
T12. Kinematyka bryły
Stopnie swobody bryły sztywnej.
Opis ruchu bryły sztywnej.
Ruch płaski bryły sztywnej.
Mechanizmy płaskie.
0
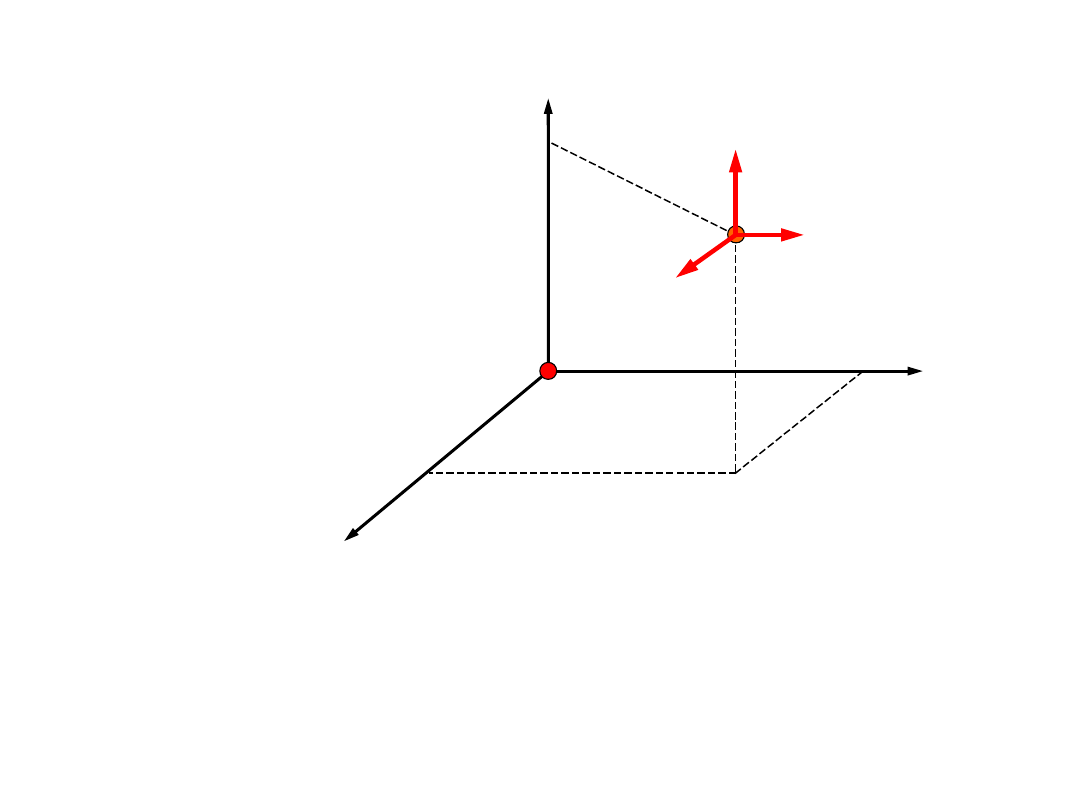
Punkt materialny może przemieszczać się w
trzech kierunkach przestrzeni. Dowolny ruch
punktu materialnego możemy przedstawić jako
złożenie trzech ruchów wzdłuż osi układu
współrzędnych. Mówimy, że punkt materialny
posiada trzy
stopnie swobody
.
( )
y t
( )
x t
( )
z t
x
y
z
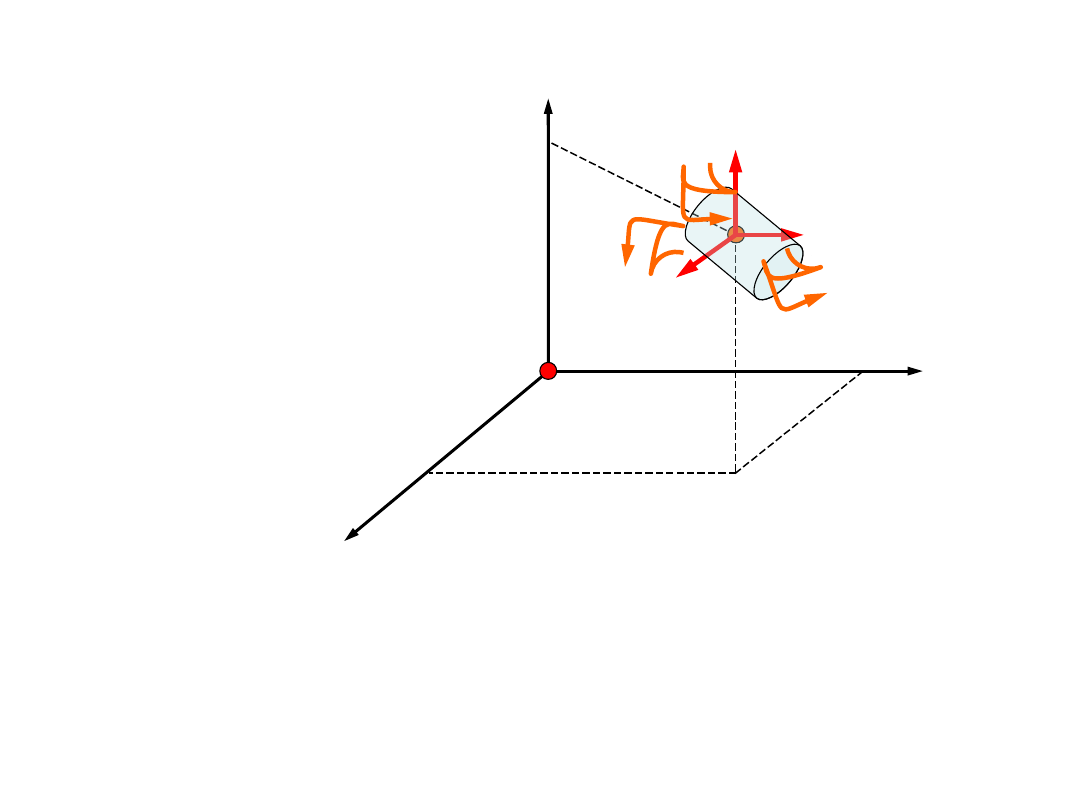
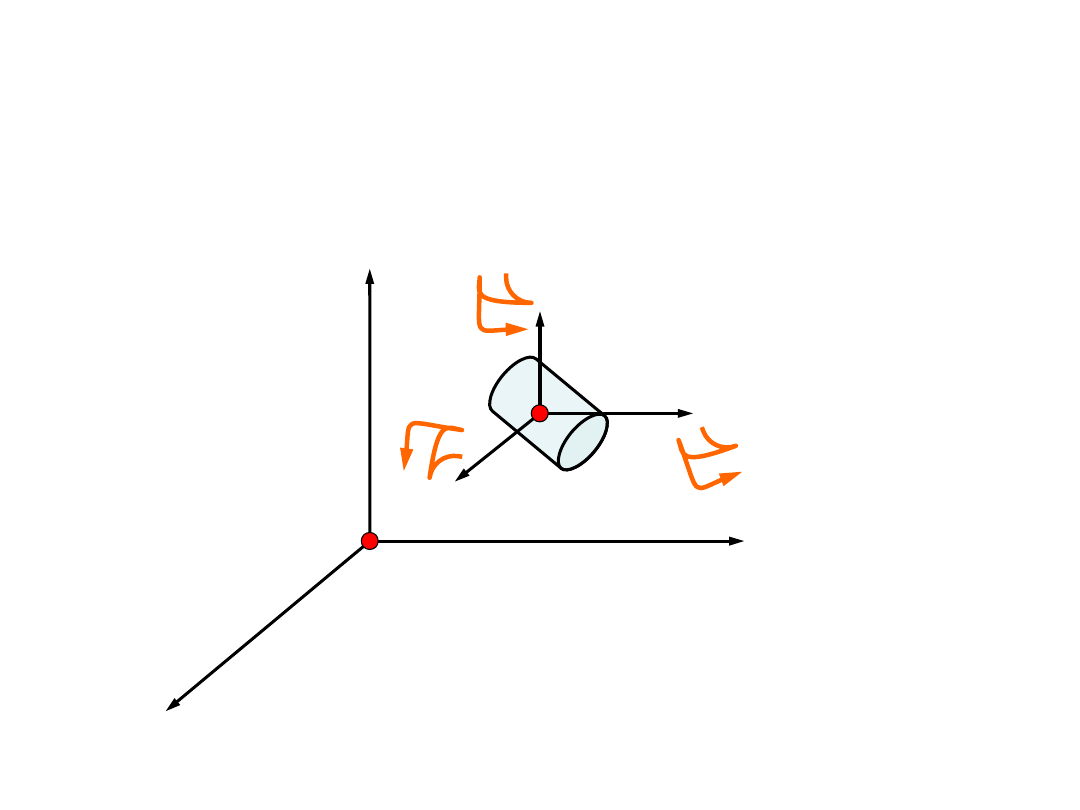
Stopnie swobody bryły sztywnej
0
Bryła sztywna, oprócz ruchu w trzech
kierunkach przestrzeni, może także obracać się
wokół trzech osi. Dlatego posiada dodatkowe
trzy stopnie swobody. W sumie, ma
sześć stopni
swobody
– trzy
translacyjne
i trzy
rotacyjne.
( )
y t
( )
x t
( )
z t
x
y
z
Stopnie swobody bryły sztywnej
0
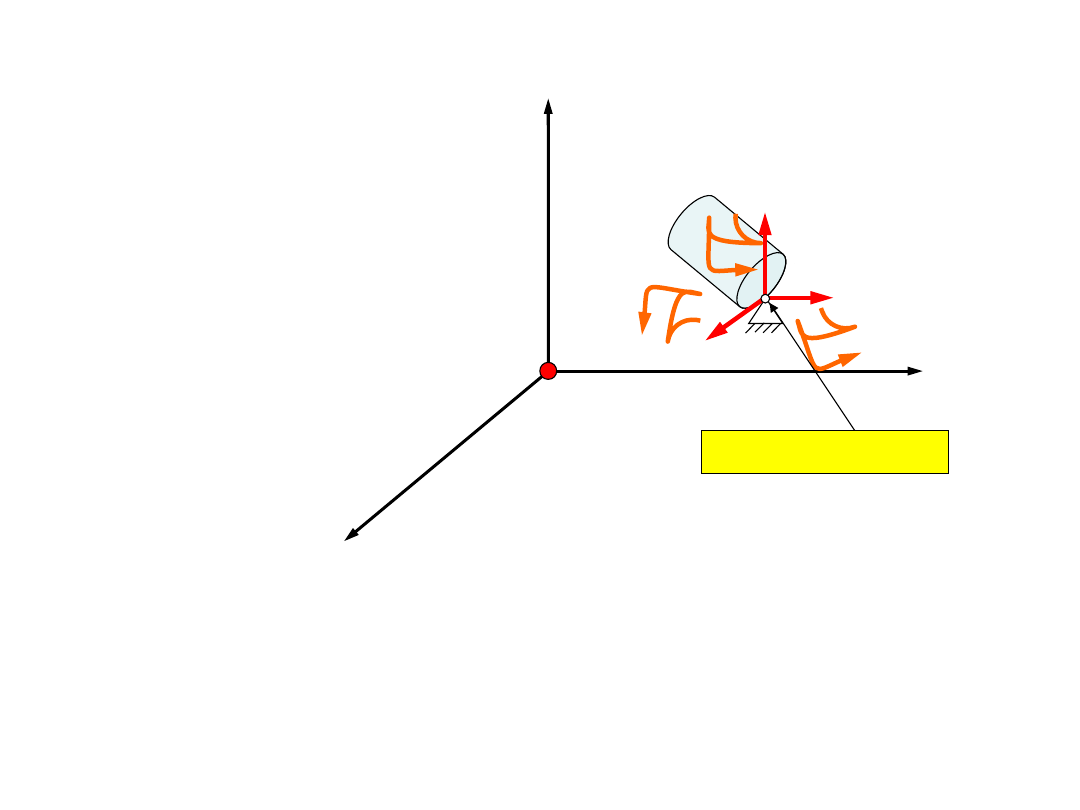
Jeżeli na bryłę sztywną nałożymy więzy w
postaci przegubu kulowego, będzie mogła
jedynie obracać się wokół trzech osi. Liczba
stopni swobody zostanie ograniczona do trzech.
x
y
z
przegub kulowy
Stopnie swobody bryły sztywnej
Stopnie swobody bryły sztywnej
0
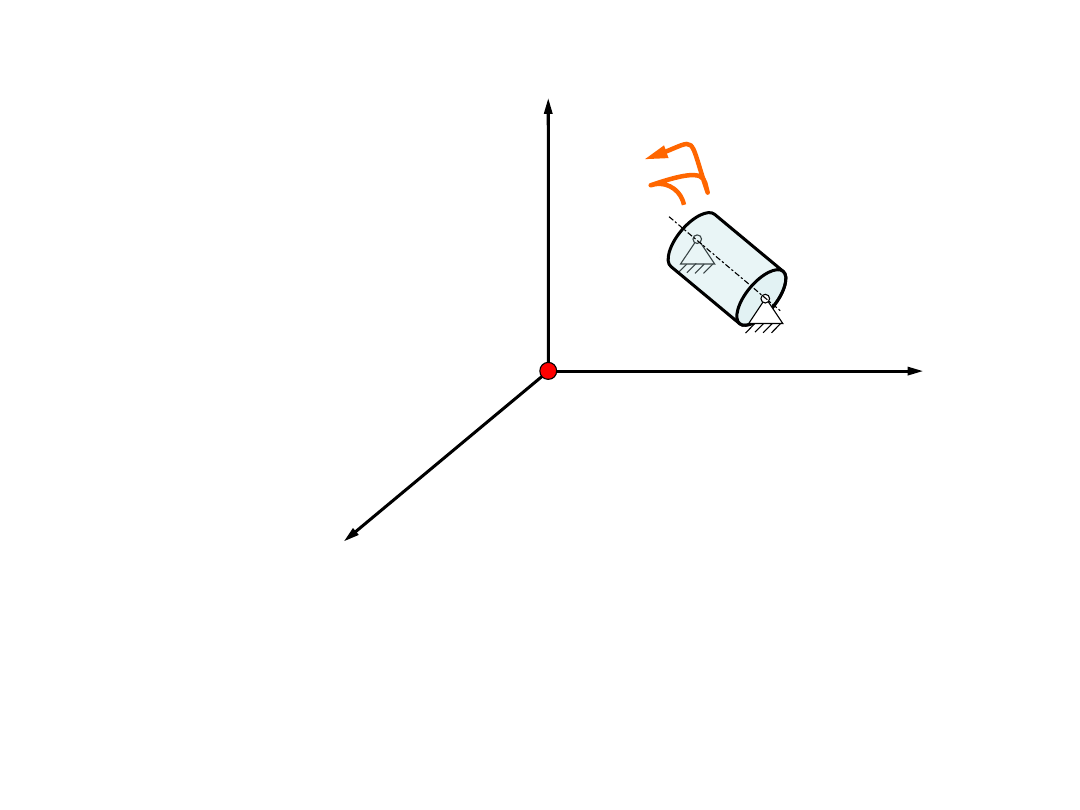
Jeżeli na bryłę sztywną nałożymy więzy, które
ustalą położenie w przestrzeni dwóch punktów
bryły, możliwy jest wówczas jedynie ruch wokół
jednej osi. Liczba stopni swobody została
zredukowana do jednego.
x
y
z
Opis ruchu bryły
sztywnej
0
Problem
Jak opisać matematycznie ruch bryły sztywnej ?
x
y
z
x
1
y
1
z
1
0
1
Układ współrzędnych x
1
, y
1
, z
1
jest
związany z wybranym punktem
bryły 0
1
. Punkt ten nazywamy
biegunem
.

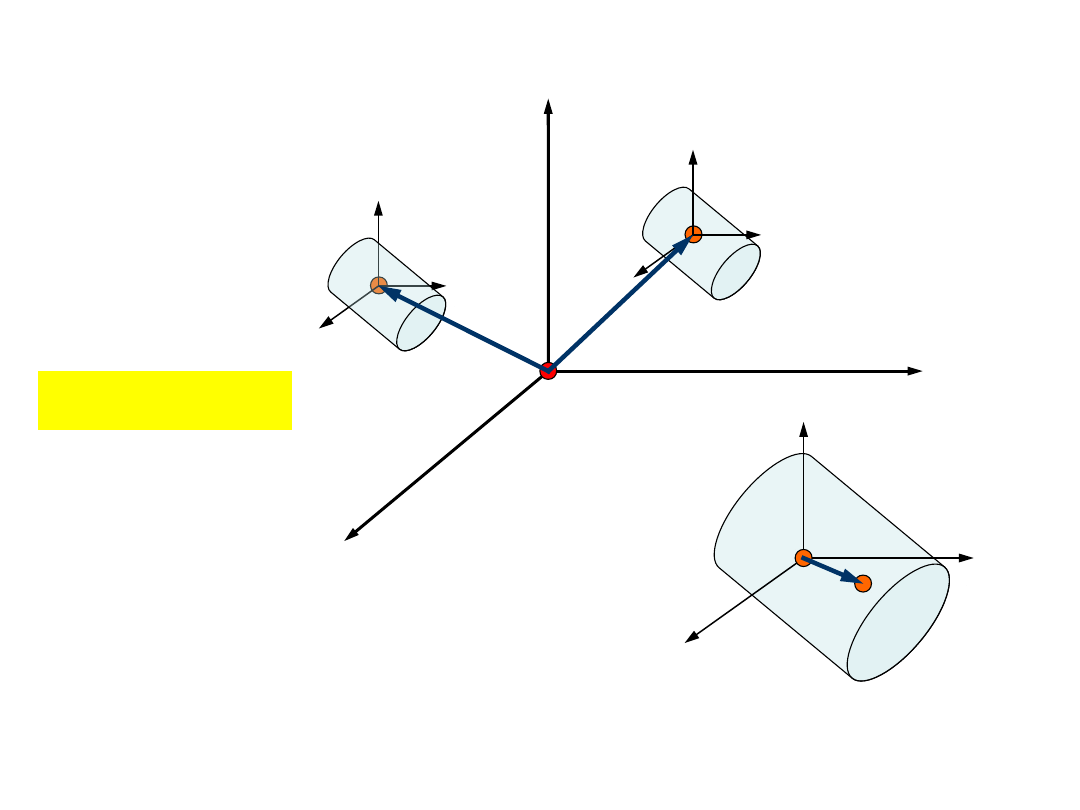
Opis ruchu bryły
sztywnej
Wniosek
Ruch bryły sztywnej możemy opisywać jako
złożenie ruchu wybranego punktu bryły 0
1
i
obrotu bryły wokół osi układu współrzędnych
związanego z punktem 0
1
.
Jeżeli bryła nie obraca się względem osi układu
współrzędnych związanego z punktem 0
1
, ruch
bryły nazywamy
ruchem postępowym
.
Jeżeli wybrany punkt bryły 0
1
nie porusza się
względem układu odniesienia, zaś bryła obraca
się względem osi układu współrzędnych
związanego z punktem 0
1
, ruch bryły nazywamy
ruchem obrotowym
.
Dowolny ruch bryły sztywnej można opisywać,
jako złożenie ruchu postępowego i ruchu
obrotowego.
0
( )
r t
r
x
y
z
Opis ruchu bryły
sztywnej
(0)
r
r
0
1
0
1
Ruch postępowy
1
r
r
x
1
y
1
z
1
A
Położenie punktu A w układzie
ruchomym opisuje niezmienny w
czasie promień wodzący . Położenie
w chwili czasu t punktu A opisuje
suma
wektorowa
promienia
wodzącego i wektora
.
1
r
r
( )
r t
r
1
r
r
1
( )
( )
A
r t
r t
r
=
+
r
r
r
0
1

Opis ruchu bryły
sztywnej
Zagadnienie opisu ruchu postępowego bryły
sztywnej sprowadza się do rozwiązania równań
ruchu punktu materialnego 0
1
oraz do czysto
geometrycznego opisu położenia punktów
bryły sztywnej względem punktu 0
1
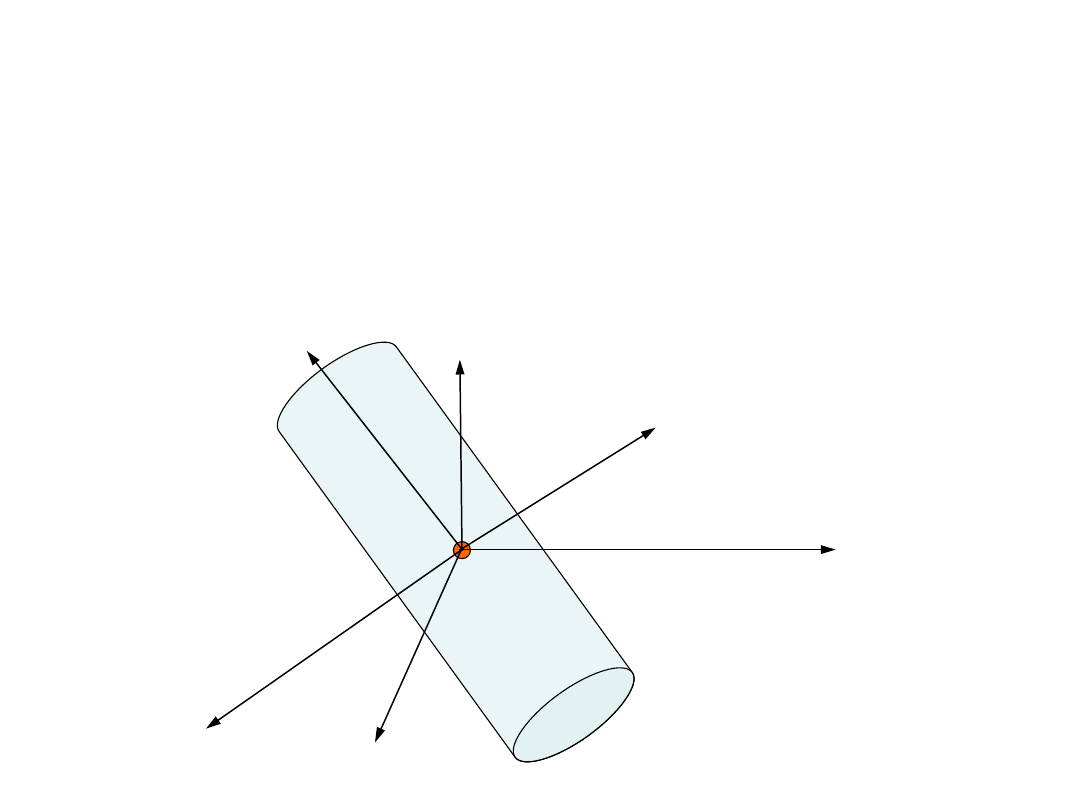
Opis ruchu bryły
sztywnej
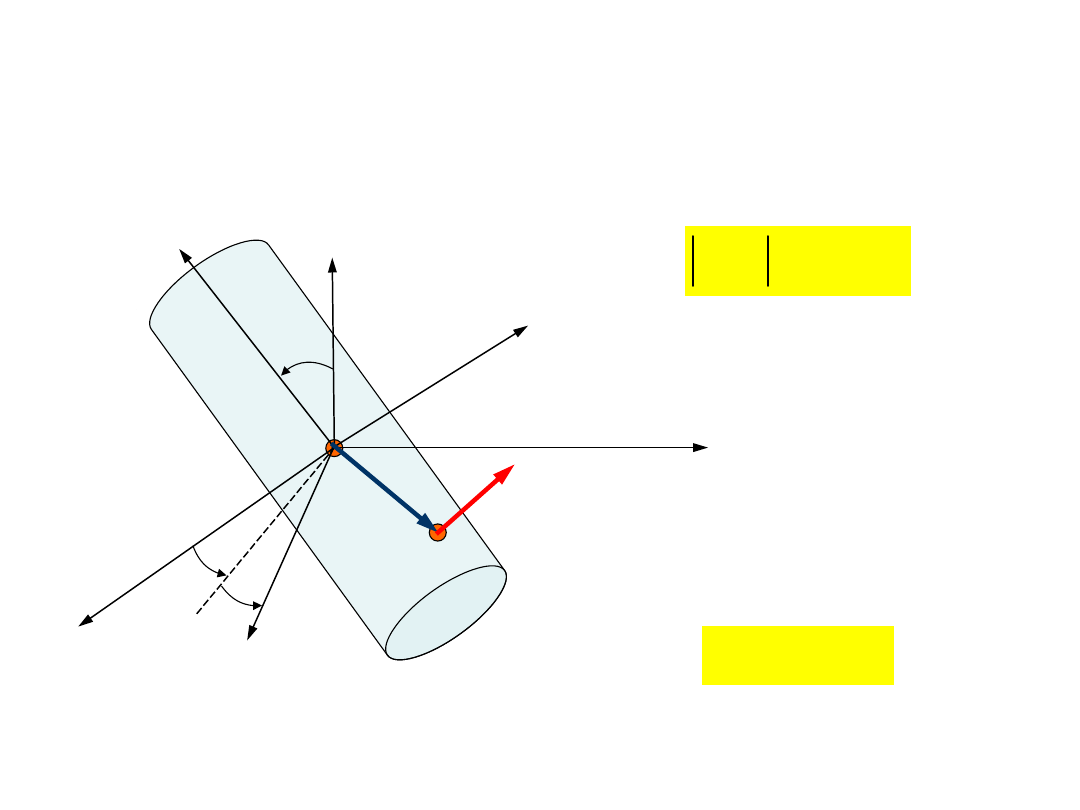
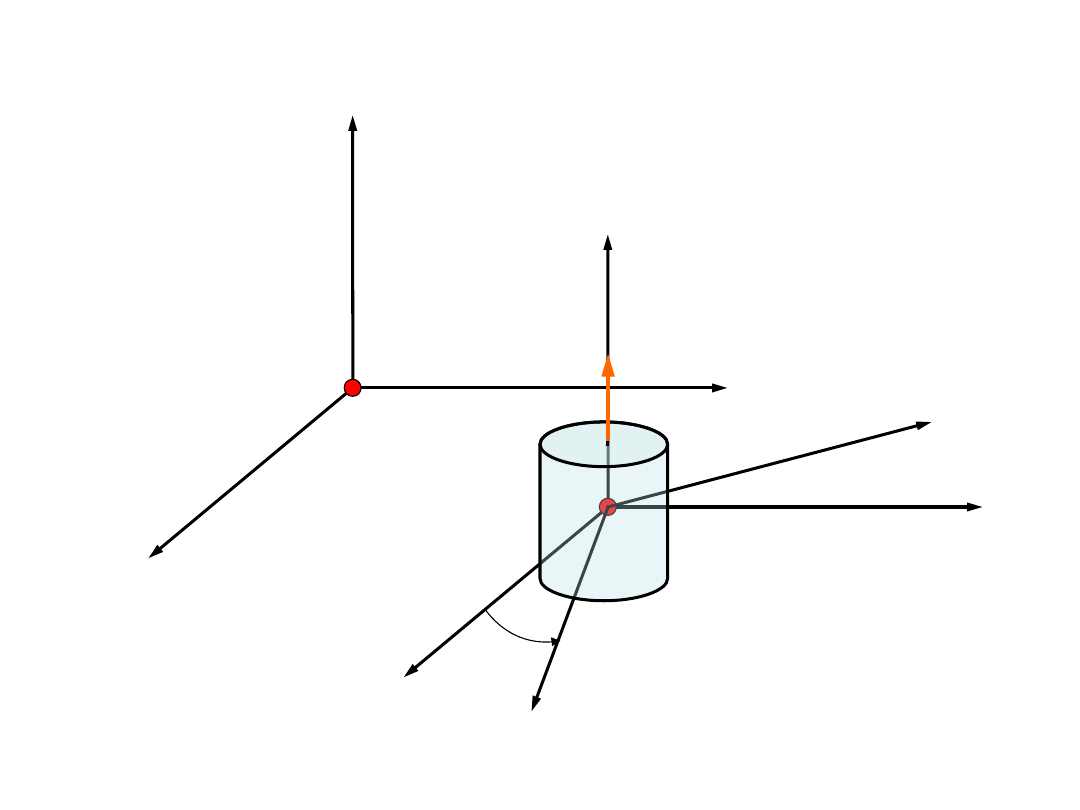
Dla
uproszczenia
sposobu
wyznaczania
położenia punktów bryły sztywnej w układzie
związanym z punktem 0
1
, celowe jest czasami
wprowadzenie
dodatkowego
układu
współrzędnych, dopasowanego do kształtu
bryły.
y
1
0
1
x
1
z
1
x
h
V
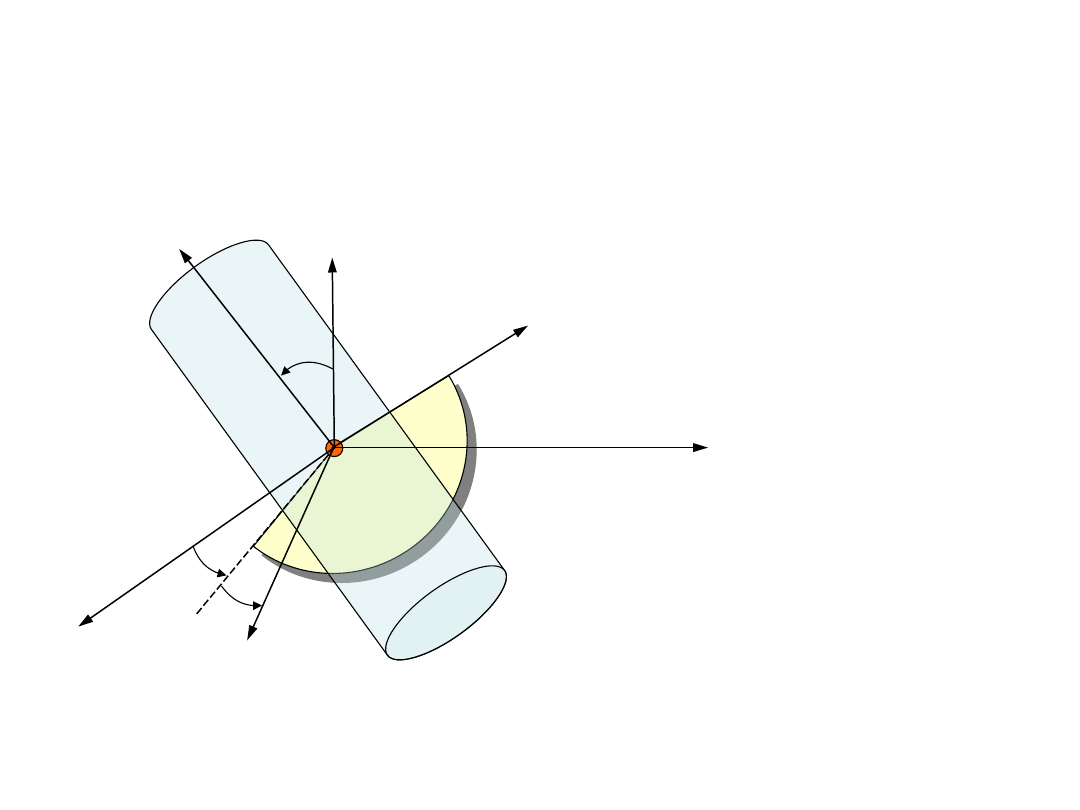
Opis ruchu bryły
sztywnej
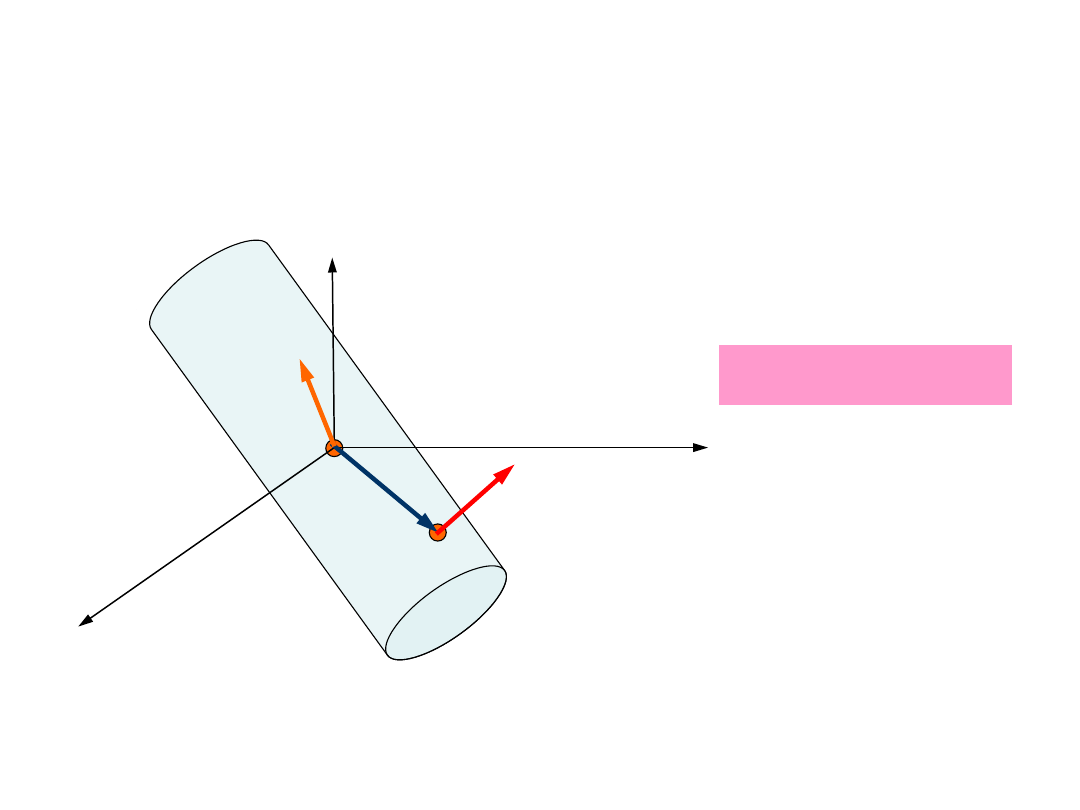
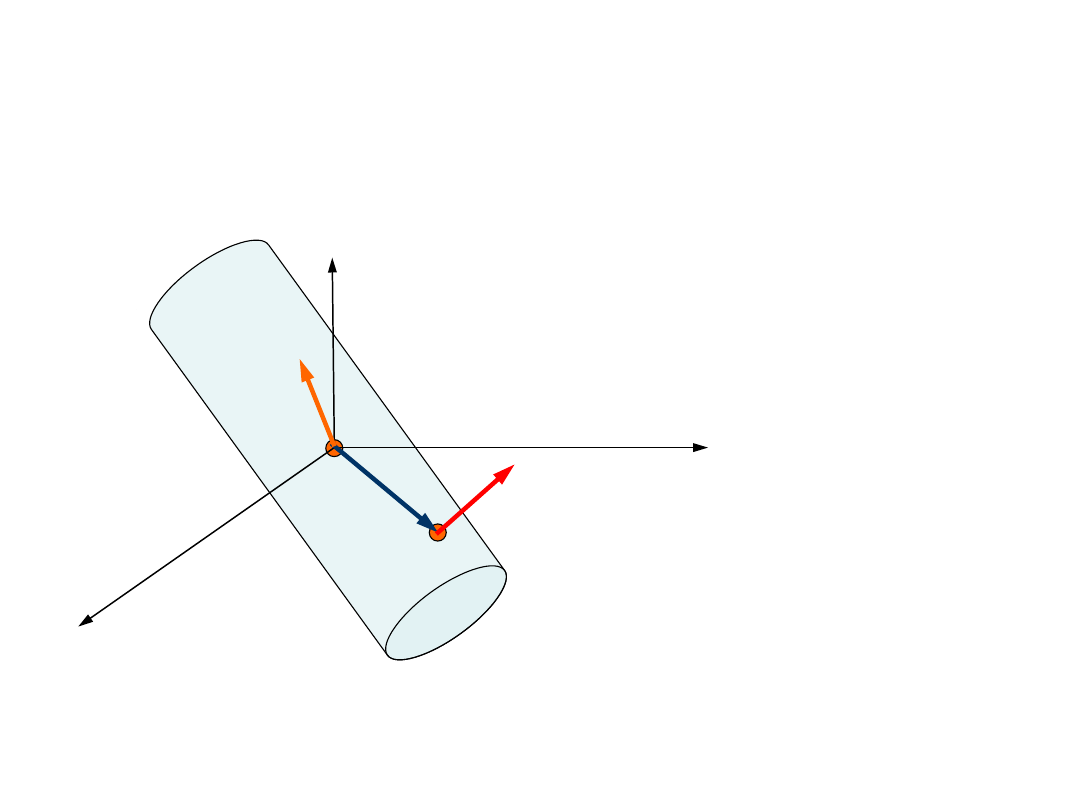
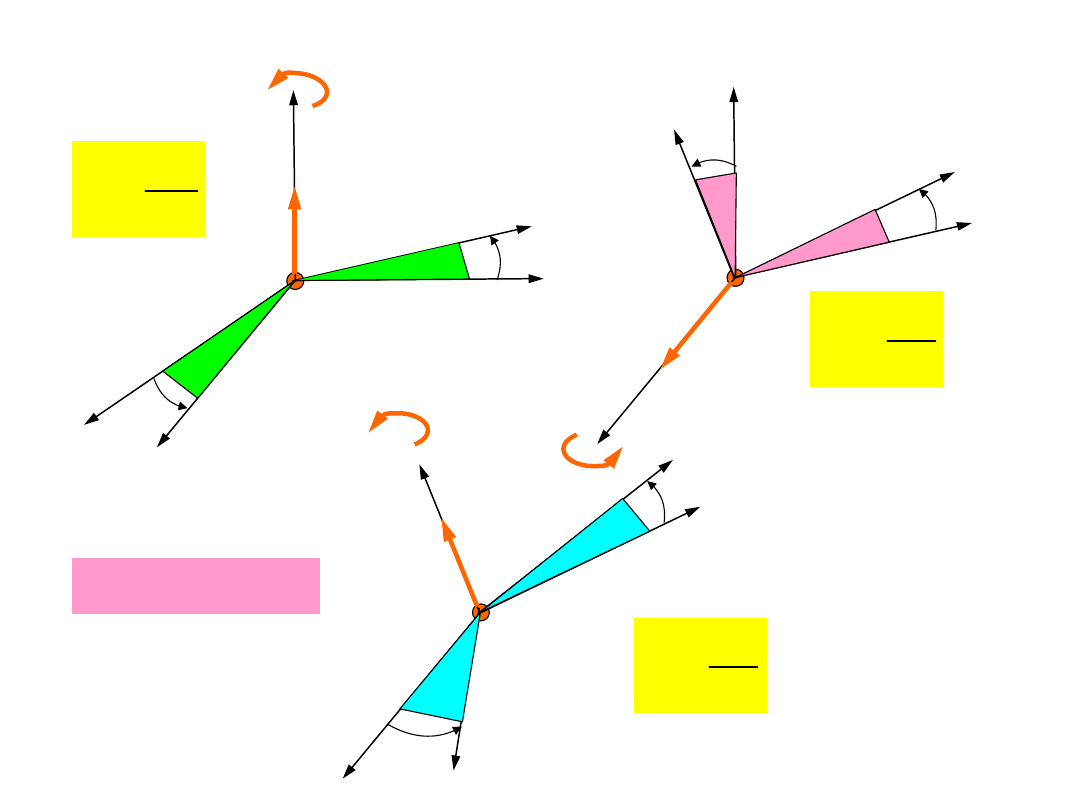
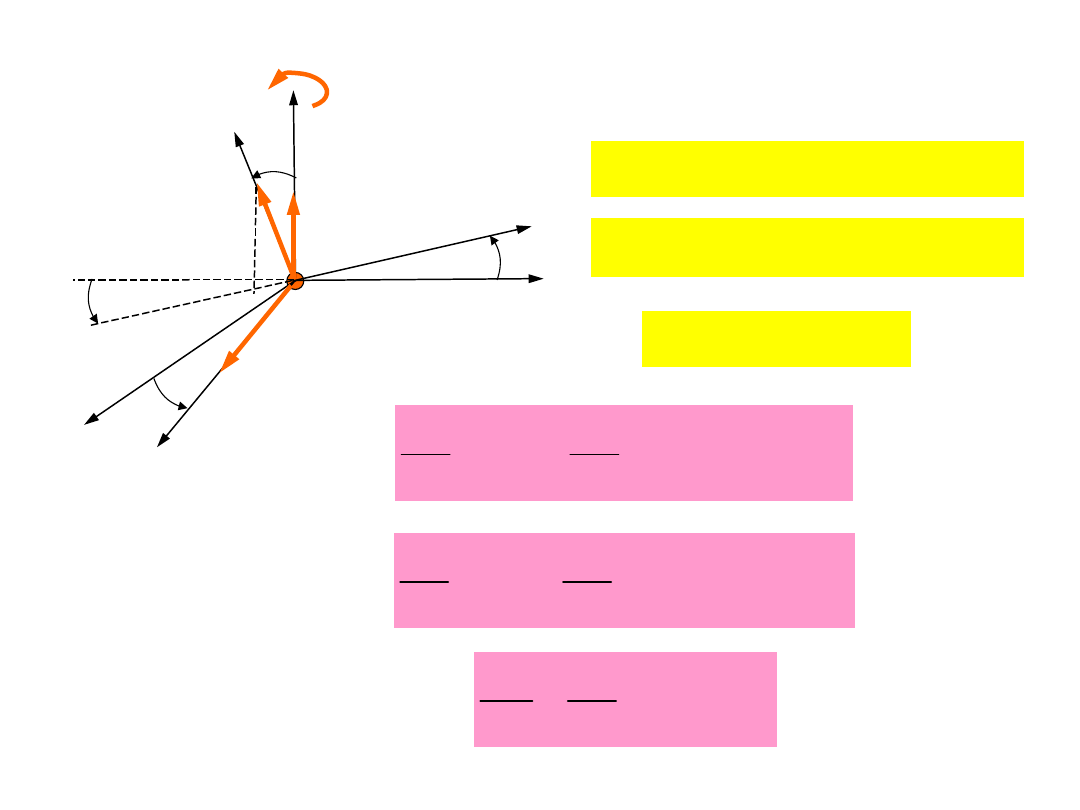
Kąty Eulera
:
- kąt nutacji
– kąt precesji
– kąt obrotu
własnego
y
1
0
1
x
1
z
1
x
h
V
N
y
j
J
Znając współrzędne
danego punktu bryły oraz kąty
Eulera, możemy wyznaczyć
wartości współrzędnych x
1
, y
1
,
z
1
określające
położenie
punktu względem punktu 0
1
.
Linia 0
1
N stanowi ślad
przecięcia płaszczyzny x
1
y
1
przez płaszczyznę
Opis ruchu bryły
sztywnej
y
1
0
1
x
1
z
1
x
h
V
N
y
j
J
Ruch
obrotowy
A
1
( )
r t
r
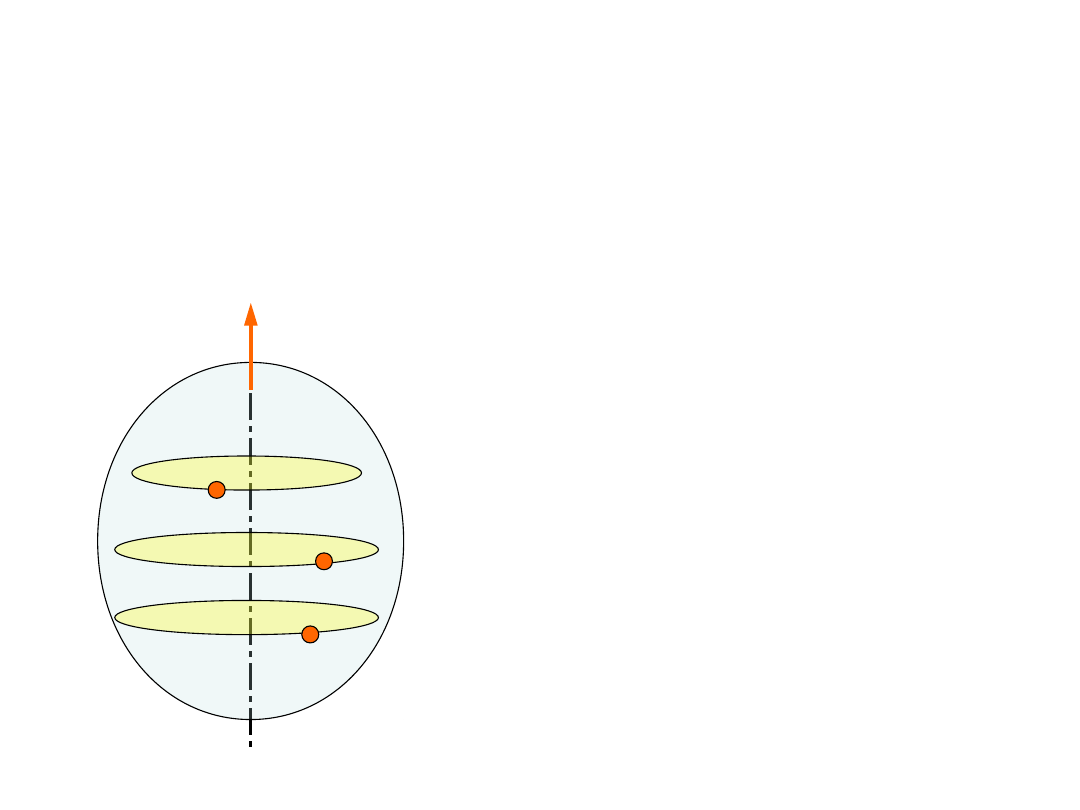
Ponieważ odległość punktów A i 0
1
jest stała, punkt A porusza się po
powierzchni kuli o promieniu:
( )
u t
r
1
( )
r t
const
=
r
Dla każdego położenia punktu
A punkt 0
1
stanowi środek
krzywizny toru punktu A.
Zatem:
1
( )
( )
t
r t
r
=
r
r
Ruch punktów bryły sztywnej w ruchu
obrotowym jest
ruchem kulistym
Opis ruchu bryły
sztywnej
y
1
0
1
x
1
z
1
A
1
( )
r t
r
( )
u t
r
( )
t
w
r
1
( )
( )
( )
u t
t r t
w
=
�
r
r
r
Ruch
obrotowy
Opis ruchu bryły
sztywnej
y
1
0
1
x
1
z
1
Ruch
obrotowy
A
1
( )
r t
r
Punkty materialne leżące na linii 0
1
A
nie zmieniają swojego wzajemnego
położenia. Zatem punkty te poruszają
się z tą samą prędkością kątową co
punkt A.
( )
u t
r
( )
t
w
r
( )
B
r t
r
Opis ruchu bryły
sztywnej
y
1
0
1
x
1
z
1
A
( )
A
r t
r
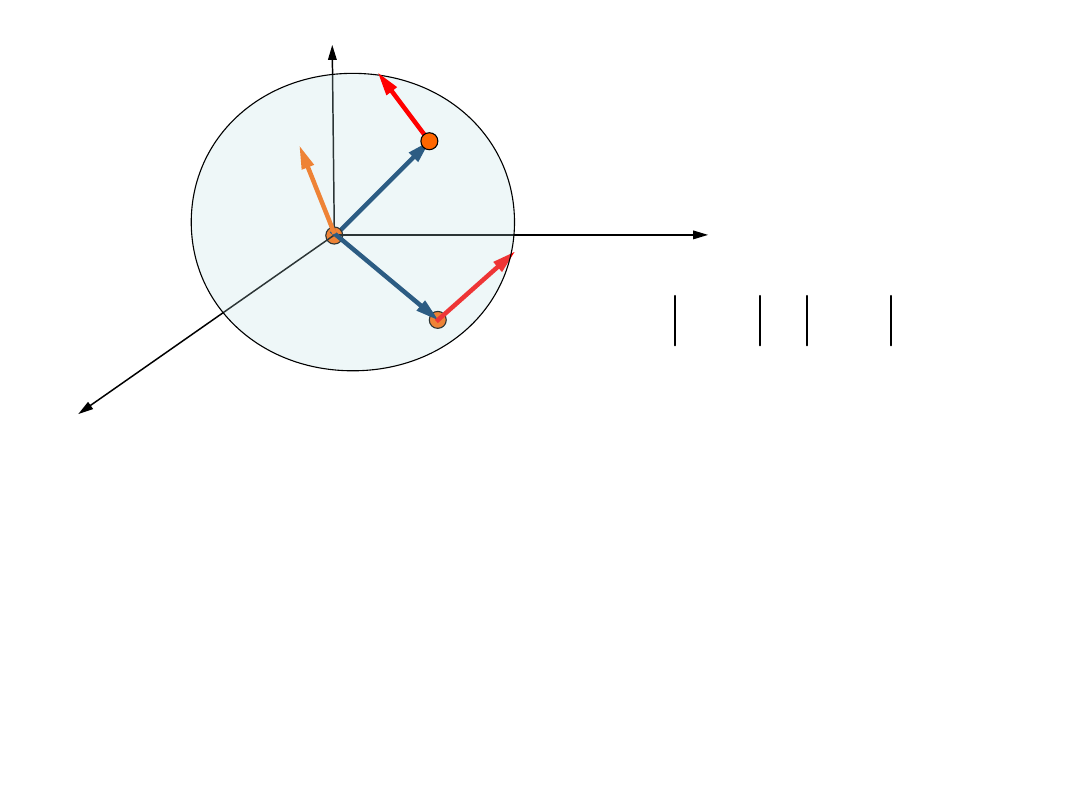
Rozpatrzmy ruch punktów materialnych A i B, równo odległych
od punktu 0
1
. Ich położenia w kolejnych chwilach czasu leżą na
tej samej kuli. Ponieważ kąt pomiędzy promieniami wodzącymi
nie może się zmienić, punkty muszą poruszać się z tą samą
prędkością kątową.
( )
u t
r
( )
t
w
r
B
Wniosek:
W ruchu obrotowym bryły sztywnej, wszystkie punkty bryły
poruszają się z tą samą prędkością kątową.
i
A
B
r r
r r
( )
( )
A
B
r t
r t
=
r
r
Opis ruchu bryły
sztywnej
Wniosek:
Wszystkie punkty bryły sztywnej obracają się w danym momencie
czasu wokół tej samej
chwilowej osi obrotu
, której kierunek
wyznacza wektor prędkości kątowej. Zmiany położenia chwilowej
osi obrotu określa wektor przyspieszenia kątowego.
( )
d
t
dt
w
e
=
r
r
( )
( )
( )
,
,
y
x
z
x
y
z
d
d
d
t
t
t
dt
dt
dt
w
w
w
e
e
e
=
=
=
Opis ruchu bryły
sztywnej
y
1
0
1
x
1
z
1
h�
y
y
x�
1
w
1
d
dt
y
w =
0
1
h�
J
x�
h�
�
J
V
z
1
2
w
2
d
dt
J
w =
0
1
h
j
x�
h�
�
J
V
x
j
3
d
dt
j
w =
3
w
1
2
3
w w w w
= + +
r
r
r
r
Opis ruchu bryły
sztywnej
y
1
0
1
x
1
z
1
y
x�
1
w
2
w
V
3
w
h�
y
2
3
cos
sin sin
x
w w
y w
J
y
=
+
2
3
sin
sin cos
y
w w
y w
J
y
=
-
1
3
cos
z
w w w
J
= +
cos
sin sin
x
d
d
dt
dt
J
j
y
J
y
w
+
=
J
sin
sin cos
y
d
d
dt
dt
J
j
y
J
y
w
-
=
cos
z
d
d
dt
dt
y
j
J
w
+
=
y
Opis ruchu bryły
sztywnej
cos
sin sin
sin
sin cos
cos
x
y
z
d
d
dt
dt
d
d
dt
dt
d
d
dt
dt
J
j
y
J
y
w
J
j
y
J
y
w
y
j
J
w
+
=
-
=
+
=
( )
( )
( )
,
,
y
x
z
x
y
z
d
d
d
t
t
t
dt
dt
dt
w
w
w
e
e
e
=
=
=
0
0
0
0
0
0
(0)
,
(0)
,
(0)
(0)
,
(0)
,
(0)
x
x
y
y
z
z
w
w
w
w
w
w
y
y
J
J
j
j
=
=
=
=
=
=

Ruch płaski bryły
sztywnej
Ruchem płaskim
bryły sztywnej nazywamy ruch, w
którym wszystkie punkty bryły sztywnej wykonują
ruch płaski
Ruch płaski bryły
sztywnej
0
x
y
z
0
1
x
1
y
1
z
1
w
h
x
j
Ruch płaski bryły
sztywnej
1. Początek ruchomego układu współrzędnych 0
1
porusza się ruchem płaskim.
2. Wektor prędkości kątowej jest prostopadły do
płaszczyzny ruchu punktu 0
1
.
w
W płaskim ruchu obrotowym
punkty bryły poruszają się po
współosiowych okręgach

Ruch płaski bryły
sztywnej
0
1
0
1
( , , )
( )
( , , )
( , , )
( )
( , , )
x
t
x t
x
t
y
t
y t
y
t
x h
x h
x h
x h
=
+
=
+
1
1
( , , )
cos ( )
sin ( )
( , , )
sin ( )
cos ( )
x
t
t
t
y
t
t
t
x h
x
j
h
j
x h
x
j
h
j
=
-
=
+
0
0
0
0
0
0
0
0
( ),
( )
( ),
( ),
( ),
( )
y
x
x
x
x
y
d
d
t
t
dt
dt
du
dx
dy
du
u t
u t
a t
a t
dt
dt
dt
dt
j
w
w
e
=
=
=
=
=
=
Ruch płaski bryły
sztywnej
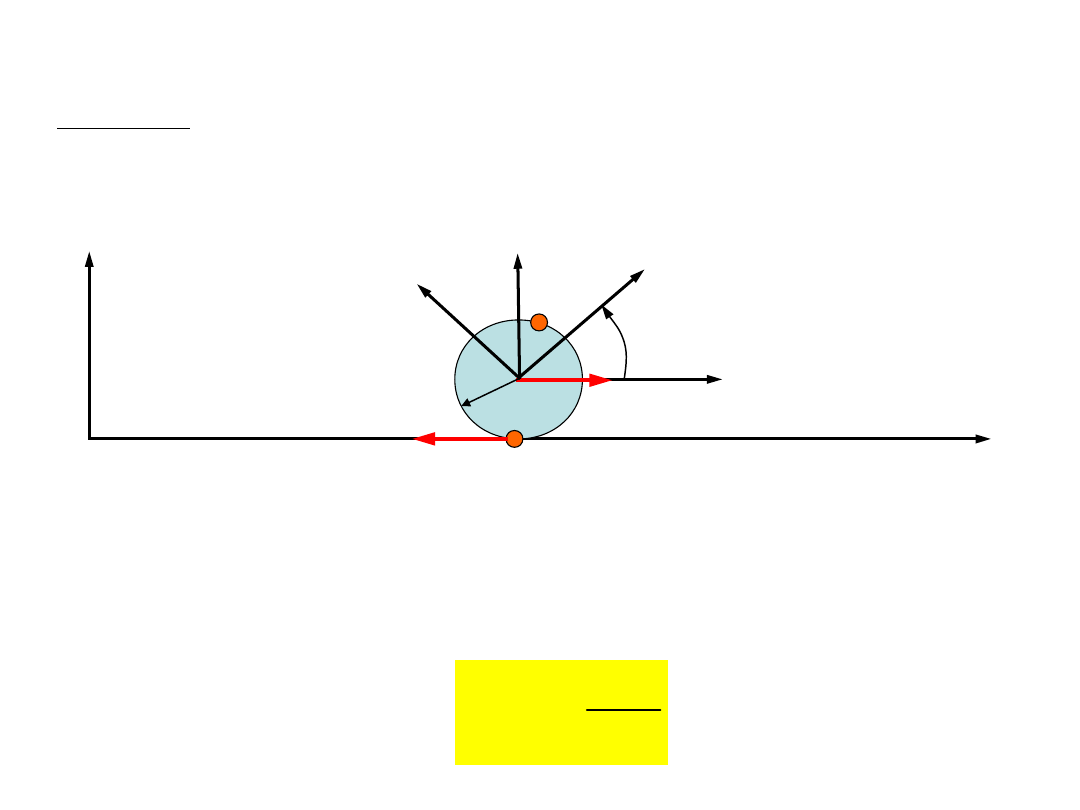
Zadanie:
Samochód porusza się ruchem prostoliniowym, jednostajnie
przyspieszonym. Opisać ruch punktu na obwodzie koła
samochodu.
x
y
x
1
y
1
0
( )
u t
h
x
A
B
1
0
( )
( )
u t
u t
=-
Jeżeli koło ma dobrą przyczepność do podłoża, punkt B koła
ma w chwili czasu t w układzie nieruchomym prędkość równą
0. Dlatego w układzie ruchomym jego prędkość będzie równa
– u
0
(t).
0
r
0
0
( )
( )
u t
t
r
w
=-
j
Prędkość
kątowa
koła będzie równa:
Punkt A ma w układzie współrzędnych związanym z kołem
ustalone współrzędne
.
Ruch płaski bryły
sztywnej
1
1
( , , )
cos ( )
sin ( )
( , , )
sin ( )
cos ( )
x
t
t
t
y
t
t
t
x h
x
j
h
j
x h
x
j
h
j
=
-
=
+
0
1
0
1
( , , )
( )
( , , )
( , , )
( )
( , , )
x
t
x t
x
t
y
t
y t
y
t
x h
x h
x h
x h
=
+
=
+
0
0
0
0
0
0
0
0
( )
( )
( )
1
( )
u t
d
t
dt
r
u t
du
a
d
d
t
dt
dt
r
r dt
r
j
w
w
e
=
=-
�
�
=
=
-
=-
=-
�
�
�
�
Ruch płaski bryły
sztywnej
0
0
0
0
0
0
0
0
0
( )
(0)
(0) 0
(0) 0
( )
t
t
a
a t
d
d
d
t
d
r
r
a t
u
t
r
w
t
t
w
w
t
w
w
�
�
= -
�
-
=-
�
�
�
�
= �
=
=-
�
�
2
0
0
0
0
0
0
2
0
0
( )
(0)
2
(0) 0
( )
2
t
t
a
a t
d
d
d
t
d
r
r
a t
t
r
t
j
t
t
j
j
t
j
j
�
�
= -
�
-
=-
�
�
�
�
=
=-
�
�

Ruch płaski bryły
sztywnej
0
0
0
0
0
0
0
0
0
0
( ),
( )
(0)
(0) 0
( )
t
t
dx
du
u t
a
dt
dt
du
d
ad
u t u
at
d
u
u t
at
t
t
t
=
=
=
�
-
=
=
=
�
�
2
0
1
0
0
2
0
0
2
1
0
0
2
( )
(0)
(0) 0
( )
t
t
dx
d
a d
x t
x
at
d
x
x t
at
t
t t
t
=
�
-
=
=
=
�
�

Ruch płaski bryły
sztywnej
2
2
2
0
0
1
2
0
0
2
2
0
0
0
0
0
( , , )
cos
sin
2
2
( , , )
sin
cos
2
2
a t
a t
x
t
at
r
r
a t
a t
y
t
r
r
r
x h
x
h
x h
x
h
�
�
�
�
=
+
-
-
-
�
�
�
�
�
�
�
�
�
�
�
�
= +
-
+
-
�
�
�
�
�
�
�
�

Mechanizmy
płaskie
Mechanizmem
nazywamy
zespół
elementów
konstrukcyjnych połączonych ze sobą w taki
sposób, aby ruch jednego elementu wywoływał
określony ruch pozostałych elementów. Elementy
wchodzące w skład mechanizmu nazywamy
członami
lub
ogniwami mechanizmu
.
W każdym mechanizmie można wyodrębnić:
człon czynny
(napędzający),
człony bierne
(napędzane),
ostoję
(podstawę, człon nieruchomy)
Mechanizmem płaskim
nazywamy mechanizm,
którego wszystkie człony wykonują ruch płaski.
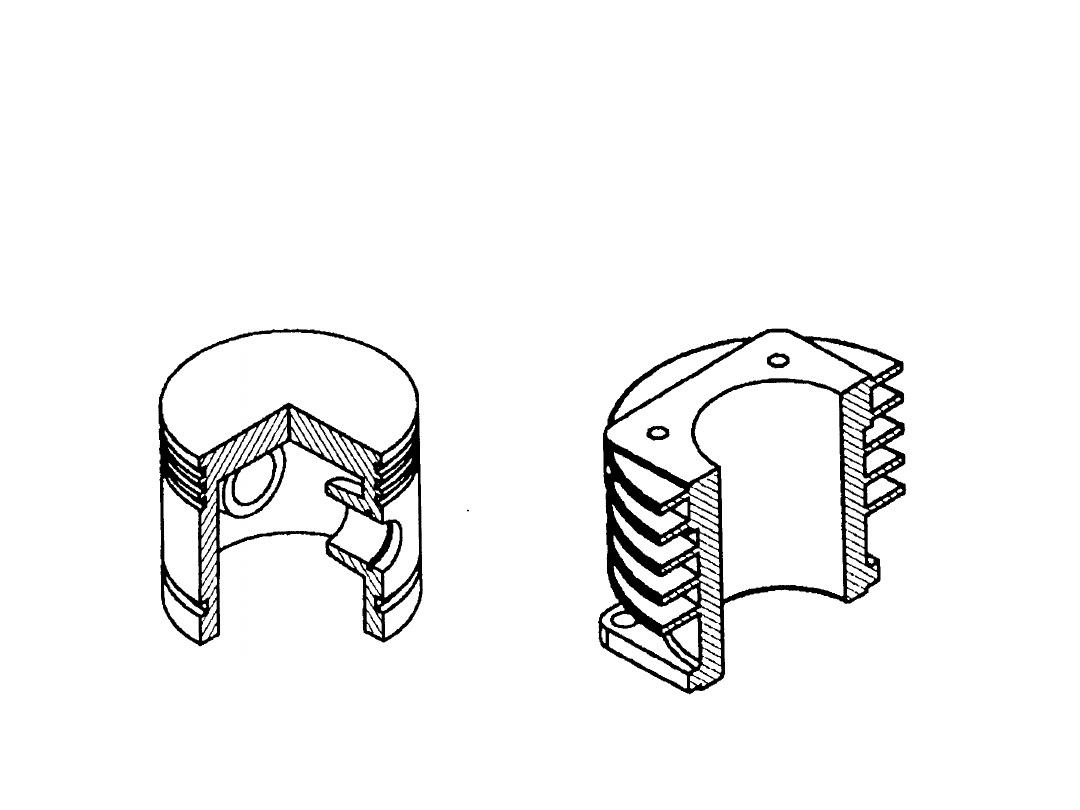
Mechanizmy
płaskie
Dwa człony połączone węzłem tworzą
parę
kinematyczną
.
Człony mechanizmów łączą się w
węzłach
. Dwa
człony tworzą węzeł, jeżeli mają co najmniej jeden
punkt wspólny i mogą się względem siebie
poruszać.
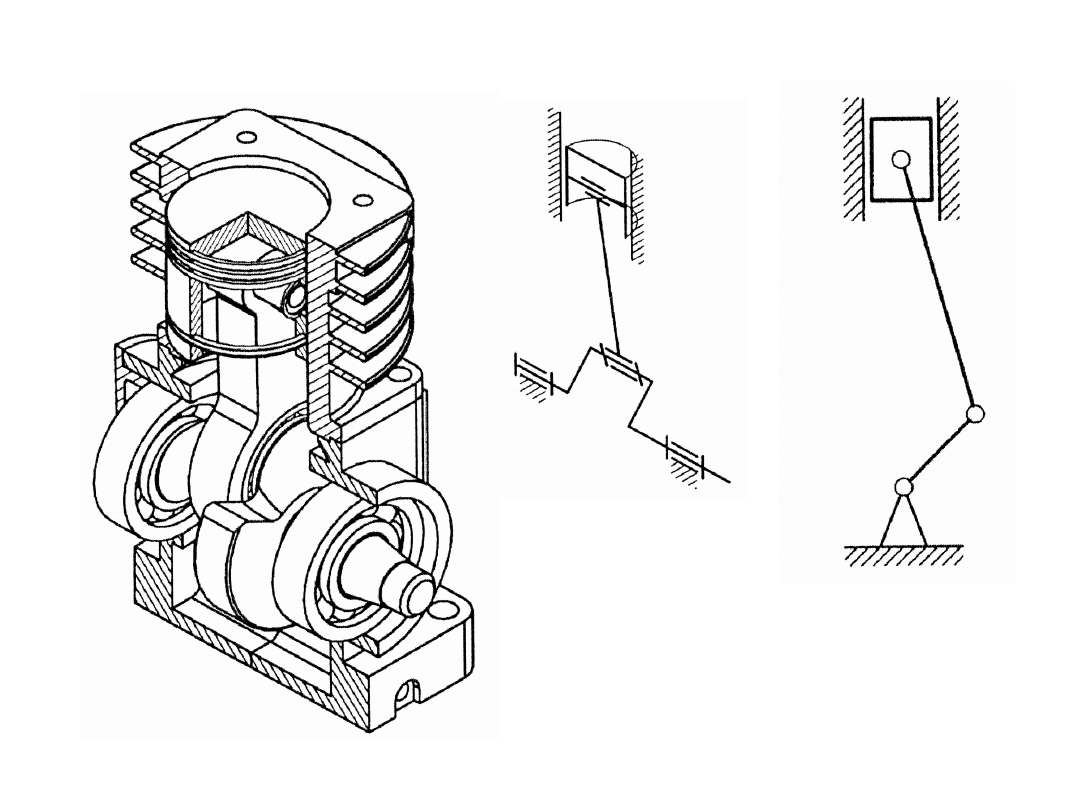
Para: tłok (człon czynny) – cylinder (człon
nieruchomy)
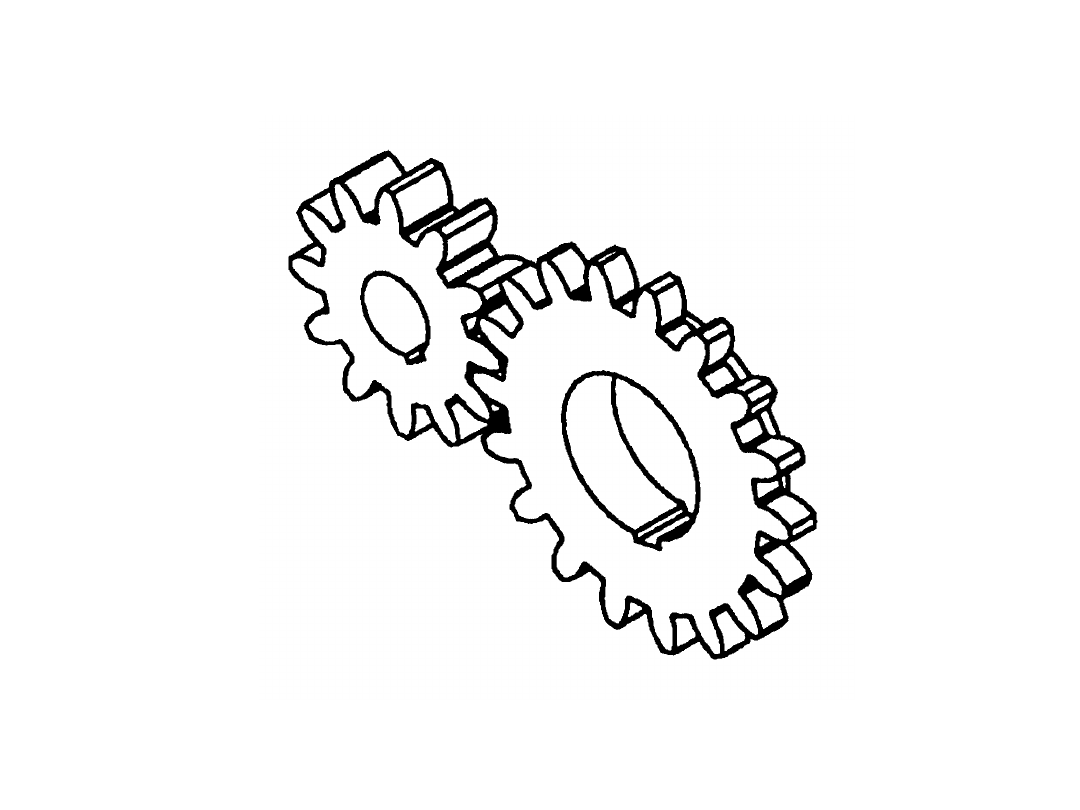
Mechanizmy
płaskie
Para: koło zębate (człon czynny) – koło zębate (człon
bierny)
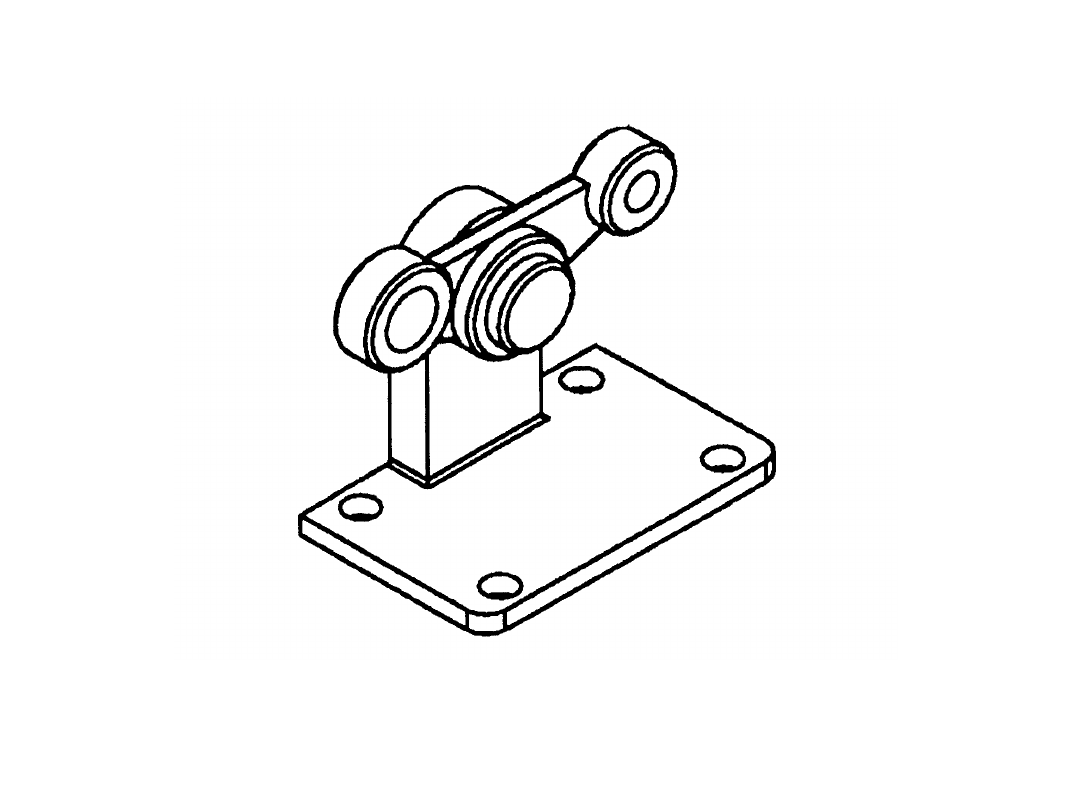
Mechanizmy
płaskie
Para: podstawa (człon nieruchomy) – dźwignia (człon
bierny)
Mechanizmy
płaskie
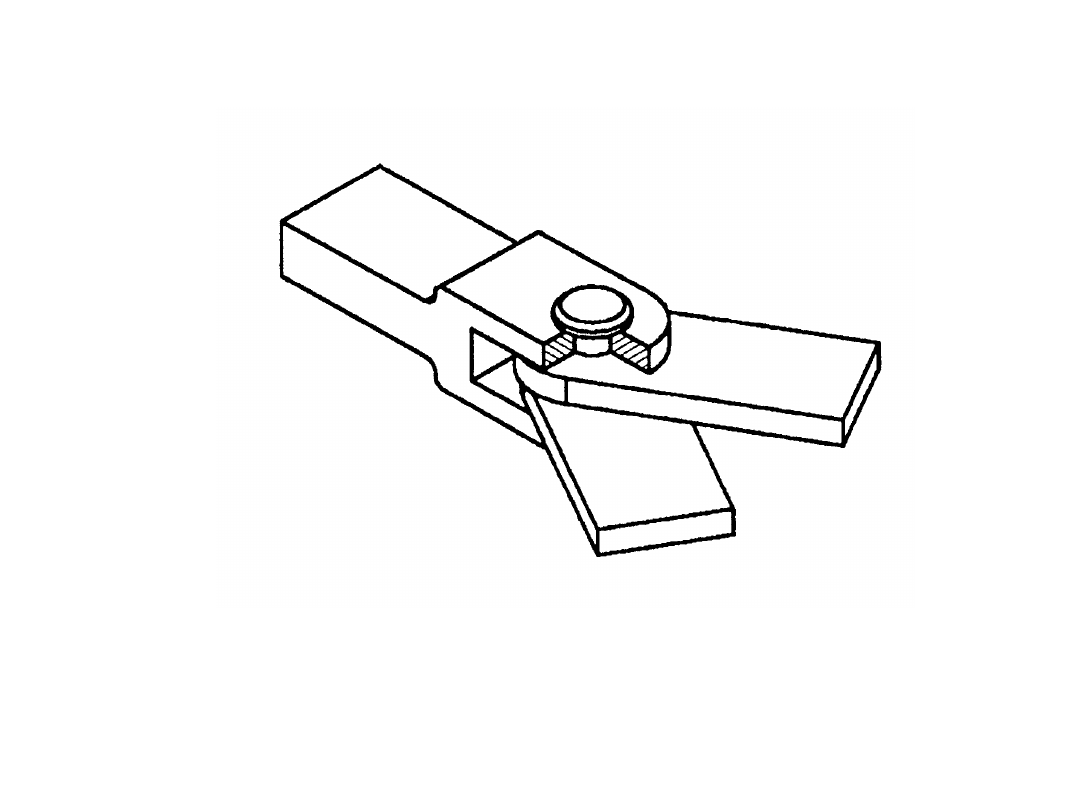
Para wielokrotna (połączenie sworzniowe): podstawa
(człon nieruchomy) – pręty (człony bierne)
Mechanizmy
płaskie
Schemat kinematyczny
(przestrzenny i płaski)
Mechanizmy
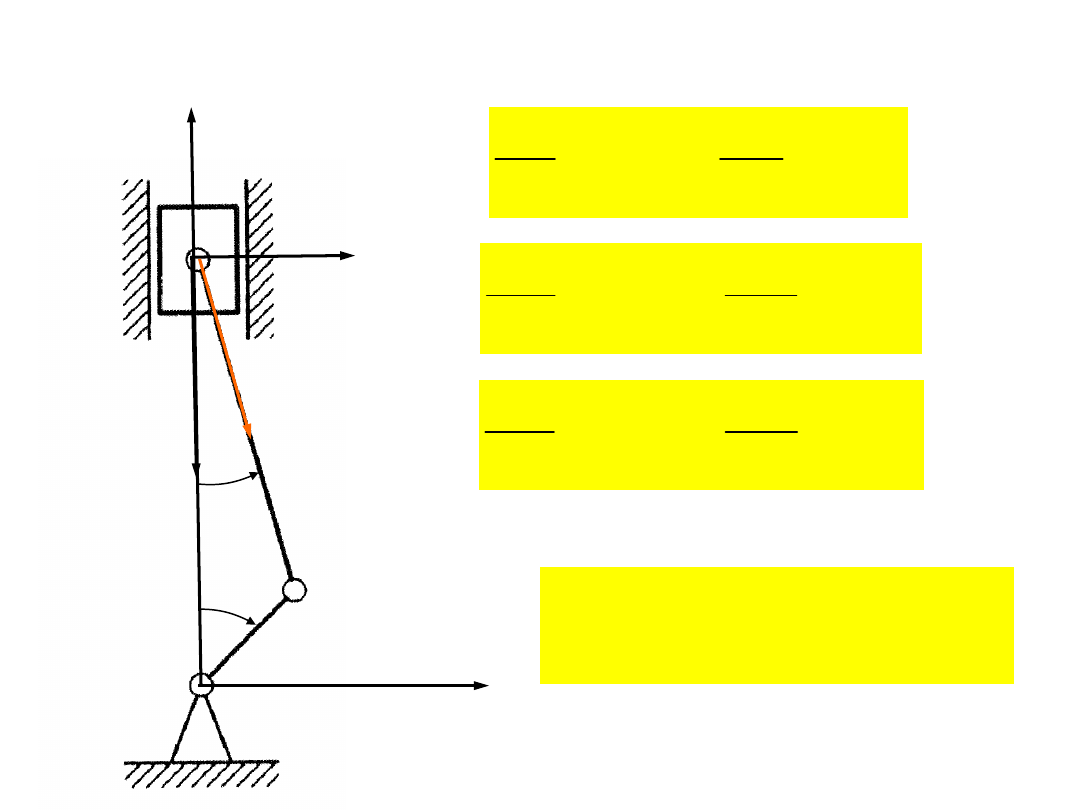
płaskie
x
y
y
1
x
1
B
A
C
A
j
C
j
( ),
( )
A
A
A
A
dx
du
u t
a t
dt
dt
=
=
( ),
( )
A
A
A
A
d
d
t
t
dt
dt
j
w
w
e
=
=
( ),
( )
C
C
C
C
d
d
t
t
dt
dt
j
w
w
e
=
=
Niewiadome funkcje:
( ), ( ), ( ),
( ), ( ),
( ),
( ), ( )
A
A
A
A
A
C
C
C
x t u t
t
t
t
t
t
t
j
w
e
j
w
e
x
Mechanizmy
płaskie
x
y
y
1
x
1
B
A
C
A
j
C
j
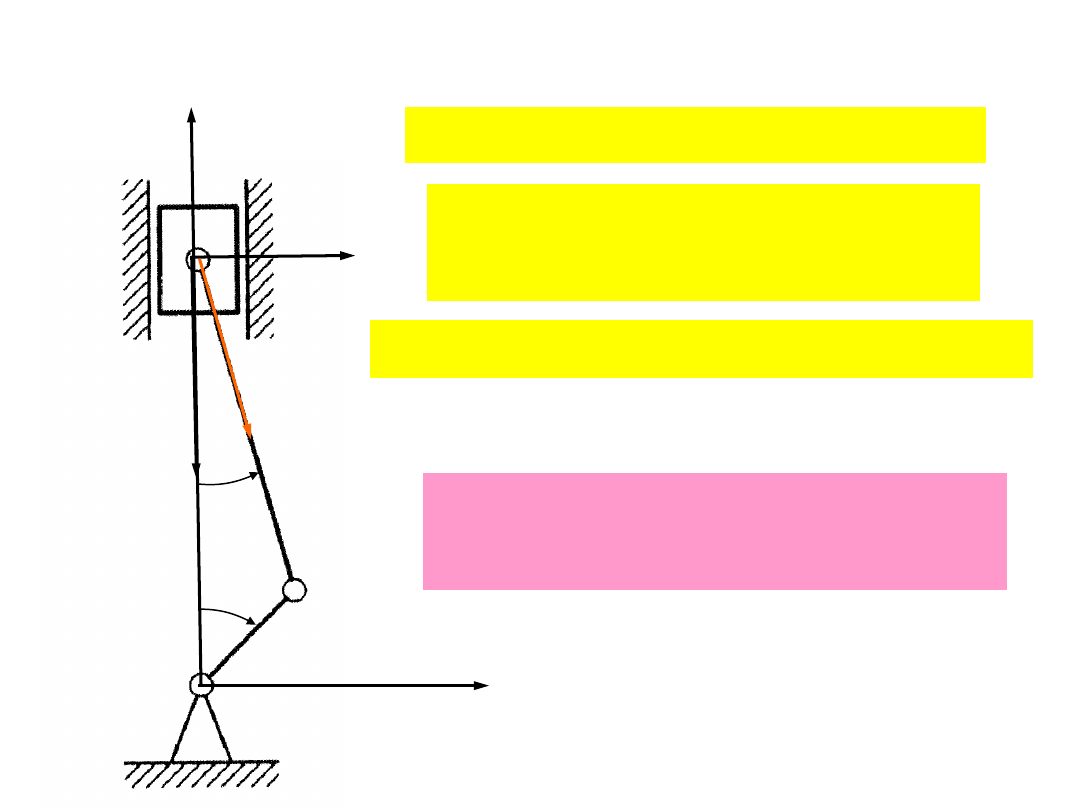
1
1
( )
( )
( ),
( )
( )
B
A
B
B
B
x t
x t
x t
y t
y t
=
-
=
x
1
1
( )
cos ( )
cos ( ),
( )
sin ( )
B
B
A
AB
A
B
AB
A
x t
t
l
t
y t
l
t
x
j
j
j
=
=
=
( )
cos ( ),
( )
sin ( )
B
BC
C
B
BC
C
x t
l
t
y t
l
t
j
j
=
=
( )
cos ( )
cos ( ),
sin ( )
sin ( )
A
AB
A
BC
C
AB
A
BC
C
x t l
t
l
t
l
t
l
t
j
j
j
j
-
=
=
Związki kinematycznej
zgodności:
Mechanizmy
płaskie
[
]
[
]
( )
cos ( )
cos ( )
A
AB
A
BC
C
d
d
x t l
t
l
t
dt
dt
j
j
-
=
sin ( )
sin ( )
C
A
A
AB
A
BC
C
d
dx
d
l
t
l
t
dt
dt
dt
j
j
j
j
+
=-
( )
( )sin ( )
( )sin ( )
A
AB A
A
BC C
C
u t l
t
t
l
t
t
w
j
w
j
+
=-
[
]
[
]
sin ( )
sin ( )
AB
A
BC
C
d
d
l
t
l
t
dt
dt
j
j
=
( )cos ( )
( )cos ( )
AB A
A
BC C
C
l
t
t
l
t
t
w
j
w
j
=

Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
Wyszukiwarka
Podobne podstrony:
Mechanika Techniczna I Skrypt 3 12
Mechanika techniczna(1)
Mechanika Techniczna I Skrypt 2 4 Kinematyka
Mechanika Techniczna I Skrypt 4 2 4 Układ belkowy złożony
Ostwald M Podstawy mechaniki Mechanika techniczna
Tarcie, Materiały, Inżynieria Środowiska, Semestr 2, Mechanika techniczna, egzaminy
Maszyny-koło projekt, Technologia chemiczna, Maszynoznawstwo i mechanika techniczna, ogólne materiał
TARCIE, PW Transport, Gadżety i pomoce PW CD2, MECHANIKA, MECHANIKA !!, mechanika techniczna - labor
Mechanika Techniczna I Opracowanie 06
Mechanika Techniczna I Skrypt 1 2 1 Okreslenie i rodz
Mechanika Techniczna I Statyka Płaski Układ Sił
mechanika techniczna, kolo mohra
opracowanie 4 mechana, Studia - Mechatronika, III semestr, Mechanika Techniczna
Mechanika techniczna podstawy
Mechanika techniczna (150dpi)
Mechanika Techniczna I Skrypt 5 03
MECHANIKA TECHNICZNA, Studia, Transport
więcej podobnych podstron