
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
1
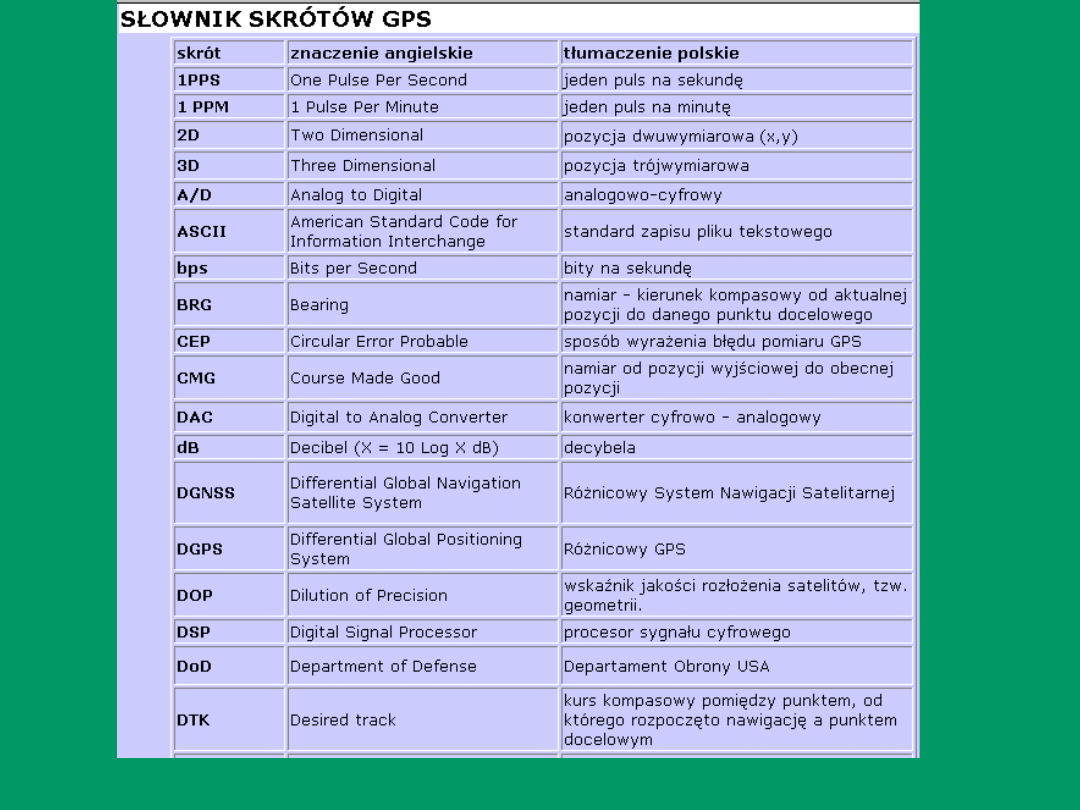
GPS
GPS
(Global Positioning System) - Globalny
System Wyznaczania Pozycji, System
Globalnego Pozycjonowania.
W
1973
roku Departament Obrony USA podjął
decyzję o połączeniu istniejących programów, w
celu stworzenia ogólnoświatowego, odpornego
na
warunki
pogodowe,
trójwymiarowego
systemu nawigacyjnego, nazwanego
Navstar
GPS
.
GPS jest własnością rządu Stanów
Zjednoczonych Ameryki. Korzystanie z systemu
GPS nie wymaga wnoszenia żadnych opłat.
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
2
GPS – c.d...
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
3
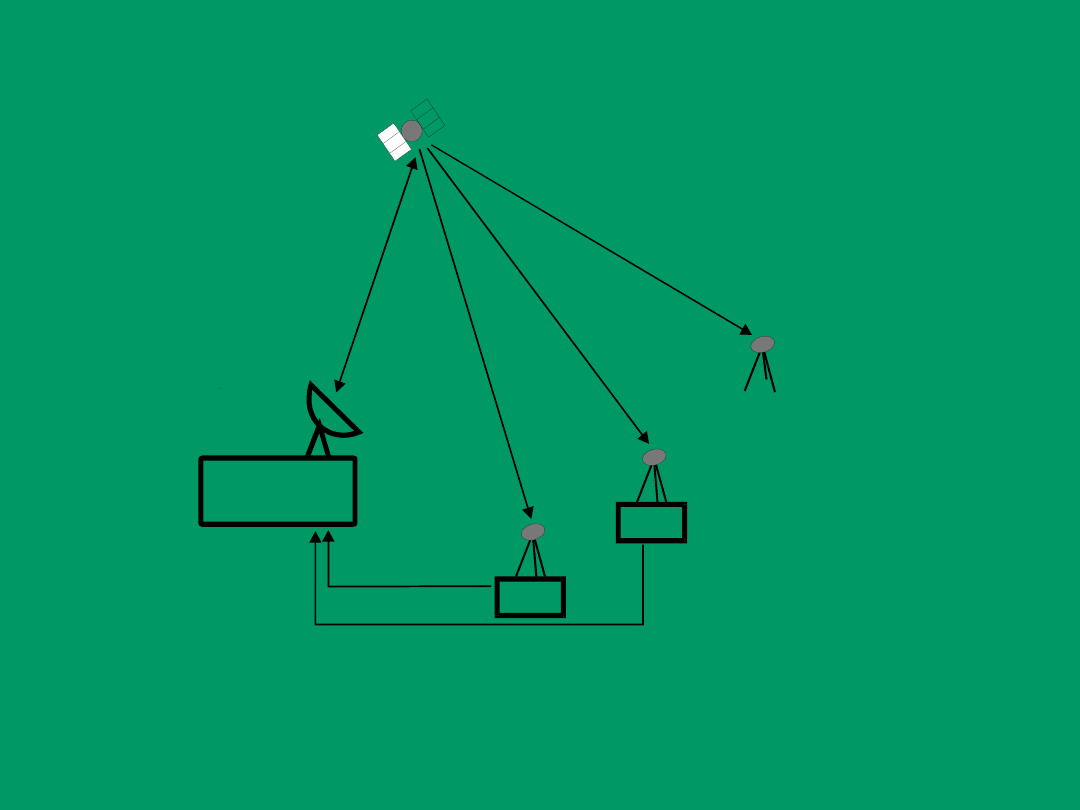
GPS – c.d...
C e n tr u m
k o n tr o li
s y s te m u
G P S
S ta c je
ś le d z ą c e
O d b io r n ik
u ż y tk o w n ik a
S a te lita

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
4
GPS - GLONASS
Podobny
system,
o
nazwie
GLONASS
,
uruchomiony został w Związku Radzieckim.
Pełna konstelacja satelitów GLONASS składa
się 24 obiektów rozmieszczonych na trzech
płaszczyznach orbitalnych Po skompletowaniu,
na początku 1996 roku, pełen zestaw satelitów
był dostępny przez okres około 40 dni. Pod
koniec roku 1996 na orbicie znajdowało się 21
aktywnych obiektów. Na każdej płaszczyźnie
powinno znajdować się 8 równomiernie
rozmieszczonych satelitów. Orbity są kołowe i
znajdują się na wysokości około 19100 km.
Okres obiegu wynosi 11h15m.
Obecnie liczba satelitów wchodzących w skład
systemu GLONASS jest o wiele mniejsza -
system sam w sobie nie zapewnia pełnej
operacyjności lecz jest idealny jako
uzupełnienie pomiarów GPS.

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
5
GPS - GLONASS
Kombinacja pomiarów z wykorzystaniem
satelitów GLONASS umożliwia widoczność
nawet o 30% satelitów więcej niż wykorzystując
tylko satelity GPS. Dzięki widoczności większej
liczby satelitów uzyskujemy większe
dokładności pomiarów oraz możliwość
wykonywania pomiarów w miejscach, gdzie ze
względu na zbyt małą liczbę obserwowanych
satelitów pomiary takie nie były możliwe.
Ze względu na to, iż system GLONASS różni się
wieloma parametrami z systemem GPS (np. ma
inne częstotliwości) istnieje bardzo mało
odbiorników pozwalających na pomiar przy
wykorzystaniu systemów GPS i GLONASS
jednocześnie. Tylko najnowsze i najbardziej
rozwinięte technologicznie urządzenia
umożliwiają współpracę tych dwóch systemów.

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
6
GPS – składowe systemu
System składa się z trzech grup elementów:
• część przekaźnikowa
- system 24 satelitów
umieszczonych na 6 okołoziemskich orbitach na
wysokości 20200 km nad powierzchnią Ziemi, z
których każdy transmituje informację czasową oraz
dane nawigacyjne. Czas obiegu orbit wynosi około 12
godzin, przy czym system został tak zaprojektowany,
że o każdej porze dnia i w każdym miejscu na Ziemi
można oczekiwać (z prawdopodobieństwem 99,96%)
dostępności sygnału od co najmniej 5 satelitów. Taka
konfiguracja umożliwia (z małymi wyjątkami)
wyznaczenie pozycji dowolnego miejsca na
powierzchni Ziemi o dowolnej porze dnia lub nocy. Na
niewielkich obszarach wyznaczenie pozycji jest
niemożliwe w okresie nie dłuższym niż około 20 minut
w ciągu doby.
• część naziemna
- Głównej Stacji Nadzoru (Master
Control Station w Bazie Sił Powietrznych Falcon w
Colorado Springs) i 5 lokalnych stacji monitorujących,
• część odbiorcza
- odbiorniki, którymi posługują się
użytkownicy systemu GPS.

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
7
GPS – poziomy dokładności
GPS zapewnia dwa poziomy dokładności:
• Dokładny Serwis Pozycyjny (PPS - Precise Positioning
Service)
• Standardowy Serwis Pozycyjny (SPS - Standard
Positioning Service).\
Dokładny serwis pozycyjny - PPS dostępny jest tylko dla
autoryzowanych użytkowników, zapewniając wysoką
dokładność danych o pozycji i czasie.
Do autoryzowanych użytkowników należą: Siły Zbrojne
USA i NATO (o autoryzacji użytkownika decyduje
Departament Obrony USA).

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
8
Dokładny serwis pozycyjny - PPS
PPS dostarcza informacji o pozycji z dokładnością nie
gorszą niż 16 metrów i informacji o czasie z
dokładnością nie gorszą niż 100 nanosekund w
stosunku do czasu UTC-USNO (Universal Coordinated
Time US Naval Observatory) .
PPS dostępny jest jedynie dla autoryzowanych
użytkowników i przeznaczony głównie dla celów
wojskowych. Do autoryzowanych użytkowników należą:
Siły Zbrojne USA i NATO. O autoryzacji użytkownika
decyduje Departament Obrony USA.
Dostęp do PPS kontrolowany jest dwiema metodami:
Ograniczony Dostęp (SA - Selective Availability)
Anti-spoofing (A-S)

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
9
Dokładny serwis pozycyjny - PPS
Ograniczony Dostęp
(SA - Selective Availability) -
pozwala na zmniejszenie dokładności pozycji i czasu
dostępnych dla nieautoryzowanych użytkowników. SA
działa poprzez wprowadzanie kontrolowanych błędów
do sygnałów satelity i depeszy satelitarnej.
Departament Obrony zadeklarował, iż w czasie pokoju
SA zmniejszy dokładność pozycji dla użytkowników SPS
do 100 metrów (95%, 2D).
SA zostało wyłączone decyzją prezydenta USA z dniem
01.05.2000 r.
Anti-spoofing
(A-S) - jest włączany bez ostrzeżenia by
uniemożliwić imitowanie sygnałów PPS przez
nieprzyjaciela. Technika ta zmienia kod, szyfrując go.
Klucz do szyfru dostępny jest wyłącznie autoryzowanym
użytkownikom. W ten sposób uzyskują oni maksymalną
dostępną dokładność.

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
10
Standardowy serwis pozycyjny -
SPS
Standardowy serwis pozycyjny dostarcza informacji o
pozycji z dokładnością nie gorszą niż 100 metrów
(95%,2D) w rozwiązaniach dwuwymiarowych i 156
metrów (95%,3D) w rozwiązaniach trójwymiarowych.
Dokładność informacji o czasie określona jest na nie
gorszą niz. 337 nanosekund (95%) w stosunku do skali
UTC(USNO). SPS przeznaczony jest głównie dla
użytkowników cywilnych.
Sztucznie wprowadzone i niektóre naturalne
ograniczenia dokładności mogą być w dużym stopniu
wyeliminowane przy użyciu technik różnicowych.
Techniki te polegają na wykorzystaniu poprawek
wyznaczanych przez precyzyjnie zlokalizowane
odbiorniki, zwane stacjami referencyjnymi. Poprawki
różnicowe mogą być wprowadzane po pomiarze, lub w
czasie rzeczywistym, w tym ostatnim wypadku do ich
transmisji wykorzystuje się łącza radiowe.
Obecnie upowszechnione są już systemy dystrybucji
poprawek różnicowych z pokładu satelitów
komunikacyjnych.

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
11
GPS – c.d...
Zespół satelitów stanowi przestrzenny ruchomy
układ odniesienia wspólny dla całego globu
ziemskiego.
Specjalnie dobrane parametry orbit zapewniają
warunek widoczności
minimum pięciu
satelitów
ponad horyzontem w dowolnym
momencie i w każdym miejscu na Ziemi, co jest
niezbędne do pełnego (przestrzennego)
wyznaczenia położenia anteny odbiornika GPS.
Każdy z satelitów emituje dwa sygnały.
System GPS zapewnia dokładności pomiaru
rzędu kilkunastu metrów. Poprzez
wykorzystanie systemów wspomagających
EGNOS/WAAS
lub
OmniStar
dokładności te mogą być rzędu 1 metra.

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
12
Systemy wspomagania pomiarów GPS
System EGNOS
(European Geostationary Navigation
Overlay Service) został zaprojektowany, aby zwiększyć
dokładność pomiaru pozycji wyznaczanej technikami
GPS.
Na system EGNOS składają się stacje odbiorczo-
kontrolne i satelity geostacjonarne. Zadaniem stacji
odbiorczych jest odbieranie sygnałów z satelitów GPS
oraz obliczenie różnicy pomiędzy znaną pozycją stacji
odbiorczej, a pozycją obliczoną na podstawie
odebranych sygnałów GPS.
Korekcja pozycji przesyłana jest do satelitów
geostacjonarnych, które z kolei transmitują ją w
kierunku Ziemi.
System WAAS
jest amerykańskim odpowiednikiem
technologii satelitarnej transmisji poprawki różnicowej
dla odbiorników GPS. Korekcja jest posyłana z satelitów
geostacjonarnych wprost do anten odbiorników GPS
(tylko specjalnie do tej funkcji przygotowanych, tzn.
"WAAS ready"). Dokładność pozycji wykazywanej przez
odbiornik po uwzględnieniu poprawki WAAS/EGNOS
wynosi ok. 1-2 m.
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
13
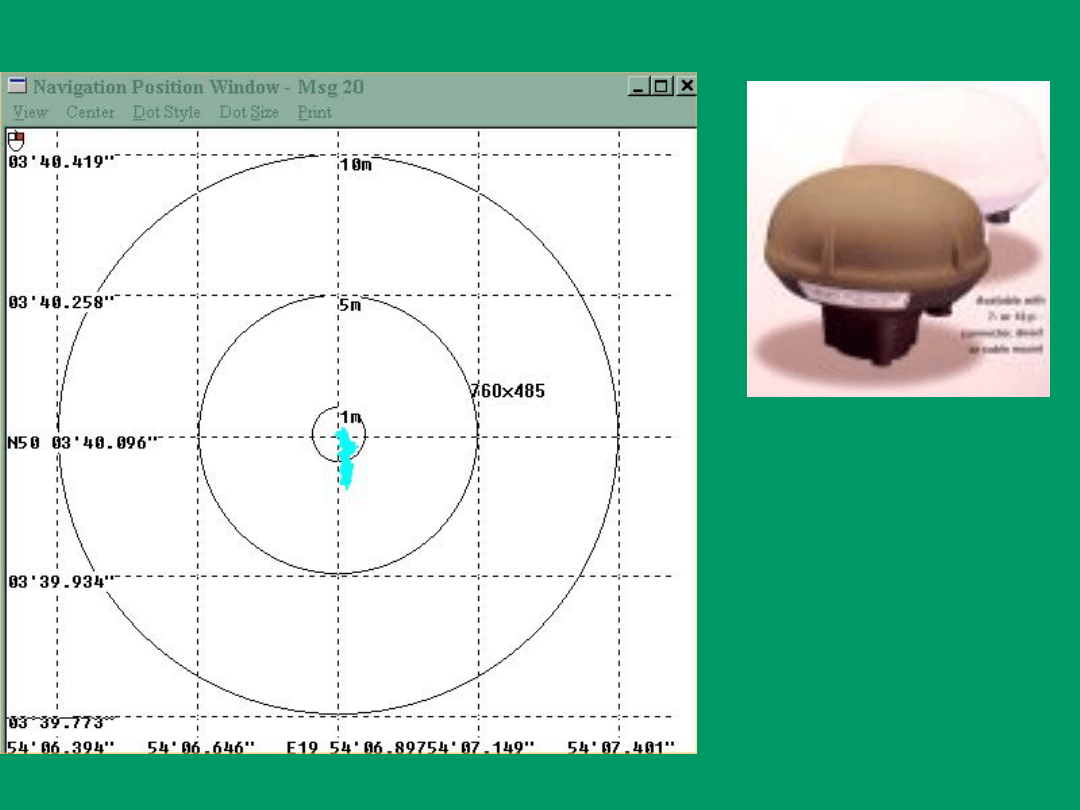
Systemy wspomagania GPS - EGNOS
W ciągu kilkunastu
minut pracy na
stałym punkcie
współrzędne nie
wykroczyły poza
okrąg o średnicy
2 metrów.
Cena – ok. 10 tys.
$

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
14
Systemy wspomagania pomiarów GPS
System OmniStar
działa na zasadzie podobnej
co systemy EGNOS.
Różnica polega na tym, że jest on systemem o
ogólnoświatowym zasięgu i korzystanie z niego
jest płatne.
System, po wykupieniu subskrypcji, pozwala na
uzyskiwanie dokładności GPS poniżej 1 metra.

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
15
GPS – wyznaczanie pozycji
Każdy z satelitów wyposażony jest w zespół atomowych
wzorców częstotliwości generujący lokalną skalę
czasu. Jej zasadniczą cechą jest stabilność. Parametry
satelitarnych
skal
czasu
i
parametry
orbit
satelitarnych wyznaczane są przez Naziemne Centra
Śledzące. Informacje te przesyłane są na pokłady
satelitów celem dalszej retransmisji do użytkowników
systemu.
Struktura sygnału satelitarnego umożliwia odbiornikowi
wyznaczenie czasu jaki upłynął od momentu wysłania
sygnału do momentu odbioru i określenie w ten
sposób odległości pomiędzy użytkownikiem a satelitą.
Dane nawigacyjne służą odbiornikowi do określenia
położenia satelity w momencie nadawania sygnału.
Odległości do satelitów i ich współrzędne są
wystarczającymi danymi do wyznaczenia położenia
odbiornika.
Dla trójwymiarowego określenia położenia odbiornika
potrzebne są dane z czterech satelitów
, ponieważ
oprócz trzech współrzędnych wyznaczyć należy
również poprawkę zegara odbiornika.

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
16
GPS – metody pomiarów
Wyznaczenie pozycji anteny odbiornika może odbywać
się w dwojaki sposób:
• na zasadzie pomiarów absolutnych
• w sposób różnicowy
Absolutne
wyznaczenie
współrzędnych
przestrzennych
odbywa się na zasadzie rejestracji
jednym odbiornikiem sygnałów pochodzących z
minimum czterech satelitów.
Ze względu na duży wpływ środowiska na właściwości
propagacji fal radiowych (jonosfera, troposfera,
sygnały odbite), niedokładności parametrów orbit
satelitów wyznaczane tą metodą współrzędne osiągają
dokładność od kilku do kilkunastu metrów
.
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
17
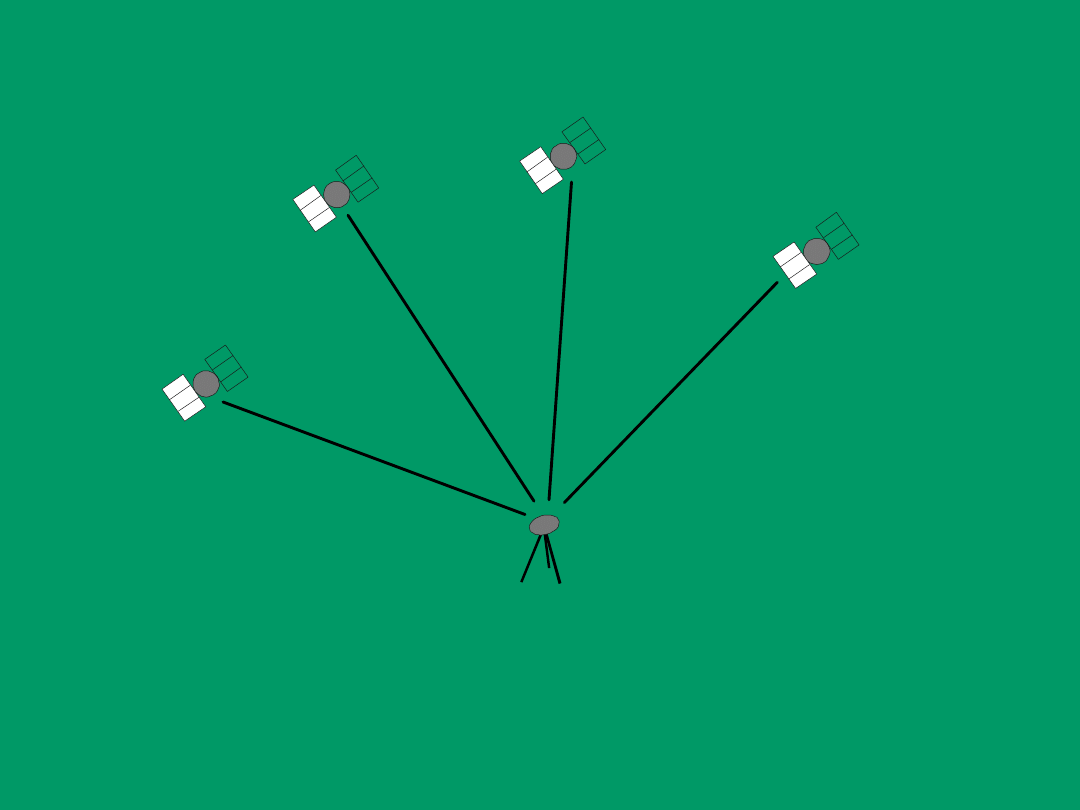
Metoda bezwzględnego pomiaru GPS –
c.d...
Bezwzględne wyznaczenie przestrzennej pozycji anteny
odbiornika GPS
X
,
Y
,
H
=
?

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
18
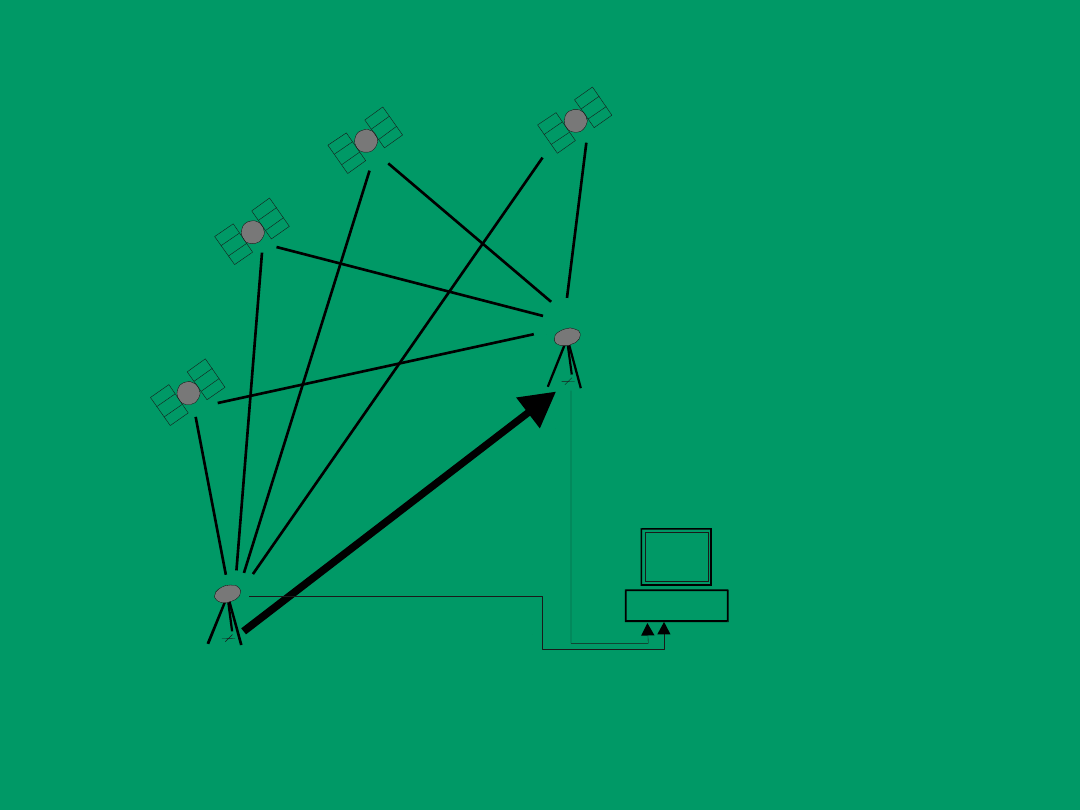
Metoda różnicowego pomiaru GPS –
c.d...
Metoda różnicowa
wymaga synchronicznych obserwacji
przy zastosowaniu co najmniej dwóch odbiorników
GPS, gdzie jeden z nich traktowany jest jako
stacja
bazowa
zaś drugi – jako
stacja ruchoma
.
Wymagane jest, aby dla stacji bazowej znane były
współrzędne przestrzenne wyznaczone w tym samym
układzie odniesienia, w którym funkcjonuje system
GPS. W tym przypadku wyznaczane są różnice
współrzędnych
pomiędzy
stacją
bazową
a
odbiornikiem ruchomym. Ze względu na niewielkie
odległości (do 500 km) pomiędzy odbiornikami w
stosunku do odległości satelitów od powierzchni Ziemi
przyjmuje się, że sygnały docierające do obydwu anten
przechodzą przez jednorodne środowisko. Założenie to
pozwala usunąć w procesie obliczeniowym prawie cały
wpływ wspomnianych źródeł błędów na wyznaczane
pozycje anteny odbiornika ruchomego.
Wyznaczane tą drogą współrzędne względne osiągają
dokładności rzędu od
1 m do kilku milimetrów
(w
zależności od typu odbiorników i stosowanych metod
pomiarowych).
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
19
Metoda różnicowego pomiaru GPS –
c.d...
Metoda różnicowa wyznaczenia pozycji (wektora)
Z
n
a
n
e
:
X
,
Y
,
H
X
,
Y
,
H
=
?

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
20
GPS – metody pomiarów
Zależnie od stosowanej techniki przetwarzania
sygnału
i
danych,
rezultaty
pomiarów
wykonywanych z wykorzystaniem sygnałów
satelitów GPS charakteryzują się różną
dokładnością i dostępnością. Najważniejsze z
kategorii cywilnych
zastosowań GPS to:
Nawigacja w czasie rzeczywistym
Pomiary geodezyjne Static, Fast Static
Pomiary geodezyjne Kinematic, Stop & Go
Real Time Kinematic
Inne technologie

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
21
GPS – metody pomiarów
Nawigacja w czasie rzeczywistym
Wyznaczanie w czasie rzeczywistym pozycji
obiektów lądowych, morskich, lotniczych,
kosmicznych. Czas trwania pomiaru jest
bardzo krótki, zazwyczaj nie przekracza
sekundy, typowa dokładność jest rzędu
kilkudziesięciu metrów, przy wykorzystaniu
technik
różnicowych
osiąga
wielkości
submetrowe.
Uzyskane
informacje
wykorzystywane mogą być między innymi dla
potrzeb nawigacyjnych, w systemach nadzoru
ruchu obiektów.

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
22
GPS – metody pomiarów
Pomiary geodezyjne Static, Fast Static
Dla potrzeb geodezyjnych wyznacza się wektory
o długościach do kilkuset kilometrów, przy
dokładności pomiaru długości wektora rzędu
kilku milimetrów. Pomiar taki wykonuje się
przy użyciu pary odbiorników, czas wykonania
pomiaru wynosi, zależnie od odległości
pomiędzy
odbiornikami
i
warunków
widoczności satelitów, do kilkudziesięciu
minut. Pomiary wykonywane techniką GPS
stanowią istotną konkurencję dla pomiarów
geodezyjnych
wykonywanych
metodami
tradycyjnymi a przy tworzeniu sieci wyższego
rzędu są regułą ze względu na dokładność i
niskie koszty.

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
23
GPS – metody pomiarów
Pomiary geodezyjne Kinematic, Stop & Go
W pomiarach tego typu wykorzystuje się fakt, iż
przemieszczenia anteny odbiornika GPS, nie
tracącej kontaktu z sygnałami satelitarnymi
mogą być natychmiast wyznaczone z dużą
dokładnością.
Rozpoczynając
pomiar
od
punktu o znanych współrzędnych, możemy
wyznaczać pozycje kolejnych punktów z
dokładnością centymetrową, z czasem pobytu
na punkcie rzędu sekund. Zasadniczą różnicą,
istotną
dla
użytkownika
przy
wyborze
odpowiedniego typu urządzenia, jest sposób
inicjalizacji
pomiarów
kinematycznych.
Odbiorniki dwu-częstotliwościowe mogą być
inicjalizowane
w
locie
(On-The-Fly),
w
praktyce oznacza to, iż odbiornik może
rozpoczynać i kontynuować pracę w trybie
kinematycznym bez potrzeby umieszczania
anteny na punkcie o znanych współrzędnych.

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
24
GPS – metody pomiarów
Real Time Kinematic
Jest to najbardziej zaawansowana technologia
różnicowa. Wymaga łącza radiowego o dużej
szybkości, jednak umożliwia wyznaczanie
pozycji w czasie rzeczywistym z dokładnością
centymetrową. Jej zasięg ograniczony jest do
promienia kilkunastu kilometrów od stacji
bazowej.
Inne technologie
Powyższy przegląd nie wyczerpuje wszystkich
możliwości cywilnego wykorzystania systemu
GPS. Często, specyficzne warunki wykonania
pomiaru
umożliwiają
uzyskanie
dużych
dokładności, nietypowych dla danej techniki.
Stosunkowo łatwe w realizacji jest np. ciągłe
wyznaczanie
przemieszczeń
budowli,
konstrukcji inżynierskich z dokładnością
milimetrową, z częstotliwością rzędu kilku lub
kilkunastu Hz.
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
25
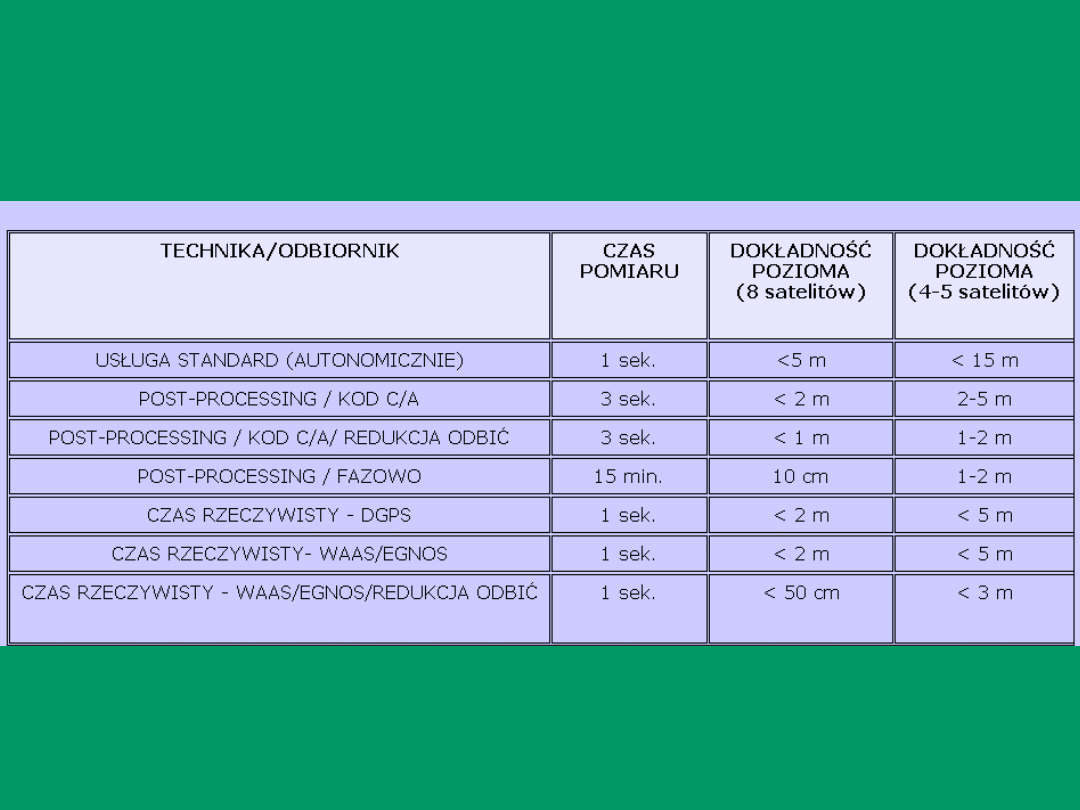
Techniki pomiaru i oferowane
dokładności
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
26

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
27
GPS – na co zwracać uwagę przy
pomiarach?
1. Przed przystąpieniem do prac terenowych z
wykorzystaniem odbiorników GPS należy zaplanować
sesje pomiarowe. Na dokładność wyznaczanych
współrzędnych bardzo istotny wpływ (poza czynnikami
środowiskowymi,
np.:
warstwy
atmosfery,
przesłonięcie horyzontu, fale odbite) mają:
liczba i
konstelacja satelitów
. Ponieważ satelity GPS
poruszają się po swych orbitach, ich rozmieszczenie
na nieboskłonie ulega ciągłej zmianie.
2. Liczba i rozmieszczenie satelitów na nieboskłonie
(wsp.
PDOP
)
3. Moc odbieranego sygnału GPS (wsp.
SNR
)
4. Wysokość i zwarcie drzewostanu, a szczególnie
występowanie w bezpośrednim sąsiedztwie dużych pni
drzew
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
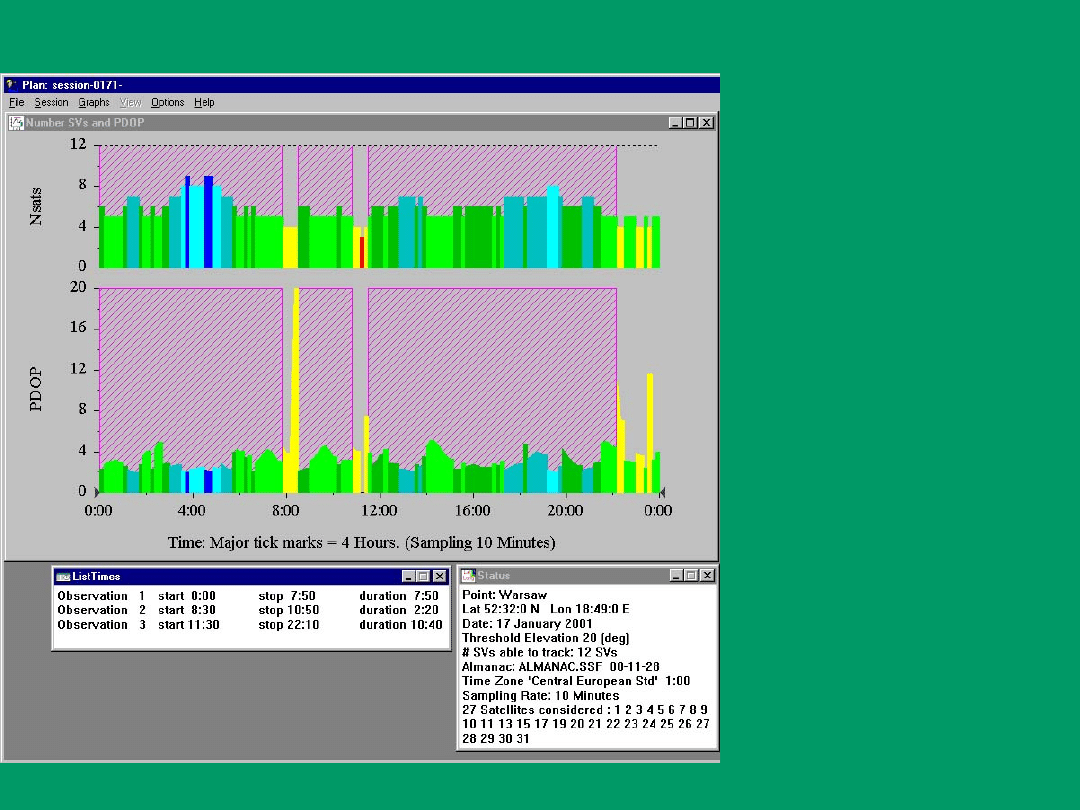
28
GPS – na co zwracać uwagę przy
pomiarach?
•
mmiejsce pomiaru:
Polska
•
lliczba satelitów:
min 5
•
mmaska
horyzontalna: 20
o
•
wwspółczynnik
PDOP: < 8
Przykład
zaplanowanej
sesji pomiarowej
dla Warszawy,
dnia
17.01.2001 r.

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
29
Pomiary geodezyjne, GPS
Elementy zestawu umożliwiającego pomiar odległości z
dokładnością
3-5 cm oraz pozycji geograficznej z
dokładnością około 1 m
Pathfinder Pro XRS
dalmierz
laserowy
Impulse 200
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
30
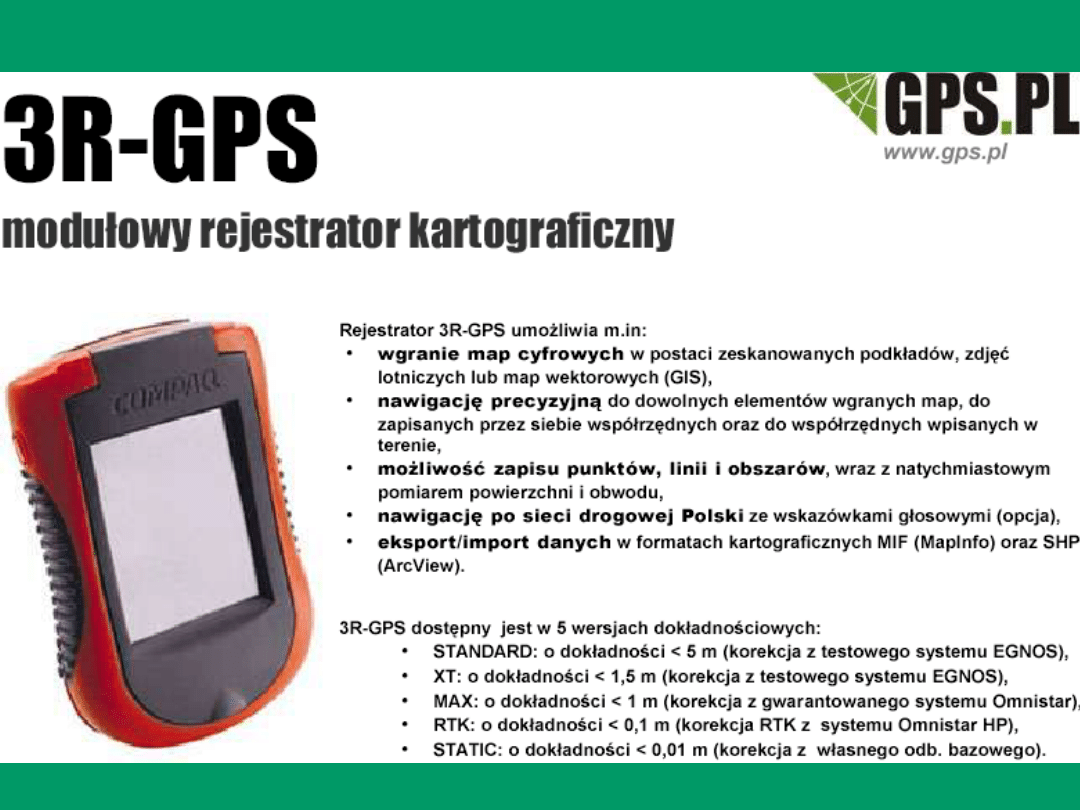
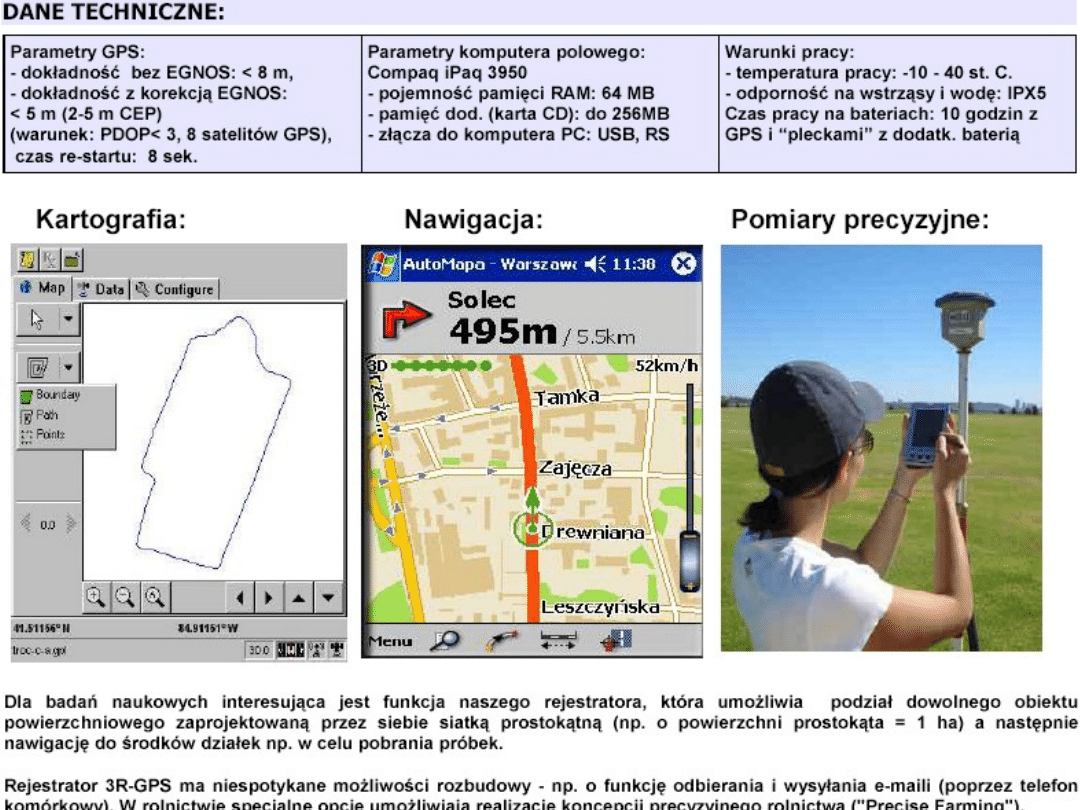
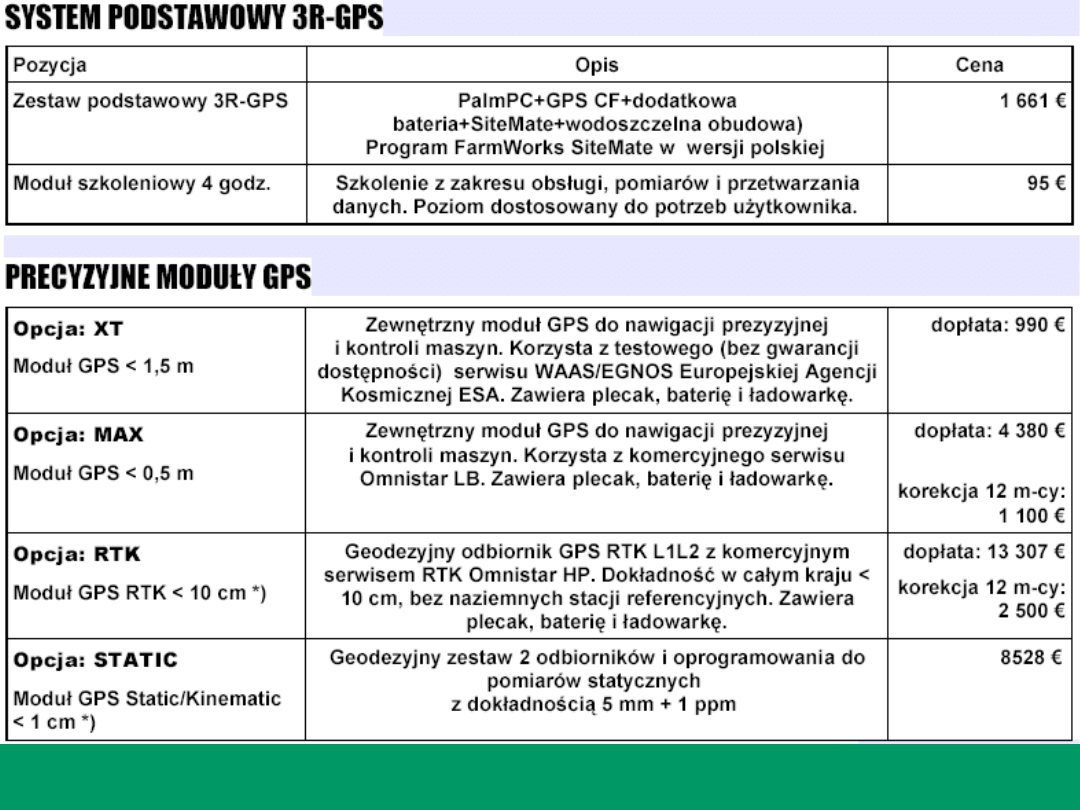
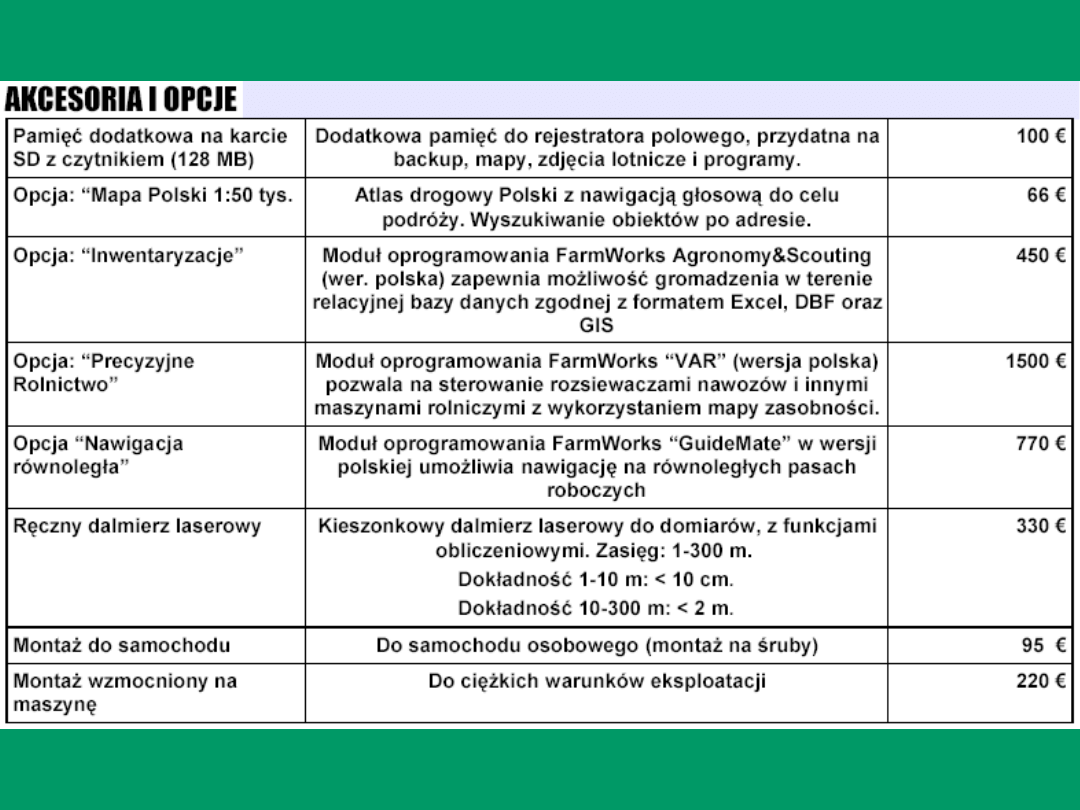
3R-GPS zestaw do aktualizacji LMN
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
31
3R-GPS zestaw do aktualizacji LMN
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
32
3R-GPS zestaw do aktualizacji LMN
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
33
3R-GPS zestaw do aktualizacji LMN
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
34
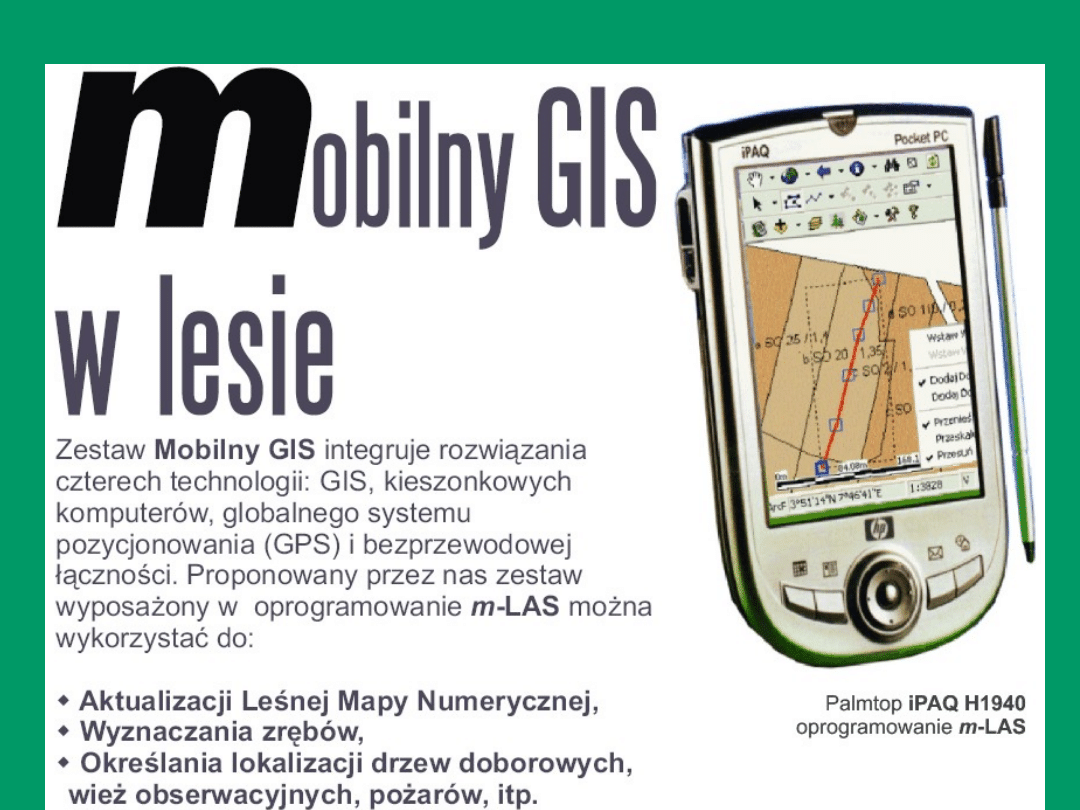
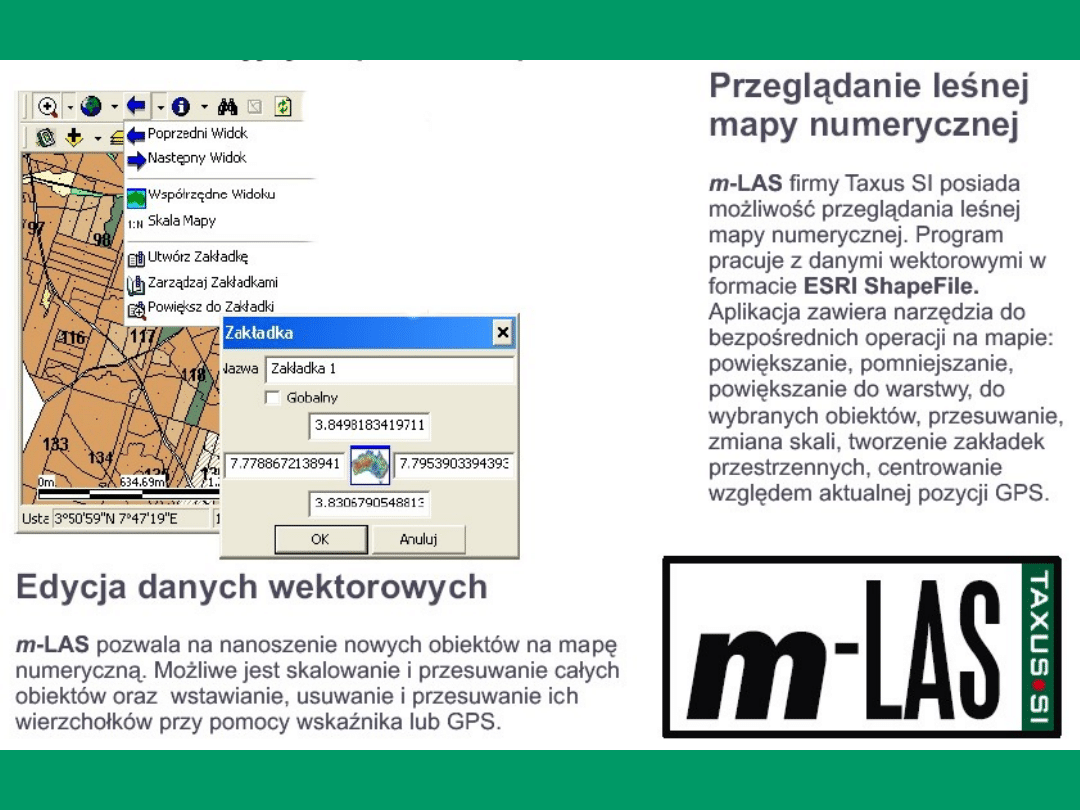
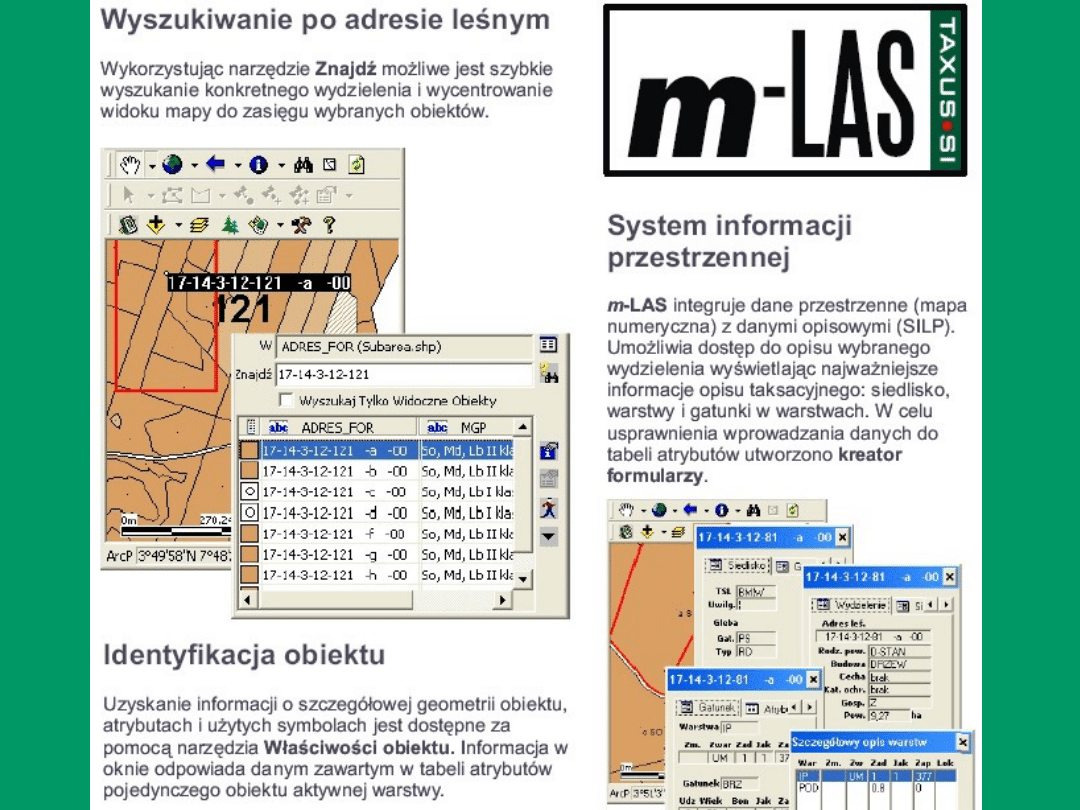
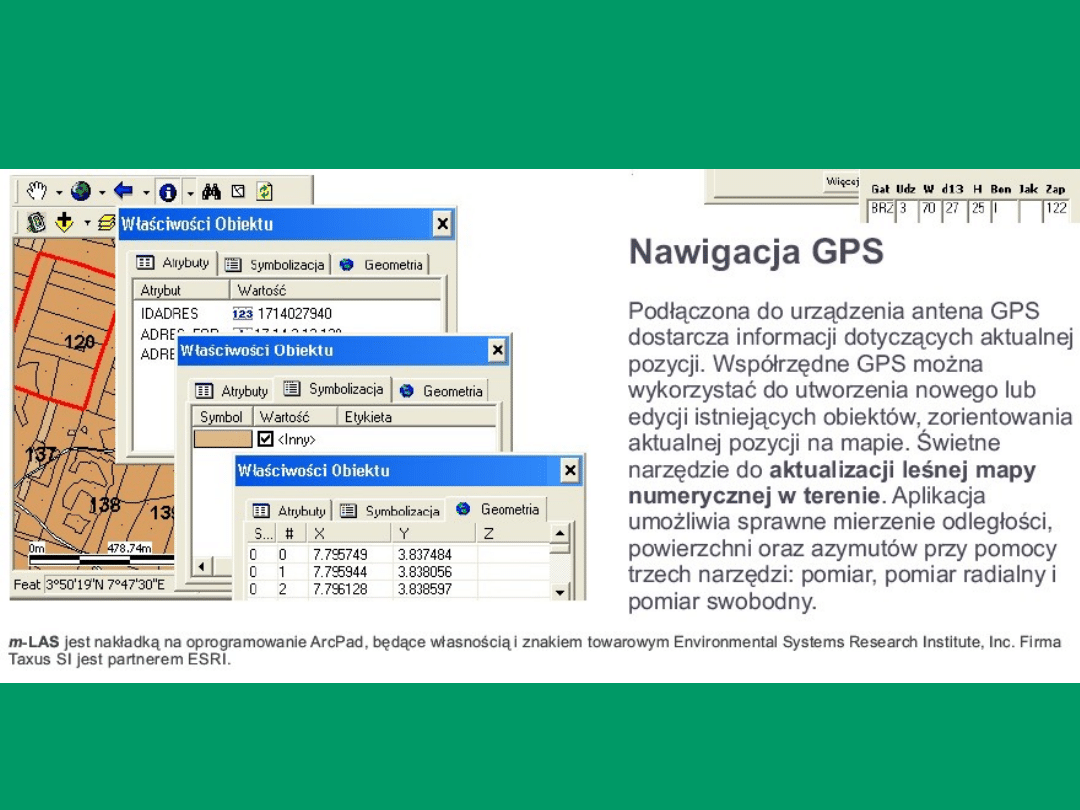
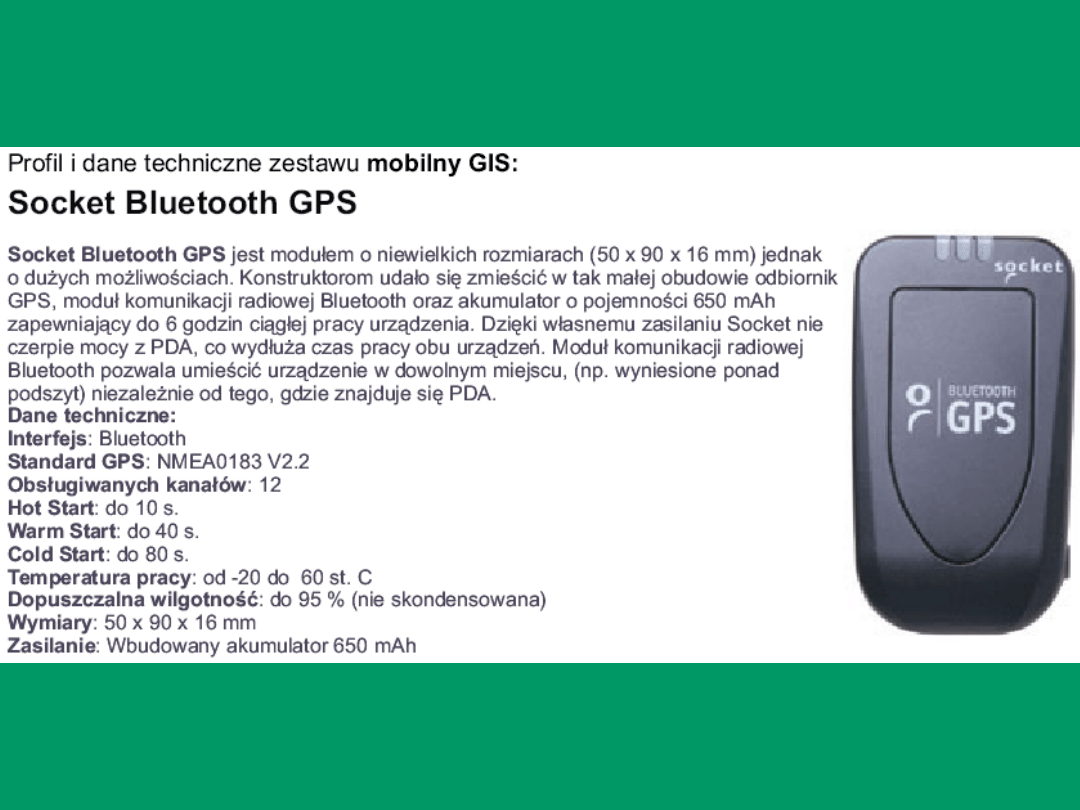
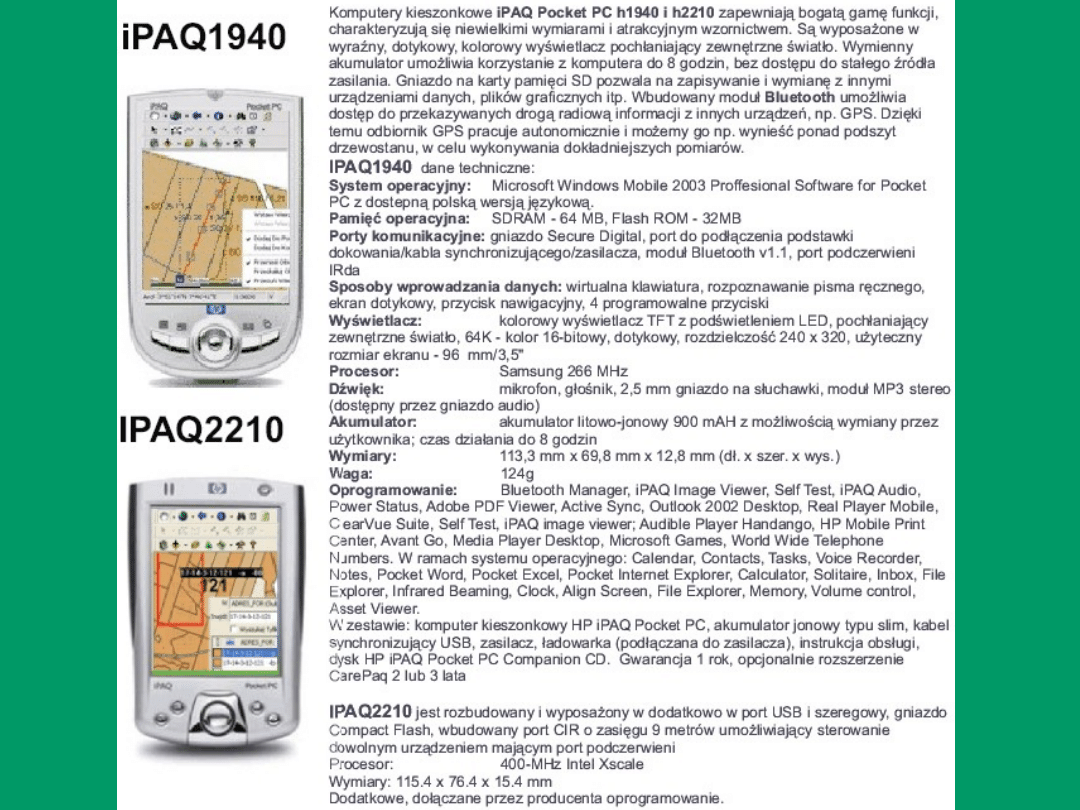
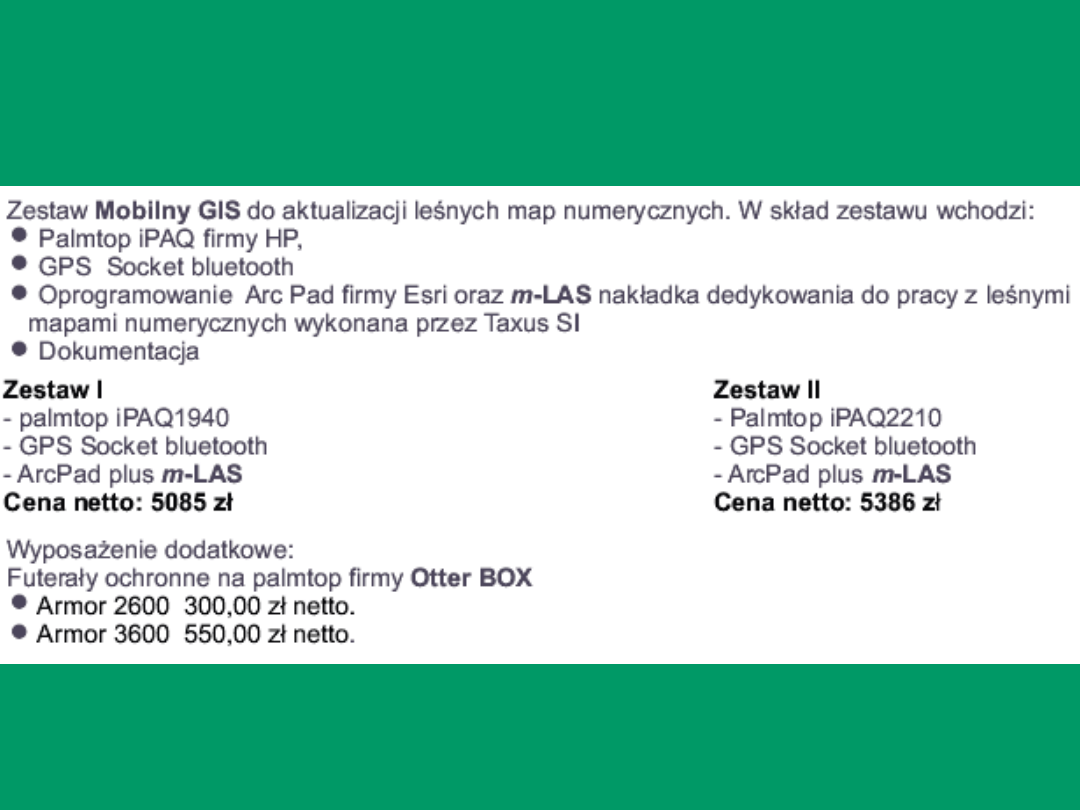
Mobilny GIS - zestaw do aktualizacji
LMN
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
35
Mobilny GIS - zestaw do aktualizacji
LMN
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
36
Mobilny GIS - zestaw do aktualizacji
LMN
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
37
Mobilny GIS - zestaw do aktualizacji
LMN
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
38
Mobilny GIS - zestaw do aktualizacji
LMN
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
39
Mobilny GIS - zestaw do aktualizacji
LMN

20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
40
Mobilny GIS - zestaw do aktualizacji
LMN
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
41
Mobilny GIS - zestaw do aktualizacji
LMN
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
42
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
43
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
44
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
45
20.06.21
Fotogrametria i Systemy Info
rmacji Przestrzennej - Ćwicz
enia 2004/3
46
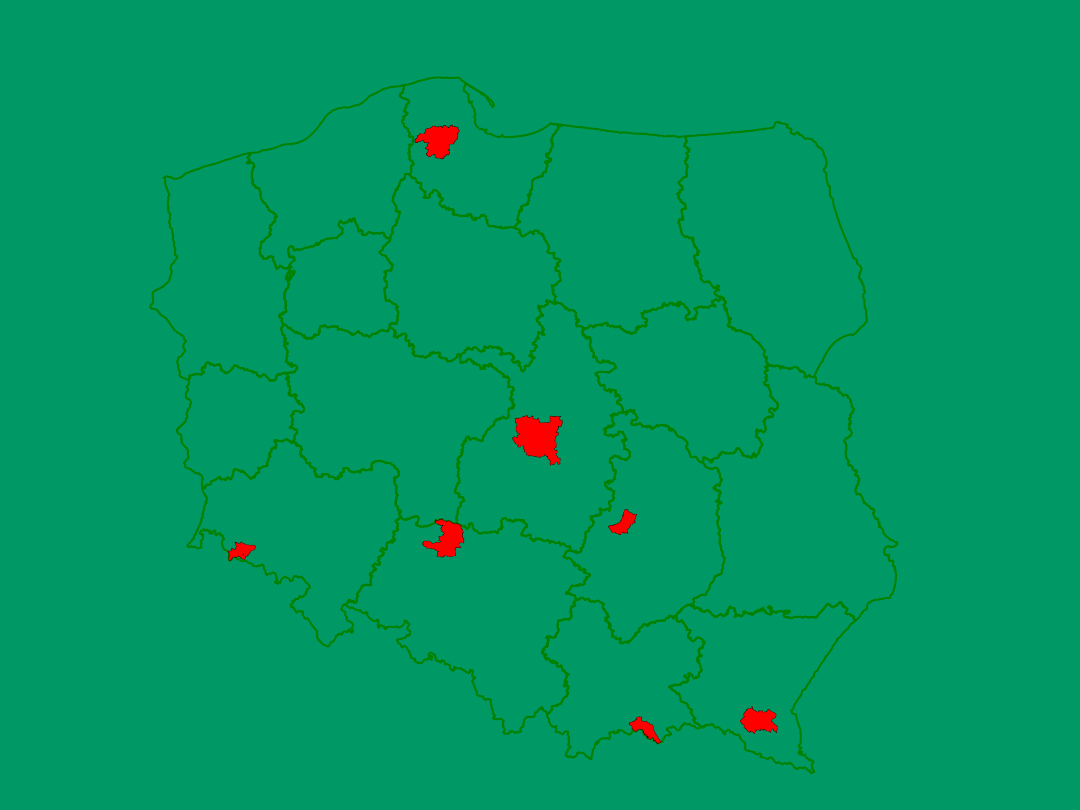
GPS w aktualizacji Leśnej Mapy
Numerycznej
W listopadzie 2000 r. Dyrekcja Generalna Lasów
Państwowych przeprowadziła testy urządzeń GPS, celem:
oceny dokładności lokalizacji geograficznej (orientacji w
układzie współrzędnych 1965) map numerycznych
wybranych nadleśnictw i oraz przydatności techniki GPS
do ich aktualizacji.
Do testu wybrano 7 nadleśnictw posiadających mapy
numeryczne wykonane przez różnych wykonawców i
leżące w różnych częściach kraju (w tym 3 nadleśnictwa
górskie).
LESKO
PIWNICZNA
STĄPORKÓW
KLUCZBORK
GROTNIKI
KARTUZY
SZKLARSKA
PORĘBA
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
Wyszukiwarka
Podobne podstrony:
Fotogrametria i SIP cwiczenia 3
Fotogrametria i SIP cwiczenia 9
Fotogrametria i SIP cwiczenia 1
Fotogrametria i SIP cwiczenia 4
Fotogrametria i SIP cwiczenia 2 konspekt
Fotogrametria i SIP cwiczenia 3
Fotogrametria i SIP cwiczenia 8
Fotogrametria i SIP cwiczenia 4
Fotogrametria i SIP cwiczenia 5
Fotogrametria i SIP cwiczenia 1 konspekt
Fotogrametria i SIP cwiczenia 3
Fotogrametria i SIP cwiczenia 8
Fotogrametria i SIP wyklad 1 2 3 konspekt
Fotogrametria i SIP wyklad 1
fotografia cyfrowa cwiczenia praktyczne cwfotc
Fotogrametria i SIP wyklad 5
Fotogrametria i SIP wyklad 4
więcej podobnych podstron