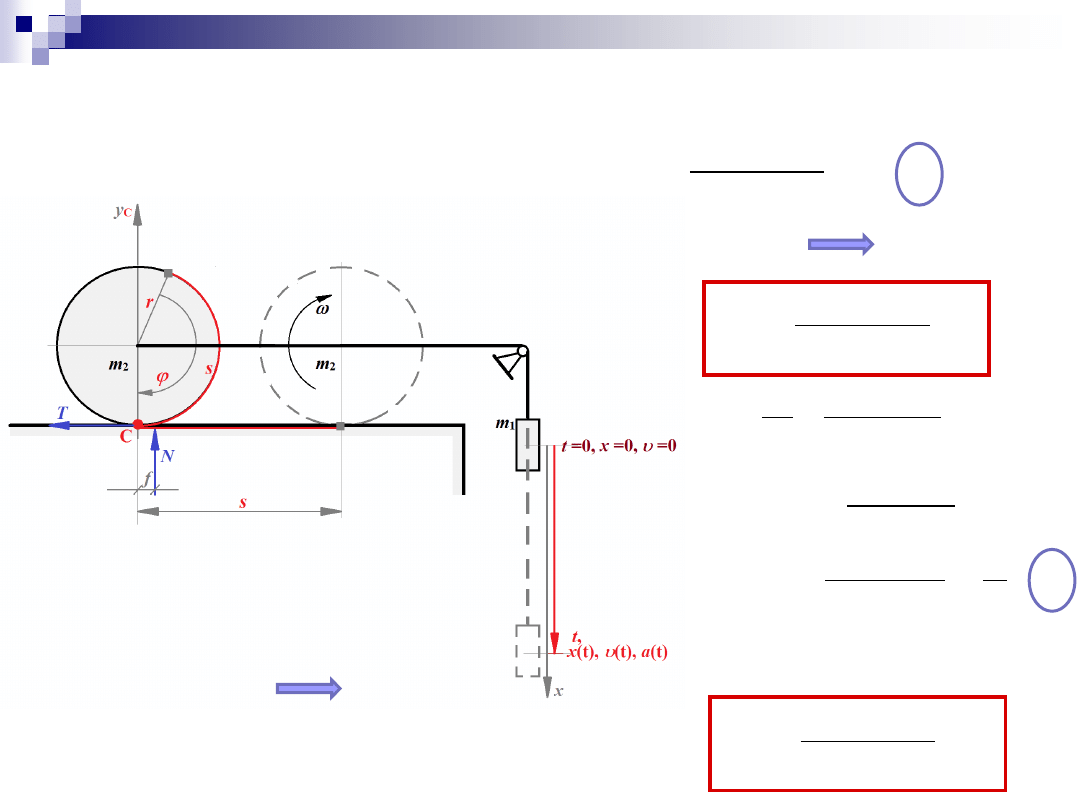
Zadanie 1
Dane: m,
a
,
m
Szukane:
x (t)
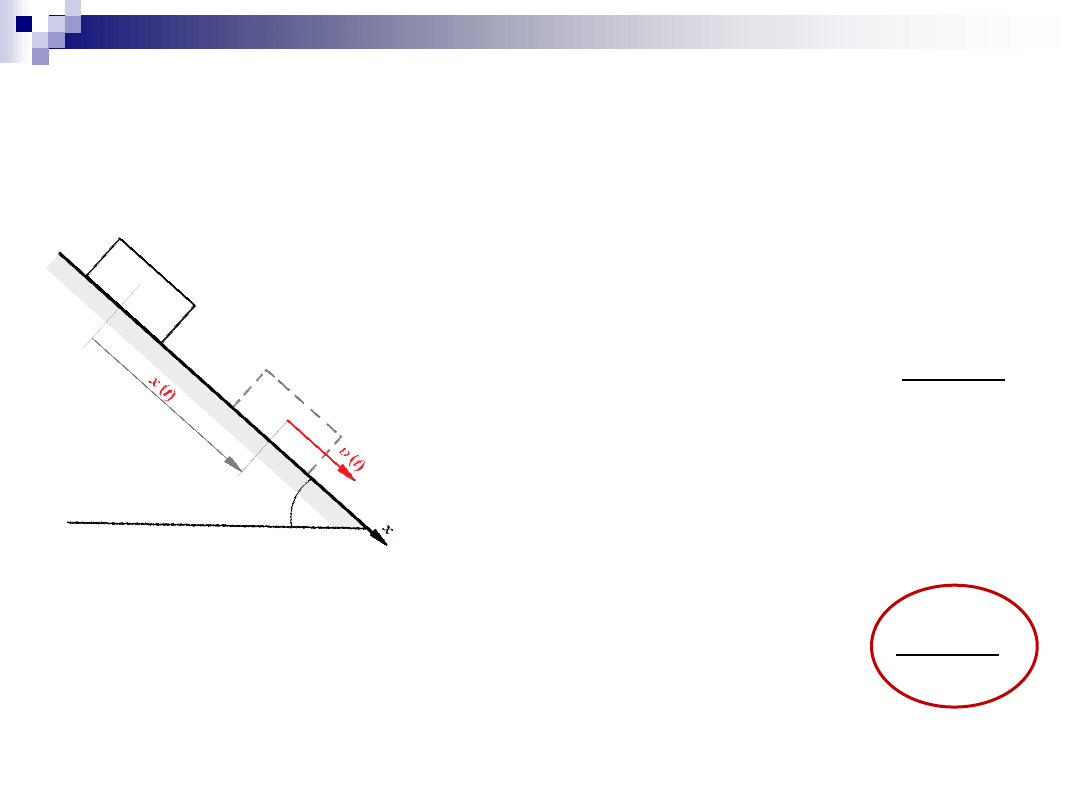
Zadanie 1
– ruch POSTĘPOWY
Początkowo masa w spoczynku.
a
m
t
= 0
x
=0
= 0
1. Zmiana energii kinetycznej
a
m
E
kin
w chwili
t
=0:
0
0
t
E
post
kin
E
kin
w chwili
t
:
2
)
(
2
t
m
t
E
post
kin
Zmiana
E
kin
w czasie od
t
=0 do
t
:
2
)
(
0
2
t
m
t
E
t
E
E
post
kin
post
kin
kin
t
= 0
x
=0
= 0
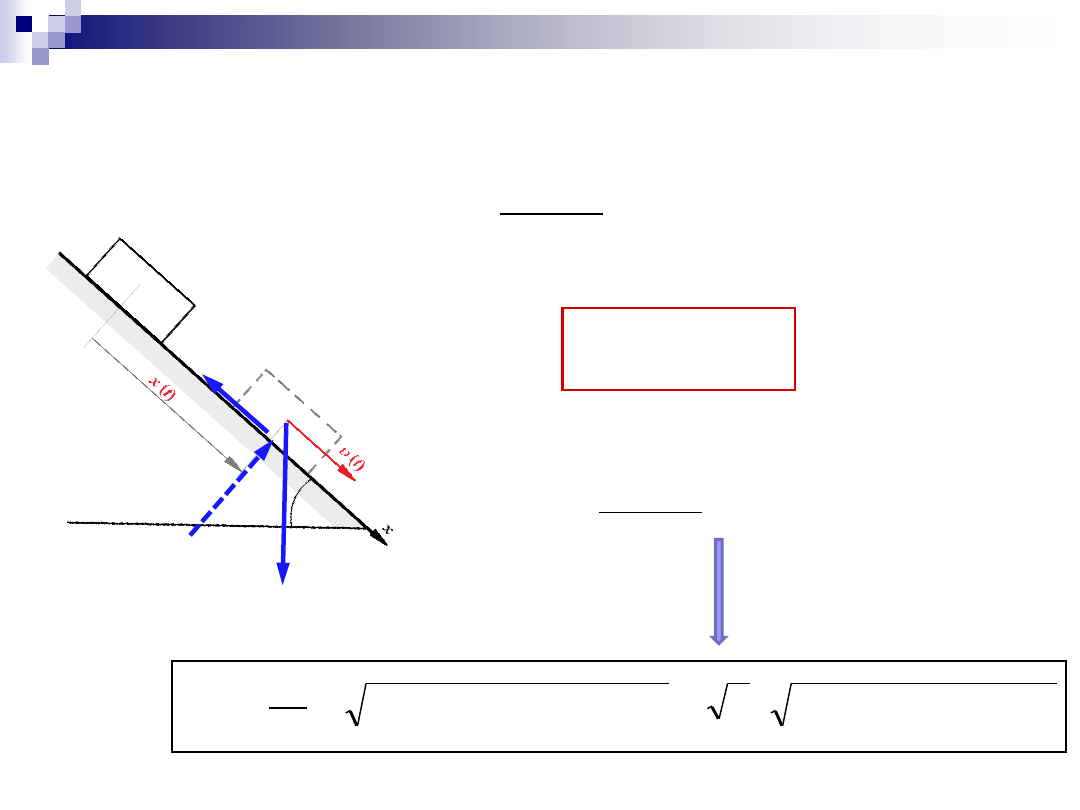
Zadanie 1
– ruch POSTĘPOWY
2. Praca sił – uwolnienie od więzów
a
m
siły wykonujące pracę :
T
mg
,
sin
a
przemieszczenie :
x
praca sił :
x
T
x
mg
W
a
sin
mg
T
N
a
m
m
cos
mg
N
T
czyli:
a
m
a
a
m
a
cos
sin
cos
sin
x
mg
x
mg
x
mg
W
gdzie:
t
= 0
x
=0
= 0
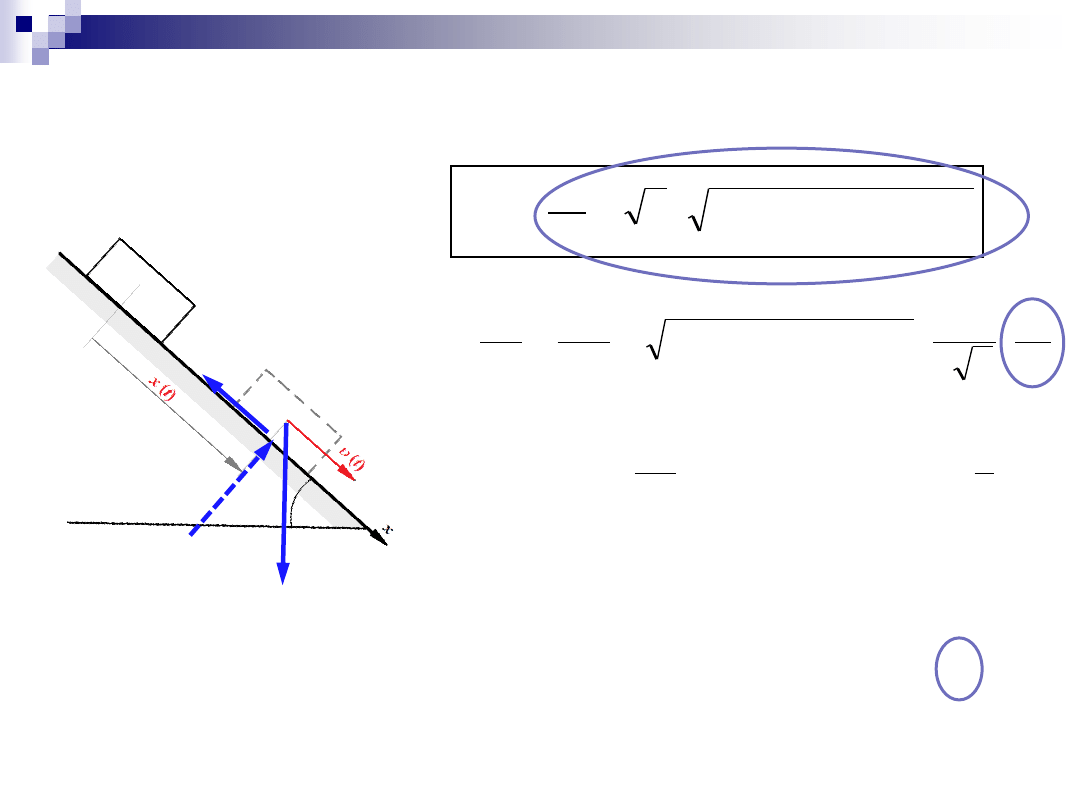
Zadanie 1
– ruch POSTĘPOWY
s
F
W
post
3. Zmiana en. kinet. a praca sił
a
m
mg
T
N
W
E
kin
2
)
(
2
t
m
E
post
kin
zatem:
a
m
a
cos
sin
2
)
(
2
x
mg
t
m
a
m
a
cos
sin
x
mg
W
a
m
a
a
m
a
cos
sin
2
cos
sin
2
)
(
g
x
x
g
dt
dx
t
t
= 0
x
=0
= 0
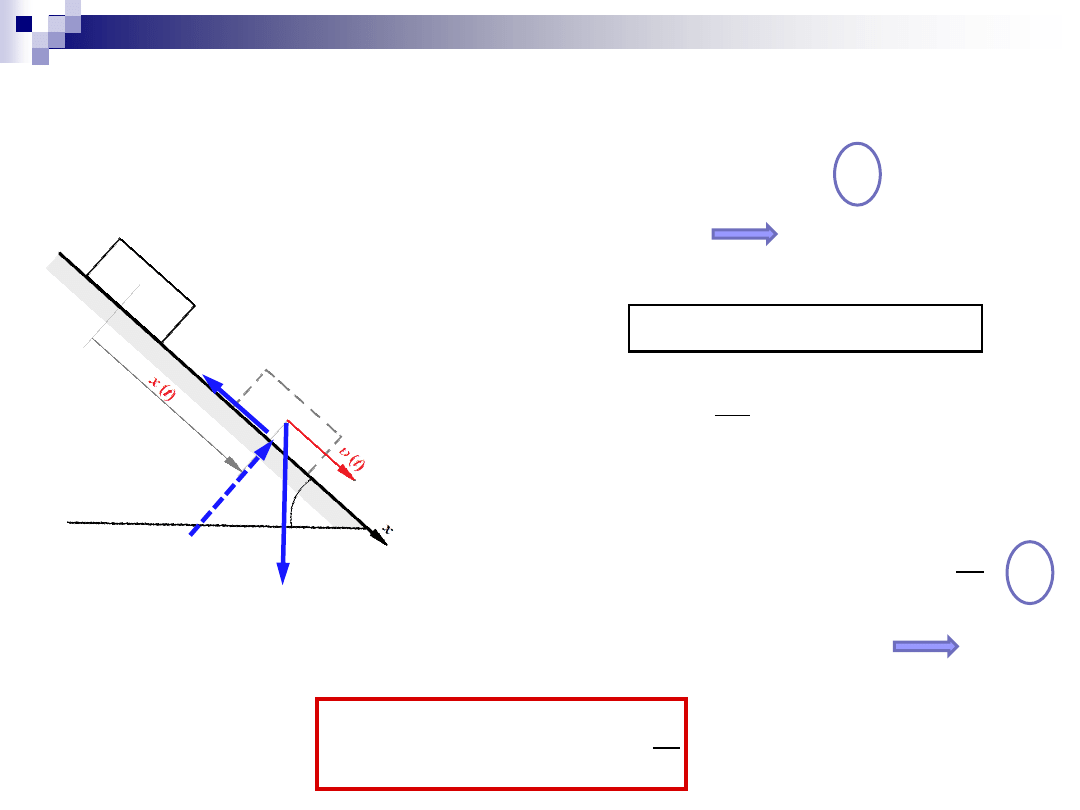
Zadanie 1
– ruch POSTĘPOWY
3. Zmiana en. kinet. a praca sił
a
m
mg
T
N
a
m
a
cos
sin
2
)
(
g
x
dt
dx
t
dt
dx
x
g
dt
x
d
dt
d
t
a
2
1
cos
sin
2
)
(
2
2
a
m
a
czyli:
2
1
cos
sin
2
)
(
a
m
a
g
dt
d
t
a
dt
g
d
a
m
a
cos
sin
C
t
g
t
a
m
a
cos
sin
)
(
stałą C wyznaczamy z warunku początkowego:
0
0
t
dla
t
= 0
x
=0
= 0
Zadanie 1
– ruch POSTĘPOWY
3. Zmiana en. kinet. a praca sił
a
t
= 0
x
=0
= 0
m
mg
T
N
C
t
g
t
a
m
a
cos
sin
)
(
0
0
t
dla
0
C
czyli:
t
g
t
a
m
a
cos
sin
)
(
t
g
dt
dx
t
a
m
a
cos
sin
)
(
dt
t
g
dx
a
m
a
cos
sin
D
t
g
t
x
2
cos
sin
)
(
2
a
m
a
stałą D wyznaczamy z warunku początkowego:
0
0
x
t
dla
zatem:
2
cos
sin
)
(
2
t
g
t
x
a
m
a
0
D
Zadanie 1
– ruch POSTĘPOWY
Zadanie 2
Dane: m, r
Szukane:
x (t)
,
(t)
,
a (t)
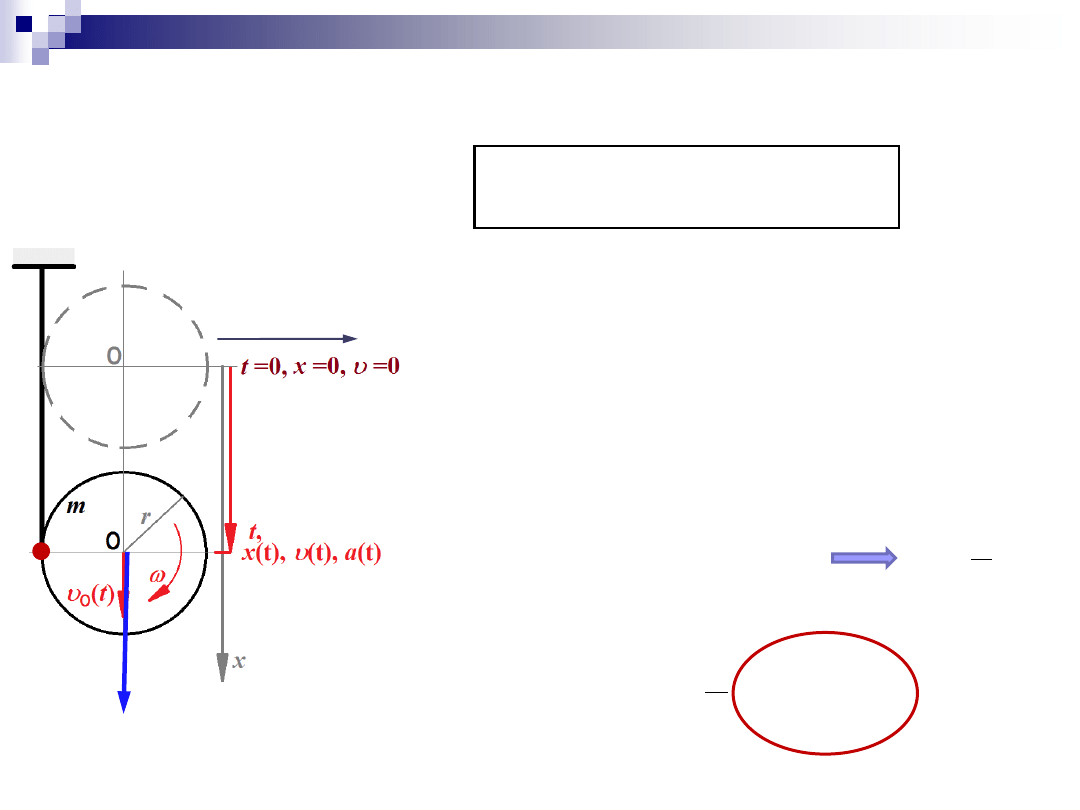
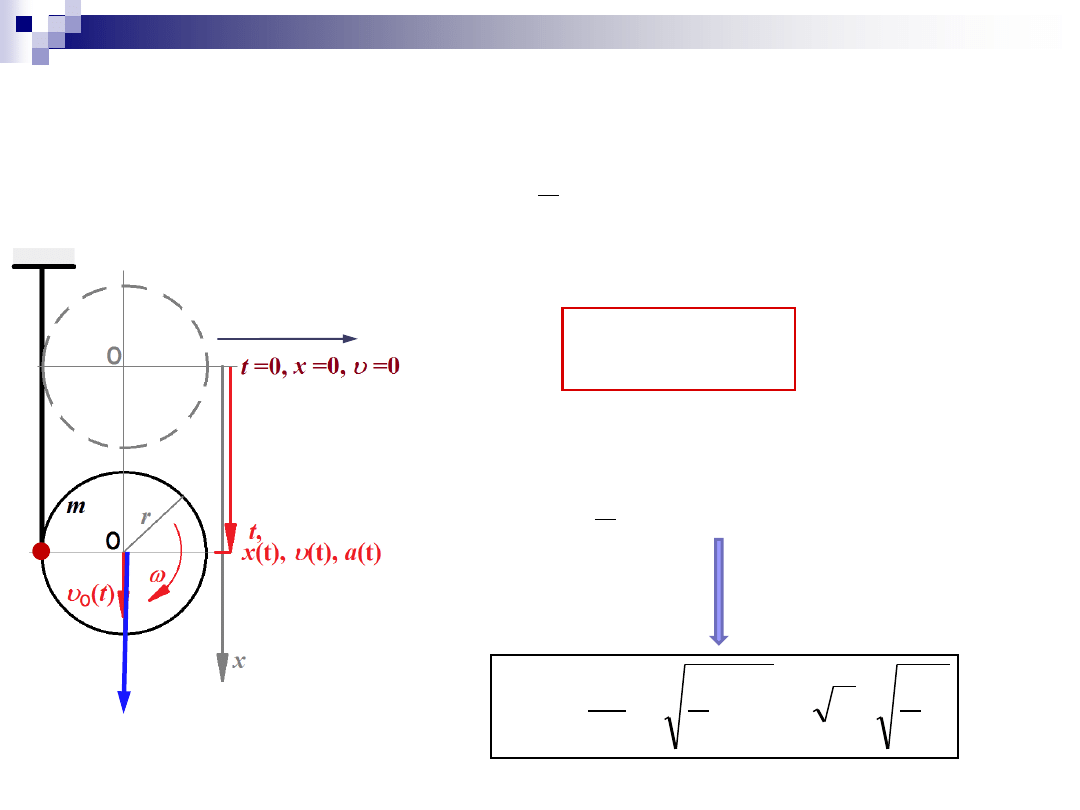
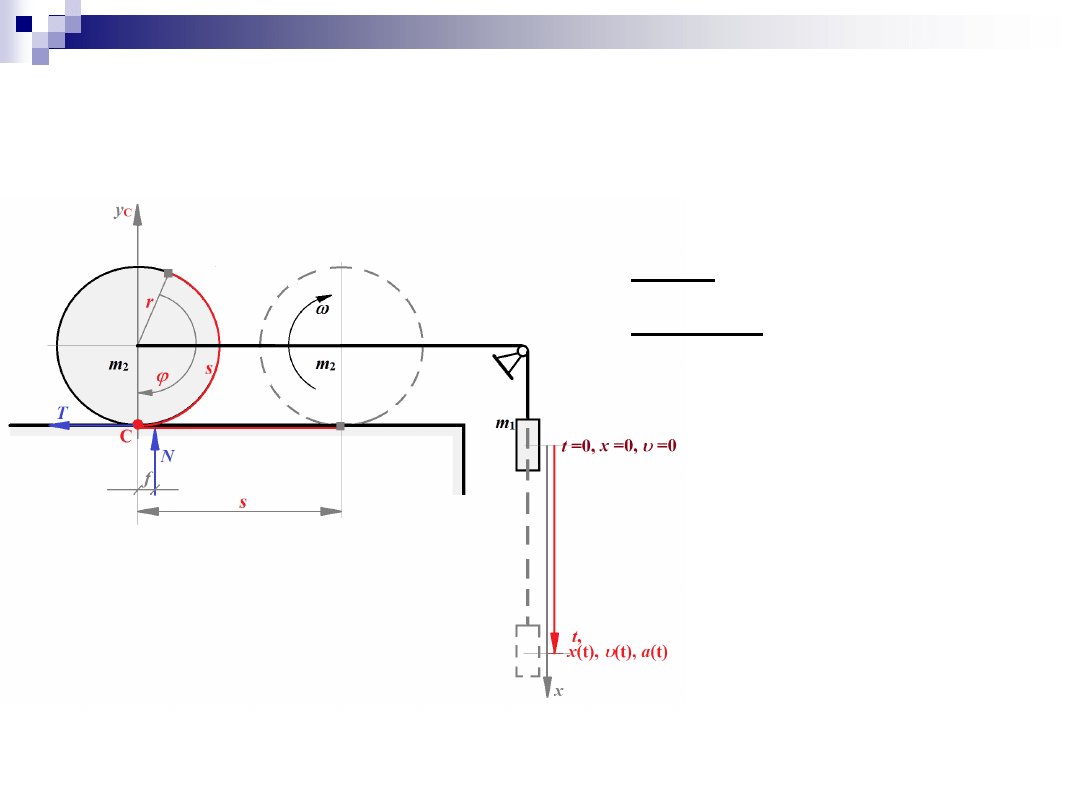
Zadanie 2
– ruch PŁASKI
Początkowo krążek w spoczynku.
1. Zmiana energii kinetycznej
E
kin
w chwili
t
=0:
0
0
t
E
pł
kin
E
kin
w chwili
t
:
2
)
(
2
)
(
2
2
t
I
t
m
t
E
O
z
o
pł
kin
Zmiana
E
kin
w czasie od
t
=0 do
t
:
Zadanie 2
– ruch PŁASKI
Dla ruchu płaskiego bryły:
obr
post
masy
śr
pł
kin
E
E
E
y
2
)
(
2
)
(
0
2
2
t
I
t
m
t
E
t
E
E
O
z
o
pł
kin
pł
kin
kin
gdzie:
2
2
mr
I
O
z
i
r
O
zatem:
)
(
4
3
)
(
2
2
1
2
)
(
2
2
2
2
t
m
r
t
mr
t
m
E
o
O
o
kin
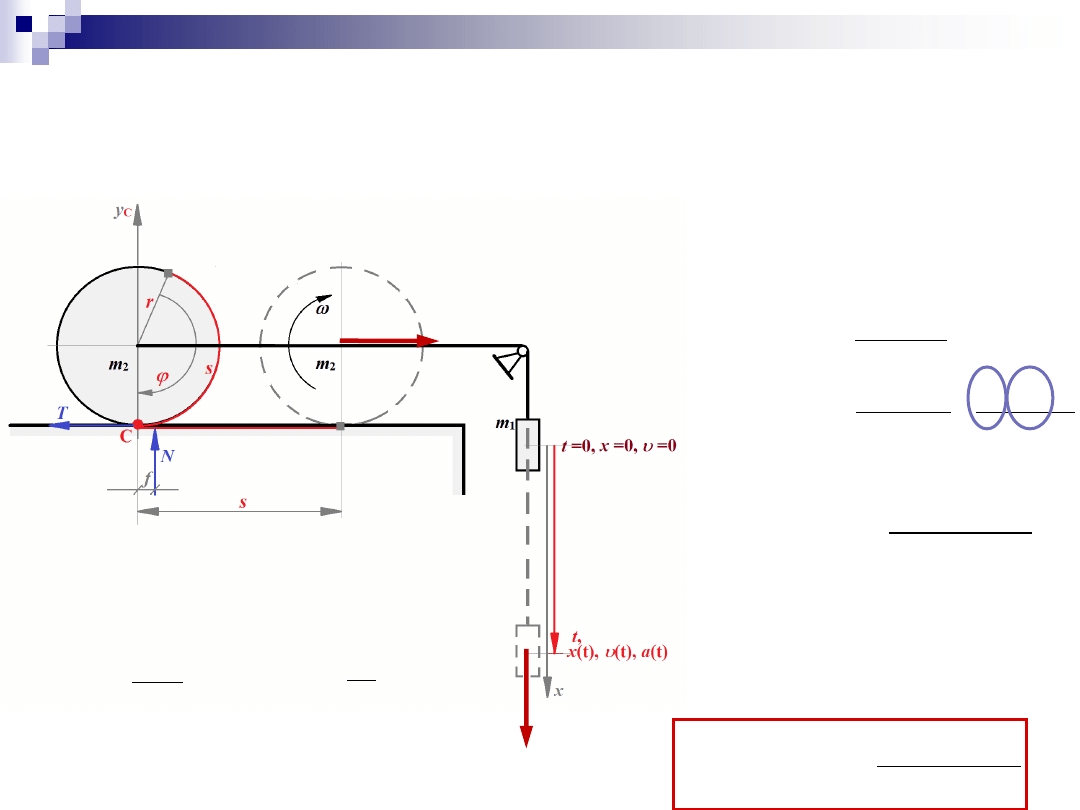
1. Praca sił / momentów
Zadanie 2
– ruch PŁASKI
y
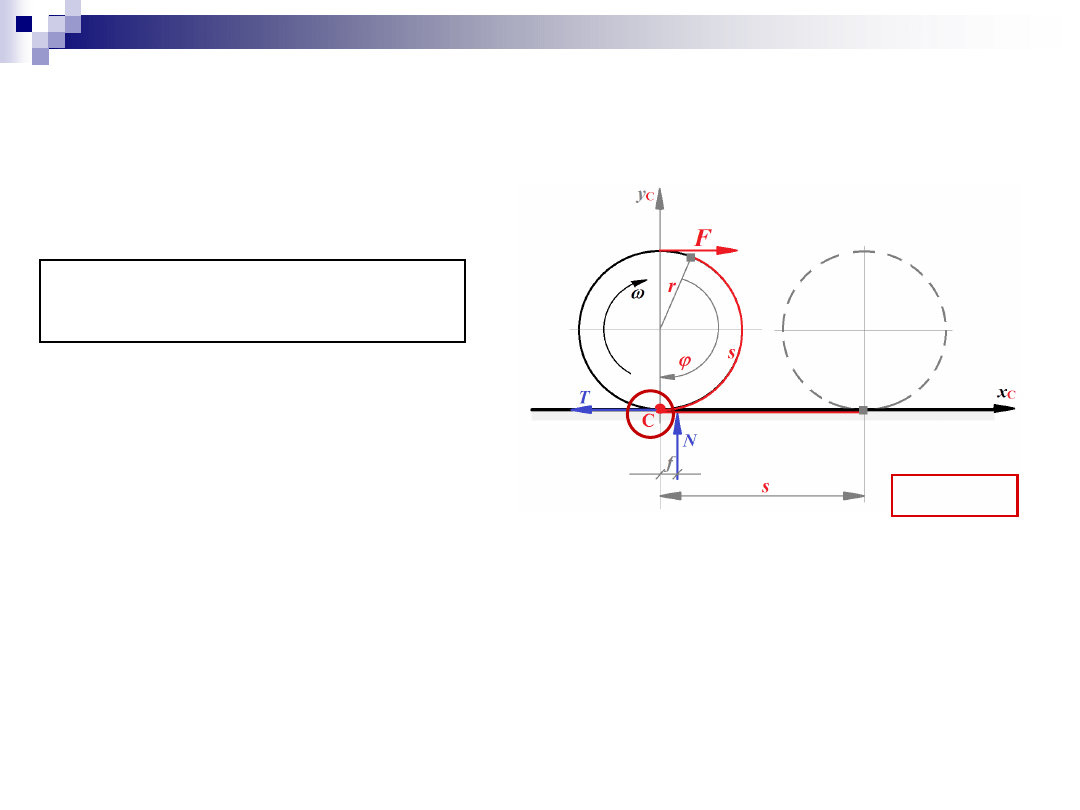
Praca – ruch płaski
Przypomnienie
j
C
z
obr
pł
M
W
W
Dla ruchu płaskiego bryły:
gdzie:
M
z
C
– moment siły (wypadkowy moment sił) powodujący ruch obrotowy
OBLICZANY WZGLĘDEM
CHWILOWEJ OSI OBROTU
(PRZECHODZĄCEJ PRZEZ
CHWILOWY ŚRODEK OBROTU
)
f
N
r
F
M
C
z
2
r
s
j
gdzie:
M
z
– moment siły (wypadkowy moment sił) powodujący ruch obrotowy
j
– przemieszczenie kątowe
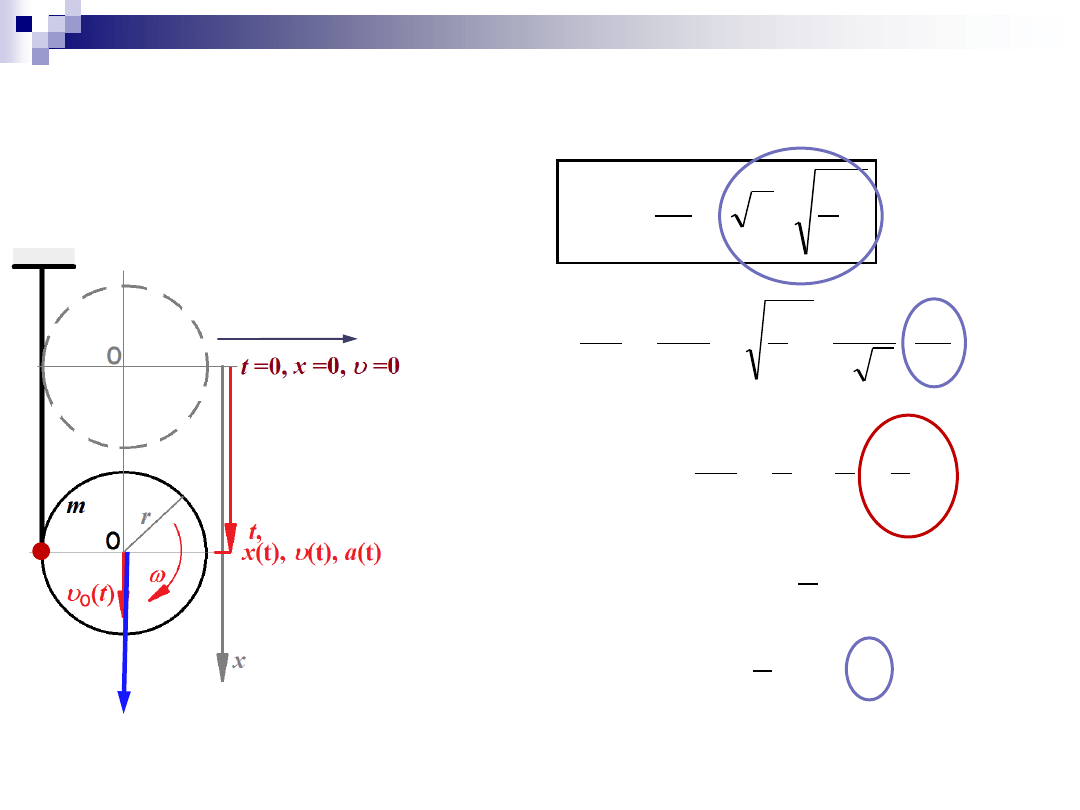
2. Praca sił
Zadanie 2
– ruch PŁASKI
y
momenty sił wykonujące pracę :
r
mg
M
C
z
przemieszczenie kątowe :
j
praca sił :
j
r
mg
W
mg
C
r
x
j
j
C
z
obr
pł
M
W
W
gdzie:
r
x
j
zatem:
)
(t
x
mg
r
x
r
mg
W
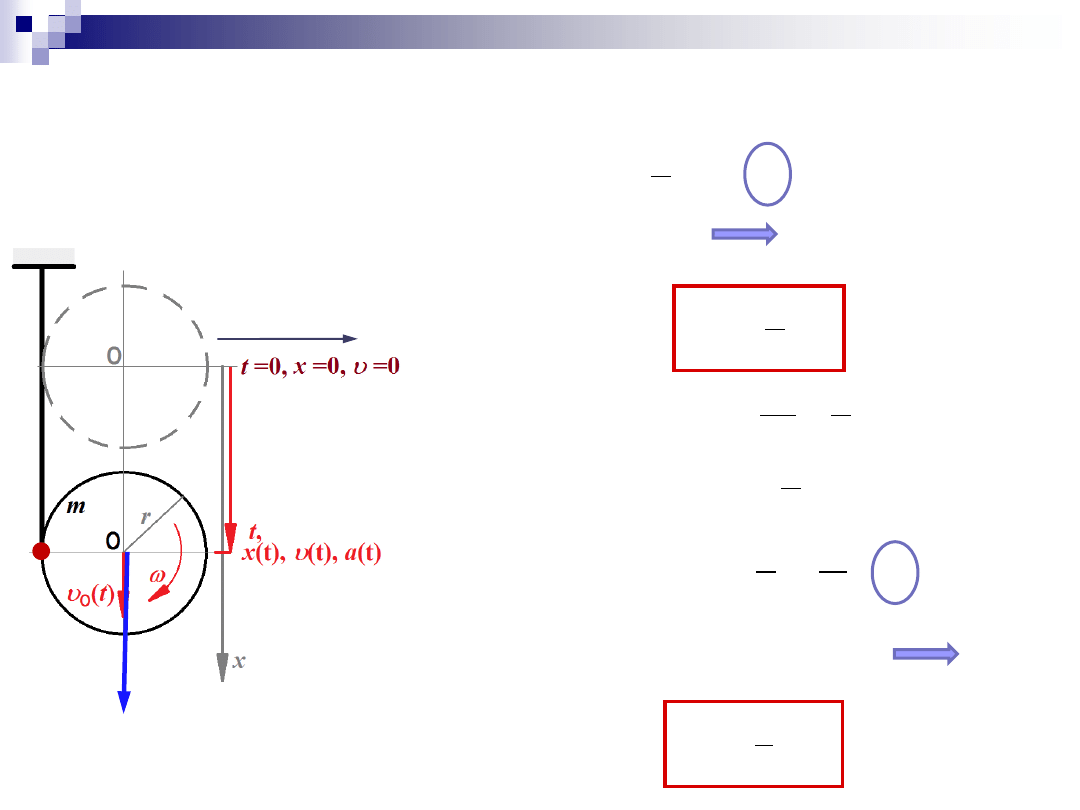
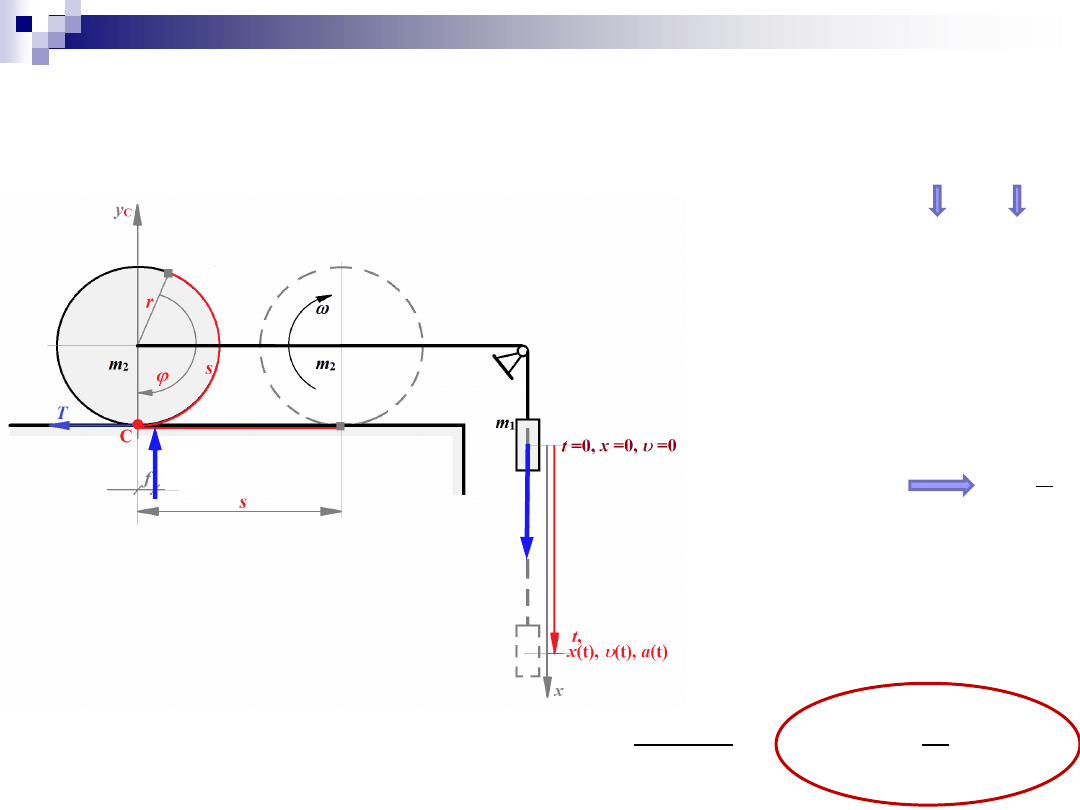
Zadanie 2
– ruch PŁASKI
y
mg
C
)
(
4
3
2
t
m
E
o
kin
)
(t
x
mg
W
W
E
kin
zatem:
)
(
)
(
4
3
2
t
x
mg
t
m
o
g
x
x
g
dt
dx
t
3
4
3
4
)
(
3. Zmiana en. kinet. a praca sił
3. Zmiana en. kinet. a praca sił
g
x
dt
dx
t
3
4
)
(
dt
dx
x
g
dt
x
d
dt
d
t
a
2
1
3
4
)
(
2
2
czyli:
g
g
dt
d
t
a
3
2
2
1
3
4
)
(
dt
g
d
3
2
C
t
g
t
3
2
)
(
stałą C wyznaczamy z warunku początkowego:
0
0
t
dla
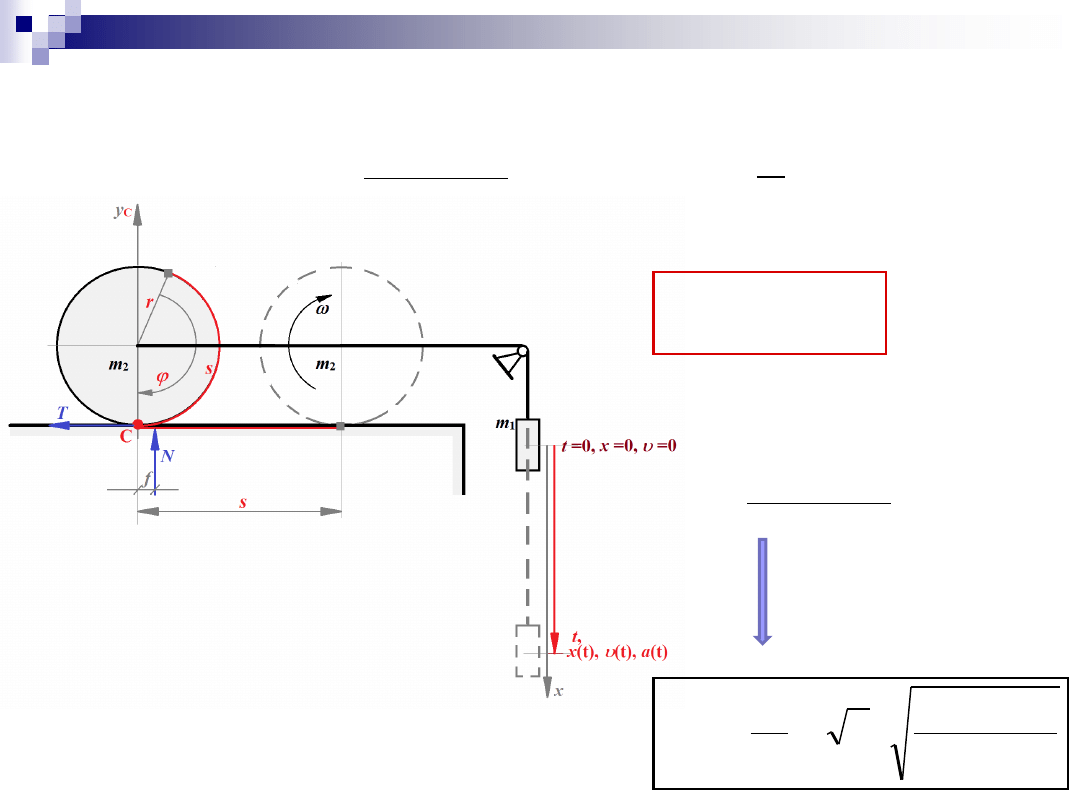
Zadanie 2
– ruch PŁASKI
y
mg
C
3. Zmiana en. kinet. a praca sił
C
t
g
t
3
2
)
(
0
0
t
dla
0
C
czyli:
t
g
t
3
2
)
(
t
g
dt
dx
t
3
2
)
(
dt
t
g
dx
3
2
D
t
g
t
x
2
3
2
)
(
2
0
0
x
t
dla
zatem:
2
3
1
)
(
t
g
t
x
0
D
Zadanie 2
– ruch PŁASKI
y
mg
C
stałą D wyznaczamy z
warunku początkowego:
Zadanie 3
Dane: m
1
, m
2
, r, f
Szukane:
x (t)
,
(t)
,
a (t)
Zadanie 3
– układ złożony
Początkowo układ w spoczynku.
UWALNIAMY od WIĘZÓW
NIE ROZDZIELAMY !!!!
Zadanie 3
– układ złożony
1. Zmiana energii kinetycznej
E
kin
w chwili
t
=0:
0
0
t
E
kin
E
kin
w chwili
t
:
t
E
t
E
t
E
m
kin
m
kin
kin
2
1
Zmiana
E
kin
w czasie od
t
=0 do
t
:
gdzie:
2
)
(
2
1
1
t
m
t
E
O
m
kin
2
)
(
2
)
(
2
2
2
2
t
I
t
m
t
E
O
z
O
m
kin
O
O
t
= 0
O
= 0
t
O
(t)
O
O
2
2
2
r
m
I
O
z
r
O
Początkowo układ w spoczynku.
4
3
2
)
(
2
1
2
m
m
t
t
E
O
kin
4
3
2
)
(
2
1
2
m
m
t
E
O
kin
więc:
)
(
2
1
2
1
t
x
g
r
f
m
m
x
r
f
g
m
x
g
m
W
Zadanie 3
– układ złożony
Początkowo układ w spoczynku.
UWALNIAMY od WIĘZÓW
NIE ROZDZIELAMY !!!!
2. Praca sił
m
1
g
siły i momenty sił wykonujące pracę :
przemieszczenia :
)
(
),
(
t
t
x
j
praca :
j
Nf
x
g
m
W
1
f
N
g
m
,
1
r
x
j
gdzie:
r
x
j
oraz:
g
m
N
2
zatem:
N
)
(t
x
4
3
2
)
(
2
1
2
m
m
t
E
o
kin
)
(
)
(
1
2
1
t
x
g
m
t
x
g
r
f
m
m
W
W
E
kin
zatem:
2
1
1
3
2
4
)
(
m
m
g
m
x
dt
dx
t
Zadanie 3
– układ złożony
)
(
4
3
2
)
(
1
2
1
2
t
x
g
m
m
m
t
o
3. Zmiana en. kinet. a praca sił
Zadanie 3
– układ złożony
2
1
1
3
2
4
)
(
m
m
g
m
x
dt
dx
t
dt
dx
x
m
m
g
m
dt
x
d
dt
d
t
a
2
1
3
2
4
)
(
2
1
1
2
2
g
m
m
m
g
m
m
m
dt
d
t
a
2
1
1
2
1
1
3
2
2
2
1
3
2
4
)
(
dt
g
m
m
m
d
2
1
1
3
2
2
C
t
g
m
m
m
t
2
1
1
3
2
2
)
(
stałą C wyznaczamy z warunku początkowego:
0
0
t
dla
3. Zmiana en. kinet. a praca sił
Zadanie 3
– układ złożony
C
t
g
m
m
m
t
2
1
1
3
2
2
)
(
0
0
t
dla
0
C
czyli:
t
g
m
m
m
t
2
1
1
3
2
2
)
(
t
g
m
m
m
dt
dx
t
2
1
1
3
2
2
)
(
dt
t
g
m
m
m
dx
2
1
1
3
2
2
D
t
g
m
m
m
t
x
2
3
2
2
)
(
2
2
1
1
0
0
x
t
dla
zatem:
2
2
1
1
3
2
)
(
t
g
m
m
m
t
x
0
D
stałą D wyznaczamy z
warunku początkowego:
3. Zmiana en. kinet. a praca sił
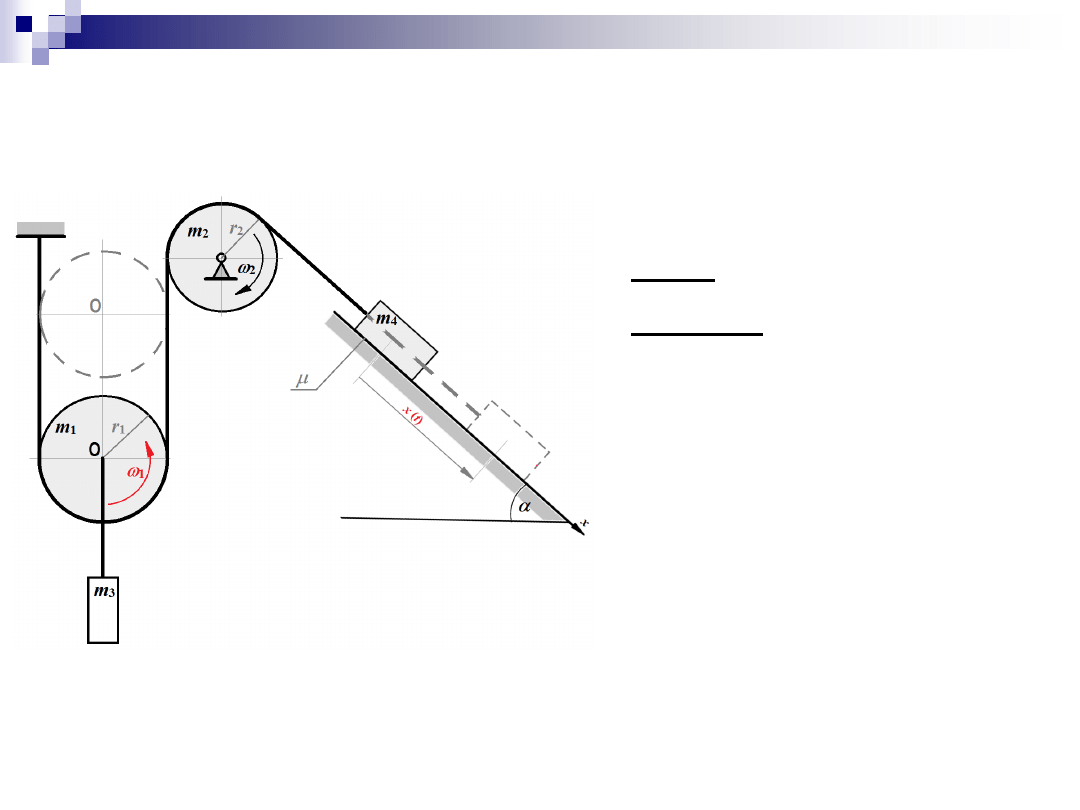
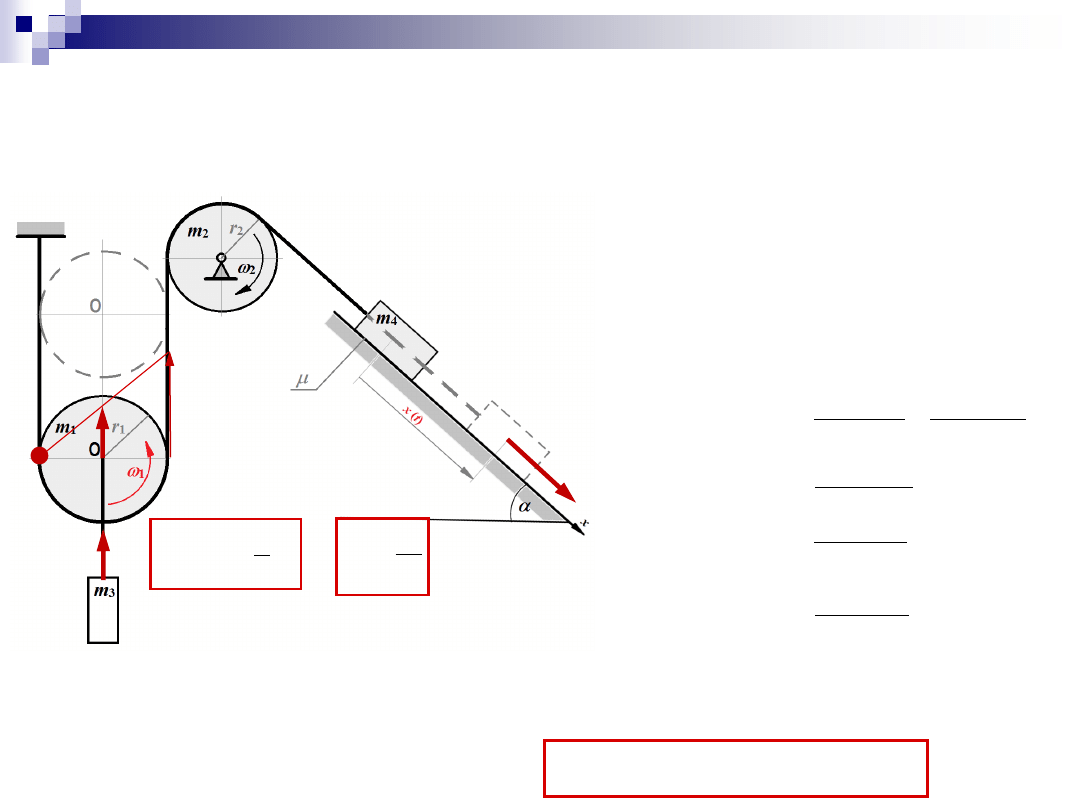
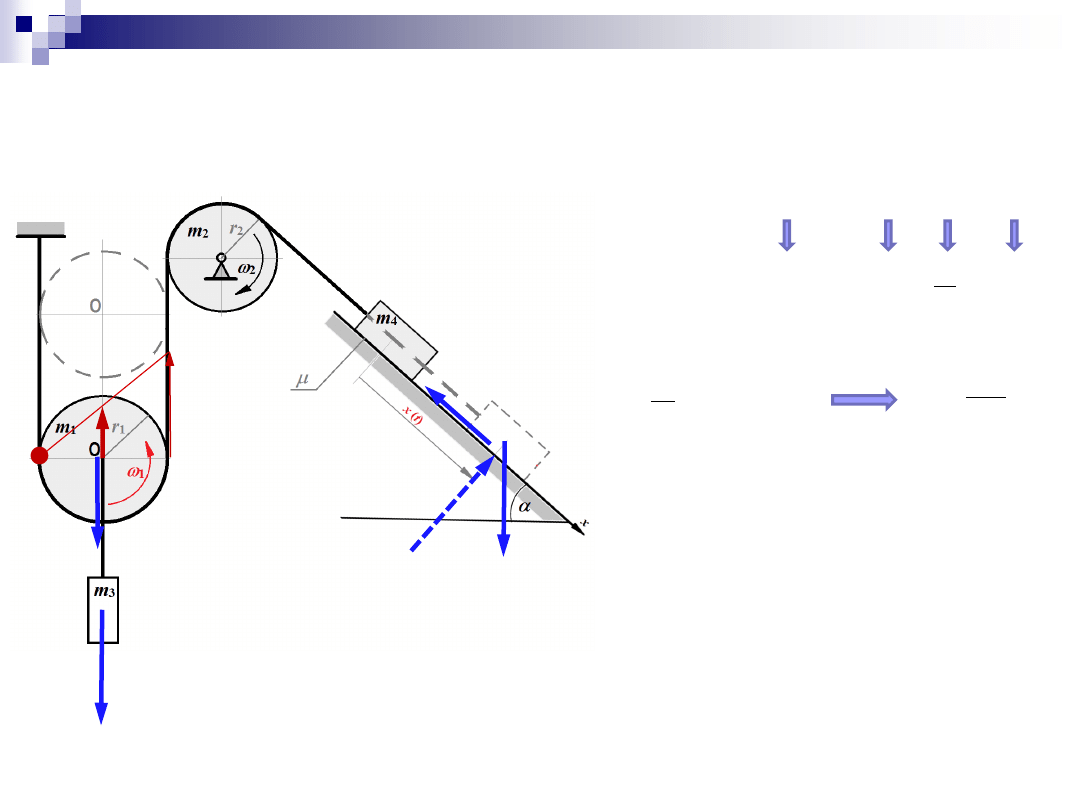
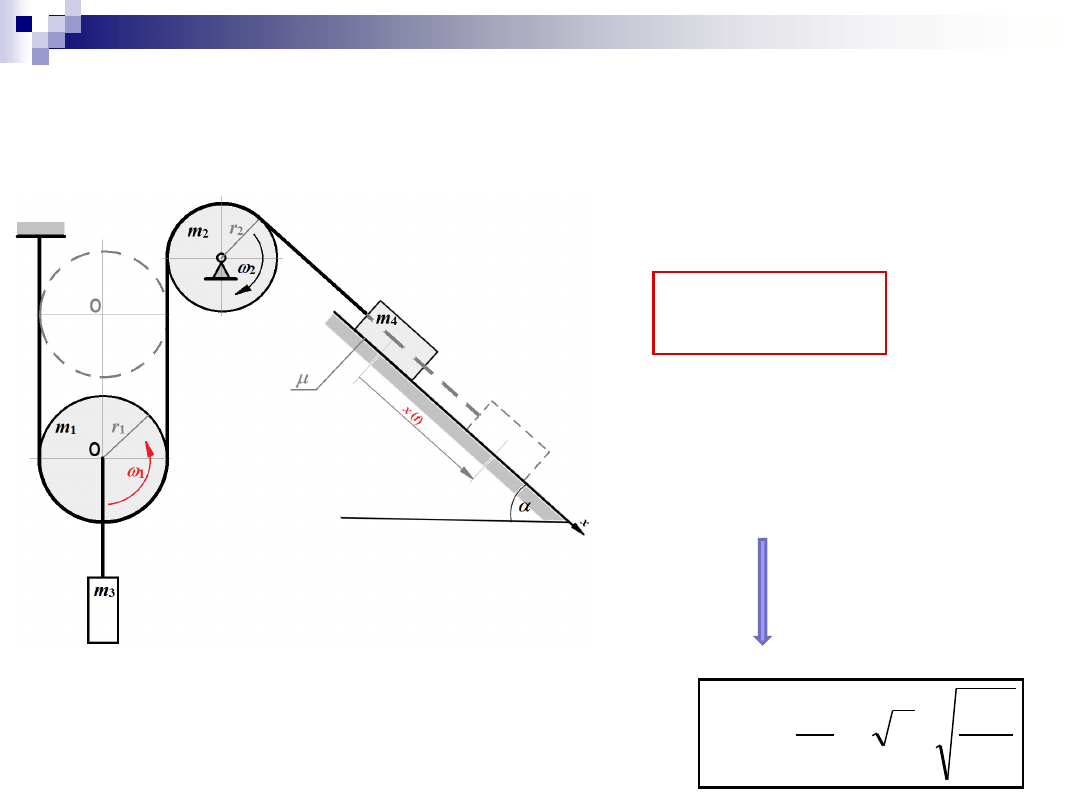
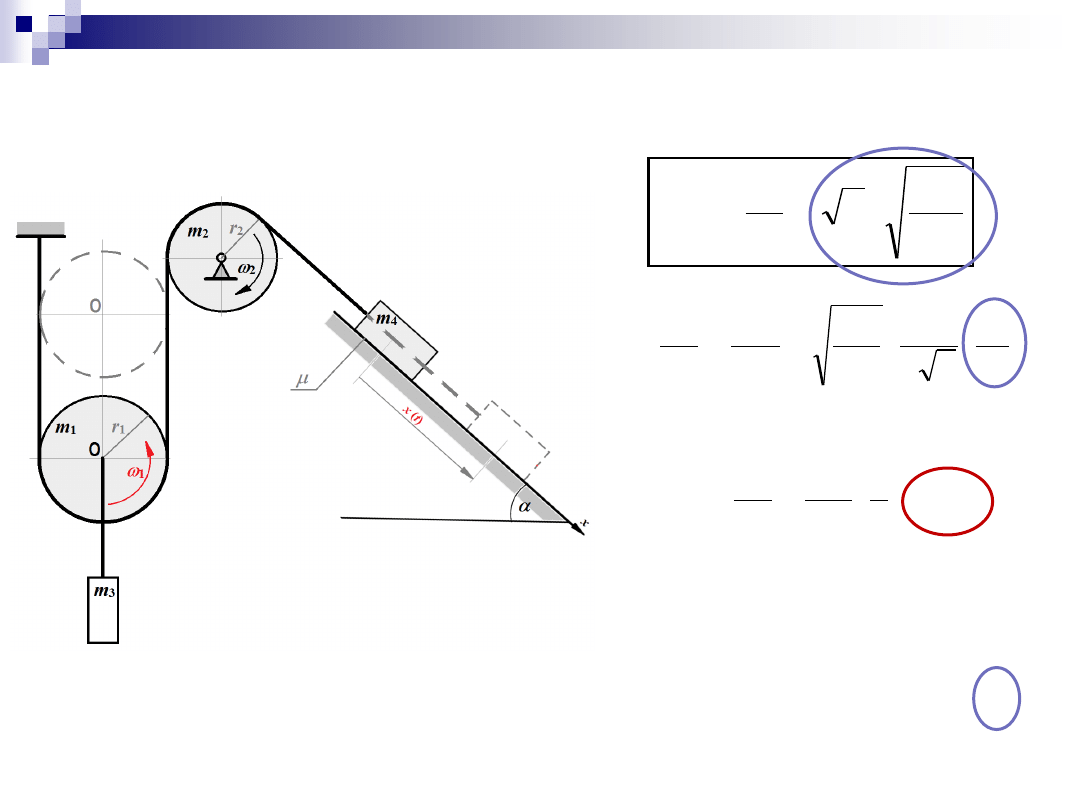
Zadanie 4
Zadanie 4
– układ złożony
UWALNIAMY od WIĘZÓW
NIE ROZDZIELAMY !!!!
t
= 0
x
=0
= 0
Dane: m
1
, m
2
, m
3
, m
4
, r
1
, r
2
,
a
,
m
Szukane:
1
= f (x)
Początkowo układ w spoczynku.
Zadanie 4
– układ złożony
1. Zmiana energii kinetycznej
E
kin
w chwili
t
=0:
0
0
t
E
kin
E
kin
w chwili
t
:
t
E
t
E
t
E
t
E
t
E
m
kin
m
kin
m
kin
m
kin
kin
4
3
2
1
Zmiana
E
kin
w czasie od
t
=0 do
t
:
gdzie:
4
)
(
2
4
t
t
E
kin
więc:
t
= 0
x
=0
= 0
t
,
4
(t)
2
)
(
8
)
(
2
1
1
2
4
1
1
t
I
t
m
t
E
z
m
kin
1
3
4
C
4
3
1
2
1
2
)
(
2
2
2
2
t
I
t
E
z
m
kin
8
)
(
2
4
3
3
t
m
t
E
m
kin
2
)
(
2
4
4
4
t
m
t
E
m
kin
2
4
2
r
)
(
)
(
2
4
t
t
E
E
kin
kin
Zadanie 4
– układ złożony
UWALNIAMY od WIĘZÓW
NIE ROZDZIELAMY !!!!
2. Praca sił
siły i momenty sił wykonujące pracę :
1
1
3
4
,
,
,
sin
r
g
m
g
m
T
g
m
a
przemieszczenia :
praca sił :
)
(t
x
W
m
4
g
T
N
m
3
g
m
1
g
C
,
x
,
2
x
,
x
1
j
1
1
2
r
x
j
gdzie:
1
1
2r
x
j
Zadanie 4
– układ złożony
t
= 0
x
=0
= 0
3. Zmiana en. kinet. a praca sił
)
(
2
t
E
o
kin
)
(t
x
W
W
E
kin
zatem:
x
dt
dx
t)
(
)
(
)
(
2
t
x
t
o
Zadanie 4
– układ złożony
t
= 0
x
=0
= 0
3. Zmiana en. kinet. a praca sił
x
dt
dx
t)
(
dt
dx
x
dt
x
d
dt
d
t
a
2
1
)
(
2
2
const
dt
d
t
a
2
1
)
(
dt
const
d
C
t
const
t
)
(
stałą C wyznaczamy z warunku początkowego:
0
0
t
dla
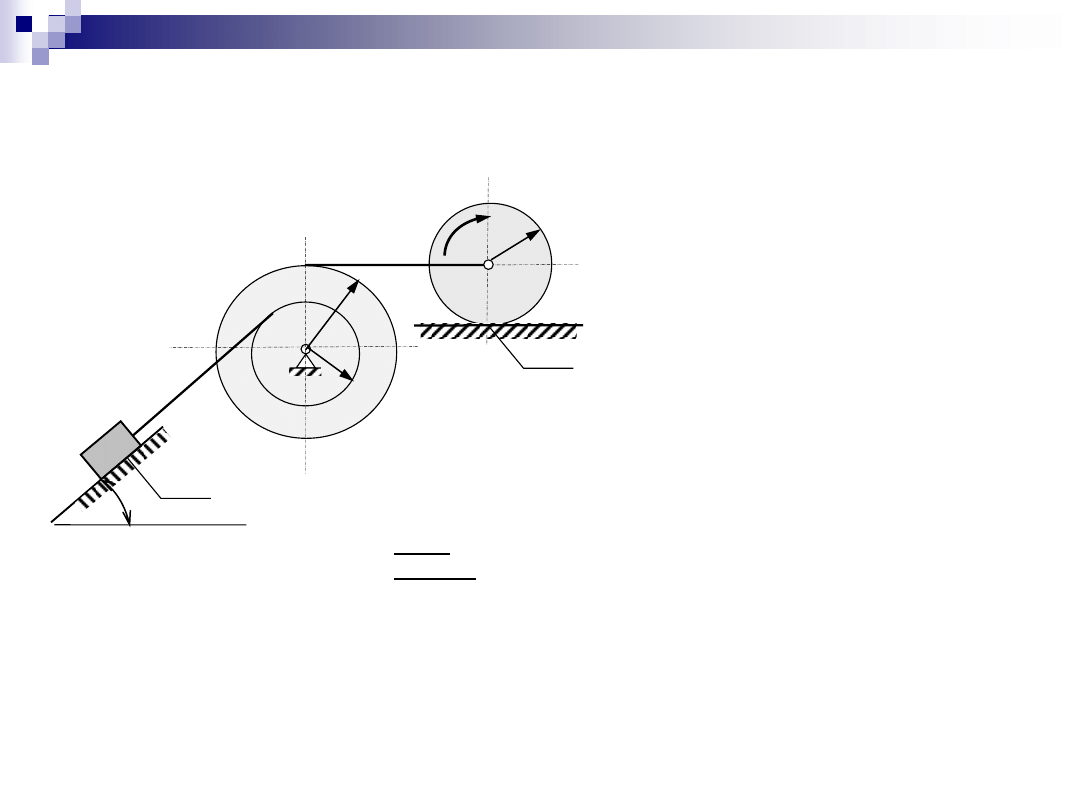
Zadanie 5
Zadanie 5
– układ złożony
UWALNIAMY od WIĘZÓW
NIE ROZDZIELAMY !!!!
O
2r
r
m
m
2m
R
m
a
m
f
M
Dwie liny, do
których przymocowano koło i ciężar, są nawinięte na
dwa zespolone,
współśrodkowe krążki zamocowane przegubowo w
punkcie O. Masy tych
krążków są równe m i 2m, a ich promienie
wynoszą r i 2r. W chwili początkowej układ znajdował się w
spoczynku.
Wyznaczyć przyspieszenie ciężaru m.
Dane:
m, r, R, f,
m
,
a
, M
Szukane:
a(t),
v(t),
x(t)
–
przyspieszenie,
prędkość
i
przemieszczenie
ciężaru
Koło ruchome o masie m i promieniu R toczy
się bez poślizgu po poziomym torze i jest
napędzane
stałym
momentem
M.
Współczynnik tarcia tocznego koła po torze
wynosi f. Na chropowatej
równi pochyłej o
kącie nachylenia
a
leży ciężar o masie m, a
współczynnik tarcia ślizgowego wynosi
m
.
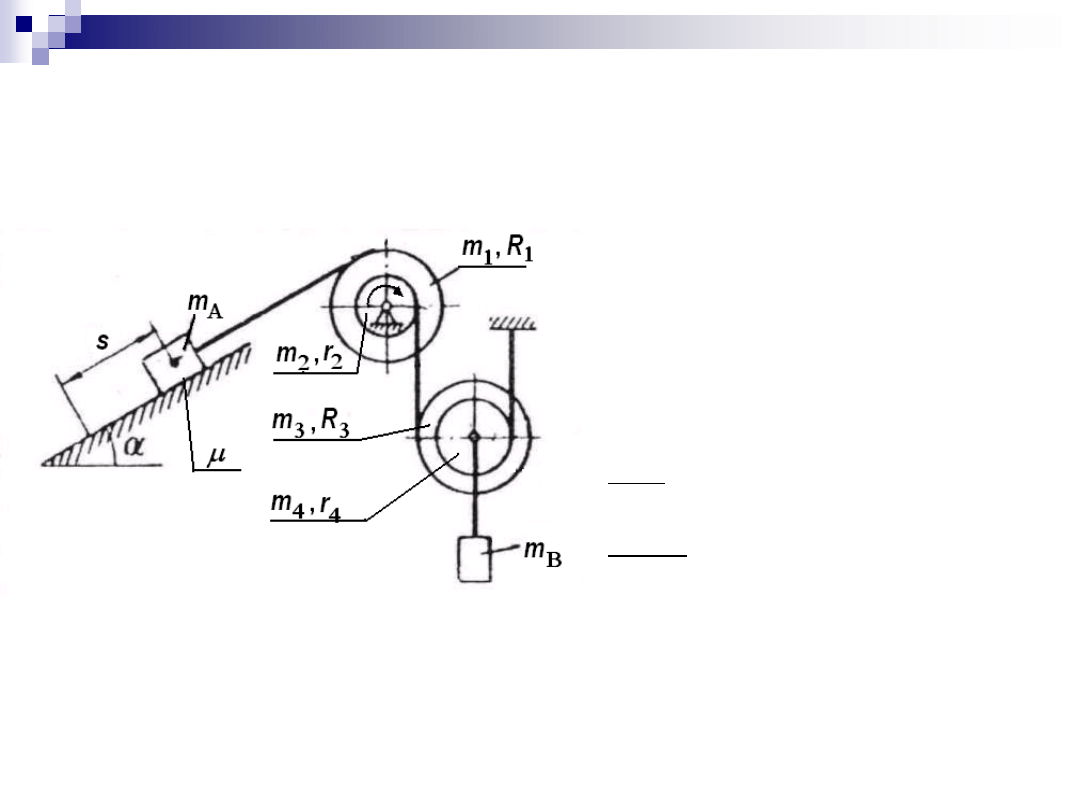
Zadanie 6
Zadanie 6
– układ złożony
UWALNIAMY od WIĘZÓW
NIE ROZDZIELAMY !!!!
Dla układu mechanicznego przedstawionego
na schemacie, wyznaczyć prędkość masy m
A
w funkcji drogi s. Założyć ruch masy m
A
w
górę równi.
Dane: m
1
, R
1
, m
2
, r
2
, m
3
, R
3
, m
4
,
r
4
,
m
A
, m
B
,
m
,
a
Szukane: v
mA
= f(s)
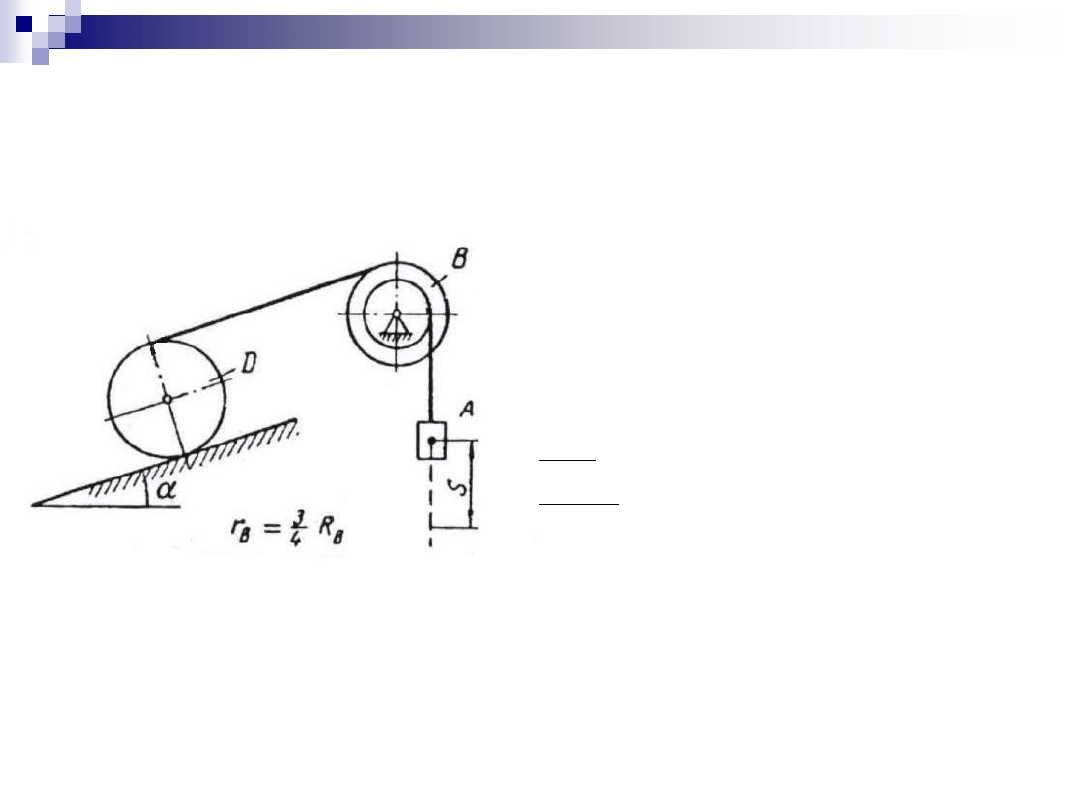
Zadanie 7
Zadanie 7
– układ złożony
UWALNIAMY od WIĘZÓW
NIE ROZDZIELAMY !!!!
Dla układu mechanicznego przedstawionego
na schemacie, wyznaczyć prędkość masy m
A
w
funkcji drogi s. Założyć ruch masy m
A
w dół.
Dane: m
A
,
m
B
, R
B
, r
B
,
m
D
,
r
D
,
f,
a
Szukane: v
mA
= f(s)
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron