1
Wykład IX
Metody algorytmiczne
Algorytmy i struktury danych
Wyższa Szkoła Biznesu
Semestr III Informatyka
stosowana
2
Wiemy już prawie
wszystko, ale...
Wydaje się, że możemy teraz dalej pomyślnie podążać
naprzód w naszym algorytmicznym znoju.
– Wiemy jaką strukturę mają algorytmy i jak urządzić
obiekty, którymi manipulują;
– Wiemy również, jak je zapisać, aby wykonał je
komputer (języki programowania).
– Możemy zatem powiedzieć naszemu procesorowi,
co i kiedy ma robić.
Byłaby to jednak nazbyt naiwna ocena sytuacji i wkrótce
zobaczymy rozmaite tego przyczyny. Jedna z trudności
tkwi w fakcie, że nie podaliśmy żadnych metod,
których dałoby się użyć do wymyślenia algorytmu.
3
Od kawałków do całości
Łatwo się opowiada o konstrukcjach, z których
może korzystać algorytm (czyli o kawałkach, z
których może się składać), ale musimy
powiedzieć
nieco
więcej
o
sposobach
zabierania się do zbudowania całości z tych
kawałków.
Na tym wykładzie dokonamy przeglądu kilku
całkiem ogólnych metod algorytmicznych,
których może użyć projektant do znalezienia
rozwiązania zadania algorytmicznego.
4
Tworzenie algorytmów
to zadanie twórcze
Trzeba wszak zauważyć, że na obmyślanie przepisów nie ma
dobrych przepisów Każde takie zadanie stanowi ambitne
wyzwanie dla projektanta algorytmów.
Jedne zadania są proste, inne skomplikowane, a w wypadku
jeszcze innych nawet nadzieja na ich rozwiązanie jest
złudna.
Jedyne zatem co możemy pokazać to, że pewne algorytmy
całkiem zgrabnie wypływają z pewnych ogólnych wzorców.
Morałem niech będzie to, że projektant algorytmów
może odnieść korzyść wypróbowując właśnie te
wzorce w pierwszej kolejności. Jednak z całą pewnością
projektowanie algorytmów jest zajęciem twórczym, które
niekiedy może wymagać naprawdę ogromnej pomysłowości.
5
Poszukiwania i wędrówki
W wielu zadaniach algorytmicznych powstaje potrzeba
obejścia wszystkich elementów pewnej struktury.
Czasami struktura jest po prostu jedną z jawnie
dostępnych w algorytmie struktur danych;
Innym razem jest to jakaś struktura pośrednio w czymś
zawarta, której być może nie da się naprawdę
„zobaczyć”, ale która kryje się gdzieś pod powierzchnią;
Czasami szuka się w tej strukturze czegoś szczególnego
(„kto jest kierownikiem działu łączności z klientami?”);
Albo też pewną pracę należy wykonać w każdym
punkcie („oblicz średnią ocen wszystkich studentów”).
6
Przykłady
Na przykład widać od razu, że proste zadanie
sumowania zarobków z jednego z poprzednich
wykładów wymaga łatwego przejścia po danej liście
pracowników.
Z drugiej strony, o zadaniu, które dotyczyło jedynie
pracowników zarabiających więcej niż ich kierownicy
(patrz wykład: Algorytmy i dane), można pomyśleć,
że wymaga ono obejścia wyimaginowanej tablicy
dwuwymiarowej
o
wierszach
i
kolumnach
odpowiadających
poszczególnym
pracownikom.
Wykonując to obejście poszukujemy pewnych par
pracownik-kierownik.
7
Dobieramy odpowiednią
metodę obejścia
W takich przypadkach zadanie polega na
znalezieniu najbardziej naturalnego sposobu
obejścia
struktury
danych
(jawnej
bądź
niejawnej), z którą ma się do czynienia,
i wyprowadzeniu algorytmu właśnie stąd.
Kiedy w grę wchodzą wektory i tablice, wtedy
pojawiają się zwykle pętle i zagnieżdżone pętle,
co wyjaśniono na wykładzie Algorytmy i dane.
Kiedy w grę wchodzą drzewa, wtedy pojawia się
rekurencja, tak jak w przykładzie z sortowaniem
drzewiastym (ten sam wykład).
8
Pomysł nie zawsze jest
oczywisty
Co prawda, pomysł leżący u podstaw algorytmu
sortowania drzewiastego jest dosyć subtelny i nie
można nań wpaść wymyślając po prostu najlepszą
strukturę sterowania do obejścia danej struktury
danych.
Jeśli już jednak trafi się na ten pomysł, to
drobnostką jest zdanie sobie sprawy z tego, że
składanie odwiedzin za drugim przejściem, w
którym elementy wypisywane są według porządku,
nie jest niczym więcej niż pewnym sposobem
obejścia drzewa binarnego, skąd nietrudno dojść do
konkluzji, że należy użyć rekurencji.
9
Sposoby obchodzenia
drzew
Obejście wynikające z przyjęcia rekurencyjnej trasy
lewostronnej (sortowanie drzewiaste) bywa czasami
nazywane poszukiwaniem w głąb z nawracaniem, jako
że procesor „zanurza się” w drzewo próbując dostać się
najgłębiej, jak można, a kiedy nie może już dalej iść,
nawraca niechętnie, stale usiłując nurkować na nowo.
Jedyną dodatkowa cechą jest tu wymaganie, aby
nurkować jak najbardziej na lewo.
Są też inne sposoby obchodzenia drzew, z których jeden,
dualny wobec poszukiwania w głąb, otrzymał miano
poszukiwania wszerz. Obchodzenie wszerz oznacza, że
wyczerpuje się kolejno poziomy drzewa - najpierw korzeń,
potem całe jego potomstwo, następnie ich potomstwo itd.
10
Poszukiwanie -
Przykładowe zadania
Wiele
ciekawych
zadań
algorytmicznych
obraca się wokół pojęć geometrycznych, takich
jak punkty, linie i odległości, i stanowi zatem
część obszaru zagadnień znanych jako
geometria obliczeniowa.
Wiele problemów w tej dziedzinie wydaje się
wzrokowo
zwodniczo
„łatwymi”
do
rozwiązania, stanowią one jednak prawdziwie
ambitne zadanie dla projektantów algorytmów.
11
Oto jedno z prostszych
zadań
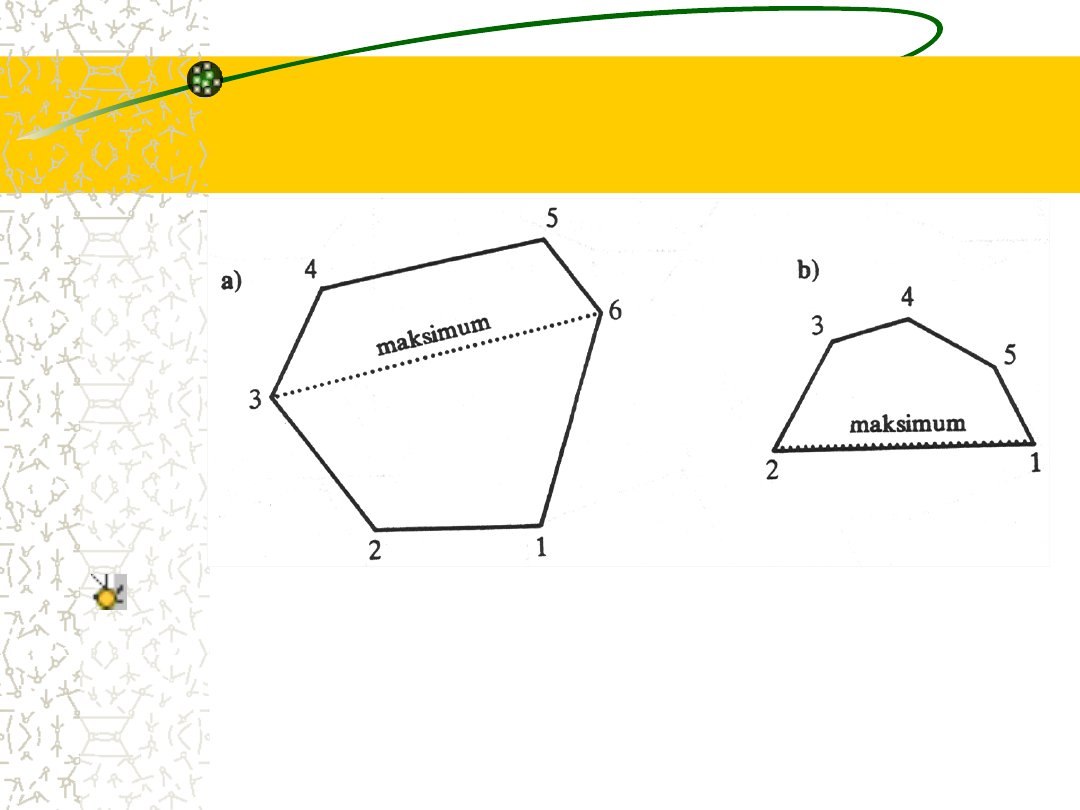
Przypuśćmy, że mamy prosty wielokąt wypukły
jak na rys. (następny slajd) i że interesuje nas
znalezienie takich dwóch punktów na jego
obwodzie, które dzieli największa odległość.
Przyjmujemy, że wielokąt jest przedstawiony jako
ciąg współrzędnych <X,Y> jego wierzchołków, w
kolejności zgodnej z ruchem wskazówek zegara.
Jako że największa odległość wystąpi dla dwóch
wierzchołków, nie ma potrzeby zwracania uwagi
na żadne inne punkty leżące wzdłuż boków
wielokąta różne od wierzchołków.
12
Dwa przykładowe
wielokąty wypukłe
Banalne rozwiązanie polegałoby na zbadaniu, w jakimś
porządku,
wszystkich
par
wierzchołków
i
przechowywałoby w zmiennych bieżące maksimum i
parę, która to maksimum osiąga.
13
Najprostsze rozwiązanie –
więcej szczegółów
Dla każdej nowej rozważanej pary w prosty sposób
oblicza się odległość, nową odległość porównuje się z
bieżącym maksimum i uaktualnia się zmienne, jeśli
okaże się, że jest ona większa, co oznacza, że stanowi
właśnie nowe maksimum.
Jeśli rozważymy przez chwilę to rozwiązanie, stanie się
jasne, że w istocie obchodzimy wyimaginowaną tablicę,
w której każdy wiersz i każda kolumna odpowiadają
pewnemu wierzchołkowi. Wyimaginowany element
danych tkwiący w pozycji <I, J> tej tablicy jest
odległością między wierzchołkami I a J. Obejścia można
łatwo dokonać przy pomocy dwóch zagnieżdżonych
pętli.
14
Czy istnieje lepsze
rozwiązanie ?
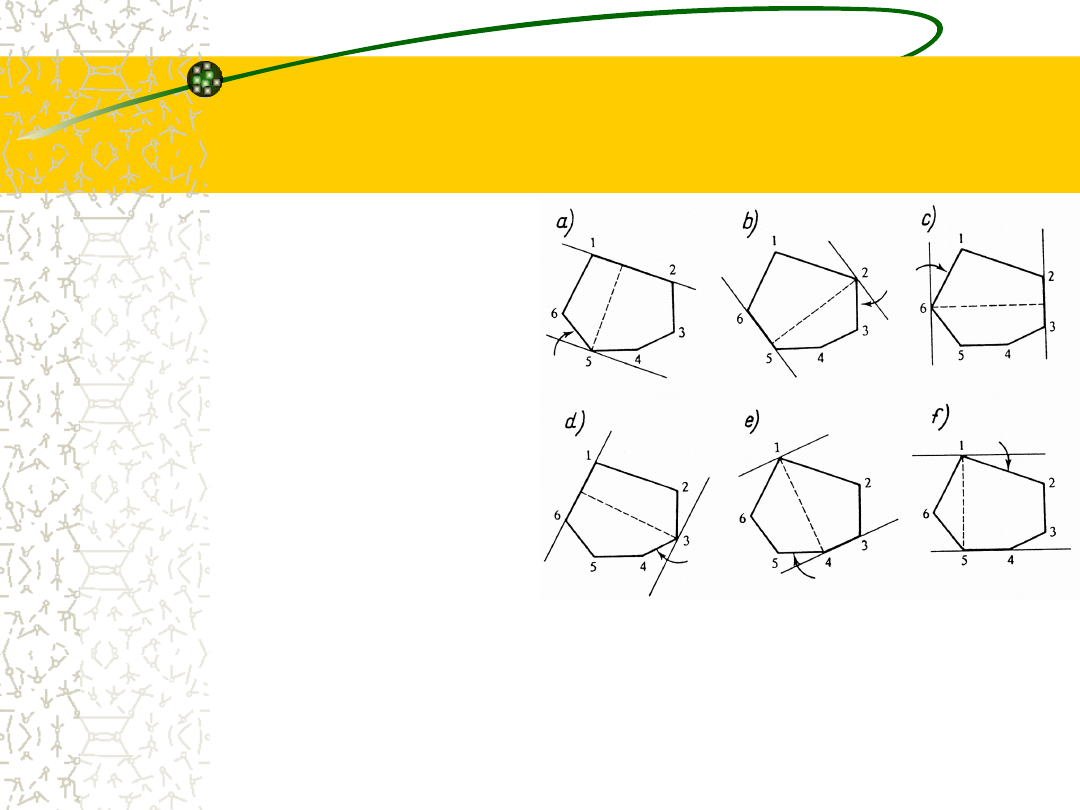
W tym rozwiązaniu jednak uwzględnia się o wiele za dużą liczbę
potencjalnych par; czyż nie powinno się rozważać tylko
„przeciwległych” par punktów, takich jak <1,4>, <2,5> i <3,6)
z rys. a (dwa slajdy wstecz)?
Oznaczałoby to obejście jedynie wektora par „specjalnych”, a
nie tablicy wszystkich par, i dałoby oczywiście w wyniku
sprawniejszy algorytm, wymagający zaledwie pojedynczej pętli.
No cóż, nie jest to tak proste, jak się wydaje, ponieważ
przeciwległe pary, których sobie życzymy, nie muszą mieć
jednakowej liczby wierzchołków po każdej stronie; a na tym
samym rys. tylko w pkt. b pokazano wielokąt, w którym
maksimum występuje dla sąsiadujących wierzchołków, które
pominąłby algorytm rozważający tylko pary o przeciwległych
numerach.
15
Lepsze rozwiązanie
w którym rzeczywiście stosuje
się tylko jedną pętlę i rozważa
tylko „właściwy” gatunek
przeciwległych par,
przedstawiono na rys. obok.
Najpierw „rysuje” się linię
prostą wzdłuż krawędzi <1,2>,
czyli krawędzi między
wierzchołkami 1 i 2. Następnie
do wielokąta, z jego drugiej
strony, stopniowo przysuwa
przysuwa się linię równoległą do poprzedniej dopóty, dopóki
nie natrafi na jeden z wierzchołków. Za pierwsze
przybliżenie szukanego maksimum przyjmuje się większą z
odległości między tym wierzchołkiem a wierzchołkami 1 i 2.
16
Lepsze rozwiązanie
(cd.)
Potem rozpoczyna się ruch w kierunku zgodnym z obiegiem
wskazówek zegara. Każdy krok obejmuje obrót jednej z dwóch linii
tak, aby leżała wzdłuż krawędzi następnej w tym kierunku, i
dopasowanie drugiej linii tak, aby obie przebiegały równolegle. Którą
z linii obrócić, a którą dopasować, ustala się porównując wysiłek
niezbędny do wykonania obrotu; obraca się linię tworzącą mniejszy
kąt z następną krawędzią. Po zakończeniu obrotu mamy nowy
wierzchołek leżący na właśnie obróconej linii.
Obliczoną odległość między tym wierzchołkiem a wierzchołkiem
leżącym na linii dopasowanej porównuje się, jak poprzednio, z
bieżącym maksimum. Wszystko to wykonuje się dookoła całego
wielokąta. Wszelkie akcje wymagane przez ten algorytm obejmują
proste manipulacje numeryczne współrzędnymi wierzchołków,
wynikające z elementarnej geometrii analitycznej. Pozostałe rysunki
ilustrują kolejność przekształceń dokonywanych na tych liniach.
17
W poszukiwaniach
przydaje się wnikliwość
Wybrano ten przykład, aby dodatkowo
zilustrować fakt, że samo zauważenie
potrzeby obejścia czegoś i wymyślenie, co
naprawdę trzeba obejść, jest ważne i
może stanowić istotną pomoc, ale nie
zawsze
wystarczy
do
rozwiązania
trudniejszych zadań algorytmicznych.
Odrobina wnikliwości i sporo wiedzy z
danej dziedziny nigdy tu nie zawadzą.
18
Dziel i zwyciężaj
Często można uporać się z zadaniem sprowadzając je
do mniejszych zadań tego samego rodzaju i
rozwiązując je. Później można połączyć te częściowe
rozwiązania w rozwiązanie ostateczne pierwotnego
zadania.
Jeśli te mniejsze zadania są dokładnie tym samym
zadaniem, z którym mamy do czynienia, lecz
postawionym wobec „mniejszych” lub „prostszych”
danych, to oczywiście w algorytmie można użyć
rekurencji.
Nazwa tej metody jest oczywista: dziel i zwyciężaj.
19
„Dziel i zwyciężaj”
widzieliśmy w przykładzie
z Wieżami Hanoi
Sam
pomysł
widzieliśmy
już
pośrednio w przykładzie Wież
Hanoi: algorytm uporał się z
zadaniem
dla
N
krążków
rozwiązując,
w
odpowiednim
porządku
i
kontekście,
dwa
zadania dla N-1 krążków.
20
Inny przykład
zastosowania podziałów i
zwycięstw
Wyobraź sobie, że wręczono ci książkę telefoniczną o
porozrzucanych kartkach lub że - co zabrzmi
poważniej - otrzymałeś nieuporządkowaną listę L.
Interesuje nas nie posortowanie listy L, lecz tylko
znalezienie jej najmniejszego i największego
elementu. Jasne, że możemy po prostu raz przebiec
tę listę, przechowując w zmiennych bieżące
maksimum i minimum, i cały czas porównywać z
nimi każdy element.
Algorytm, który teraz podamy, opiera się na strategii
„dziel i zwyciężaj” i jest nieco lepszy niż naiwny
algorytm wspomniany powyżej.
21
Schemat algorytmu szukania
minimum i maksimum wg.
„dziel i zwyciężaj”
(1) jeśli lista L składa się z jednego elementu, to ten
element stanowi zarówno minimum, jak i maksimum;
jeśli składa się ona z dwóch elementów, to mniejszy z
nich stanowi minimum, a większy - maksimum;
(2) w przeciwnym razie wykonaj, co następuje:
(2.1)
podziel listę L na połowy, L
1
i L
2
;
(2.2)
znajdź ich skrajne elementy MIN1, MAX1, MIN2
i MAX2;
(2.3)
wybierz mniejszy z MIN1 i MIN2; to właśnie jest
element minimalny listy L;
(2.4)
wybierz większy z MAX1 i MAX2; to właśnie jest
element maksymalny listy L.
22
Zastosowanie rekurencji
wymaga zwrócenia przez
podprogram wyników
Wiersz (2.2) aż woła o wykonanie go rekurencyjnie, jako że
występujące tam zadania do rozwiązania są dokładnie zadaniami
min-i-max dla krótszych list L
1
i L
2
.
Zwykła próba sklecenia tej rekurencji nastręcza tylko pewną
drobną trudność: mianowicie to, że w tym miejscu, w
przeciwieństwie
do
procedury
Wież
Hanoi,
wywołanie
rekurencyjne musi dostarczyć wyników, których trzeba użyć w
dalszej części.
Procesor musi w jakiś sposób nie tylko zapamiętać swój adres
powrotny i to, jak przywrócić w swym otoczeniu sytuację
poprzedzającą wyprawienie się na tę rekurencyjną wycieczkę,
ale musi móc przywieźć z powrotem ze swej wyprawy wyniki. W
tym przypadku byłoby najkorzystniejsze, gdyby procesor mógł
powrócić z rekurencyjnego wywołania razem z żądanym
minimum i maksimum.
23
Rekurencyjne min-i-max
realizujące metodę dziel i
zwyciężaj
procedura znajdź-min-i-max-w L:
(1)jeśli lista L składa się z jednego elementu, to nadaj MIN i MAX
właśnie jego wartość; jeśli L składa się z dwóch elementów, to
nadaj MIN wartość mniejszego z nich, a MAX - większego;
(2)w przeciwnym razie wykonaj co następuje:
(2.1)
podziel listę L na połowy, L
1
i L
2
;
(2.2)
wywołaj znajdź-min-i-max-w L
1
; umieszczając
otrzymane w wyniku wartości w MIN1 i MAX1;
(2.3)
wywołaj znajdź-min-i-max-w L
2
, umieszczając
otrzymane w wyniku wartości w MIN2 i MAX2;
(2.4)
nadaj MIN mniejszą wartość z MIN1 i MIN2;
(2.5)
nadaj MAX większą wartość z MAX1 i MAX2;
(3)
wróć z wartościami MIN i MAX.
24
Nie tylko min i max
Zastosowanie paradygmatu „dziel i zwyciężaj” może
przynieść wiele dobrego przy sortowaniu listy, a nie
tylko przy znajdowaniu w niej skrajnych elementów.
Aby posortować listę L zawierającą co najmniej dwa
elementy, możemy podobnie podzielić ją na połówki L
1
i L
2
i posortować je rekurencyjnie.
Przypadek
pojedynczego
elementu
traktuje
się
oddzielnie, tak jak w przykładzie z min-i-max.
Aby otrzymać ostatecznie posortowaną wersję listy L,
dalej możemy scalić posortowane połówki. Aby scalić
dwie posortowane listy, w kółko wybieramy i dołączamy
do listy wynikowej mniejszy z dwóch elementów akurat
znajdujących się na obu początkach list.s
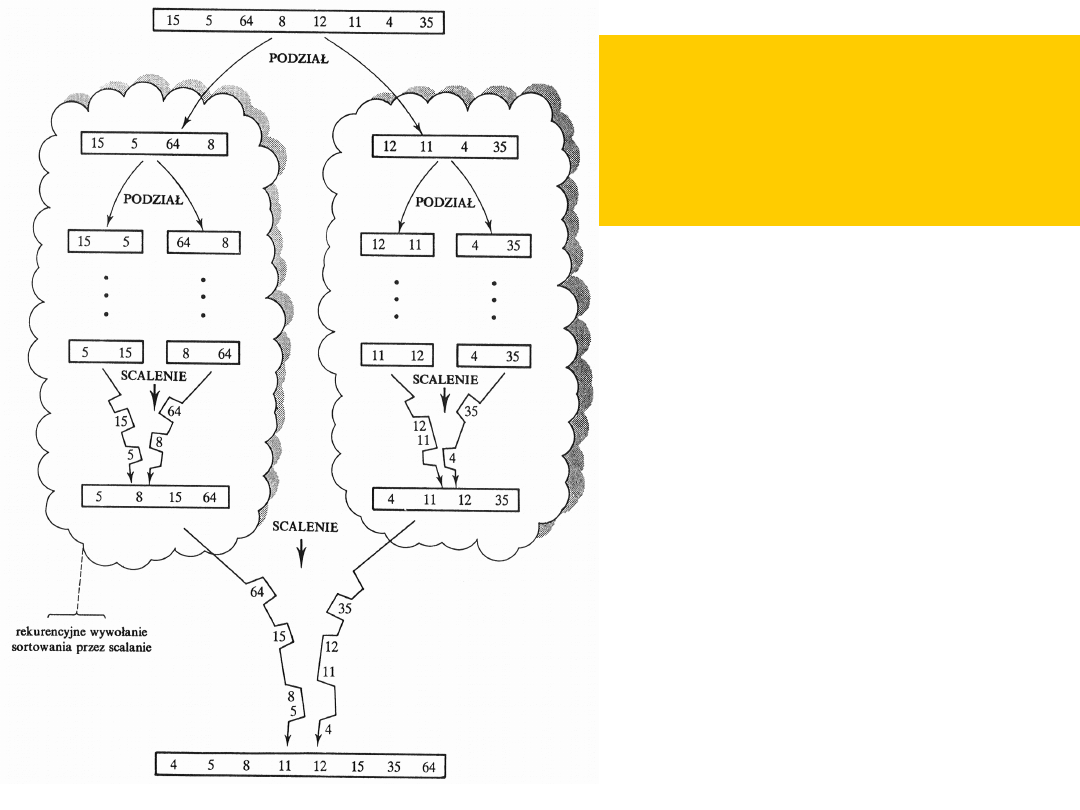
Sposób działania
algorytmu
sortowania przez
scalanie
Sortowanie przez
scalanie
jest
znacznie
lepsze
zarówno
od
sortowania
bąbelkowego, jak
i drzewiastego.
26
Zachłanne algorytmy i
budowniczowie kolei
Wiele zadań algorytmicznych wymaga dostarczenia wyniku,
który jest w jakimś sensie najlepszy z odpowiedniego zestawu
możliwości.
Rozważmy teraz sieć miast i leniwego przedsiębiorcę
budującego kolej. Przedsiębiorcy zapłacono za takie ułożenie
torów, aby z każdego miasta można było dotrzeć do każdego
innego.
W umowie nie ustalono żadnych kryteriów, takich jak
potrzeba wykonania pewnych bezpośrednich połączeń czy
największa dopuszczalna liczba miast leżących na drodze
między każdymi dwoma.
Naszego przedsiębiorcę, jako że jest leniwy, interesuje
ułożenie najtańszej (czyli najkrótszej) kombinacji odcinków
szyn.
27
Założenia
Przyjmijmy, że z przyczyn obiektywnych, takich jak
przeszkody naturalne, nie każde miasto można
połączyć
bezpośrednimi
odcinkami
szyn
ze
wszystkimi innymi i że odległości podano jedynie dla
par miast możliwych do bezpośredniego połączenia.
Przyjmijmy
dalej,
że
koszt
bezpośredniego
połączenia miasta A z miastem B jest proporcjonalny
do odległości między nimi. Co więcej, nie
dopuszczamy
skrzyżowań
i
rozjazdów
poza
miastami.
28
Grafy
Taka
sieć
nazywa
się
grafem
etykietowanym lub krócej grafem.
Grafy przypominają drzewa, tyle że drzewa
nie mogą „zrastać się” gałęziami, a więc
nie mogą zawierać cykli albo pętli,
podczas gdy grafy mogą.
Przykład grafu miast i jego minimalnej sieci
kolejowej widzimy na rys. na następnym
slajdzie.
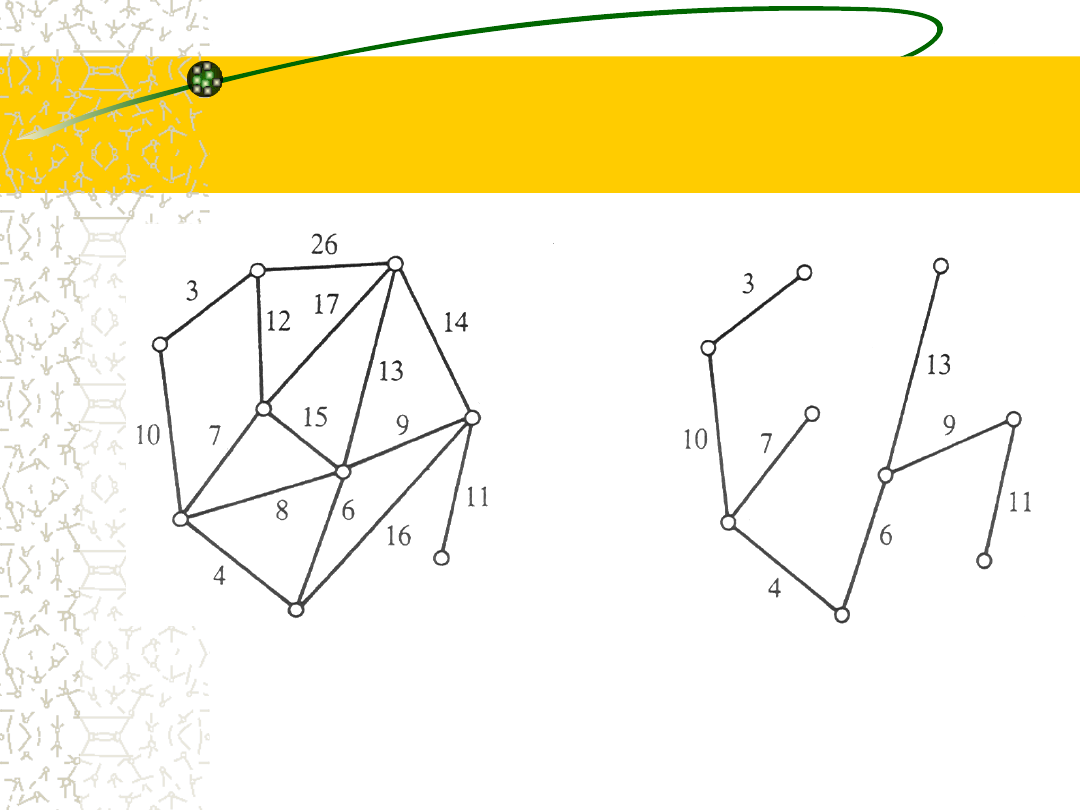
29
Sieć miast i jej
minimalna rozpinająca
sieć kolejowa
(Rysunek nie zachowuje proporcji) Całkowity koszt 63
30
Minimalne drzewo
rozpinające
Zauważmy, że budowniczemu zależy naprawdę na tym,
co nazywamy minimalnym drzewem rozpinającym.
To takie drzewo, na którym jest „rozpięty” graf w tym
sensie, że dociera ono do dokładnie każdego z węzłów
(w naszym przypadku miast) i które jest najtańszym z
takich drzew w tym sensie, że suma etykiet znajdujących
się przy krawędziach jest najmniejsza z możliwych.
Żądane rozwiązanie musi być oczywiście drzewem,
gdyż w przeciwnym razie musiałoby zawierać jakiś cykl,
a leniwy przedsiębiorca mógłby otrzymać tańszą sieć
kolejową,
nadal
łączącą
wszystkie
miasta,
eliminując jeden z odcinków tego cyklu.
31
Metoda zachłanna
Jest pewne algorytmiczne podejście do takich zadań,
zwane zachłanną metodą.
Zaleca ono konstruowanie minimalnego drzewa
rozpinającego krawędź po krawędzi, w drodze
wybierania jako następnej krawędzi zawsze tej, która
jest najlepsza z punktu widzenia bieżącej sytuacji.
Naprawdę oznacza to przyjęcie filozofii rodzaju
„jedzmy i pijmy dziś, bo jutro może już nas nie
będzie”.
W przypadku rozpinających sieci kolejowych można
prowadzić tą konstrukcję na przykład tak, jak
pokazano na rys.
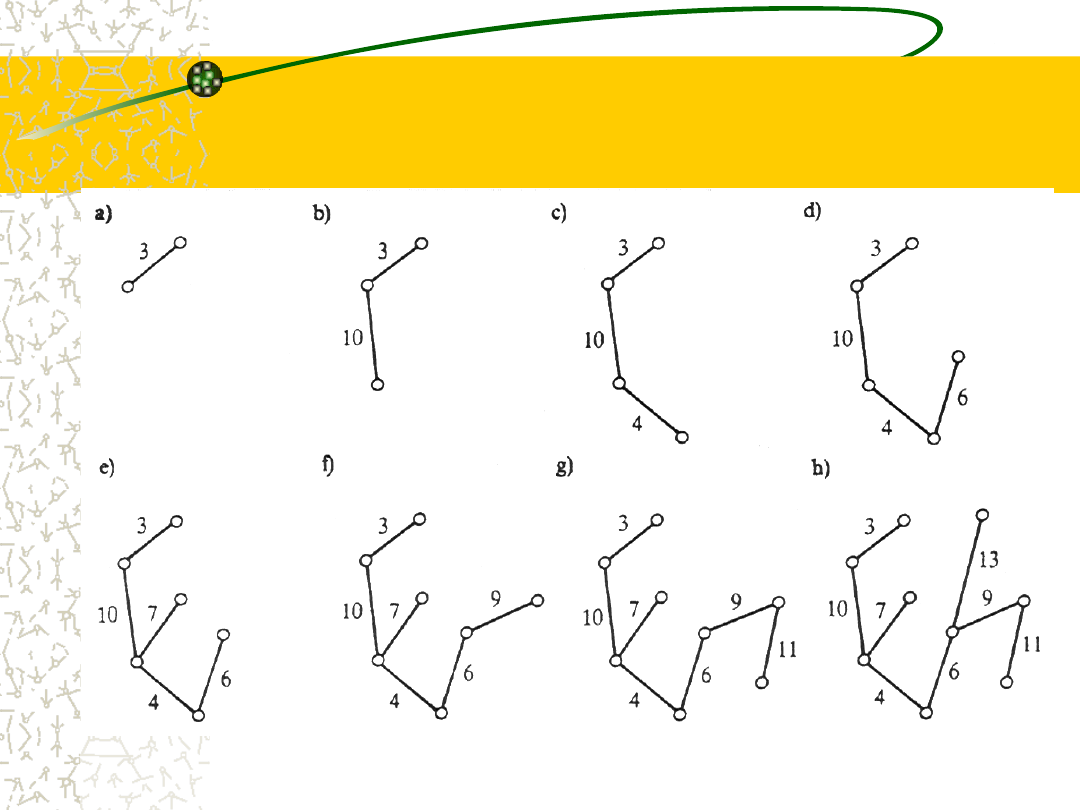
32
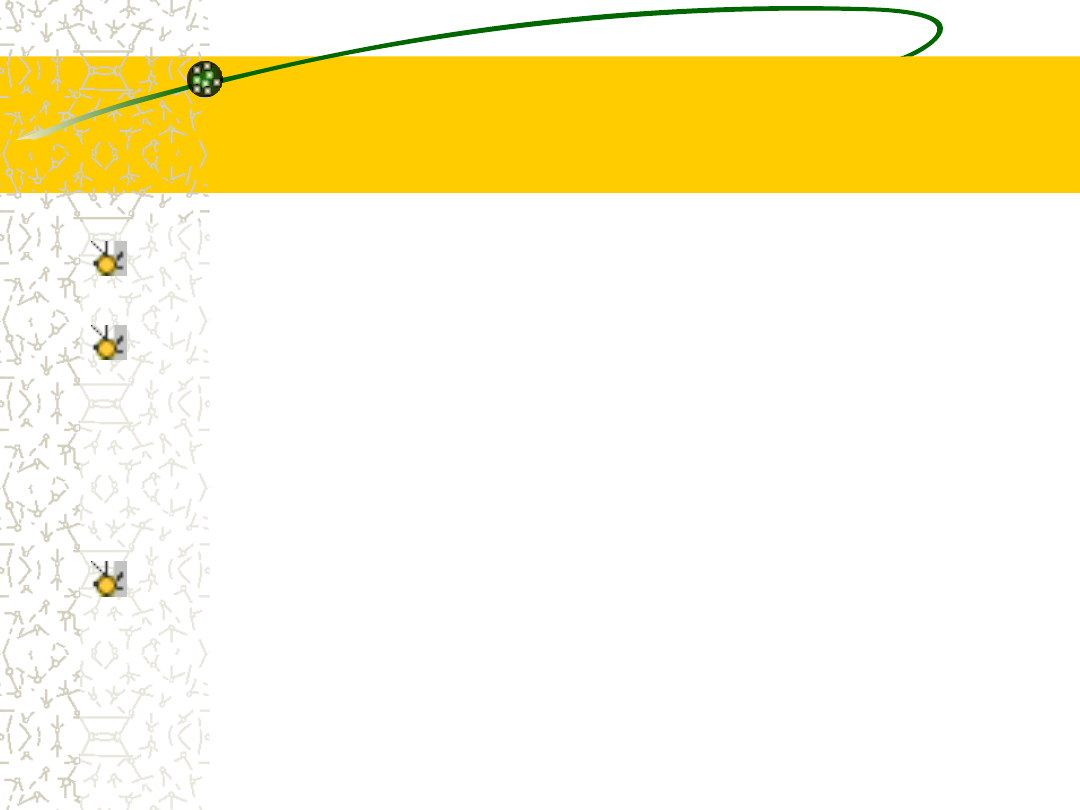
Działanie zachłannego
algorytmu znajdowania min.
drzewa rozpinającego
33
Sposób poszukiwania
minimalnego drzewa
rozpinającego
Zacznijmy
od
zdegenerowanego
drzewa
składającego się z najtańszej krawędzi grafu.
W każdym kroku rozbudowujemy skonstruowane
dotychczas drzewo, dodając do niego najtańszą z
krawędzi nie wziętych dotąd pod uwagę, które dają
nowe drzewo (w szczególności dodanie tej krawędzi
nie powinno doprowadzić do powstania cyklu; jeśli
doprowadza do tego, przechodzimy do krawędzi
następnej w porządku rosnących kosztów).
Można wykazać, że ta prosta strategia w rezultacie
rzeczywiście daje minimalne drzewo rozpinające.
34
Zachłanność nie zawsze
się opłaca
Zachłanne
algorytmy
istnieją
dla
ogromnego mnóstwa ciekawych zadań
algorytmicznych.
Zwykle można je łatwo wynaleźć i w
niektórych przypadkach bywają bardzo
intuicyjne.
Trudna część polega zwykle na pokazaniu,
że zachłanna strategia rzeczywiście działa,
a jak zobaczymy za chwilę, są sytuacje, w
których zachłanność zupełnie nie popłaca.
35
Dynamiczne planowanie
i znużeni wędrowcy
Oto zadanie podobne do znajdowania minimalnego drzewa
rozpinającego,
ale
opierające
się
zachłannym
próbom
rozwiązania.
Dotyczy ono również sieci miast, ale zamiast leniwego
budowniczego kolei mamy tu znużonego wędrowca, który musi
dostać się z jednego miasta do drugiego.
Chociaż obaj mają przed sobą zadanie do wykonania i chcą
zminimalizować jego ogólny koszt, jest między nimi zasadnicza
różnica: podczas gdy budowniczy ma połączyć siecią torów
wszystkie miasta, wędrowiec odwiedzi na ogół tylko
niektóre z nich.
Jest zatem jasne, że wędrowiec nie szuka minimalnego drzewa
rozpinającego. Szuka raczej minimalnej ścieżki, czyli najtańszej
drogi wiodącej od początkowego miasta do miasta przeznaczenia.
36
Założenia: graf jest
skierowany, spójny i
acykliczny
Aby ułatwić sobie prezentację tego zadania,
przyjmiemy, że wszystkie linie w grafie miast są
skierowane, co oznacza, że jeśli istnieje jakieś
bezpośrednie połączenie między tymi dwoma
miastami, jest to połączenie w jedną stronę.
Przyjmiemy też, że graf jest spójny, co znaczy, że z
każdego miasta można w końcu dotrzeć do każdego
innego.
Założymy dalej, że graf miast nie zawiera cykli, tak że
naprawdę znużony wędrowiec nie będzie narażony na
błąkanie się w kółko, gdyż takich kółek po prostu nie
ma. Nasz układ - to skierowany graf acykliczny.
37
Zachłanne podejście do
zadania
Mamy zatem taki graf i wędrowiec ma dotrzeć z miasta A
do B.
Zachłanne podejście do tego zadania dałoby w wyniku
następującą ścieżkę. Zaczęlibyśmy od A i dodawalibyśmy
ciągle, aż do osiągnięcia docelowego miasta B, do
bieżącej
częściowej
ścieżki
najtańszą
krawędź
wychodzącą z właśnie osiągniętego miasta i prowadzącą
do miasta jeszcze nie odwiedzonego.
Przykład zastosowania tego robiącego naturalne wrażenie
algorytmu do grafu, w którym koszt minimalnej ścieżki
między A i B wynosi 13 jednostek, pokazano na rys.
(następny slajd).
38
Algorytm musi być
bardziej wnikliwy
Nasz zachłanny algorytm znajduje ścieżkę o koszcie 15
jednostek, co jest nieco gorsze. Zachłanność w tym miejscu
nie popłaca, jako że sprytny algorytm musi być
dostatecznie wnikliwy, aby wybrać krawędź o długości 5
prowadzącą do C, a potem krawędź o długości 3 do E, mimo
że taki wybór lokalnie nie wygląda najbardziej obiecująco.
39
Planowanie dynamiczne
Inna, już nie zachłanna, metoda
algorytmiczna, zwana planowaniem
dynamicznym, sprawia, że można
dokonywać tak subtelnych wyborów.
Planowanie dynamiczne opiera się na
wysubtelnieniu
dość
zgrubnego
kryterium
używanego
przy
natychmiastowej zachłanności.
40
Idea planowania
dynamicznego
Tę metodę można opisać abstrakcyjnie w następujący
sposób.
Przypuśćmy,
że
rozwiązanie
pewnego
zadania
algorytmicznego ma składać się z optymalnego ciągu
wyborów. Jak już wykazaliśmy, całkiem możliwe, że
wybieranie z każdego lokalnego ciągu możliwości
najbardziej obiecującego wariantu nie doprowadzi do
powstania ciągu optymalnego.
Jednak często zdarza się, że można otrzymać ciąg
optymalny rozważając wszystkie kombinacje powstałe z:
a) dokonania konkretnego wyboru
b) znalezienia optymalnej części ciągu pozostałych wyborów.
41
Trzeba poszukać kilku
ścieżek i je porównać
Na przykład na rys. długość najkrótszej ścieżki wiodącej
z A do B jest najmniejszą z trzech liczb otrzymanych
przez wybranie najpierw jednego z miast C, G i D
(bezpośrednio osiągalnych z A), a potem dodanie jego
odległości od A do długości najkrótszej ścieżki
prowadzącej zeń do B.
Oznaczywszy długość najkrótszej ścieżki z X do B przez
L(X), możemy symbolicznie napisać
L(A)=minimum z 5+L(C), 14+L(G), 3+L(D)
(zob. rys.) Oznacza to, że możemy znaleźć ścieżkę
optymalną znajdując trzy „mniejsze” ścieżki optymalne,
a później wykonując kilka dodawań i porównań.
42
Ten proces można
kontynuować
L(D)=minimum z 7+L(E), 6+L(G), 11+L(C)
Kiedy już taki wywód doprowadzi do wyrażeń
zawierających L(B) (tj. minimalną odległość z B do
siebie samego), nie trzeba nam niczego więcej, gdyż
nawet całkiem wyczerpany wędrowiec wie, że L(B)=0,
na mocy faktu, że najlepszym sposobem dojścia z B
do B jest po prostu pozostanie tam, gdzie się stoi.
Te spostrzeżenia prowadzą do algorytmu planowania
dynamicznego
rozwiązującego
ogólne
zadanie
znużonego wędrowca (czasami nazywane zadaniem
znajdowania najkrótszej ścieżki).
43
Ogólne rozwiązanie
zadania poszukiwania
najkrótszej ścieżki
Jeśli miastami są C
1
, ..., C
N
, a droga ma się
rozpocząć w C
1
i skończyć w C
N
, to algorytm
wymaga obliczenia optymalnej drogi częściowej
L(C
I
), przedstawiającej najkrótszą ścieżkę z C
I
do
miasta docelowego C
N
dla każdego I między 1 a N.
Jednak L(C
I
) stanowi minimum ze wszystkich sum
postaci
odległość-z-C
I
-do-C
K
+L(C
K
)
przy czym w obliczaniu minimum uwzględnia się
wszystkie miasta C
K
, do których prowadzą
bezpośrednio krawędzie z C
I
.
44
Ogólne rozwiązanie
zadania poszukiwania
najkrótszej ścieżki
(cd.)
Ponieważ wszystkie krawędzie są jednokierunkowe,
a graf nie zawiera cykli, możemy w ten sposób
obliczyć wszystkie L(C
I
) posuwając się z B do tyłu.
Patrząc na rysunek obliczamy najpierw wprost L(F),
L(E) i L(G) i otrzymujemy odpowiednio 7, 5 i 6;
potem obliczamy L(C) jako minimum z 2+L(F) i
3+L(E) (w tym wypadku 8); potem L(D) itd., aż
wreszcie
otrzymamy
L(A).
Równocześnie
powinniśmy śledzić tak skonstruowaną ścieżkę
biegnącą do tyłu z B do A, jest bowiem ścieżką
optymalna, której szukamy.
45
Narzucająca się tu
rekurencja nie jest
optymalnym
rozwiązaniem
Pojawia się pokusa napisania rekurencyjnej procedury opartej
na obliczaniu L(C
I
) na podstawie L(C
K
) tak, jak opisano powyżej.
A jednak byłoby to błędem. Powód jest taki, że ta sama
optymalna ścieżka częściowa może być potrzebna w więcej niż
jednej „większej” ścieżce, a naiwny algorytm rekurencyjny
będzie obliczać ją wciąż na nowo.
Na rys.odległości L(E) używa się do obliczania zarówno L(C) jak
i L(D), a zatem procesor wykonujący naszkicowaną przed
chwilą procedurę obliczy tę ścieżkę dwukrotnie.
W planowaniu dynamicznym będzie właściwe iteracyjne
obliczenie wszystkich L(C
I
) w porządku wstecznym i
przechowanie ich w tablicy, tak że gdy raz już obliczy się,
powiedzmy, odległość L(E), to można jej będzie użyć powtórnie
wyszukując tę wartość w tablicy, a nie obliczając ją na nowo.
46
To nic innego jak daleko
posunięta metoda „Dziel i
zwyciężaj”
O planowaniu dynamicznym można myśleć jako o
strategii „dziel i zwyciężaj” posuniętej do
ostateczności:
wszystkie
zadania
częściowe
rozwiązuje się w kolejności wzrastania ich rozmiaru,
a wyniki przechowuje się w jakiejś strukturze
danych, tak aby ułatwić otrzymanie rozwiązań
większych zadań.
Tę metodę można stosować do wielu znacznie
bardziej
wymyślnych
zadań,
które
do
przechowywania częściowych wyników wymagają
struktur danych bardziej złożonych niż zwykłe
wektory.
47
Metody algorytmiczne
-podsumowanie
Jest niewiele powszechnie przyjętych wzorców
postępowania, na tyle ogólnych, aby można je
było nazwać metodami algorytmicznymi.
Większość lepiej znanych metod już opisaliśmy.
Mimo to, nawet bez stawiania sobie za
konkretny
cel
uzyskania
ogólnych
paradygmatów, informatycy wciąż poszukują
lepszych metod rozwiązywania coraz to
trudniejszych zadań algorytmicznych.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
Wyszukiwarka
Podobne podstrony:
Algorytmy i struktury danych Wykład 1 Reprezentacja informacji w komputerze
Algorytmy i struktury danych Wykład 3 i 4 Tablice, rekordy i zbiory
Algorytmy i struktury danych Wykład 2 Typ danych,Proste typy danych
Algorytmy i struktury danych Wykład 8 Języki programowania
Algorytmy i Struktury Danych Wykład
Algorytmy i struktury danych Wykład 1 Reprezentacja informacji w komputerze
Algorytmy i struktury danych Wykład 3 i 4 Tablice, rekordy i zbiory
Algorytmy wyklady, Elementarne struktury danych
wyk.9, Informatyka PWr, Algorytmy i Struktury Danych, Architektura Systemów Komputerowych, Assembler
wyk.7.1, Informatyka PWr, Algorytmy i Struktury Danych, Architektura Systemów Komputerowych, Assembl
Algorytmy i struktury danych AiSD-C-Wyklad05
wyk.7, Informatyka PWr, Algorytmy i Struktury Danych, Architektura Systemów Komputerowych, Assembler
wyk.8, Informatyka PWr, Algorytmy i Struktury Danych, Architektura Systemów Komputerowych, Assembler
Algorytmy i struktury danych, AiSD C Wyklad04 2
wyklad AiSD, Informatyka PWr, Algorytmy i Struktury Danych, Algorytmy i Struktury Danych
Algorytmy i struktury danych AiSD-C-Wyklad04
NP 12 Algorytmy i struktury danych Boryczka-do wykładu
Algorytmy i struktury danych, AiSD C Wyklad03 2
Z Wykład 17.05.2008, Zajęcia, II semestr 2008, Algorytmy i struktury danych
więcej podobnych podstron