METODY OBLICZENIOWE – MATERIAŁY DO ZALICZENIA WYKŁADÓW.
1) Zasady metody przemieszczeo:
a) Stan geometryczny układu prętowego można określid poprzez kąty obrotu węzłów swobodnych i ich
przemieszczenia. Wielkości te stanowią tzw.
niewiadome geometryczne.
Niewiadome te są ulokowane w
wektorze przemieszczeo układu q.
b) W metodzie przemieszczeo pomijamy odkształcalnośd podłużną prętów (element pod wpływem obciążenia nie
zmienia swojej długości).
c) Liczba niewiadomych geometrycznych określa
stopieo geometrycznej niewyznaczalności.
2) Niewiadome metody przemieszczeo – przemieszczenia, obroty i przesuwy węzłów konstrukcji. Określenie liczby
niewiadomych łączy się z podziałem konstrukcji na węzły i elementy.
3) Zasada podziału konstrukcji – podział konstrukcji na węzły i elementy jest dowolny, ale w obliczaniu konstrukcji za
pomocą tradycyjnej metody przemieszczeo dążymy do jak najmniejszej liczby niewiadomych, aby układ równao,
który rozwiązujemy był możliwie najmniejszy.
4) Wektor przemieszczeo układu – wektor zawierający niewiadome przemieszczenia
5) Wektor obciążeo układu – wektor sił działających w węzłach układu w kierunku przemieszczeo
6) Wektor przemieszczeo elementu - wektor przemieszczeo na koocach elementu skooczonego
7) Wektor sił elementowych – wektor zawierający siły przywęzłowe
8) Dyskretyzacja prętowego układu konstrukcyjnego - Podział układu na zbiór węzłów i elementów. Z węzłami
związany jest wektor przemieszczeo i obciążeo węzłowych. Z elementami związany jest wektor przemieszczeo i
obciążeo elementowych.
9) Na co zwracad uwagę przy podziale układu konstrukcyjnego – przy podziale układu konstrukcyjnego na elementy
spotykamy problem wyboru elementu. Wybór elementu zależy od typu rozwiązywanego układu. W zależności od
modelu konstrukcji istotna jest liczba stopni swobody węzła.
10) Stopnie swobody – liczba niewiadomych w węźle.
a) Kratownice płaskie – dwa stopnie swobody w węźle
b) Kratownice przestrzenne – trzy stopnie swobody w węźle
c) Ruszty załamane w planie – trzy stopnie swobody w węźle
d) Ramy płaskie – trzy stopnie swobody w węźle
e) Ramy przestrzenne – sześd stopni swobody w węźle
11) Globalny układ współrzędnych – układ współrzędnych całego układu
12) Lokalny układ współrzędnych – układ współrzędnych poszczególnych elementów po dyskretyzacji układu.
13) Wektor obciążeo węzłowych – R=*M,0,P+ siły występujące w węzłach ulokowane w wektorze w odpowiednich
miejscach – tam gdzie niewiadome. Wektor q odpowiada R w danych układach.
14) Macierz sztywności i podatności układu – macierz sztywności to macierz zawierająca reakcje w założonych więzach
od danego stanu przemieszczenia jednostkowego, macierz podatności zawiera przemieszczenia od danego
jednostkowego obciążenia.
a) Pomiędzy wektorami q i R istnieje zależnośd, którą można zapisad macierzą sztywności – wektor
b) W układach geometrycznie niezmiennych macierz sztywności K jest macierzą nieosobliwą, oznacza to że jej
wyznacznik jest różny od zera.
c) Istnieje zależnośd pozwalająca na uzyskanie macierzy podatności wykorzystując macierz sztywności,przy tym że
macierz K musi byd nieosobliwa
,gdzie F jest macierzą podatności układu.
d) Macierz sztywności musi byd macierzą symetryczną – wynika to z tw. o wzajemności przemieszczeo
e) Macierz sztywności pojedynczego elementu skooczonego jest macierzą osobliwą oznacza to ze jej wyznacznik
jest równy zero
15) Metody wyznaczania macierzy sztywności:
a) Macierz sztywności K można wyznaczyd metodą jednostkowych stanów przemieszczeo
b) Macierz podatności można wyznaczyd metodą jednostkowych stanów obciążeo i skorzystad z zależności
macierzy odwrotne
, przy tym ze F musi byd macierzą nieosobliwą.

16) Jaki sposób rozwiązania opłaca się stosowad w układach statycznie niewyznaczalnych : bardziej opłacalne jest
wyznaczenie macierzy podatności i odwracając ją uzyskad macierz sztywności układu.
17) Macierz sztywności elementu kratowego – macierz ta zawierz w każdym wyrazie element EA/l ,wektor S zawiera
siły normalne, nie występują kąty obrotu oraz przemieszczenia prostopadle do elementu, wektor D zawiera
przemieszczenia równoległe do osi elementu.
18) Macierz sztywności elementu belkowego – przemieszczenia w dowolnym punkcie można zapisad wielomianem 3
stopnia. Wektor S może zawierad siły normalne, prostopadłe oraz momenty, wektor D może zawierad
przemieszczenia równoległe i prostopadłe oraz kąty
obrotu.
19) Symetria macierzy podatności wynika z twierdzenia o wzajemności przemieszczeo
20) Konsolidacja – proces zamiany równao dla pręta podstawowego w układzie równao dla pręta z przegubem.
21) Modyfikacja macierzy sztywności – uwzględnienie warunków podporowych. Zakładamy, że pewne przemieszczenia
węzłowe są równe zero i modyfikujemy macierz poprzez wykreślenie wierszy i kolumn przy odpowiadających im
zerowych przemieszczeniach.
22) Gdy zamiast podpory sztywnej mamy podporę sprężystą to – gdy układ jest podparty podporą sprężystą to
uwzględnienie tej podpory uzyskujemy poprzez dodanie elementu Ks (czyli sztywności ) do wyrazu na głównej
przekątnej macierzy w wierszu i kolumnie odpowiadającej danemu stopniowi swobody.
23) Transformacja układu współrzędnych – macierzowe równanie równowagi a co za tym idzie macierz sztywności
elementu jest zapisywana w lokalnym układzie współrzędnych. Ponieważ równanie równowagi ma byd zapisane we
wszystkich węzłach i obowiązywad dla całego układu konstrukcyjnego istnieje potrzeba wprowadzenia globalnego
układu współrzędnych i zapisania równao w tym układzie. Układ globalny założony jest już na początku
rozwiązywania zadania.
Zmiana układu lokalnego na globalny na poziomie elementu wiąże się z transformacją macierzy sztywności i
wektora obciążeo. Macierz T jest macierzą transformacji zawierającą w każdym elemencie cosinus (x,X),(x,Y),(x,Z) w
pierwszym wierszu i cos(y,X),(y,Y),(y,Z) w drugi wierszu i analogicznie w trzecim wierszu cos(z,X) …. Macierz T jest
macierzą ortogonalną.
24) Wektor alokacji – wektor zawierający adresy poszczególnych przemieszczeo lokalnych. Wiążę ze sobą
przemieszczenia.
25) Agregacja – składanie macierzy sztywności układu z macierzy sztywności pojedynczych elementów
26) Algorytm rozwiązania zadania macierzową metodą przemieszczeo: (układ ramowy)
a) Wykonanie dyskretyzacji układu (podział na elementy)
b) Ustalamy jak będzie wyglądał wektor przemieszczeo globalnych Q oraz sił węzłowych
c) Dla każdego pręta budujemy wektor sił przywęzłowych S, macierz sztywności K oraz przemieszczeo D oraz So
wektor sil przywęzłowych od obc. przęsłowych
- można dokonywad kondensacji macierzy (uwzględniając przeguby zewnętrzne)
- dokonywad transformacji (jak trzeba) do globalnego układu współrzędnych
- po wykonaniu czynności dla wszystkich prętów doprowadzimy do zbudowania wektora S,D i macierzy Ka oraz
So
d) Budujemy macierz alokacji A – ustalamy jak sa powiązane D i Q
e) Obliczamy macierz K=Atransponowane*Ka*A oraz wektor Ro=Atrans*So
f) Jeżeli trzeba to dokonujemy modyfikacji układu równao – uwzględniając warunki podporowe
g) Rozwiązujemy układ równao K*Q=R-Ro
h) Budujemy wektor przemieszczeo przywęzłowych D=A*Q
oraz wyliczamy wektor sił przywęzłowych S=Ka*D+So
27) Kondensacja macierzy sztywności – zakładamy że pewne siły przywęzłowe równe są zero.
Macierz sztywności skondensowana np. względem wektora D jest w postaci :
K=K11-K12*K22do(-1)*K21
28) Macierz obrotu Jacobiego: macierz zbudowana z pochodnych cząstkowych (pierwszego rzędu) funkcji, której
składowe to funkcje rzeczywiste. Jej wyznacznik (jakobian) znajduje zastosowanie w funkcjach wymiernych.

29) Metoda elementów skooczonych (MES) :
a) Idea metody – dzielimy ciało na pewne podobszary zwane elementami skooczonymi
- wprowadzamy podobną geometrię np. trójkąt trzywęzłowy. Trójkąty mogą się zbiegad tylko w narożnikach.
Następnie dokonujemy połączenia w węzłach ciała (skooczona ilośd węzłów – metoda elementów skooczonych)
30) Etapy rozwiązania metodą MES :
a) Kontinuum (ciało) podzielone zostaje w myśli liniami na pewną liczbę skooczonych elementów
b) Zakłada się że elementy te połączone są ze sobą w skooczonej liczbie punktów, znajdujących się na ich
obwodach (nie zawsze w narożnikach).Przemieszczenia punktów węzłowych stanowid będą podstawowy układ
niewiadomych.
c) Zostaje dobrana funkcja, funkcje określające jednoznacznie stan przemieszczeo wewnątrz każdego elementu
skooczonego w zależności od przemieszczeo punktów węzłowych. Funkcję tą nazywamy
Funkcją kształtu
, ta
sama funkcja używana jest do zmiany kształtu elementu krzywoliniowego na prostoliniowy.
d) Funkcje przemieszczeo definiują jednoznacznie stan odkształceo wewnątrz elementów w zależności od
przemieszczeo węzłów. Odkształcenia te wspólnie z odkształceniami początkowymi i własnościami sprężystymi
materiału określają stan naprężeo w całym elemencie, a więc także na jego brzegu.
e) Zostaje określenie układu sił skupionych w węzłach równoważących napięcia na brzegach elementów oraz
wszystkie inne siły działające na ciało i zostaje sformułowany związek, wiążący te siły z przemieszczeniami
węzłów elementów za pomocą tzw. macierzy sztywności.
f) Następnie rozwiązanie powyższego układu równao da nam wektor q i powracając do punktu 4 ze znanymi już
przemieszczeniami można wyznaczyd naprężenia elementu.
31) Metoda elementów skooczonych – zasada dobierania siatki elementów skooczonych i sprawdzenie dokładności
a) Elementy łączą się tylko w węzłach
b) Każdy element posiada tylko jedną wartośd składowej naprężeo i odkształceo
c) Siatkę należy zagęścid tam gdzie spodziewamy się dużych naprężeo (przyłożenie sił skupionych oraz naroża
konstrukcji)
d) Stosunek proporcji boków elementów : najdłuższy do najkrótszego a/b<=3
e) Sprawdzenie czy siatka jest dostatecznie dokładna – zasada podwójnego zagęszczenia siatki –zbudowanie
jednego zadania za pomocą 2 różnych siatek i wtedy porównuje się wielkości naprężeo i odkształceo. Należy
sprawdzid czy przemieszczenia otrzymane w siatce 1 i 2 nie różnią się o więcej niż 5 %. Siatkę zagęszczamy tak
długo, aż uzyskamy rozbieżnośd wyników mniejsza niż te 5%. Najtrudniej uzyskad ten wynik w punktach
przyłożenia sił.
Zasada stałej
odległości od punktów przyłożenia sił pozwala na wyznaczenie naprężeo nie
dążących do nieskooczoności
Rozmiar elementu skooczonego musi byd skooczony – nie można wymodelowad obszaru pół
nieskooczonego.
Należy założyd siatkę taką, aby warunki brzegowe nie miały wpływu na uzyskane wyniki (warunki brzegowe
w miejscu gdzie przemieszczenie to N=0)
Zakładanie siatek dla elementów symetrycznych
(ze względu na geometrie i obciążenie) :
- siatki także powinny byd symetryczne inaczej będą błędne wyniki
Aby wyniki były dokładniejsze można siatkę dwukrotni zagęścid.
32) Co wykorzystujemy do wyznaczenia równao MES - należy wykorzystad zasadę pracy wirtualnej
33) Wnioski dotyczące Funkcji kształtu – dowolna funkcja kształtu należy tak dobrad aby dawała odpowiednie
przemieszczenie węzłów i dla dowolnego węzła miała wartośd 1 oraz 0 dla innych węzłów
34) Kryteria dobierania funkcji kształtu:
a) Powinny byd dobrane tak, aby nie pozwalały na wytworzenie się stanu napięcia w elemencie jeżeli
przemieszczenia węzłów powodują jedynie ruch elementów jako ciała sztywnego
b) Funkcja kształtu musi byd dobrana tak, aby przy zgodności przemieszczeo węzłów z warunkiem stałych
odkształceo można było otrzymad te same odkształcenia
c) Funkcja kształtu powinna byd dobrana tak, aby odkształcenia na granicach między sąsiednimi elementami były
skooczone (chod nie muszą byd określone)
35) Elementy w płaskim stanie naprężenia i odkształcenia
a) Element trójkątny z 3 węzłami : Przemieszczenie wewnątrz elementu uzależnione od q. Zakładamy, że
przemieszczenia wewnątrz elementu nakładają się jako wielomian trzeciego stopnia. Na każdej krawędzi
przemieszczenia muszą się rozkładad jako funkcja liniowa. Macierz przemieszczeo i odkształceo B nie zależy od
punktu w którym przeprowadzamy obliczenia.
W każdym punkcie elementu trójkątnego z trzema węzłami w PSN lub PSO poszczególne składowe wektora
odkształceo mają stałą wartośd.
Powyższe sformułowanie jest zaletą ale też wadą –dla rzadkiej siatki jest małe przybliżenie wyników, więc
należy stosowad gęste siatki elementów skooczonych.
36) Wektor odkształceo początkowych – podstawowe obciążenie np. obciążenie termiczne elementu ma temperaturę
α i ogrzane o delta t
PSN: ε=,αΔt, αΔt,0-
PSO: ε0=(1+v), αΔt, αΔt,0-
37) Analiza stanu naprężeo – trzeba określid właściwości materiału
a) Materiał izotropowy – właściwości jednakowe we wszystkich kierunkach np.stal
b) Materiał ortotropowy – różne właściwości w dwóch prostopadłych do siebie kierunkach np. drewno
38) Macierz konstytutywna [D]- (sprężystości) jest to macierz która opisuje właściwości materiałowe materiału z
którego jest dany element
39) Gdy przyjmujemy układ wsp. w środku ciężkości to obciążenie powierzchniowe przyłożone na elementy rozkłada
się równomiernie
40) Dlaczego met. rozwiązywania całki powierzchniowej wymagają met. startowej?
Ponieważ znamy tylko jeden warunek początkowy.
41) Problemy własne całkowania równao różniczkowych:
- powstaje duży błąd na każdym etapie obliczeo, przy czym rozróżniamy błąd metody i zaokrąglenia, ten błąd
przenosi się na wyniki innych etapów
- problem oszacowania globalnego błędu na danym etapie obliczeo
- problem rozpoczęcia obliczeo związany z warunkiem początkowym, dla wielu metod potrzebna jest znajomośd
funkcji w kilku punktach – wymagana jest specjalna procedura startowa
- problem długości kroku (stabilnośd procesu poprzez odpowiednią długośd kroku; krok musi byd na tyle duży, aby
krok obliczeo był racjonalny; problem zmiany długości kroku w trakcie obliczeo)
- problem całkowitego czasu obliczeo (dla dużych układów bardzo szybko rośnie)
42) Metody rozwiązywania równao różniczkowych:
a) Jawne: met. Eulera, met. punktu środkowego, met. Rungego-Kutty
b) Niejawne: met. trapezów, met. Busfotha-Moultona, met. Newmarka
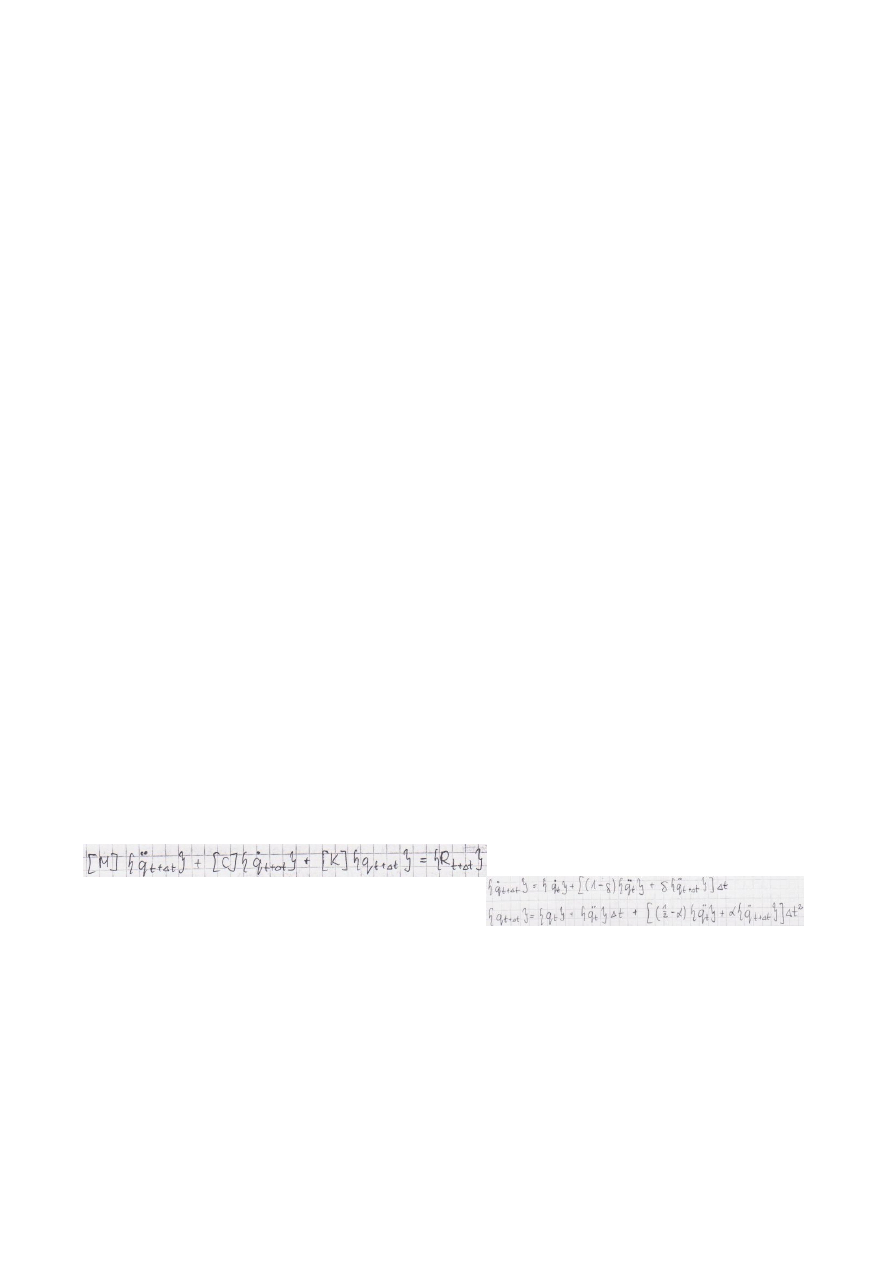
43) Metoda Newmarka: równanie jest zapisywane w chwili t+Δt
Do tego układu równao dochodzą 2 równania
numeryczne na prędkośd i przemieszczenie:
W tych dwóch równaniach pojawiają się współczynniki
alfa i δ
nazywane współczynnikami Newmarka – regulują one proporcje między wartościami w chwili t i t+Δt. Jeżeli δ>0,5 i
alfa>0,25*( δ+0,5)
2
to można przyjąd, że metoda Newmarka jest bezwarunkowo stabilna. Możemy pozwolid sobie na
większy krok całkowania, powoduje to, że w obliczeniach sprężystych met. Newmarka daje wynik znacznie szybciej.

44) Współczynnik nadrelaksacji:
Zazwyczaj używa się współczynnika z przedziału <1,2-1,45>
- gdy w=1 to metoda nadrelaksacji przechodzi w metodę Gaussa-Seidla
- gdy macierz współczynników w układzie równao jest symetryczna i dodatnio określona to met. nadrelaksacji jest
zbieżna
45) Sposoby normalizacji wektorów własnych:
Każdy wektor własny jest określony z dokładnością do stałej k, gdzie k jest dowolną liczbą różną od 0. Ten
współczynnik dobieramy, tak aby spełniony był jeden z warunków:
- suma kwadratów składowych wektora ,x-
T
= 1
- pierwsza składowa wektora ,x-
i
=1
- największa składowa wektora ,x-
i
=1
- suma modułów składowych wektora ,x-
i
=1
46) Układy równao liniowych :
Sposoby rozwiązywania: Stosuje się metody ręczne : podstawienia i wyznaczników lub metody stosowane w
komputerach :
- metody dokładne : dzielące się na dekompozycyjne (m.Gaussa-Crovta, Gaussa-Dolittle’a, Cholewskiego) oraz
na eliminacyjne (Gaussa, Jordana)
- metody przybliżone : (metody iteracji prostej, metody Gaussa-Seidla, metoda Nadrelaksacji)
47) Metody dokładne rozwiązywania układów równao liniowych :
a) Metoda Gaussa : (metoda eliminacji ) i na koocu rekursja
- może się zdarzyd tak, że wyznacznik macierzy współczynników będzie różny od 0. Natomiast dzielnik z operacji
akk=0.Wówczas należy przedstawid wiersze tak, aby na głównej przekątnej eliminowanego równania uzyskad
akk do potęgi (k-1) różne od zera. Takie podstawienie zawsze uda się znaleźd.
- Jeżeli det A=0 to zmiana wierszy nie usunie dzielenia przez 0
- Jeżeli dzielnik ak=akk do (k) można zapamiętad na miejscu jedynki głównej przekątnej, to można łatwo
wyznaczyd wyznacznik macierzy A
- Jeżeli macierz jest dodatnio określona, inaczej jeżeli wyznacznik jest >0 to wszystkie dzielniki ak>0 i
otrzymujemy algorytm bez podstawieo
- Liczba operacji matematycznych potrzebnych do rozwiązania układu metodą Gaussa wynosi n do potęgi (3).
b) Metoda Jordana : (metoda eliminacji) i na koocu brak rekursji
Polega na przekształceniu układu równao w macierz jednostkową a wektor prawych stron staje się
bezpośrednio wektorem rozwiązao. Przekształcamy tu jednocześnie macierz prawych stron i współczynników
48) Metody dekompozycyjne rozwiązywania układów równao liniowych:
Metody dekompozycyjne – Rozłożenie macierzy A na dwie macierze trójkątne (dolną i górną). Każda
nieosobliwa kwadratowa macierz A o rozmiarze n x n można rozłożyd na iloczyn dwóch macierzy trójkątnych

jeżeli wszystkie minory główne macierzy A są różne od zera. Rozkładu można dokonad na n sposobów
dobierając dowolnie n elementów z głównej przekątnej macierzy L lub U.
W metodach dekompozycyjnych mamy dwie rekursje. Rozkład tylko macierzy współczynników nie ruszając
wektora P – nie musimy zmieniad
Wadą metod dekompozycyjnych
jest – ze ma 2 kroki wsteczne.
a) Metoda Gaussa-Dolittle’a
-Każda nieosobliwa macierz A o rozwiązaniu n x n można rozłożyd na iloczyn dwóch macierzy trójkątnych jeżeli
wszystkie minory główne macierzy są różne od zera. Rozkładu tego można dokonad na n sposobów dobierając
dowolne n elementów na głównej przekątnej górnej lub dolnej macierzy trójkątnej.
b) Metoda Gaussa-Crouta
-dobieramy w macierzy U na głównej przekątnej same jedynki.
c) Metoda Choleskiego pozwala rozwiązad układ n równao liniowych z n niewiadomymi, w którym macierz
współczynników jest symetryczna i dodatnio określona, tzn. A=A
H
dla rzeczywistych A=A
T
. Polega na znalezieniu dla
macierzy współczynników układu A macierzy trójkątnej. Ten sposób rozwiązania układu równao ma wadę, że można
ją tylko stosowad, gdy macierz współczynników jest symetryczna i dodatnio określona.
49) Różnice w rozwiązywaniu metodą Gaussa i Newtona –
a) Met. Newtona (stycznych)- określa się w przedziale standardowym <-1,1>podzielonym na n równych części, w
których należy znaleźd wartości funkcji, po czym za pomocą tych wartości wyznacza się odpowiedni wielomian
interpolacyjny i całkuje się go algebraicznie.
b) Met. Gaussa-zamiast rozmieszczad punkty w jednakowych odległościach zakłada się ich rozstaw taki, aby
zapewnid najlepsze przybliżenie do rzeczywistej wartości funkcji. Tak dobiera się ich odcięte i wagi funkcji, aby
odpowiednia zależnośd była równości tożsamościową dla wielomianu potęgowego możliwie największego
stopnia Wyniki rozwiązania są trudne do obliczenia dlatego zostały stabelaryzowane. Mala ilośd funkcji do
wyliczenia.
50) Metoda przybliżona i ścisła
Met. przybliżone – są dobre, gdy mamy duży układ równao, a macierz *A+ ma wiele równych współczynników; - są
dobre, gdy macierz *A+ jest rzadka (wiele elementów = 0); - są niewrażliwe na błędy arytmetyczne w trakcie
obliczeo, a błędy przyspieszają proces iteracji; - nie występują błędy zaokrągleo matematycznych związanych z
przekształceniem układu równao; - są dobre do zastosowania komputerów o małej ilości pamięci
51) Metoda minimum lokalnego i met. Monte Carlo – porównanie:
Met. minimum lokalnego: - metoda zamknięta; - poszukuje się punktu, w którym funkcja osiągnie minimum w <a,
b> z krokiem h; - jeśli funkcja maleje to posuwamy się dalej w tym samym kierunku z tym samym krokiem, jeśli nie
to zawracamy i zmniejszamy długośd kroku o połowę; - można wyznaczyd wszystkie pierwiastki, ekstrema w danym
przedziale
Met. Monte Carlo: - metoda otwarta; - punkty w przedziale wybiera się losowo, a po każdym losowaniu
zapamiętuje się najmniejszą wartośd obliczeniową funkcji oraz wartośd odpowiadającej jej zmiennej X; - przy dużej
liczbie losowao udaje się znaleźd wartośd bliską minimum; + stwarzamy szansę wylosowania punktów, które
mogłyby byd pominięte przy poszukiwaniu systematycznym; + daje szansę wylosowania minimum globalnego, an ie
tylko minimum lokalnego; + może byd stosowana do funkcji nieciągłych; - czasochłonna
52) Sposoby rozwiązywania całek:
- całkowanie met. Newtona-Cates’a
- met. Gaussa
- met. iteracyjne Rombego
- całkowanie bary centryczne
53) Co to są punkty Gaussa w całkowaniu numerycznym :
Zamiast rozmieszczad punkty w jednakowych odległościach zakłada się ich rozstaw taki aby zapewnid najlepsze
przybliżenie do rzeczywistej wartości funkcji. Tak dobiera się ich odcięte i wagi funkcji,aby odpowiednia zależnośd
była równością tożsamościową dla wielomianu potęgowego możliwie największego stopnia.

54) Metody rozwiązywania układów równao (wymienione) :
LINIOWE : dokładne a) met. eliminacji (Gaussa, Jordana)
b)met. dekompozycyjne (Gaussa-Crouta, Gaussa-Dolittla, Cholewskiego)
przybliżone (iteracji prostej Gaussa, Gaussa-Seidla, nadrelaksacji)
NIELINIOWE : a)zamknięte (poszukiwania, połowienia kroku, minimum lokalnego)
b)Otwarte (Monte-Carlo, siecznych, stycznych)
55) Wady i zalety metod iteracyjnych :
a) WADY :
- nie zawsze jest proces zbieżny
- zbieżnośd może zależed od wyboru wartości początkowych
- dla różnych układów równao różne metody pozwalają na uzyskanie szybszych wyników
b) ZALETY :
- są dobre gdy mamy duży układ równao, a macierz A ma wiele równych współczynników
56) Metoda kolokacji :
Niech wartośd funkcji y1,y2,y3 będą dane w punktach x1,x2,x3 szukamy funkcji y=f(x) w postaci kombinacji liniowej
y=a1f1(x)+a2f2(x)+…anfn(x). Funkcje fi(x) są z góry założone.
Kolokacja wielomianowa fi(x)=x(do potęgi i-1) i =1,2,3…,n
57) Aproksymacja : sprowadzenie opisu do jednej takiej funkcji, aby błąd w opisie punktów uzyskanych z doświadczeo
był najmniejszy, liczba punktów przewyższa ilośd punktów potrzebnych do jednoznacznego określenia wzoru funkcji.
- jedna funkcja przybliżająca
- funkcja przechodzi tak, aby błąd przybliżenia punktów pomiarowych był jak najmniejszy
- znaczna liczba punktów pomiarowych
a) sposoby aproksymacji ze względu na sposób liczenia bledu :
- minimum sumy bledów
- minimum sumy wartości bezwzględnych bledów
- kryterium min i max > minimum największego błędu
- minimum sumy kwadratów –metoda najmniejszych kwadratów
A) metoda najmniejszych kwadratów :
- wartośd funkcji y1…,yn dane są w punktach x1,….,xn
- szukamy funkcji jako kombinacji liniowej pewnych funkcji y=a1f1(x)+…..aifi(x),znanych funkcji f1(x)…,fn(x),różnica
i<<n
- błąd i-tego równania
- wsp. ai dobieramy tak aby błąd był najmniejszy
- powstaje układ i równao z i niewiadomymi
- kontrola błędu : wariacja, odchylenie standardowe, rozwiązanie
- statyczna ocena rozwiązania : wartośd średnia i kwadrat odchyleo, odchylenie standardowe i wariacja, wsp.
wariacji, standardowy błąd przybliżenia, wsp. determinacji, wsp. korelacji, rozwiązanie
58) Interpolacja: polega na znalezieniu opisu takich funkcji, które przebiegają przez punkty doświadczalne. Takich
punktów jest zazwyczaj za mało.
Charakterystyka :
- kilka funkcji przybliżających
- funkcje przechodzą przez wszystkie punkty pomiarowe
- niewielka liczba punktów pomiarowych
a) Rodzaje interpolacji :
- Interpolacja liniowa – przechodzi przez kolejne punkty, jest to zbiór funkcji y=f(x). Najprostsza metoda stosowana
dla funkcji stablicowanych. Odległośd między punktami jest stała.
- Interpolacja kwadratowa – wybór 3 najbliżej siebie leżących punktów o jednakowej odległości względem siebie i
opisanie ich położenia za pomocą paraboli 2 stopnia.
- Interpolacja wielomianowa dowolnego stopnia n
Wyszukiwarka
Podobne podstrony:
3 ANALITYCZNE METODY OBLICZANIA PŁYWÓW
Metody obliczeniowe
więcej podobnych podstron