
WYDZIAŁ MECHANICZNY ENERGETYKI I LOTNICTWA
POLITECHNIKI WARSZAWSKIEJ
Zakład Teorii Maszyn i Robotów
Laboratorium Podstaw Automatyki i Sterowania IV
Instrukcja do ćwiczenie nr 1
Laboratoryjny układ regulacji poziomu cieczy w zbiorniku
Dobór nastaw regulatorów
1 Wstęp
Celem ćwiczenia jest poznanie i przetestowanie szeregu metod doboru nastaw regulatorów
PID.
Przedmiotem analizy jest układ regulacji stałowartościowej poziomu cieczy w zbiorniku
otwartym, podzielonym na dwie części za pomocą ruchomej przegrody z otworami o różnych
przekrojach umożliwiających przepływ cieczy z jednej części zbiornika do drugiej.
Obiektem steruje
regulator PID zrealizowany za pomocą układów elektrycznych
Przed przystąpieniem do wykonywania ćwiczenia studenci powinni wykazać się wiedzą z
zakresu układów regulacji, regulatorów PID, a w szczególności powinni znać i rozumieć
następujące zagadnienia:
−
wskaźniki jakości regulacji;
−
odpowiedzi elementarnych członów automatyki na wymuszenia
skokowe i liniowo narastające;
−
odpowiedź regulatora PI na wymuszenie skokowe;
−
odpowiedź regulatora PD na wymuszenie liniowo narastające;
−
wpływ zmian nastaw P, I, D ciągłego regulatora PID na przebieg
procesu regulacji;
−
metody pomiaru poziomu cieczy;
−
sposoby doboru nastaw regulatora PID, w szczególności metodę
odpowiedzi skokowej.
2 Wprowadzenie teoretyczne
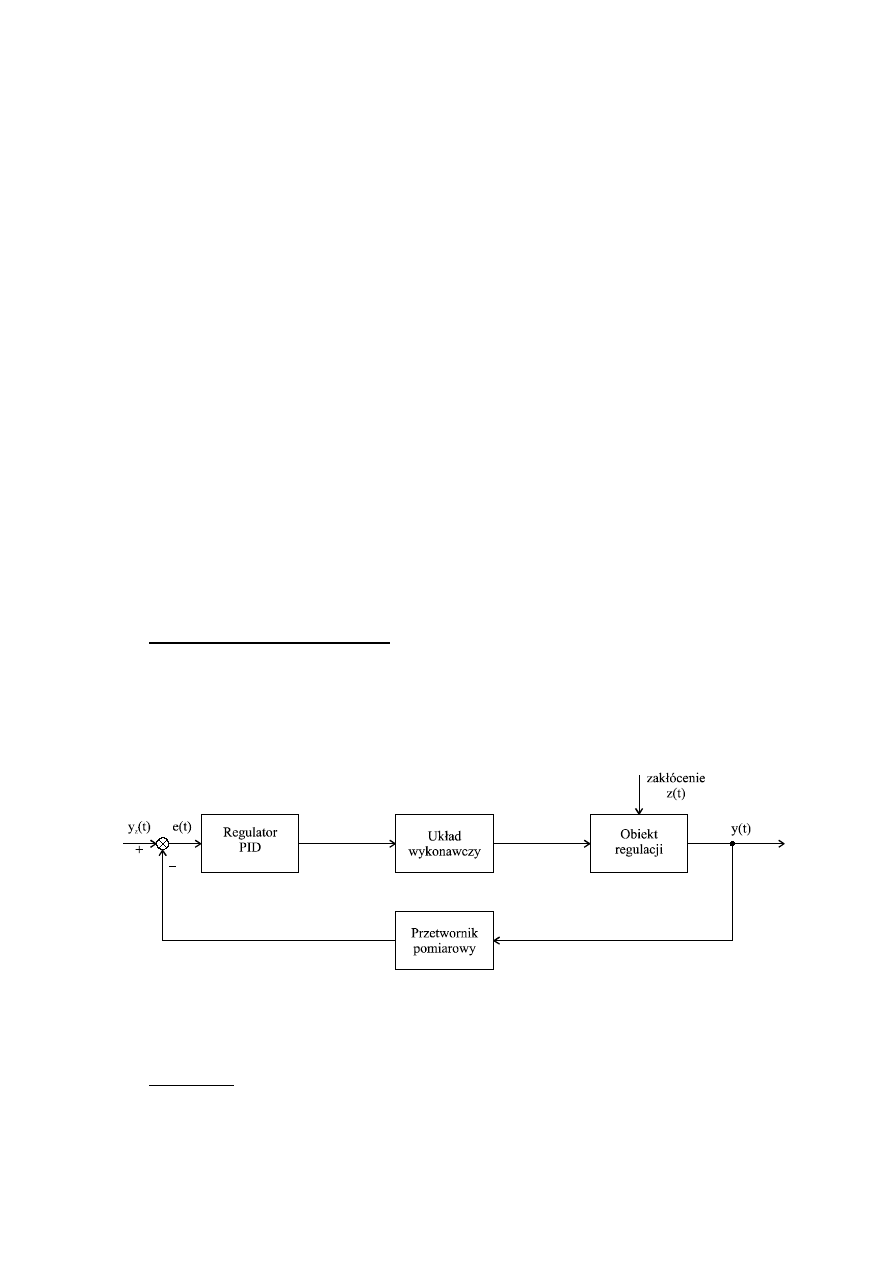
Regulacj
a automatyczna jest to sterowanie w układzie zamkniętym (z ujemnym
sprzężeniem zwrotnym) - rys. 1. Idea regulacji polega na porównywaniu sygnału zadanego
z
sygnałem na wyjściu obiektu i sterowaniu obiektem tak (na podstawie różnicy tych sygnałów -
uchybu),
aby uchyb był możliwie mały lub zerowy.
Układy automatycznej regulacji
Rys. 1
Schemat układu automatycznej regulacji
Regulatorem nazywa się w automatyce układ, który wytwarza sygnał sterujący proces
w
sposób zapewniający przebieg procesu zgodnie z pożądanym. W regulatorze typu PID
następuje wytworzenie sygnału sterującego o wartości zależnej od wartości uchybu regulacji
Regulatory
3
(akcja proporcjonalna –
P), czasu występowania uchybu (akcja całkująca – I) i szybkości jego
zmian (akcja różniczkująca – D).
Sygnał sterujący po ewentualnym wzmocnieniu steruje pracą urządzeń wykonawczych.
Wyróżnia się regulatory bezpośredniego działania (np. regulator bimetaliczny temperatury
w
żelazku) i regulatory pośredniego działania, korzystające z energii pomocniczej. Przy
klasyfikacji wg sygnałów wyjściowych rozróżnia się regulatory o wyjściu ciągłym i regulatory o
wyjściu dyskretnym. Regulatory obecnie stosowane w przemyśle z reguły mają napięciowe
sygnały wejściowe i wyjściowe i są wykonane w technice analogowej lub (coraz częściej)
cyfrowej. W szczególnych przypadkach (np. środowisko z zagrożeniem pożarowym) stosuje się
regulatory pneumatyczne, d
ziałające na sygnały ciśnienia. Coraz częściej stosuje się regulatory
zrealizowane programowo w komputerowych układach sterowania.
Na stanowisku laboratoryjnym wykorzystywany jest regulator ciągły PID do regulacji
poziomu i regulator dyskretny PID do regulacji temperatury.
Sygnał generowany przez ciągły regulator PID jest równy:
( )
( )
( )
+
+
=
∫
t
i
d
P
s
dt
t
e
T
dt
t
de
T
t
e
k
t
g
0
)
(
Odpowiedź na skok jednostkowy wartości zadanej układu automatycznej regulacji z
regulatorem P (proporcjonalnym) z reguły ma duże przeregulowanie i jest oscylacyjna. Czynnik
związany z pochodną sygnału błędu de(t)/dt w układzie z regulatorem PD (człon D) jest
odpowiedzialny za korekcję przeregulowania, zanim się pojawi. Stąd parametr T
d
Człon całkujący I minimalizuje błąd w stanie ustalonym, to znaczy zwiększa statyczną
dokładność regulacji. Dodanie tego członu powoduje zwiększenie rzędu układu, dlatego zapasy
stabilności systemu będą znacznie mniejsze, niż w przypadku zastosowania wyłącznie regulatora
PD. W niekorzystnym przypadku (duże wzmocnienie i mały czas zdwojenia) system może nawet
utracić stabilność.
nazywany jest
czasem wyprzedzenia. Przeregulowanie jest proporcjonalne do
pierwszej pochodnej błędu.
W regulatorze PID połączone jest działanie członu całkującego oraz różniczkującego.
Relacja 1/T
i
Regulator taki opisuje transmitancja:
ma w tym
regulatorze istotny wpływ na stabilność.
( )
+
+
=
s
T
s
T
k
s
G
d
i
P
r
1
1
k
P
T
–
współczynnik wzmocnienia
i
T
– czas zdwojenia
d
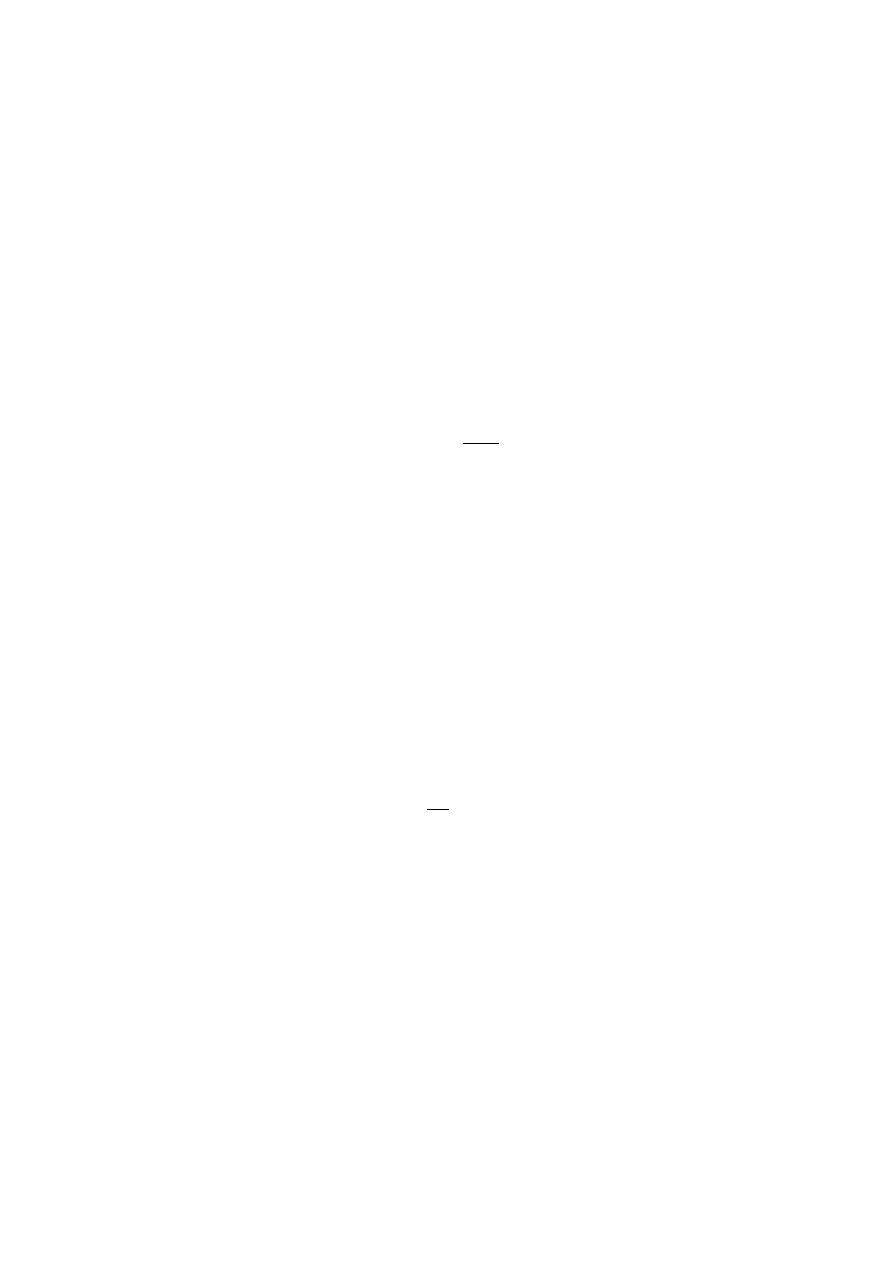
Czas zdwojenia (T
– czas wyprzedzenia
i
) określa szybkość zmian sygnału wyjściowego przy stałej wartości
sygnału uchybu; jest to czas, po którym sygnał wyjściowy regulatora PI osiąga (po wymuszeniu
skokowym) dwukrotnie większą wartość niż miałoby to miejsce w regulatorze typu P. Liczbowo
czas zdwojenia jest równy stałej czasowej całkowania członu całkującego (Rys. 2). Im dłuższy
czas zdwojenia ustawiony na regulatorze, tym słabsze jest działanie akcji całkującej.
4
Rys. 2
Odpowiedź regulatora PI na wymuszenie skokowe
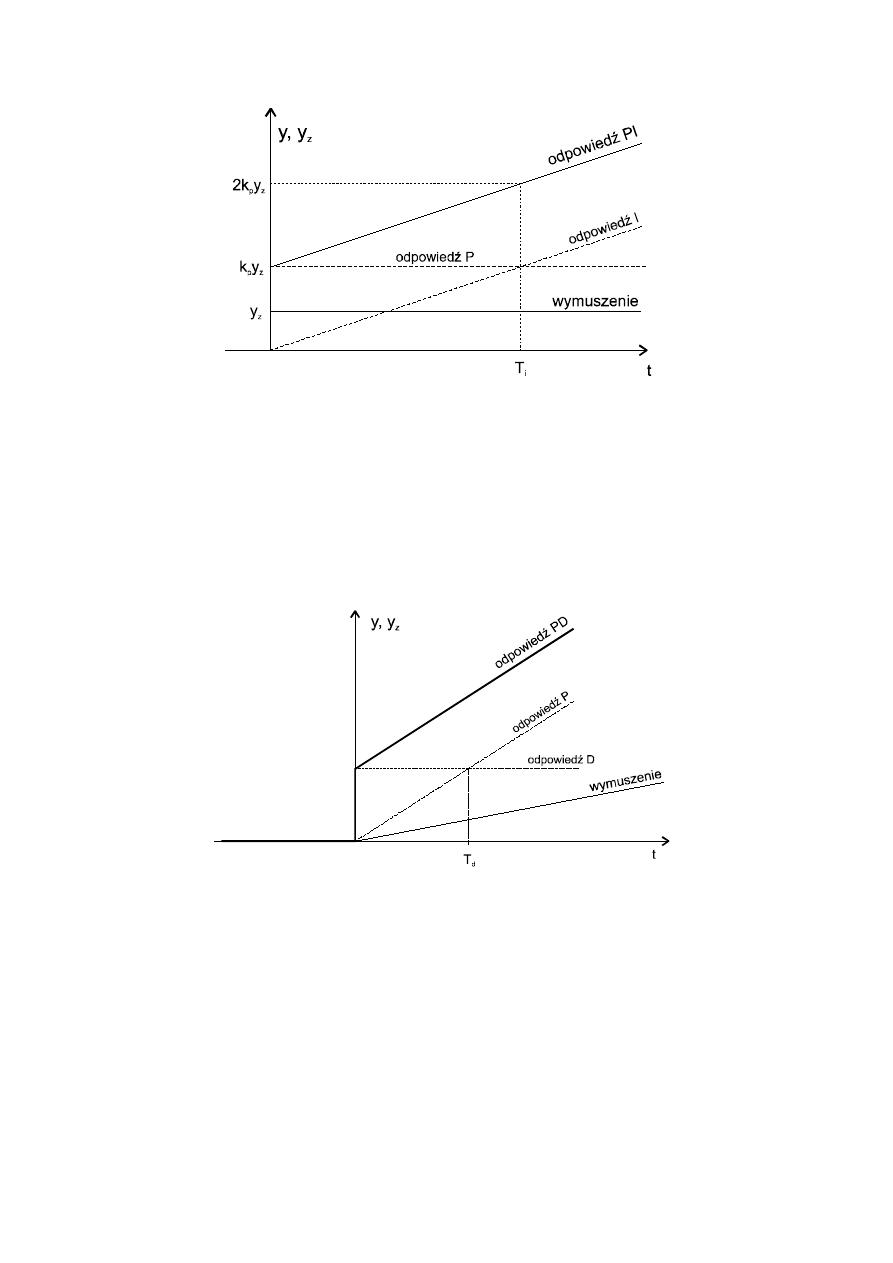
Czas wyprzedzenia (T
d
) określa właściwości różniczkujące regulatora i jest liczbowo
równy stałej czasowej różniczkowania. Różniczkowanie powoduje wprowadzenie do sygnału
wyjściowego regulatora składnika proporcjonalnego do szybkości zmian uchybu, więc
w
przypadku stałej szybkości zmian uchybu sygnał wyjściowy regulatora ulega jak gdyby
wyprzedzeniu w stosunku do składnika proporcjonalnego w sygnale regulatora (Rys. 3). Im
dłuższy czas wyprzedzenia, tym intensywniejsze jest działanie akcji różniczkującej regulatora.
Rys. 3
Odpowiedź regulatora PD na wymuszenie liniowo narastające
Działanie P regulatora zapewnia realizację elementarnego celu regulacji, tj. zmniejszenie
uchybu regulacji, jest jednak działaniem dość ryzykownym, ponieważ zmniejsza zapasy
stabilności układu.
Działanie I regulatora wprowadza efekt astatyzmu do układu regulacji umożliwiając
minimalizację uchybu statycznego regulacji (w stanie ustalonym). Zmniejszanie czasu zdwojenia
(równoznaczne zwiększaniu intensywności działania akcji całkującej) powoduje zmniejszenie
zapasu stabilności i może doprowadzić do utraty stabilności układu.
Działanie D tłumi chwilowe oscylacje proporcjonalne do prędkości zmian uchybu
zmniejszając przez to przeregulowanie.
5
Podstawowym zadaniem jakie należy osiągnąć projektując układ regulacji to zapewnienie
odpowiednich
zapasów stabilności. Umożliwi to poprawną (stabilną) pracę układu w przypadku
wystąpienia zakłóceń. Oprócz zapewnienia stabilności wymagane są własności układu dotyczące
dokładności statycznej, czasu regulacji i przeregulowania. Skrypt PAS [1] zawiera szerokie
omówienie wskaźników regulacji. W idealnym przypadku należałoby oczekiwać minimalnych
czasów regulacji, zerowych lub minimaln
ych przeregulowań i dużej dokładności statycznej. W
praktyce zadanie regulacji polega na osiągnięciu kompromisu między tymi wskaźnikami.
W
skaźniki jakości regulacji
Wyróżnia się następujące metody doboru nastaw:
Metody doboru nastaw regulatorów
-
metody oparte na znajomości modelu matematycznego obiektu regulacji;
-
metody oparte na pomiarze charakterystyk skokowych – identyfikacja obiektu;
-
metoda cyklu granicznego Zieglera – Nicholsa.
-
Inne np. met.
Astroma-Hagglunda
Metody oparte na znajomości modelu matematycznego regulacji są przydatne tylko wtedy
gdy dysponuje się odpowiednio dokładnym modelem obiektu. W praktyce jest to bardzo trudne i
dlatego metoda ta jest rzadko stosowana.
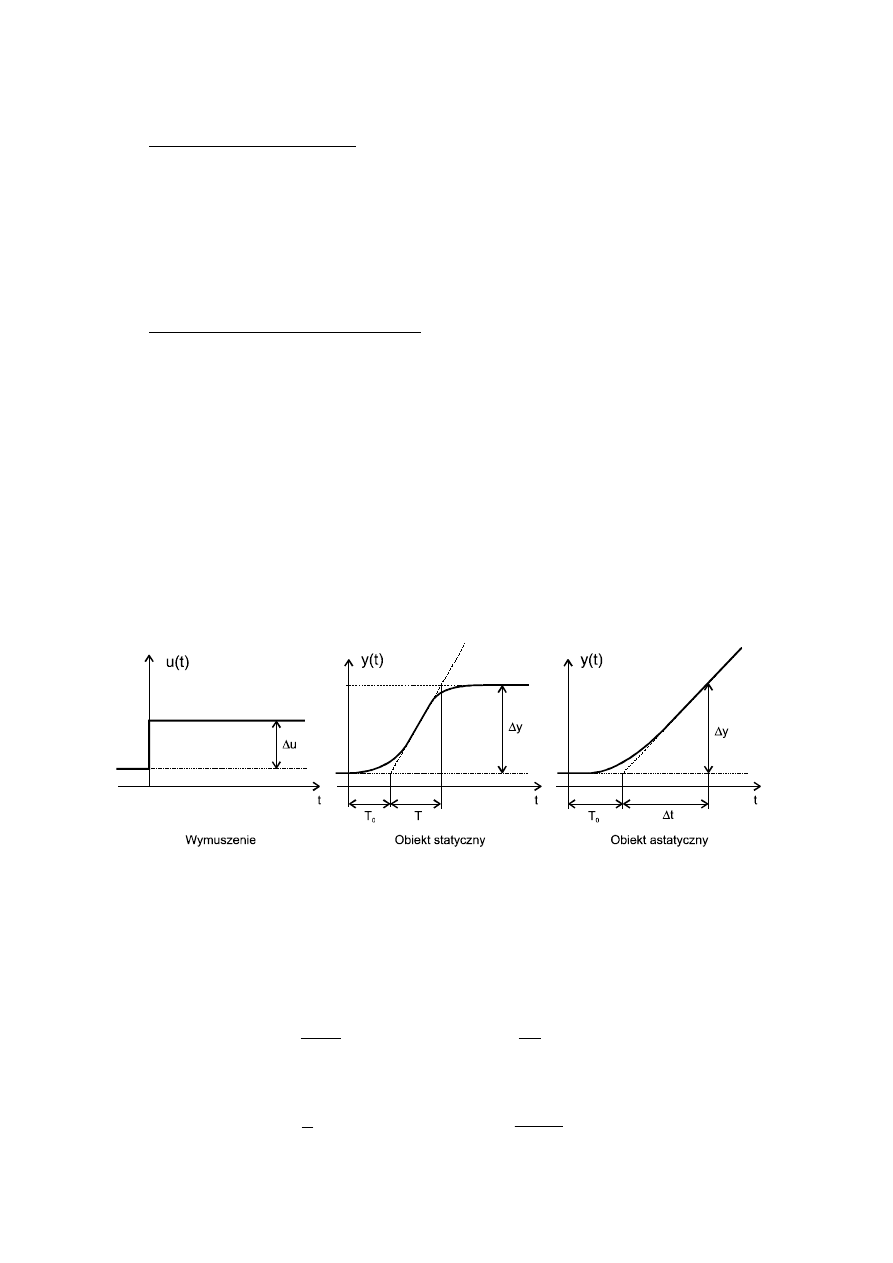
Metody oparte na pomiarze charakterystyk skokowych obiektu stosuje się do obiektów,
których przybliżony model matematyczny można aproksymować modelem obiektu inercyjnego
(wieloinercyjnego ) z opóźnieniem. Należy zaznaczyć, że większość obiektów występujących w
przemyśle można opisać w ten sposób. Metoda polega na podaniu sygnału wymuszenia
skokowego i rej
estracji odpowiedzi przy otwartej linii sprzężenia zwrotnego.
Rys. 4 Charakterystyki typowych obiektów regulacji
Na podstawie odpowiedzi skokowej obiektu określany jest jego przybliżony model.
Nastawy regulatora można dobrać korzystając z tablic 1. lub 2., przy czym:
dla obiektu statycznego
1
)
(
0
+
=
−
Ts
k
e
s
G
ob
s
T
u
y
k
ob
∆
∆
=
dla obiektu astatycznego:
s
k
e
s
G
s
T
0
)
(
−
=
y
t
u
T
c
∆
∆
⋅
∆
=
6
(wykorzystuje się tu oznaczenia wg Rys. 4)
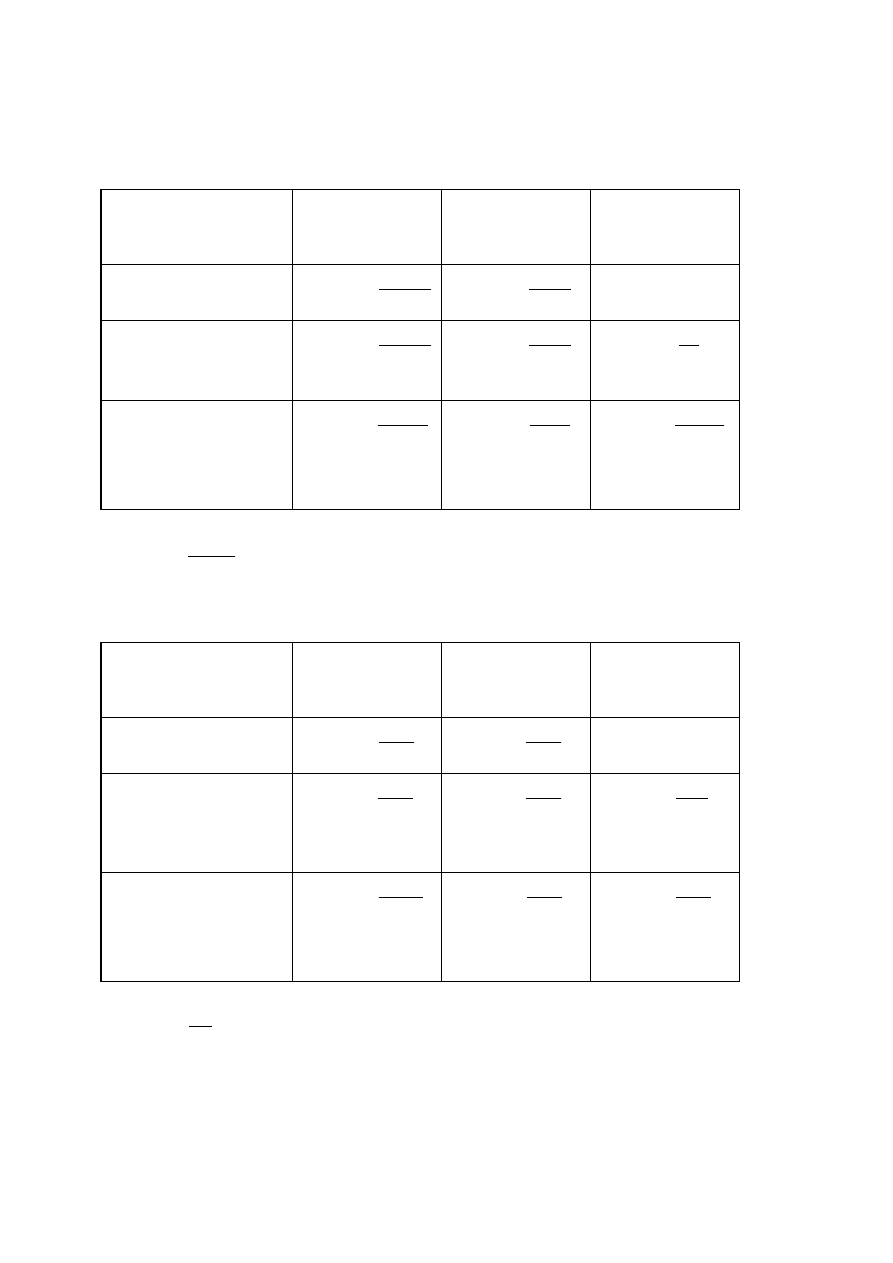
Tablica 1.
Nastawy regulatorów sterujących obiektami astatycznymi z opóźnieniem
Wskaźnik jakości
regulacji
Typ regulatora
κ
≈0%
min t
r
κ=20%
min t
r
min
∫e
2
(t)dt
P
o
C
P
T
T
k
37
.
0
=
o
C
P
T
T
k
7
.
0
=
PI
o
C
P
T
T
k
46
.
0
=
o
I
T
T
75
.
5
=
o
C
P
T
T
k
7
.
0
=
o
I
T
T
3
=
o
C
P
T
T
k
=
o
I
T
T
3
.
4
=
PID
o
C
P
T
T
k
65
.
0
=
o
I
T
T
5
=
o
D
T
T
23
.
0
=
o
C
P
T
T
k
1
.
1
=
o
I
T
T
2
=
o
D
T
T
37
.
0
=
o
C
P
T
T
k
36
.
1
=
o
I
T
T
6
.
1
=
o
D
T
T
5
.
0
=
y
t
u
T
C
∆
∆
⋅
∆
=
Tablica 2.
Nastawy regulatorów sterujących obiektami inercyjnymi z opóźnieniem
Wskaźnik
jakości regulacji
Typ regulatora
κ
≈0%
min t
r
κ=20%
min t
r
min
∫e
2
(t)dt
P
o
o
P
T
k
T
k
3
.
0
=
o
o
P
T
k
T
k
7
.
0
=
PI
o
o
P
T
k
T
k
6
.
0
=
T
T
o
I
.
0
8
.
0
+
=
o
o
P
T
k
T
k
7
.
0
=
T
T
T
o
I
3
.
0
+
=
o
o
P
T
k
T
k
=
T
T
T
o
I
35
.
0
+
=
PID
o
o
P
T
k
T
k
95
.
0
=
o
I
T
T
4
.
2
=
o
D
T
T
4
.
0
=
o
o
P
T
k
T
k
2
.
1
=
o
I
T
T
2
=
o
D
T
T
4
.
0
=
o
o
P
T
k
T
k
4
.
1
=
o
I
T
T
3
.
1
=
o
D
T
T
5
.
0
=
u
y
k
O
∆
∆
=
κ - przeregulowanie
t
r
∫e
- czas regulacji
2
(t)dt -
całka kwadratu uchybu
7
Opracowana w 1943 roku przez Zieglera i Nicholsa metoda umożliwia dobór nastaw
regulatorów bez znajomości modelu matematycznego obiektu. Metoda ta daje w typowych
warunkach przemysłowych poprawne rezultaty, chociaż są przypadki, w których takie nastawy
należy traktować jako pierwsze przybliżenie.
Istota metody polega na doprowadzeniu układu regulacji z regulatorem typu P
i
wymuszeniem skokowym do granicy stabilności przez stopniowe zwiększanie współczynnika
wzmocnienia k
p
aż do wystąpienia oscylacji niegasnących. W momencie wystąpienia oscylacji
niegasnących (granica stabilności) należy odczytać wzmocnienie krytyczne k
kryt
oraz zmierzyć
okres drgań T
kryt
Następnie należy skorzystać z danych liczbowych podanych w dostępnych w literaturze
tabelach w celu obliczenia nastaw dla odpowiedniego typu regulatora.
(dotyczy to odpowiedzi układu).
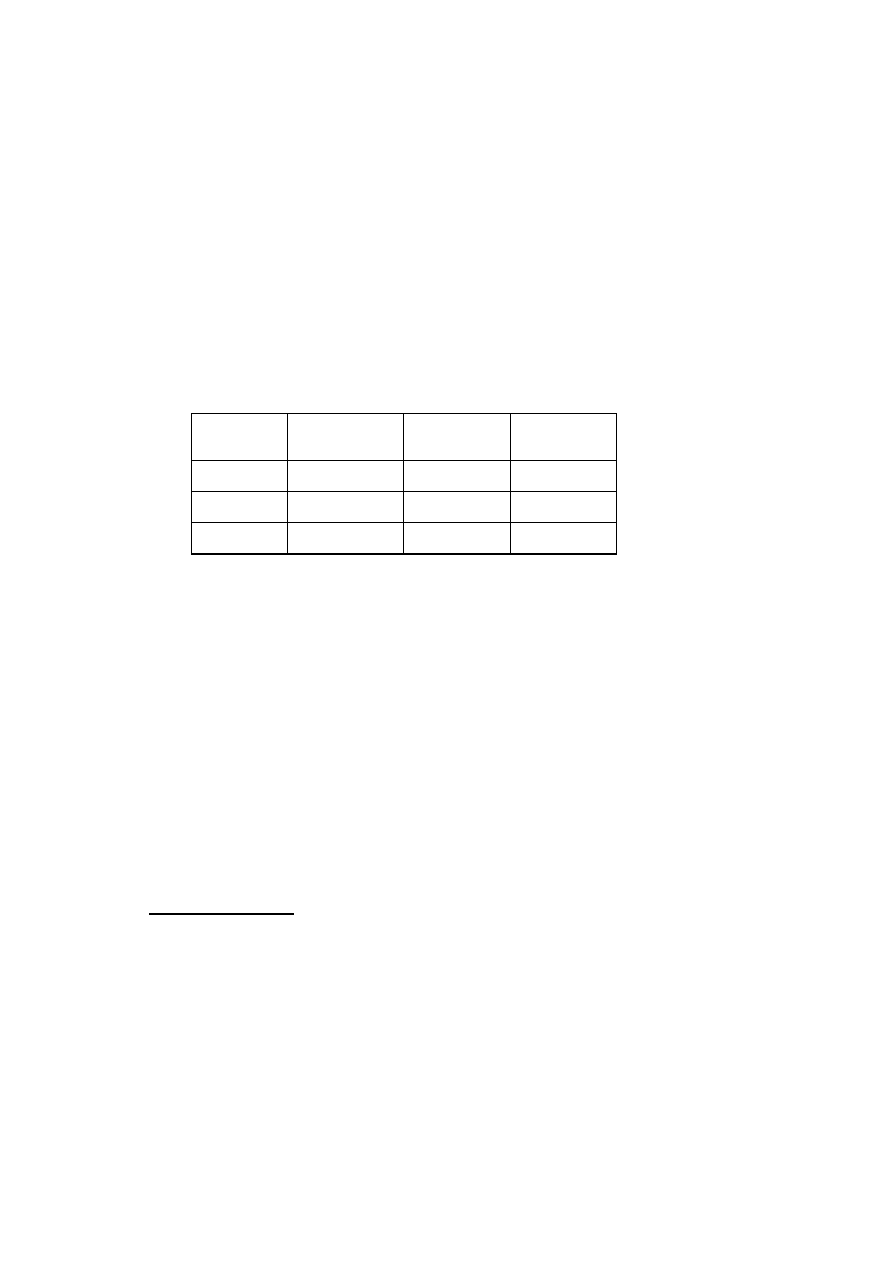
Tablica 3.
Tabela doboru nastaw regulatorów metodą Zieglera–Nicholsa (wg [1])
typ
regulatora
k
T
p
T
I
D
P
0,5 K
–
kryt
–
PI
0,45 K
0,85 T
kryt
–
kryt
PID
0,6 K
0,5 T
kryt
0,125 T
kryt
kryt
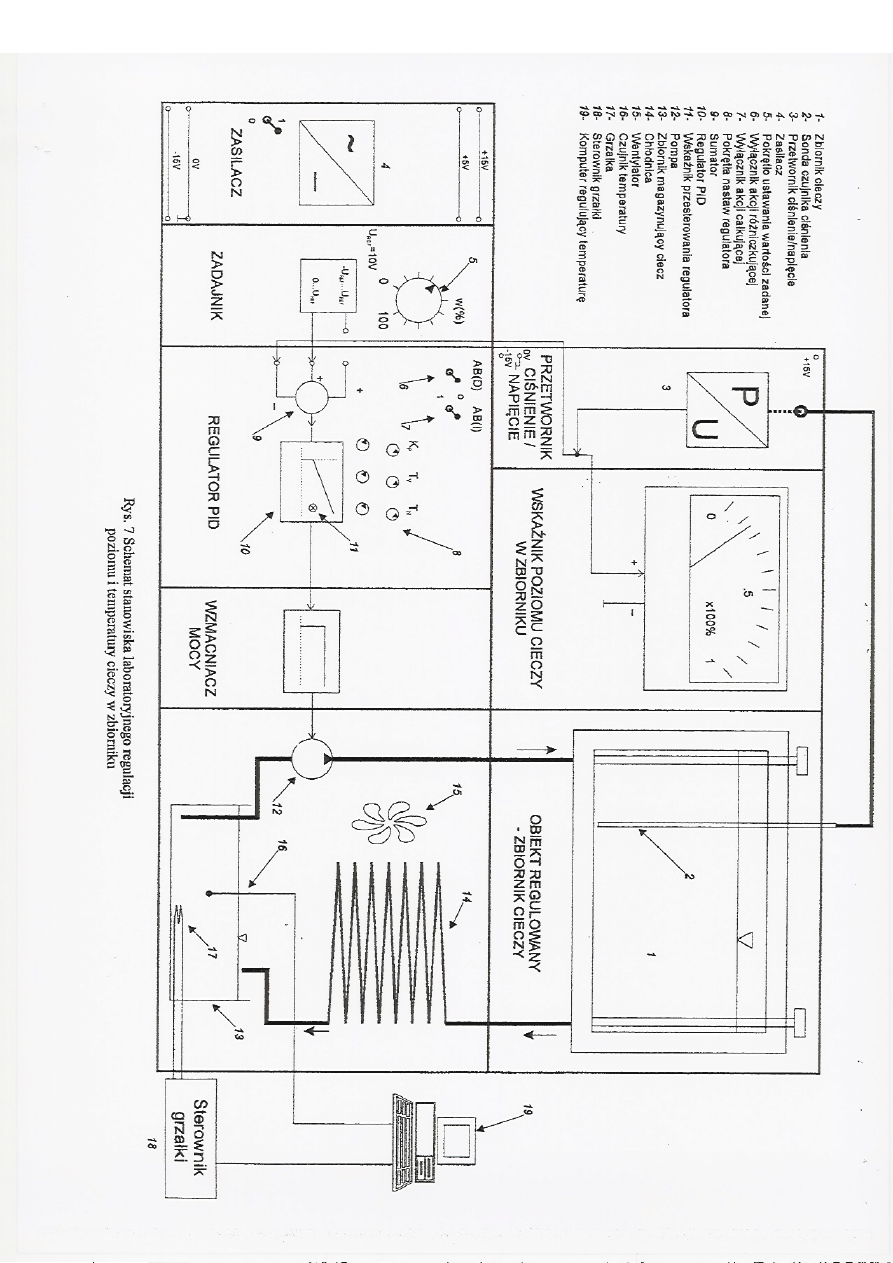
3 Opis stanowiska
Na stanowisku znajduje się zbiornik otwarty 1, podzielony na dwie części przy pomocy
wyjmowanej przegrody z otworami, przez które ciecz może przepływać pomiędzy częściami. Do
zbiornika 1
ciecz może być ze zbiornika magazynującego 13 pompowana pompą 12.
Na stanowisku pierwotnie zainstalowano dwa tory regulacji: tor regulacji poziomu i tor
regulacji temperatury. W chwili obecnej realizowana jest jedynie regulacja poziomu cieczy z
pominięciem analizy regulacji poziomu temperatury.
Regulacja poziomu i temperatury przebiega oddzielnie, a interakcje pomiędzy
parametrami traktowane są jako wzajemne zakłócenia, przy czym zmiany w nastawach wartości
zadanej poziomu wpływają na regulację temperatury, natomiast zmiany wartości zadanej
temperatury nie zakłócają regulacji poziomu. Schemat stanowiska przedstawiono na rysunku 7
dołączonym na końcu instrukcji.
Regulacja poziomu
Zmiana poziomu cieczy w zbiorniku 1
(rys. 7) i związana z tym zmiana ciśnienia
hydrostatycznego, powoduje zmianę ciśnienia powietrza w sondzie 2 przetwornika ciśnienie/
napięcie (P/U) 3. Przetwornik P/U 3 umieszczony jest w torze sprzężenia zwrotnego. Przetwornik
P/U jest tak wyskalowany, że przy zerowym poziomie wody w zbiorniku na wyjściu
przetwornika jest napięcie 0 V, a przy maksymalnym poziomie (dziesiąta kreska) napięcie na
wyjściu przetwornika wynosi 10V. Ewentualne różnice spowodowane zmianą ciśnienia
atmosferycznego należy przed rozpoczęciem ćwiczenia skorygować. Sygnał z przetwornika P/U
podawany jest na wejście (–) sumatora 9. W sumatorze sygnał z przetwornika porównywany jest
z wartością zadaną nastawnika 5. (Nastawnik przy nastawie 0 podaje napięcie 0V, przy nastawie
na dziesiątą kreskę 10V). Uchyb regulacji, będący różnicą sygnałów z zadajnika i przetwornika,
podawany jest na wejście regulatora PID 10. Maksymalna wartość napięcia na wyjściu
8
regulatora wynosi 10V. Sygnał wyjściowy regulatora po wzmocnienie prądowym steruje pracą
pompy 12.
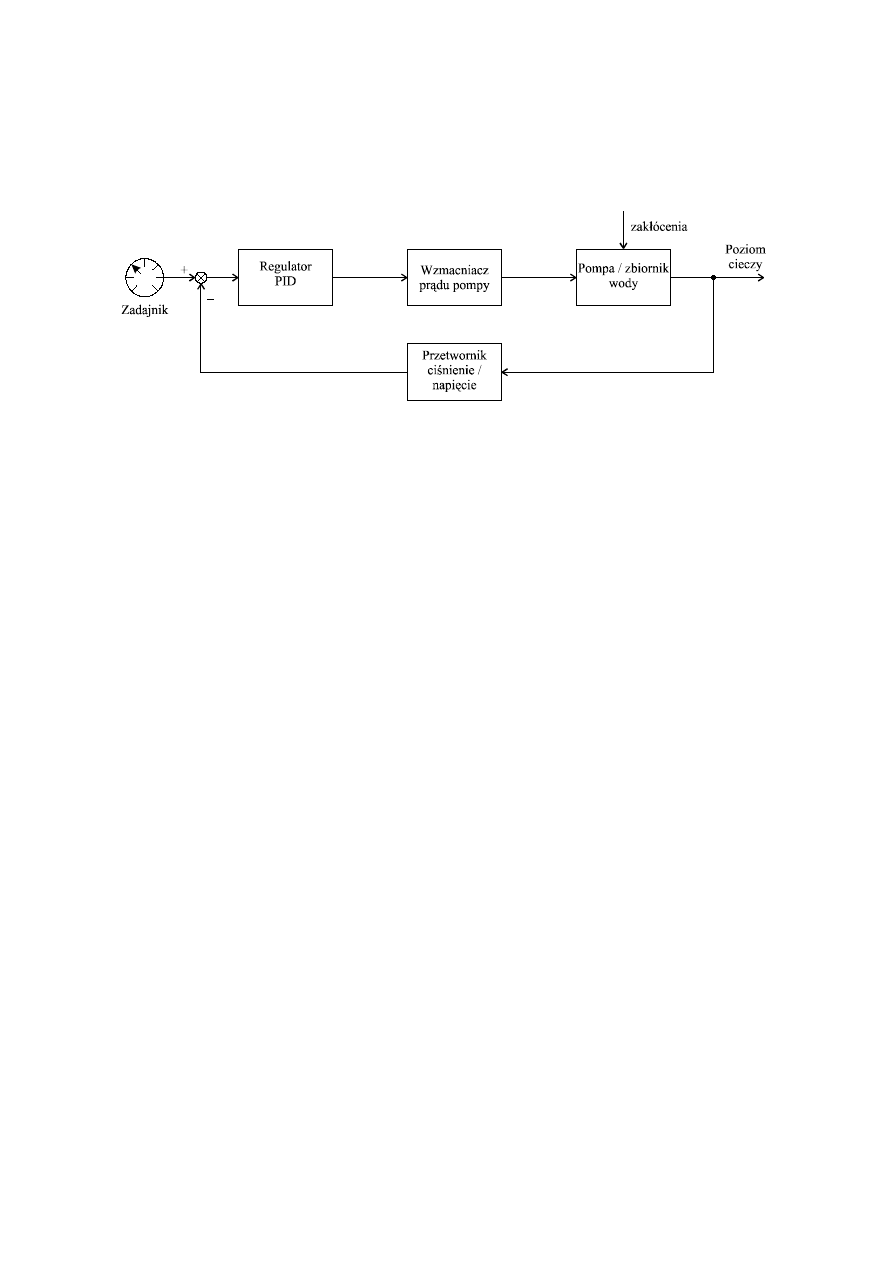
Zadaniem regulatora jest doprowadzenie uchybu regulacji do zera. Schemat ideowy toru
regulacji poziomu jest umieszczony na rys. 5.
Rys. 5 Schemat ideowy toru regulacji poziomu cieczy
4. Przebieg ćwiczenia
1) Badanie regulatora PID na przykładzie regulatora poziomu
UWAGA:
Oznaczenia pokręteł do wprowadzania nastaw regulatora PID na stanowisku są
następujące:
Czas zwojenia
T
i
= T
Czas wyprzedzenia
T
N
d
= T
a)
badanie i kalibracja regulatora P
(pomiar rzeczywistych napięć na wejściu
i
wyjściu regulatora typu P).
V
Nastawić dowolną wartość zadajnikiem wartości zadanej poziomu. Linia sprzężenia
zwrotnego powinna być przerwana, działanie różniczkujące i całkujące regulatora wyłączone.
Nastawić taki współczynnik wzmocnienia P, aby spodziewana wartość napięcia na wyjściu nie
przekroczyła 10V. Zmierzyć napięcia na zadajniku i wyjściu regulatora woltomierzem
cyfrowym. Obliczyć rzeczywisty współczynnik wzmocnienia regulatora.
W sprawozdaniu podać procentową różnicę pomiędzy wartością nastawianą oraz
rzeczywistą wzmocnienia. Opisać, co się dzieje, gdy iloczyn wartości wejściowej napięcia
przez
wzmocnienie jest większy od około 13V.
b)
badanie i kalibracja regulatora PI
Linia sprzężenia zwrotnego przerwana, działanie różniczkujące i całkujące (!)
wyłączone.
Nastawić wartość współczynnika wzmocnienia ok. 1—4 i czas zdwojenia regulatora
ok. 2—6 s.
Odłączyć blok nastawiania wartości zadanej od regulatora. Zadajnikiem wartości
zadanej poziomu ustawić napięcie o wartości 1—3 V. Zmierzyć woltomierzem wielkość
wartości zadanej. Włączyć akcję całkującą i uruchomić program SCOPE.
Podać wartość zadaną do regulatora. Za pomocą programu SCOPE zarejestrować
odpowiedź regulatora na wymuszenie skokowe.
Wyznaczyć z wykresu czas zdwojenia, porównać z nastawionym. Powtórzyć dla innej
nastawy czasu zdwojenia bez zmian pozostałych nastaw. Każdorazowo przed podłączeniem
wartości zadanej różnej od 0V wyłączyć na kilka sekund działanie całkujące regulatora.

9
W sprawozdaniu podać procentową różnicę pomiędzy wartością nastawianą oraz
rzeczywistą czasu zdwojenia oraz opisać sposób jego wyznaczania. Porównać odpowiedź
teoret
yczną i rzeczywistą regulatora PI na wymuszenie skokowe. Podać charakter i przyczyny
rozbieżności.
c)
badanie działania regulatora PD
Linia sprzężenia zwrotnego przerwana, działanie całkujące wyłączone. Nastawić
dowolną wartość współczynnika wzmocnienia i czasu wyprzedzenia.
Pokrętłem wartości zadanej wprowadzać wymuszenia skokowe rosnące i malejące
o
różnej amplitudzie. Za pomocą programu SCOPE zarejestrować odpowiedź regulatora PD
na wymuszenie skokowe. Porównać odpowiedź rzeczywistą członu różniczkującego
z
odpowiedzią regulatora.
W sprawozdaniu opisać charakter i przyczyny rozbieżności.
2) Dobór nastaw regulatora
a)
metoda odpowiedzi skokowej
Przy przerwanej linii sprzężenia zwrotnego podać skokowy sygnał wymuszający
z zadajnika (z
pominięciem regulatora lub po ustawieniu regulatora typu P na wzmocnienie
równe 1) na wejście obiektu (wzmacniacz). Do obliczenia optymalnych nastaw regulatora
konieczne jest zarejestrowanie odpowiedzi obiektu na ten sygnał.
Za względu na stany nieustalone układu oraz na nieliniowość pompki konieczne jest
zadanie na wejście układu skoku w określonych warunkach. Należy zrobić to następująco:
Rozłączyć linię sprzężenia zwrotnego. Ustawić regulator P na wzmocnienie równe 1
lub wyłączyć regulator z obwodu. Ustalić poziom cieczy w zbiorniku na wartość ok. 5—10%.
Dobrać taką wartość napięcia zadanego, aby poziom cieczy nie zmieniał się więcej, niż
około 2% na minutę. W praktyce oznacza to, że nie można zaobserwować ciągłych
widocznych zmian poziomu. Zanotować wartość u
1
Uruchomić program SCOPE i zadać skokowy wzrost napięcia zadanego do
maksymalnej wartości. Rejestrować zmiany poziomu cieczy. Uważać, aby nie doprowadzić
do przepełnienia zbiornika. Zanotować wartość napięcia u
napięcia doprowadzonego do
wzmacniacza pompy.
2
Na podstawi
e analizy uzyskanego wykresu zidentyfikować obiekt regulacji jako
statyczny lub astatyczny. Następnie na podstawie przykładowych wykresów z rys. 4.
wyznaczyć odpowiednie parametry obiektu. Potem wg tabeli 1. lub 2. należy dobrać nastawy
regulatora P oraz P
I i zbadać pracę układu regulacji.
.
Należy porównać uchyb statyczny dla obu regulatorów. Uchyb ustabilizowany należy
zmierzyć z pomocą woltomierza cyfrowego w stanie, gdy po zmianach parametrów wygasną
oscylacje uchybu. Wartości uchybu statycznego należy wyrażać procentowo w odniesieniu do
wartości zadanej.
Należy również porównać przeregulowanie w układzie z regulatorem P oraz PI.
W sprawozdaniu należy zawrzeć opis powyższej metody, wyznaczone parametry
obiektu oraz wyznaczone optymalne nastawy z zaznaczen
iem, wg jakiego wskaźnika
regulacji zostały obliczone. Należy też obliczyć procentową różnicę uchybu statycznego
regulatora P i PI, wyciągnąć wnioski z tej różnicy. Należy w sprawozdaniu zawrzeć
informację, czy rzeczywiste przeregulowanie w układzie nie przekroczyło przeregulowania
wynikającego z danych w tablic 1. lub 2. Jeżeli nastąpiło przekroczenie, to należy opisać
przyczyny.
b)
metoda Zieglera – Nicholsa

10
Przy zamkniętej pętli sprzężenia zwrotnego, doprowadzić układ do oscylacji
zwiększając wzmocnienie, zarejestrować za pomocą programu SCOPE okres oscylacji.
Dokładną wartość wzmocnienia krytycznego wyznaczyć na podstawie ilorazu wartości
zadanej i
wartości na wyjściu regulatora.
Według tabeli dobrać nastawy k
p
, T
i
, T
d
c)
porównanie obu metod na podstawie wskaźników regulacji
, zbadać zachowania regulatora na skok
wartości zadanej, zarejestrować odpowiedź układu dla trzech wymuszeń wartości zadanej.
Należy porównać dokładność statyczną oraz przeregulowanie.
5. Sprawozdanie
Sprawozdanie powinno zawierać wszystkie wcześniej wskazane obliczenia i ich wyniki,
a
także zarejestrowane podczas ćwiczenia wykresy i odczyty wartości. Proszę zwrócić uwagę na
podawanie mian wszystkich wartości. Niezbędne są też wnioski dotyczące porównania działania
regulatorów P i PI, wskaźników jakości regulacji oraz inne, dotyczące przebiegu ćwiczenia.
6 Literatura
[1]
Zarys dynamiki i automatyki układów. red. A. Olędzki, WPW, Warszawa, 1988
[2]
Poradnik inżyniera. Automatyka. red. W. Findeisen, WNT, Warszawa, 1973
11
Document Outline
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron