Silniki skokowe, zwane
te¿ krokowymi, s¹ szero-
ko stosowne w sprzêcie
elektronicznym. W arty-
kule omówiono ich pod-
stawowe typy, zasadê
dzia³ania, parametry
i metody sterowania.
S
ilnik skokowy jest elektromecha-
nicznym przetwornikiem energii
elektrycznej, doprowadzonej do
pasm jego uzwojenia, w energiê
mechaniczn¹ ruchu obrotowego o charakte-
rze dyskretnym. Przetwarzanie energii odby-
wa siê w takt impulsów steruj¹cych doprowa-
dzonych do pasm uzwojenia, bez konieczno-
ci stosowania jakichkolwiek pêtli sprzê¿enia
zwrotnego. Silnik skokowy ma najczêciej
jedno, dwa, trzy lub piêæ pasm uzwojenia
rozmieszczonych na biegunach stojana, lub
(rzadziej) roz³o¿onych w jego ¿³obkach. Do-
prowadzona sekwencja impulsów steruj¹-
cych do pasm uzwojenia wywo³uje okrelo-
ny rozp³yw pr¹dów w tych pasmach wyzna-
czaj¹c po³o¿enie wektora strumienia ma-
gnetycznego w magnetowodzie silnika.
Zmieniaj¹ce siê skokowo po³o¿enie wekto-
ra strumienia magnetycznego stojana le-
dzone jest przez wirnik, a ka¿de przemie-
szczenie siê wektora strumienia powoduje
zmianê po³o¿enia wirnika zwan¹ skokiem.
Dla ka¿dego rodzaju silnika i w zale¿noci
od sposobu jego zasilania istnieje okrelo-
na liczba uk³adów napiêæ zasilaj¹cych do-
prowadzonych do jego uzwojeñ, po przekro-
czeniu której zaczynaj¹ siê one powtarzaæ.
Ka¿dy z takich uk³adów nosi nazwê taktu
komutacji i odpowiada mu okrelone po³o-
¿enie wirnika. Wszystkie mo¿liwe takty ko-
mutacji tworz¹ cykl komutacji w trakcie
którego wektor strumienia magnetycznego
obróci siê o 360 stopni elektrycznych (2
π
ra-
dianów elektrycznych).
Silniki skokowe nale¿¹ do grupy silników
synchronicznych, gdy¿ wirnik pod¹¿a syn-
chronicznie za skokowo przemieszczaj¹-
cym siê wektorem strumienia magnetyczne-
go pasm uzwojenia. rednia prêdkoæ wi-
rowania wirnika jest wprost proporcjonal-
na do czêstotliwoci impulsów steruj¹cych,
a d³ugoæ przebytej drogi w ruchu jest
wprost proporcjonalna do liczby podanych
sekwencji impulsów. Kierunek wirowania
zale¿y od kolejnoci doprowadzonych im-
pulsów do odpowiednich pasm uzwojenia.
SILNIKI SKOKOWE
(1)
Jedn¹ z najistotniejszych zalet silnika sko-
kowego jest jego zdolnoæ do precyzyjnego
pozycjonowania bez koniecznoci stosowa-
nia pêtli sprzê¿enia zwrotnego podaj¹cej in-
formacjê o po³o¿eniu. Pozwala to wyelimi-
nowaæ drogie czujniki po³o¿enia, jak np. kode-
ry optyczne czy transformatory po³o¿enia k¹-
towego. ledzenie sekwencji impulsów steru-
j¹cych wystarczy do okrelenia pozycji wa³u.
Do zalet silników skokowych mo¿na zaliczyæ:
q
zdolnoæ do precyzyjnego pozycjonowa-
nia; a powtarzalnoæ ruchu obarczona jest
niewielkim (3
÷
5% wartoci skoku) b³êdem
i b³¹d ten nie kumuluje siê w trakcie ruchu,
q
szeroki zakres czêstotliwoci impulsów
steruj¹cych: od 0 do ok. 30 kHz,
q
zdolnoæ do rozwijania najwiêkszego
momentu w stanie spoczynku,
q
du¿a trwa³oæ i niezawodnoæ; jedynym
elementem zu¿ywaj¹cym siê s¹ ³o¿yska.
Drobne mankamenty zwi¹zane ze stoso-
waniem silników skokowych to:
q
sk³onnoæ do oscylacyjnego charakteru
skokowego przemieszczania siê wirnika; jest
to istotne dla pojedynczych skoków, dla ma-
³ych czêstotliwoci komutacji oraz dla proce-
su ustalania siê po³o¿enia koñcowego po
serii impulsów wiêkszej czêstotliwoci,
q
mo¿liwoæ wyst¹pienia rezonansu, jeli
czêstotliwoæ impulsów steruj¹cych jest zbli-
¿ona do czêstotliwoci drgañ w³asnych sil-
nika skokowego i uk³adu mechanicznego,
w którym pracuje,
q
trudnoci ze sterowaniem przy skrajnie
wysokich czêstotliwociach.
Typy silników skokowych
W zale¿noci od konstrukcji wirnika rozró¿-
nia siê trzy podstawowe typy silników sko-
kowych:
q
z wirnikiem czynnym (z magnesem trwa-
³ym w wirniku),
q
z wirnikiem biernym (reluktancyjnym),
q
z wirnikiem hybrydowym.
Wirnik czynny zawiera magnes trwa³y wie-
lobiegunowy. Im wiêcej biegunów magnesu,
tym drobniejszy skok wirnika, jednak uzyska-
nie równomiernego namagnesowania przy
du¿ej liczbie biegunów mo¿e byæ trudne,
a nierównomierne namagnesowanie spowo-
duje, ¿e poszczególne skoki wirnika nie bê-
d¹ jednakowe. Wspó³dzia³anie strumienia
magnesu i strumienia pasm uzwojenia po-
zwala uzyskaæ stosunkowo du¿¹ wartoæ
momentu elektromagnetycznego oraz dobre
t³umienie oscylacji ruchu.
Wirnik bierny wykonany jest z blachy elek-
trotechnicznej w postaci uzêbionej (reluktan-
cyjnej) i nie zawiera ¿adnego elementu wy-
twarzaj¹cego strumieñ magnetyczny. Im
wiêcej zêbów wirnika, tym drobniejszy skok
wirnika i w zasadzie nie ma tu ograniczeñ
technologicznych. Jednak ze wzrostem licz-
by zêbów wirnika maleje mo¿liwy do uzyska-
nia moment elektromagnetyczny; ma³e jest
tak¿e t³umienie oscylacji ruchu.
Wirnik hybrydowy silnika skokowego ³¹czy
w sobie dodatnie cechy obu wy¿ej wymie-
nionych konstrukcji: dwubiegunowy ma-
gnes cylindryczny namagnesowany osio-
wo zaopatrzony jest po obu koñcach w drob-
no uzêbione wieñce ferromagnetyczne.
Otrzymuje siê w ten sposób silnik o ma³ym
skoku, du¿ej wartoci momentu elektroma-
gnetycznego i o dobrym t³umieniu.
Zasada dzia³ania
Zasada dzia³ania silników skokowych zwi¹-
zana jest z dyskretn¹ (skokow¹) zmian¹
po³o¿enia wektora strumienia magnetyczne-
go pasm uzwojenia silnika, co osi¹ga siê
przez impulsowe wzbudzanie lub prze³¹-
czanie wzbudzenia pasm uzwojenia.
Silnik o wirniku z magnesem
trwa³ym
W silniku o wirniku z magnesem trwa³ym wir-
nik d¹¿y do takiego ustawienia siê wzglê-
dem pola uzwojenia stojana, aby strumieñ
magnesu trwa³ego by³ wspó³liniowy (czyli
mia³ ten sam kierunek i ten sam zwrot) ze
strumieniem pasm uzwojenia. Jeli wirnik
znajduje siê w innym po³o¿eniu, to w silni-
ku dzia³a moment elektromagnetyczny
o wartoci proporcjonalnej do iloczynu war-
toci obu strumieni i sinusa k¹ta miêdzy
Radioelektronik Audio-HiFi-Video 8/2003
Radian elektryczny
Rozpatrywanie zjawisk elektromagnetycznych
w maszynie elektrycznej mo¿na ograniczyæ do
jednego okresu przebiegu tych zjawisk. Powta-
rzalnoæ przebiegu np. momentu elektroma-
gnetycznego w ramach pe³nego obrotu (czyli
o 2
π
radianów lub 360
o
) wirnika silnika skoko-
wego zale¿y od liczby p par biegunów silników
z magnesami trwa³ymi lub od liczby Z
r
zêbów
wirnika silników reluktancyjnych i hybrydowych,
i nastêpuje odpowiednio co (2
π
/p) rad (lub
(360
o
/p)) lub (2
π
/Z
r
) rad (lub (360
o
/Z
r
)).
Jednemu okresowi zmian momentu elektroma-
gnetycznego przypisuje siê wartoæ 2
π
rad, które
nazywa siê radianami elektrycznymi, w odró¿nie-
niu od 2
π
rad (mechanicznych), które odpowia-
daj¹ pe³nemu obrotowi wirnika. Zwi¹zki miêdzy
k¹tem
ϑ
fizycznego obrotu wirnika a jego odpo-
wiednikiem
ϑ
e
w mierze k¹tów elektrycznych s¹
nastêpuj¹ce:
ϑ
e
= p
ϑ
oraz
ϑ
e
= Z
r
ϑ
, co oznacza,
¿e przy obrocie wirnika o pe³en obrót otrzymuje
siê p lub Zr fal przebiegu momentu elektroma-
gnetycznego.
21
zwrotami tych strumieni, pomno¿onego
przez liczbê par biegunów magnesu trwa³e-
go. Natomiast w silniku o wirniku reluktan-
cyjnym wirnik d¹¿y do takiego ustawienia siê
wzglêdem pola uzwojenia stojana, aby re-
luktancja na drodze strumienia pasm uzwo-
jenia stojana by³a jak najmniejsza. Jeli wir-
nik znajduje siê w innym po³o¿eniu, to w sil-
niku dzia³a moment elektromagnetyczny
o wartoci proporcjonalnej do iloczynu kwa-
dratu wartoci strumienia pasm uzwojenia
i sinusa k¹ta miêdzy kierunkiem strumienia
a kierunkiem osi wirnika o najlepszej prze-
wodnoci magnetycznej, pomno¿onego
przez liczbê zêbów wirnika.
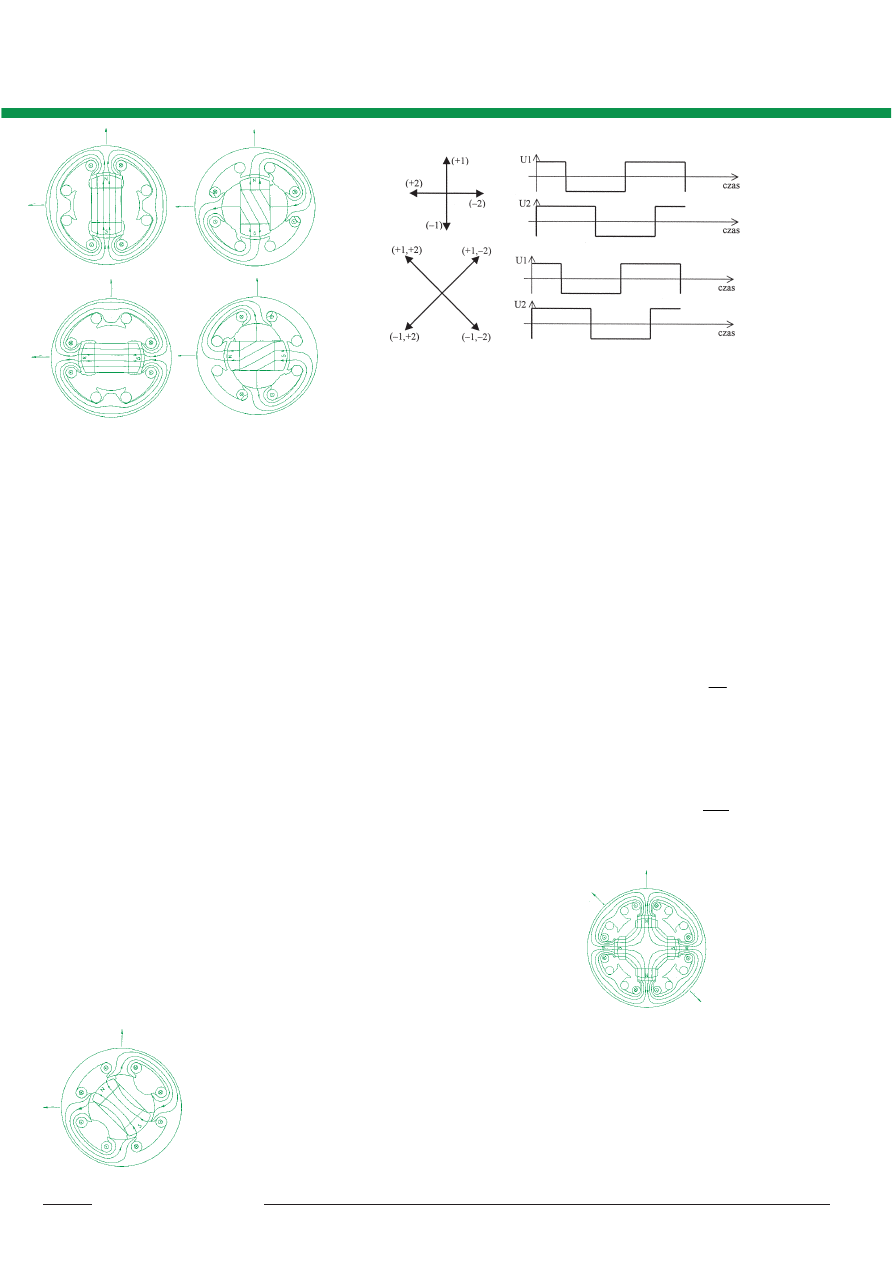
Na rys. 1 przedstawiono zasadê dzia³ania sil-
nika skokowego o wirniku z magnesem trwa-
³ym namagnesowanym dwubiegunowo. Na
czterech biegunach ferromagnetycznego
stojana znajduje siê uzwojenie w postaci
czterech cewek, które mog¹ byæ zasilane
niezale¿nie lub jako po³¹czone w dwa pasma:
ka¿de pasmo sk³ada siê z dwóch, przeciwle-
g³ych cewek. Sposób zasilania pojedynczych
cewek, pojedynczych pasm czy wszystkich
cewek powinien byæ taki, aby wytworzyæ po-
le magnetyczne o takiej samej liczbie biegu-
nów co wirnik. Dla silnika skokowego o wir-
niku z magnesem trwa³ym cewki ³¹czy siê
w uzwojenie dwupasmowe i ka¿de pasmo
zasila siê niezale¿nym napiêciem o prze-
Radioelektronik Audio-HiFi-Video 8/2003
ci¹¿onego wirnika _ dla zasilania (+1,+2) -
przedstawiono na rys. 2. Przy komutacji
uzwojeñ parami uzyskuje siê lepsze wyko-
rzystanie silnika, gdy¿ ca³y czas pracuje
ca³e uzwojenie, co w rezultacie zaowocuje
zwiêkszeniem wartoci maksymalnej
momentu elektromagnetycznego (w przy-
padku opisywanego silnika moment
wzronie teoretycznie
√
2-krotnie).
Na rys. 3 przedstawiono przebiegi napiêæ
pasmowych i cyklogramy wektora stru-
mienia pasm dla komutacji czterotaktowej
silnika z rys. 1.
Dla silnika o wirniku z magnesem trwa³ym:
skok wektora strumienia uzwojenia wynosi
rad elektr.
skok mechaniczny wirnika wynosi
rad,
a liczba taktów komutacji symetrycznej:
pm
2
2
π
=
α
m
e
2
2
π
=
α
miennej biegunowoci (zasilanie napiêcio-
we bipolarne).
Na rys.1a przedstawiono sytuacjê, gdy za-
silane jest pasmo 1 napiêciem o umownie
dodatniej biegunowoci, a wirnik znajduje siê
w takim po³o¿eniu, w którym jego strumieñ
pokrywa siê (co do kierunku i zwrotu) ze
strumieniem pasma 1. Jest to po³o¿enie
równowagi stabilnej. Jeli od³¹czyæ zasila-
nie pasma 1, a zasiliæ pasmo 2 umownie do-
datnim napiêciem, to wektor strumienia sto-
jana przemieci siê o 2
π
/4 rad w kierunku
przeciwnym do ruchu wskazówek zegara
(rys.1b). Na wirnik zadzia³a moment elektro-
magnetyczny, który spowoduje jego ruch
w kierunku pola stojana i wirnik zatrzyma siê
w po³o¿eniu, w którym jego strumieñ jest ko-
linearny ze strumieniem pasma 2 (rys.1c).
Kolejny skok, najpierw strumienia uzwojenia
stojana a za nim wirnika, zostanie wyko-
nany po od³¹czeniu zasilania pasma 2 i za-
sileniu pasma 1 napiêciem o przeciwnej
biegunowoci ni¿ dla przypadku przedsta-
wionym na rys.1a (rys.1d).
Przy opisanym sposobie zasilania otrzymu-
je siê komutacjê czterotaktow¹, co znaczy, ¿e
mo¿liwe s¹ tylko cztery ró¿ne uk³ady napiêæ
zasilaj¹cych pasma uzwojenia stojana daj¹-
ce cztery ró¿ne po³o¿enia wektora strumie-
nia stojana. Omówiony cyklogram komutacji
mo¿na zapisaæ skrótowo: (+1), (+2), (-1), (-2),
(+1),... Drugi kierunek wirowania uzyskuje
siê przy sekwencji prze³¹czeñ wg cyklogra-
mu: (+1), (-2), (-1), (+2), (+1),...
Podobn¹ komutacjê czterotaktow¹ mo¿na
zrealizowaæ zasilaj¹c jednoczenie oba pa-
sma uzwojenia napiêciami o kolejno zmie-
nianej biegunowoci, np. wg cyklogramu:
(+1,+2), (-1,+2), (-1,-2), (+1,-2), (+1,+2),...
Wówczas strumieñ wypadkowy uzwojenia
stojana, a za nim wirnik, bêd¹ zajmowa³y
kolejne po³o¿enia porednie w stosunku do
zilustrowanych na rys.1, tzn. przesuniête o
po³owê skoku podstawowego. Przyk³ad jed-
nego z takich po³o¿eñ stabilnych nieob-
1
1
2
1a
1b
1c
1d
2
2
2
1
1
2
1
Rys. 1. Ilustracja zasady dzia³ania silnika skokowe-
go o wirniku z magnesem trwa³ym namagnesowa-
nym dwubiegunowo; (1,2 _ numery pasm; strza³ki ze-
wnêtrzne _ osie pasm; strza³ki wewnêtrzne _ zwrot we-
ktora strumienia magnetycznego)
Rys. 2.
Przyk³ad
po³o¿enia
stabilnego
nieobci¹¿onego
wirnika silnika
z rys.1 przy
zasilaniu (+1,+2)
Rys. 3. Cyklogramy wektora strumienia pasm i przebiegi napiêæ pasmowych silnika z wirnikiem
z magnesem trwa³ym dwubiegunowym dla komutacji czterotaktowej symetrycznej
przy zasilaniu pasm pojedynczo (a) i parami (b)
b)
a)
Rys. 4.
Silnik skokowy
o wirniku
z magnesem
trwa³ym,
czterobiegunowy
1
2
2
k = 2 m
gdzie m oznacza liczbê pasm uzwojenia,
a p _ liczbê par biegunów.
Na rys. 4 przedstawiono przyk³ad silnika
skokowego o wirniku z magnesem trwa³ym
namagnesowanym czterobiegunowo w
po³o¿eniu równowagi bez obci¹¿enia, przy
zasilaniu pasma 1. Rozwi¹zanie tego typu
zapewnia drobniejszy skok wirnika: 2
π
/8
Wyszukiwarka
Podobne podstrony:
2003 08 12
2015 08 20 08 19 24 01
2015 08 20 08 21 07 01
2015 08 20 07 44 48 01
2015 08 20 08 13 57 01
edw 2003 08 s10
2015 08 20 08 23 45 01
2015 08 20 07 51 04 01
2015 08 20 08 24 37 01
2015 08 20 08 22 14 01
2015 08 20 08 11 47 01
2015 08 20 08 12 50 01
2015 08 20 07 48 34 01
2003 08 25 1490
2003 08 26
2015 08 20 08 07 57 01
2015 08 20 08 07 36 01
2015 08 20 08 18 16 01
więcej podobnych podstron