RW
1
Przetworniki
czujniki
i
ich właściwości
RW
2
Przetworniki
jednowymiarowe
i wielowymiarowe
Przetwornik jednowymiarowy
SISO
(
Single Input Single Output
) -
jedno
wejście
i jedno
wyjście
.
RW
3
Przetworniki
jednowymiarowe
i wielowymiarowe
MISO
(
Multiple Input Single
Output
) – przetwornik
mierzący
kilka
wielkości
wejściowych
, celem
określenia
jednej
wielkości
wyjściowej
.
RW
4
Przetworniki
jednowymiarowe
i wielowymiarowe
MIMO
(
Multiple Input Multiple
Output
) - przetwornik o
wielu wejściach
i
wielu
wyjściach
.
Każde z
wejść
przetwornika
wielowymiarowego
jest
przetwornikiem
jednowymiarowym.
RW
5
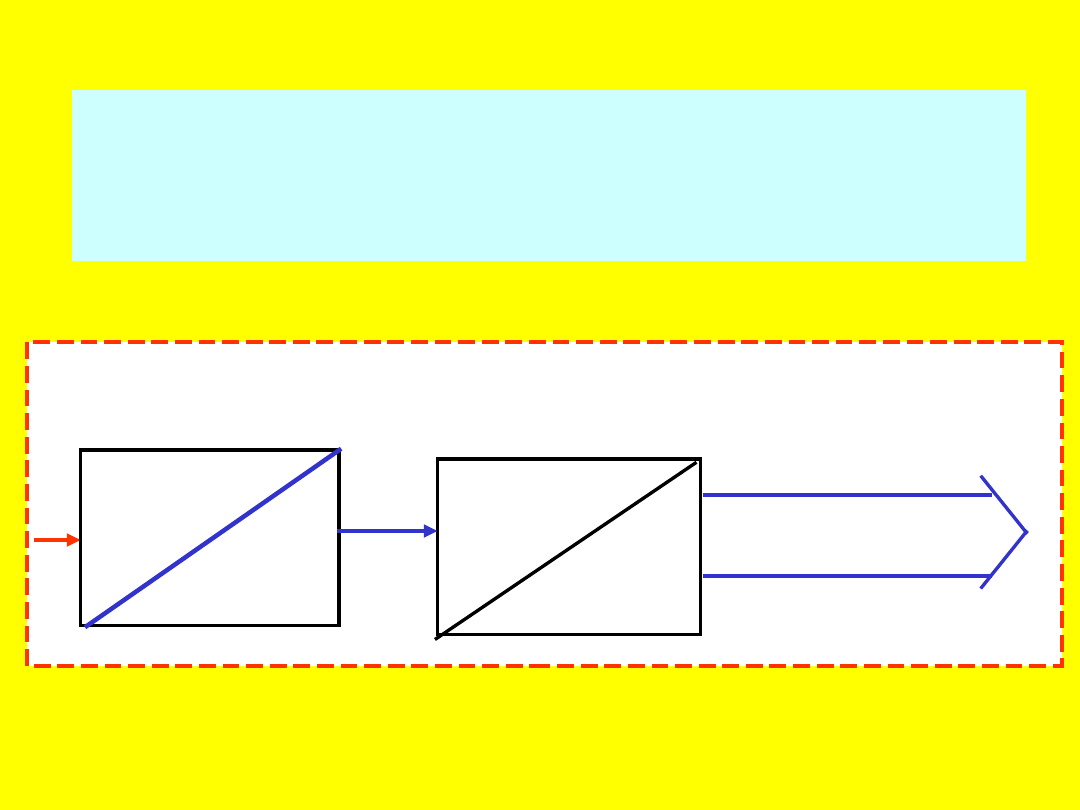
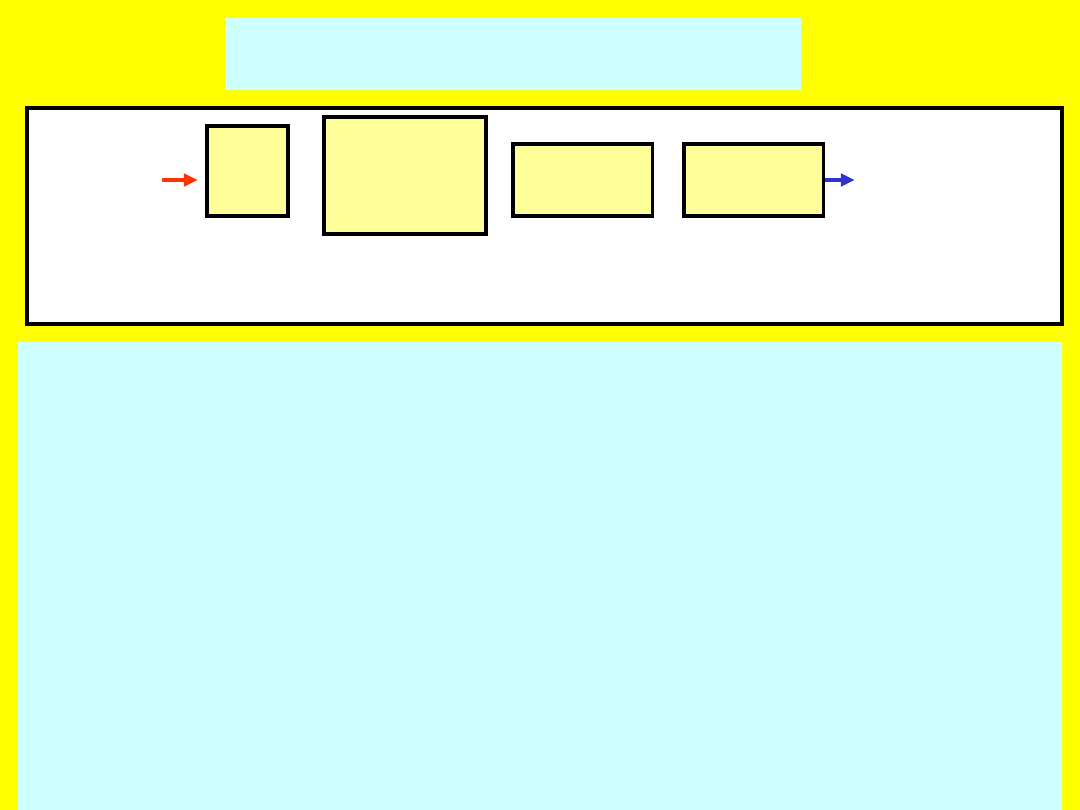
P
Struktura przetwornika
złożonego
Przetwornik
złożony
składa
się z
blo-ków
(
struktura
wielostopniowa
), w których
występuje
przetwarzanie in-
formacji pomiarowej
(
przetwarzanie pośrednie
), a
czasem
przesył tej infor-
macji
(
tor pomiarowy
).
Elementy
przetwornika
złożonego
to
przetwornik
pierwotny
,
pośredni
i
końcowy
.
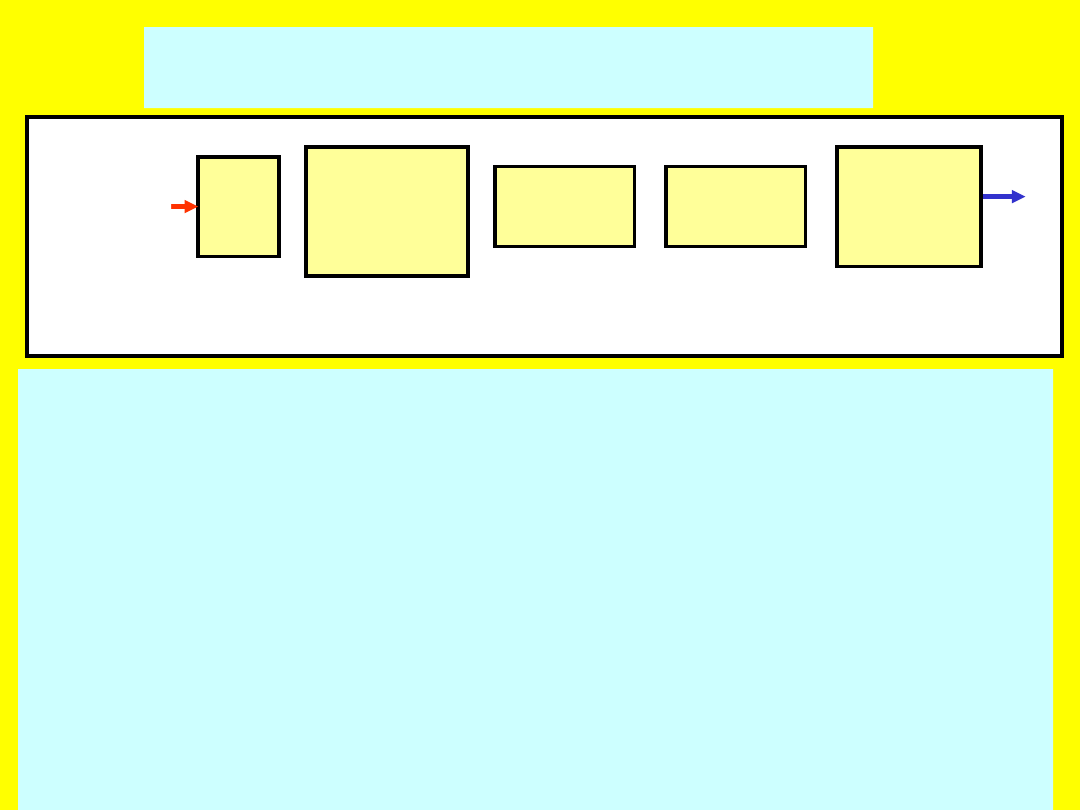
RW
6
Wyjściowy sygnał
często
wymaga prze-słania
go na
pewną
odległość
, co
tworzy
tor pomiarowy
.
Przetwornik
wtórny
x(
t)
Przetwor
nik
pierwotny
czyli
Czujni
k
Modulat
or
Koder
Przetwor
nik A/C
Nadajnik
Demodula
tor
Dekode
r
Odbiorn
ik
y(t
)
k
o
n
d
y
c
j
o
n
e
r
Przetwor
nik C/A
Przetwor
nik
wizualizu
-jący
RW
7
Przetwornik pierwotny
(
czujnik elementarny –
generacyjny
lub
parametryczny
)
pobiera
informację pomiarową
z wielko-ści
mierzonej
i
przekształca
ją na
wiel-kość
fizyczną
(
sygnał pomiarowy
)
akce-ptowalną
przez dalsze
elementy systemu
.
Czujnik
z
reguły
przetwarza
wielkość
nieelektryczną
na
elektryczny
sygnał po-miarowy.
RW
8
Przetwornik wtórny
Przetwornik wtórny
(
pośredni
)
zajmuje się
kondycjonowaniem
sygnału pomiarowego.
Odpowiednie
elementy
przetwarzają
sygnał elektryczny
(np. z
napięciowego
na
prądowy
),
wzmacniają
go,
filtrują
itp.
Przy
przesyłaniu
sygnału
blok
przetwor-nika wtórnego
zawiera
urządzenia
przesyło-we
(
modulatory
,
kodery
,
dekodery
,
przet-worniki A/C, C/A
,
nadajnik
,
odbiornik
).
RW
9
Przy
dystansach
powyżej
kilku kilometrów
stosuje się
modulację syg-nału.
Sygnał
przesyłany jest
drogą
prze-wodową
(przewód
koncentryczny
,
skrętka
,
światłowód
,
sieć
telefoniczna
) lub
bezprzewodową
–
drogą
radiową
.
RW
10
Przetwornik końcowy
Przetwornik końcowy
odpowiada za
standaryzację
i
dopasowanie
energetyczne
sygnału
do
systemu
z
którym
współpracuje
,
może także
zajmować
się
wizualizacją
wyniku
pomiaru.
RW
11
Przetwornik końcowy
c.d.
Przetwornik wizualizujący
– może to być
CPO
(
Cyfrowy Panel Od-
czytowy
) zbudowany na
diodach
świecących
lub
ciekłych
kryszta-łach
,
monitor
lub
drukarka
.
RW
12
Tor sprzężenia
zwrotnego
jako tor
pomiarowy
W
systemach sterowania
nie
stosuje
się
wizualizacji
wszystkich zmiennych stanu
,
dlatego często
sygnały
te
wpro-wadza
się
wprost
do
sterownika
po-przez
karty
wejścia
/
wyjścia
I/O
(
Input
/
Output
)
.
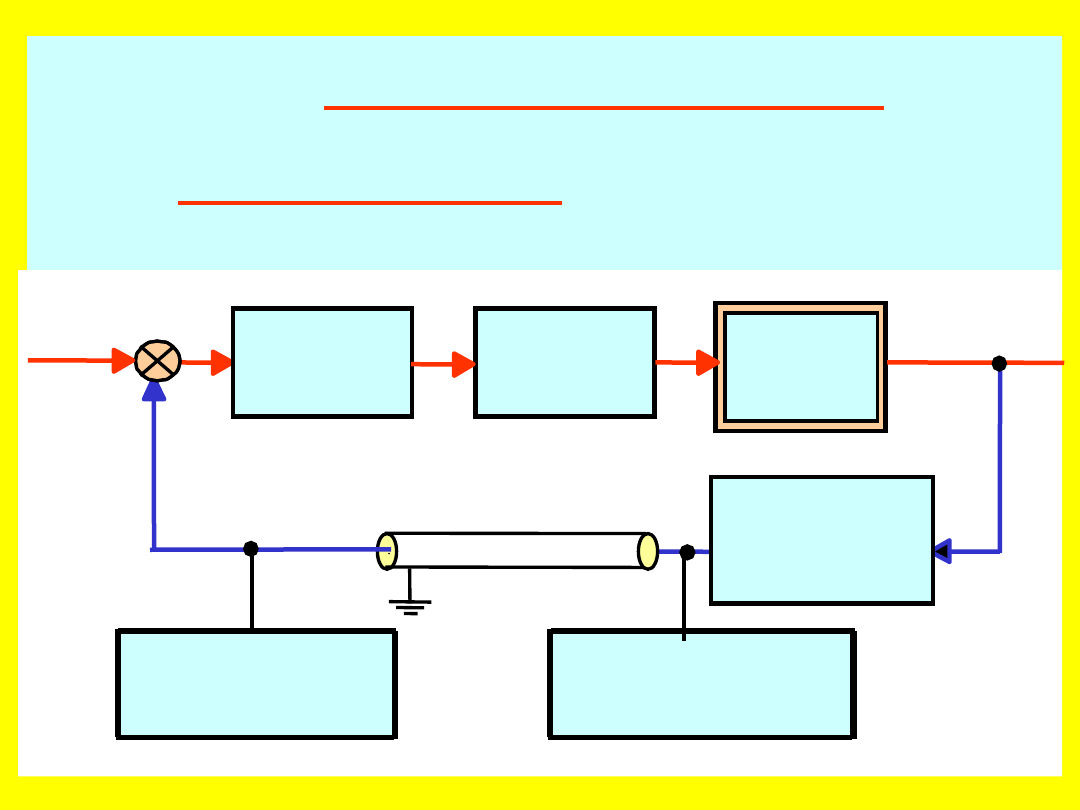
RW
13
Tor sprzężenia
zwrotnego
jako tor
pomiarowy
Regulat
or
Element
y
wykonawc
ze
Obie
kt
X
zadan
e
Linia
przesyłowa
Przetworni
k
wizualizują
cy
Przetworni
k
wizualizują
cy
Przetwor
nik
pierwotn
y
Y
wyjścio
we
RW
14
Tory pomiarowe
Tory pomiarowe
stosowane w
przetworni-kach
, w zależności
od
typu sygnału gene-rowanego
przez
czujnik
, można
podzielić
na:
• analogowo
–
amplitudowe
,
• analogowo
-
częstotliwościowe
,
• cyfrowe
,
RW
15
Przetwornik
z
torem
analogowo - amplitudowym
Stwarza
on
największe
trudności
we współpracy ze
sterownikiem
.
Składa się on z
przetwornika
pierwot-nego
(
czujnika
) oraz
kondycjonera
, który może
wzmacniać
,
normalizować
(prze-
kształcać
sygnał napięciowy
w
standardo-wy prądowy
),
linearyzować
,
kompensować
wpływ temperatury
itp.
RW
16
Przetwornik
z
torem
analogowo –
amplitudowym
Najczęściej
sygnałem
wyjściowym
jest
napięcie
0 ÷
10 V
lub
sygnał prądowy
0 ÷ 20 mA
lub
4 ÷ 20 mA.
Ciągła
zmien
na
stanu
Ciągły
sygnał
elektryczn
y
Przetworni
k
pierwotny
Kondycjon
er
x
u,
i
x
u,
i u,
i
u, i
RW
17
Przetworniki
analogowo
–
częstotliwościowe
i
analogowo
- cyfrowe
Przetworniki
analogowo -
częstotliwo-ściowe
(
a/c
) mogą
być typu
bezpośredniego
i
pośredniego
.
Sygnały wyjściowe
z
przetwornika
a/c
można
bezpośrednio
wyprowadzić
do
stero-wnika
gdzie,
podawany
jest do
licznika
,
któ-ry zlicza
impulsy
w
określonym
przedziale czasu
generowanym
przez
podstawę
czasu
.
RW
18
Sygnał o
zmiennej
częstotliwości
Ciągła
zmienna
stanu
f
f
x
x
Przetwornik
bezpośredni
z
torem
analogowo -
częstotliwościowym
Liczba
tych
impulsów
w
prze-dziale
czasu
jest
miarą
sygnału wejściowego
.
RW
19
x
Ciągła
zmienna
stanu
x
d
Wektor
informacji
cyfrowej
Przetwornik bezpośredni
z
torem cyfrowym
Przetworniki cyfrowe
np.
tarcze kodowe
pozwalają
uzyskać wprost wektor
informacji cyfrowej
.
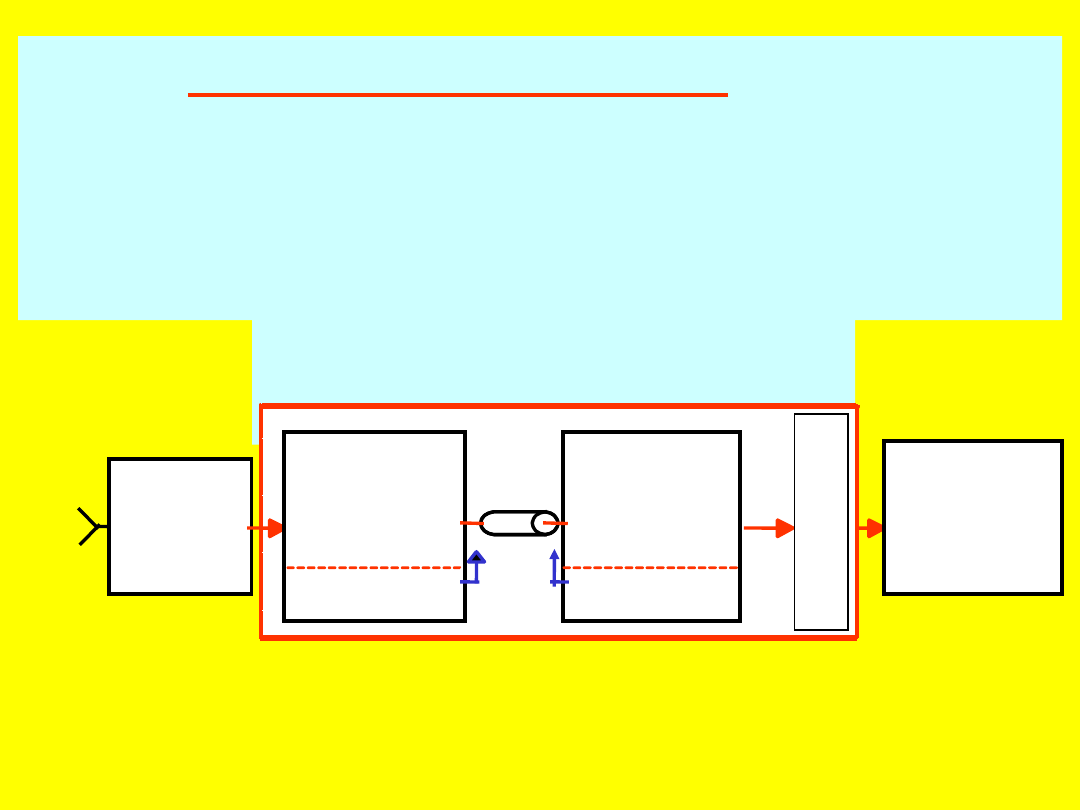
RW
20
Przetwornik pośredni z
torem
analogowo -
częstotliwościowym
Przetwornik
analogowo-
amplitudowy
Przetwornik
napięcie/prąd
na częstotliwość
f
u,
i
x
u,
i
x
f
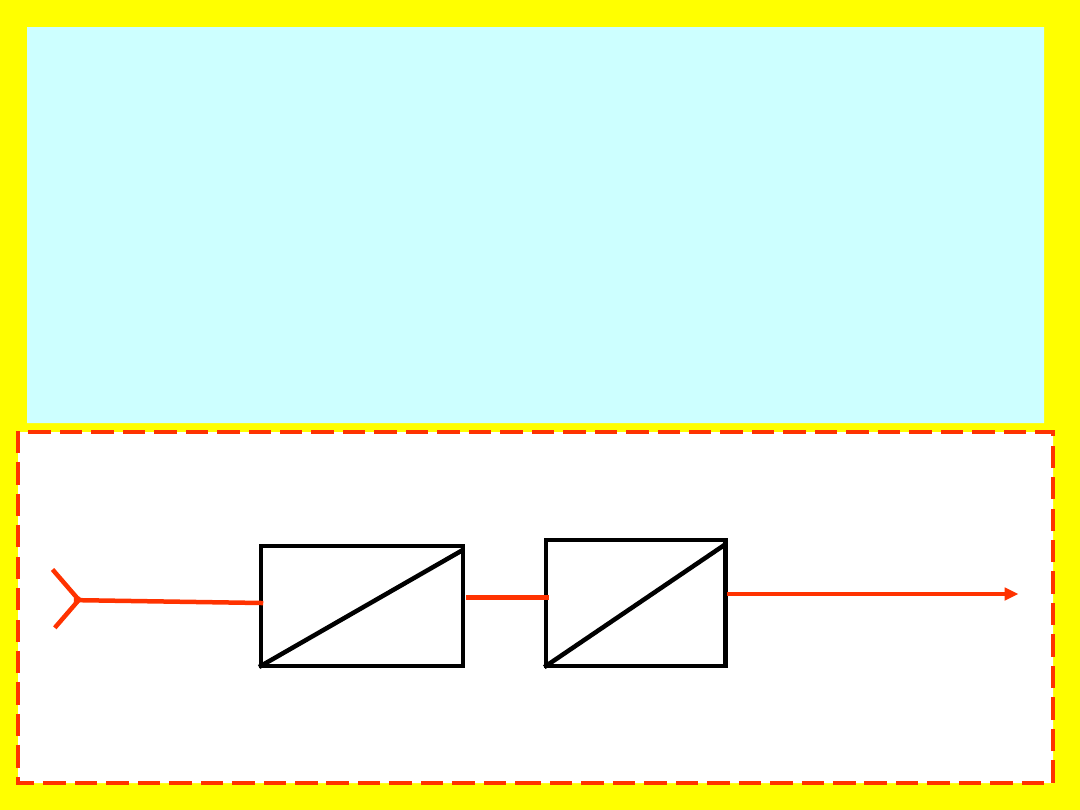
RW
21
Przetwornik pośredni z
torem
analogowo - cyfrowym
Przetwornik
analogowo-
amplitudowy
u, i
x
A(u,
i)
x
C(d
)
Przetwornik
analogowo-
cyfrowy
Wektor
informacji
cyfrowej
RW
22
Elektryczne metody
pomiarowe
Współczesne
miernictwo
cechuje
powszechne stosowanie
elektrycznych
metod
pomiarowych.
Dotyczy to
pomiaru
prawie
wszystkich wielkości
fizycznych
i
chemicznych
.
RW
23
Zalety elektrycznych
metod pomiarowych
• duża
dokładność
i
czułość
,
• możliwość
stosowania
tej samej
aparatury
dla
szerokiego
zakresu
i dla
różnorodnych
wielkości
fizycznych
,
• szeroki
zakres
częstotliwościowy
0 f
f
max
RW
24
Zalety elektrycznych
metod pomiarowych
• możliwość
automatyzacji
pomiarów
i
przekazywania
wyników
na
odległość,
• możliwość
operacji
matematycz- nych
(
automatyczne
uwzględnianie
poprawek
,
sumowanie
,
różniczkowa-nie
i
całkowanie
sygnałów
).
RW
25
Wymagania dla
przetworników
analogowych
W
układach pomiarowych
od
przet-worników
analogowych
wymaga się
przede wszystkim:
• dużej
liniowości funkcji
przetwarzania
,
• dużej
czułości pomiarowej
,
• pomijalnie
małego wpływu
parametrów zakłócających
,
RW
26
Wymagania dla
przetworników
cyfrowych
W
układach pomiarowych
gdy
przy-rządy pomiarowe
zawierają
bloki cyfrowe-go
przetwarzania
sygnałów
od
przetwor-ników cyfrowych
wymaga się
nastę-pujących
parametrów
:
• dużej
stabilności
w czasie
funkcji przetwarzania,
RW
27
• dużej
powtarzalności
parametrów
pomiędzy
czujnikami
w jednej serii
produkcyjnej
i pomiędzy
seriami
pro-dukcyjnymi
,
• czujnik
powinien mieć
sygnał
wyj- ściowy
w postaci
cyfrowej
,
• powinien
być
wyposażony
w
stan- dardowy interfejs
,
RW
28
• komunikacja
z
zewnętrznym
systemem komputerowym
powinna się odbywać w
oparciu o
standardowy
protokół
(co wynika z
powszechności
stosowania
komputerowych systemów
pomiarowych
).
Spełnienie
tych
postulatów
(przy zacho-waniu
miniaturowych
wymiarów
i
niskich
kosztów
wytwarzania
)
jest możliwe przy zastosowaniu
technologii
półprzewodniko-wej
(
“mikromechanika w krzemie”
).
RW
29
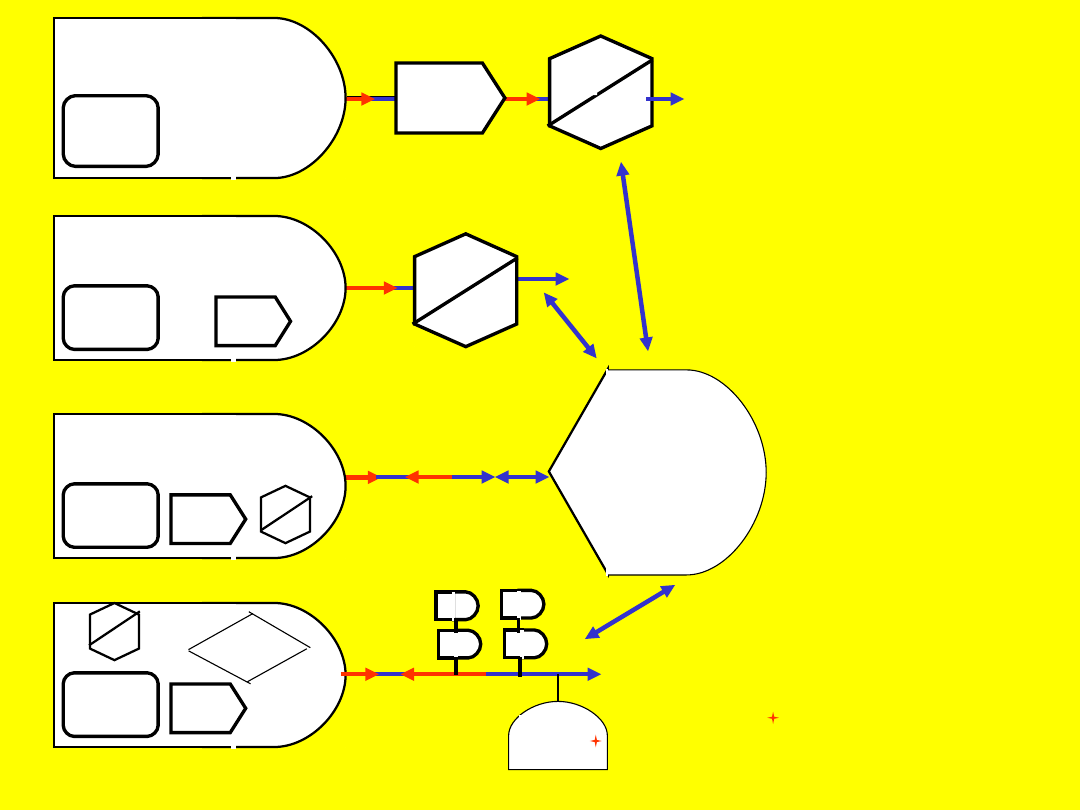
A
element
czujniko
wy
Mechanicz
ny
Elektrycz
ny
Optyczny
Itp.
Sygnał
wyjściowy
Sensor
el.
cz
elektryc
zny
sygnał
analogo
wy
kond
y
cjon
er
B
B.
Sygnał wyjściowy
z
przetwornika
pierwotnego
jest
przetworzony
za
pośrednictwem
kondycjone-ra
na
sygnał
elektryczny
(zwykle
standardowy
),
A.
Mierzony sygnał
jest
przetworzony
na
dowolną
wielkość pomocniczą
odczytaną
przez
człowieka
lub
wykorzystaną
w
procesie
sterowania
.
Rozwój
przetworników
RW
30
System
wyższe
go
poziom
u
Zdecentralizo
wane
przetwarzanie
c
a
D
el.
cz
E
F
Pr.
Cf.
Pro
c.
Cyfr
.
C
sygn
ał
cyfro
-wy
a
c
el.
cz
C.
Dodatkowo
współ-pracujący
przetwornik a/c
przekształca stan-
dardowy sygnał
elektry-czny na
postać cyfrową
D.
Przetwornik
pier-wotny i
kondycjoner
stanowią jedną
całość
E.
Przetwornik
pier-wotny
zintegrowany
wraz z
kondycjone-rem
i przetwornikiem
a/c
, pierwszy
krok w kierunku
inteligen-tnych
przetworników
pomiarowych
IPP
F.
Typowy
inteligentny
przetwornik
pomiarowy
RW
31
Przetworniki wielowymiarowe
Autonomiczne maszyny
i
roboty
wy-magają określenia
zmiennych
stanu
w
przestrzeni
takich jak
położenie
,
pręd-kość
,
przyśpieszenie
.
Nowe technologie
wymagają
opracowania przetworników
zminiaturyzowanych
(np.
czujnik
ciśnienia
o rozmiarach
ułamka
milimetra
).
RW
32
Przetworniki
wielowymiarow
e
(
cd
)
Przetworniki
te
charakteryzują
się
wy-soką
niezawodnością
(niejednokrotnie są
samonaprawialne
) i
wysoką
klasą dokła-dności
.
Poprawę
klasy
dokładności
można
uzyskać
przez
zmniejszenie wpływu
głów-nych zakłóceń
.
W tym celu
mierzy
się
równocześnie
kil-ka
wielkości
wejściowych
.
RW
33
Współpraca przetwornika z
systemem
Przetwor
nik
inteligent
ny
Komputer
System
pomiarow
y
Protokół
komunikacyj
ny
Inteligencja przetwornika
jest
wynikiem implementacji
mikrokontrolera
(
sterow-nika
mikroprocesorowego
)
wyposażonego w odpowiednie
oprogramowanie
.
RW
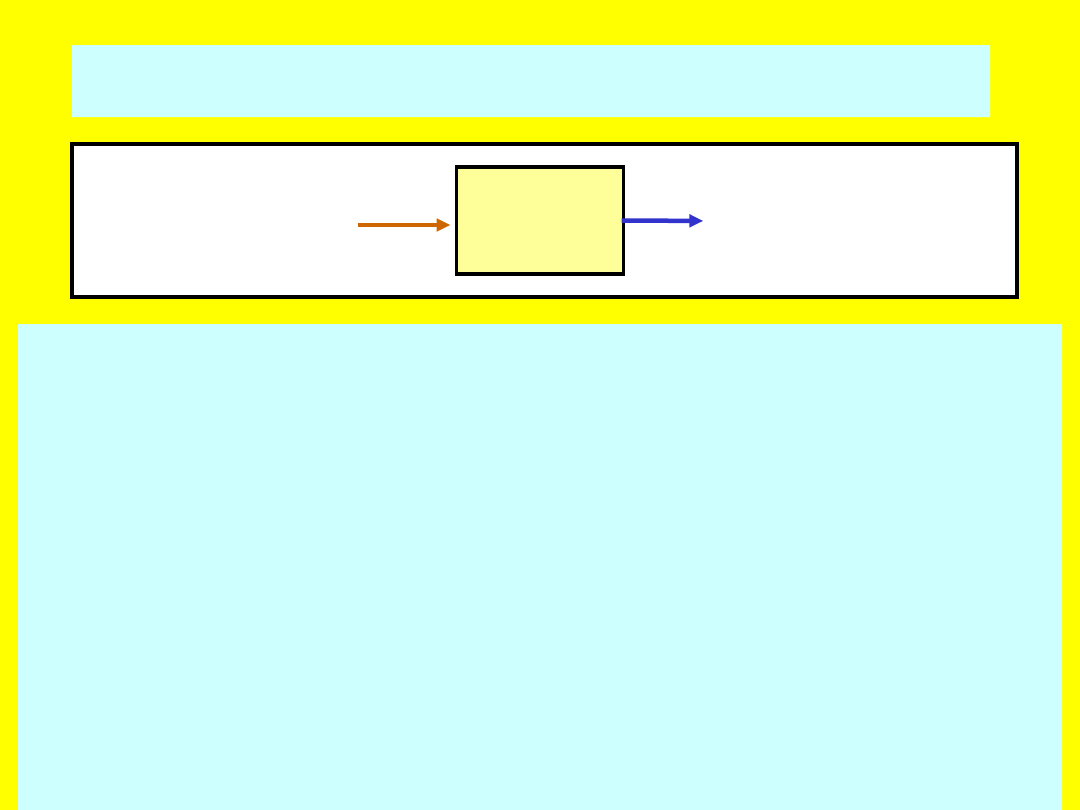
34
Przetwarzanie wielkości
mierzonej
Jest to
podstawowa
funkcja
,
jaką speł-nia każdy
czujnik
.
Przetwarza
on
mierzony
parametr
na
sygnał
pomiarowy
(z reguły
elektryczny
). W
zależności od
charakteru
wielkości mierzonej
przetworniki
mogą mieć
budowę
zarówno
prostą
jak i bardzo
złożoną
(np.
czujniki obecności gazów
).
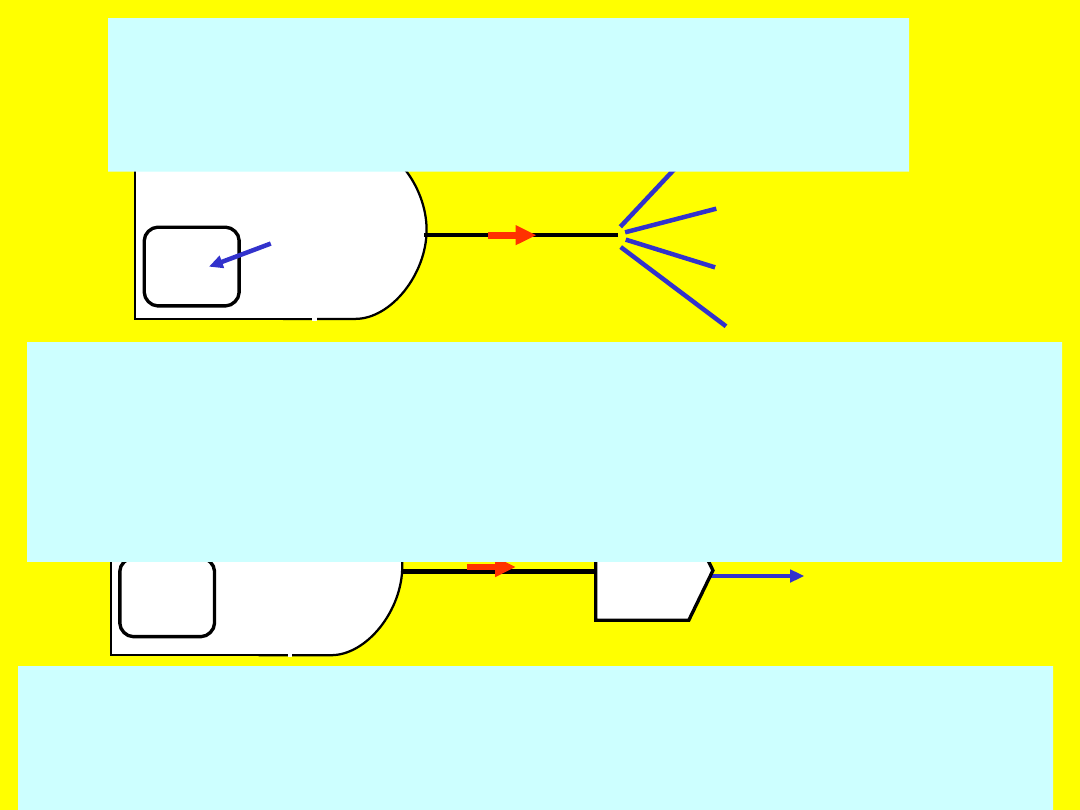
BODZIEC
ZEWNĘTRZNY
CZUJNIK
SYGNAŁ
WYJŚCIOWY
RW
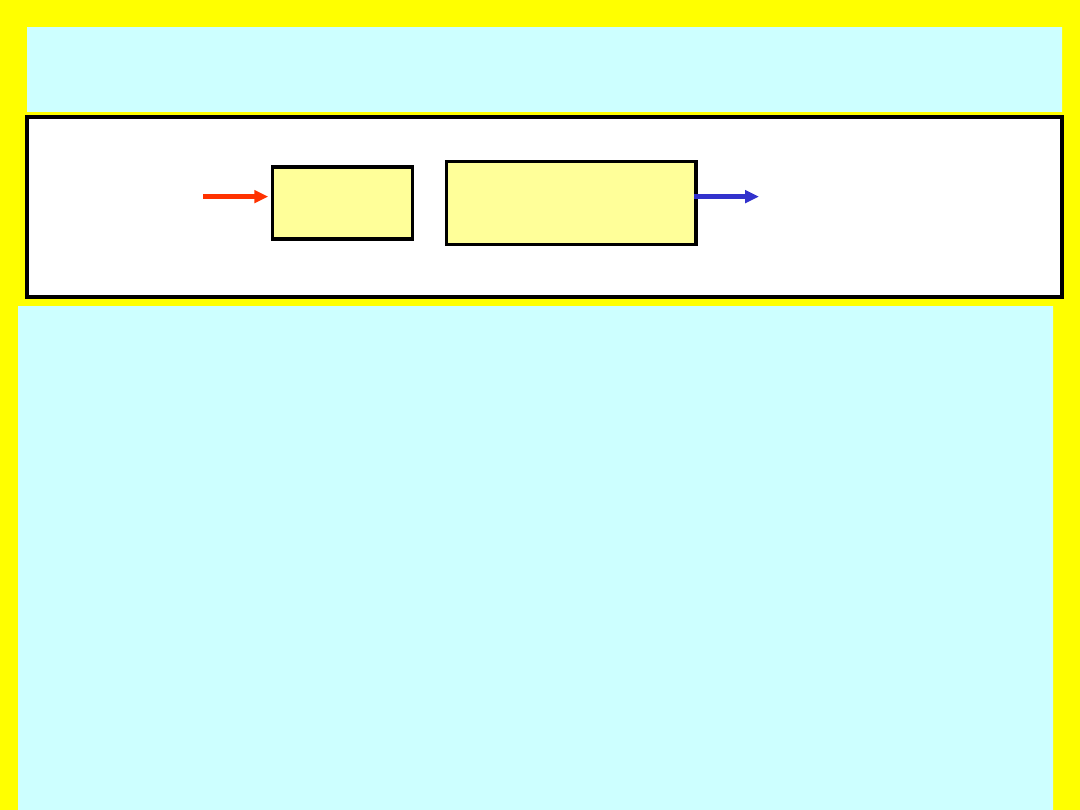
35
Kompensacja wpływu
otoczenia
Przetwornik
, prócz
wielkości
mierzonej
,
uwzględ-nia zakłócenia
pojawiające się
na wejściu
.
Sygnał
pomiarowy
jest
skorygowany
i
dopasowany
do
sy-stemu
, co
odciąża
jednostkę centralną
z pewnego
ciężaru obliczeniowego
.
Kompensacja
wpływu
temperatury
i
pola magnetycznego
są
najpowsze-
chniej
stosowanymi
funkcjami
i
powodują umiej-scowienie
czujnika
na
drugim poziomie rozwoju.
SYGNAŁ
WYJŚCIOWY
odporny na zakłócenia
elektromagnetyczne
i zmiany środowiska
BODZIEC
ZEWNĘTRZNY
CZUJNI
K
KOMPENSACJ
A
ZAKŁÓCEŃ
+
RW
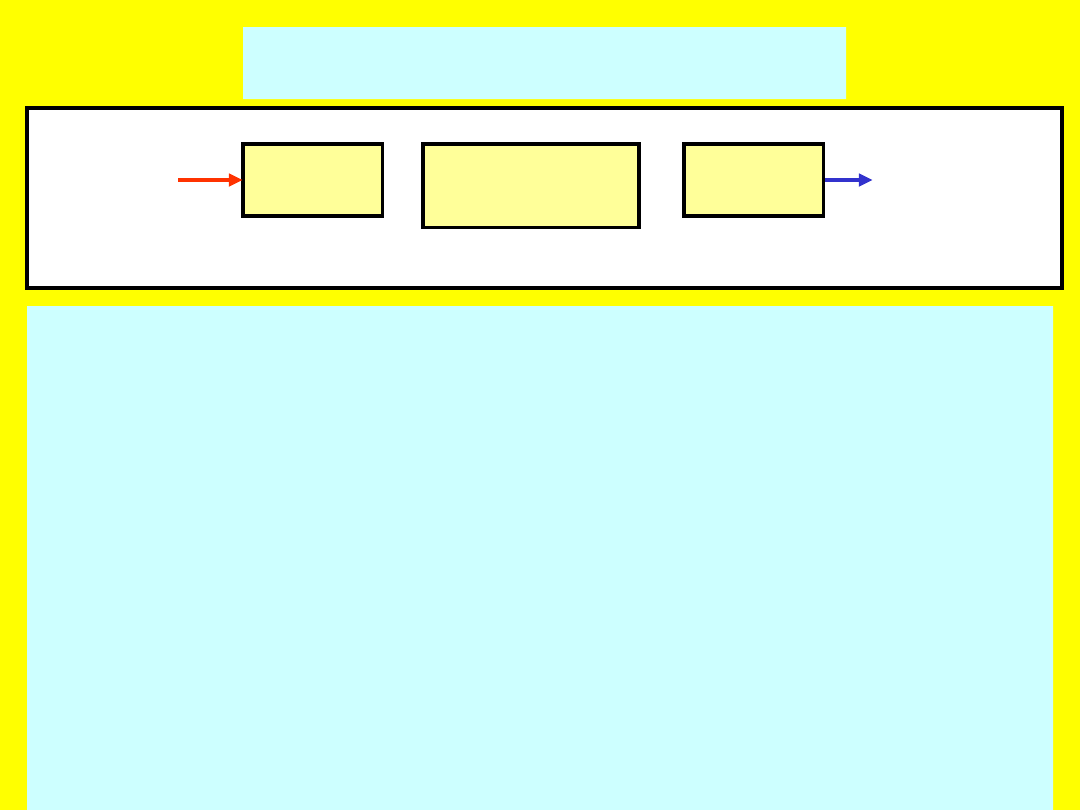
36
Komunikacja
Przetwornik komunikuje
się w sposób
akceptowaln
y i
zrozumiały
dla
systemu
bez konieczno
ści używania urządzeń
pośredniczących w
transmisji.
• Przetwarzanie
sygnału
z
analogowego
na
cyfrowy
- sposób
prymitywny
,
komunikacja
w
jednym kierunku
.
• Komunikacja
za pomocą
odpowiednich
protokołów systemowych
lub
adresowaniu
czujników
–
otrzymy-wanie
i
wysyłanie
sygnałów
.
SYGNAŁ
WYJŚCIOWY
odporny
na
zakłócenia
zewnętrzne
komunikacja
BODZIEC
ZEWNĘTRZNY
CZUJNIK
KOMPENSACJ
A
ZAKŁÓCEŃ
+
KOMUN
I
KACJA
+
RW
37
Autodiagnost
yka
Zdolność autodiagnostyki
posiadają
przetworniki
na
czwartym
poziomie
złożoności
.
Przetwornik
może
informować
system
–
sam
lub w
mo-mencie
odpytania
– że
ma
pewne
problemy
w
działaniu
.
Przetwornik
może
generować sygnał
wyjściowy
informu-jący
system
lub
operatora
o
uszkodzeniu
. Szczególne waż-
ne jest to w
przypadku
systemów
z
wieloma
czujnikami
.
SYGNAŁ
WYJŚCIOWY
odporny na
zakłócenia
zewnętrzne
komunikacja
sygnalizacja
uszko-
uszkodzeń
czujnika
CZUJ
NIK
KOMPEN-
SACJA
ZAKŁÓCEŃ
+
KOMUN
I
KACJA
+
DIASGN
OSTYKA
+
BODZIE
C
ZEWNĘ-
TRZNY
RW
38
Syg
n ał
wyjś
ciow
y
Sygnał wyjściowy
odporny na zakłócenia
zewnętrzne
CZUJ
NIK
KOMPEN-
SACJA
ZAKŁÓCEŃ
+
KOMUN
I
KACJA
+
•Komunikacja
•Sygnalizacja uszkodzodzeń
czujnika
•Bezpośrednie wykonywanie
operacji
DIASGN
OSTYKA
+
BODZIE
C
ZEWNĘ-
TRZNY
LOGIKA
STEROW
ANIE
+
Logika / Sterowanie
Dodanie do
struktury
przet-wornika
układów
logicznych
i
sterujących
(
mikrokontrolera
) powo-duje,
że
sensor
decyduje
jakie czyn-
ności i w jakiej
kolejności
wykonuje.
RW
39
Budowa prostą
-
fotoelektryczny
czujnik
z
wbudowaną
kartą logiczną
.
Budowa
bardziej
złożona
-
przetwornik wizyjny
mający
zdolność
porównywania
obrazów
zapisanych
w
pamięci
z
aktualnie
obserwowanym
w
celu
odróżnienia
elementów
dobrych
od
złych
. .
RW
40
Przetwornik
inteligentny
Przetworniki
posiadające
wszystkie
wymienione
zdolności
należą do
grupy przetworników
inteligentnych.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
Wyszukiwarka
Podobne podstrony:
Czujniki pomiarowe Budowa i zasada dzialania
Rodzaje i właściwości przetwoników do pomiaru naprężeń i przesunieć liniowych
4 Podstawy Metrologii przetworniki i czujniki
rodzaje i wlasciwosci przetwornikow do pomiaru temperatury
Labolatorium podstaw techniki światłowodowej, Światłowodowy czujnik pomiaru ciśnienia, Politechnika
rodzaje i wlasciwosci przetwornikow do pomiaru temperatury, Politechnika Łódzka Elektrotechnika, mag
2011 12 L II AiR st I st Przetworniki i Uklady Pomiaroweid 27401
Rodzaje i właściwości przetwoników do pomiaru naprężeń i przesunieć liniowych, Politechnika Łódzka E
czujniki pomiarowe
moroń,czujniki i pomiary wielkości nieelektrycznych, pomiary temperatur metodami stykowymi
2011 12 L II AiR st I st Przetworniki i Uklady Pomiarowe
1 Strona Laboratorium, Politechnika Opolska, IV semestr, Przetworniki i układy pomiarowe
czujniki pomiarowe, identyfikacja obiektu
Czujnik pomiaru prędkości
więcej podobnych podstron