1
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Modelowanie i symulacja
dr inż. Piotr Piela
Zakład Metod Matematycznych
kontakt: pokój 28
ppiela@wi.ps.pl
2
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – sposoby opisu
Nieliniowe systemy dynamiczne:
opis
zależności
wejście-wyjście
za
pomocą
równań
różniczkowych,
opis za pomocą równań stanu.
Liniowe systemy dynamiczne:
opis zależności „wejście-wyjście” za pomocą równań
różniczkowych,
opis za pomocą równań stanu,
opis zależności „wejście-wyjście” w formie operatorowej
3
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Rachunek operatorowy
Operatory
odwzorowują wielkości wejściowe, będące funkcjami np.
czasu – w inne funkcje czasu – reprezentujące wielkości wyjściowe.
Posługiwanie się operatorami ułatwia obliczenia, gdyż pozwala
operacje na funkcjach zastąpić operacjami na liczbach.
4
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Przekształcenie Laplace'a
Przekształcenie Laplace'a
jest operatorem przekształcającym
funkcję zmiennej rzeczywistej f(t) na pewną funkcję F(s) zmiennej
zespolonej s = c + j
ω
zgodnie ze wzorem:
L
[ f t]=F s=
∫
0
∞
x
t⋅e
−st
dt
Odwrotne przekształcenie Laplace'a
– znając transformatę
funkcji F(s) możemy wyznaczyć samą funkcję f(t) za pomocą
wzoru:
f
t =L
−1
[ F s]=
1
2
j
∫
c
− j ∞
c
j ∞
F
s⋅e
st
ds ,
t0 ,
c = Re s
5
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny - model liniowy w przestrzeni stanów
{
˙X t=F
1
X t
0
,U t ,t
0
Y
t=F
2
X t
0
,U t , t
0
Dany jest system opisany równaniami stanu:
Dla liniowego systemu dynamicznego równania te można
przedstawić w formie macierzowej.
6
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny - model liniowy w przestrzeni stanów
C
D
y
1
y
2
⋮
y
p
=
c
11
c
12
⋯ c
1n
c
21
c
22
⋯ c
2n
⋮
⋮ ⋯ ⋮
c
p1
c
p2
⋯ c
pn
⋅
x
1
x
2
⋮
x
n
d
11
d
12
⋯ d
1m
d
21
d
22
⋯ d
2m
⋮
⋮
⋯
⋮
d
p1
d
p2
⋯ d
pm
⋅
u
1
u
2
⋮
u
m
A
B
˙x
1
˙x
2
⋮
˙x
n
=
a
11
a
12
⋯ a
1n
a
21
a
22
⋯ a
2n
⋮
⋮ ⋯ ⋮
a
n1
a
n2
⋯ a
nn
⋅
x
1
x
2
⋮
x
n
b
11
b
12
⋯ b
1m
b
21
b
22
⋯ b
2m
⋮
⋮ ⋯ ⋮
b
n1
b
n2
⋯ b
nm
⋅
u
1
u
2
⋮
u
m
7
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny - model liniowy w przestrzeni stanów
{
˙X t=A⋅X tB⋅U t
Y
t=C⋅X tD⋅U t
Postać równania stanów i równania wyjścia w postaci wektorowo-
macierzowej dla systemu liniowego stacjonarnego jest następująca:
gdzie:
A – macierz stanu, dim A = n x n
B – macierz wejścia, dim B = n x m,
C – macierz wyjścia, dim C = n x p,
D – bezpośrednia macierz transmisji, dim D = m x p
n – ilość stanów,
m – ilość wejść,
p – ilość wyjść,
X(t) – wektor stanu,
U(t) – wektor wejść,
Y(t) – wektor wyjść
8
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
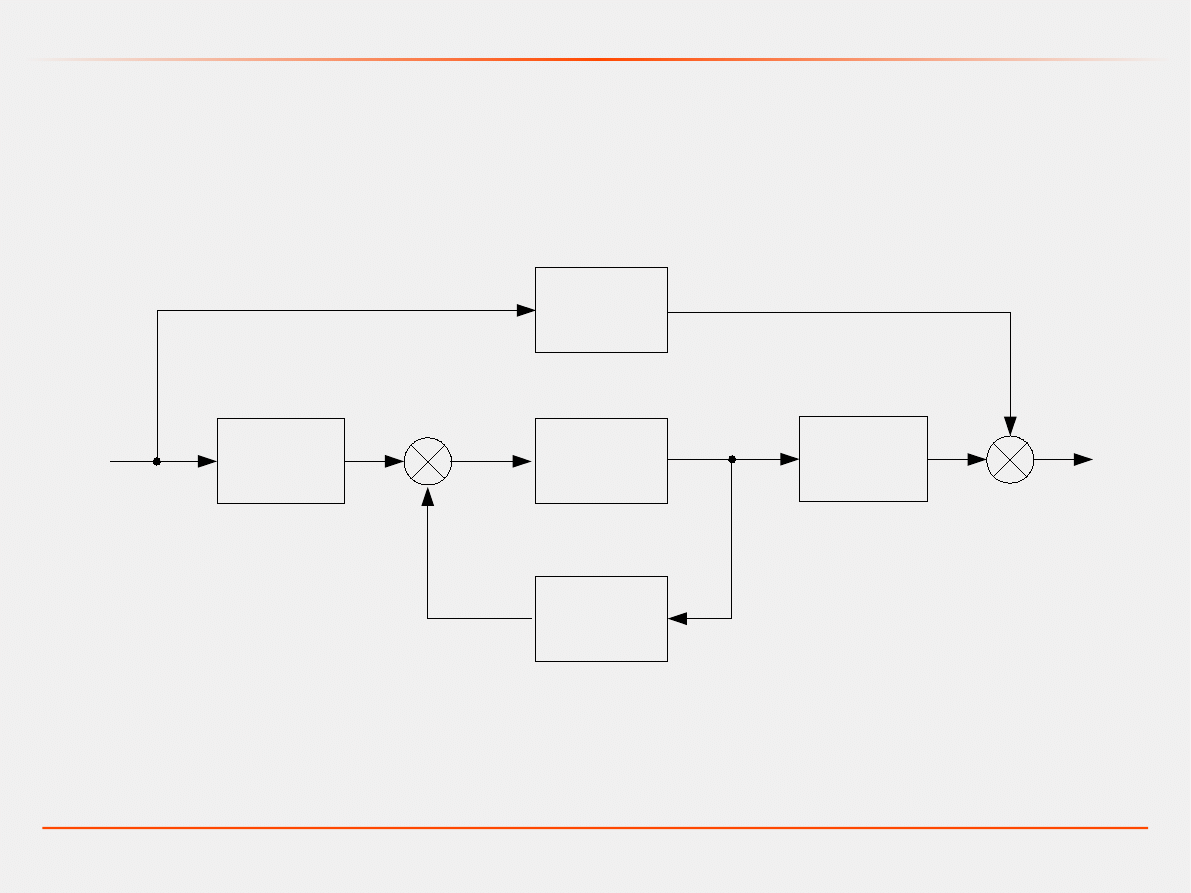
Model dynamiczny - model liniowy w przestrzeni stanów
{
˙X t=A⋅X tB⋅U t
Y
t=C⋅X tD⋅U t
D
+
A
C
B
∫
dt
+
+
+
U
t
Y
t
X
t
˙X t
9
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – równania stanu → transmitancja operatorowa
Zależność pomiędzy równaniami stanu i wyjścia a
transmitancją operatorową dla układu liniowego z jednym
wejściem i jednym wyjściem.
Stosując przekształcenie Laplace'a dla równań stanu i
wyjścia otrzymamy:
{
s X
s=A⋅X sB⋅U s
Y
s=C⋅X sD⋅U s
Przekształcając:
X
s=s⋅I −A
−1
⋅B⋅U s
Y
s=C⋅s⋅I −A
−1
⋅B⋅U sD⋅U s
Ostatecznie:
G
s=
Y
s
X
s
=C⋅s⋅I −A
−1
⋅BD
10
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
C
A
B
Model dynamiczny – równania stanu → transmitancja operatorowa
Przykład. Dany jest model liniowy w postaci równań stanu:
˙x
1
˙x
2
=
0
1
−1 −2
⋅
x
1
x
2
0
1
⋅u
y
t =−1 1⋅
x
1
x
2
G
s=
Y
s
X
s
=C⋅s⋅I −A
−1
⋅B
Poszukujemy transmitancji układu.
11
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – równania stanu → transmitancja operatorowa
Przykład.
G
s=−1 1⋅
s 0
0 s
−
0
1
−1 −2
−1
⋅
0
1
G
s=−1 1⋅
s
−1
1 s
2
−1
⋅
0
1
G
s=
s
1
s
2
2s1
12
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa → równania stanu
Dana jest transmitancja operatorowa systemu liniowego z
jednym wejściem i jednym wyjściem:
Wprowadzamy oznaczenia:
Otrzymamy:
G
s=
Y
s
U
s
=
b
m
s
m
b
m
−1
s
m
−1
b
0
a
n
s
n
a
n
−1
s
n
−1
a
0
b
m
s
m
b
m
−1
s
m
−1
b
0
=P s
a
n
s
n
a
n
−1
s
n
−1
a
0
=Qs
Q
s⋅Y s=Ps⋅U s
13
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa → równania stanu
Stosując odwrotne przekształcenie Laplace'a oraz
wprowadzając operator różniczkowania p=d/dt otrzymamy:
gdzie:
P
p=b
m
p
m
b
m
−1
p
m
−1
b
0
Q
p=a
n
p
n
a
n
−1
p
n
−1
a
0
Q
p⋅yt =P p⋅ut
Do równania wprowadzamy
nową zmienną x(t), tak że spełnione jest równanie:
Q
p⋅yt =P p⋅ut
y
t =P p⋅xt
14
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa → równania stanu
Otrzymamy:
Zapiszmy pierwsze równanie w postaci równania
różniczkowego:
{
Q
p⋅xt =u t
P
p⋅xt = yt
x
n
a
n
−1
x
n−1
a
1
˙xa
0
x
=u
Przekształcając podane równanie do układu równań
różniczkowych pierwszego rzędu otrzymamy:
˙x
1
˙x
2
⋮
˙x
n
=
0
1
⋯
0
0
0
⋯
0
⋮
⋮
⋯
⋮
−a
0
−a
1
⋯ −a
n
−1
⋅
x
1
x
2
⋮
x
n
0
0
⋮
1
⋅ut
15
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa → równania stanu
Zapiszmy drugie równanie w postaci równania
różniczkowego:
W postaci macierzowej możemy zapisać:
y
t =b
0
b
1
⋯ b
m
0
⋯ 0⋅
x
1
x
2
⋯
x
m
1
⋯
x
n
y
t =b
m
x
m
b
m
−1
x
m−1
b
1
˙xb
0
x
y
t =b
0
x
1
b
1
x
2
b
m
−1
x
m
b
m
x
m
1
16
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
C
B
A
Model dynamiczny – transmitancja operatorowa → równania stanu
Ostatecznie:
y
t =b
0
b
1
⋯ b
m
0
⋯ 0⋅
x
1
x
2
⋯
x
m
1
⋯
x
n
˙x
1
˙x
2
⋮
˙x
n
=
0
1
⋯
0
0
0
⋯
0
⋮
⋮
⋯
⋮
−a
0
−a
1
⋯ −a
n
−1
⋅
x
1
x
2
⋮
x
n
0
0
⋮
1
⋅ut
17
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa → równania stanu
Przykład. Pewien liniowy system opisany jest następującą
transmitancją operatorową:
G
s=
Y
s
U
s
=
b
1
s
b
0
a
2
s
2
a
1
s
a
0
Poszukujemy opisu tego systemu w przestrzeni stanu.
{
˙X t=A⋅X tB⋅U t
Y
t=C⋅X tD⋅U t
A, B, C, D ?
18
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa → równania stanu
G
s=
Y
s
U
s
=
b
1
s
b
0
s
2
a
1
s
a
0
G(s) odpowiada liniowemu równaniu różniczkowemu:
¨ya
1
˙ya
0
y
=b
1
˙ub
0
u
Uwzględniając zależność otrzymamy:
{
Q
p⋅xt=u t
P
p⋅xt= yt
{
¨xa
1
˙xa
0
x
=u
b
1
˙xb
0
x
= y
19
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa → równania stanu
Wprowadzając oznaczenia:
{
¨xa
1
˙xa
0
x
=u
b
1
˙xb
0
x
= y
x
=x
1,
˙x= ˙x
1
=x
2,
¨x= ˙x
2
dla pierwszego równania otrzymamy układ równań
różniczkowych pierwszego rzędu:
{
˙x
1
=x
2
˙x
2
=−a
0
x
1
−a
1
x
2
u
równanie wyjścia przyjmie postać:
y
=b
0
x
1
b
1
x
2
20
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
C
B
A
Model dynamiczny – transmitancja operatorowa → równania stanu
ostatecznie, w zapisie macierzowym:
{
˙x
1
=x
2
˙x
2
=−a
0
x
1
−a
1
x
2
u
˙x
1
˙x
2
=
0
1
−a
0
−a
1
⋅
x
1
x
2
0
1
⋅u
y
=b
0
b
1
⋅
x
1
x
2
y
=b
0
x
1
b
1
x
2
21
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – transmitancja operatorowa → równania stanu
Istnieją wzajemne ekwiwalentne przekształcenia pomiędzy
modelami matematycznymi opisanymi za pomocą
transmitancji a modelami opisanymi w przestrzeni stanów.
Ze względu na niejednoznaczność wyboru wektora
zmiennych stanu
jednej transmitancji może odpowiadać
zbiór modeli zapisanych w przestrzeni stanów.
Przekształcenie odwrotne jest jednoznaczne.
22
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny – związki pomiędzy różnymi formami opisu
Równania
stanu i wyjścia
Transmitancja
operatorowa
1 : 1
n : 1
23
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
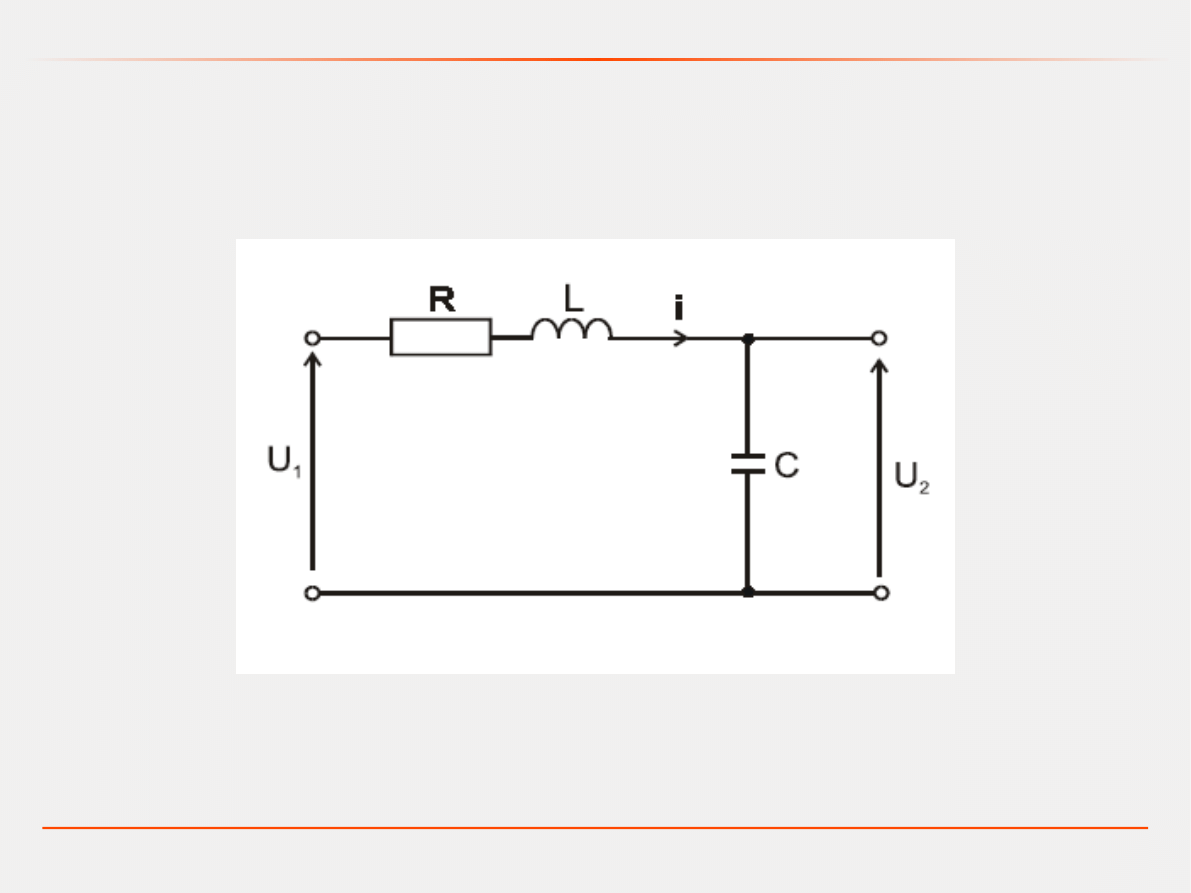
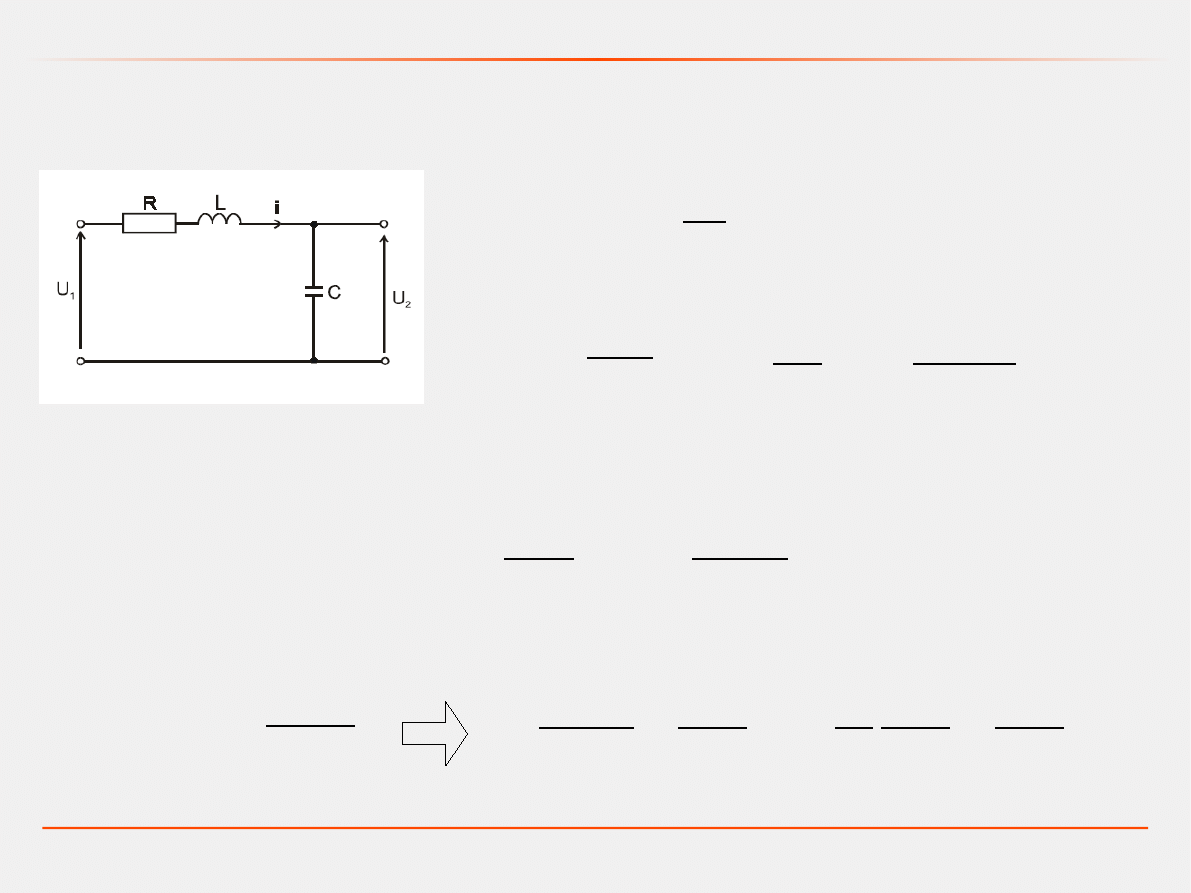
Model dynamiczny
Przykład. Obwód elektryczny RLC
Poszukujemy modelu w przestrzeni stanów i transmitancji.
24
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
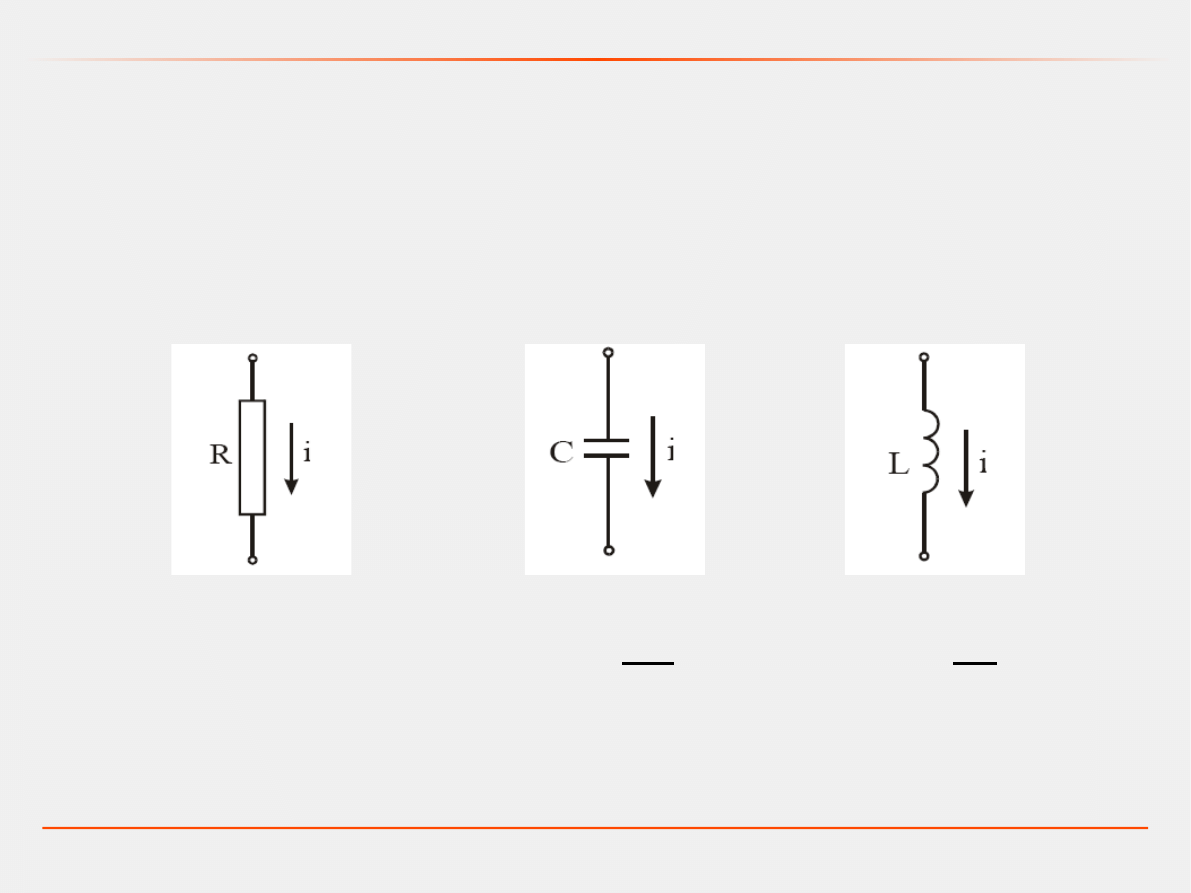
Model dynamiczny
Modele obwodów elektrycznych budujemy w oparciu o
prawo Ohma i prawa Kirchhoffa.
Rezystor
Pojemność
Indukcyjność
u
=R⋅i
i
=C
du
dt
u
=L
di
dt
25
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny
Stosujemy II prawo Kirchhoffa.
u
1
=RiL
di
dt
u
2
i
=C
du
2
dt
di
dt
=C
d
2
u
2
dt
2
u
1
=RC
du
2
dt
L C
d
2
u
2
dt
2
u
2
d
2
u
2
dt
2
=
1
LC
u
1
−
R
L
du
2
dt
−
1
LC
u
2
po podstawieniu otrzymujemy:
Obliczamy
d
2
u
2
dt
2
26
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny
¨u
2
=
1
LC
u
1
−
R
L ˙
u
2
−
1
LC
u
2
{
˙x
1
=x
2
˙x
2
=
1
LC
u
1
−
R
L
x
2
−
1
LC
x
1
Równanie II rzędu zapisujemy w postaci układu równań
różniczkowych I rzędu:
Równanie stanu i równanie wyjścia:
˙x
1
˙x
2
=
0
1
−
1
LC
−
R
L
⋅
x
1
x
2
0
1
LC
⋅u
1
y
=
1 0
⋅
x
1
x
2
27
MODELOWANIE I SYMULACJA
Szczecin - 2006-06-01
Model dynamiczny
Transmitancja operatorowa:
s
2
u
2
s=
1
LC
u
1
s−
R
L
s u
2
s−
1
LC
u
2
s
s
2
R
L
s
1
LC
u
2
s=
1
LC
u
1
s
u
2
s
u
1
s
=
1
LC
s
2
R
L
s
1
LC
=
1
LCs
2
RCs1
¨u
2
=
1
LC
u
1
−
R
L ˙
u
2
−
1
LC
u
2
Wyszukiwarka
Podobne podstrony:
MIS wyklad 7
MIS wyklad 1
MIS wyklad 2
MIS wyklad 9
MiS wykład5 6
MIS wyklad 8
MIS wyklad 5
MIS wyklad 3
MIS wyklad 4
MIS wyklad 7
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
więcej podobnych podstron