
MECHANIKA
UKŁADÓW WIELOCZŁONOWYCH
Prowadzący: dr inż. Paweł Ostapkowicz
WM-324

Wykład 4
Temat:
Dynamika mechanizmów
1. Wstęp
Analiza dynamiczna mechanizmów obejmuje:
•
badanie wpływu sił zewnętrznych, ciężaru, sił tarcia oraz sił bezwładności na człony
ruchome, pary kinematyczne i podstawę;
•
badanie ruchu mechanizmu pod działaniem zadanych sił i ustalenie parametrów,
zapewniających zadane przebiegi mechanizmu.
Najczęściej w obliczeniach stosuje się ogólne równania równowagi ciał sztywnych,
np. zasadę d'Alem-berta.
Zgodnie z zasadą d'Alem-berta wpływ ruchu na obciążenie członów i reakcje w parach
kinematycznych może być uwzględniony przez dołączenie do sił zewnętrznych, sił
bezwładności.
Zasada d'Alem-berta: Układ sił zewnętrznych i reakcji zewnętrznych działających na
układ mechaniczny z dodaniem sił bezwładności tego układu stanowi układ równoważny
zeru.
Zapis
matematyczny:
Poszczególne siły bezwładności
wyrażają się równaniem:

Kinetostatyka - metoda polegająca na rozpatrywaniu równowagi wszystkich sił wraz z siłą
bezwładności (równania wynikające z zasady d'Alemberta przypominają równania
statyki).
Podział sił zewnętrznych działających na mechanizm można w ogólności dokonać na:
−
siły czynne (napędzające) - siły, których praca w danym okresie jest dodatnia,
−
siły bierne (oporu) - siły, których praca w mechanizmie jest ujemna, tzn. siły te
działają przeciwnie do przesunięcia.
Podczas trwania określonego ruchu mechanizmu ta sama siła może być w części okresu
siłą czynną, a w innej części okresu siłą bierną.
Siły oporu można podzielić na tzw.:
−
opory użyteczne - nazywane oporami technologicznymi, np. opór skrawania
w obrabiarkach,
−
opory szkodliwe - które powinny być ograniczane w jak największym stopniu,
np. opory tarcia w przegubach.
Główne siły czynne pochodzą
zwykle od silników
napędzających lub innego rodzaju
napędów.
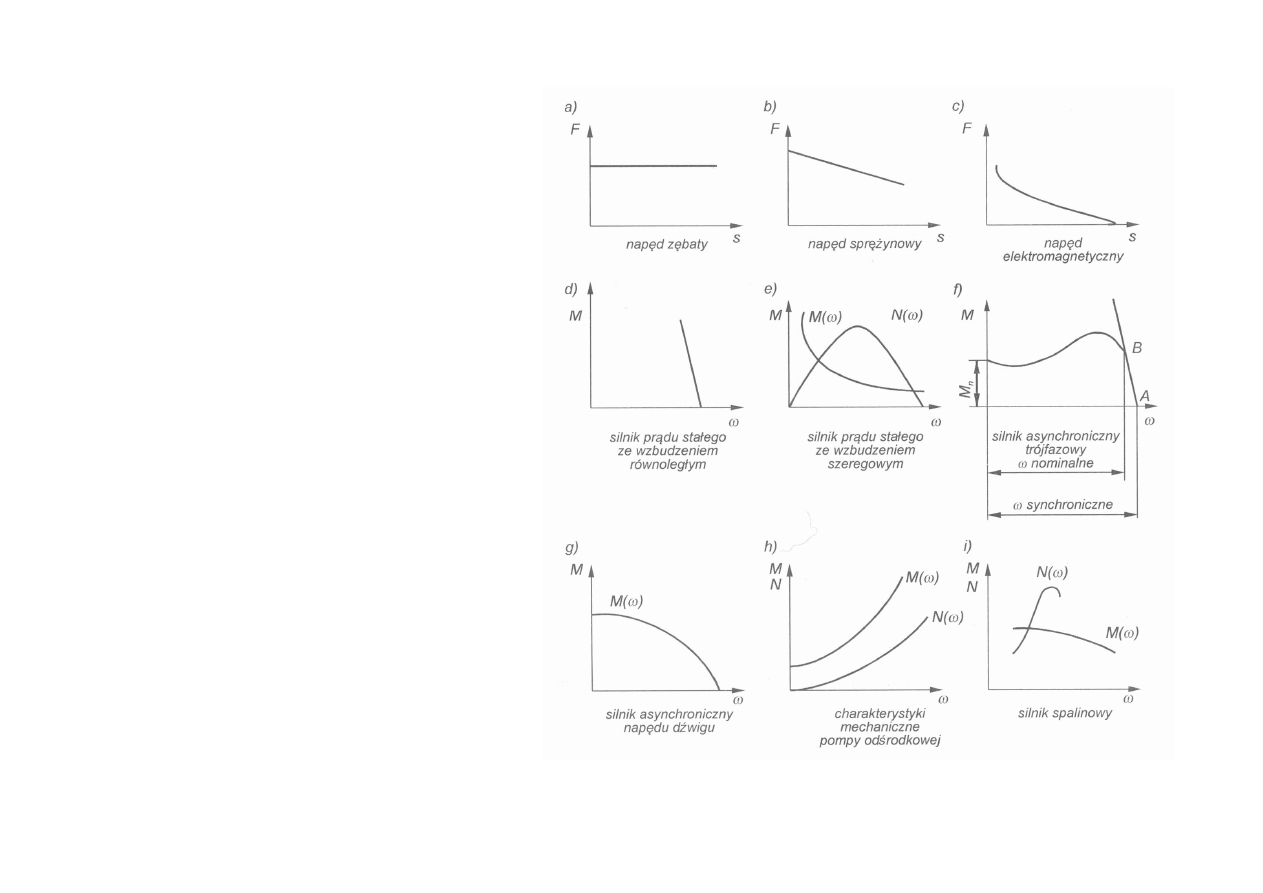
Przebieg zmienności tych sił
określa się przez podanie
charakterystyki mechanicznej
maszyny.
Charakterystyką mechaniczną
maszyny nazywa się zależność
momentu (lub mocy)
przyłożonego do wału
wyjściowego silnika
(lub wału wejściowego maszyny)
od prędkości obrotowej
(lub kątowej) tego wału.
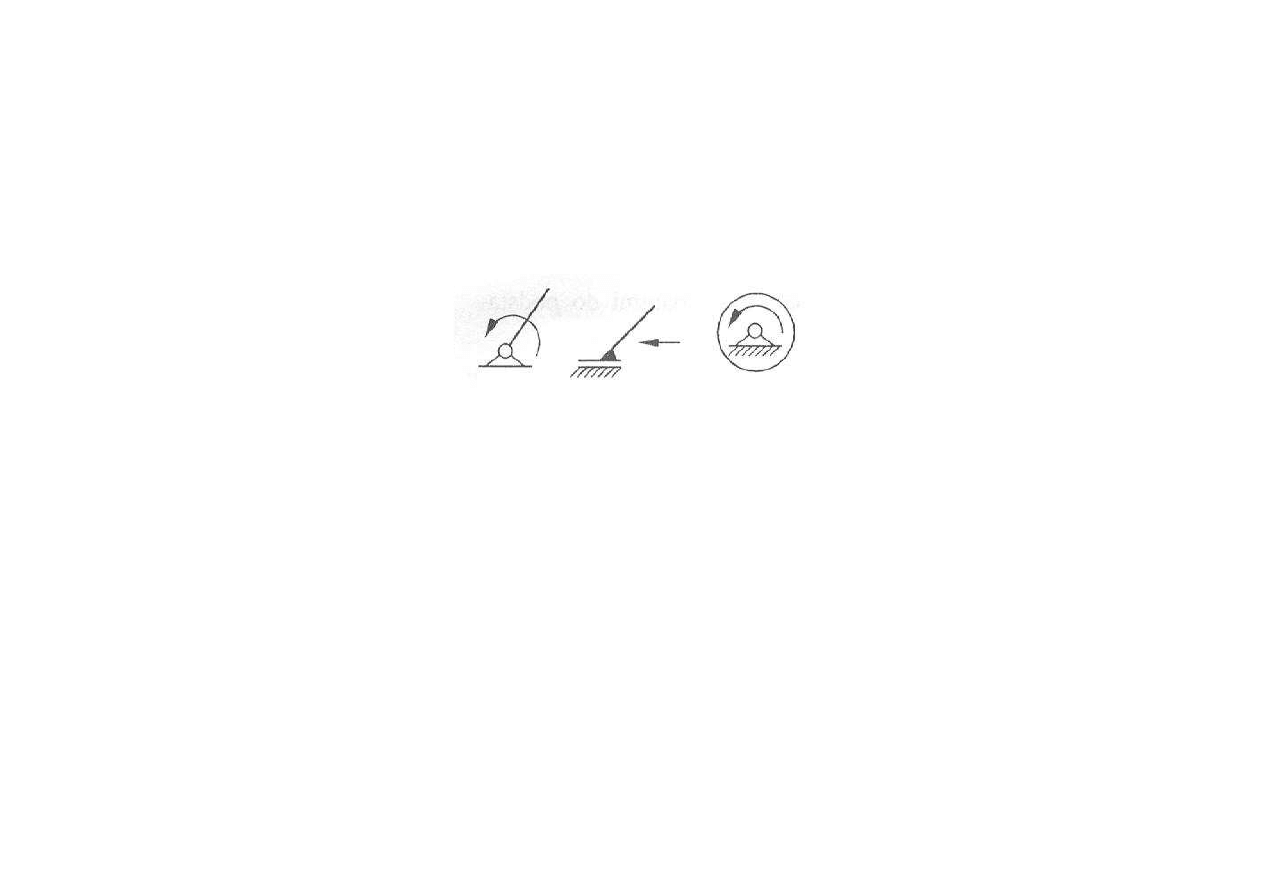
Rys. Przykłady charakterystyk wybranych napędów i maszyn
2. Masy zastępcze
W wielu wypadkach, gdy znane są przyspieszenia pewnych punktów członu, wygodniej
jest w celu wyznaczenia sił bezwładności nie redukować układu sił do środka mas, ale
skupić masę członu w punktach, których przyspieszenia są znane.
Taką metodę postępowania nazywa się metodą skupionych mas zastępczych. Aby można
było człon o masie rozłożonej zastąpić kilkoma masami skupionymi w określonych
punktach, muszą być spełnione następujące warunki:
1)
suma mas zastępczych musi być równa masie członu:
2)
ś
rodek masy układu mas skupionych powinien pokrywać się ze środkiem masy członu
mechanizmu.
- warunek ten dla układu płaskiego wyraża się równaniami:
- w przypadku układu przestrzennego dochodzi jeszcze równanie:
3)
moment bezwładności układu mas zastępczych względem osi przechodzącej przez
ś
rodek mas powinien być równy momentowi bezwładności członu względem tej samej
osi.
- w przypadku układu płaskiego wyraża się to równaniem:
- w przypadku układu przestrzennego:
Jeśli chce się zastąpić masę członu płaskiego n masami skupionymi, należy określić
3n parametrów (każda masa określona jest trzema parametrami: wielkość i dwie
współrzędne).
Ponieważ w układzie płaskim należy spełnić 4 równania, można dowolnie założyć
p parametrów, których ilość można policzyć korzystając z zależności: .
3. Statyczna wyznaczalność mechanizmu
Każdy mechanizm to pewna struktura, dzięki której człony wykonują odpowiedni ruch.
Struktura mechanizmu musi uwzględniać ograniczenia ruchu, które nazywa się więzami.
Reakcjami więzów w mechanizmach nazywa się siły oddziaływania jednego członu na
drugi.
Jak wyznaczyć te reakcje, jaki musi być spełniony warunek?
Warunkiem statycznej wyznaczalności mechanizmu płaskiego jest spełnienie równań
rzutów i momentów, znanych w mechanice:
gdzie punkt 0 jest dowolnie wybranym stałym biegunem.
Zatem liczba równań statyki, które można ułożyć dla mechanizmu o n członach wyniesie
3n. Tyle niewiadomych reakcji można wyznaczyć z równań mechaniki.
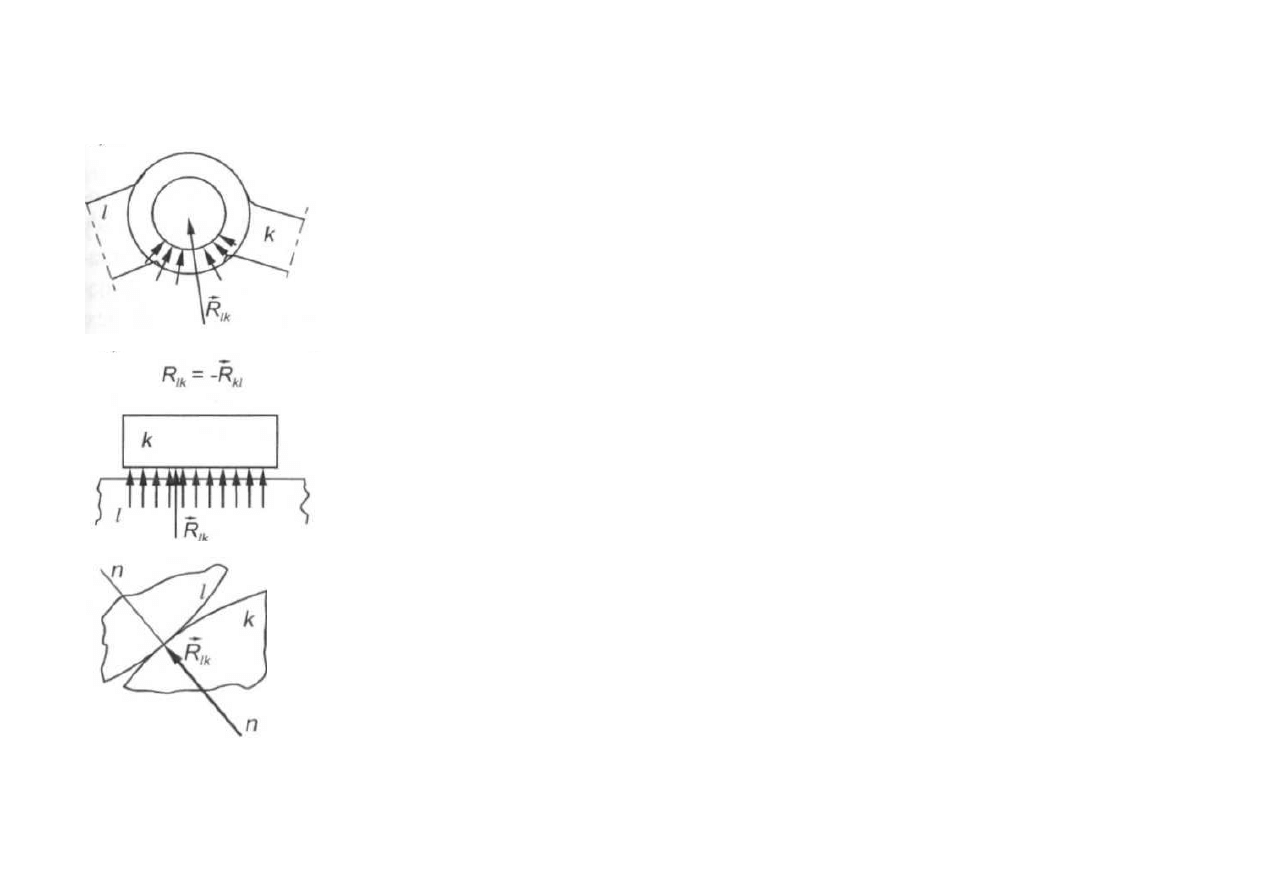
Ile reakcji można mieć w mechanizmie płaskim, w który wchodzą pary V i IV klasy?
W parze obrotowej V klasy jest jedna wiadoma, tj. znany jest
punkt przyłożenia reakcji, ponieważ musi ona przechodzić
przez oś przegubu. Niewiadome są dwie, tj.: wartość reakcji i
jej kierunek. Wartość i kierunek reakcji zależą od sił
działających na człony k i l.
W parze postępowej V klasy jest także jedna wiadoma,
tj. kierunek reakcji, ponieważ wiadomo, że musi być ona
prostopadła do kierunku ruchu (zakładany jest brak tarcia).
Niewiadomymi są wartość i punkt przyłożenia reakcji,
zależne od obciążenia członów.
W parze wyższej IV klasy 4.6c) są dwie wiadome (dlatego
para ta nazywa się wyższą), tj. kierunek reakcji, (równoległy
do prostej n-n przechodzącej przez środki krzywizn) i punkt
jej przyłożenia (w punkcie styku). Niewiadomą jest wartość
reakcji.
W każdej parze V klasy są dwie niewiadome, a w parze IV klasy tylko jedna.

Jeśli mechanizm składa się z p
5
par piątej klasy i p
4
par czwartej klasy to sumaryczna ilość
niewiadomych wynosi 2p
5
+ p
4
. Aby mechanizm był statycznie wyznaczalny, to ilość
niewiadomych musi być równa ilości równań statyki. Otrzymuje się więc warunek:
3n = 2p
5
+ p
4
.
Widać, że warunek statycznej wyznaczalności mechanizmu jest identyczny z warunkiem
istnienia grupy.
Identyczny warunek jest dla mechanizmów przestrzennych, w których jest 6 równań
statyki dla każdego członu. Warunek ten jest następujący:
6n = 5p
5
+ 4p
4
+ 3p
3
+2p
2
+p
1
.
Z równań tych wynika, że grupy są łańcuchami kinetostatycznie wyznaczalnymi.
Aby więc wyznaczyć reakcje w mechanizmie, należy najpierw podzielić go na grupy,
a następnie rozważać równowagę grupy.
4. Plan sił członu napędzającego
Człon napędzający tworzy najczęściej z podstawą parę postępową lub obrotową, do której
może być przyłożony moment sił. Człon napędowy ma 1 stopień swobody względem
podstawy.
Dla członu napędzającego nie jest spełniony warunek statycznej wyznaczalności
mechanizmu.
Jeśli do członu napędzającego byłyby przyłożone tylko siły bezwładności tego członu
i reakcje w węzłach od pozostałych członów mechanizmu i podstawy, człon napędowy nie
byłby w równowadze.
Aby go zrównoważyć, należy przyłożyć siłę zewnętrzną (lub moment) pochodzącą od
napędu. Siła ta (lub moment) jest konieczna do utrzymania mechanizmu w założonym
ruchu. Siłę tę pochodzącą od napędu a konieczną do zachowania równowagi członu
napędzającego nazywa się siłą równoważącą. Jeśli do członu napędowego przyłożony jest
moment pochodzący od napędu, a konieczny do zachowania równowagi nazywa się go
momentem równoważącym.
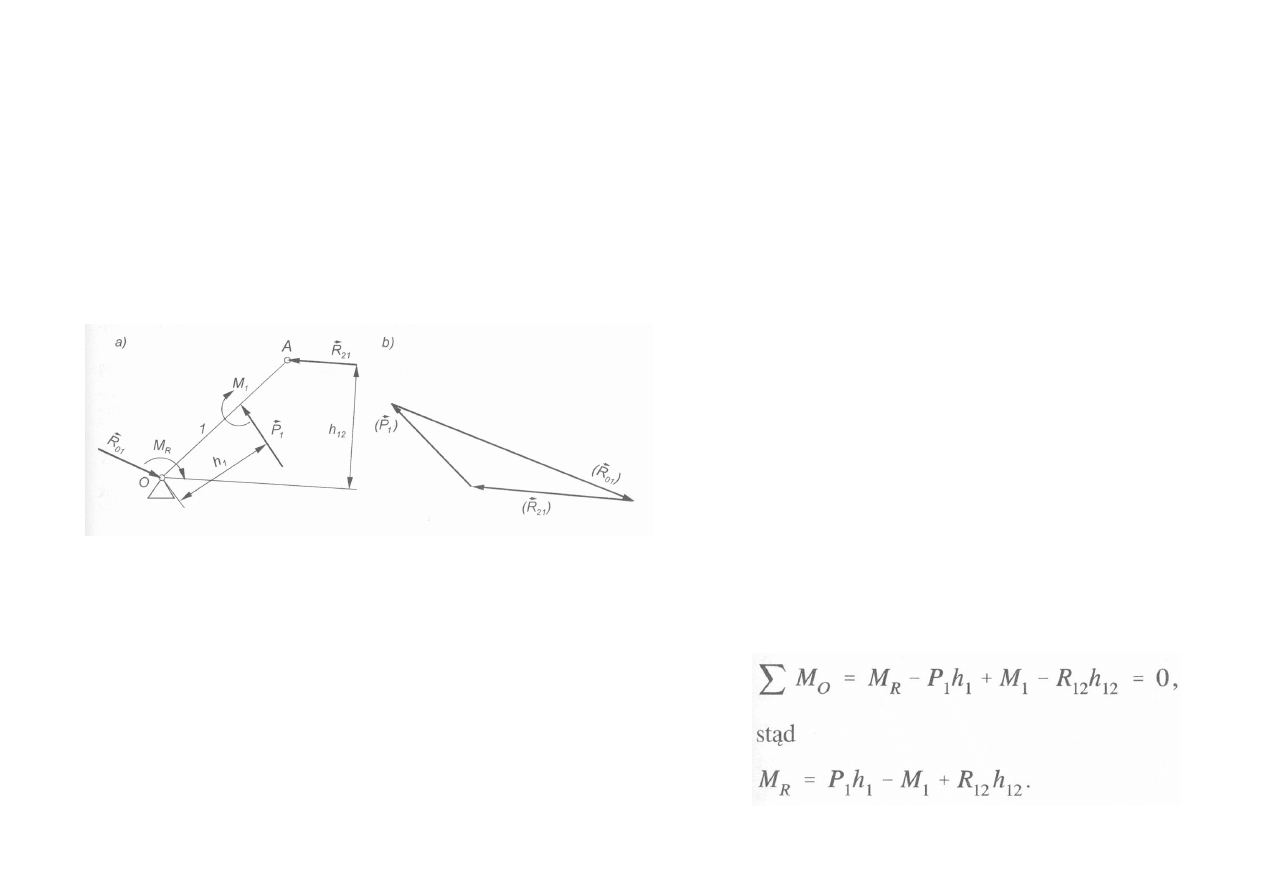
Człon napędzający wykonuje np. ruch obrotowy.
o
dane: reakcja pochodząca od pozostałych części mechanizmu R
21
oraz obciążenie
zewnętrzne członu napędowego P
1
i M
1
;
o
znaleźć: moment równoważący M
R
i reakcję podstawy R
0l
;
o
założenie: P
1
jest wypadkową sił bezwładności, sił ciężkości i sił zewnętrznych
przyłożonych do członu.
Reakcja w punkcie O zależy od sposobu
przyłożenia do członu siły P
R
lub
momentu M
R
. Jeśli człon napędowy
połączony jest z wałem silnika za pomocą
sprzęgła, to przyłożony jest do niego
moment M
R
. Przy innym sposobie
przyłączenia członu do silnika jest do
niego przyłożona siła równoważąca P
R
.
Gdy się założy, że do członu przyłożony jest moment M
R
, to rozwiązanie otrzyma się
w sposób następujący:
−
reakcję
podstawy
R
01
wyznaczy
się
z wieloboku sił (na człon działają trzy siły),
−
moment równoważący wyznaczy się z
równowagi momentów względem punktu O

5. Analityczno-wykreślne wyznaczanie sił w mechanizmach płaskich bez tarcia
Jeśli na rozpatrywany łańcuch kinematyczny działa układ sił składający się z kilku
znanych sił oraz dwóch sił nie znanych co do wartości, ale o znanych kierunkach, to
można zbudować wielobok sił ze znanych sił i wykreślić dwa zamykające boki wieloboku
z sił nie znanych, rozwiązując zadanie wykreślnie.
Jeśli sił nie znanych jest więcej niż dwie, to wieloboku nie da się zamknąć. W tym
przypadku stosuje się metodę analityczno-wykreślną. Najpierw układa się równania
równowagi obliczając analitycznie niektóre z niewiadomych, a dopiero po zmniejszeniu
liczby niewiadomych do dwóch można wykreślić plan sił. Jako równanie równowagi
należy obrać równanie momentów. Sprawdzenie tych równań jest konieczne, gdyż
zamykanie się wieloboku sił nie zapewnia zerowania się momentu głównego układu sił.
Układając równania momentów należy starać się tak dobrać punkty, względem których
obliczane są momenty, aby w każde równanie wchodziła tylko jedna niewiadoma,
np. reakcja poprzeczna do członu.

Kolejność postępowania przy określaniu reakcji jest następująca:
•
podanie wszystkich sił wraz z siłami bezwładności, działających na człony
mechanizmu;
•
podzielenie mechanizmu na grupy i człon napędzający, wraz z oddzielną analizą
równowagi każdej grupy.
Analizę rozpoczyna się od grupy najbardziej oddalonej od członu napędzającego, kolejno
dochodząc na końcu do analizy członu napędzającego.
Rozpatrywanie równowagi typowych grup
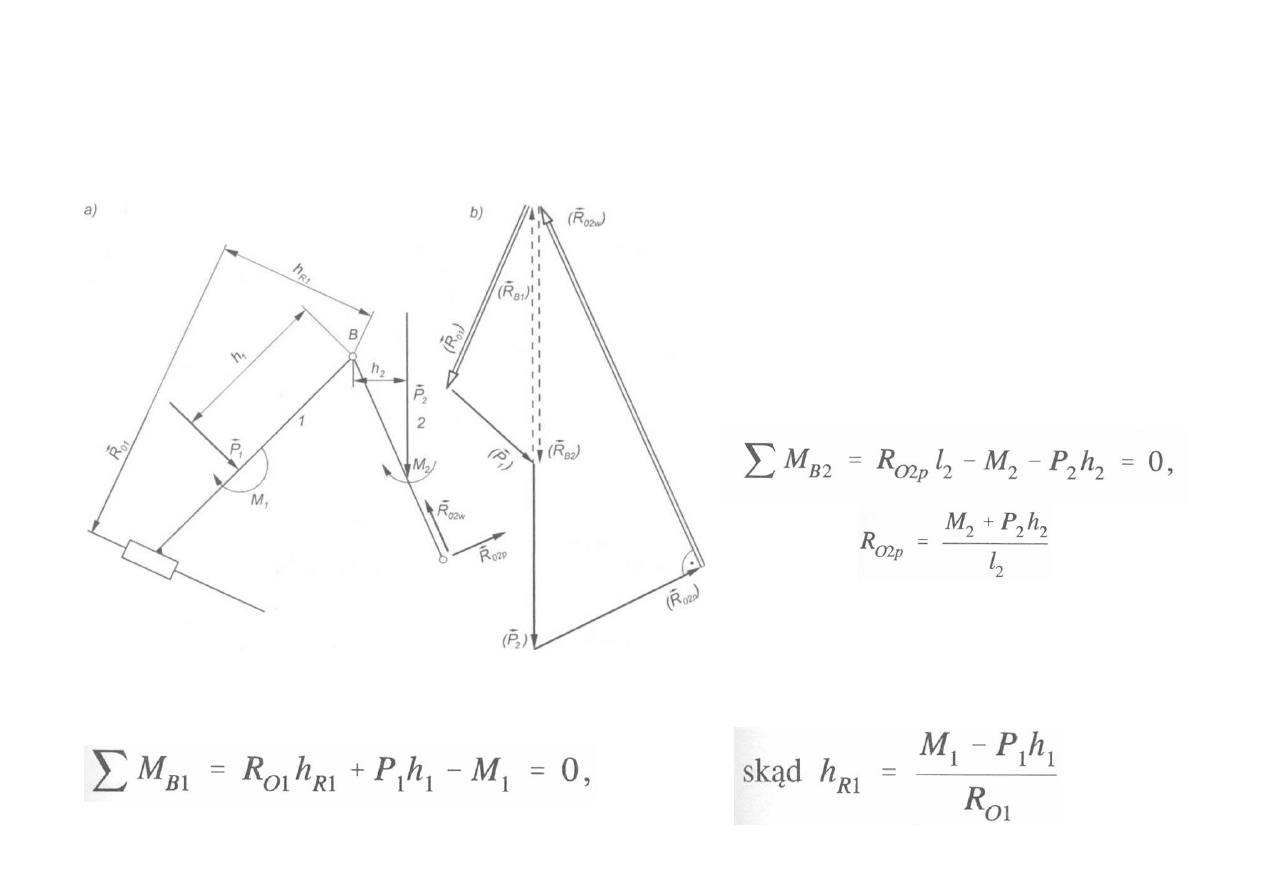
a) grupa klasy drugiej z parą postępową
Reakcja
pary
postępowej
jest
prostopadła do osi prowadnicy, przy
czym oprócz jej wartości nie znany
jest także punkt jej przyłożenia.
Reakcje poprzeczne wyznacza się
z równania momentów:
stąd:
Po wyznaczeniu tej reakcji można
wykreślić wielobok sił. Z wieloboku
znajduje się R
01
i R
02w
oraz reakcje w punkcie B. Aby wyznaczyć położenie reakcji R
01
,
układa się równanie momentów sił działających na człon 1 względem punktu B:
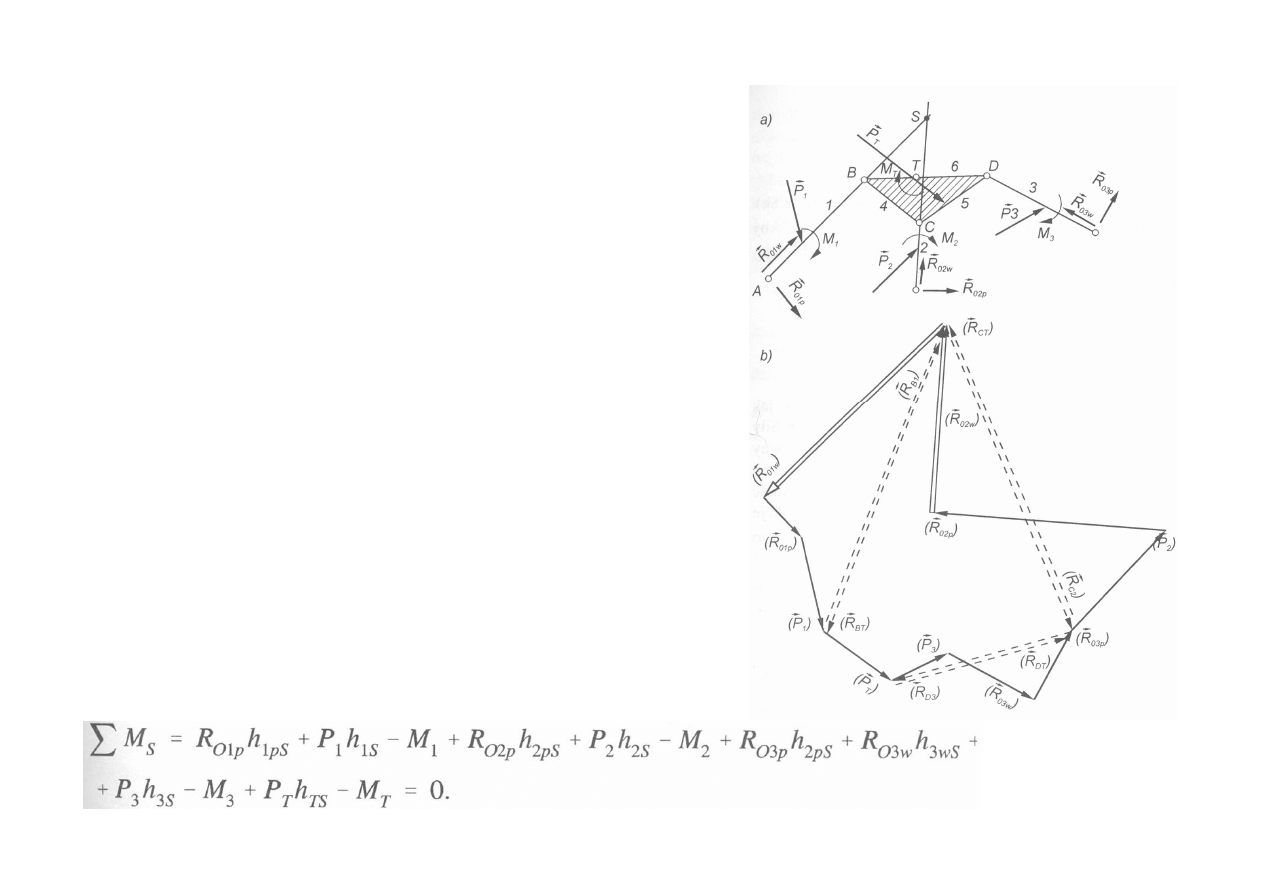
b) grupa klasy trzeciej z parami obrotowymi
Do członów przyłożono siły zewnętrzne i siły
bezwładności
(reprezentują
te
siły:
siły
P
i
i momenty M
i
). Człony 4, 5, 6 tworzą sztywny
trójkąt, który traktuje się jak jeden człon. Siłę
działającą na ten człon oznaczono P
T
, a moment M
T
.
Do planu sił całej grupy wchodzi sześć nieznanych
reakcji. Cztery z nich trzeba wyznaczyć analitycznie.
Trzy reakcje R
01p
, R
02p
, R
03p
można wyznaczyć
z równań momentów kolejno członu 1 względem
punktu B, członu 2 względem punktu C i członu 3
względem punktu D. Czwarta może być np. reakcja
R
03w
. W celu jej wyznaczenia należy ułożyć równanie
momentów sił działających na całą grupę względem
punktu S, w którym przecinają się kierunki członów
1 i 2:
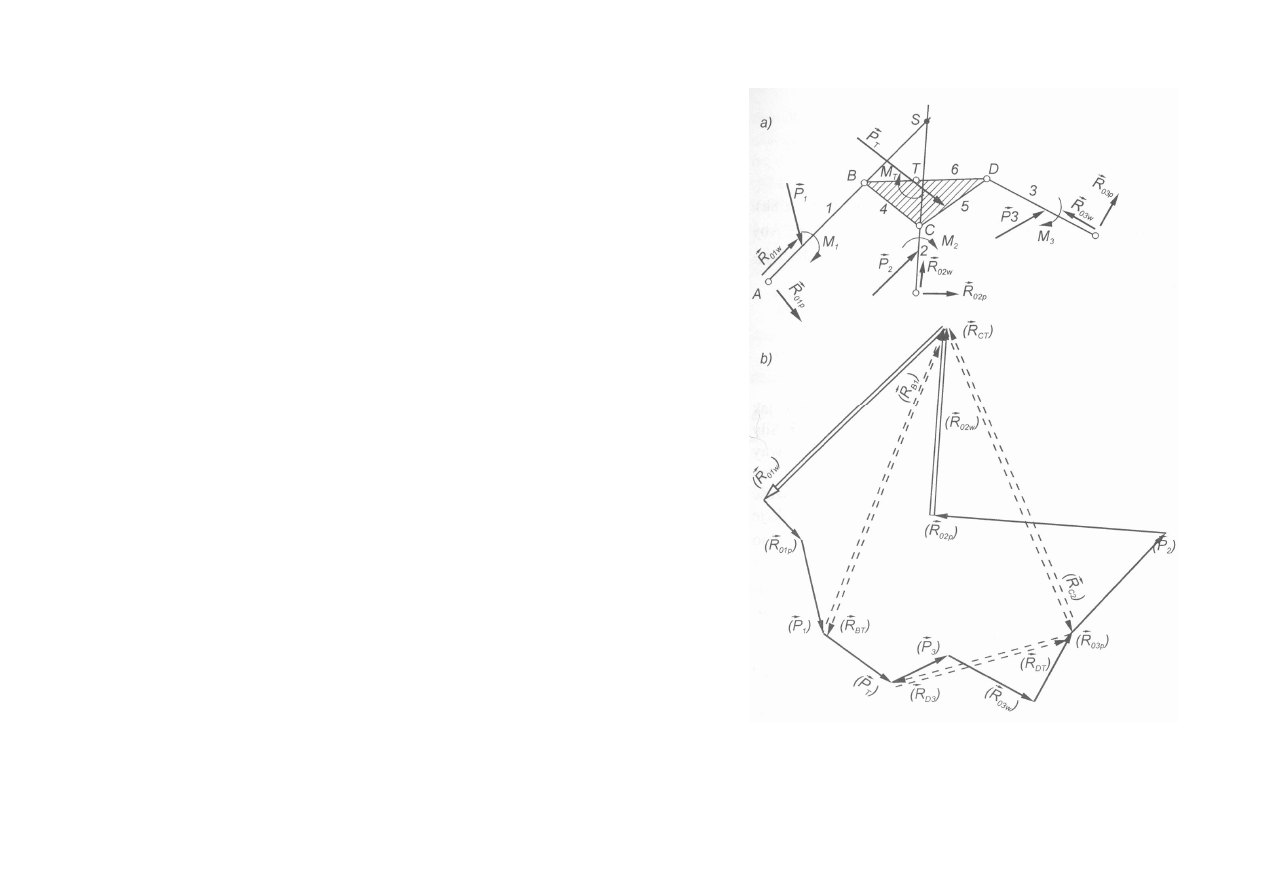
Ramiona sił (nie przedstawione na rysunku) są
odmierzane prostopadle do odpowiednich sił.
Po wyznaczeniu R
03w
można narysować wielobok sił
dla całej grupy. Z wieloboku można wyznaczyć siły
R
B
, R
C
i R
D
będące reakcjami punktów B, C i D na
odpowiednie człony. Reakcje te łącznie z siłą P
T
tworzą zamknięty wielobok przedstawiający siły
działające na trójkąt T. Aby uzyskać ten wielobok,
trzeba układając plan sił kreślić je kolejno w obranym
kierunku. Na rysunku przyjęto kierunek w prawo,
przechodząc od sił członu 1 (R
0lp
, P
1
) do sił członu
T (P
T
), dalej do członu 3 (P
3
, R
03w
, R
03p
) i do członu
2 (P
2
, R
02p
). Pozostałe do zamknięcia wieloboku
niewiadome także spełniają tę kolejność (R
02w
, R
01w
).

6. Wyrównoważanie mechanizmów płaskich
W trakcie złożonego ruchu mechanizmów płaskich (np. dźwigniowych) na ich ogniwa
działają zmienne siły i momenty sił bezwładności.
Wyrównoważenie statyczne ogranicza się do unieruchomienia środka ciężkości
mechanizmu jako całości, co uzyskuje się poprzez odpowiednią korekcję mas ruchomych
ogniw mechanizmu. W efekcie eliminuje się jedynie siły, lecz nie momenty sił
bezwładności.
Poprzez zwiększenie mas ogniw ruchomych zwiększa ich masowe momenty bezwładności
i w rezultacie zwiększa się przenoszenie dynamicznego momentu na fundament.
Całkowite dynamiczne wyrównoważenie mechanizmu jest możliwe poprzez zmianę
struktury mechanizmu np. zastosowanie zamiast struktury rzędowej układu cylindrów
silników tłokowych układu przeciwbieżnego typu „bokser”. Nie zawsze jednak zmiana
struktury jest możliwa (np. silniki jednocylindrowe).
Wyszukiwarka
Podobne podstrony:
więcej podobnych podstron