Politechnika Poznańska Wydział Maszyn Roboczych i Transportu
Instytut Maszyn Roboczych i Pojazdów Samochodowych
Wykład 20
Systemy nawigacji satelitarnej
w zarządzaniu flotą pojazdów
dr inż. Michał Maciejewski
michal.maciejewski@put.poznan.pl
Systemy informacyjno-informatyczne
w transporcie

2
Plan wykładu
• Zarządzanie flotą pojazdów
• Poziomy zarządzania flotą
• Harmonogramowanie zadań
• Nawigacja flotą pojazdów
• TeleArtom

Zarządzanie flotą pojazdów
• Definicja
– proces logistyczny dotyczący środków transportu
– polega na alokacji i przepływie środków transportu,
zasobów ludzkich oraz innych zasobów w powiązaniu
z innymi procesami logistycznymi
– realizowany poprzez uporządkowany zbiór czynności
(planowanie, organizowanie, kierowanie i
kontrolowanie)
• Kryteria
– czas
– efektywność spełniania celów
– koszty
3

Zarządzanie flotą pojazdów
• Cel
– organizowanie działań mających na celu osiąganie
pożądanych wyników
– wykonywanie zadań przy optymalnym wykorzystaniu
floty
Do efektywnego zarządzania flotą niezbędne jest
stosowanie odpowiednich systemów
informatycznych
4

Zarządzanie flotą pojazdów
• Dyspozytor
– osoba odpowiedzialna za zarządzanie flotą w
przedsiębiorstwie transportowym
– planowanie i organizowanie zadań dla kierowców
– kontrola pracy kierowców
– zbieranie informacji o wykonanych zadaniach
– określanie statusu wykonania zadań (również
prognozowanie)
– planowanie przerw konserwacyjnych i serwisowych
– koordynacja działań w nieprzewidzianych sytuacjach
(zdarzenia losowe)
Najtrudniejszym i najistotniejszym zadaniem jest
tworzenie harmonogramów pracy kierowców oraz
przydziału pojazdów
5

6
Plan wykładu
• Zarządzanie flotą pojazdów
• Poziomy zarządzania flotą
• Harmonogramowanie zadań
• Nawigacja flotą pojazdów
• TeleArtom

Poziomy zarządzania flotą
• Czynności związane z zarządzaniem flotą
pojazdów można sklasyfikować wg 4 poniższych
poziomów:
– strategiczny
– taktyczny
– operacyjny
– czasu rzeczywistego
• Każdy poziom cechuje się długością horyzontu
czasu efektów podejmowanych decyzji
7

Poziomy zarządzania flotą
• Poziom strategiczny
– decyzje dotyczą dużych części firm
– mają istotny wpływ na finanse
– cechują się długofalowymi efektami (long-term effects)
– mają wpływ na decyzje podjęte na pozostałych
(niższych) poziomach
Przykłady:
– rozmiar i różnorodność floty pojazdów i wyposażenia
– typ oraz różnorodność oferowanych usług
transportowych
– zasięg terytorialny, rozmieszczenie terminali
przeładunkowych
– strategiczne alianse i kooperacje, włączając integracje
systemów informatycznych
8

Poziomy zarządzania flotą
• Poziom taktyczny
– decyzje dotyczą okresów krótko- i średniofalowych
okresów
– określanie sposobów efektywnego wykorzystania
zasobów
– dotyczą organizowania działalności zgodnie z celami
strategicznymi
– mają istotny wpływ na finanse
Przykłady:
– nabywanie i wymiana pojazdów/wyposażenia
– dostosowywanie pojemności floty do prognoz
– ustalanie polityki cenowej
– kontraktowywanie usług
– przypisanie (długoterminowe) kierowców do pojazdów
– analiza kosztów i efektywności
9
Poziomy zarządzania flotą
• Poziom operacyjny
– decyzje dotyczą krótkiego okresu: dziś-na-dziś, dziś-
na-jutro
– planowanie czynności na dzień następny (aktualny)
w odpowiedzi na napływające zlecenia, dostępność
pojazdów i możliwości kierowców
– może uwzględniać krótkoterminowe prognozy
Przykłady:
– zbieranie zleceń
– przydział zleceń do pojazdów
– przydział (krótkoterminowy) kierowców do pojazdów
– raportowanie
– fakturowanie
10

Poziomy zarządzania flotą
• Poziom czasu rzeczywistego
– działanie w trybie „natychmiastowym” w odpowiedzi
na nieprzewidziane zdarzenia lub zmienne zjawiska
– celem jest podjecie szybkiej decyzji w momencie
zauważenia rozbieżności pomiędzy planami a
aktualnym stanem realizacji zadań przewozowych
Przykłady:
– zbieranie zleceń
– przydział zleceń do pojazdów
– zmiana tras przejazdów
– komunikacja z kierowcami
– monitorowanie stanu procesów transportowych oraz
wykonania zadań
– estymacja/prognozowanie czasów wykonania zadań
11

12
Plan wykładu
• Zarządzanie flotą pojazdów
• Poziomy zarządzania flotą
• Harmonogramowanie zadań
• Nawigacja flotą pojazdów
• TeleArtom
Harmonogramowanie zadań
• Kryteria przydziału zadań do pojazdów
– Własności fizyczne
13
Wymagania
transportowe
Pojazdy
Typ ładunku:
kontener, paleta, towary
ponadgabarytowe, płyny
Typ pojazdu:
pojazd przegubowy,
ciągnik
siodłowy z naczepą, pojazd
o dużej wadze
Wielkości:
szerokość, wysokość,
długość,
masa, objętość
Wielkość powierzchni
transportowej:
szerokość, wysokość,
długość
pojemność, dopuszczalny
ciężar
Harmonogramowanie zadań
• Kryteria przydziału zadań do pojazdów
– Własności geograficzne
14
Wymagania
transportowe
Pojazdy
Miejsca załadunku,
dostawy, serwisu
Aktualna pozycja pojazdu
Ograniczenia drogowe
Ograniczenia drogowe
Harmonogramowanie zadań
• Kryteria przydziału zadań do pojazdów
– Własności logiczne
15
Wymagania
transportowe
Pojazdy
Okna czasowe
Czas kursów
Dostępność czasowa
Godziny pracy kierowców
Ograniczenia w
konsolidacji (grupowaniu)
ładunków
Dostępność konsolidacji
ładunków
Wrażliwość na
temperatury
Jednostki chłodnicze lub
ogrzewające
Materiały niebezpieczne
Licencja na transport
niebezpiecznych
materiałów
Harmonogramowanie zadań
• Kryteria przydziału zadań do pojazdów
– Wymagania obsługi ładunków
16
Wymagania
transportowe
Pojazdy
Fizyczne i logiczne
własności ładunku
Pojazd umożliwiający
boczny załadunek
Wyposażenie w miejscach
załadunku i wyładunku
Dźwigi
Rampy hydrauliczne
Powierzchnie rolkowe
Harmonogramowanie zadań
• Kryteria przydziału zadań do pojazdów
– Przychód / koszt
17
Wymagania
transportowe
Pojazdy
Cena, jaką klient chce
zapłacić
Koszty związane z
dystansem do
przejechania
Kary pieniężne w
przypadku niewykonania
zadania
Koszty związane z czasem
oczekiwania
Koszty subkontraktowania
do zewnętrznych
przewoźników
Koszty eksploatacyjne
Koszty użytkowania dróg,
tuneli, promów

18
Plan wykładu
• Zarządzanie flotą pojazdów
• Poziomy zarządzania flotą
• Harmonogramowanie zadań
• Nawigacja flotą pojazdów
• TeleArtom

Nawigacja flotą pojazdów
• Systemy zarządzania flotą pojazdów oparte na
technologii GPS
– pozwalają nadzorować, kontrolować i optymalizować
pracę pojazdów
– urządzenia tego typu stosowane są przez firmy
transportowe, kurierskie, handlowe oraz
przedsiębiorstwa taksówkowe
– instalowane urządzenia pozwalają także na
przesylanie danych o:
• ilość spalanego paliwa
• miejsca tankowania paliwa
• prędkość jazdy pojazdu
• czasy postoju pojazdu
• czasu pracy kierowcy
• …
19

Wymagania
• Pozycjonowanie
– odbiornik GPS
• Komunikacja kierowca-dyspozytor
– terminal
– zestaw głośnomówiący
– kamera
• Rejestracja zdarzeń i systemy alarmowe
– czujniki
– urządzenia rejestrujące
– sterowniki
• Przesyłanie danych
– telefonia komórkowa (GPRS)
20
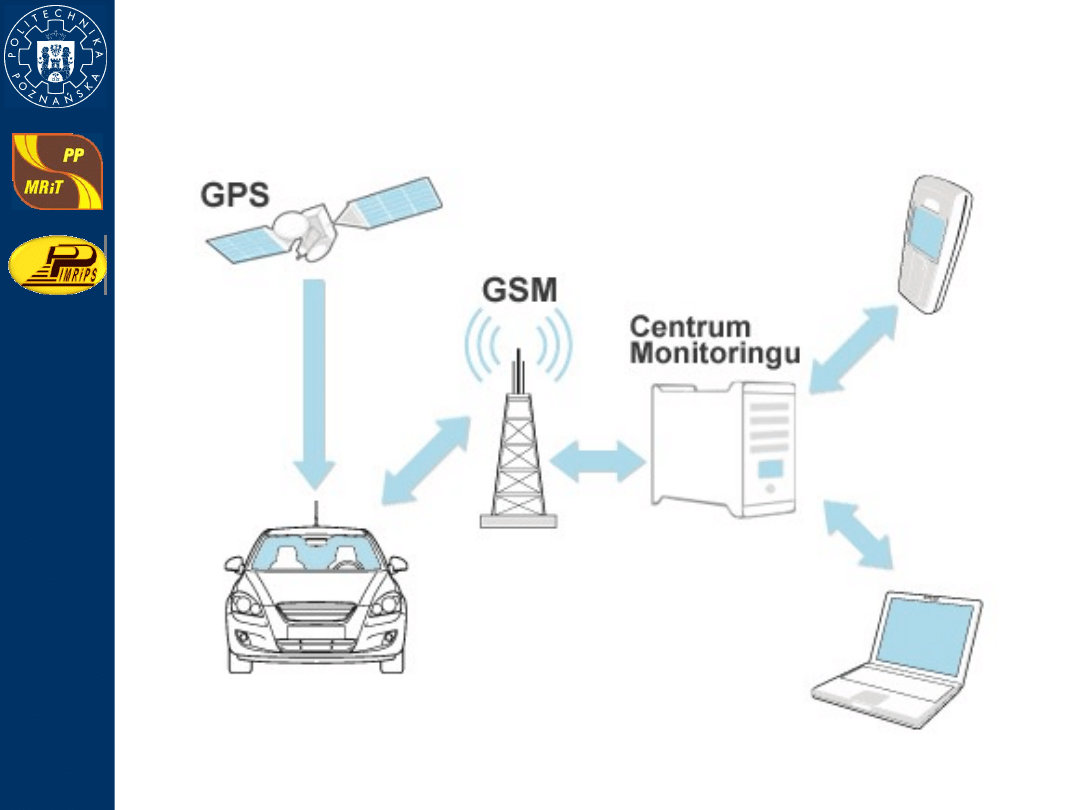
Struktura systemu
(AutoControl)
21

Funkcjonalność systemu (w skrócie)
• Lokalizacja i wizualizacja pojazdów na mapie w czasie
rzeczywistym
• Kontrola efektywności pracy pracowników oraz
wykorzystania pojazdów
• Monitoring parametrów technicznych pojazdu, urządzeń
dodatkowych oraz stanu przewożonego ładunku
• Ochrona pracownika i pojazdu
• Planowanie i optymalizacja tras
• Raportowanie wykonanych zadań
• Komunikacja dyspozytora z kierowcą
• Współpraca systemu z innymi systemami
informatycznymi
22

Funkcjonalność systemu
• Funkcje
– Lokalizacja i wizualizacja pojazdów na mapie w czasie
rzeczywistym
• ewidencja przebiegu tras i miejsc odwiedzonych
• śledzenie na bieżąco stanu ruchomych pojazdów wraz z
wizualizacją na mapie w czasie rzeczywistym
• zasięg krajowy lub międzynarodowy
• zbieranie informacji o zdarzeniach i przekazywanie do
uprawnionych osób, które mogą zapoznać się z danymi
poprzez połączenia sieciowe
– Kontrola efektywności pracy pracowników oraz
pojazdów
• kontrola liczby przejechanych kilometrów (możliwe
rozgraniczenie jazd służbowych i prywatnych), czasów
oraz prędkości w wybranych okresach, postojów
• analiza czasów jazdy, postoju, załadunku/wyładunku
(oraz jego miejsca)
23

Funkcjonalność systemu
• Funkcje
– Monitoring parametrów technicznych pojazdu,
urządzeń dodatkowych oraz stanu przewożonego
ładunku
• pozyskanie szczegółowych informacji dot. paliwa:
– zużycie paliwa
– miejsca tankowania
– raportowanie dużych/nagłych ubytków paliwa
• pobieranie parametrów z magistrali CAN
• nadzór nad stanem naczep, agregatów chłodnicznych:
– zamknięcia/otwarcia drzwi
– poprawność podłączenia naczepy
– …
• monitorowanie ładunku:
– wielkości fizyczne i chemiczne (np. temperatura,
ciśnienie, waga,…)
24

Funkcjonalność systemu
• Funkcje
– Ochrona pracownika i pojazdu
• przeciwdziałanie napadom i kradzieżom
• autoryzowanie kierowcy
– pastylki
– breloki
• alarmy antynapadowe uniemożliwiające:
– otwarcie drzwi przez osobę niepowołaną
– kradzież samochodu podczas postoju
• w przypadku nieplanowanej zmiany pozycji przesyłana
jest informacja do osób uprawnionych
25

Nawigacja flotą pojazdów
• Funkcje
– Planowanie i optymalizacja tras
• optymalne ustalenie kolejności odwiedzanych punktów
na trasie
• zbieranie danych o czasach przejazdu w celu ich
wykorzystania w przypadku planowania podobnych tras
• wybór typu tras:
– najszybsza
– najkrótsza
– najtańsza
• dla pojazdów na trasie możliwość dodawania miejsc
załadunku lub całkowitej zmiany kursu w przypadku
zmiany zlecenia lub wystąpienia nieprzewidzianych
utrudnień
26

Funkcjonalność systemu
• Funkcje
– Raportowanie wykonanych zadań
• efektywność personelu, pojazdów
• status wykonania zadań wraz z terminami i
załadunkami
• statystyka dla wybranych parametrów zbieranych z
pojazdów
– Komunikacja dyspozytora z pojazdem
• terminale komunikacyjne
• telefony + zestawy głośnomówiące
– Współpraca z innymi systemami informatycznymi
• systemy w danym przedsiebiorstwie
• systemy u kontrachentów
27

28
Plan wykładu
• Zarządzanie flotą pojazdów
• Poziomy zarządzania flotą
• Harmonogramowanie zadań
• Nawigacja flotą pojazdów
• Teleartom

Teleartom - monitorowanie
• Śledzenie i zarządzanie pojazdami (obiektami) w
czasie rzeczywistym, określenie pozycji pojazdów
na mapie (kontrola położenia, sytuacji, terminy
dotarcia do miejsc przeznaczenia, lokalizowanie
miejsc zdarzenia losowych),
• Określenie obszarów/tras wzorcowych, po których
mogą poruszać się pojazdy,
29
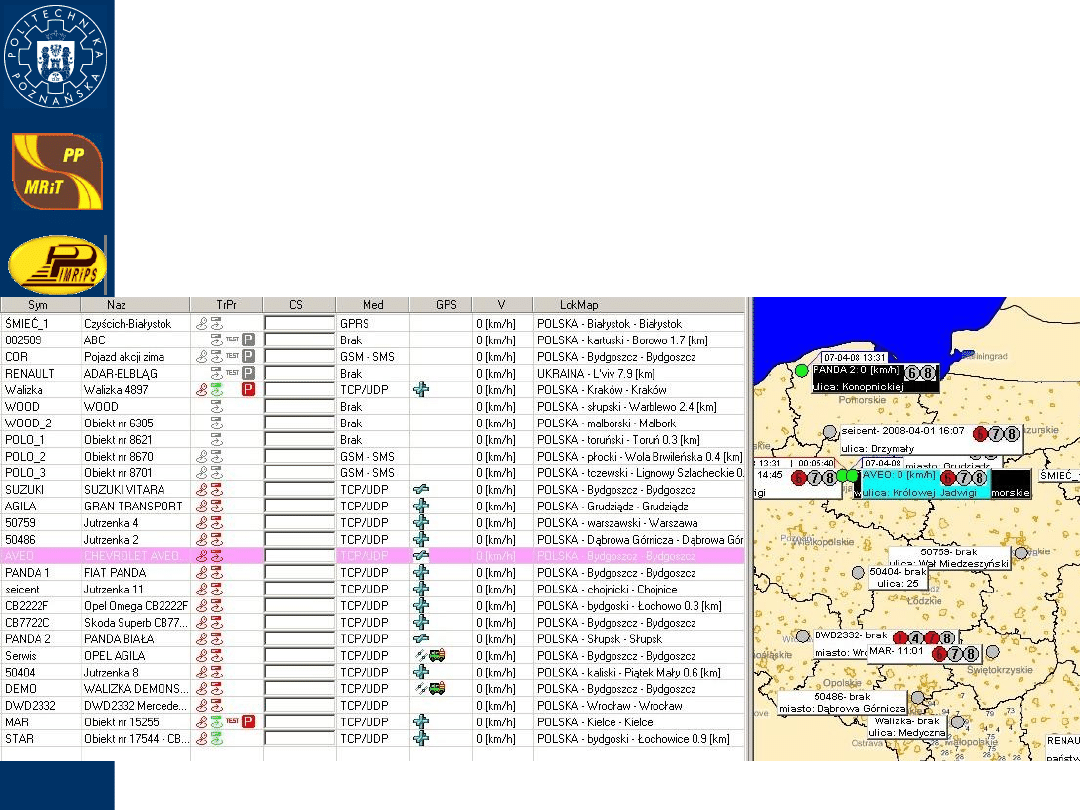
Teleartom - monitorowanie
• Wyświetlanie bieżącej pozycji, prędkości i
kierunku przemieszczania się obiektu na mapie
oraz w formie tabelarycznej
30
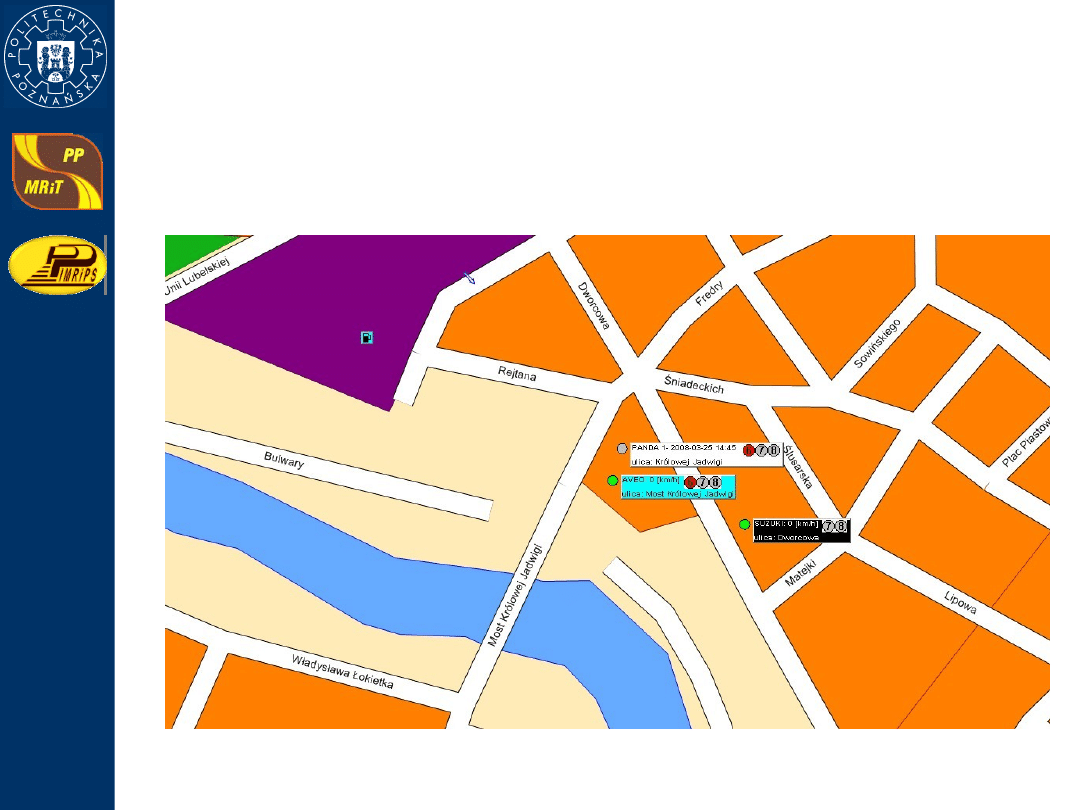
Teleartom - monitorowanie
• Lokalizacja i wizualizacja pojazdów na mapie
31
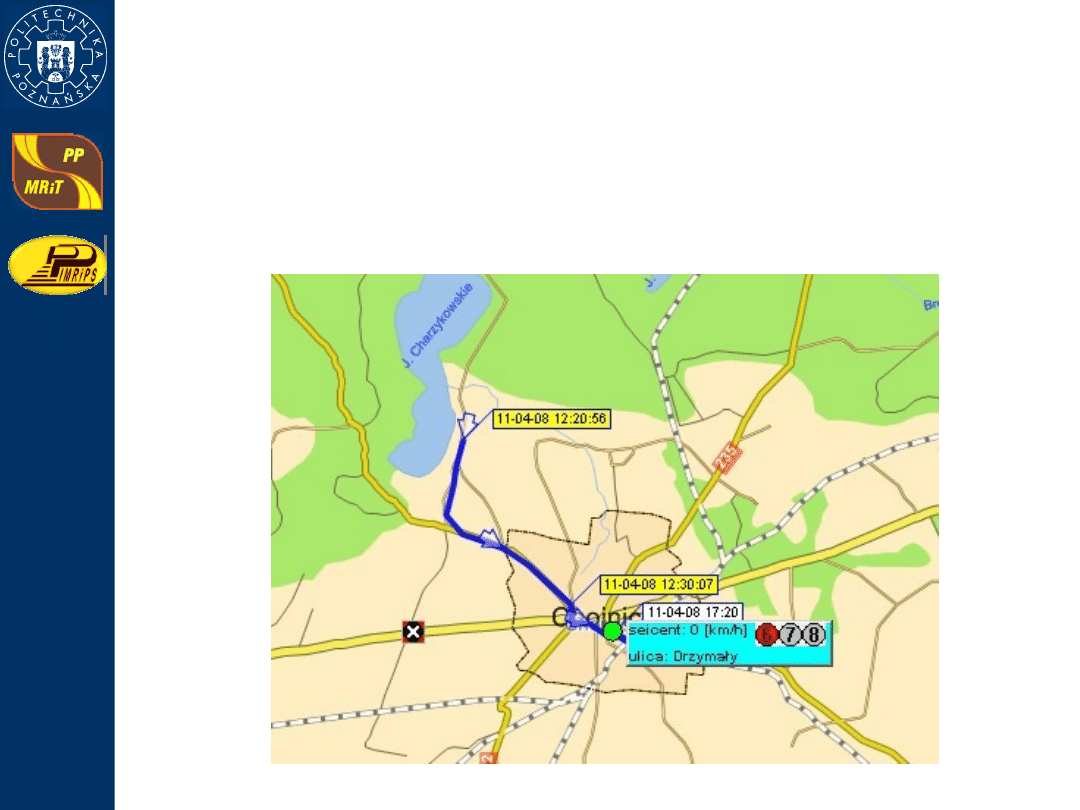
Teleartom - monitorowanie
• Wyświetlanie na bieżąco pokonywanej przez
pojazdy drogi
32

Teleartom - monitorowanie
• Obsługa map wektorowych, rastrowych,
skalowanie map, wyszukiwanie ulic, miejscowości
i punktów terenowych,
• Wyświetlenie na mapie lokalizacji tylko
wybranych (grupy) pojazdów przez użytkownika
(np. z danego regionu lub typu pojazdu -
osobowe/ciężarowe),
• Określenie przynależności obiektów w systemie
do konkretnej grupy pojazdów z graficznym
rozróżnieniem poszczególnych grup,
33
Teleartom - monitorowanie
• Możliwość transmisji obrazu z pojazdów za
pomocą GPRS oraz jego archiwizacja przy
wykorzystaniu dodatkowych elementów
wyposażenia pojazdu,
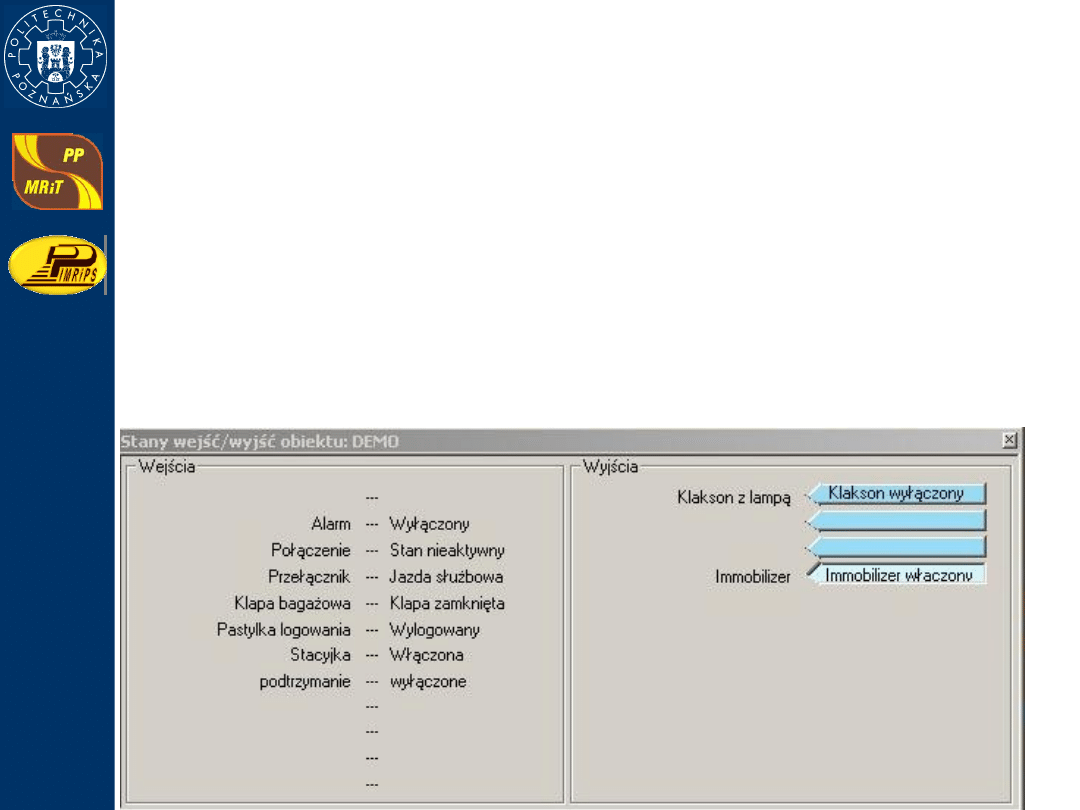
• Możliwość sterowania układami w pojeździe
podłączonymi do urządzenia pojazdowego GPS
(np. blokada zapłonu, klakson, światła itp.)
34

Teleartom - raportowanie
• Wskazanie określonego miejsca (np. zdarzenia
typu postój, ubytek paliwa, przekroczenie
prędkości itp.) na mapie
• Wykreślanie przebytej trasy na mapie za
zdefiniowany przez użytkownika okres
• Zestawienie zbiorcze dla grupy pojazdów za
wybrany okres
• Raporty dedykowane, sporządzane według
gotowych szablonów np. zestawienie przebiegów,
postojów, przekroczeń prędkości itp.
35
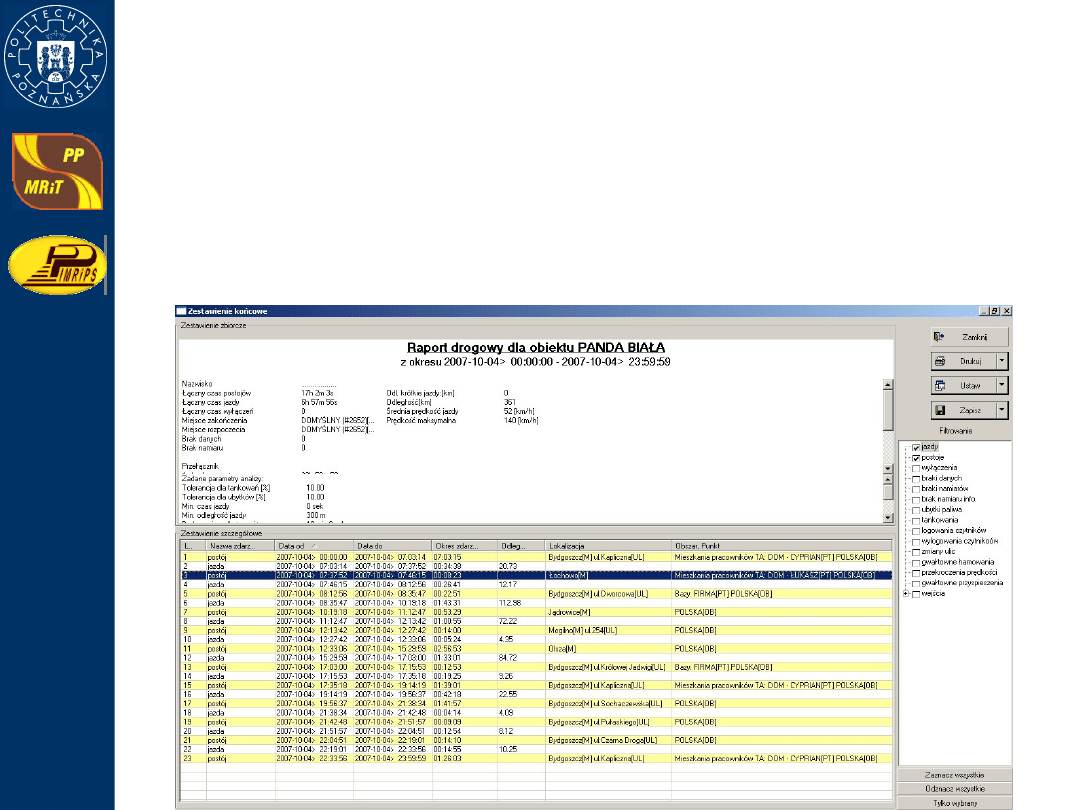
Teleartom - raportowanie
• Szczegółowy raport okresowego dla wybranego
pojazdu zawierającego chronologiczne
zestawienie pracy pojazdu z podsumowaniem i
możliwością filtrowania danych, które ma
zawierać raport
36
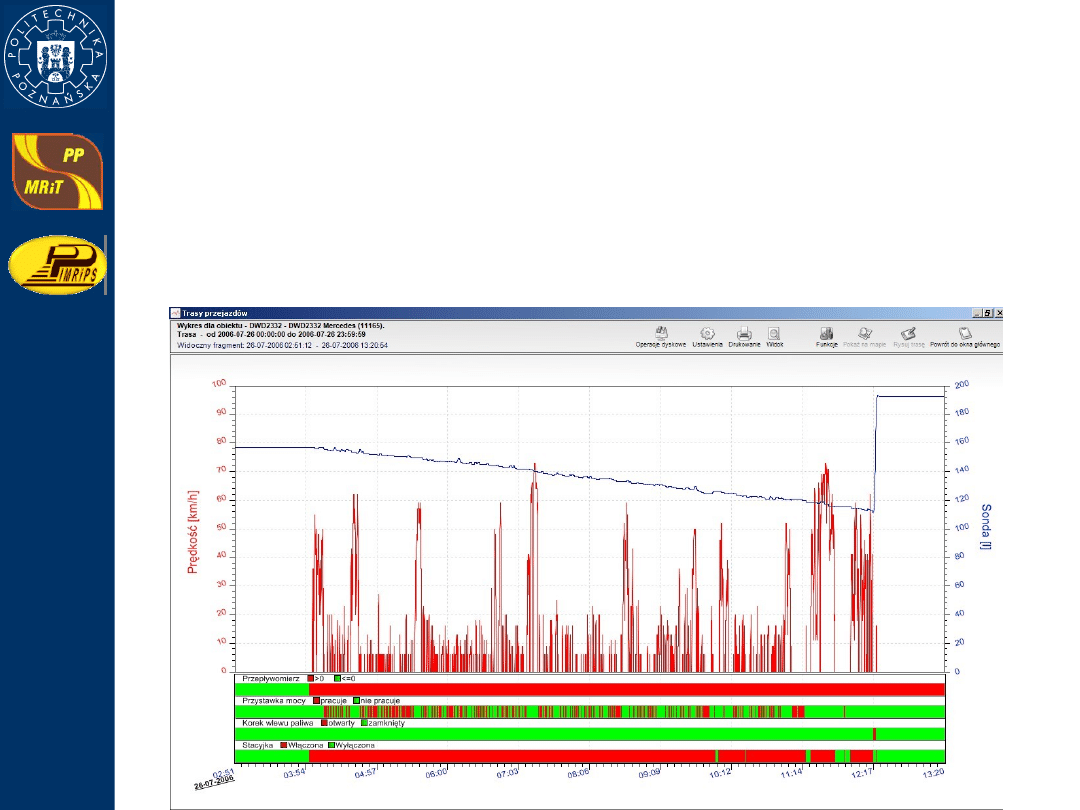
Teleartom - raportowanie
• Wykres zmian przedstawianej wielkości (np.
prędkości, zmian poziomu paliwa w zbiorniku itp.)
względem upływającego czasu lub przebytej drogi
37

Teleartom – kontrola paliwa
• Kontrola paliwa która w pojazdach realizowana
jest poprzez następujące urządzenia:
– sonda paliwa, która służy do pomiaru poziomu paliwa
w zbiorniku pojazdu,
– interfejs do czujnika paliwa umożliwia rejestrację
poziomu paliwa w baku
– czujnik otwarcia korka wlewu paliwa,
– przepływomierz elektroniczny umożliwia pomiar
ilości spalanego paliw w pojazdach,
38
Teleartom – kontrola
• Identyfikacja kierowców która realizowane jest
poprzez pastylki, kody, karty lub klucze kodowe
• Identyfikator naczepy realizowane za pomocą
chipu informującego jaka naczepa podpięta jest
do pojazdu
• Pomiar przebytej drogi
• Czujnik pracy osprzętu instalowany w pojazdach
w których istnieje konieczność kontroli urządzeń
dodatkowych
• Termometr oraz czujnik otwarcia
39

Teleartom - komunikacja
• Odbywa się za pomocą terminalu
komunikacyjnego.
• Terminal umożliwia realizację prostej i taniej
komunikacji za pomocą wiadomości tekstowych
pomiędzy kierowcą i biurem
• Rozwiązanie to umożliwia przydzielanie
odpowiednich zadań kierowcom w odpowiednim
czasie
40

Teleartom - bezpieczeństwo
• Przycisk anty-napadowy
• Bezprzewodowy zestaw radiowego pilota anty-
napadowego
• Alarmu samochodowego
• Mikrofon transmitujący głos z kabiny – podsłuch
• Kamery w pojeździe, za pomocą których można
przesyłać zdjęcia z pojazdu
41

42
Plan wykładu
• Zarządzanie flotą pojazdów
• Poziomy zarządzania flotą
• Harmonogramowanie zadań
• Nawigacja flotą pojazdów
• TeleArtom
• Porównanie systemów

Problem porównawczy
• Wielokryterialność problemu – u każdego
zainteresowanego podmiotu inaczej mogą kształtować
się preferencje odnośnie do funkcjonalności systemu, a
co za tym idzie – znaczenia poszczególnych opcji,
• Nieprecyzyjność i niekompletność ofert – oferty
systemów prezentowane na stronach WWW są często
niepełne i nieprecyzyjne,
• Nieporównywalność ofert – formy prezentacji
systemów przez poszczególnych producentów są bardzo
różne; systemy często mają podobne opcje, choć
różniące się w szczegółach i na podstawie ofert ciężko
dokonać oceny porównawczej, często opcje są w różny
sposób nazywane lub kategoryzowane,
• Niemożność oceny wygody użytkowania systemu, jego
niezawodności, bezpieczeństwa, jakości dokumentacji
oraz jakości obsługi ze strony dostawcy
43

Założenia
• Wybrane systemy
– TeleArtom
– GPS ATRAX-7
– AutoControl
– Flota-GPS
– Automonitoring
– SpaceGuard
– DataSystem (DS Locate, DS Flota)
– GPS Combo
• Punktacja
– 0 – brak funkcji,
– 1 – funkcja realizowana w zakresie częściowym,
– 2 – funkcja realizowana w zakresie rozszerzonym,
– 3 – funkcja realizowana w zakresie pełnym.
44

45

Koszty systemu
• Założenia
– flota 20 pojazdów
– okres 3 lat
– GPS
– sonda paliwa
46
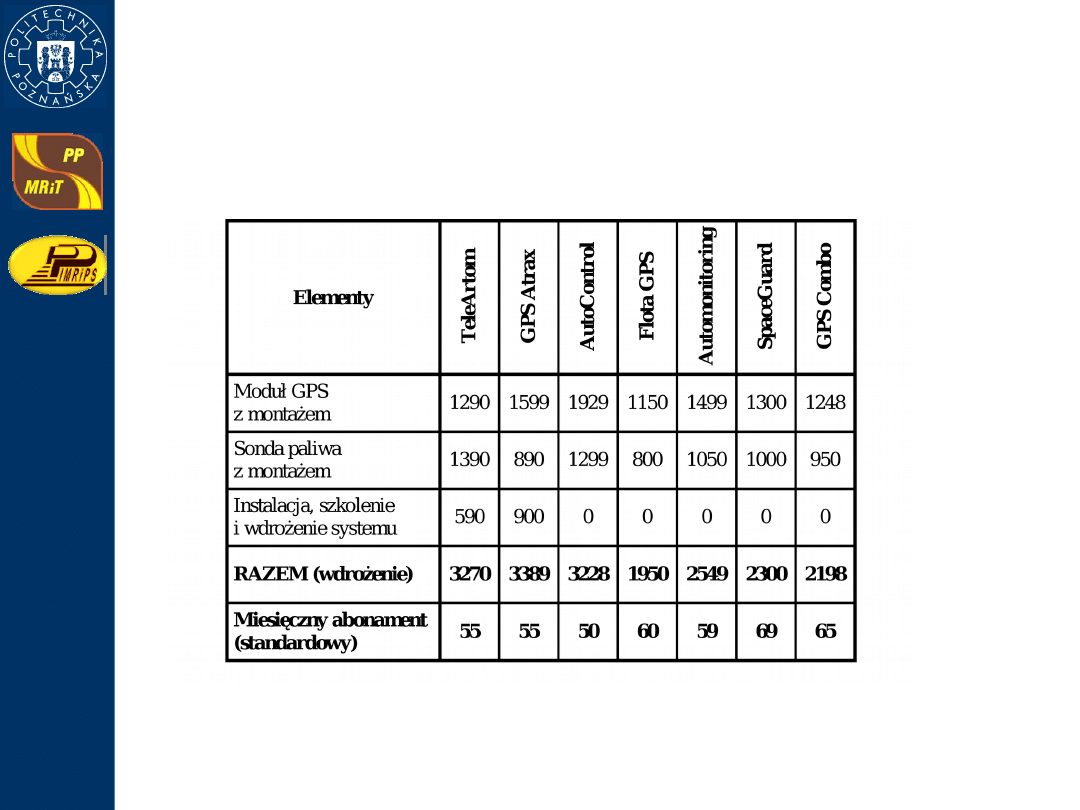
Koszty systemu
• W przeliczeniu na jeden pojazd (netto, PLN, 2009)
47
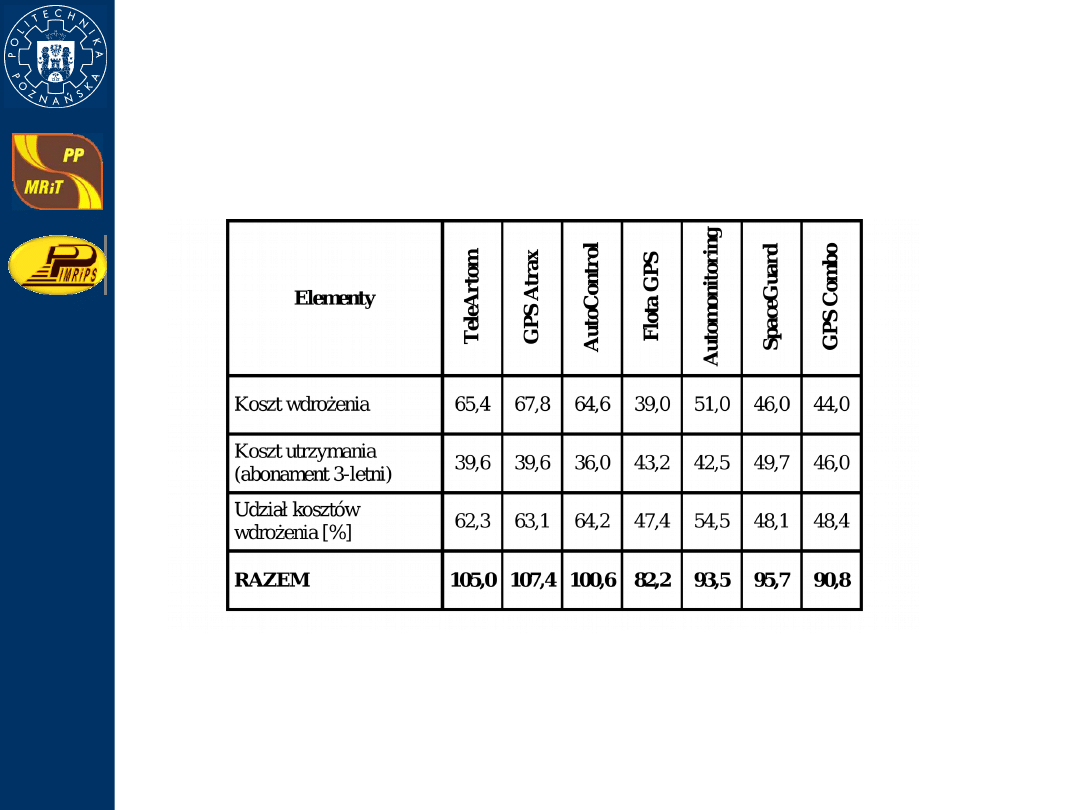
Koszty systemu
• Łączne koszty (netto, PLN, 2009)
48
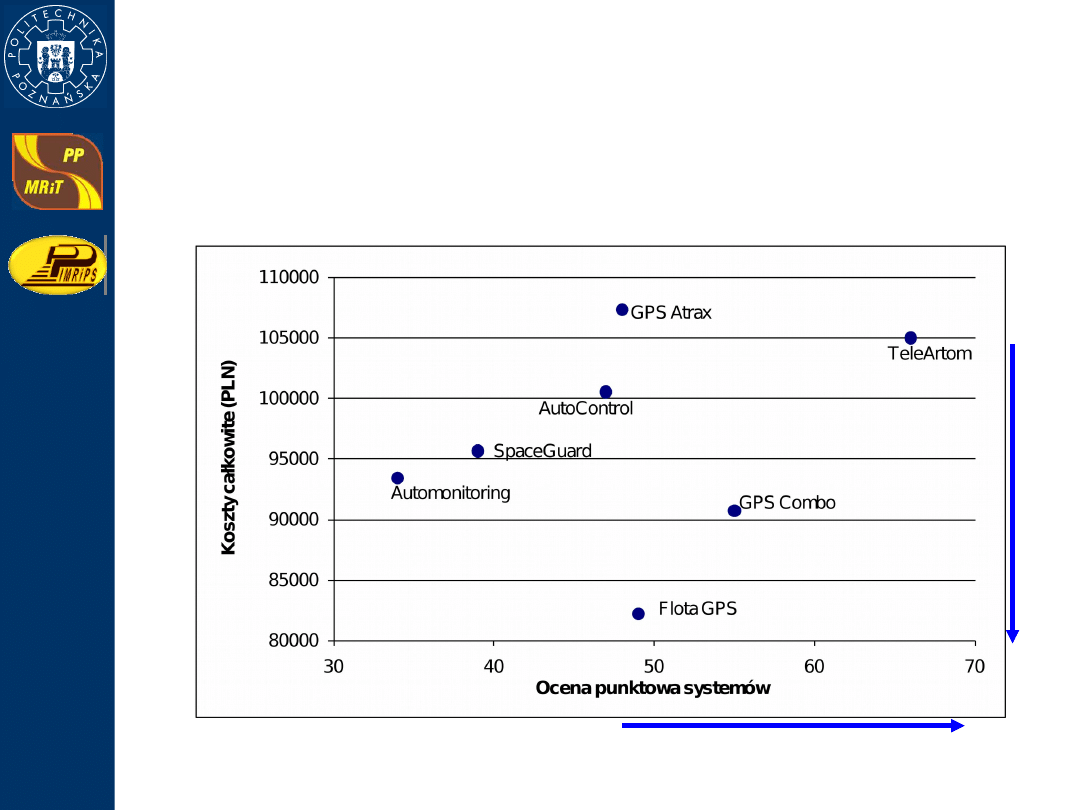
Ocena dwukryterialna
49
max
m
in
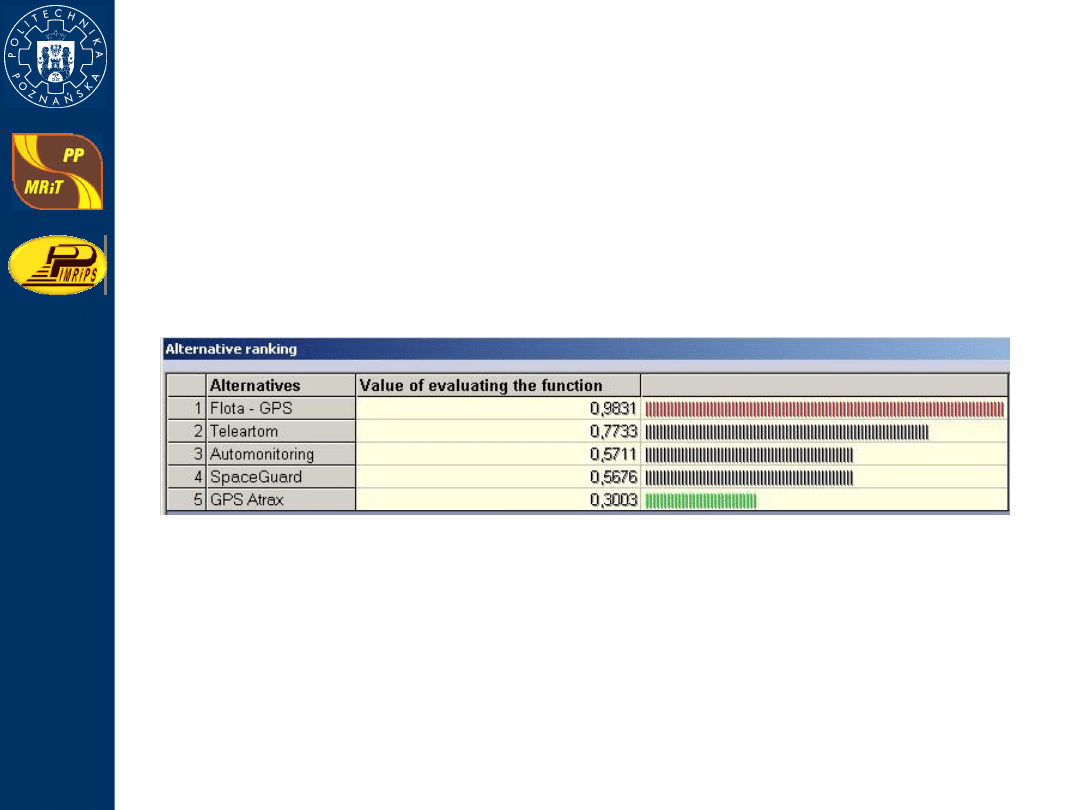
Ocena wielokryterialna
• metoda AHP (Analytic Hierarchy Process)
– MKA-2
– wyniki dla przykładowego zestawu wag podanego
przez decydenta
50

Podsumowanie
• Decyzja strategiczna, długoterminowa
– Nieporównywalność ofert
– Wielokryterialność zagadnienia
• Przegląd systemów
– kontakt z klientami
– dokumentacja ofertowa
– zestawienie punktowe
• Koszty systemu
– wdrożenie+utrzymanie
• Wybór systemu
– podejścia dwu- i wielokryterialne
51

52
Dziękuję…
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
Wyszukiwarka
Podobne podstrony:
2010 09 System nawigacji satelitarnej GPS
[Instrukcja obsługi] System nawigacji satelitarnej Naviexpert
System nawigacji satelitarnej GPS cz01
System nawigacji satelitarnej GPS cz12
System nawigacji satelitarnej GPS cz02
System nawigacji satelitarnej GPS cz04
System nawigacji satelitarnej GPS cz11
System nawigacji satelitarnej GPS cz07
System nawigacji satelitarnej GPS cz03
System nawigacji satelitarnej GPS cz08
System nawigacji satelitarnej GPS cz10
System nawigacji satelitarnej GPS cz06
System nawigacji satelitarnej GPS cz09
modelowanie systemu zarzadzania eksploatacją pojazdów
SII 19 Systemy inteligentnej nawigacji
INERCJALNY SYSTEM NAWIGACYJNY
SYSTEMY NAWIGACJI, Inne
ZNACZENIE SYSTEMU OCEN PRAC, Zarządzanie projektami, Zarządzanie(1)
więcej podobnych podstron