PODSTAWY AUTOMATYKI
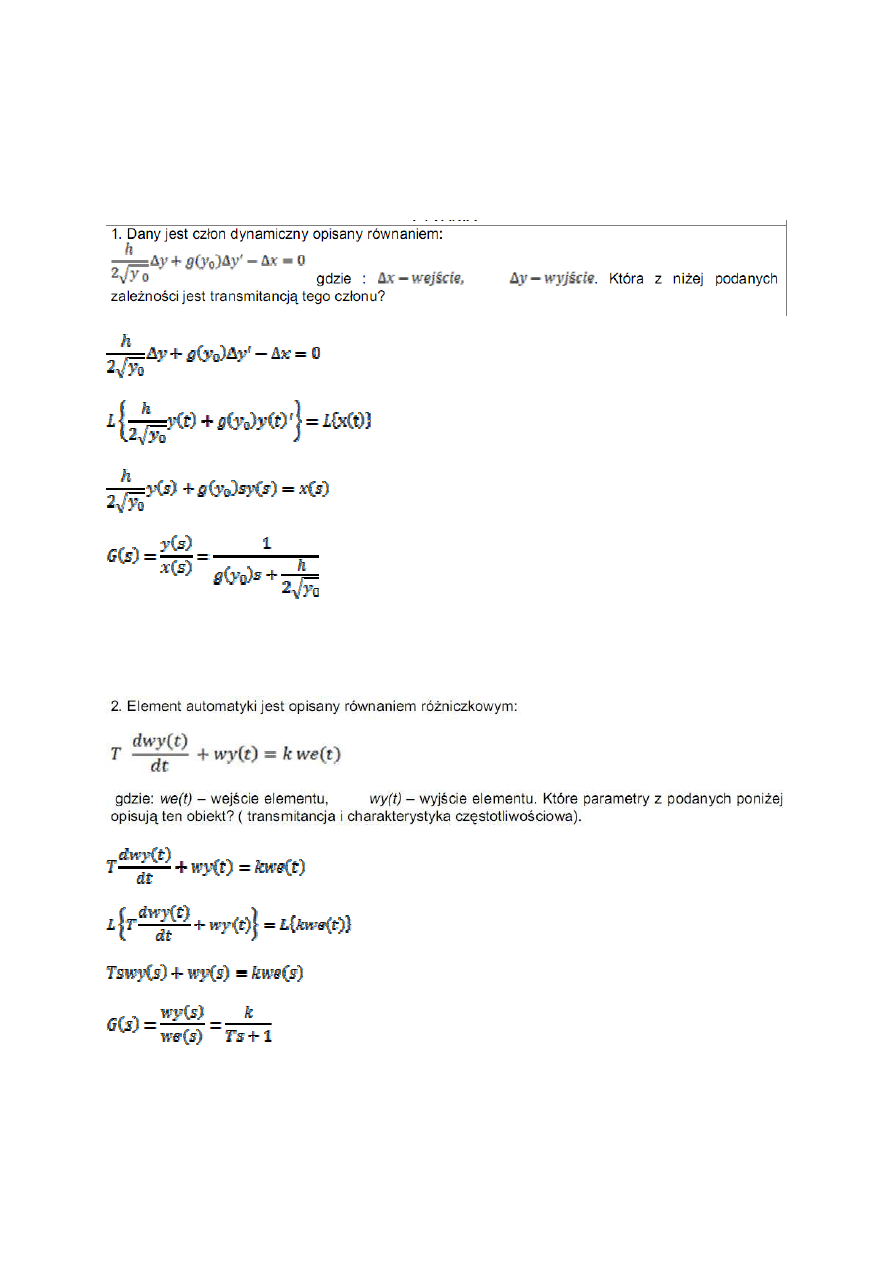
Zad. 1
Zad. 2
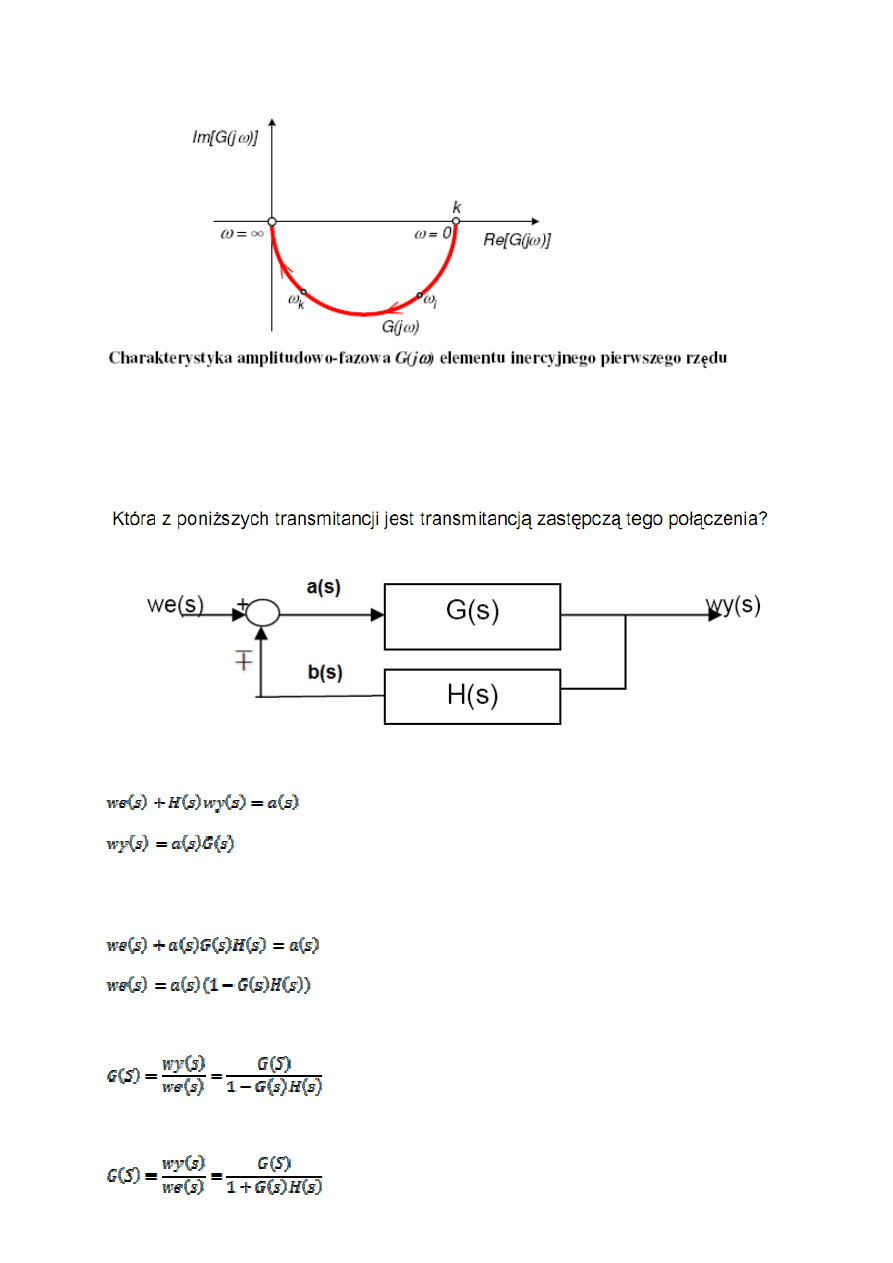
Nie wiem, na ile pytania mogą się różnić, od tego co dostaliśmy, ale możliwe, że dostaniemy tutaj
inne człony dynamiczne.
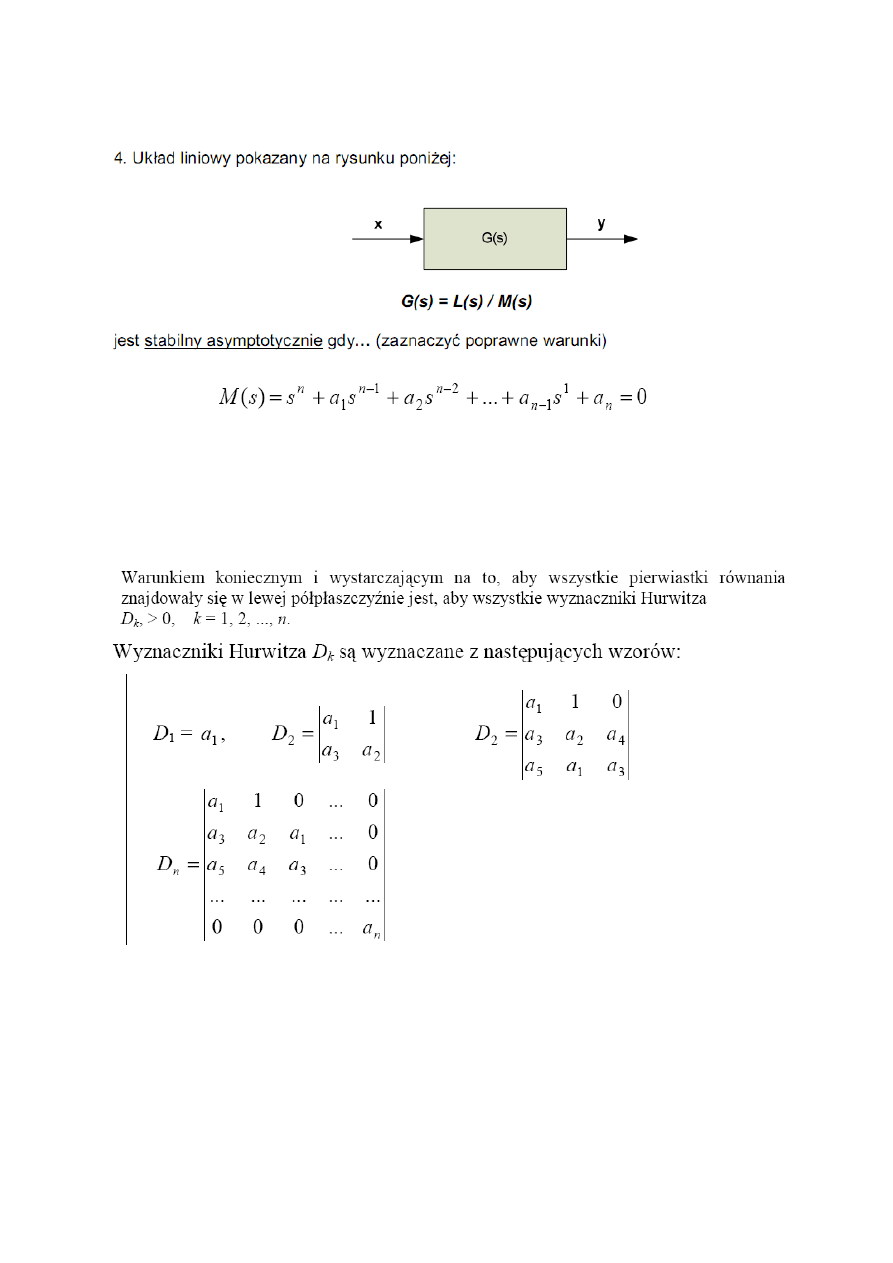
Zad. 3
Wersja dla sprzężenia dodatniego:
Dla sprzężenia ujemnego zmienia się tylko znak w mianowniku:
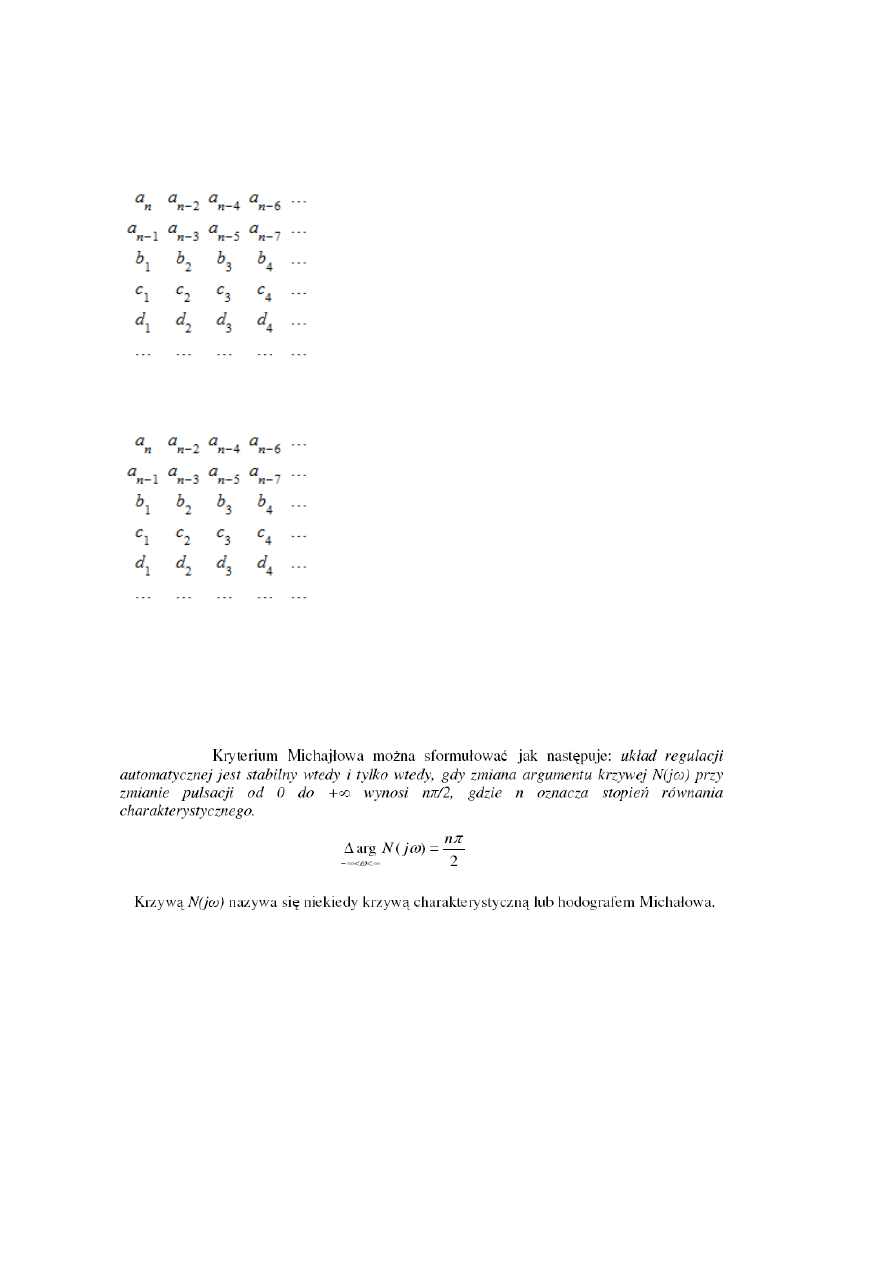
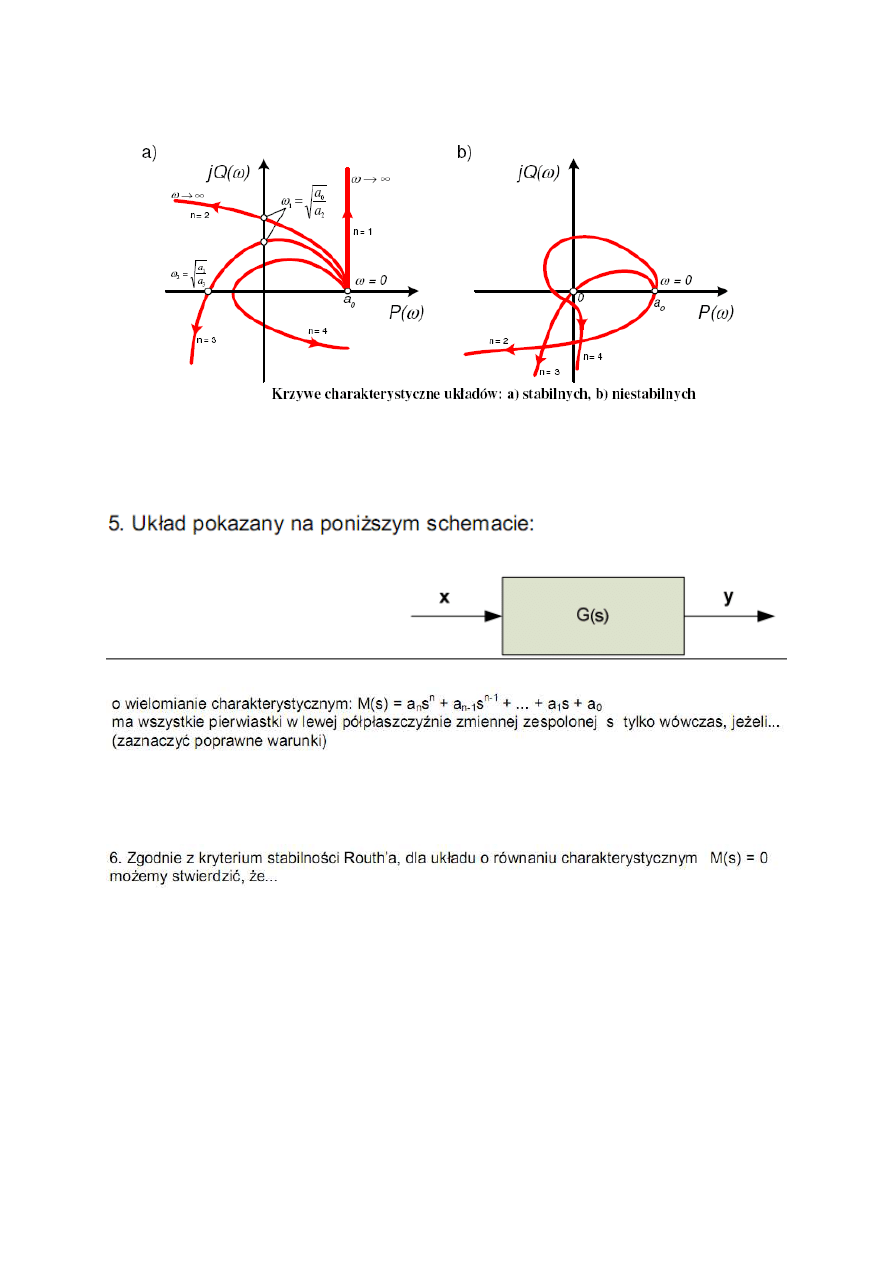
Zad. 4
Dla wielomianu asymptotycznie stabilnego wszystkie pierwiastki leżą w lewej
półpłaszczyźnie zespolonej. W przypadku M(s), może być spełnione jedno z kryteriów
Kryterium Hurwitza:
:
Kryterium Routh’a:
Tablica Routha :
Gdzie
Posiada dokladnie n+1 wierszy (iii) wszystkie elementy pierwszej kolumny są tego samego znaku
Kryterium Michajłowa (określa stabilność) :
Zad. 5
Patrz zad.4 Kryterium Hurwitza i Routh’a
Zad.6
Tablica Routh’a patrz Zad.4
Wszystkie pierwiastki równania charakterystycznego znajdują
się
w lewej pó
ł
p
ł
aszczyźnie(układ jest
asymptotycznie stabilny) jeśli wszystkie elementy pierwszej kolumny tablicy Routha mają
ten sam
znak. Liczba zmian znaków w elementach pierwszej kolumny równa jest liczbie pierwiastków w
prawej pó
ł
p
ł
aszczyźnie.
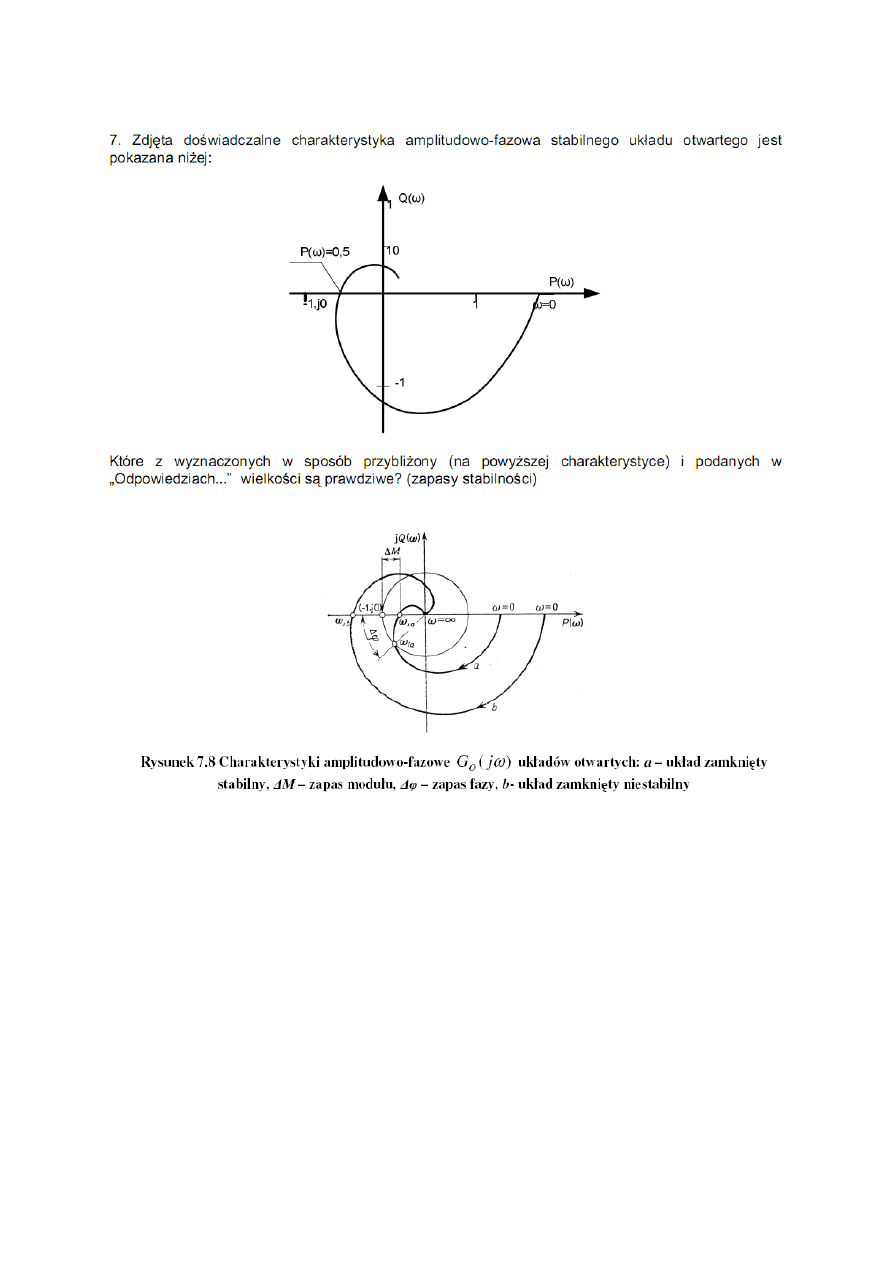
Zad.7
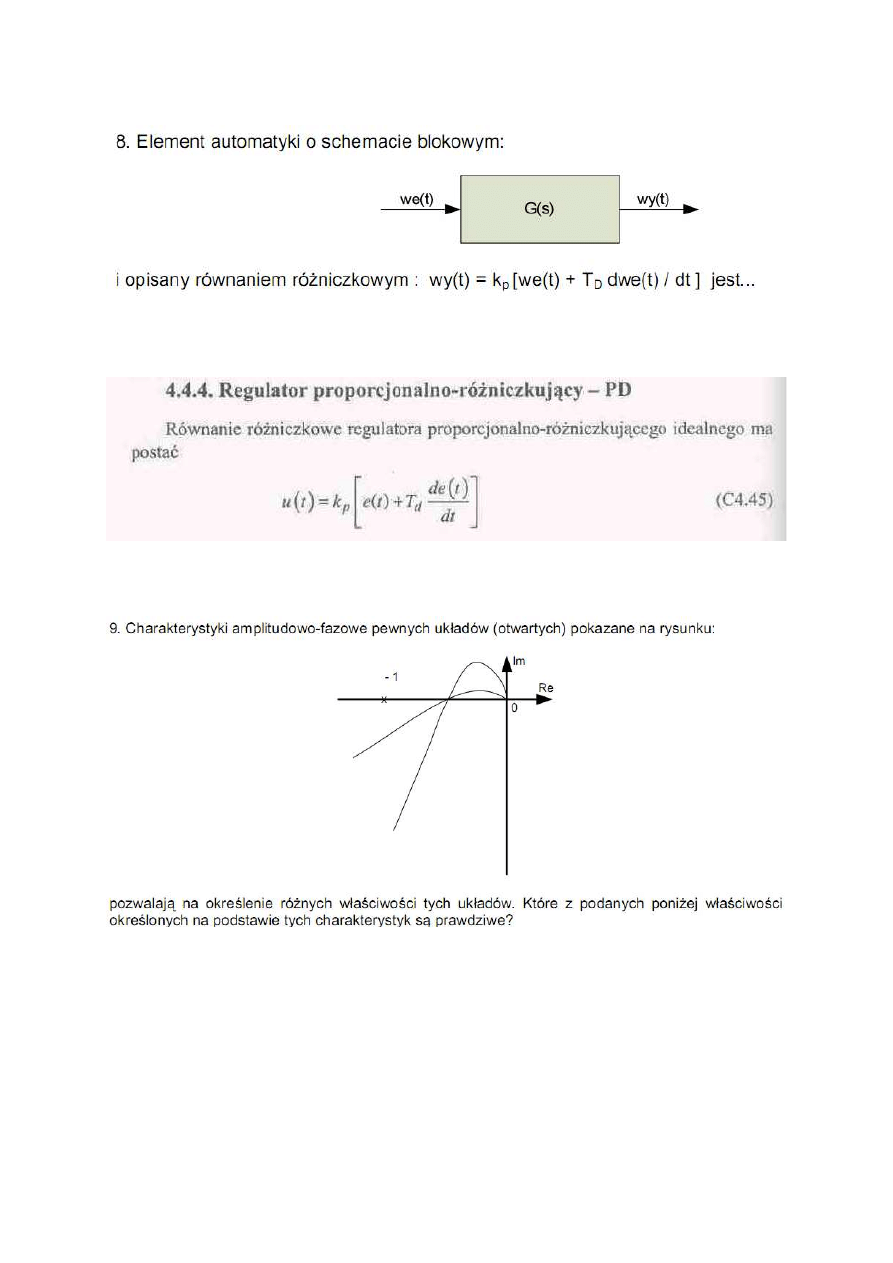
Zad. 8
Regulatorem PD idealnym lub ewentualnie można by to nazwać po prostu członem
proporcjonalno- różniczkującym.
Zad. 9
-Odpowiadające układom otwartym układy zamknięte będą stabilne
-Układy mają ten sam zapas modułu
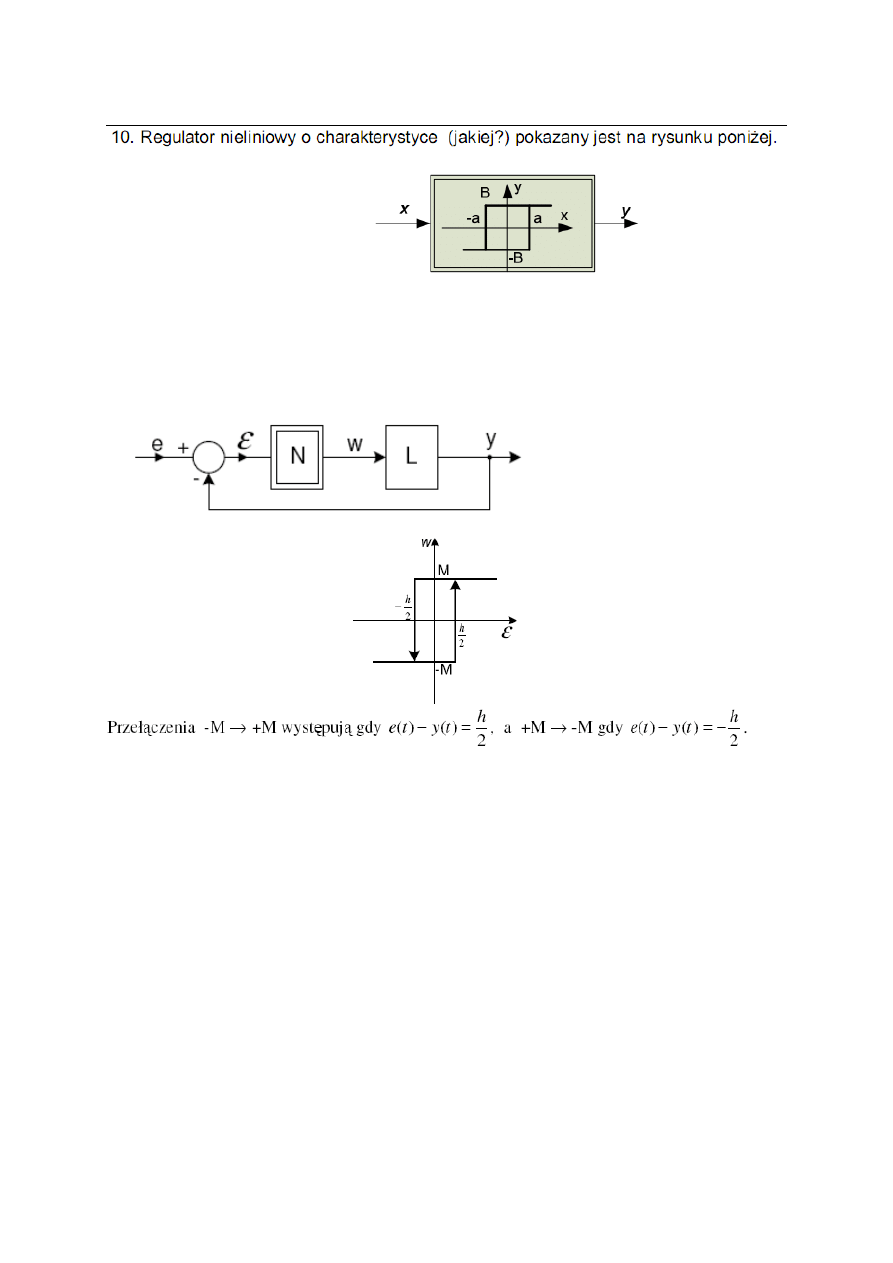
Zad.10
Regulator dwupołożeniowy. Charakterystyka z histerezą.
Histereza zwiększa amplitudę i zmniejsza częstotliwość drgań ustalonych (cyklu
granicznego).
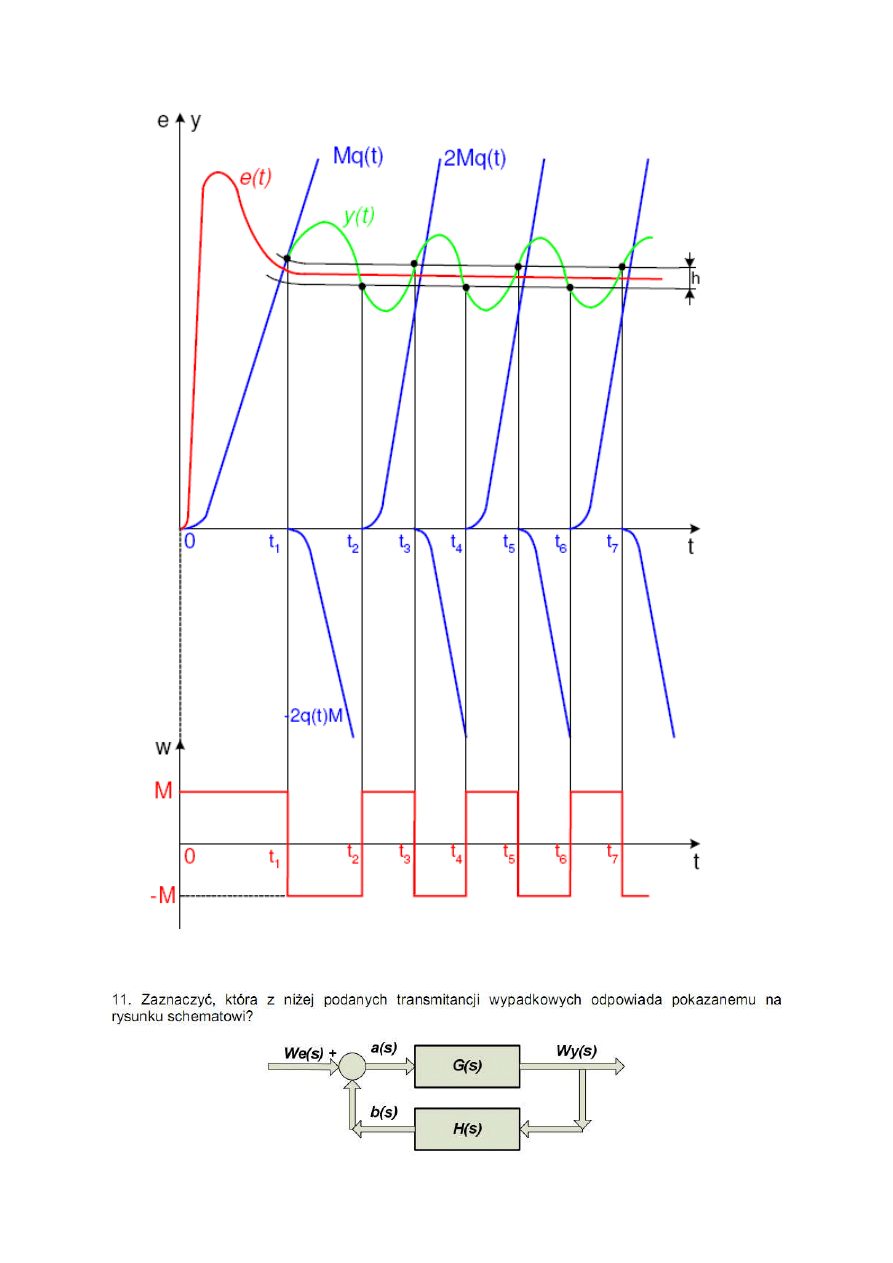
Zad. 11
Analogicznie jak w Zad.3
Wyszukiwarka
Podobne podstrony:
Podstawy automatyki Egzamin 25 I 2011
Podstawy automatyki egzamin
Podstawy automatyki id 366718 Nieznany
Podstawy automatyki egzamin zadania
pytanka na ustny, Automatyka i robotyka air pwr, IV SEMESTR, Podstawy automatyki 2, egzamin
podstawy automatyki Dobor nast Nieznany
Podstawy automatyki Egzamin 25 I 2011
pa 1 a podstawy automatyki egzamin 2008 01 29
Podstawy automatyki (w 1 i 2) p Nieznany
015 podstawy automatyzacji fl N Nieznany (2)
PA egzamin, AGH, Semestr IV, Podstawy automatyki[Ornacki,Pakuła,Łukomski,Snamina], EGZAMIN AUTOMATYK
zadania na egzamin, PWr W9 Energetyka stopień inż, III Semestr, Podstawy automatyki
podstawa EGZAMIN MIKROBIOLOGIA Nieznany
więcej podobnych podstron