PS-1
Wydział Inżynierii Elektrycznej i Komputerowej
Katedra Maszyn Elektrycznych
Laboratorium Maszyn Elektrycznych
Ćwiczenie PS – Silniki komutatorowe prądu stałego
Badania wstępne
Oględziny zewnętrzne badanej maszyny
1. zaznajomienie się z budową badanej maszyny: liczba biegunów głównych i
pomocniczych, liczba szczotek i możliwość przesuwania ich po komutatorze,
możliwość kompensacji oddziaływania twornika, określenie kierunku wirowania
maszyny;
2. rozeznanie sposobu chłodzenia maszyny (chłodzenie naturalne, własne, obce,
wewnętrzne, zewnętrzne, podwójne);
3. sprawdzenie stanu komutatora i szczotek: komutator powinien być gładki, lśniący, nie
porysowany, bez zadziorów i zanieczyszczeń z odpowiednio głęboko wypiłowaną
izolacją międzywycinkowa bez zanieczyszczeń w rowkach; szczotki ustawione
zgodnie z dokumentacją techniczną, prawidłowo i równomiernie dociśnięte do
komutatora nie zakleszczające się w obwodach;
4. rozeznanie tabliczki zaciskowej i oznaczeń poszczególnych zacisków (identyfikacja
poszczególnych uzwojeń);
5. odczyt danych znamionwych badanej maszyny i współpracujących z nią podzespołów.
Pomiar rezystancji izolacji i sprawdzenie ciągłości uzwojeń
Jakość izolacji uzwojeń między poszczególnymi uzwojeniami oraz między tymi uzwojeniami,
a obudową maszyny dokonuje się megaomomierzem (induktorem) 500V.
Sprawdzenie ciągłości uzwojeń można dokonać, mierząc rezystancję poszczególnych
uzwojeń dowolną metodą, lecz nie przekraczając wartości prądów dopuszczalnych.
Najszybszą metodą jest jednak metoda sprawdzenia ciągłości megaomomierzem. Gdy
uzwojenie zachowuje ciągłość, to wskazanie megaomomierza jest bliskie zeru.
Pomiar rezystancji uzwojeń stojana i twornika w temperaturze otoczenia
Rezystancję uzwojenia stojana mierzy się między odpowiednimi zaciskami tabliczki
zaciskowej. Pomiar rezystancji uzwojenia twornika należy wykonać ze szczotkami
podniesionymi lub izolowanymi od komutatora. Jeżeli podniesienie lub izolowanie szczotek
od komutatora sprawia duże trudności, lub nie może być szybko wykonane, to dopuszcza się
pomiar rezystancji uzwojenia twornika ze szczotkami przylegającymi do komutatora.
A
V
R
d
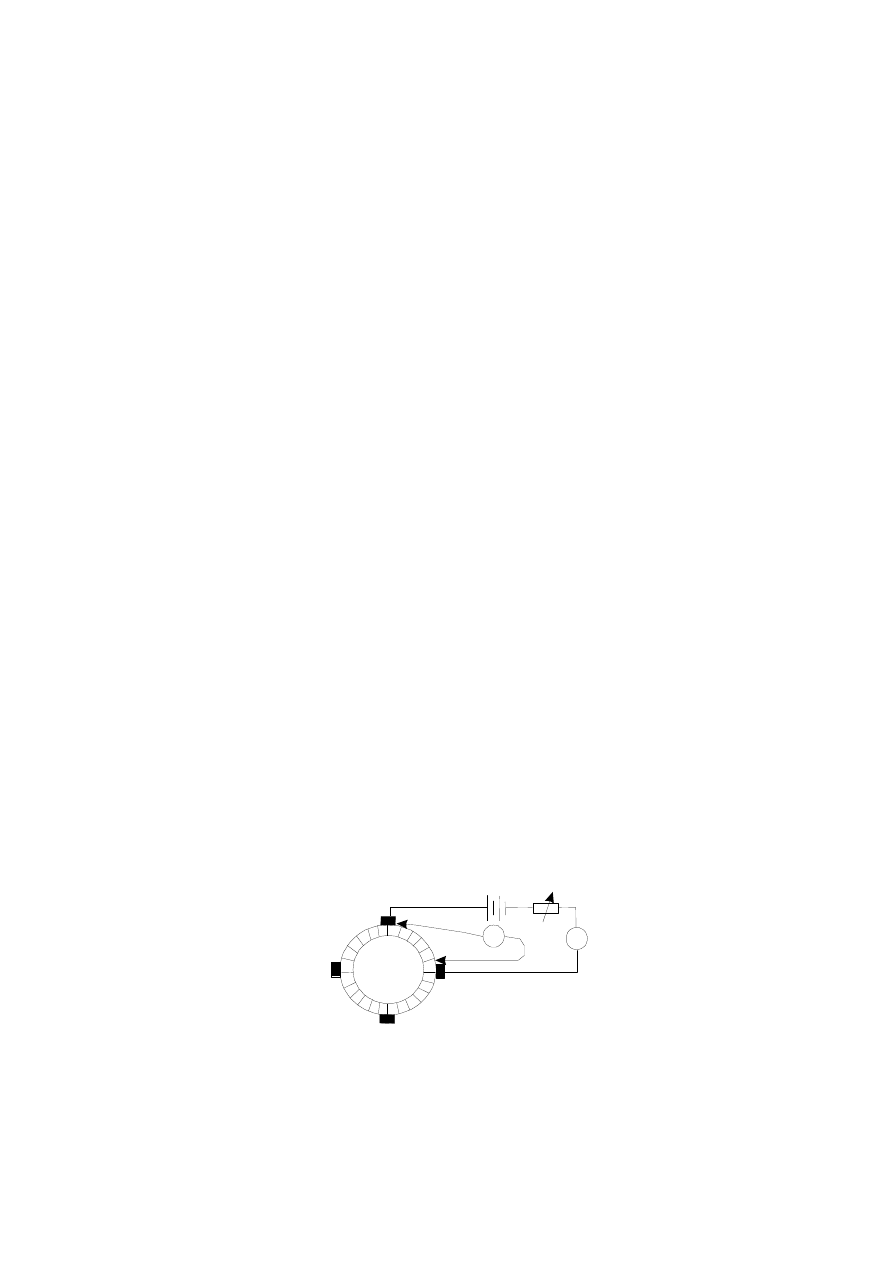
Rys.1. Układ pomiarowy do pomiaru rezystancji uzwojenia twornika
Jeżeli pomiar jest wykonany metodą techniczną, to prąd doprowadza się do twornika za
pośrednictwem szczotek. Woltomierz (miliwoltomierz) łączy się z wycinkami oddalonymi od
siebie o
p
K 2
/
wycinków, znajdującymi się pod szczotkami w pobliżu osi szczotek (gdzie: K
PS-2
– całkowita liczba wycinków komutatora, p – liczba par biegunów). Jeśli
p
K 2
/
będzie
liczbą ułamkową, to wartość tą należy zaokrąglić do liczby całkowitej.
Pomiar należy powtórzyć dla trzech różnych położeń wirnika. Za wartość rezystancji
przyjmuje się średnią arytmetyczną zmierzonych wartości.
Rezystancja przejścia między szczotką a komutatorem
Rezystancja przejścia między szczotką a komutatorem zależy od wartości prądu.Szacunkowo
przyjmuje się, że spadek napięcia na rezystancji dla jednej szczotki w warunkach
znamionowych wynosi dla szczotek węglowo–grafitowych ∆U
sz
≅
1V, dla szczotek węglowo–
metalowych ∆U
sz
≅
0,3V.
a
I
aN
I
25
,
0
aN
I
sz
U
∆
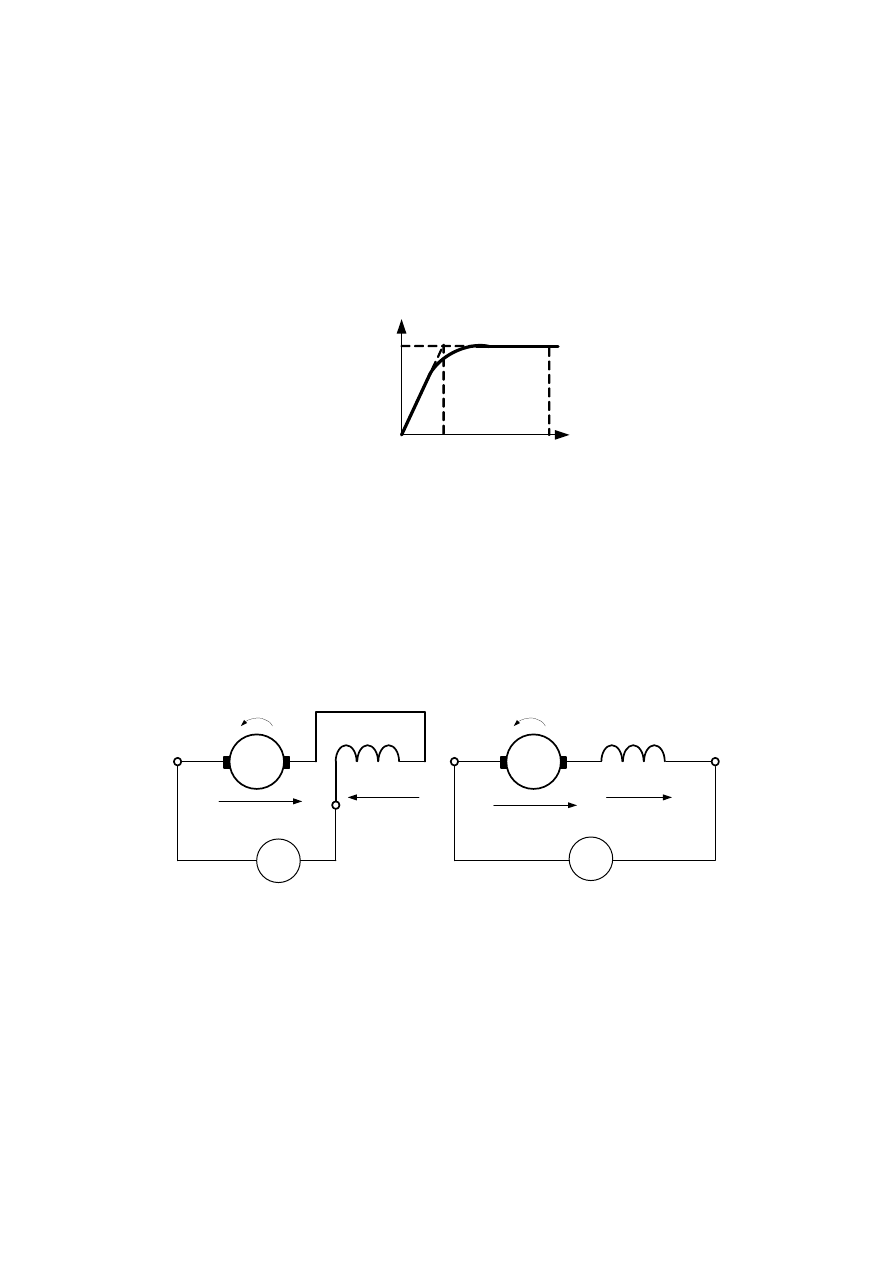
Rys.2. Zależność spadku napięcia na rezystancji przejścia między szczotką a komutatorem
od prądu wirnika
Oznaczenie początków i końców uzwojeń
Prawidłowe oznaczenie początków i końców uzwojeń określa się wg kierunku wirowania
i kierunku przepływu prądu w uzwojeniach maszyny prądu stałego.
Oznaczenie zacisków uzwojenia biegunów komutacyjnych
Zaciski biegunów komutacyjnych są tak oznaczone (B1-B2), aby prąd płynący przez
szeregowo połączony wirnik i uzwojenie biegunów komutacyjnych dawał przeciwne
amperozwoje.
V
a)
b)
Ω
Ω
B1 B2
A1
A2
A1
A2
B2 B1
Φ
a
Φ
a
Φ
Φ
bp
bp
V
V
Rys.3. Połączenie biegunów komutacyjnych z twornikiem: a) prawidłowe, b) nieprawidłowe
Zasilając niskim napięciem przemiennym szeregowo połączone uzwojenia wirnika
i biegunów pomocniczych, mierzy się przy tym samym prądzie spadek napięcia na
impedancji wypadkowej uzwojeń.
Przy połączeniu prawidłowym (przeciwdziałanie strumieni) impedancja będzie mniejsza.
Ten sam efekt ujemnego sprzężenia magnetycznego przy połączeniu prawidłowym uzyskuje
się, zasilając jedno z uzwojeń impulsowo przerywanym napięciem stałym. Wtedy w drugim
uzwojeniu wyindukuje się napięcie o odpowiedniej biegunowości.
Oznaczenie zacisków uzwojenia wzbudzenia bocznikowego
Oznaczenie końców uzwojenia bocznikowego można łatwo sprawdzić, łącząc je dowolnie do
zacisków A1 i B2 (przy pracy silnikowej maszyny). Jeżeli silnik obraca się w prawo to zacisk
PS-3
połączony z A1 oznacza się jako E1 a drugi - E2. Przy obrocie w lewo oznaczenia są
odwrotne. Przy pracy prądnicowej prądnicy bocznikowej i obrocie maszyny w prawo zaciski,
na których indukuje się napięcie dodatnie, oznacza się A1 i E1, a pozostałe B2 i E2.
Oznaczenie zacisków uzwojenia wzbudzenia szeregowego
Przy oznaczaniu zacisków uzwojenia wzbudzenia szeregowego D1-D2 silniku bocznikowo -
szeregowym albo w prądnicy bocznikowo–szeregowej zwieramy to uzwojenie w czasie pracy
maszyny. Jeżeli przy zwarciu prędkość silnika rośnie, a w prądnicy napięcie maleje, wówczas
uzwojenia E1, E2 i D1, D2 dają strumienie wzbudzenia zgodne. Uzwojenie D1, D2 można
zasilać również z obcego źródła zasilania. W silniku szeregowym postępuje się analogicznie,
łącząc dowolnie uzwojenie wzbudzenia szeregowo z zaciskiem B2. Jeżeli silnik obraca się w
prawo, to zacisk uzwojenia wzbudzenia połączonego z zaciskiem B2 oznacza się przez D1, a
drugi przez D2.
Początki i końce uzwojeń można również wyznaczyć metodą impulsów prądu stałego. W
chwili załączenia do jednego uzwojenia prądu, płynącego zgodnie z kolejnością wskaźników
cyfrowych, potencjały dodatnie napięć wyindukowanych w pozostałych uzwojeniach
wskazują na ”2” (koniec uzwojenia) oznaczenia danego uzwojenia , a ujemne na ”1”
(początek uzwojenia).
Program podstawowy ćwiczenia
Silnik bocznikowy prądu stałego
Obiektem badań jest silnik bocznikowy prądu stałego, pracujący również z dozwojeniem
szeregowym.
1. Zapoznanie się z budową silnika, zestawienie danych znamionowych oraz rezystancji
uzwojeń.
aN
U
=230V,
tN
I
=15,2A,
fN
I
=0,73A,
N
n
=1450/min,
fN
tN
N
I
I
I
+
=
,
sumaryczna rezystancja twornika i biegunów komutacyjnych -
a
R
=0,8
Ω
,
rezystancja dozwojenia szeregowego -
s
R
=0,07
Ω
.
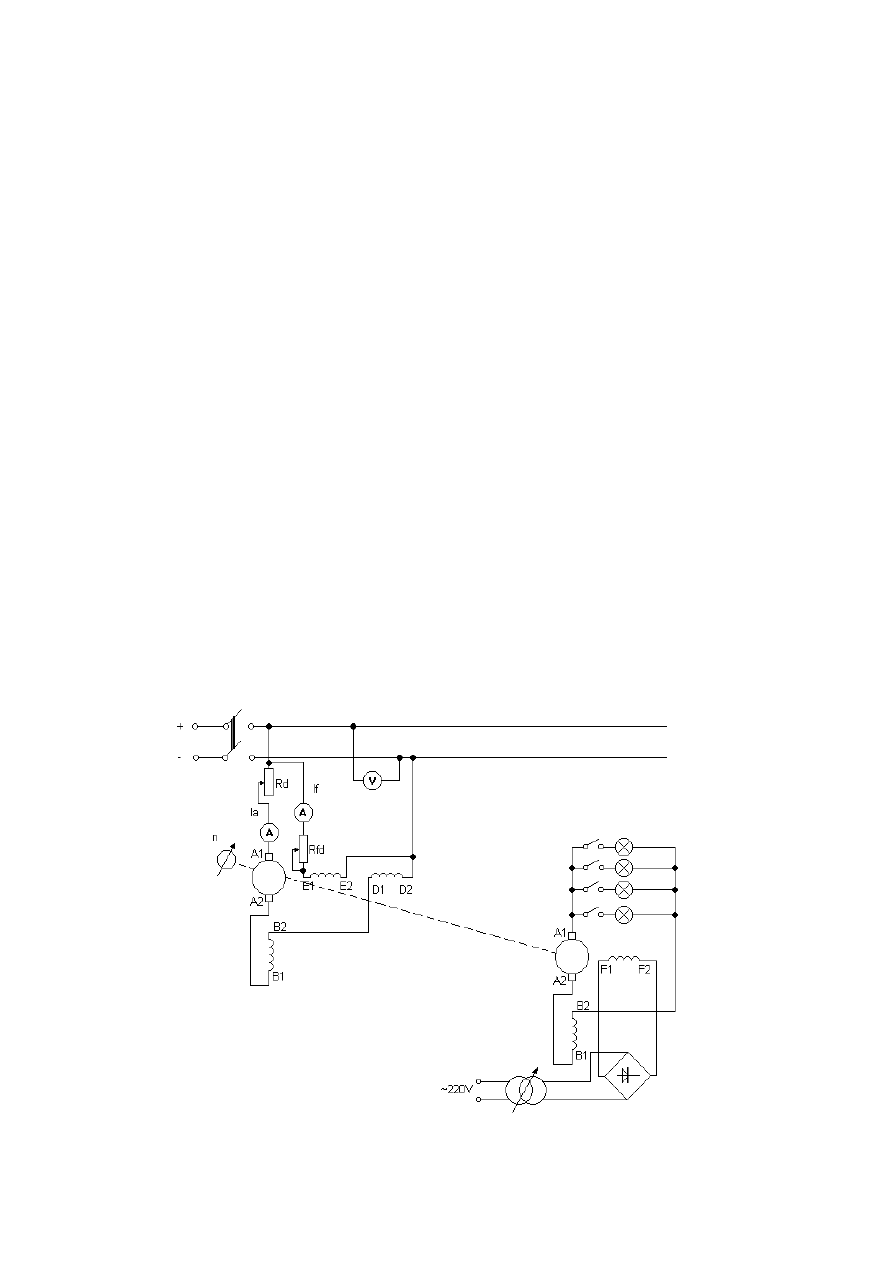
Rys.4. Schemat układu pomiarowego dla silnika bocznikowego z dozwojeniem szeregowym
PS-4
Schemat układu pomiarowego do badania silnika bocznikowego z dozwojeniem szeregowym
zgodnym, przedstawia rys.4. Silnik jest zasilany napięciem stałym z oddzielnego stanowiska
„silnik asynchroniczny pierścieniowy - prądnica obcowzbudna prądu stałego”. Badany silnik
jest sprzęgnięty z obcowzbudną prądnicą prądu stałego. Regulując prąd wzbudzenia prądnicy
zmieniamy jej obciążenie (moc wydzielaną w grzałkach), a tym samym obciążenie silnika.
Obroty silnika mierzymy z pomocą tachoprądnicy. Moment silnika wyznaczamy metodą
bezpośrednią, poprzez odczyt przeskalowanego wskazania wagi, na którą naciskają łapy
ruchomego stojana prądnicy obciążającej.
2. Wykonanie rozruchu oporowego nieobciążonego silnika.
•
Rezystor rozruchowy (rozrusznik)
d
R
ustawić na wartość maksymalną.
•
Rezystorem
fd
R
ustawić znamionową wartość prądu wzbudzenia.
•
Włączyć napięcie zasilające, ustawione na wartość znamionową
aN
U
i stopniowo
zmniejszać rezystancję rozrusznika
d
R
do zera. (Prędkość obrotowa wzrasta, aż do
osiągnięcia wartości ustalonej).
•
Rezystorem
fd
R
ustawić żądaną wartość prądu wzbudzenia, a tym samym obrotów.
3. Wyznaczenie charakterystyk pracy obciążonego silnika.
•
silnik bocznikowy bez dozwojenia szeregowego
•
silnik bocznikowy z dozwojeniem szeregowym zgodnym
Dla obu układów połączeń, wykonujemy pomiary dla następujących wartości zasilania i
rezystancji silnika:
a)
a
U
=
aN
U
=230V,
f
I
=
fN
I
=0,73A,
d
R
=0
b)
a
U
=
aN
U
=230V,
f
I
=
fN
I
=0,73A,
d
R
>0 (ustalić wartość tej rezystancji, np.
Ω
5
)
c)
a
U =
aN
U
=230
V,
f
I = 0,6A,
d
R =0
d)
a
U =200V,
f
I =
fN
I
=0,73
A,
d
R =0
Zmieniając wartość prądu wzbudzenia prądnicy, odczytujemy prąd twornika
a
I , obroty
silnika
n
i moment obrotowy
T . Wyniki pomiarów zapisujemy w tabeli, w której
wyróżniono również wielkości obliczane na etapie opracowania sprawozdania.
Pomiary należy wykonać obciążając silnik prądem znamionowym twornika
aN
I
, a następnie
zmniejszając obciążenie od prądu znamionowego do prądu biegu jałowego.
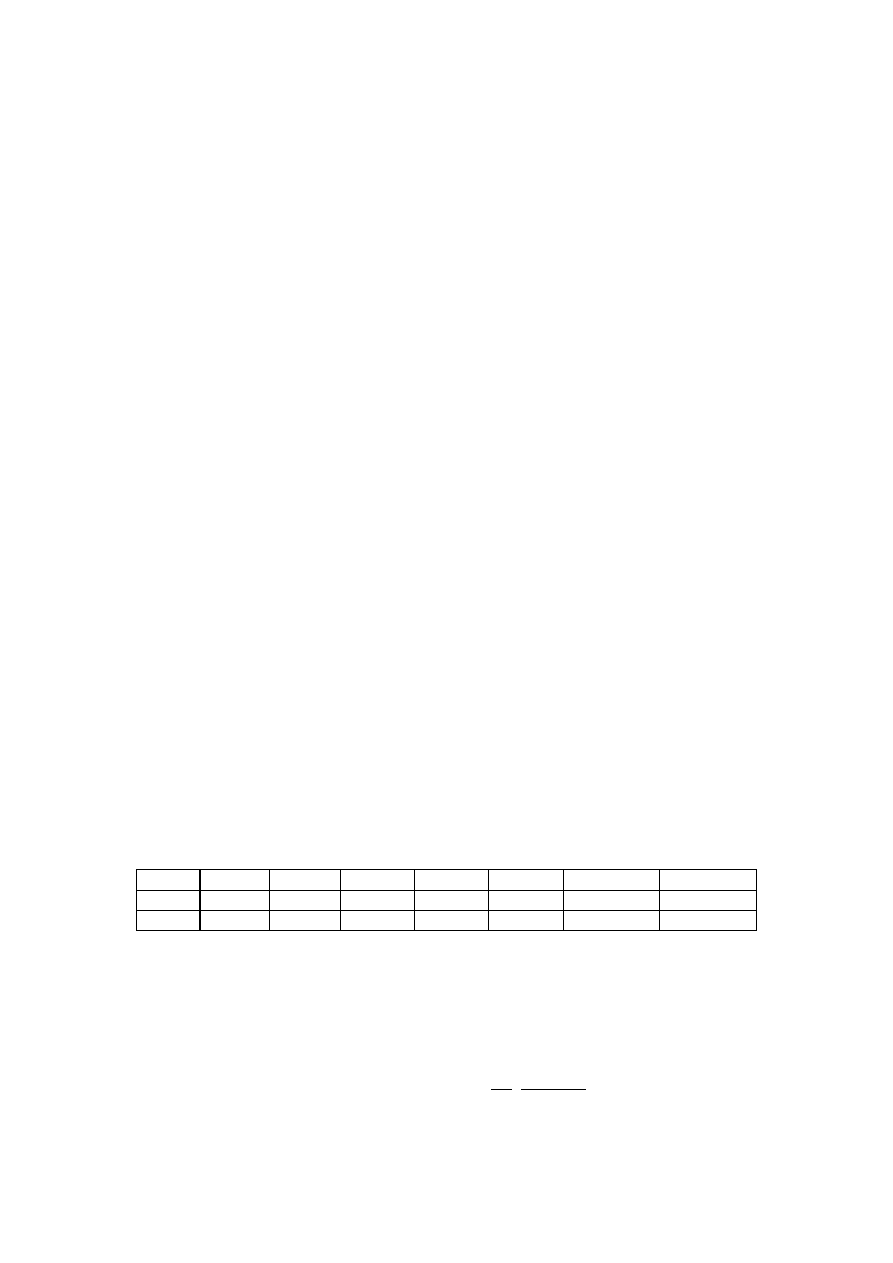
Przykładowa tabela pomiarowa:
I [A]
n [min
-1
]
P
1
[W]
T [Nm]
P
2
[W]
η
[%]
C
E
Φ
[Nm/A]
T
obl
[Nm]
gdzie:
E
C
– stała konstrukcyjna maszyny,
Φ
- strumień wzbudzenia, formuły na moce
1
P
i
2
P
są podane w punkcie 4.
Przeprowadzone w ćwiczeniu badania służą ocenie zgodności wyznaczonych pomiarowo
charakterystyk pracy silnika w stanie ustalonym z charakterystykami otrzymanymi ze
wzorów, wyprowadzonych na podstawie analizy uproszczonych modeli obwodowych
maszyny. W tym celu dla danej prędkości wirnika porównujemy wartość momentu:
zmierzoną i obliczoną z kolejnych formuł:
n
RI
U
C
a
a
E
−
⋅
=
Φ
π
30
, stąd
a
E
obl
I
C
T
⋅
Φ
=
, przy
czym dla silnika bez dozwojenia -
d
a
R
R
R
+
=
, a z dozwojeniem -
d
s
a
R
R
R
R
+
+
=
.
PS-5
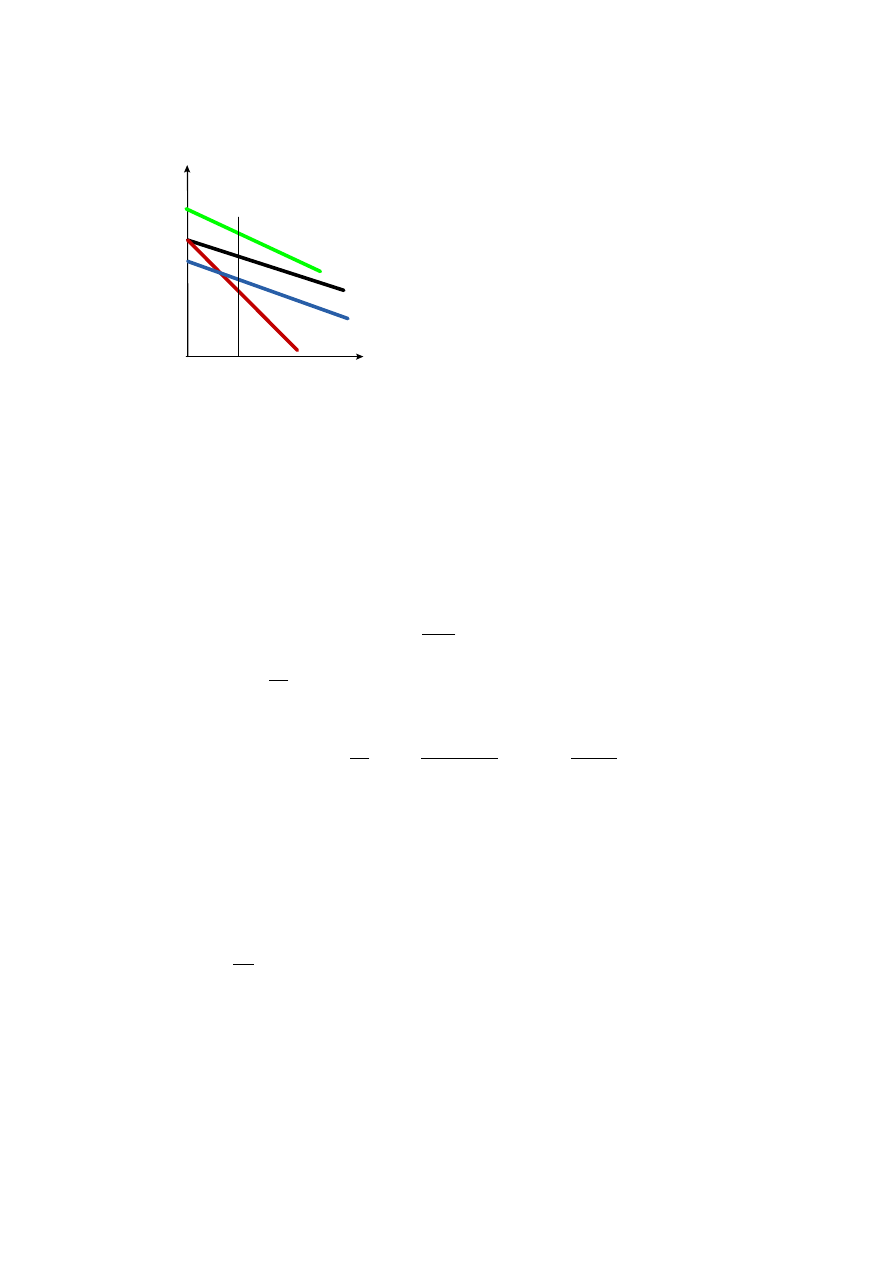
Przykładowe przebiegi charakterystyk mechanicznych silnika bocznikowego bez dozwojenia
szeregowego przedstawione są poniżej:
2
3
1
4
n
a
I
0
n
01
n
aN
I
0
Rys.5. Przykładowe przebiegi charakterystyk
zewnętrznych silnika bocznikowego:
1 – naturalna, 2 - z oporem dodatkowym w
tworniku i znamionowym napięciu zasilania,
3 - przy obniżonym napięciu zasilania
i znamionowym wzbudzeniu,
4 - ze zmniejszonym prądem wzbudzenia
i znamionowym napięciu zasilania
4. Sprawność silnika.
Z racji budowy i zasady działania silnik prądu stałego ma stosunkowo małą znamionową
sprawność przetwarzania mocy, na poziomie ok.85%. Wyróżniamy metody wyznaczania
sprawności.
•
Metoda bezpośredniego obciążenia
Należy zmierzyć moc
1
P
pobraną przez silnik i moc
2
P
oddaną na wale silnika.
Dla silnika:
- obcowzbudnego -
f
f
a
a
I
U
I
U
P
⋅
+
⋅
=
1
,
- bocznikowego -
UI
I
I
U
P
f
a
=
+
=
)
(
1
,
Moc oddana mechaniczna:
30
2
n
T
T
P
⋅
⋅
=
Ω
⋅
=
π
,
stąd: sprawność
100
1
2
⋅
=
P
P
η
.
•
Metoda strat poszczególnych
100
1
100
100
1
1
1
1
2
⋅
∆
−
=
⋅
∆
−
=
⋅
=
∑
∑
P
P
P
P
P
P
P
η
gdzie:
d
sz
m
Fe
wf
wa
P
P
P
P
P
P
P
∆
+
∆
+
∆
+
∆
+
∆
+
∆
=
∆
∑
2
)
(
a
d
a
wa
I
R
R
P
+
=
∆
– straty w uzwojeniach wirnika i uzwojeniach szeregowych,
2
)
(
f
fd
f
wf
I
R
R
P
+
=
∆
– straty w uzwojeniu wzbudzenia silnika obcowzbudnego lub
bocznikowego,
a
sz
sz
I
U
P
⋅
∆
=
∆
– straty na szczotkach (zwykle pomijane),
2
)
(
01
.
0
N
N
d
I
I
P
P
⋅
⋅
=
∆
– straty obciążeniowe dodatkowe maszyn bez uzwojeń
kompensacyjnych,
0
P
P
P
m
Fe
∆
=
∆
+
∆
- straty jałowe (w obwodzie magnetycznym i mechaniczne).
Straty jałowe wyznacza się przy pracy silnika na biegu jałowym. Zmieniamy napięcie
twornika i utrzymujemy stałe obroty przez zmianę prądu wzbudzenia. Następnie dokonujemy
rozdziału strat na
Fe
P
∆
i
m
P
∆
, przez wykreślenie ich sumy w funkcji kwadratu napięcia
twornika. Otrzymana prosta, w przecięciu z osią rzednych, wyznaczy przybliżoną wartość
strat mechanicznych.

PS-6
5. Opracowanie sprawozdania
W sprawozdaniu należy:
•
Przedstawić program ćwiczenia, schemat układu pomiarowego, tabele wyników
pomiarów;
•
Dla każdego punktu charakterystyki mechanicznej obliczyć moc pobieraną z sieci -
1
P
, moc użyteczną
2
P
oraz sprawność silnika
η
, w tym jej wartość znamionową.
•
Obliczyć moc użyteczną znamionową
N
P dla znamionowego prądu zasilania -
fN
aN
N
I
I
I
+
=
;
•
Narysować w jednym układzie współrzędnych i porównać przebiegi zmierzonych
charakterystyk zewnętrznych -
)
(
a
I
f
n
=
, dla analizowanych przypadków zasilania
i konfiguracji wzbudzenia silnika;
•
Narysować w jednym układzie współrzędnych i porównać przebiegi charakterystyk
mechanicznych -
)
(T
f
n
=
, zmierzonych i obliczonych według podanej procedury.
Ocenić zbieżność wyników;
•
Dla każdej z charakterystyk mechanicznych obliczyć (przy znamionowych obrotach)
zmienność prędkości obrotowej
%
100
0
0
⋅
−
=
n
n
n
n
N
N
δ
, gdzie: n
0
- prędkość biegu
jałowego,
N
n
- prędkość przy prądzie znamionowym;
•
Obliczyć sprawność znamionową silnika:
%
100
⋅
Ω
=
N
N
N
N
N
I
U
T
η
, gdzie:
30
π
n
=
Ω
,
wartości prędkości i momentu mierzymy przy prądzie znamionowym;
•
Przedstawić wnioski.
Silnik szeregowy prądu stałego
1. Zapoznanie się z budową silnika, zestawienie danych znamionowych oraz rezystancji
uzwojeń.
N
U = [V],
N
I = [A],
N
n = [min
-1
],
sumaryczna rezystancja twornika i biegunów komutacyjnych -
a
R = 0,254
Ω
,
rezystancja uzwojenia wzbudzenia szeregowego -
f
R = 0,054
Ω
,
rezystancja dodatkowa łączona szeregowo z uzwojeniem twornika -
d
R = 0,78
Ω
,
rezystancja dodatkowa bocznikująca uzwojenie wzbudzenia -
b
R
= 0,184
Ω
.
2. Rozruch napięciowy silnika.
Połączyć układ według schematu przedstawionego na rys.6.
Tak połączony silnik będzie wirował w prawo (patrząc od strony sprzęgła). Zmianę kierunku
wirowania uzyskuje się przez przełączenie zacisków A1-B2 względem zacisków D1-D2.
Zwiększając stopniowo napięcie zasilania przy pomocy regulatora indukcyjnego TRN
przeprowadzić rozruch napięciowy silnika zwiększając jednocześnie przy pomocy
autotransformatora Atr prąd wzbudzenia prądnicy obciążającej badany silnik (uwaga: silnik
szeregowy może się rozbiegać, przy braku obciążenia). Ustawić zadaną wartość napięcia
zasilania.
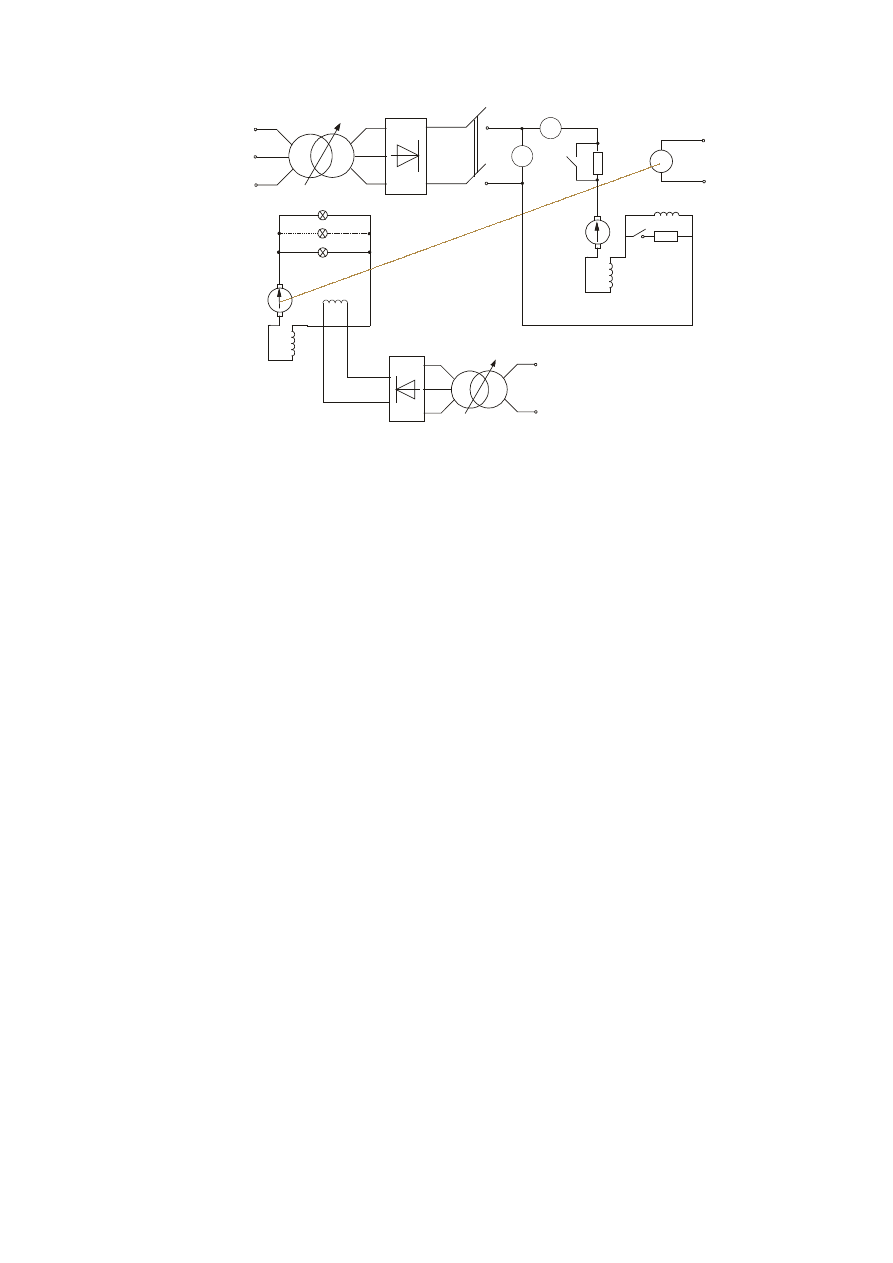
PS-7
Rd
A1
A2
B2
D1
D2
SILNIK BADANY
PR
Ą
DNICA OBCI
Ąś
ENIOWA
A1
A2
B1
B2
F1
F2
TRN
B2
W3 Rb
N
TG
3
x
2
2
0
V
W 1
V
A
W 2
~220V
Atr
Rys.6. Układ do wyznaczania charakterystyk pracy silnika szeregowego
3. Pomiar charakterystyk zewnętrznych (mechanicznych) -
)
(I
f
n
=
lub
)
(T
f
n
=
.
Charakterystyka mechaniczna jest to zależność prędkości kątowej
Ω
lub obrotowej
n
od
momentu obciążenia T , przy stałej wartości napięcia zasilania twornika U =const,
wyznaczona dla stałych wartości rezystancji maszyny. Własności ruchowe maszyny dobrze
ilustruje łatwiejsza do uzyskania pomiarowo charakterystyka zewnętrzna -
)
(I
f
=
Ω
lub
)
(I
f
n
=
, lecz należy pamiętać, że dla silnika prądu stałego o wzbudzeniu szeregowym
moment elektromagnetyczny jest proporcjonalny do kwadratu prądu.
Pomiaru momentu obciążenia silnika dokonujemy za pomocą sprzęgniętej mechanicznie z
badanym silnikiem prądnicy prądu stałego z wahliwym stojanem. W miarę wzrostu
obciążenia prądnicy, a tym samym silnika (przez zmniejszenie rezystancji grzałek przy stałym
wzbudzeniu lub zwiększenie prądu wzbudzenia prądnicy przy stałej wartości rezystancji
obciążenia) stojan prądnicy naciska na wagę, której wskazanie jest proporcjonalne do
momentu obciążenia. W uproszczeniu przyjmujemy, że moment ten jest równy momentowi
wytwarzanemu przez silnik.
Zmieniając wartość prądu wzbudzenia prądnicy, odczytujemy prąd twornika I , obroty silnika
n
i moment T . Układ obciążenia i pomiar prędkości taki sam, jak przy badaniu silnika
bocznikowego.
Pomiary należy wykonać obciążając silnik prądem twornika ok.45A, a następnie zmniejszać
prąd do wartości, przy której obroty zbliżą się do wartości ok. 2100/min. (Ograniczenie
uzasadnia wytrzymałość mechaniczna prądnicy obciążającej badany silnik, ma ona obroty
znamionowe równe 1500/min). W trakcie pomiarów należy utrzymywać stałą wartość
napięcia zasilania silnika, które znacznie zmienia się ze zmianą obciążenia (regulator
indukcyjny ma zbyt małą moc).
Pomiary wykonujemy dla czterech przypadków zasilania i rezystancji silnika:
a) U =50V,
d
R
=0, bocznikowanie wzbudzenia i rezystancja dodatkowa odłączone;
b) U =70V,
d
R
=0, bocznikowanie wzbudzenia i rezystancja dodatkowa odłączone;
c) U =70V,
d
R
=0,78
Ω
, bocznikowanie wzbudzenia odłączone;
d) U =50V,
d
R
=0,
b
R
= 0,184
Ω
.
PS-8
Pomiary dla każdego z przypadków rozpoczynamy od rozruchu napięciowego silnika,
ustawiając przedtem wyłączniki W2 i W3 (rys.6) w odpowiednich pozycjach.
Wyniki pomiarów dla danego przypadku zapisujemy w tabeli, jak poniżej, w której
wyróżniono również wielkości obliczane na etapie opracowania sprawozdania.
I [A]
n [min
-1
]
P
1
[W]
T [Nm]
P
2
[W]
η
[%]
C
E
Φ
[Nm/A]
T
obl
[Nm]
gdzie:
E
C
– stała konstrukcyjna maszyny,
Φ
- strumień wzbudzenia.
I
U
P
⋅
=
1
,
T
n
P
⋅
⋅
=
30
2
π
,
%
100
1
2
⋅
=
P
P
η
,
n
RI
U
C
E
−
⋅
=
Φ
π
30
,
przy czym dla przypadków: a) i b) -
f
a
R
R
R
+
=
, dla przypadku c) -
d
f
a
R
R
R
R
+
+
=
,
dla przypadku d) -
b
f
b
f
a
R
R
R
R
R
R
+
+
=
,
I
C
T
E
obl
⋅
Φ
=
.
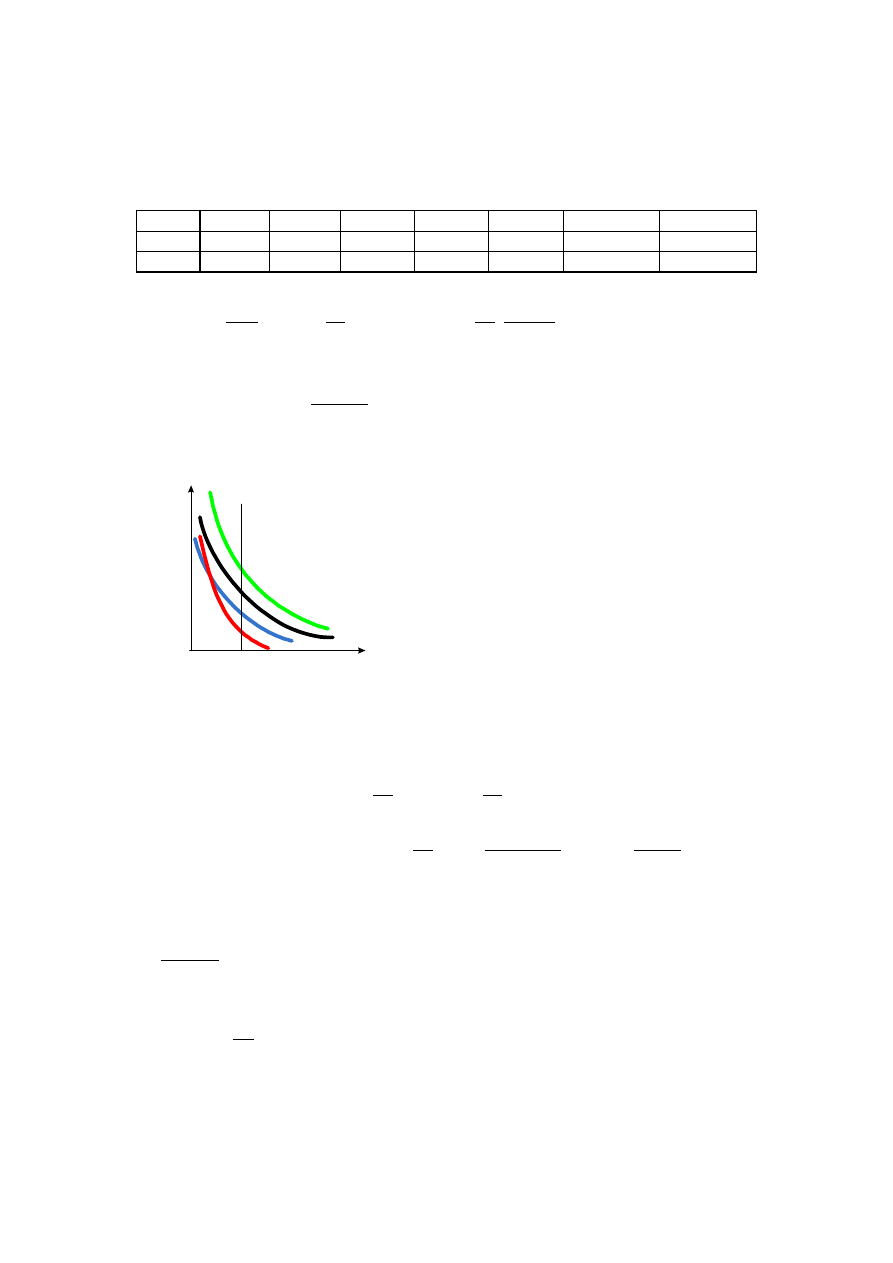
Przykładowe przebiegi charakterystyk zewnętrznych silnika szeregowego przedstawione są
poniżej.
2 3
1
4
I
n
N
I
0
Rys.7. Przebiegi charakterystyk
zewnętrznych silnika szeregowego:
1 - naturalna,
2 - z oporem dodatkowym,
3 - przy obniżonym napięciu ,
4 - ze zbocznikowanym uzwojeniem
wzbudzenia
4. Sprawność silnika
•
Metoda bezpośredniego obciążenia
Należy zmierzyć moc
1
P
pobraną przez silnik i moc
2
P
oddaną na wale silnika.
I
U
P
⋅
=
1
,
30
2
n
T
T
P
π
=
Ω
⋅
=
, stąd
100
1
2
⋅
=
P
P
η
.
•
Metoda strat poszczególnych
100
1
100
100
1
1
1
1
2
⋅
∆
−
=
⋅
∆
−
=
⋅
=
∑
∑
P
P
P
P
P
P
P
η
d
sz
m
Fe
wf
wa
P
P
P
P
P
P
P
∆
+
∆
+
∆
+
∆
+
∆
+
∆
=
∆
∑
2
)
(
I
R
R
P
d
a
wa
+
=
∆
– straty w uzwojeniach wirnika i uzwojeniach szeregowych,
2
I
R
R
R
R
P
b
f
b
f
wf
⋅
+
=
∆
– straty w uzwojeniu wzbudzenia,
I
U
P
sz
sz
⋅
∆
=
∆
– straty na szczotkach (zwykle pomijane),
2
)
(
01
.
0
N
N
d
I
I
P
P
⋅
⋅
=
∆
– straty obciążeniowe dodatkowe,
0
P
P
P
m
Fe
∆
=
∆
+
∆
– straty jałowe (w obwodzie magnetycznym i mechaniczne) wyznacza się
sposobem silnikowym, a następnie dokonuje się ich rozdziału na
Fe
P
∆
i
m
P
∆
(jak dla silnika bocznikowego).

PS-9
5. Opracowanie sprawozdania
W sprawozdaniu należy:
•
Przedstawić program ćwiczenia, schemat układu pomiarowego, tabele wyników
pomiarów;
•
Dla każdego punktu charakterystyki mechanicznej obliczyć: moc pobieraną z sieci -
1
P
, moc użyteczną oddawaną przez silnik -
2
P
, sprawność silnika
η
;
•
Narysować w jednym układzie współrzędnych i porównać przebiegi zmierzonych
charakterystyk zewnętrznych -
)
(I
f
n
=
, dla analizowanych przypadków zasilania
i konfiguracji rezystancji silnika.
•
Narysować w jednym układzie współrzędnych i porównać przebiegi charakterystyk
mechanicznych -
)
(T
f
n
=
, zmierzonych i obliczonych według podanej procedury.
Ocenić zbieżność wyników;
•
Przedstawić wnioski.
Literatura podstawowa:
1. J.K. Markielowski i in.: Laboratorium maszyn elektrycznych, PK, Kraków 1982
2. J. Skwarczyński i in.: Laboratoryjne pomiary maszyn elektrycznych, AGH, Kraków 1985.
Opracował: dr inż. Konrad Weinreb
Kraków, grudzień 2010
Wyszukiwarka
Podobne podstrony:
silniki prądu stałego
silnik pradu stalego
Model silnika pradu stalego id Nieznany
Badanie silnika pradu stałego
silnik prądu stałego (tyrystor), Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola
DTR Silnik prądu stałego LD 020 LD 030 LD 055 2
silnik prądu stałego sterowany1, Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola
Ściągi z fizyki-2003 r, Silnik prądu stałego i prądnica prądu zmiennego
Silnik prądu stałego sprawko
bezszczotkowy silnik pradu stalego
sprawozdanie silnik prądu stałego obcowzbudny rozruch?z obciążenia na wale pomiary dynamiczne
Ćwiczenie P1, Silnik prądu stałego p1 i
DTR Silnik prądu stałego LDa 280 LDa327a
P1 Silnik prądu stałego formatka
Ćwiczenie P1, Silnik prądu stałego p1 f
Napedy z silnikiem pradu stalego
Silnik prądu stałego, Fizyka
Automatyka Układ automatycznej regulacji w silnikach prądu stałego
więcej podobnych podstron