Wibroakustyczne monitorowanie
pewnego układu elektromechanicznego
Praca przejściowa II
Piotr
SEKUŁOWICZ
Gr. 513
Rok akad. 2004/05
Opiekun
dr inż. Michał Prącik
Ps. 24, 8
“ .......”
Plan
wystąpienia
1. Wstęp
2. Przedmiot, cel i zakres pracy
3. Stanowisko do badań doświadczalnych
4. Przedstawienie wyników badań
5. Wnioski
Wibroakustyczne monitorowanie układu elektromechanicznego,
mechanizmu zamiany ruchu postępowo-zwrotnego na ruch obrotowy,
skokowo przerywany
TEORIA MODELOWANIA i SYMULACJI
wybór metody budowy modelu i narzędzi
symulacji, identyfikacja modelu
symulacja dynamiki napędu;
drgań konstrukcji; zmęczenia
TEORIA MECHANIZMÓW
TEORIA DRGAŃ
AKUSTYKA
Interdyscyplinarny
charakter tematu
DIAGNOSTYKA i EKSPLOATACJA
zbieranie, transmisja i przetwarzanie
danych pomiarowych
METROLOGIA
i TEORIA EKSPERYMENTU
program i metodyka badań
statystyczne opracowanie danych
Ocena diagnostyczna ruchu mechanizmu czytnika taśmy
perforowanej bazuje na metodzie
oceny trójparametrowej
(wg
Blake’a [12]) stosowanej do kwalifikacji symptomów drganiowych
mechanizmów. Ocena ta pozwala klasyfikować stan
diagnozowanego mechanizmu do jednej z pięciu klas i
charakteryzuje się ponad 92% trafnością diagnozy, wymaga
jednak dodatkowych pomiarów prędkości drgań.
Głównym celem niniejszej pracy jest
wibroakustyczne
monitorowanie układu elektromechanicznego
mechanizmu zamieniającego ruch postępowo-zwrotny na
ruch obrotowy, skokowo przerywany
. Celem jest ocena
dynamiki mechanizmu czytnika taśmy perforowanej, dokonana
w oparciu o pomiary przemieszczeń wahacza kotwicy
mechanizmu czytnika, przy użyciu laserowego miernika
przemieszczeń dynamicznych (z głowicą LD1605-20)
Przemieszczenia wahacza kotwicy są wymuszane układem
elektromechanicznym zasilanym sygnałem napięciowym
harmonicznym oraz prostokątnym (generator funkcyjny typu
RTF 03005).
W odniesieniu do każdej maszyny, urządzenia, zespołu,
elementu jakości określają następujące czynniki: trwałość,
niezawodność, dokładność, poziom zakłóceń
zewnętrznych.
Trwałość elementów mechanicznych
jest to zdolność elementu do
przenoszenia zadanych obciążeń mechanicznych mierzona w jednostkach czasu
bądź w ilości cykli obciążeń. Istnieje związek między trwałością materiałów
elementów maszyn a amplitudą zmiennego dynamicznego naprężenia jakiemu
zostają poddane.
Naprężenia dynamiczne w elemencie drgającym dowolnie lecz stacjonarnie
można wyrazić za pomocą maksymalnej amplitudy prędkości drgań danego
elementu.
Niezawodność maszyn, urządzeń i zespołów
jest definiowana jako
prawdopodobieństwo wypełnienia przewidzianej dla nich funkcji w zadanym
czasie i warunkach zewnętrznych. Istotnym składnikiem tych warunków jest
poziom drgań, na które narażone jest urządzenie
.
Dokładność
określają przede wszystkim błędy (odchyłki) kształtu i
położenia. Pierwsze są szczególnie ważne w obrabiarkach (błędy kształtu
powstające wskutek drgań przy obrabiarce), zaś drugie w urządzeniach
transportowych – wahania nosiwa
.
Poziom emitowanych zakłóceń
natury mechanicznej, czyli drgania i
hałas emitowane do otoczenia przez maszyny, urządzenia i realizowane przez
nie procesy technologiczne, stanowią zagrożenia drganiowe dla operatorów oraz
dla wrażliwych maszyn i urządzeń.
Obserwując charakter drgań maszyn w funkcji czasu ich życia, możemy
wykorzystać informacje o maszynie zawarte w jej procesie drganiowym i
dokonać odeny stanu technicznego maszyny.
Obiekt
,
cel
, zakres
układ elektromechaniczny czytnika taśmy
perforowanej
określenie obszaru stabilności ruchu
stacjonarnego badanego mechanizmu
pomiary wielkości kinematycznych
i dynamicznych w procesie eksploatacji
czytnika
Jakie
następstwa dla trwałości
i innych cech
eksploatacyjnych mechanizmu pociąga za sobą utrata
stabilności ruchu stacjonarnego ?
W jaki sposób można
obiektywnie
rejestrować
utratę
stabilności ruchu stacjonarnego w czasie badania
mechanizmu czytnika ?
Jakie
wielkości
należy poddać
pomiarom
i jaką przyjąć
formę
reprezentacji wyników
pomiarów aby można było uzyskać
adekwatną miarę utraty stabilności ruchu obserwowaną w
trakcie badań doświadczalnych mechanizmu ?
Dokonując
próby symulacji
ruchu układu i zjawisk w nim
obserwowanych, jakie
ograniczenia
wprowadzi zastosowanie
określonego
pakietu symulacyjnego
?
VisSim ;
MathCad
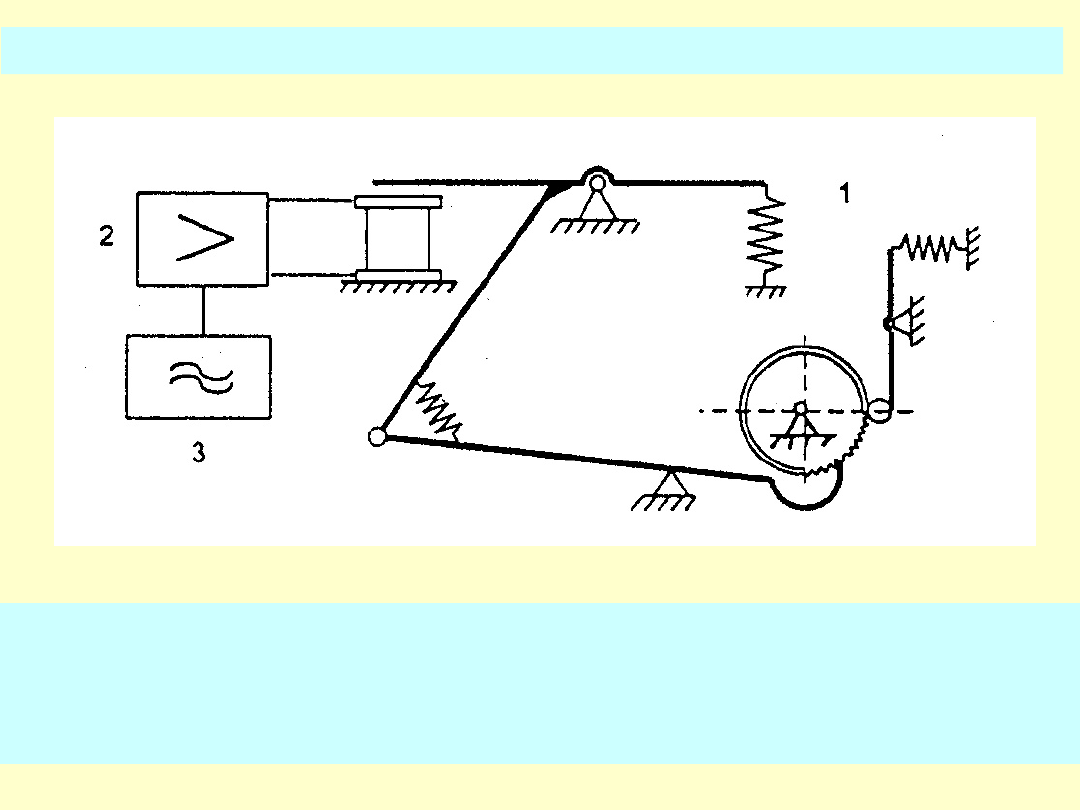
Schemat badanego układu napędowego mechanizmu czytnika
1 - zespół mechaniczny układu napędowego, z kołem zapadkowym
2 - wzmacniacz mocy typu LV 103 z regulacją napięcia wyjściowego (0 - 30 V)
3 - generator funkcyjny RFT 03005 (wykorzystywano sygnał napięciowy
harmoniczny i prostokątny; zakres 0 - 30 Hz)
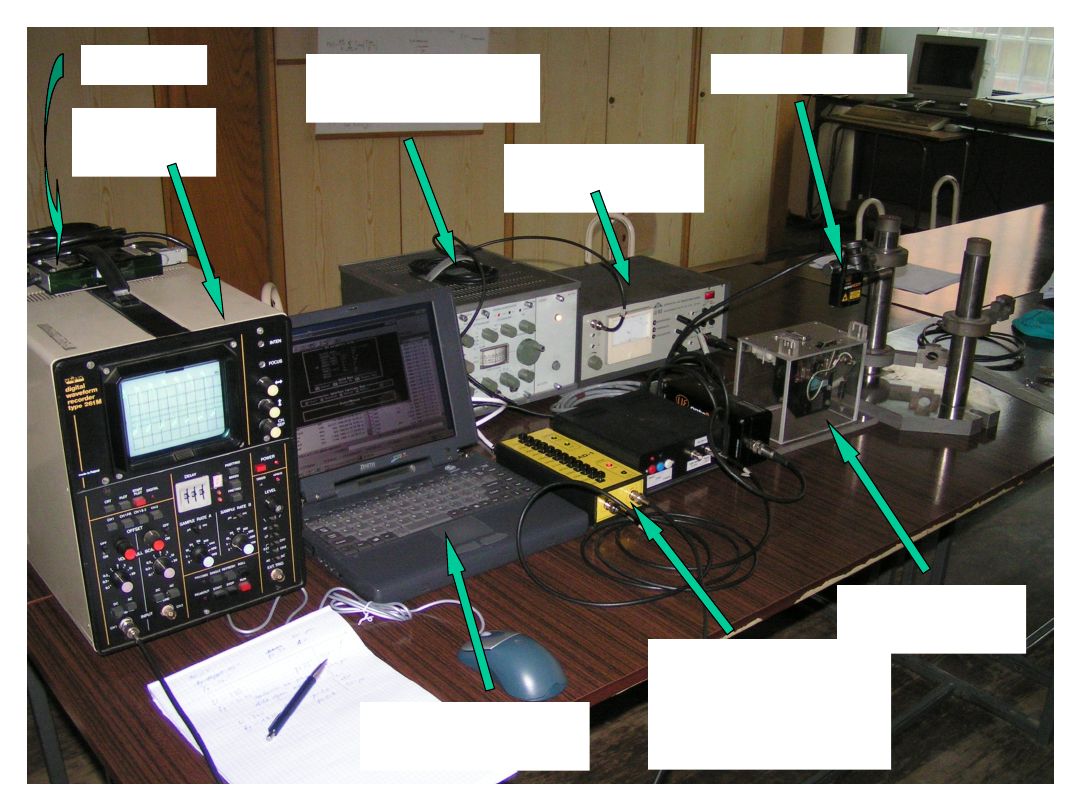
głowica lasera
oscylosko
p
generator
funkcyjny
badany
obiekt
filtr
dolnoprzepustow
y
antyalisingowy
interfejs
wzmacniacz
mocy
komputer
pomiarowy
PLAN BADAŃ DOŚWIADCZALNYCH
Na bazie literatury dotyczącej Teorii Eksperymentu i Statystyki
1. Gajek L., Kałuszka M.: Wnioskowanie statystyczne, WN-T,Warszawa 1998
2. Górecka R.: Teoria i technika eksperymentu, skrypt Politechniki Krakowskiej, 1996
3. Polański Z.: Planownie doświadczeń w technice, PWN, Warszawa, 1984
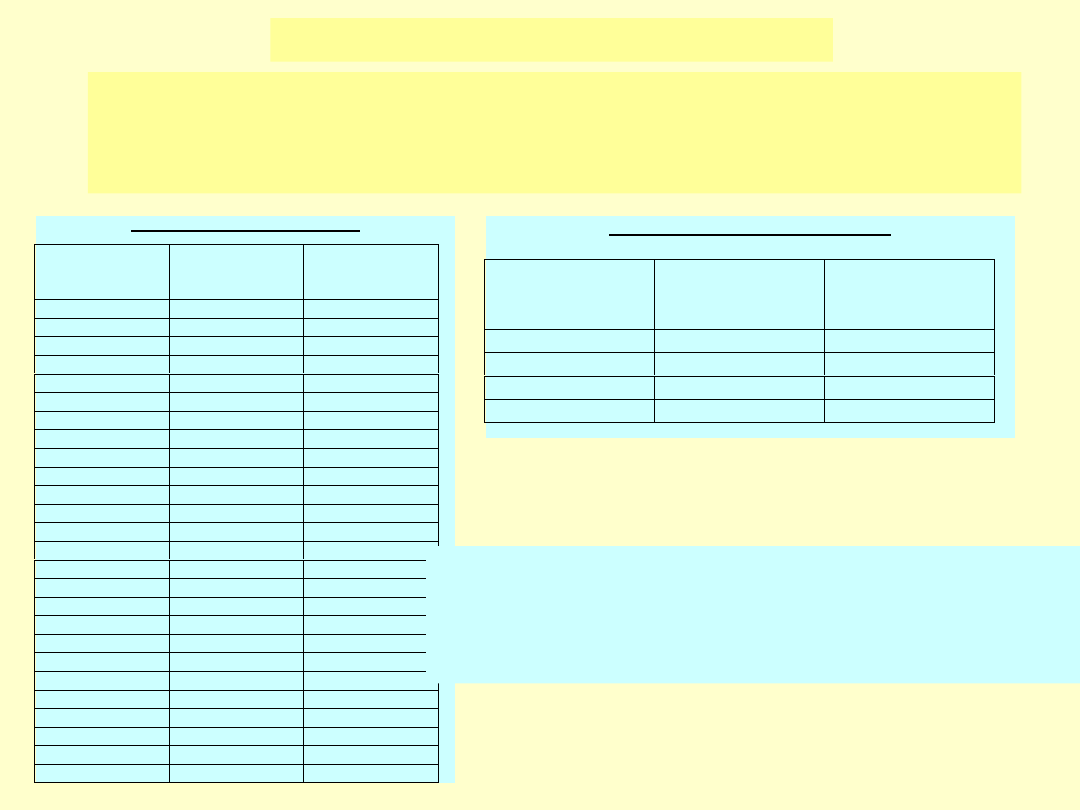
Wymuszenie sygnałem harmonicznym
Nazwa pomiaru
Napięcie [V]
Częstotliwość [Hz]
ps1.dat
10
2.5
ps2.dat
12
7.6
ps3.dat
12
6
ps4.dat
12
1.8
ps5.dat
11
0.9
ps6.dat
11
0.86
ps7.dat
10
0.72
ps8.dat
15
9.8
ps9.dat
15
9.8
ps10.dat
15
9.8
ps11.dat
15
0.92
ps12.dat
17
0.7
ps13.dat
17
0.7
ps14.dat
18.5
13.5
ps15.dat
20
14.0
ps16.dat
20
14.0
ps17.dat
20
14.0
ps18.dat
20
14.0
ps19.dat
20
14.0
ps20.dat
20
14.0
ps21.dat
20.5
16.5
ps22.dat
20.5
16.5
ps23.dat
20.5
16.5
ps24.dat
20.5
16.5
ps25.dat
23.5
22
ps26.dat
24
18
Wymuszenie sygnałem prostokątnym
Pomiar
Napięcie [V]
Częstotliwość [Hz]
pp1.dat
15
7
pp2.dat
15.5
8.2
pp3.dat
20
11.5
pp4.dat
22
16
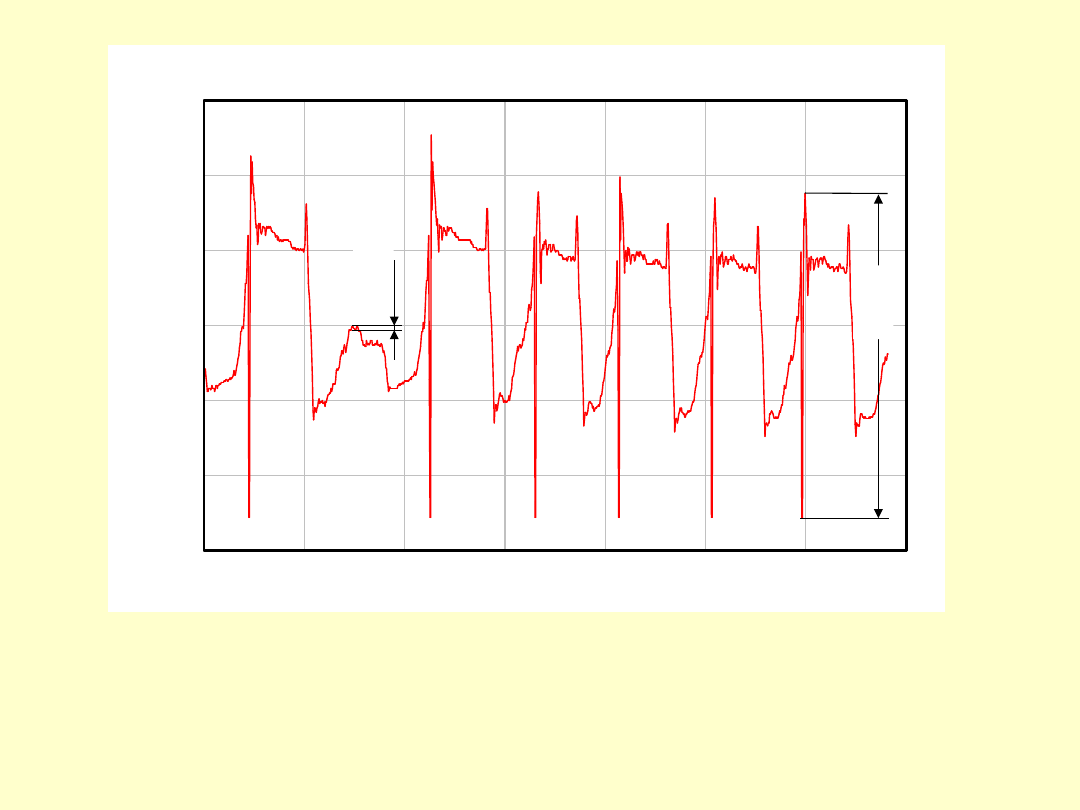
Often is easier and faster to built a prototype
and take a look at the results than to argue
about what might be ..
Steve Ciarcia
0
0.25
0.5
0.75
1
1.25
1.5
1.75
2
2.25
-0.6
-0.45
-0.3
-0.15
0
0.15
0.3
0.45
0.6
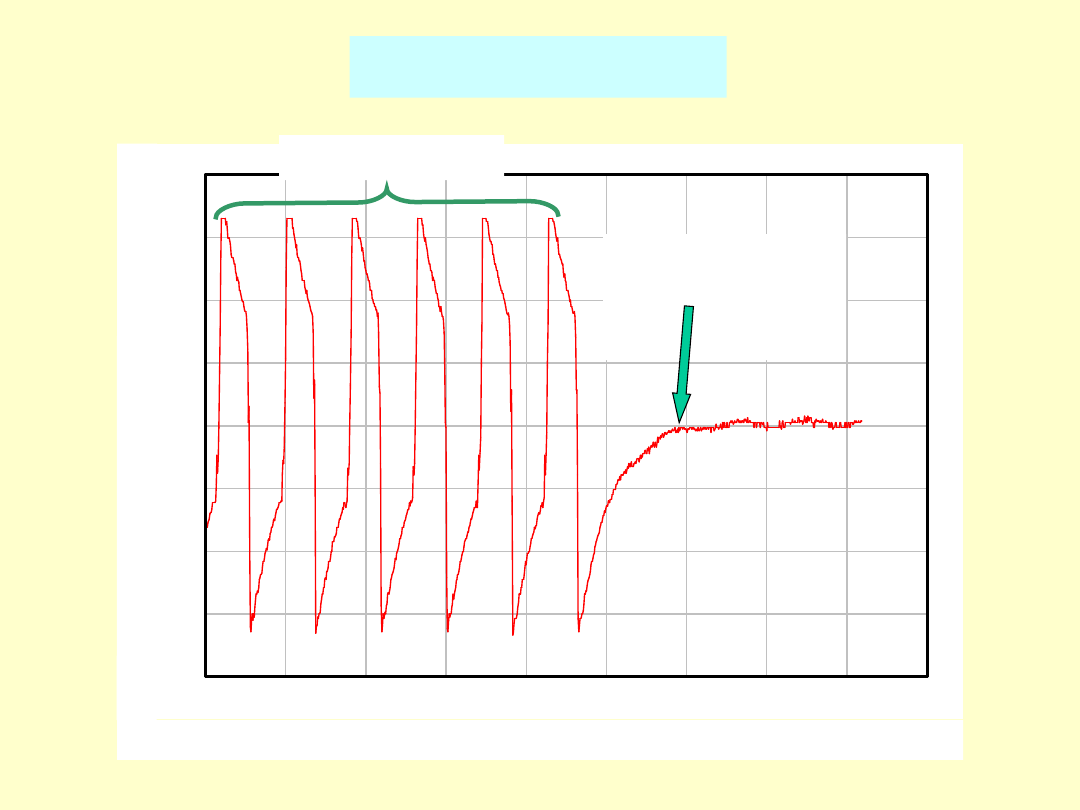
utrata
stabilności
ruchu
stacjonarnego
stabilna praca układu
czas [s]
p
rz
e
m
ie
sz
c
ze
n
ie
[
m
m
]
W czym rzecz ?
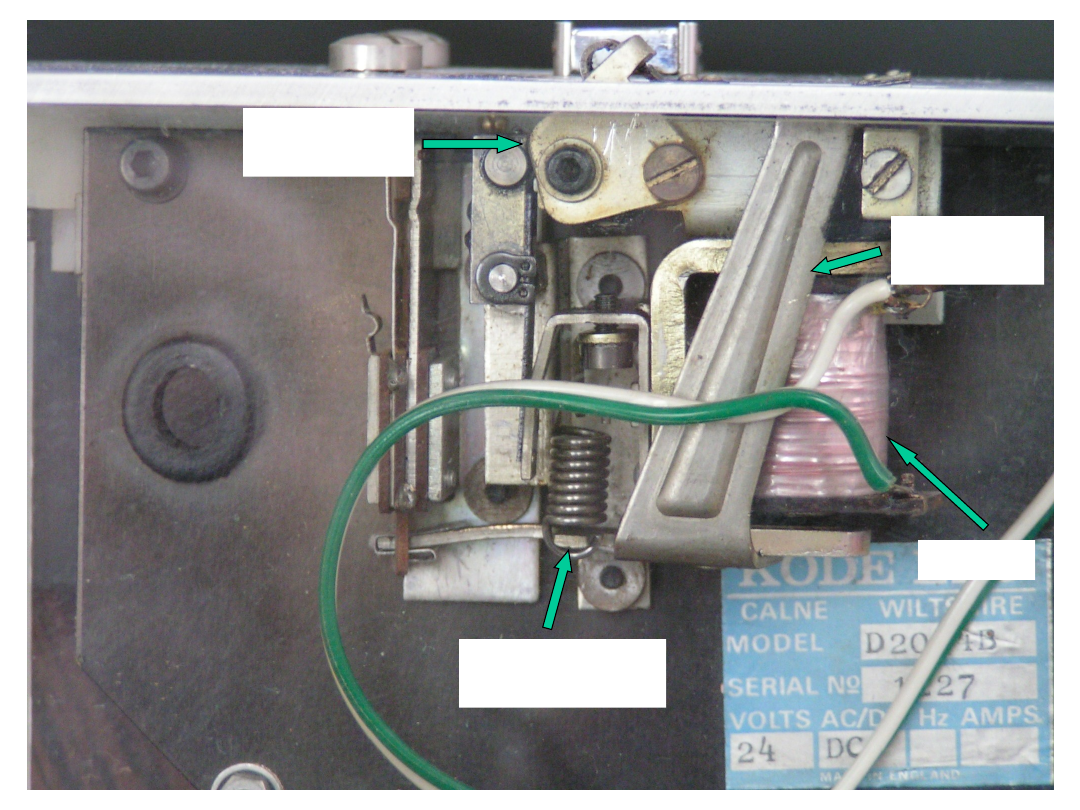
wahacz
kotwicy
mechanizm
zapadkowy
sprężyna
powrotu
cewka
czas [s]
p
rz
e
m
ie
s
z
c
z
e
n
ie
[
m
m
]
Pomiar ps1.dat
0
0.25
0.5
0.75
1
1.25
1.5
1.75
2
2.25
-12
-9
-6
-3
0
3
6
9
12
2A
sz
2A
syg
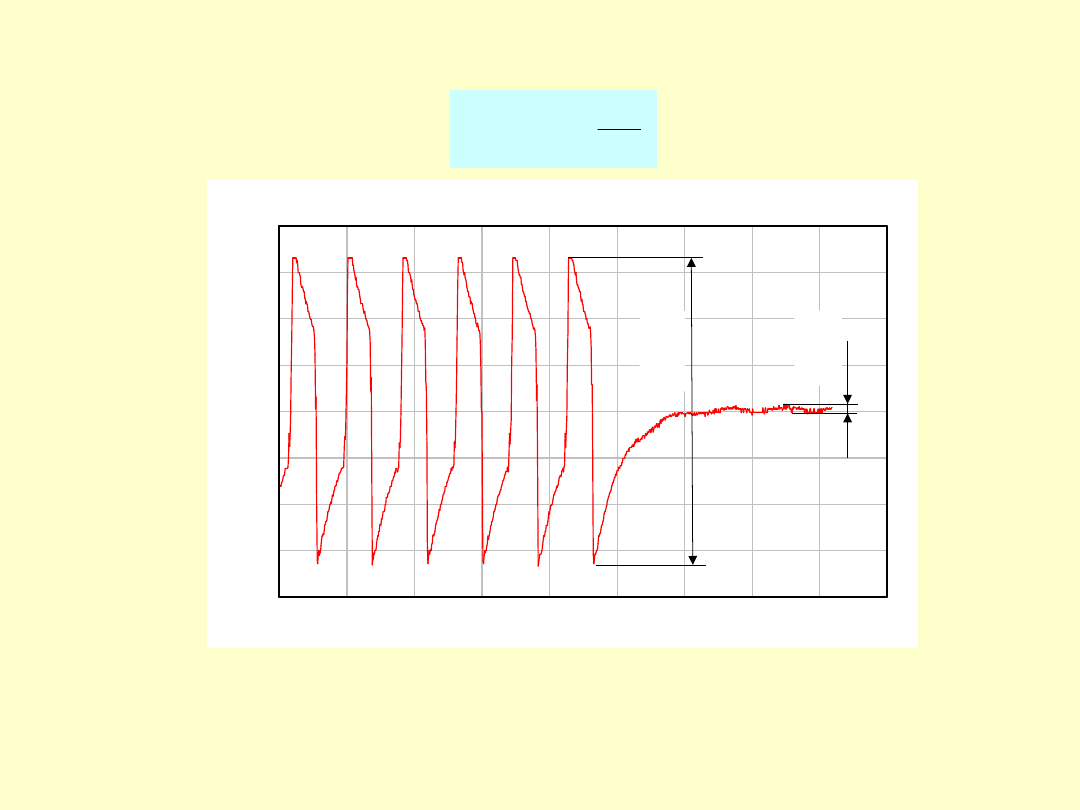
Określenie jakości pomiarów z uwagi na poziom zakłóceń; obliczenia SNR (ang.
Signal to Noise Ratio)
sz
syg
A
A
SNR
log
20
Określenie dynamiki pomiaru przemieszczeń wahacza kotwicy;
pomiar dokonany
czujnikiem laserowym; wymuszenie od układu elektromagnetycznego
zasilanego
sygnałem napięciowym harmonicznym f = 2,6 [Hz] przy U
A
=10 [V];
SNR =31,9 [dB]
czas [s]
p
rz
e
m
ie
s
z
c
z
e
n
ie
[
m
m
]
Pomiar pp2.dat
0
150
300
450
600
750
900
1050
-150
-100
-50
0
50
100
150
2A
sz
2A
syg
Określenie dynamiki pomiaru przemieszczeń wahacza kotwicy;
pomiar dokonany
czujnikiem laserowym; wymuszenie od układu
elektromagnetycznego zasilanego
sygnałem napięciowym prostokątnym f = 8,2 [Hz] przy U
A
=15,5
[V]; SNR = 35,38 [dB]
Symptomy diagnostyczne
(zagadnienie wyboru optymalnego)
Problem miary w diagnostyce
A u nas -
metoda trójparametrowa
- określa się:
A
x max
- wartość szczytowa amplitudy przemieszczeń (drgań)
~
A - wartość skuteczna
A
v max
- wartość szczytowa amplitudy prędkości (drgań)
~
A
RMS
=
T
dt
t
x
T
0
2
)
(
1
92 % trafnych
prognoz
diagnostycznych
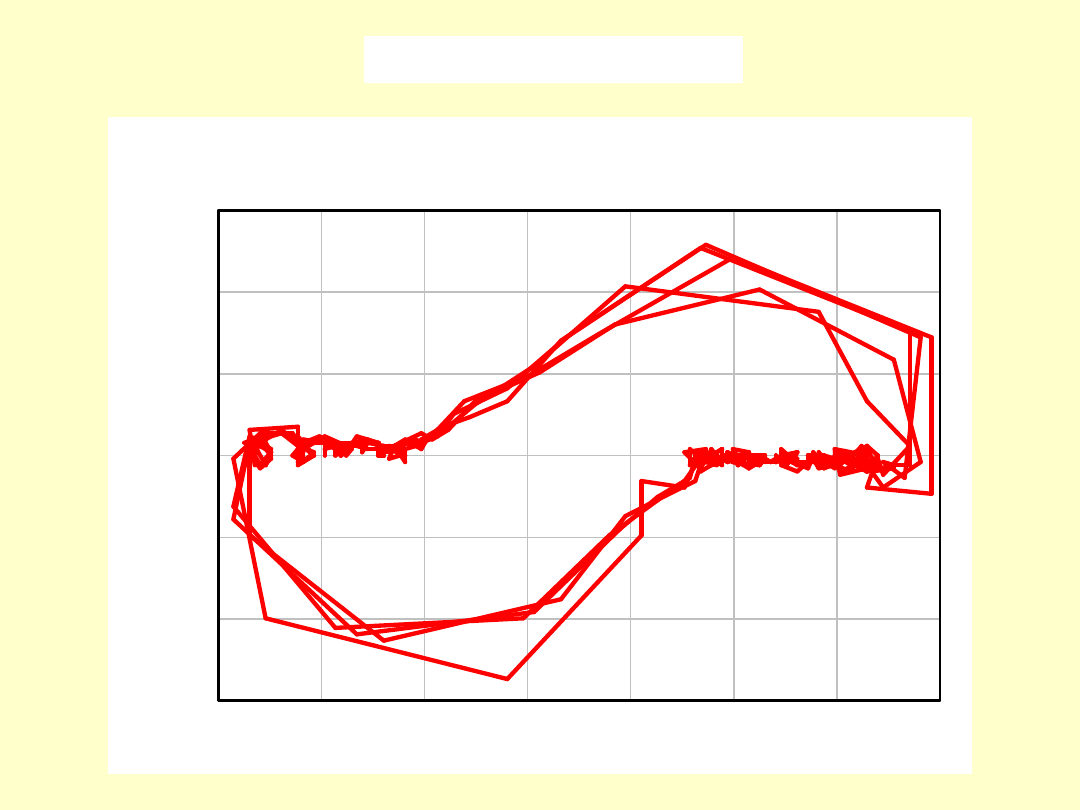
przemieszczenie [mm]
p
rę
d
k
o
ś
ć
[
m
m
/s
]
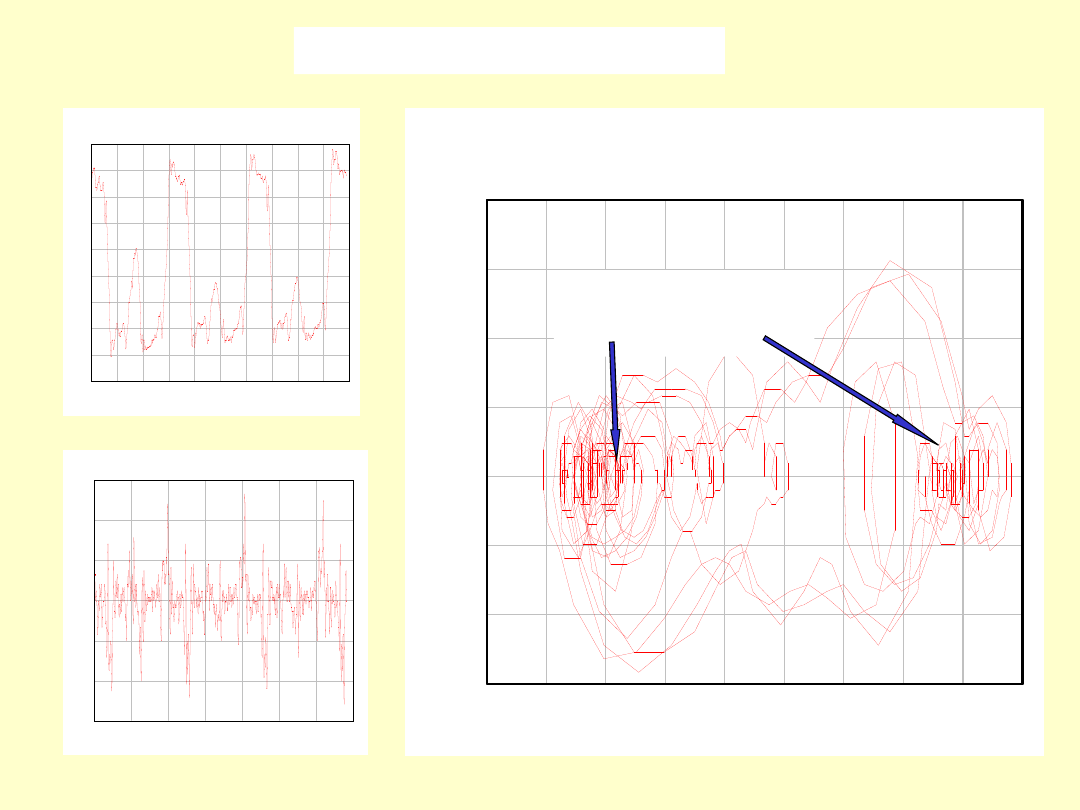
Płaszczyzna fazowa
Pomiar Ps11.dat
-6
-4.5
-3
-1.5
0
1.5
3
4.5
-1500
-1000
-500
0
500
1000
1500
Ruch stabilny układu
czas [s]
p
rę
d
k
o
ś
ć
[
m
m
/s
]
Pomiar Ps11.dat
0
150
300
450
600
750
900
1050
-45
-30
-15
0
15
30
45
czas [s]
a
m
p
lit
u
d
a
[
m
m
]
Pomiar Ps11.dat
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
-7.5
-6
-4.5
-3
-1.5
0
1.5
3
4.5
Ruch stabilny układu
przemieszczenie [mm]
p
rę
d
k
o
ś
ć
[
m
m
/s
]
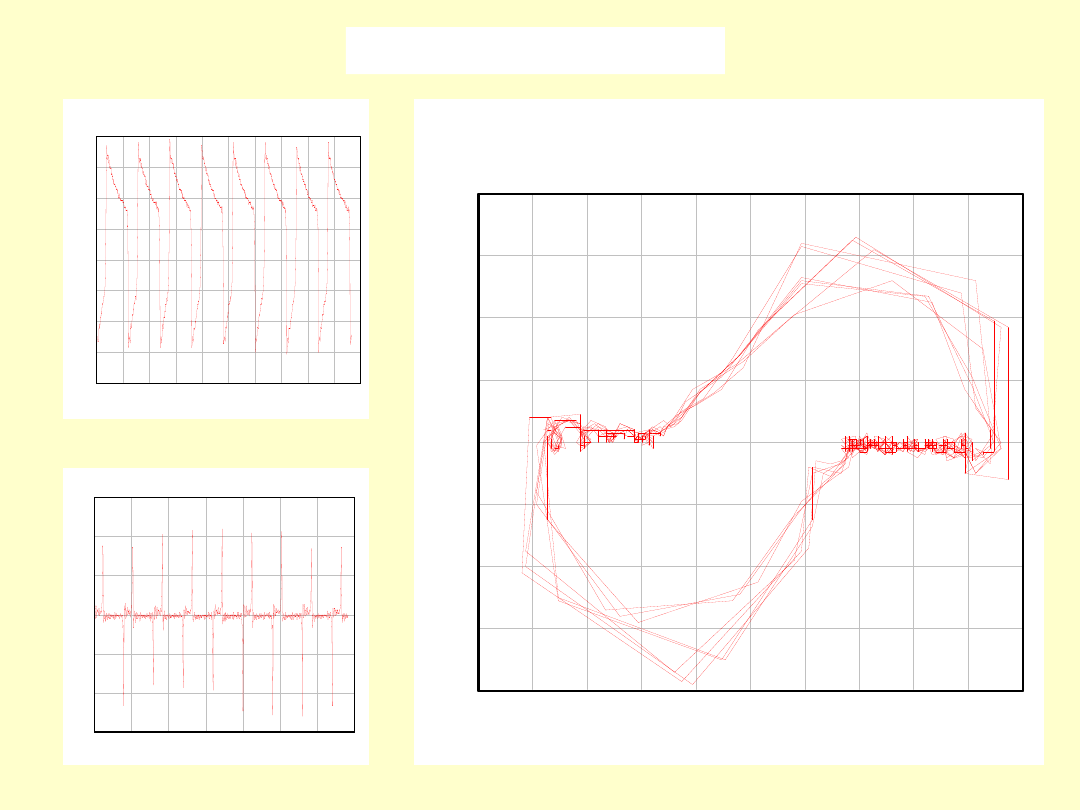
Przestrzeń fazowa
P{omiar Ps11.dat
-90
-75
-60
-45
-30
-15
0
15
30
45
60
-40
-30
-20
-10
0
10
20
30
40
Płaszczyzna fazowa
Pomiar Ps11.dat
czas [s]
p
rę
d
k
o
ść
[
m
m
/s
]
Pomiar Ps24.dat
0
150
300
450
600
750
900
1050
-18
-12
-6
0
6
12
18
czas [s]
a
m
p
lit
u
d
a
[
m
m
]
Pomiar Ps24.dat
0
0.02 0.04 0.06 0.08
0.1
0.12 0.14 0.16 0.18
0.2
-8
-6
-4
-2
0
2
4
6
8
10
przemieszczenie [mm]
p
rę
d
k
o
ś
ć
[
m
m
/s
]
Płaszczyzna fazowa
Pomiar Ps24.dat
-8
-6
-4
-2
0
2
4
6
8
10
-6000
-4000
-2000
0
2000
4000
6000
8000
miejsca, które
wyglądają jak
“atraktory dziwne”
Ruch niestabilny układu
czas [s]
p
rz
e
m
ie
sz
cz
e
n
ie
[
m
m
]
Pomiar Ps11.dat
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
-7.5
-6
-4.5
-3
-1.5
0
1.5
3
4.5
czas [s]
p
rz
e
m
ie
sz
cz
e
n
ie
[
m
m
]
Pomiar Ps11.dat
0.05 0.075 0.1 0.125 0.15 0.175 0.2 0.225 0.25 0.275 0.3 0.325
-6
-4.5
-3
-1.5
0
1.5
3
4.5
czas [s]
o
p
e
ra
to
r
R
M
S
[m
m
]
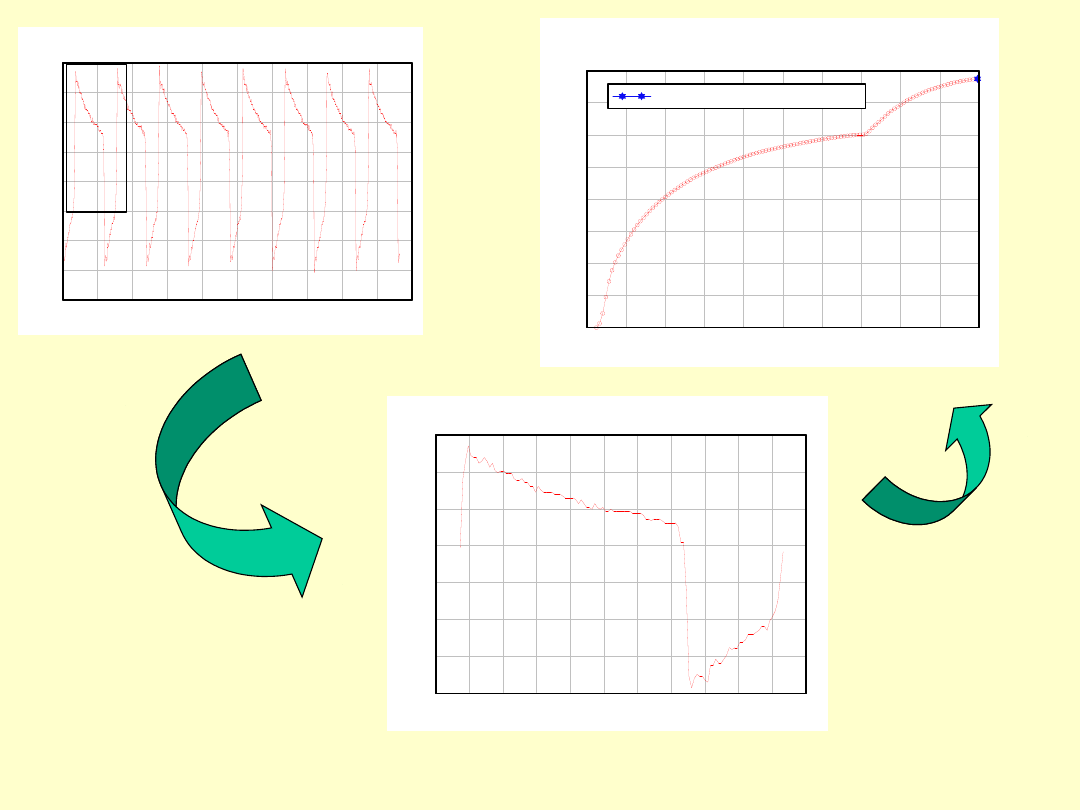
Obliczenie wartości skutecznej RMS
Pomiar Ps11.dat
0.3
0.325 0.35 0.375
0.4
0.425 0.45 0.475
0.5
0.525 0.55
0
0.4
0.8
1.2
1.6
2
2.4
2.8
3.2
wartość średnia RMS; obliczona po okresie
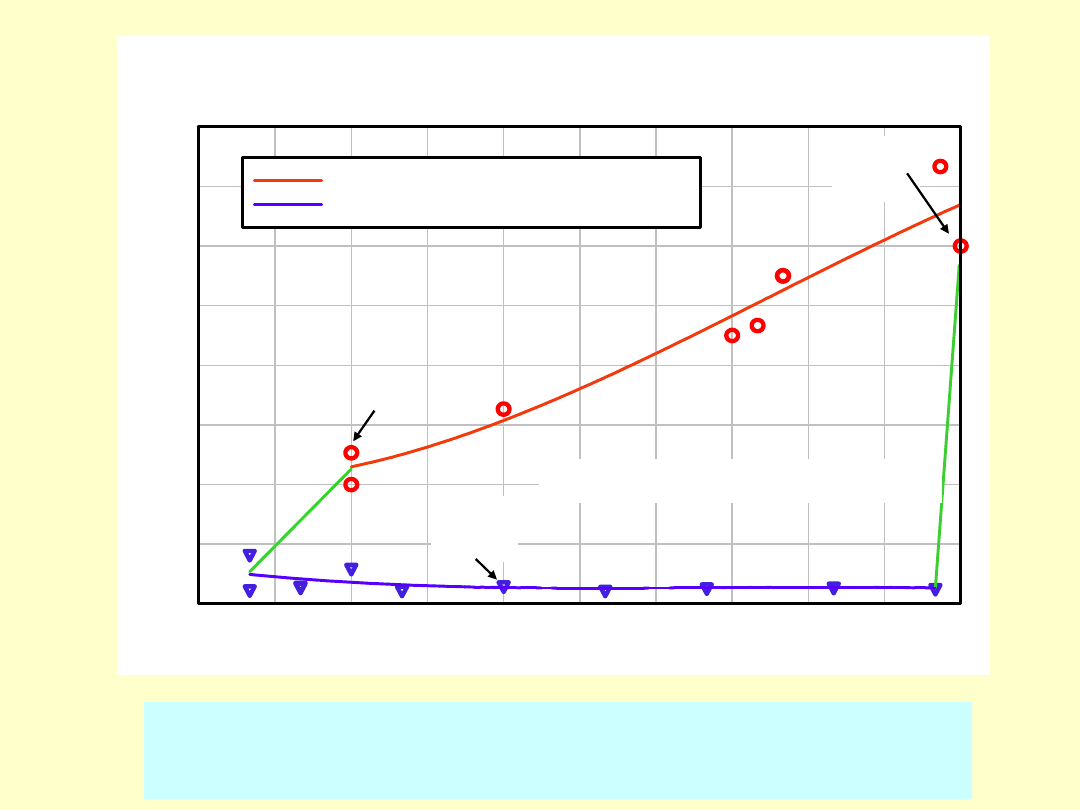
Zakresy pracy urządzenia (stabilnej i niestabilnej)
zobrazowane na wykresie:
częstotliwość - napięcie
zasilające
napięcie [V]
c
z
ę
s
to
tl
iw
o
ś
ć
[
H
z
]
Przestrzeń wielkości sterujących
czytnika taśmy perforowanej
9
10.5
12
13.5
15
16.5
18
19.5
21
22.5
24
0
3
6
9
12
15
18
21
24
obszar stabilności ruchu stacjonarnego
pomiar
ps2
pomiar
ps11
pomiar
ps25
y=19.95-3.245x+0.2239x
2
-0.003688x
3
y=8.064-1.172x+0.06219x
2
-0.001085x
3
Wnioski:
1.
Układ elektromechaniczny badanego mechanizmu
,
pracuje stacjonarnie
w ograniczonym zakresie
częstotliwości i amplitud
wymuszających ruch
roboczy mechanizmu.
2. Metodą doświadczalną,
można obiektywnie określić
zakres stabilności
ruchu stacjonarnego badanego mechanizmu
.(potwierdzono tezę)
3.
Poniżej oraz powyżej
określonych eksperymentalnie
częstotliwości
wymuszających ruch, przy ustalanie amplitudzie
wymuszenia, układ
pracuje niestabilnie
(przy b. niskich częstotliwościach wymuszenia
ruch układu ustaje,
zaś powyżej górnych granicznych wartości częstotliwości pojawia się
najpierw ruch
niestacjonarny a następnie ruch zanika).
3. Prezentacje wyników badań ruchu mechanizmu na
płaszczyźnie fazowej,
pozwoliły
zaobserwować w okresie ruchu niestacjonarnego
,
występowanie
“obiektów”
klasy “dziwnych atraktorów”
- cecha ruchu
chaotycznego.
4. Brak widm i charakterystyk referencyjnych
nie pozwalał
na
poprawne
sformułowanie wniosków dotyczących
oceny stopnia
zużycia
układu.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
Wyszukiwarka
Podobne podstrony:
prezent dla dziadka
Pomysły na prezenty dla?bci i dziadka
ztzk prezent dla mamy id 593185 Nieznany
Jak wybrać prezent dla dziecka
EKG-12 odprowadzeń, Prezentacje dla ratownika
plan prezentacji dla?bki
Zabawy, Prezent dla mamy taty, PREZENT DLA MAMY/TATY
jakby miq zapomniał -REFERAT, prezentacja dla marty
Gladiator recenzja, Gotowe prezentacje (dla leniwych)
Prezentacja dla maturzystów DEMOKRACJA
Algorytm resuscytacyjny u dzieci, Prezentacje dla ratownika
Oparzenie dzielimy na dwa czynniki 1, Prezentacje dla ratownika
LEKI STOSOWANE W INTENSYWNEJ OPIECE KARDIOLOGICZNEJ, Prezentacje dla ratownika
Prezenty dla młodych
niewydolność oddechowa prezentacja dla studentow
Prezentacja dla studentów
więcej podobnych podstron