Projekt 3
Modelowanie dynamiki mobilnej maszyny roboczej
Ładowarka kołowa – wersja 16.12.2015
0. Wstęp
W ramach projektu przeprowadzone zostaną symulacje mające na celu określenie nastaw układu
stabilizującego drgania ładowarki najkorzystniejszych z punktu widzenia wysokiego komfortu pracy
operatora oraz małego ubytku urobku łyżki. Na podstawie symulacji, w ograniczonym zakresie, prze-
dyskutowany zostanie wpływ struktury układu podwoziowego na komfort pracy operatora, ubytek
urobku z łyżki w trakcie jazdy po nierównościach oraz stateczność wywrotną maszyny.
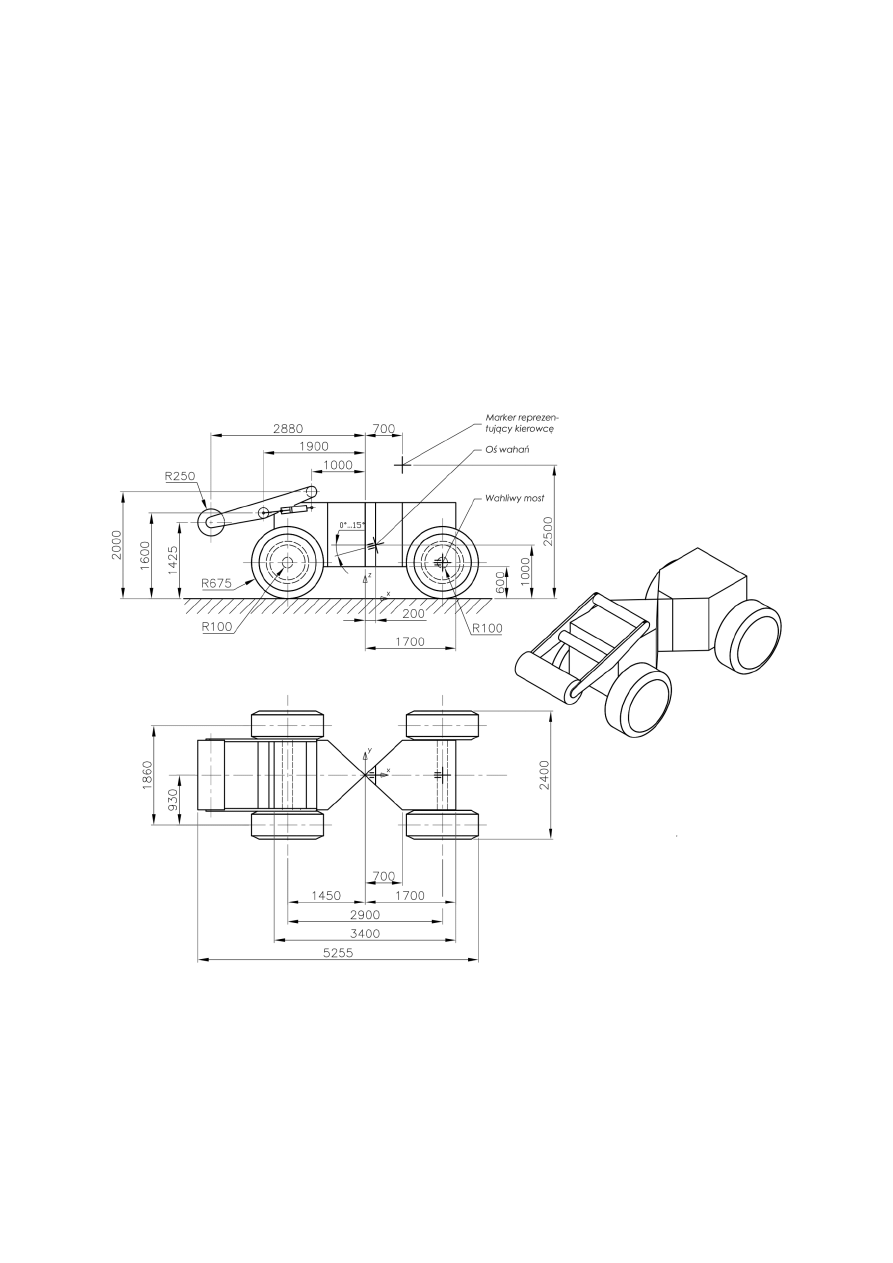
Rys. 1. Schemat uproszczonego modelu symulacyjnego ładowarki łyżkowej wraz z wymiarami
Poniżej kilka najistotniejszych informacji dot. modelu udostępnionego do zajęć:
Modelowana jest ładowarka zgodna ze schematem rys. 1.
Układ jednostek modelu: kg, m, s, N, Pa, stopień.
Model wymaga doposażenia w koła, co zostanie omówione na w trakcie zajęć, a także szcze-
gółowo opisane w instrukcji.
Po doposażeniu modelu w koła, należy zamodelować pojazd z napędem na 4 koła,
Kamienie milowe projektu:
Modelowanie sprężyn odwzorowujących siłowniki podnoszenia wysięgnika z układem stabili-
zacji drgań ładunku,
Modelowanie kół oponowych, napędów itd.,
Określenie nastaw układu stabilizacji drgań ładunku minimalizujących wysyp urobku z łyżki
podczas jazdy po nierównościach oraz najkorzystniejszych z punktu widzenia komfortu pracy
operatora.
Określenie struktury układu podwoziowego najkorzystniejszej z punktu widzenia minimaliza-
cji wysypu urobku z łyżki i maksymalizacji komfortu pracy operatora
Określenie układu podwoziowego najkorzystniejszego z punktu widzenia stateczności wy-
wrotnej pojazdu
1. Modelowanie
Model bryłowy z połączonymi członami proszę uzupełnić o koła i sprężyny modelujące siłowniki pod-
noszenia wysięgnika wraz z układem stabilizacji drgań ładunku.
1.1.
Siłowniki wysięgnika i układ stabilizacji drgań
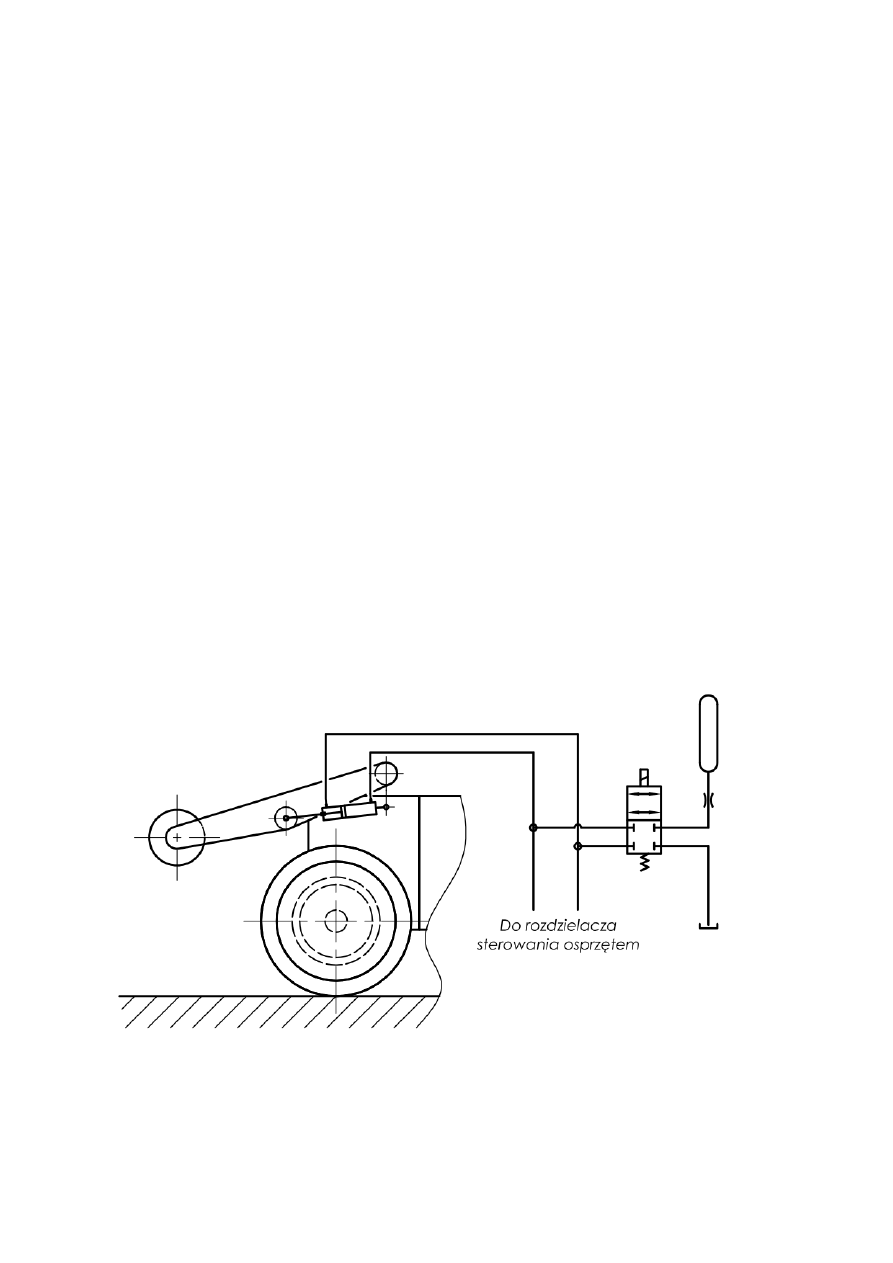
Układ stabilizujący drgania ładunku w układach hydraulicznych ładowarek realizować można przez
połączenie jednej z komór siłownika podnoszenia wysięgnika z akumulatorem przez dławik, jak poka-
zano na rys. 2. Akumulator pełni rolę elementu sprężystego, zaś dławik – tłumika.
Rys. 2. Schemat ideowy hydraulicznego, pasywnego stabilizatora drgań wzdłużnych ładowarki
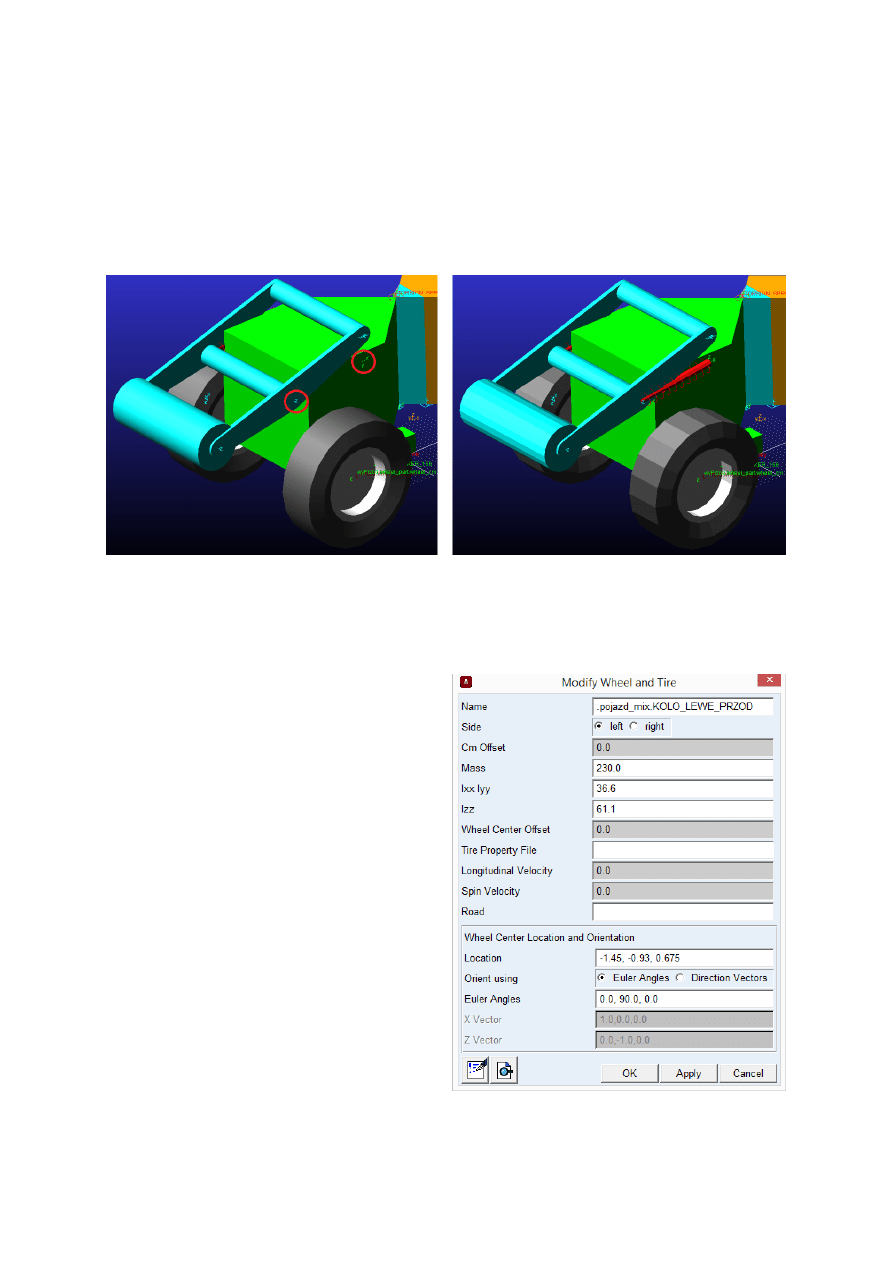
W zadaniu projektowym siłowniki wraz z układem stabilizacji drgań modelujemy sprężynami z tłu-
mieniem (podobnie jak w przypadku projektu nr 2 modelowane były liny dźwignicy). Sprężyny wsta-
wiamy pomiędzy istniejącymi markerami, zgodnie z rys. 3, po obu stronach ładowarki.
UWAGA: Na tym etapie prac wygodnym jest utworzenie zmiennych projektowych (Design variables)
umożliwiających szybką modyfikację sztywności i tłumienia obydwu sprężyn w trakcie poszukiwania
optymalnych nastaw stabilizatora drgań pojazdu.
Rys. 3. Markery, pomiędzy którymi należy rozpiąć sprężyny modelujące siłowniki wysięgnika ładowar-
ki wraz z układem stabilizacji drgań nadwozia
1.2.
Koła
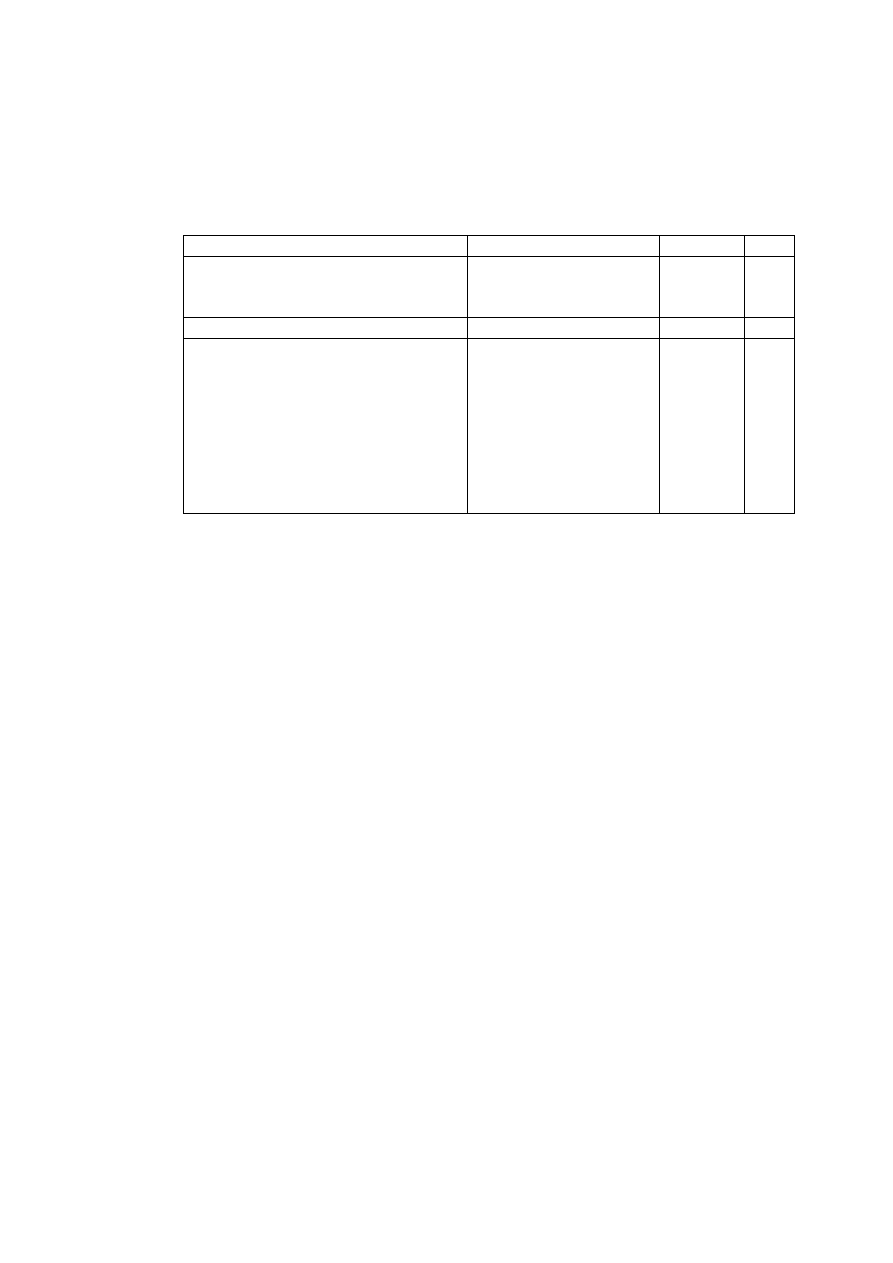
Koła wraz z oponami do modelu wprowadza się
następująco:
Na wstążce w zakładce Forces, z palety
Special forces wybieramy ikonkę opony,
W oknie podajemy:
o
N
AZWĘ
,
jaką będziemy identyfiko-
wać koło w trakcie dalszej pracy,
o I
NFORMACJĘ
,
CZY KOŁO JEST LEWE CZY
PRAWE
UWAGA: Jest to bardzo ważne, jeśli
koła prawe i lewe mają jechać po
nawierzchni o innym zarysie.
o
M
ASĘ
:
230 kg,
o
M
OMENTY BEZWŁADNOŚCI
Ixx i Iyy
(wokół osi leżących w płaszczyźnie
koła): 36.6 kg m
2
,
o
M
OMENT BEZWŁADNOŚCI
Izz
(w osi
obrotu koła): 61.1 kg m
2
,
o Ś
CIEŻKĘ DO PLIKU Z PARAMETRAMI OPONY
,
Wybieramy dołączony plik mdi_fiala01.tir. Zawiera on parametry opony potrzebne do
obliczeń ugięcia opon oraz składowych siły działającej w styku koła z nawierzchnią zgod-
nie z modelem Fiali. Parametry modelu, które należy zmodyfikować w pliku (z użyciem
notatnika), zestawiono w tabeli 1.
Tabela 1. Parametry modelu Fiali wprowadzane do programu ADAMS
Wymiary geometryczne
[DIMENSION]
Promień swobodny koła
UNLOADED_RADIUS
mm
675
Szerokość opony
WIDTH
mm
400
Wysokość profilu opony / szerokość opony
ASPECT_RATIO
-
0.7
Parametry mechaniczne
[PARAMETERS]
Sztywność promieniowa
VERTICAL_STIFFNESS
N/mm
550
Tłumienie promieniowe
VERTICAL_DAMPING
N/(mm/s)
5.69
Współczynnik oporu toczenia
ROLLING_RESISTANCE
mm
0.0
Sztywność wzdłużna opony
CSLIP
N
4000
Sztywność poprzeczna opony odniesiona do
kąta znoszenia
CALPHA
N/rad
350
Wsp. przyczepności przy poślizgu 100%
UMIN
-
0.9
Max. wsp. przyczepności, przy poślizgu
ok. 15 … 25 %
UMAX
-
1.0
*Definicje i jednostki parametrów za: Blundell M. and Harty D.; The multibody Systems
Approach to Vehicle Dynamics; Elsevier Butterworth-Heinemann 2004, s. 306.
UWAGA: Powyższy plik oraz pliki z innymi modelami opon można znaleźć w lokalizacji:
C/(…)/MSC.Software/Adams_x64/2013/acar/shared_car_database.cdb/tires.
o Ś
CIEŻKĘ PLIKU ZAWIERAJĄCEGO WSPÓŁRZĘDNE PROFILU NAWIERZCHNI
Do pierwszych testów wybieramy plik mdi_2d_flat.rdf (płaska droga). W dalszej fazie
pracy plik mdi_2d_flat.rdf należy podmienić na plik z nierównościami. Profil nawierzchni
definiują współrzędne podane w sekcji XZ_DATA (patrz załączony plik mdi_2d_poly.rdf).
W każdym wierszu podane są kolejno:
współrzędna x drogi, czyli odległość punktu drogi od punktu startu,
wysokość nierówności w punkcie drogi pod kołem lewym,
wysokość nierówności pod kołem prawym,
UWAGA: Do stworzenia własnego pliku z nierównościami, jako punkt wyjścia, proszę
wykorzystać plik mdi_2d_poly.rdf. W trakcie modyfikacji pliku mdi_2d_poly.rdf proszę
zachować ścisły porządek, aby droga została skutecznie wczytana do ADAMS-a:
liczba miejsc dziesiętnych poszczególnych współrzędnych w każdej linijce
musi być identyczna,
miejsca dziesiętne w kolejnych kolumnach muszą leżeć dokładnie pod sobą,
każdą linię zaczyna co najmniej 1 znak spacji,
każdą linię kończy cyfra, bezpośrednio po niej pojawia się znak nowej linii,
niedopuszczalna jest spacja na końcu linii,
na końcu pliku nie dopuszcza się nadmiernej liczby białych znaków (maks. 1
znak nowej linii – 2, 3, …, 10 „enterów” na końcu pliku powoduje kłopoty z
wczytaniem drogi)
UWAGA 2: Inne pliki z profilami drogi dostępne są w lokalizacji C/(…)/MSC.Software/
Adams_x64/2013/acar/shared_car_database.cdb/roads.
o
P
OŁOŻENIE ŚRODKA KOŁA
w okienku Location klikamy prawym przyciskiem myszy,
wybieramy opcję Pick location,
wskazujemy środek podstawy walca modelującego most,
modyfikujemy współrzędną y do wartości +/- 0.93 m (w zależności od koła),
pozostałe współrzędne pozostawiamy bez zmian.
o
O
RIENTACJĘ KĄTOWĄ KOŁA
–
w naszym przypadku: 0, 90, 0.
Po wprowadzeniu do modelu kół należy je połączyć obrotowo z mostami, po czym w parach obroto-
wych zainstalować napędy umożliwiające ruch maszyny z prędkością ok. 3.5 m/s.
PODPOWIEDŹ: Do wymuszenia ruchu maszyny z zadaną prędkością wykorzystać można funkcję:
IF(time - 1: 0, 0, IF(time - 4: (time - 1)*6/3, 6, 6))
2. Jazda po nierównościach
Celem niniejszej części projektu jest znalezienie takich parametrów układu stabilizującego drgania
łyżki ładowarki – sprężystości i tłumienia sprężyny modelującej siłowniki podnoszenia wysięgnika –
przy których:
komfort pracy operatora jest największy – warunek ten zachodzi, gdy zależność (1) osiąga
minimum:
𝑎
𝑧𝑎𝑠
= √𝑎
𝑅𝑀𝑆𝑧
2
+ 1,4𝑎
𝑅𝑀𝑆𝑧
2
+ 1,4𝑎
𝑅𝑀𝑆𝑧
2
(1)
UWAGA: Wartości przyspieszeń odczytujemy na markerze modelującym pozycję kierowcy.
utrata urobku z łyżki ładowarki jest najmniejsza – warunek ten zachodzi, gdy wartość sku-
teczna przyspieszenia w kierunku prostopadłym do nawierzchni jest minimalna (2)
𝑎
𝑧
̂ = 𝑎
𝑅𝑀𝑆𝑧
(2)
UWAGA: Wartość przyspieszenia odczytujemy na jednym z markerów należących do walca
modelującego łyżkę ładowarki.
Jako obszar poszukiwań optymalnych nastaw stabilizatora drgań proponuje się przyjąć:
dla współczynnika sprężystości: 1.0E+006 … 4.0E+006 N/m (z krokiem 0.75E+006,
vide tabela 2),
dla współczynnika tłumienia: 0.25E+004 … 2.5E+004 Ns/m (z krokiem 0.75E+004,
vide tabela 2),
Tabela 2. Przykładowy sposób organizacji wyników symulacji, aaa …. ttt – odczytane w trak-
cie symuacji wartości przyspieszeń działających na ładunek i kierowcę ładowarki
tłumienie
2.50E+04
aaa
bbb
ccc
ddd
eee
1.75E+04
fff
ggg
hhh
iii
jjj
1.00E+04
kkk
lll
mmm
nnn
ooo
2.50E+03
ppp
qqq
rrr
sss
ttt
1.00E+06 1.75E+06 2.50E+06 3.25E+06 4.00E+06 sztywnosc
Łącznie dla jednej konfiguracji podwozia należy przeprowadzić 20 symulacji. Sposób usprawnienia
pracy zostanie przedstawiony w trakcie zajęć. Próby proszę wykonać dla co najmniej dwóch wskaza-
nych, z czterech dających się zrealizować przy pomocy modelu, konfiguracji układu podwoziowego,
tj.:
podwozia sztywnego,
podwozia z wahliwym mostem,
podwozia z poziomą osią wahań,
podwozia z osią wahań nachyloną pod kątem 15 stopni.
Warunki symulacji:
Prędkość jazdy: ok. 3.5 m/s (ok. 10 km/h)
Profil nawierzchni drogi: dowolny zarys nierówności, określony indywidualnie przez każdą
grupę, w tabeli 3 zestawiono proponowane przykłady
Tabela 3. Propozycje par wymuszeń działających w trakcie symulacji na lewe i prawe koła pojazdu
Koła lewe
Koła prawe
K
sz
ta
łt
fu
n
kc
ji
o
p
is
u
ją
ce
j z
ar
ys
d
ro
gi
Sinus – jedna harmoniczna,
faza początkowa 0
O
Płaska nawierzchnia
Sinus – dowolna liczba harmonicznych,
faza początkowa 0
O
Płaska nawierzchnia
Sinus – dowolna liczba harmonicznych,
faza początkowa 0
O
Sinus – dowolna liczba harmonicznych,
faza początkowa 180
O
Szum biały
Szum biały
NA ZALICZENIE (do raportu):
Proszę przedstawić, w formie wzoru funkcji lub jej wykresu, przyjęty w symulacjach zarys pro-
filu nawierzchni drogi.
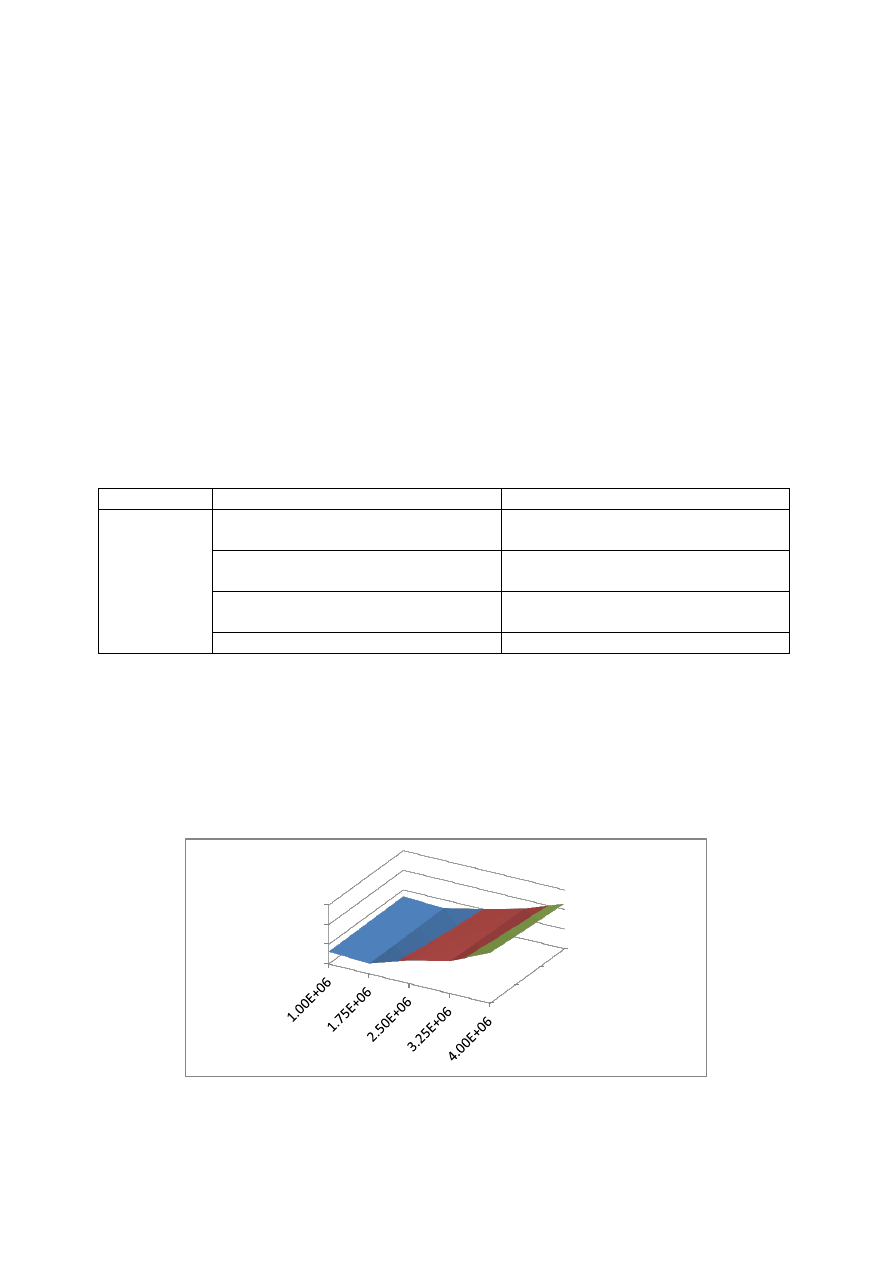
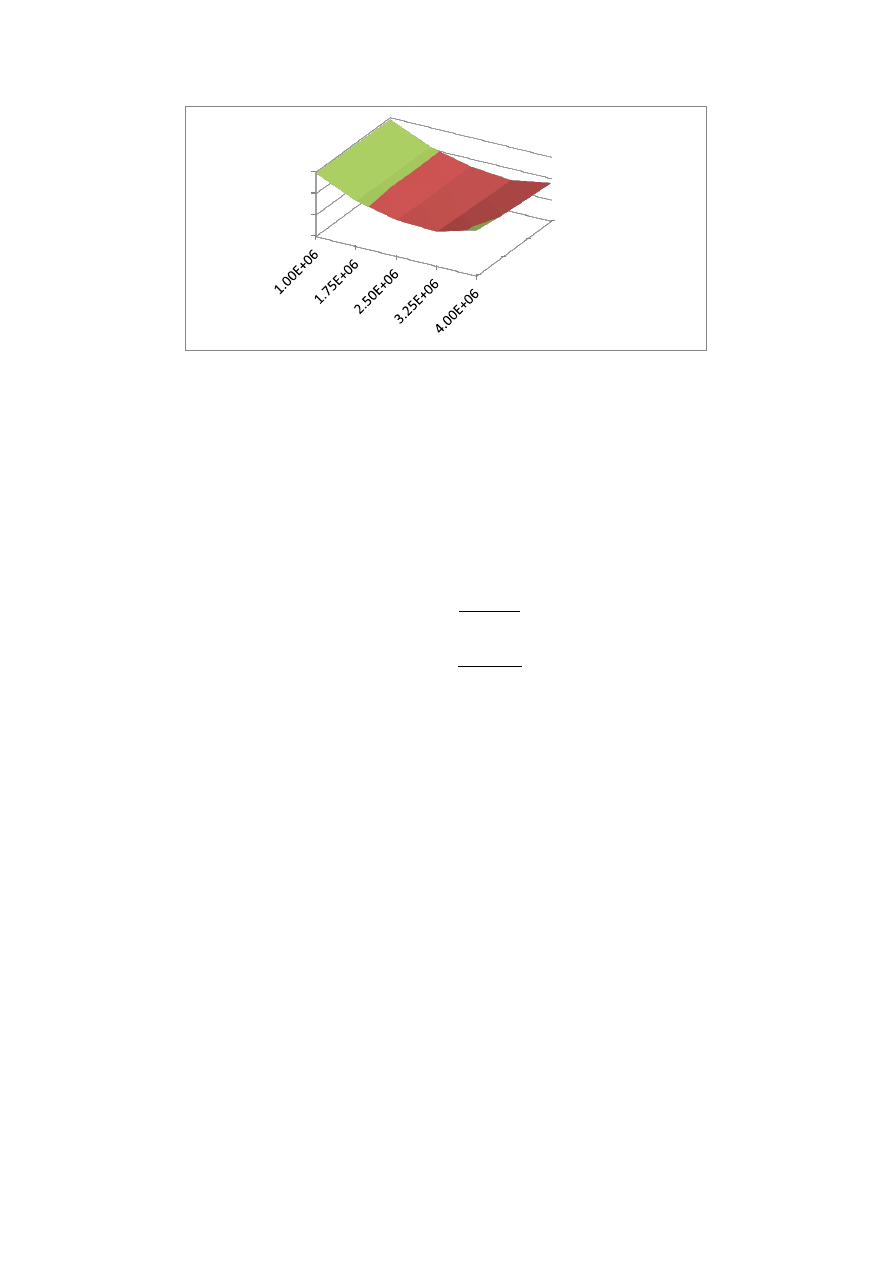
Proszę sporządzić mapy przedstawiające wartości wskaźników opisanych zależnościami (1) i
(2) w funkcji sprężystości i tłumienia układu stabilizacji drgań – przykładowe rysunki poniżej.
2.50E+03
1.75E+04
0
2
4
6
tłumienie
[N/(m/s)]
sztywność [N/m]
a
z
vs. k
s
vs. c
s
Na podstawie map (względnie tabel stworzonych w celu ich opracowania, vide tabela 2) dla
każdego przebadanego układu podwoziowego proszę wskazać nastawy stabilizatora najlep-
sze (spośród sprawdzonych) z punktu widzenia kryterium komfortu operatora i wysypu urob-
ku z łyżki. Czy parametry optymalne z punktu widzenia obu kryteriów są identyczne? Jeśli nie,
proszę określić, które nastawy korzystniej jest przyjąć regulując układ stabilizacji drgań w rze-
czywistej ładowarce.
PYTANIE POMOCNICZE: Proszę dla każdego kryterium określić jak duży jest wpływ wprowa-
dzenia układu stabilizacji na poprawę zachowania ładowarki. Jako wskaźnik opisujący popra-
wę komfortu pracy operatora i redukcji wysypu ładunku z łyżki należy przyjąć ilorazy:
𝑊
𝑚𝑖𝑛
=
𝑤
𝑠𝑡𝑎𝑏𝑚𝑖𝑛
𝑤
𝑛𝑠𝑡
𝑊
𝑚𝑎𝑥
=
𝑤
𝑠𝑡𝑎𝑏𝑚𝑎𝑥
𝑤
𝑛𝑠𝑡
w
stabmin
– najmniejsza odnotowana wartość wskaźnika (1) lub (2) przy zastosowaniu układu stabi-
lizacji drgań
w
stabmax
– największa odnotowana wartość wskaźnika (1) lub (2) przy zastosowaniu układu stabi-
lizacji drgań
w
nst
– wartość wskaźnika dla przejazdu maszyną po nierównościach z zablokowaną łyżką
Proszę przedyskutować wpływ struktury układu podwoziowego na wartości wskaźników
(1) i (2).
3. Stateczność wywrotna
Celem zadania jest wytypowanie układu podwoziowego najkorzystniejszego z punktu widzenia sta-
teczności wywrotnej modelowanego pojazdu.
W zadaniu należy przeprowadzić 4 symulacje polegające na najeździe jedną stroną pojazdu na nie-
równość w postaci rampy. Symulacje należy przeprowadzić dla każdego spośród dających się realizo-
wać przy pomocy modelu układu podwoziowego, tj.:
podwozia sztywnego,
podwozia z wahliwym mostem,
podwozia z poziomą osią wahań,
2.50E+03
1.75E+04
4.2
4.3
4.4
4.5
tłumienie
[N/(m/s)]
sztywność [N/m]
a
zas
vs. k
s
vs. c
s
podwozia z osią wahań nachyloną pod kątem 15 stopni.
Plik z profilem drogi zostanie dostarczony.
Na podstawie symulacji należy określić jaki jest przybliżony maksymalny kąt nachylenia nierówności,
poprzecznej, po której pojazd może się poruszać bez utraty stateczności. Jako moment utraty sta-
teczności należy przyjąć chwilę, w której reakcja pod przednim lewym kołem jest równa 0.
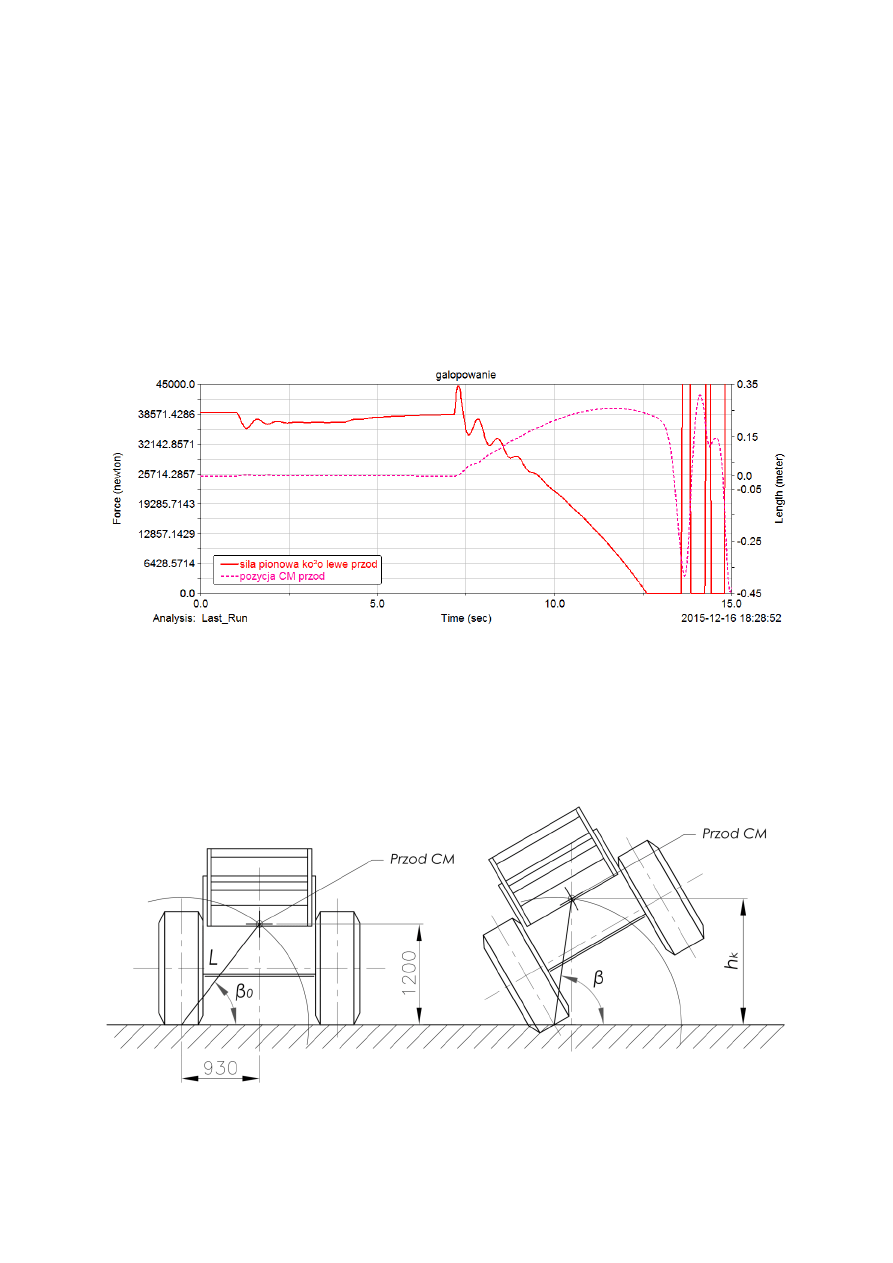
NA ZALICZENIE (do raportu):
Przedstawić wykresy zależności siły reakcji pionowej pod przednim lewym kołem oraz
położenia środka ciężkości przedniego członu maszyny względem chwili początkowej ruchu
Na podstawie odczytanej początkowej i maksymalnej wysokości środka ciężkości członu
przedniego (vide wykres powyżej) i wymiarów geometrycznych maszyny obliczyć w przybli-
żeniu maksymalny kąt nachylenia nierówności poprzecznej, po której pojazd może poruszać
się bez utraty stateczności. Jako podpowiedź, w obliczeniach uproszczonych wykorzystać
można poniższy rysunek. Proszę zwrócić uwagę, że w rzeczywistych warunkach krawędź wy-
wrotu będzie lokować się nie w środku powierzchni styku koła z nawierzchnią, lecz bliżej ze-
wnętrznej krawędzi koła.
Określić, który z układów podwoziowych jest najkorzystniejszy z punktu widzenia stateczno-
ści wywrotnej maszyny o modelowanych gabarytach i masie.
Wyszukiwarka
Podobne podstrony:
instrukcja projekt zespol 3
instrukcja projekt zespol 2
INSTRUKCJA OBSŁUGI ŁADOWARKI Z FUNKCJĄ PODTRZYMANIA NAPIĘCIA
INSTRUKCJA eksploatacji ładowarki Komatu Hanomag(1)
instrukcja projektu, Geodezja PW, Stare dzieje, GOG
instrukcja projekt zespol 5
Instrukcja projekt SIP Nawigacja
Instrukcja BHP ładowanie akumulatorów, Instrukcje BHP i Ppoż
instrukcja projekt zespol 6
instrukcja projekt zespol 1
Podnośnik instrukcja projektu
Instrukcja projektowania i budowy zewnetrznych instalaci kanalizacyjnych z PP KACZMAREK
INSTRUKCJA Regulator ładowania solarny PWM EL WP30DU 30A
instrukcja obslugi ladowarki everactive nc 1000
koparko ładowarka, instrukcje BHP
więcej podobnych podstron