Politechnika Warszawska
Wydział Inżynierii Środowiska
Zakład Budownictwa Wodnego i Hydrauliki
Laboratorium nr 1
Pomiary sił i przemieszczeń, urządzenia i przetwornik do pomiaru
sił i przemieszczeń
Wykonali:
Nazwisko i Imię
Grupa Zespół Podpis
Andziak Izabella
5
3B
Kołodziej Izabela
5
3B
Pidek Elżbieta
5
3B
Sotniczuk Aleksandra
5
3B
Wiśniewska Justyna
5
3B
Termin:
0
-1 -2 inny
Prowadzący: dr inż. Eugeniusz Wilk
Data wykonania ćwiczenia: 26.10.2012 r.
Data oddania sprawozdania: ..................
Warszawa, 29.10.2012 r.
1.
Charakterystyka wykorzystanych przetworników do pomiaru przemieszczeń i
sił.
Przetworniki do pomiaru sił i przemieszczeń wykorzystuje się do badania parametrów
wytrzymałościowych materiałów. Do pomiarów wielkości sił służą dynamometry. Są to sprężyny o
takich kształtach, aby siła wywoływała duże przemieszczenie (łatwe do dokładnego zmierzenia). Do
ich wykonania wykorzystuje się stopy metali o dużej wytrzymałości (charakteryzujące się
prostoliniowym przebiegiem siły obciążającej w funkcji wydłużenia).
Istnieją trzy rodzaje siłomierzy:
dynamometry domowe (są to spiralne sprężyny z drutu);
dynamometry laboratoryjne do kalibracji sił przy rozciąganiu lub ściskaniu (element sprężysty
ma postać pałąka lub belki zginanej);
dynamometry służące do mierzenia momentu skręcającego.
Natomiast czujnikiem przemieszczenia jest zegarowy czujnik mikrometryczny. Jest to jeden z
prostszych przyrządów do pomiaru odkształcenia. Służy on głównie do pomiaru zmian długości
tensometrów mechanicznych.
Istotną czynnością wykonywania badań parametrów mechanicznych jest cechowanie (kalibracja)
przyrządów pomiarowych. Celem jest określenie kondycji metrologicznej wzorcowanego przyrządu,
określającej jego przydatność do wykonywania pomiarów.
2.
Schemat i opis stanowiska badawczego do kalibracji czujnika przemieszczenia i
dynamometru pałąkowego
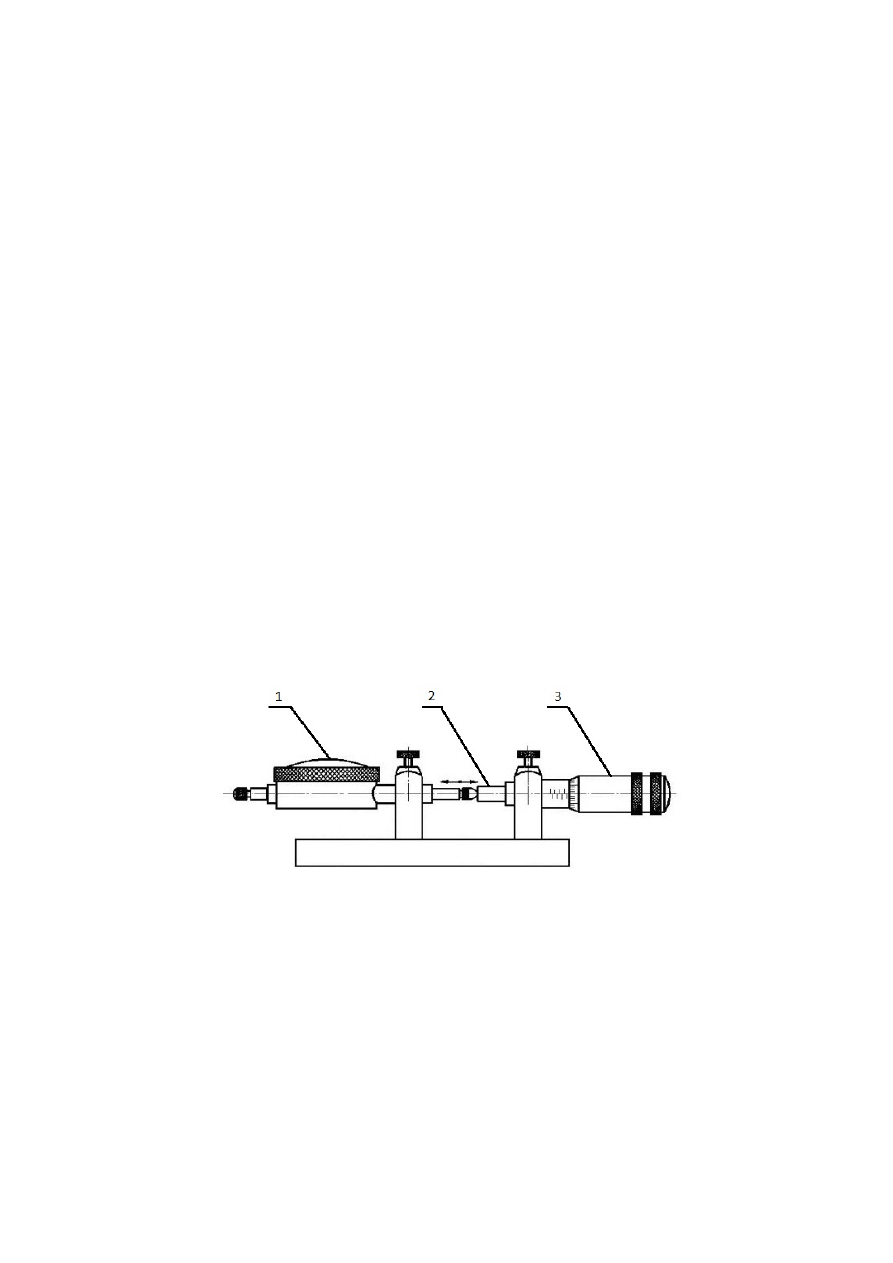
2.1. Czujnik zegarowy.
1. kalibrowany czujnik
2. przedłużony trzpienia
3. śruba mikrometryczna
Stanowisko badawcze do kalibracji czujnika zegarowego składa się ze śruby mikrometrycznej
wywołującej dokładnie ustalone przemieszczenie, oraz sprzęgniętego z nim czujnika zegarowego.
Czujnik połączono ze śrubą za pomocą specjalnego przedłużonego trzpienia, stanowiącego
jednocześnie podstawę urządzenia, oraz pręta przenoszącego przemieszczenie. Na początku kalibracji
śruba mikrometryczna ustawiona była w położeniu 0. Skalę czujnika zegarowego ustawiono także w
położeniu 0. Dokonywano pomiarów kalibracyjnych odczytując wskazania czujnika dla zadanego
położenia śruby mikrometrycznej. Dokonywano pomiarów raz zwiększając przemieszczenie, a raz
wracając do zerowego przemieszczenia, zmieniano przemieszczenie, co 0,5 [mm]. Wykonano trzy
serie pomiarowe.
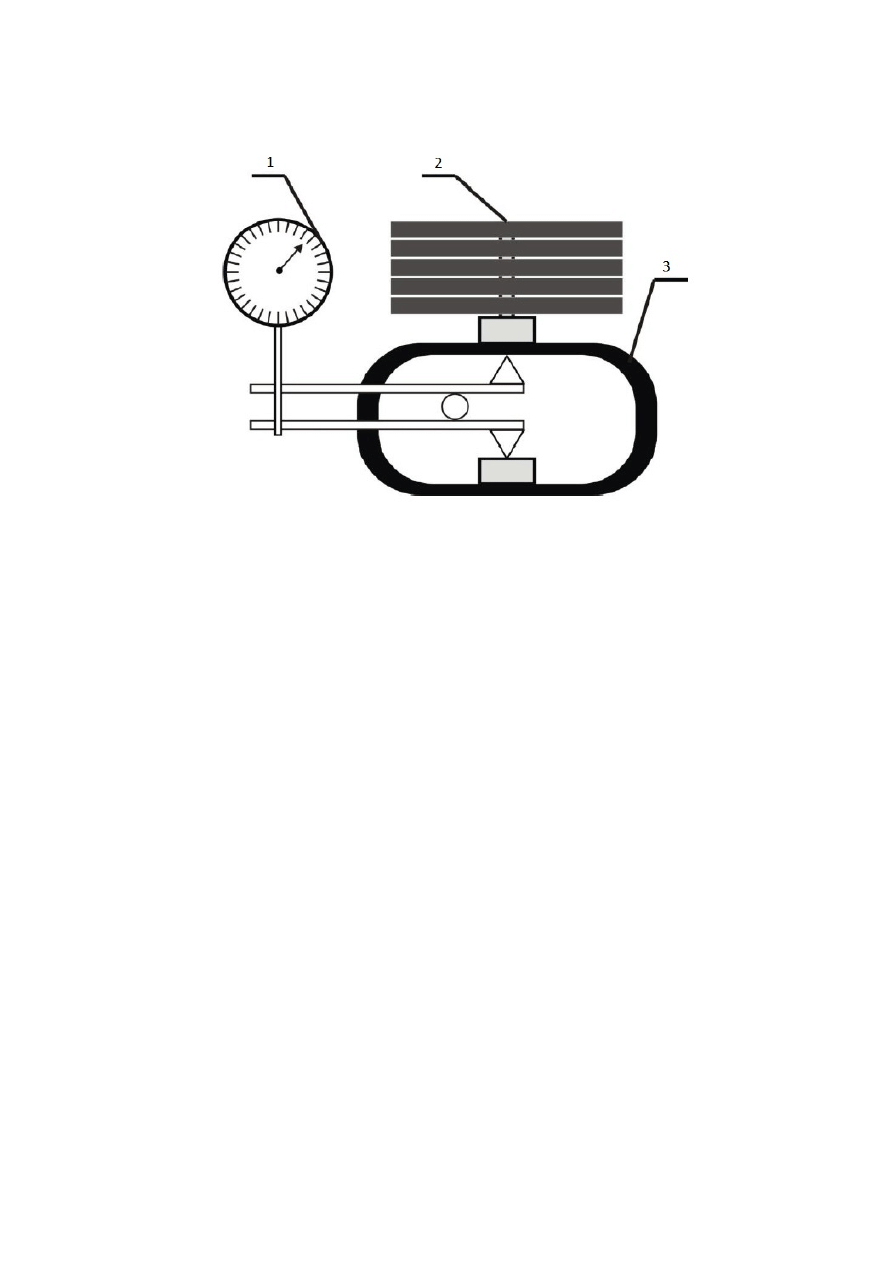
2.2. Dynamometr pałąkowy.
1. czujnik zegarowy
2. wycechowane obciążniki
3. dynamometr
Stanowisko badawcze do kalibracji dynamometru składa się z dynamometru, oraz zestawu
wzorcowych ciężarków o ciężarze wynoszącym dokładnie 5 [kG]. Dla obciążenia zerowego
ustawiono skalę wbudowanego czujnika zegarowego w położeniu 0. Następnie zadawano obciążenie
dokładając kolejne ciężarki o dokładnie ustalonym ciężarze, i odczytywano wskazania czujnika.
Najpierw dokładano ciężarki, następnie je zdejmowano. Pomiary przeprowadzono trzykrotnie.
3.
Wyniki kalibracji czujników.
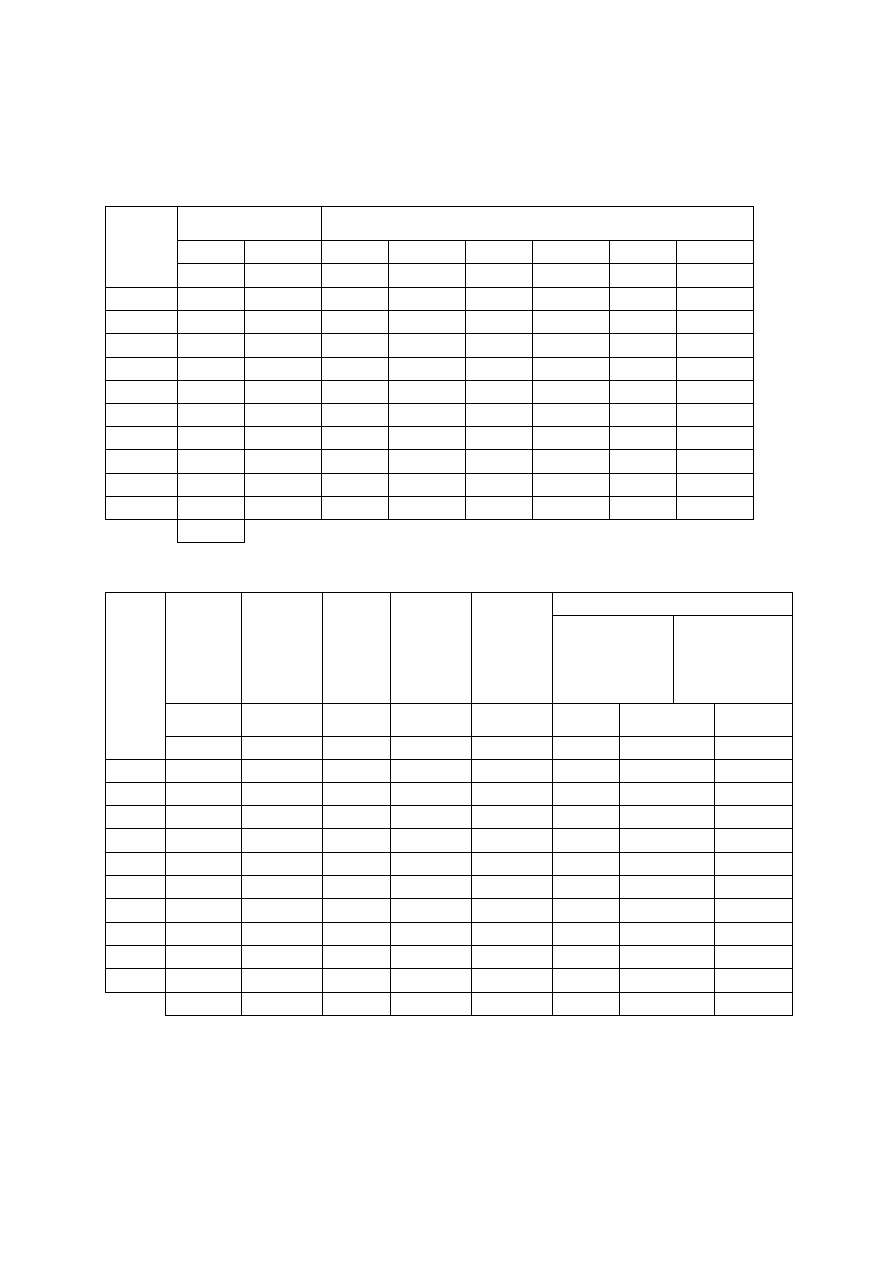
3.1. Dynamometr pałąkowy.
Zakres pomiarowy dynamometru: 5,00 – 50,00 kG
No
Ustawiony ciężar
Odczyt czujnika zegarowego: ↑obciążenie
↓odciążenie
W↓↑
∆W↓↑
O1↑
∆O1↑
O1↓
∆O1↓
O2↑
∆O2↑
[kG]
[kG]
[mm]
[mm]
[mm]
[mm]
[mm]
[mm]
1
5,00
5,00
0,2770
0,2770
0,3270
0,3270
0,2710
0,2710
2
10,00
10,00
0,6050
0,3280
0,6110
0,2840
0,5440
0,2730
3
15,00
15,00
0,8850
0,2800
0,8920
0,2810
0,8200
0,2760
4
20,00
20,00
1,121
0,2360
1,171
0,2790
1,098
0,2780
5
25,00
25,00
1,379
0,2580
1,446
0,2750
1,379
0,2810
6
30,00
30,00
1,695
0,3160
1,719
0,2730
1,663
0,2840
7
35,00
35,00
2,020
0,3250
1,989
0,2700
1,950
0,2870
8
40,00
40,00
2,293
0,2730
2,260
0,2710
2,240
0,2900
9
45,00
45,00
2,528
0,2350
2,534
0,2740
2,531
0,2910
10
50,00
50,00
2,793
0,2650
2,807
0,2730
2,824
0,2930
suma
275,00
Analiza statystyczna – wyznaczanie niepewności pomiarowych, charakterystyka urządzenia.
No
Wartość
średnia
Odchylenie
standardow
e średniej
Kwantyl
rozkładu
t-
Studenta
Niepewność
pomiarowa
Niepewność
względna
Charakterystyka urządzenia
∆= 20625
=
= ̅
=0,01871
=0,05589
̅ =
ś
̅
±
̅
=
+
[mm]
[mm]
[]
[mm]
[%]
[kG mm]
[mm2]
[mm]
0
0,2917
0,01775
2,3
0,04082
14,74%
1,458
25
0,03501
1
0,5867
0,02140
2,3
0,04922
8,137%
5,867
100
0,05150
2
0,8657
0,02292
2,3
0,05272
5,957%
12,98
225
0,06709
3
1,130
0,02155
2,3
0,04956
4,421%
22,60
400
0,08187
4
1,401
0,02233
2,3
0,05136
3,725%
35,03
625
0,09703
5
1,692
0,01622
2,3
0,03730
2,201%
50,77
900
0,1133
6
1,986
0,02025
2,3
0,04657
2,306%
69,52
1225
0,1297
7
2,264
0,01545
2,3
0,03554
1,550%
90,57
1600
0,1452
8
2,531 0,001732
2,3
0,00398
0,1580%
113,8
2025
0,1601
9
2,808 0,008963
2,3
0,02061
0,7380%
140,4
2500
0,1756
15,557
543,1
9625
3.2. Czujnik zegarowy.
Zakres pomiarowy czujnika zegarowego: 0,20 – 10,00 mm
No
Ustawienie śruby
mikrometrycznej
Odczyt czujnika zegarowego
O1↑ ∆O1↑ - zgodnie z ruchem wskazówek zegara
O2↓ ∆O2↓ - przeciwnie do ruchu wskazówek zegara
U
delta U
O1↑
∆O1↑
O1↓
∆O1↓
O2↑
∆O2↑
[mm]
[mm]
[mm]
[mm]
[mm]
[mm]
[mm]
[mm]
1.
0,50
9,50
0,495
0,4950
0,506
0,5060
0,496
0,4960
2.
1,00
9,00
0,997
0,5020
1,006
0,5000
0,994
0,4980
3.
1,50
8,50
1,500
0,5030
1,504
0,4980
1,494
0,5000
4.
2,00
8,00
2,003
0,5030
2,001
0,4970
1,995
0,5010
5.
2,50
7,50
2,505
0,5020
2,498
0,4970
2,497
0,5020
6.
3,00
7,00
3,006
0,5010
2,995
0,4970
3,000
0,5030
7.
3,50
6,50
3,506
0,5000
3,494
0,4990
3,503
0,5030
8.
4,00
6,00
4,004
0,4980
3,994
0,5000
4,005
0,5020
9.
4,50
5,50
4,501
0,4970
4,496
0,5020
4,506
0,5010
10.
5,00
5,00
4,998
0,4970
4,998
0,5020
5,006
0,5000
11.
5,50
4,50
5,496
0,4980
5,501
0,5030
5,504
0,4980
12.
6,00
4,00
5,994
0,4980
6,004
0,5030
6,001
0,4970
13.
6,50
3,50
6,494
0,5000
6,506
0,5020
6,498
0,4970
14.
7,00
3,00
6,995
0,5010
7,006
0,5000
6,995
0,4970
15.
7,50
2,50
7,498
0,5030
7,505
0,4990
7,494
0,4990
16.
8,00
2,00
8,001
0,5030
8,003
0,4980
7,994
0,5000
17.
8,50
1,50
8,504
0,5030
8,499
0,4960
8,496
0,5020
18.
9,00
1,00
9,006
0,5020
8,997
0,4980
8,998
0,5020
19.
9,50
0,50
9,506
0,5000
9,494
0,4970
9,501
0,5030
20.
10,00
0,00
10,005
0,4990
9,994
0,5000
10,004
0,5030
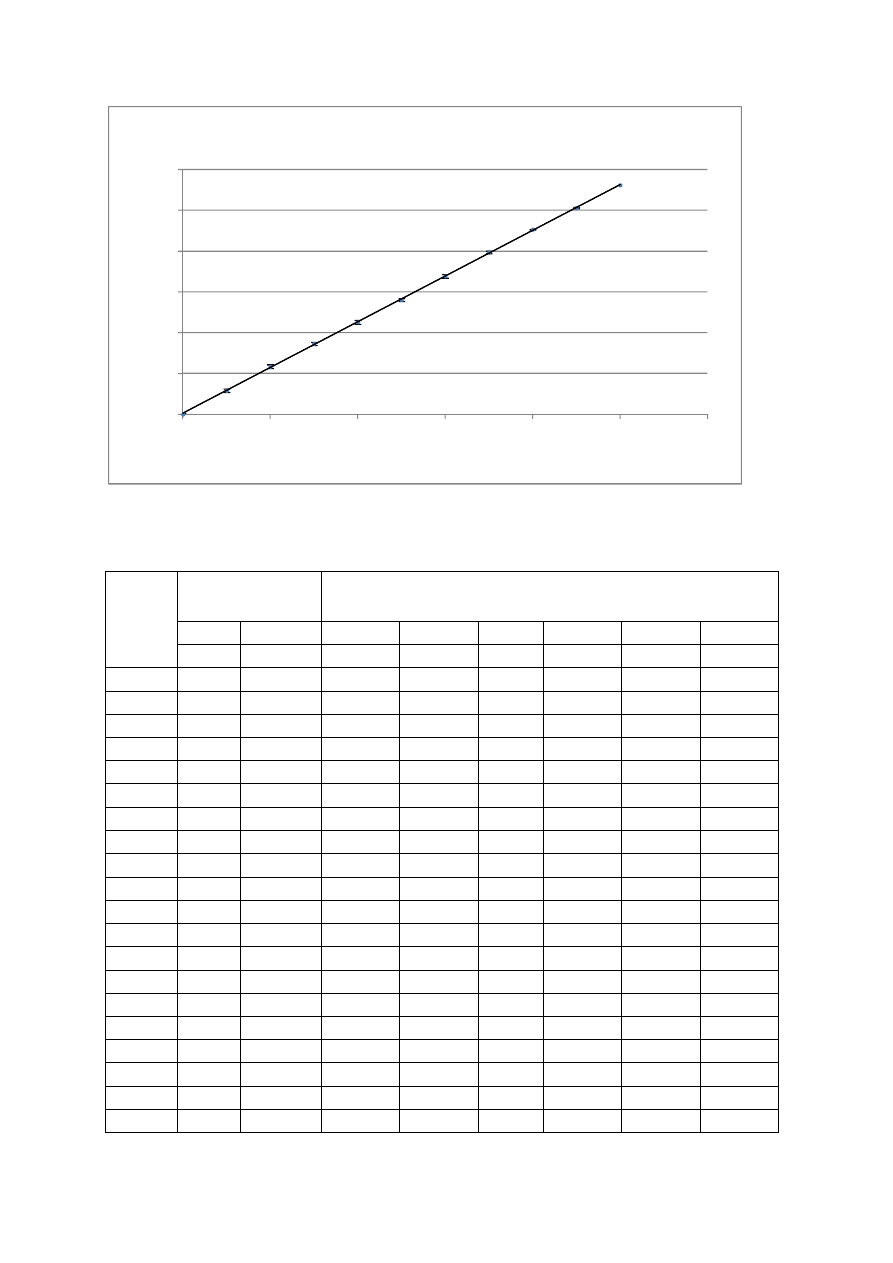
y = 0,0561x + 0,0128
0
0,5
1
1,5
2
2,5
3
0,00
10,00
20,00
30,00
40,00
50,00
60,00
W
sk
az
an
ie
c
zu
jn
ik
a
[
m
m
]
Obciążenie [kg]
Charakterystyka dynamometru
Analiza statystyczna – wyznaczanie niepewności pomiarowych, charakterystyka urządzenia.
No
Wartość
średnia
Odchylenie
standardow
e średniej
Kwantyl
rozkładu
t-
Studenta
Niepewność
pomiarowa
Niepewność
względna
Charakterystyka urządzenia
=
= ̅
∆= 3325
= −0,0003
= 1
̅ =
ś
̅
±
̅
=
+
[mm]
[mm]
[]
[mm]
[%]
[kG mm]
[mm2]
[mm]
1
0,4990 0,003512
2,10 0,007375
1,49%
0,2495
0,2500
0,50
2
0,9990 0,003606
2,10 0,007572
0,76%
0,9990
1,000
1,00
3
1,499 0,002906
2,10 0,006102
0,41%
2,2490
2,250
1,50
4
2,000 0,002404
2,10 0,005048
0,25%
3,9993
4,000
2,00
5
2,500 0,002517
2,10 0,005285
0,21%
6,2500
6,250
2,50
6
3,000 0,003180
2,10 0,006678
0,22%
9,0010
9,000
3,00
7
3,501 0,003606
2,10 0,007572
0,22%
12,25
12,25
3,50
8
4,001 0,003512
2,10 0,007375
0,18%
16,00
16,00
4,00
9
4,501 0,002887
2,10 0,006062
0,13%
20,25
20,25
4,50
10
5,001 0,002667
2,10 0,005600
0,11%
25,00
25,00
5,00
11
5,500 0,002333
2,10 0,004900
0,09%
30,25
30,25
5,50
12
6,000 0,002963
2,10 0,006222
0,10%
36,00
36,00
6,00
13
6,499 0,003528
2,10 0,007408
0,11%
42,25
42,25
6,50
14
6,999 0,003667
2,10 0,007700
0,11%
48,99
49,00
7,00
15
7,499 0,003215
2,10 0,006751
0,09%
56,24
56,25
7,50
16
7,999 0,002728
2,10 0,005730
0,07%
63,99
64,00
8,00
17
8,500 0,002333
2,10 0,004900
0,06%
72,25
72,25
8,50
18
9,000 0,002848
2,10 0,005981
0,07%
81,00
81,00
9,00
19
9,500 0,003480
2,10 0,007308
0,08%
90,25
90,25
9,50
20
10,00 0,003512
2,10 0,007375
0,07%
100,0
100,00
10,00
suma
105,00
717,5
717,5
4.
Analiza błędów w przeprowadzonych kalibracjach.
̅ =
1
̅ =
1
3
(0,2770 + 0,3270 + 0,2710) = 0,2917 [mm]
=
1
( − 1)
(
− ̅)
=
1
(3 − 1)
(0,2770 − 0,2917) = 0,03075 [
]
S
̅
=
√
S
̅
=
0,03075
√3
= 0,01775 [
]
=
+
∆ =
−
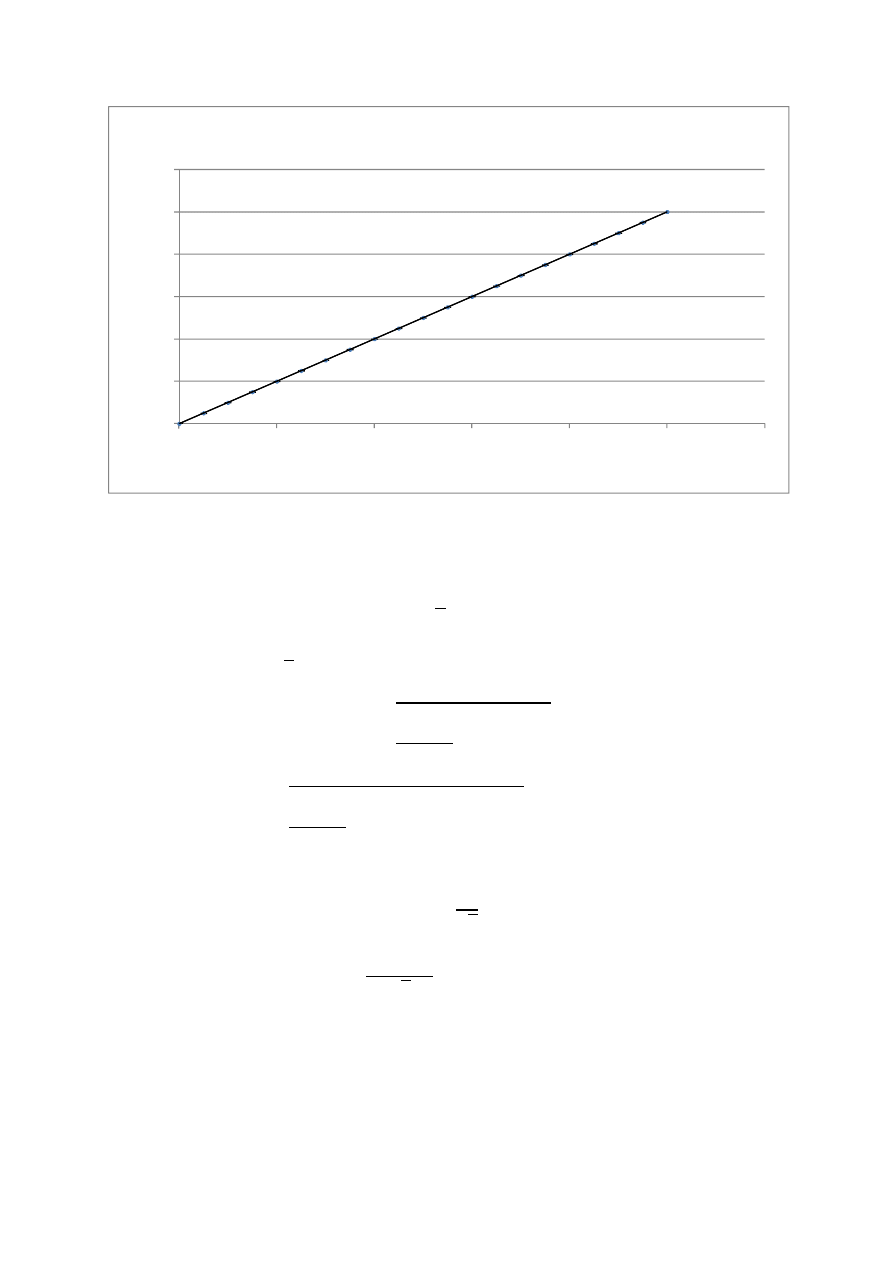
y = 1x - 0,0003
0
2
4
6
8
10
12
0
2
4
6
8
10
12
W
sk
az
an
ie
c
zu
jn
ik
a
[m
m
]
Przemieszczenie [mm]
Charakterystyka czujnika zegarowego

∆ = 10 ∗ 9625 − 275 = 20625
=
(∑
)(∑
) − (∑
)(∑
)
∆
=
9625 ∗ 15,557 − 275,00 ∗ 543,1
20625
= 0,01871
=
∑
− (∑
)(∑
)
∆
=
10 ∗ 543,1 − 275 ∗ 15,557
20625
= 0,05589
=
+
= 0,01871 + 0,05589 ∗
0,4990 = 0,50
5.
Wnioski
Uzyskawszy finalnie wykres funkcji liniowej stwierdzamy, iż materiał użyty do wykonania
przyrządów jest odpowiedni.
Otrzymane niepewności pomiarów są wartościami niewielkimi.
Posiadając gotowe dane nie jesteśmy jednak w stanie jednoznacznie ocenić wpływu błędów
pomiarowych na stan kalibracji przyrządu, jednakże uznając za wzorzec śrubę mikrometryczną
przyjmujemy niepewność pomiarów jako 0,01 mm, co jest wartością bardzo małą.
Wyszukiwarka
Podobne podstrony:
5 Pomiary sil skrawania id 4036 Nieznany (2)
Pomiarydc id 374638 Nieznany
8 Pomiary kierunkow i wyznaczn Nieznany
3 pomiar czestotliwosci fazy c Nieznany
cw01 pomiar czestotliwosci id 1 Nieznany
Pomiary Napięcia Przemiennego
44 pomiar nagrzewnicy powietrza Nieznany (2)
L1, a) POMIARY NAPIĘCIA PRZEMIENNEGO
dyfrakcja pomiar dlugosci fali Nieznany
Pomiary sił i naprężeń mechanicznych
O ZAKWATEROWANIU SIL ZBROJNYCH Nieznany
1 pomiary i jednostki fizycznei Nieznany (2)
Pomiary reczne i automatyczne n Nieznany
Niepewnosci pomiaru id 319236 Nieznany
Pomiary podstawowych wielkosci Nieznany
03 Badania i pomiary ukladow an Nieznany
Pomiary napiec przemiennych
więcej podobnych podstron