Logistyka - nauka
Logistyka 6/2013
383
Bohdan Pac
1
, Ryszard Zadrąg
2
Wstęp
Transport morski stanowi jedną z najpojemniej-
szych i najtańszych gałęzi transportu, dlatego też jest
on szeroko wykorzystywany do przemieszczania towa-
rów na duże odległości między poszczególnymi porta-
mi załadowania i wyładowania, stanowiąc zazwyczaj
strategiczny odcinek w przewozach multimodalnych,
intermodalnych i kombinowanych. Istotnym elemen-
tem infrastruktury punktowej tego transportu są porty
morskie będące aktualnie kombinacją różnego rodzaju
morskich terminali przeładunkowych, poczynając od
masowych, poprzez drobnicowe, kontenerowe na pro-
mowych kończąc. Sprawność operacyjna transportu
morskiego uzależniona jest nie tylko od rodzaju statku,
jego ładowności i prędkości przemieszczania, ale rów-
nież od potencjału portu morskiego, który będzie się
wyrażał poprzez:
- odpowiednią przestrzeń oraz długość nabrzeży
zdolnych do przyjęcia określonego taboru
morskiego;
- lokalizację, czyli usytuowanie na styku obszaru
lądowego i morskiego bądź w jego sąsiedztwie
(ujście rzeki lub zatoka) oraz funkcjonującą in-
frastrukturę i suprastrukturę przeznaczoną do
jego obsługi, często decydującą o typie portu
oraz jego wyposażeniu, szczególnie jeśli cho-
dzi o akwatorium portowe;
- wyposażenie, czyli o odpowiednie składniki in-
frastruktury technicznej, głównie transportowej
i suprastruktury, a także konieczne do prowa-
dzenia wielozmianowej działalności operacyj-
nej zasoby personelu o odpowiednich kwalifi-
kacjach i umiejętnościach zawodowych oraz
technologię i organizację operacji przeładun-
kowo – magazynowych;
1
dr Bohdan Pac, Wyższa Szkoła Bankowa Gdańsk
2
dr inż. Ryszard Zadrąg, Politechnika Gdańska
- operacje logistyczne, zorientowane na realiza-
cję zadań transportowych z zakresu przeładun-
ku i przemieszczania rzeczy i osób, zmieniają-
cych tam w ramach cyklu transportowego śro-
dowisko z lądowego na morskie lub na od-
wrót.
3
Wielokryterialną ocenę potencjału portu mor-
skiego należy rozpocząć od zbadania jego możliwości
operacyjnych wynikających ze sprawności obsługi
zawijających jednostek oraz stopnia wykorzystania
dostępnych nabrzeży portowych. Zróżnicowanie prze-
pływającego wolumenu ładunków przez morskie porty
handlowe, tworzy przesłankę do analizy tego potencja-
łu w kontekście istniejących na ich terenie morskich
terminali przeładunkowych. O płynności operacyjnej
terminala będzie decydować nie tylko ilość obsługiwa-
nych statków w odpowiedniej perspektywie czasowej,
ale też liczba jednostek oczekujących na redzie oraz
dobowy stopień wykorzystania nabrzeży przeładunko-
wych.
Do badania wybrano Głębokowodny Terminal
Kontenerowy ( Deep Water Container Terminal)
w Porcie Gdańskim. Problem badawczy dotyczył okre-
ślenia efektywności i stabilności dobowego wykorzy-
stania nabrzeży przeładunkowych. Powyższą stabil-
ność i efektywność oceniono poprzez wprowadzenie
miernika oceny decyzji, jakim jest wskaźnik zajętości
nabrzeża. Dane o ruchu jednostek pozyskano z Syste-
mu Automatycznej Identyfikacji Danych AIS (Auto-
matic Identification System) będącego źródłem infor-
macji m.in. o ruchu jednostek w DCT dla centrum kon-
troli i nadzoru ruchu statków VTS (Vessel Traffic Se-
rvice) w Zatoce Gdańskiej. Rozwiązanie problemu
badawczego polegało na wykonaniu kilku zadań ba-
dawczych polegających na:
- przeprowadzeniu obserwacji dobowego ruchu
jednostek pływających w DCT wykorzystując
dane z systemu AIS (jako ograniczenie przyję-
to okres obserwacji wynoszący 60 dni);
3
A.S. Grzelakowski, M.Matczak, Współczesne porty mor-
skie, funkcjonowanie i rozwój, Akademia Morska w Gdyni,
Gdynia 2012, s. 11.
Model koncepcyjny kontroli ruchu jednostek pływających
w portach morskich z wykorzystaniem metod symulacyjnych
Logistyka 6/2013
384
Logistyka - nauka
- badaniu częstotliwości wchodzących jednostek
w funkcji ich długości oraz czasu ich obsługi
w terminalu;
- dokonaniu symulacji ruchu jednostek pływa-
jących obsługiwanych w DCT na kolejne 16
dni na podstawie przeprowadzonych obserwa-
cji (narzędziem, jakie wykorzystano do reali-
zacji tego zadania była metoda Monte Carlo
służąca do symulacji stanów i procesów
gospodarczych);
- zdefiniowaniu zasadniczego miernika po-
dejmowania decyzji jakim jest wskaźnik
zajętości nabrzeża oraz ocena stabilności
działalności operacyjnej DCT na podstawie
zmian tego wskaźnika w funkcji czasu.
Charakterystyka Głębokowodnego
Terminala Kontenerowego (DCT)
Przedmiotem badań był ruch jednostek w Głę-
bokowodnym Terminalu Kontenerowym (DCT), zlo-
kalizowanym w Porcie Północnym. DCT to najnowo-
cześniejszy terminal kontenerowy w Polsce o po-
wierzchni 44 ha, który rozpoczął swoje funkcjonowa-
nie w czerwcu 2007 roku. Instalacja ta ze względu na
swoje położenie stanowi istotny element systemu logi-
stycznego polskiej gospodarki morskiej i całego kraju.
O standardach działania oraz kierunkach rozwoju
DCT zadecydowały następujące czynniki:
- współpraca DCT z Maersk Line, dzięki której
do terminala zawijają co tydzień od 2011 roku
największe na świecie kontenerowce, takie jak:
MS „Evelyn Maersk”, MS „Emma Maersk”,
MS „Eleonora Maersk”, MS „Elba Maersk”
i MS „Eugen Maersk”;
- osiągnięcie przez DCT Gdańsk w czerwcu
2011 roku pierwszego miliona przeładunków
(milionowy kontener wpłynął do Gdańska na
statku MS „Emma Maersk’’);
- inicjatywa budowy Pomorskiego Centrum Lo-
gistycznego w sąsiedztwie DCT. Wielofunk-
cyjne centrum logistyczne jest finansowane
i budowane przez australijską Grupę Good-
man. Wstępna koncepcja zagospodarowania
przewiduje nawet do 500 tysięcy m² po-
wierzchni magazynowych oraz do 40 tysięcy
m² powierzchni biurowej. Rozwój centrum lo-
gistycznego ma
być połączony z rozbudową okolicznej infra-
struktury komunikacyjnej, m.in. Trasy Su-
charskiego, tunelu pod Martwą Wisłą i Połu-
dniowej Obwodnicy Gdańska. Zaletą centrum
będzie przede wszystkim bezpośrednie połą-
czenie z nowoczesnym głębokowodnym ter-
minalem kontenerowym DCT Gdańsk
- Wprowadzenie nowego zintegrowanego sys-
temu
operacyjnego
avis
SPARCS
4
w czerwcu 2011 roku, umożliwiającego kom-
pleksowe zarządzanie działalnością operacyjną
terminala;
- zaimplantowanie w lipcu 2011 narzędzia
E-SMART przeznaczonego do wizualnego za-
rządzania sprzętem i wyposażeniem.
4
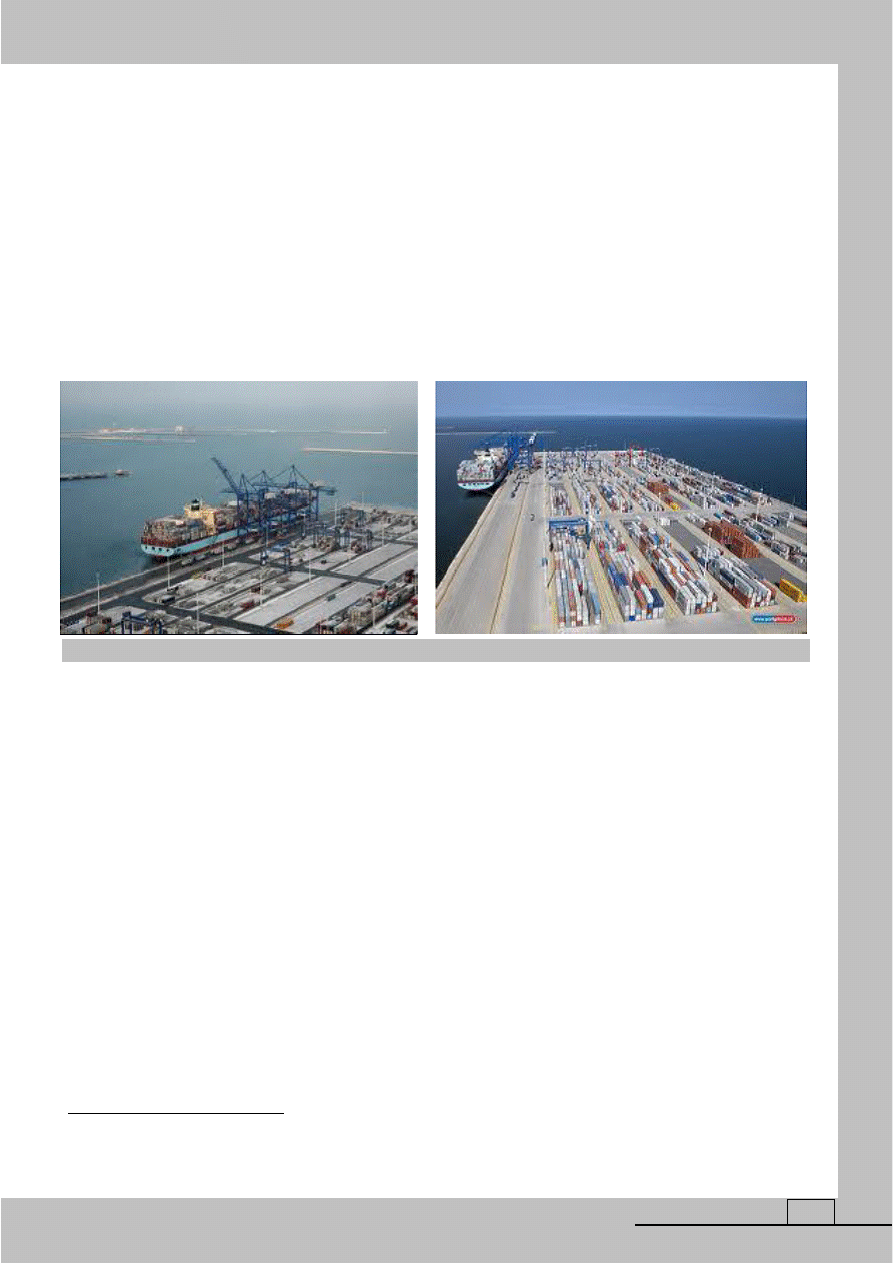
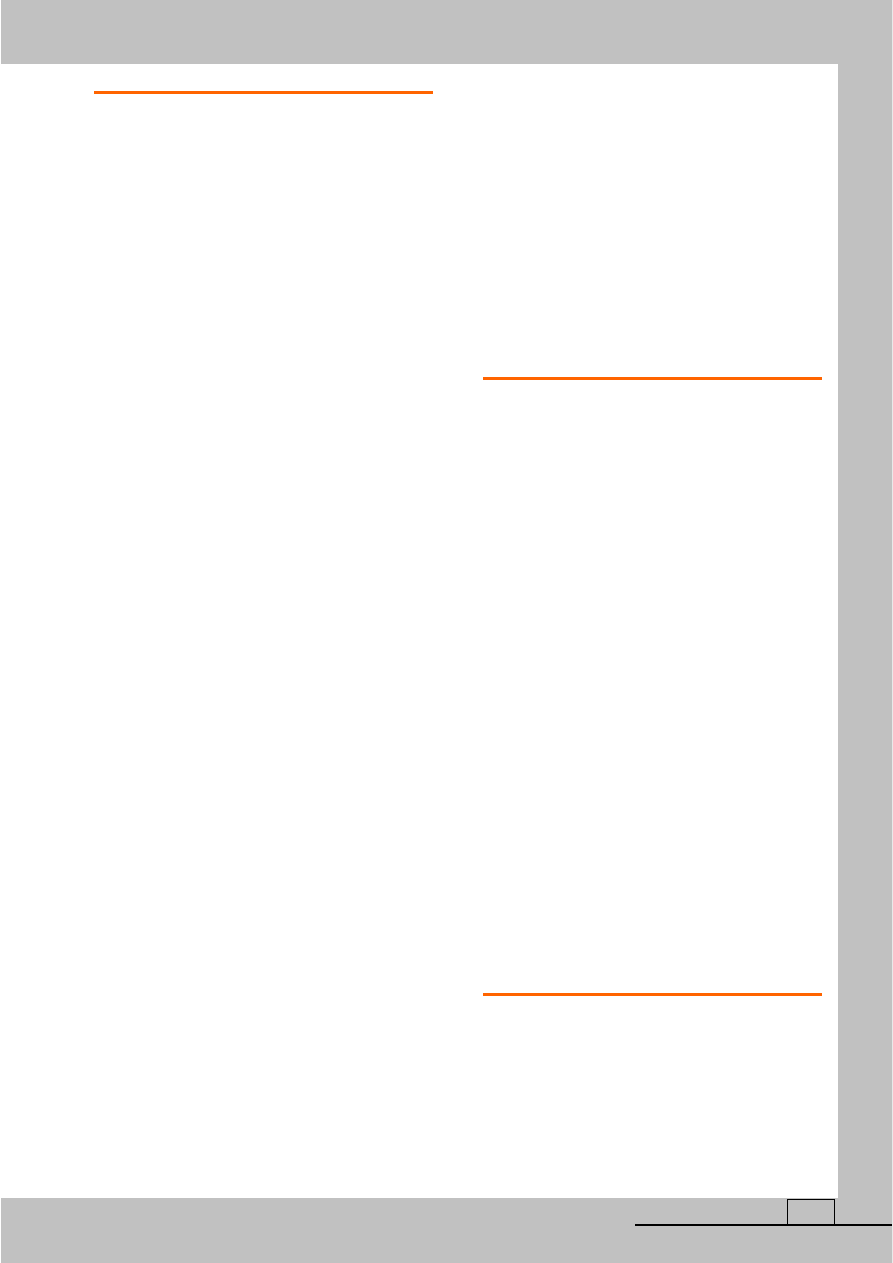
W zakresie możliwości przyjmowania i obsługi
statków DCT Gdańsk jest wyposażony w nabrzeże
o długości 650 m, szerokości 315 m i całkowitej po-
wierzchni 21 ha (rys. 1). W ramach tego potencjału
zorganizowano dwa stanowiska do obsługi jednostek
pływających. Pierwsze o długości 385 m i głębokości
16,5 m (zanurzenie wchodzących statków do 15 m)
oraz drugie o długości 265 m i głębokości 13,5 m, wy-
posażone w rampę ro-ro o szerokości 40 m.
Pozostały istotny potencjał DCT Gdańsk to:
- 5 suwnic typu STS i 13 typu RTG;
- 5 hektarów utwardzonych placów składowych
przeznaczonych do składowania ładunków Ro-
Ro i innych (pojemność ok. 22,5 tys TEU);
- magazyn konsolidacyjny (o pow. 7200 m²)
z rampą samochodową, oraz miejscem prze-
znaczonym do jego dalszej rozbudowy;
- parking dla ponad 100 samochodów ciężaro-
wych wraz z zapleczem sanitarnym;
- skomunikowanie z krajową siecią kolejową
i drogową oraz bliskość lotniska Gdańsk Rę-
biechowo.
5
Od 2012 roku możliwości przeładunkowe DCT
Gdańsk osiągnęły 1 mln TEU.
Zastosowanie systemu automatycznej
identyfikacji statków AIS
Jak już wspomniano we wstępie, punktem wyj-
ściowym do rozwiązania problemu badawczego była
realizacja pierwszego zadania polegającego na zebra-
niu danych o ruchu jednostek wchodzących i wycho-
dzących z DCT. Przedmiotowe dane pozyskano na
podstawie informacji pochodzących z bazy VTS dla
4
www.dctgdansk.pl
5
J. Najder Rozwój polskich portów morskich, Uniwersytet
Gdański, 2013, s. 15.
Logistyka - nauka
Logistyka 6/2013
385
Zatoki Gdańskiej, której elementem jest System Auto-
matycznej Identyfikacji statków (AIS), zapewniający
automatyczną wymianę danych, przydatnych do unika-
nia kolizji między statkami oraz identyfikujący statek
dla brzegowych systemów nadzorujących ruch stat-
ków. Zasadnicza rola systemu AIS polega przesyłaniu
danych w relacji statek – statek oraz statek – brzeg –
statek.
Przesyłane dane dotyczą m.in.:
- nazwy, bandery, pozycji geograficznej, kursu,
prędkości, portu przeznaczenia jednostek pły-
wających, ich typu, stopnia uprzywilejowania
wynikającego z postanowień międzynarodo-
wych przepisów o zapobieganiu zderzeniom na
morzu, ilości osób na statku oraz statusu prze-
wożonych ładunków;
- informacji istotnych z punktu widzenia bezpie-
czeństwa żeglugi, dotyczących lokalnych
ostrzeżeń nawigacyjnych lub transmisji infor-
macji hydrometeorologicznych i monitorowa-
nia oznakowania nawigacyjnego.
6
Według wymagań V Rozdziału Konwencji SOLAS
opracowanej przez IMO, system AIS powinien być
zainstalowany na:
- wszystkich jednostkach o pojemności brutto
300 ton i więcej, pływających w żegludze mię-
dzynarodowej;
- wszystkich jednostkach o pojemności brutto
500 ton i więcej, niezatrudnionych w żegludze
międzynarodowej;
6
G. Adamczyk – Kotarska, Wprowadzenie systemu AIS
jako efektywnego źródła informacji nawigacyjnej, Materiały
Biura Hydrograficznego Marynarki Wojennej.
- wszystkich statkach pasażerskich, niezależnie
od rozmiaru.
Działanie systemu AIS polega na wysyłaniu in-
formacji o pozycji i prędkości poruszającego się statku
z okrętowego GPS oraz kompasu z częstotliwością
kilku sekund . W przypadku jednostek znajdujących się
na kotwicy lub zacumowanych sygnał jest wysyłany
rzadziej np. co 2-3 minuty.
Zasadniczo informacje nadawane przez AIS moż-
na podzielić na dwie grupy tzn. stałe i zmienne. Pierw-
sze, nadawane co ok. 6 minut zawierają:
- unikalny numer przydzielony dla każdego stat-
ku, tzw. numer MMSI (Maritime Mobile Se-
rvice Identity);
-
- numer IMO, stały numer przydzielany jednost-
ce danej bandery (po zmianie bandery nastę-
puje zmiana numeru IMO);
- sygnał wywoławczy jednostki;
- nazwa statku (do 20 znaków)
- rodzaj przewożonego ładunku;
- wymiaru statku (zaokrąglone do 1 metra);
- zanurzenie jednostki;
- port przeznaczenia oraz oczekiwany czas wej-
ścia
do
portu
w
formacie
mie-
siąc/dzień/godzina/minuta;
- informacje nt. lokalizacji anteny systemu GPS
oraz systemu pozycjonowania jednostki.
Oprócz informacji rutynowych nadawanych ze
stałą częstotliwością, jednostka podaje nieregularnie
informacje dotyczące swojego statusu (czy jest w ru-
chu czy na postoju), wykonywanych zwrotów, zaistnia-
łych awarii, dokładności określenia pozycji, kursu
względem Ziemi, rzeczywistego kursu z żyrokompasu
itp. Zasadnicze dane wykorzystane w badaniu dotyczy-
ły numerów MMSI, nazwy jednostki oraz oczekiwane-
go czasu wejścia do DCT Gdańsk.
Rys 1. Widok na DCT Gdańsk
Logistyka 6/2013
386
Logistyka - nauka
System umożliwia automatyczne monitorowanie
wszystkich statków podlegających postanowieniom
rozdziału V Konwencji SOLAS, wykorzystując w tym
celu stacje brzegowe AIS systemów krajowych po-
szczególnych państw. W Polsce oddano do eksploatacji
stacje obejmujące zasięgiem przede wszystkim obszary
polskich służb VTS na Zatoce Gdańskiej i toru wodne-
go Szczecin-Świnoujście. Są one połączone siecią
komputerową. Serwer krajowy sieci polskiej zainsta-
lowany jest w Urzędzie Morskim w Gdyni. Realizuje
on wymianę informacji z analogicznymi systemami
innych państw.
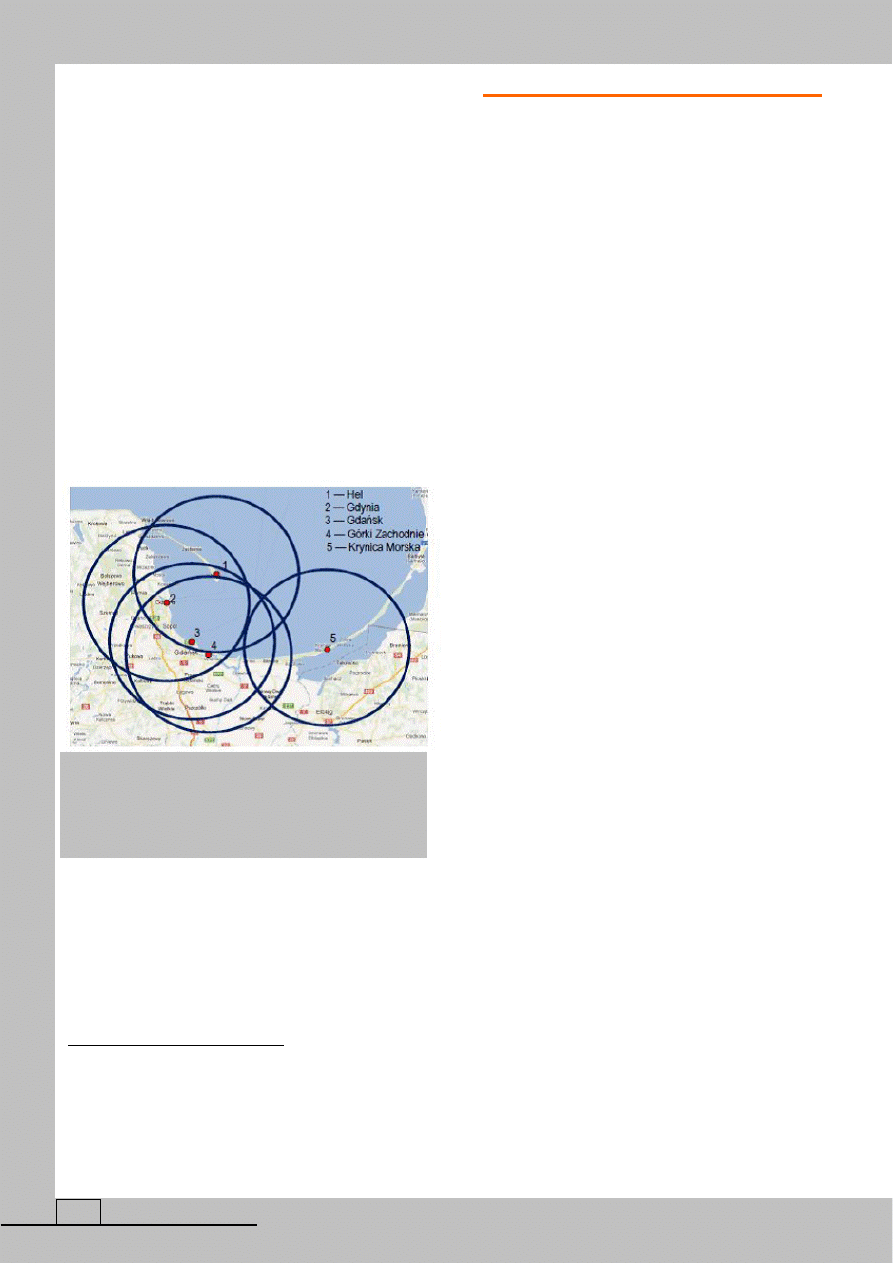
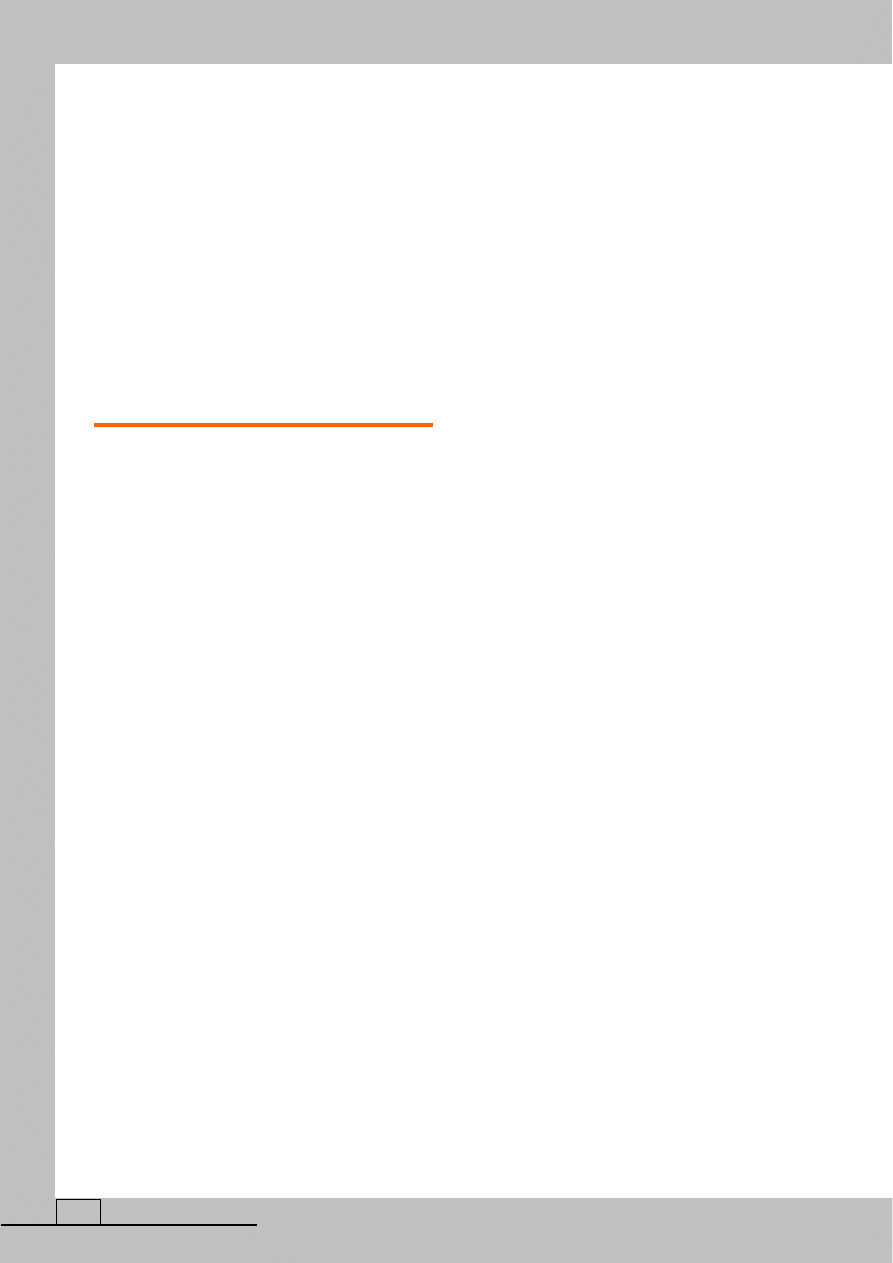
W prowadzonych badaniach wykorzystano dane
z systemu VTS Zatoki Gdańskiej, spływające z 5 rada-
rowych stacji brzegowych (kapitanaty portu Hel,
Gdańsk, Gdynia, Wieża radarowa Górki zachodnie
oraz Latarnia morska Krynica Morska) (rys. 2) odbie-
rających sygnały od przemieszczających się jednostek.
Informacje ze stacji brzegowych przesyłane są do VTS
drogą radiowa lub łączami światłowodowymi.
7
7
S. Świerczyński, K. Czaplewski Pozyskiwanie infor-
macji nawigacyjnej na potrzeby systemów VTS., Zeszy-
ty naukowe AMW, Rok L III, nr 3, Gdynia 2012, s. 114-
115.
Symulacja ruchu jednostek w DCT Gdańsk
Jak wyżej wspomniano, system AIS dostarcza
nie tylko informacji nawigacyjnych niezbędnych
w kontroli ruchu jednostek, ale również dostarcza da-
nych charakteryzujących same jednostki, tj.: wymiary
zewnętrzne (długość, szerokość, zanurzenie), nośność
itp. Korzystając z możliwości ww. systemu, obserwacji
poddano ruch jednostek w terminalu DCT Gdańsk.
Okres obserwacji, jak wspomniano, obejmował 60 dni.
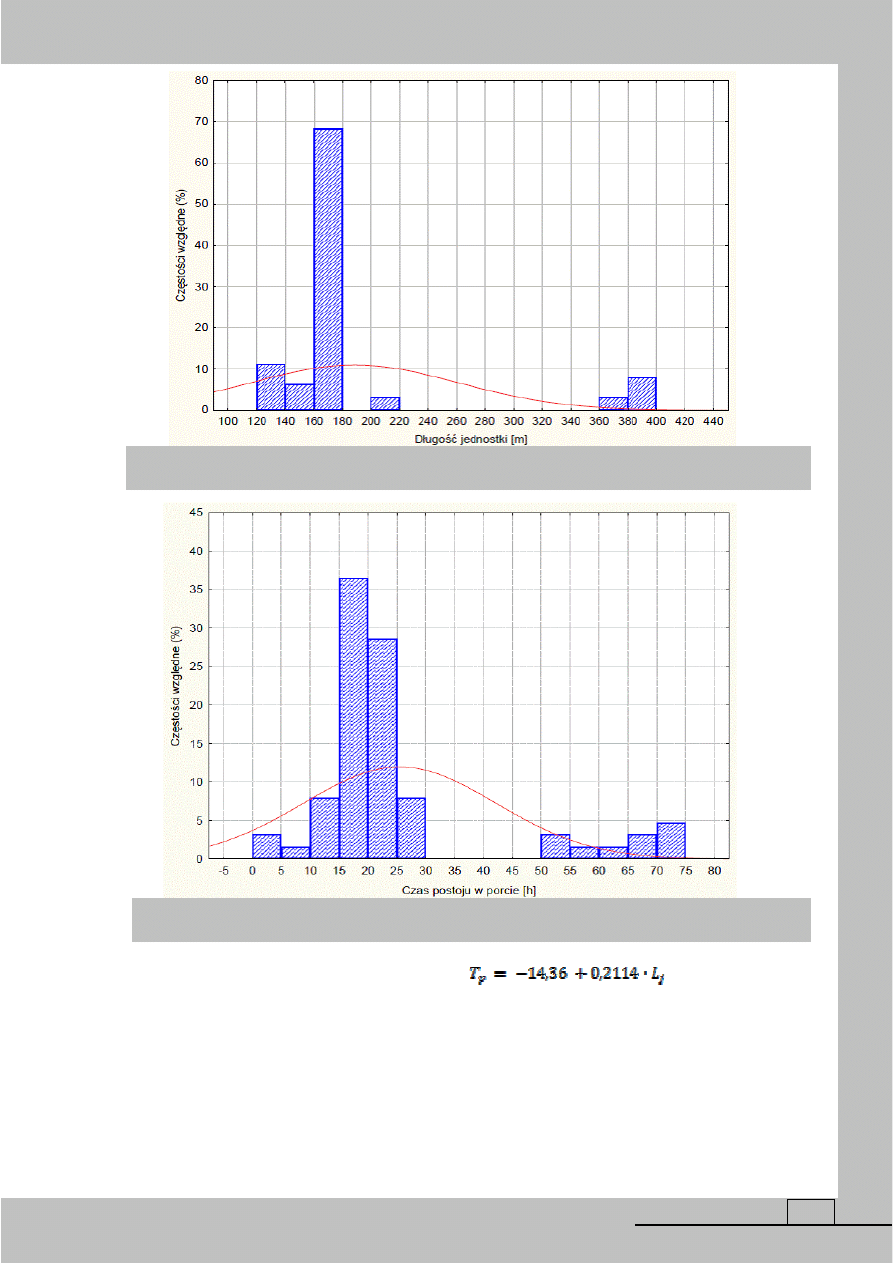
W oparciu o zebrane dane przeprowadzono analizę
szeregów czasowych koncentrując się na dwóch para-
metrach, tj.: częstości i gęstości prawdopodobieństwa.
Analizę zobrazowano w postaci histogramów, między
innymi długości jednostek wchodzących do terminala,
ich czasów przebywania w terminalu, liczby jednostek
wchodzących i wychodzących. Uzyskane w ten sposób
zbiory
danych
opisano
rozkładem
normalnym
(Rys. 3 i 4)., choć lepszymi parametrami dopasowania
(przybliżenia) do rozkładu cech poszczególnych
zmiennych (długość jednostki, czas rozładunku) cha-
rakteryzował się rozkład logarytmicznie normalny.
Na wykorzystanie wspomnianego rozkładu nor-
malnego miały wpływ dwie okoliczności. Po pierwsze,
parametry rozkładu normalnego, tj.: wartość oczeki-
wana, wariancja, jak również dystrybuanta rozkładu
przybierały wartości nieznacznie różniące od wartości
parametrów rozkładu logarytmicznie normalnego. Po-
dobne były również w obu przypadkach wartości testu
zgodności rozkładu chi-kwadrat (χ
2
). Po drugie, w dal-
szej analizie wykorzystywano generator liczb loso-
wych (de facto liczb pseudolosowych) znajdujący się
w zasobach programu Excel, który wykorzystuje trans-
formatę Boxa-Mullera. Transformata ta transformuje
dwie zmienne losowe o rozkładzie jednostajnym (a taki
charakter miały dane uzyskane podczas obserwacji) na
zmienne o rozkładzie normalnym.
Zbieżność rozrzutów w populacji pomiędzy po-
pulacją obserwowaną a populacją liczb losowych skut-
kuje większym trafnością (prawdopodobieństwem)
otrzymanych wyników. Analizując zebrane dane moż-
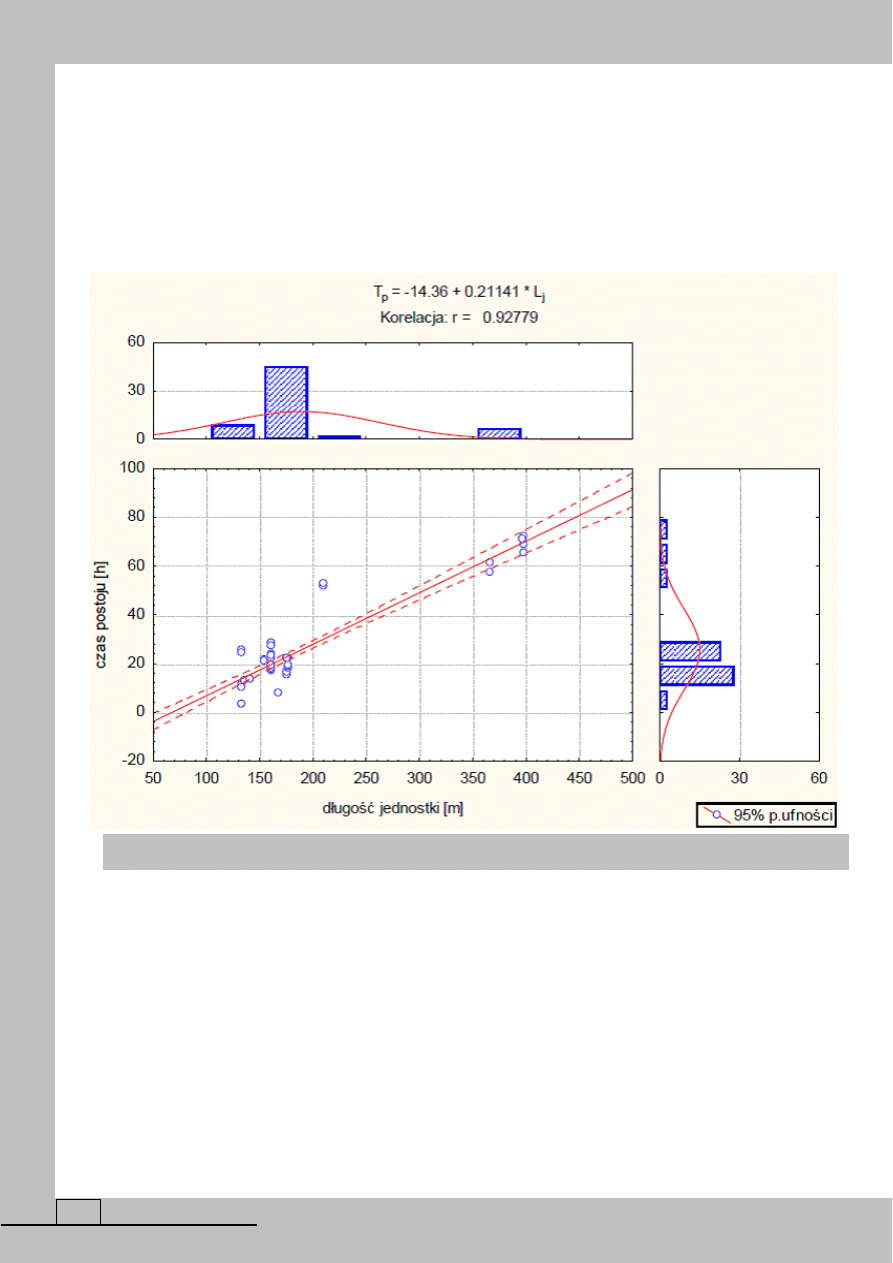
na badać zależności pomiędzy zmiennymi podlegają-
cymi rejestracji. Niech przykładem będzie zależność
pomiędzy długością jednostki pozostającej w porcie
a czasem jej postoju, który na potrzeby pracy można
traktować jako czas rozładunku i załadunku, a szerzej
jako czas obsługi jednostki.
Rys. 2 Lokalizacja i zasięgi stacji brzegowych sys-
temu VTS Zatoka Gdańska.
Źródło: S. Świerczyński, K. Czaplewski Pozyskiwanie
informacji nawigacyjnej na potrzeby systemów VTS.,
Zeszyty naukowe AMW, Rok L III, nr 3, Gdynia 2012
Logistyka - nauka
Logistyka 6/2013
387
Podstawą analizy jest określenie współczynnika
korelacji, którego wartość w tym przypadku wskazuje
na ścisły związek pomiędzy długością jednostki a cza-
sem postoju w porcie i wynosi r = 0,93. Znajdując
równanie korelacji (1), np. opisane funkcją liniową,
można, znając wartość jednej zmiennej, wnioskować
o wartości pozostałej. Graficzną zależność pomiędzy
długością jednostki pozostającej w porcie a czasem jej
postoju przedstawiono za pomocą wykresu rozrzutu
(Rys. 5).
(1)
gdzie:
T
p
– czas postoju jednostki w porcie [h],
L
j
– długość jednostki [m].
Podobną analizę można przeprowadzić, np. po-
między nośnością jednostek (szerzej, np. ilością konte-
nerów) wyrażoną w DWT a czasem rozładunku, czy
też liczbą jednostek wchodzących/wychodzących
z portu a np. odstępami czasowymi pomiędzy tymi
Rys. 3. Histogram długości jednostek wchodzących do portu
Źródło: opracowanie własne.
Rys. 4. Histogram czasów postoju w porcie
Źródło: opracowanie własne.
Logistyka 6/2013
388
Logistyka - nauka
jednostkami. Takie i inne analizy pozwolą na wnio-
skowanie o ,,zapasie początkowym’’, którym w przy-
padku portu jest długość dostępnego wyposażonego
w infrastrukturę wolnego nabrzeża portowego.
Głównym zadaniem, jakie sobie postawili auto-
rzy, było zasymulowanie ruchu jednostek (tj. wejść
i wyjść) w terminalu DCT Gdańsk z wykorzystaniem
metody Monte Carlo. Okres przeprowadzonej symula-
cji obejmował 16 dni roboczych DCT.
.
Symulacja mogła się odbyć w oparciu o dane
zgromadzone podczas wcześniejszej obserwacji ruchu
jednostek generowane przez system AIS.
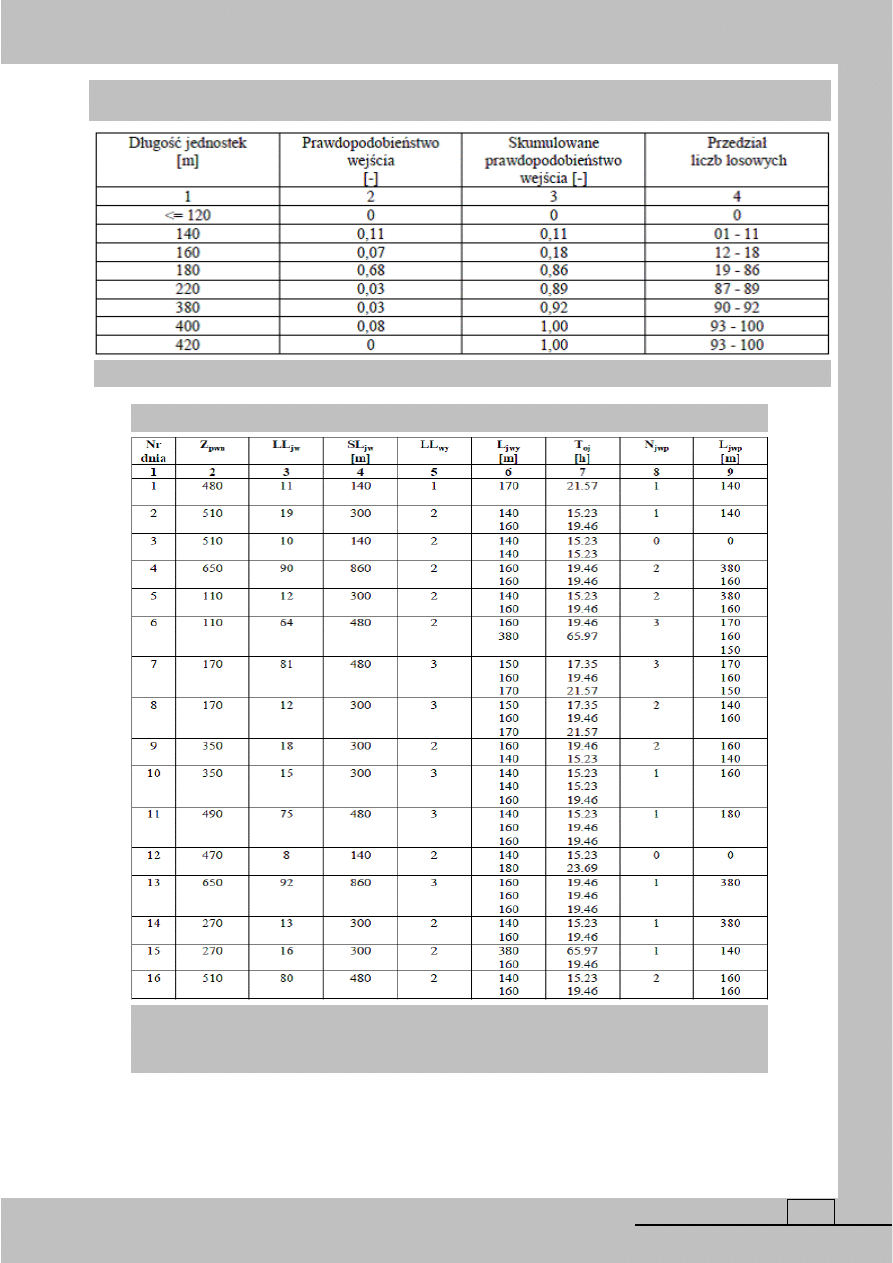
Część tych danych zestawiono w tabeli 1, która
odzwierciedla wyniki obserwacji wejść jednostek
i powiązanego z nimi przedmiotowego prawdopodo-
bieństwa dla poszczególnych długości oraz w wymia-
rze skumulowanym. Na podstawie rozkładu prawdo-
podobieństwa wygenerowano liczby losowe stosownie
do jego wartości. Wynikiem symulacji jest bezwzględ-
ny miernik oceny decyzji, wyrażający się długością
dysponowanego nabrzeża podczas operacyjnej działal-
ności terminala. Wielkością wyjściową w tym zakresie
był zapas dysponowanego nabrzeża wyznaczony po-
przez dominantę długości jednostek wchodzących.
Natomiast dalsze zmiany długości dysponowanego
nabrzeża były wynikiem prowadzonej symulacji.
Symulowana długość jednostek wchodzących
(tabela 2, kolumna 3) była określona poprzez wygene-
rowany zbiór liczb losowych (tabela 1, kolumna 4).
Rys. 5. Zależność pomiędzy długością jednostki a czasem postoju w porcie
Źródło: opracowanie własne
Logistyka - nauka
Logistyka 6/2013
389
Kolejną zmienną wejściową był zbiór liczb lo-
sowych odnoszący się do liczby wyjść, który determi-
nował długość zwalnianego nabrzeża (zapas dyspono-
wany wolnego nabrzeża) w korelacji z czasem obsługi
(1).
Na podstawie rozkładu długości jednostek
wchodzących oraz obliczonych czasów obsługi okre-
ślono długość i czasy obsługi jednostek aktualnie znaj-
dujących się w porcie (tabela 2, kolumna 8,9). Propo-
nowane rozwiązanie problemu badawczego posiada
Tabela 1 . Długość jednostek oraz skumulowane prawdopodobieństwa i odpowiadające im przedziały liczb
losowych
Źródło: opracowanie własne
Źródło: opracowanie własne
Legenda: Z
pwn
- zapas początkowy wolnego nabrzeża; LL
jw
- liczba losowa długości jednostek wchodzących; SL
jw
- symulowana
długość jednostek wchodzących; LL
wy
- liczba losowa wyjść; l
jwy
- Długości jednostek wychodzących; T
oj
- czasy obsługi jedno-
stek; N
jwp
- liczba jednostek przebywających w porcie; L
jwp
- długości jednostek przebywających w porcie
Tabela 2. Symulacja metodą Monte Carlo ruchu statków w terminalu kontenerowym
Logistyka 6/2013
390
Logistyka - nauka
pewne ograniczenia, które wynikają z możliwości
przyjęcia jednostek przez poszczególne nabrzeża ter-
minalu. Przedmiotowe ograniczenie będzie decydować
o wielkości miernika bezwzględnego, na podstawie
których zaproponowano miernik względny definiowa-
ny jako wskaźnik zajętości nabrzeża.
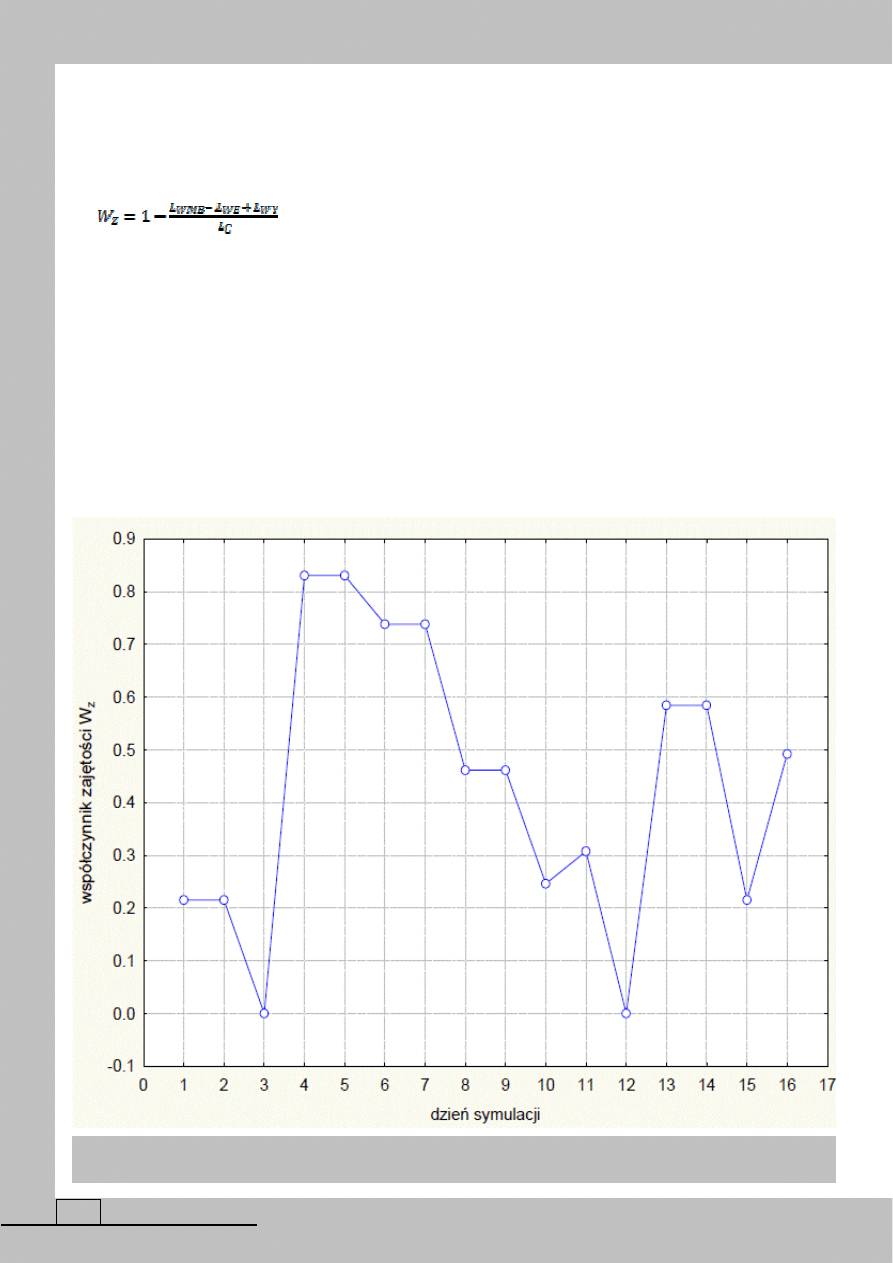
(2)
gdzie:
W
Z
– wskaźnik zajętości;
L
WMB
– długość wolnych metrów bieżących nabrzeża
[m];
L
WE
– sumaryczna długość jednostek wchodzących
[m];
L
WY
- sumaryczna długość jednostek wychodzących
[m];
L
C
– całkowita długość dysponowana nabrzeża [m].
Obserwacja zmian wartości wskaźnika zajętości
W
Z
pozwoli między innymi na ocenę stabilności symu-
lowanego procesu. Zmiany wartości wskaźnika
W
Z
w okresie objętym symulacją (16 dni) przedstawio-
no na rys. 6.
Z analizy wykresu na rys. 6 wynika, że wartości
współczynnika zmieniają się w bardzo szerokim zakre-
sie (od wartości maksymalnej do minimalnej), co może
świadczyć o braku stabilności procesu. Z drugiej jed-
nak strony, należy zauważyć pewną prawidłowość,
a mianowicie, po osiągnięciu wartości bliskiej maksy-
malnej wartość współczynnika stopniowo zmniejsza
się do wartości minimalnej, po czym proces ten zaczy-
na się powtarzać. Dla pełnego obrazu zmian współ-
czynnika zajętości należałoby przeprowadzić badania
w szerszym zakresie niż zaproponowany w pracy.
Rys. 6. Zmiany współczynnika zajętości W
Z
w okresie symulacji
Źródło: opracowanie własne
Logistyka - nauka
Logistyka 6/2013
391
Wnioski
Prezentowane w niniejszej pracy rozwiązanie
problemu badawczego jest, jak się wydaje perspekty-
wiczne, zważywszy że stanowi pierwszą próbę podej-
ścia autorów do tematu. Zaproponowana metoda po-
siada duże możliwości jej implementacji do zagadnie-
nia, szczególnie przy jego uszczegółowianiu. Należy
zwrócić uwagę na fakt, że użyto najprostszego genera-
tora liczb losowych. Ponadto w obu przypadkach okre-
ślania zbiorów liczb losowych (dla długości jednostek
wchodzących i liczby jednostek opuszczających port)
próby były względem siebie niezależne, co pozo -
staje w pewnym dysonansie ze stanem faktycznym,
gdyż istnieje związek funkcyjny pomiędzy tymi
zmiennymi. Problem ten rozwiązano poprzez anali-
tyczne dopasowane długości poszczególnych jednostek
wchodzących do ich skumulowanej długości oraz do-
pasowanie długości poszczególnych jednostek wycho-
dzących do czasu ich obsługi w roboczogodzinach.
W trakcie pracy nasunęły się następujące wnioski natu-
ry szczegółowej:
1. Dane gromadzone przez system AIS mogą być
z powodzeniem wykorzystane do prognozo-
wania działalności operacyjnej portu / termina-
la kontenerowego.
2. Przyjęty do badania okres bazowy 60 dni
umożliwia zdefiniowanie danych wejściowych
do symulacji na podstawie metod statystycz-
nych (obserwacja była prowadzona na bieżąco
oraz archiwizowana przez autorów opracowa-
nia w oparciu o odczytywane dane z systemu
dostępne
na
stronie
internetowej
www.marinetraffic.com, oraz bieżące zesta-
wienia Urzędu Morskiego Gdynia).
3. Rezultaty symulacji wskazują iż DCT zacho-
wuje pełną płynność operacyjną pod względem
wejść i wyjść jednostek względem czasu ich
obsługi co w zasadzie potwierdzają dane rze-
czywiste z obserwacji.
4. Badanie stabilności wskaźnika zajętości wyka-
zało pewną monotoniczność jego zmian, co
może być zjawiskiem typowym dla terminala
kontenerowego. Pełna interpretacja tego proce-
su wymaga dłuższego okresu symulacji.
5. Wspomniany wskaźnik zajętości informuje nas
o efektywności wykorzystania nabrzeża, moż-
na na jego podstawie prognozować wzrosty i
spadki natężenia działalności operacyjnej ter-
minala, a także definiować potrzeby w zakresie
rozbudowy koniecznego dysponowanego na-
brzeża.
6. Badany problem odnosił się do symulacji ope-
racji w relacji statek – długość nabrzeża, nie-
mniej jednak proponowana metoda umożliwia
rozwiązywanie innych zagadnień logistycz-
nych, jak np. prognozowanie wielkości wcho-
dzącego i wychodzącego wolumenu w relacji
z zewnętrznymi partnerami terminala.
7. Proponowane rozwiązanie jest pewną koncep-
cją, która będzie doskonalona przez autorów
w trakcie dalszych prac.
Streszczenie
Ruch jednostek pływających niezależnie od ich
przeznaczenia w portach morskich jest procesem cha-
rakteryzującym się dużą dynamiką. Liczba wejść
i wyjść w jednostce czasu determinuje ilość jednostek
przebywających oraz obsługiwanych w danym porcie
oraz może stanowić rekomendację co do dalszych in-
westycji infrastrukturalnych, których celem jest zwięk-
szenie potencjału operacyjnego w zakresie postoju
i obsługi. Pożytecznym narzędziem wspierającym pro-
ces podejmowania decyzji w tym obszarze może być
symulacja, która poprzez zbudowanie odpowiedniego
modelu kontroli ruchu ułatwia poszukiwanie optymal-
nych rozwiązań w sytuacjach złożonych, gdzie roz-
wiązanie analityczne może być bardzo skomplikowane
lub nawet niemożliwe. Niniejszy artkuł stanowi próbę
zbudowania takiego modelu, który poprzez symulację
wejść i wyjść jednostek w przyjętym czasie, określa
możliwości operacyjne portu co do liczby przyjmowa-
nych i obsługiwanych statków, pozwala ocenić stabil-
ność symulowanego procesu ruchu jednostek pływają-
cych w porcie morskim, a także formułuje pewne
mierniki oceny decyzji, mogące stanowić rekomenda-
cje w zakresie podejmowanych działań inwestycyj-
nych, mających na celu wzrost potencjału operacyjne-
go danej instalacji logistycznej.
Abstract
The ship movement at the sea ports independ-
ently of their type and capabilities is a very dynamic
process. The number of call on and exit to the sea in
the timely manner determines the number of vessels
staying and handled by sea port installations. It also
can give the clear recommendation what kind of in-
vestments are required to improve the sea port opera-
tional capabilities in the future. The simulation method
Logistyka 6/2013
392
Logistyka - nauka
can be a very useful tool within the decision making
process. It allows to create the model of the movement
control which enable to find the optimised solutions in
the complicated situation when the analytic method
cannot be applicable. The article presents the model
idea which using the simulation method of the ship
movement at the sea port in the time perspective de-
termines its operational capabilities referring to the
number of the ships received and handled at the sea
port. The model is also the tool to estimate the stability
of the sea movement process at the port and formulate
the some factors that could dictate same investments to
extend its operational capabilities.
Literatura
1. Grzelakowski A.S., Matczak M., Współczesne
porty morskie, funkcjonowanie i rozwój, Aka-
demia Morska w Gdyni, Gdynia 2012.
2. Najder J. , Rozwój Polskich portów morskich,
Uniwersytet Gdański, Gdańsk 2013.
3. Najder J., Polskie Porty Morskie, Uniwersytet
Gdański, Gdańsk 2008.
4. Ficoń K. Logistyka morska, statki, porty, spedy-
cja, BELL, Warszawa 2010.
5. Zdzisław Sarjusz – Wolski, Strategia zarzadza-
nia zaopatrzeniem, Placet, Warszawa 1998.
6. Kopczewska K., Kopczewski T. Wójcik P., Me-
tody ilościowe w R, aplikacje ekonomiczne i fi-
nansowe, CeDeWu.pl Wydawnictwa Fachowe,
Warszawa 2009.
7. Świerczyński S., Czaplewski K. Pozyskiwanie
informacji nawigacyjnej na potrzeby systemów
VTS, Zeszyty naukowe AMW, Rok L III, nr 3,
Gdynia 2012.
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron