2013-12-01
Podstawy automatyki -
ćwiczenia
1
Charakterystyki czasowe
Podstawy automatyki
2013-12-01
Podstawy automatyki -
ćwiczenia
2
Charakterystyka czasowa:
x(t)
y(t)
Jest to przebieg odpowiedzi y(t)
układu dynamicznego
na podane na jego wejście wymuszenie x(t).
Zmienną niezależną jest czas – t .
2013-12-01
Podstawy automatyki -
ćwiczenia
3
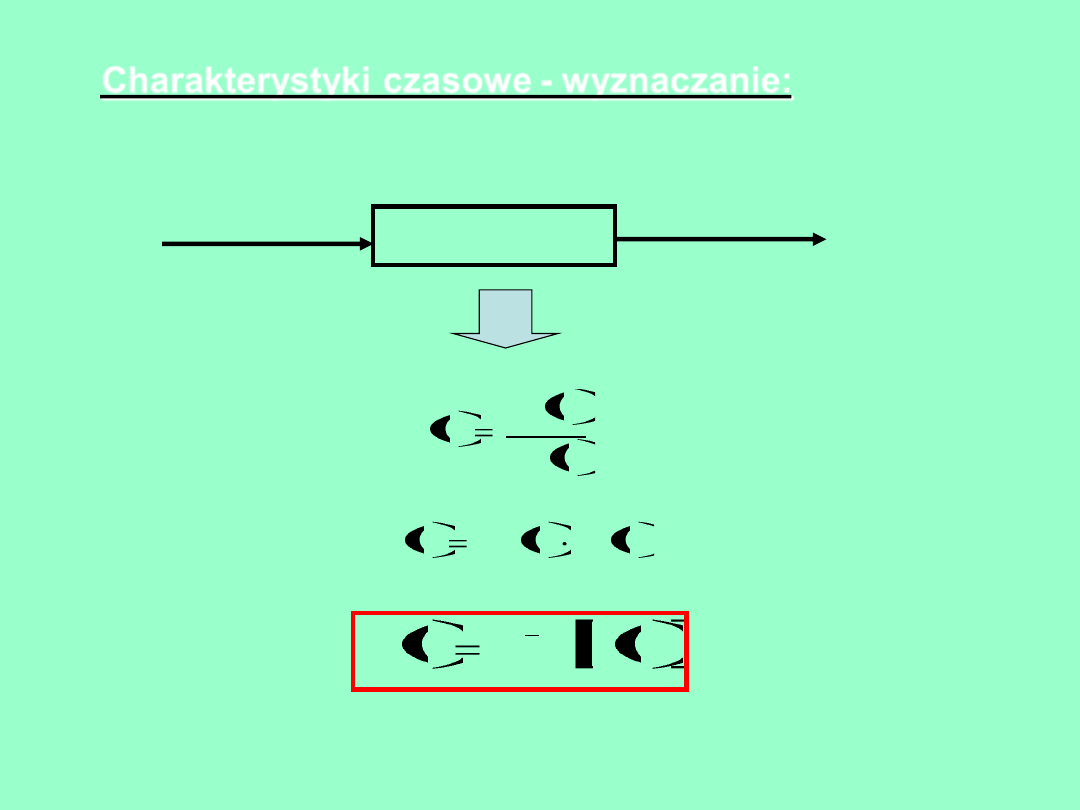
Charakterystyki czasowe - wyznaczanie:
s
X
s
Y
s
G
G(s)
X(s)
Y(s)
s
G
s
X
s
Y
s
Y
L
t
y
1
2013-12-01
Podstawy automatyki -
ćwiczenia
4
Charakterystyki czasowe
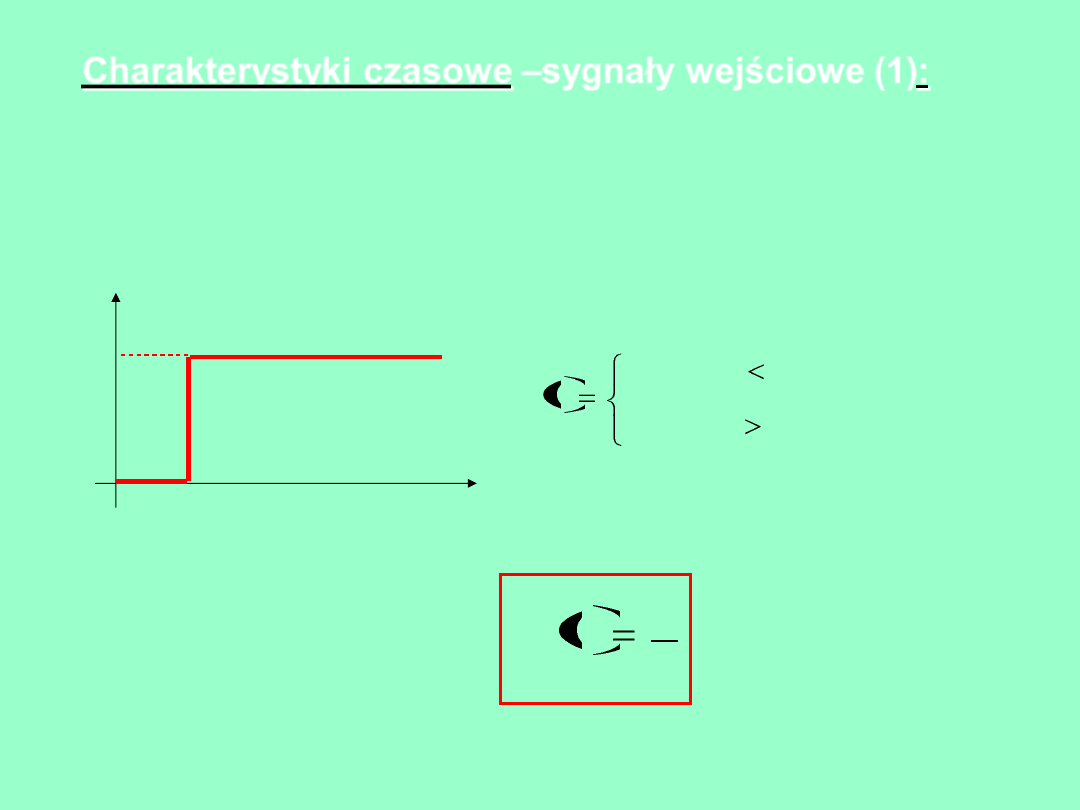
–sygnały wejściowe (1):
s
s
X
1
x(t)
t
t
0
0
1
0
0
dla
1
dla
0
t
t
t
t
t
x
skok jednostkowy (funkcja Heaviside’a):
2013-12-01
Podstawy automatyki -
ćwiczenia
5
Charakterystyki czasowe
–sygnały wejściowe (2):
1
s
X
x(t)
t
t
0
0
0
0
0
dla
0
dla
dla
0
)
(
t
t
t
t
t
t
t
t
x
wymuszenie impulsowe (funkcja Dirace’a):
2013-12-01
Podstawy automatyki -
ćwiczenia
6
Charakterystyki czasowe (3):
Do najbardziej rozpowszechnionych charakterystyk
czasowych należą:
-
h(t)
– charakterystyka skokowa
odpowiedź układu na wymuszenie w postaci
skoku jednostkowego 1(t)
– Heviside’a,
-
k(t)
– charakterystyka impulsowa
odpowiedź układu na wymuszenie w postaci
jednostkowego wymuszenia impulsowego
δ(t) – Dirace’a
2013-12-01
Podstawy automatyki -
ćwiczenia
7
Charakterystyki czasowe
– (4):
Użyteczne zależności:
(1):
dt
t
k
t
h
)
(
)
(
(2):
)
(
)
(
t
h
dt
h
d
t
k
2013-12-01
Podstawy automatyki -
ćwiczenia
8
Jak wyznaczać ch-ki czasowe?
• za pomocą tablic wyznaczamy
y(t) = L
-1
[ Y(s) ]
1)
Układ opisany równaniem różniczkowym:
• dokonujemy przekształcenia Laplace’a r. różniczkowego;
• i wyznaczamy –
G(s)
• korzystając z def. tr. operatorowej wyznaczamy:
2
)
U
k
ł
a
d
o
p
i
s
a
n
y
t
r
a
n
s
m
i
t
a
n
c
j
ą
o
p
e
r
a
t
o
r
o
w
ą
)(
)(
)(
sX
sY
sG
)
(
)
(
)
(
s
X
s
G
s
Y
• podstawiamy za X(s) -
1/s
lub
1
• i wyznaczamy
Y(s)=L(s)/M(s)
2)
Układ opisany transmitancją operatorową
G(s)
• doprowadzamy
Y(s)
do postaci dogodnej do skorzystania z
tablic;
2013-12-01
Podstawy automatyki -
ćwiczenia
9
Obliczyć charakterystyki czasowe dla układu o
transmitancji operatorowej (1/4):
• Wyznaczanie charakterystyki skokowej
h(t)
• Transformata skoku jednostkowego:
• Wzór ogólny transmitancji operatorowej:
• Z transformaty sygnału wyjściowego:
• Otrzymujemy:
1
5
10
s
s
s
G
s
t
L
1
1
s
X
s
Y
s
G
s
X
s
G
s
Y
s
s
Y
1
1
5s
10s
2
,
0
1
2
2
,
0
2
1
5s
10
s
s
2013-12-01
Podstawy automatyki -
ćwiczenia
10
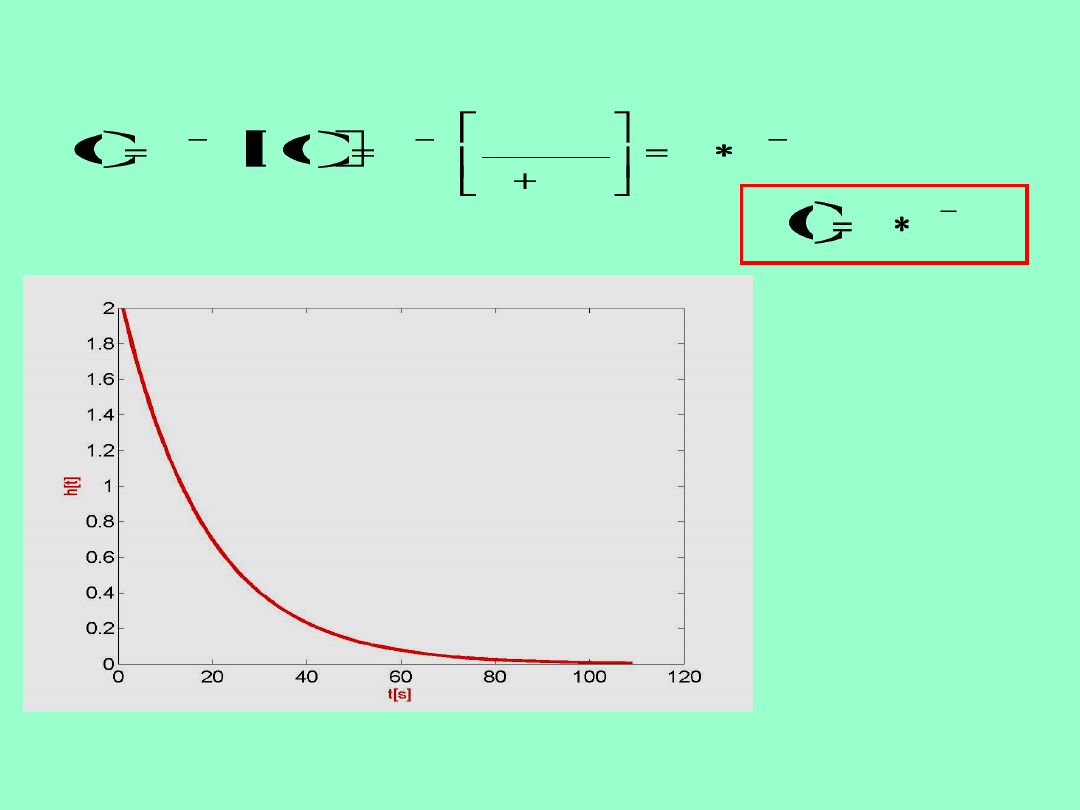
Obliczyć charakterystyki czasowe c.d. (2/4):
• Po skorzystaniu z tablic znajdujemy oryginał:
• Więc ostatecznie charakterystyka skokowa:
t
e
t
h
2
,
0
2
t
e
,
s
L
s
Y
L
t
h
2
,
0
1
1
2
2
0
2
i przebieg charakterystyki skokowej
2013-12-01
Podstawy automatyki -
ćwiczenia
11
Obliczyć charakterystyki czasowe c.d. (3/4):
• Wyznaczanie charakterystyki impulsowej k(t)
• Transformata impulsu Diraca:
• Z transformaty sygnału wyjściowego:
• Otrzymujemy:
1
t
L
1
5s
10s
s
X
s
G
s
Y
1
5s
10s
1
L
t
k
2
,
0
s
1
2
1
s
L
2
,
0
s
2s
1
L
dt
e
d
t
)
(
2
2
,
0
2
,
0
s
1
2
1
L
s
2013-12-01
Podstawy automatyki -
ćwiczenia
12
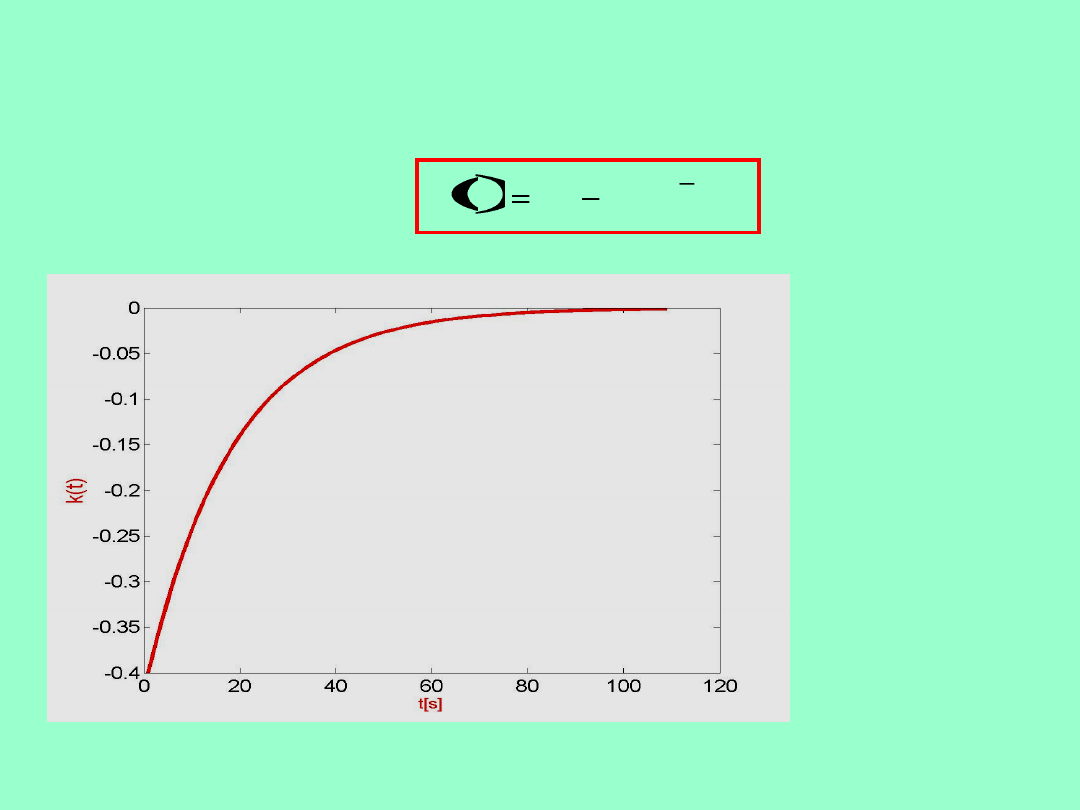
Obliczyć charakterystyki czasowe c.d. (4/4):
• Więc ostatecznie charakterystyka impulsowa:
t
e
t
k
2
,
0
4
,
0
i przebieg charakterystyki impulsowej
2013-12-01
Podstawy automatyki -
ćwiczenia
13
Wyszukiwarka
Podobne podstrony:
lab 1 pomiar charakter czasowych i cz stot
charakter czasowe nawigacja
2 Charakterystyki Czasowe
L2 Badanie charakterystyk czasowych liniowych układów ciągłych
Narysować charakterystykę czasowo
Charakterystyki czasowe 3 id 11 Nieznany
L2 Badanie charakterystyk czasowych liniowych układów ciągłych wartości elementów
charakterystyki czasowe id 1110 Nieznany
CHARAKTERYSTYKI CZASOWE, Miernictwo Cyfrowe
Charakterystyki czasowe Ćw * , Automatyka
charakterystyki czasowe i czestotliwosciowe
Jak czytać charakterystykę czasowo-prądową bezpieczników
Regulator PID charakterystyki czasowe i częstotliwościowe
Narysować charakterystykę czasowo
syposz,podstawy automatyki, CHARAKTERYSTYKI CZASOWE
Charakterystyki czasowe układów dynamicznych
Charakterystyki czestotliwosciowe JG
więcej podobnych podstron