Teoria Układów Napędowych
Plan Wystąpienia
Określenie funkcji protezy aktywnej
Podział protez
Rodzaje mechanizmów chwytnych
oraz sposoby ich realizacji
Układy przeniesienia napędu
Algorytmy sterowania bioprotezami
Istniejące rozwiązania
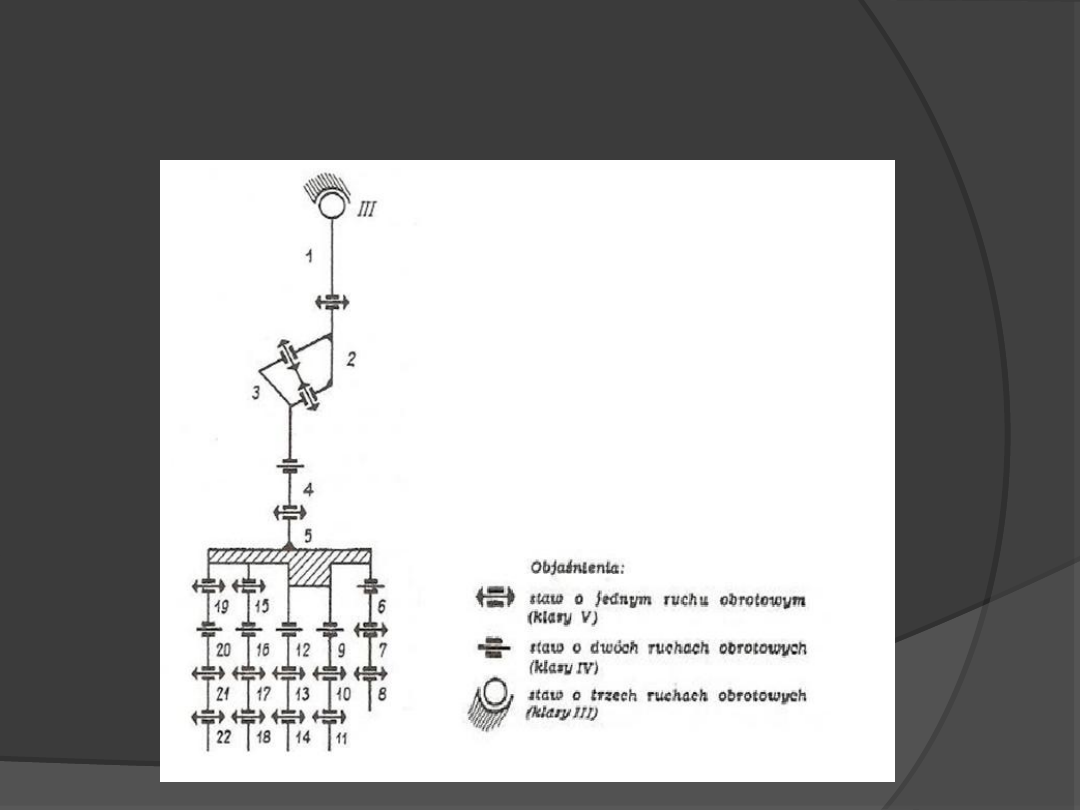
Budowa i funkcje ręki
ludzkiej

Podział Bioprotez - kryteria
Wysokość Amputacji
Źródło siły sterującej
końcówką chwytną
Protezy palców
Dłoni
Przedramienia
Ze stawem łokciowym
Po wyłuszczeniu w
stawie barkowym
Bierne
Czynne: (siła
mięśniowa,
sterowanie
bioelektryczne)
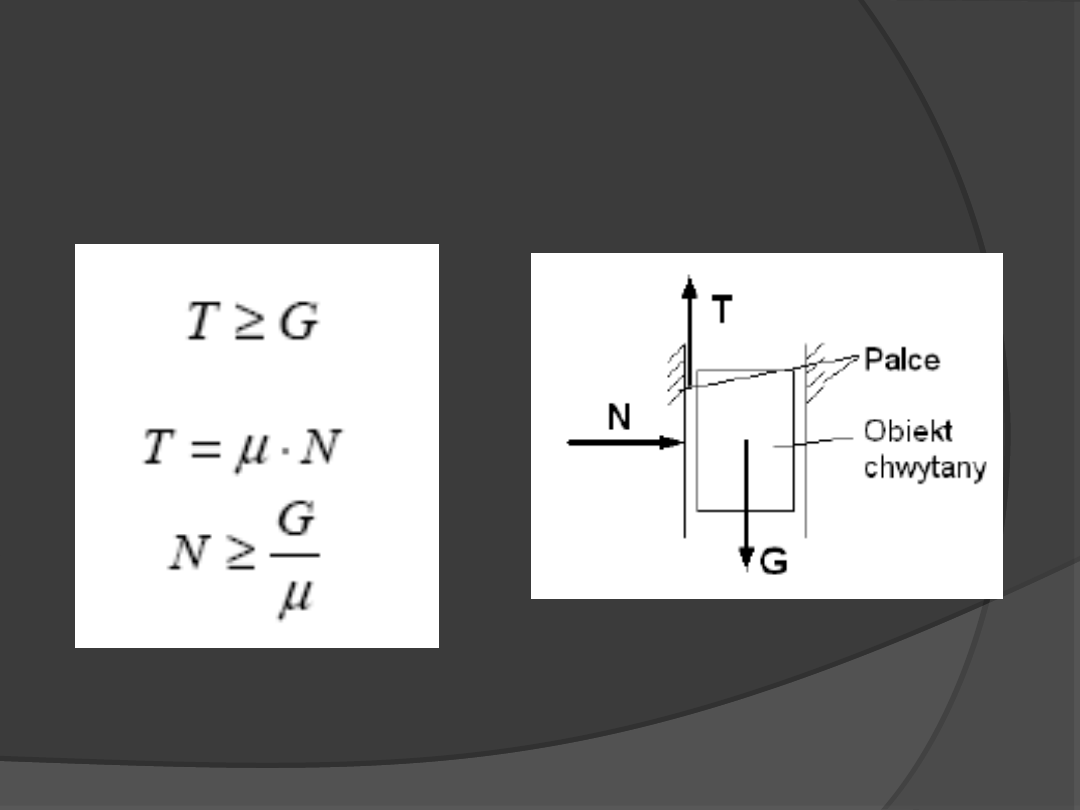
Warunek utrzymania
chwytu
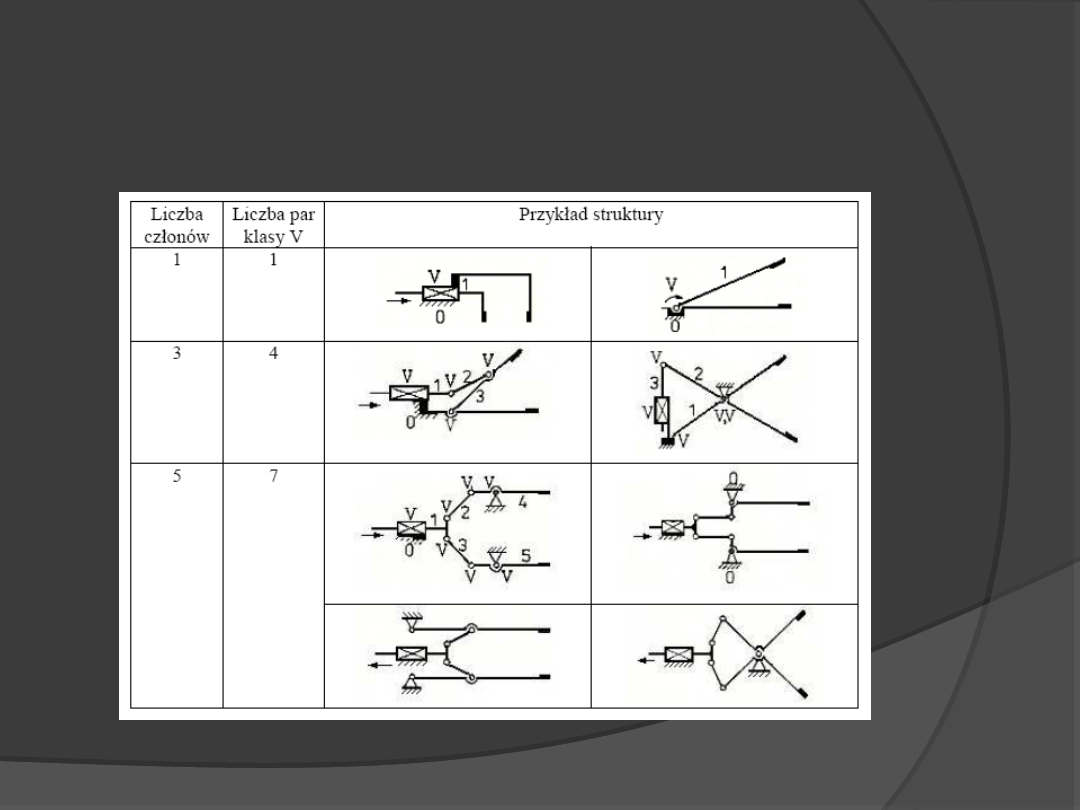
Struktury Mechaniczne
Chwytaków
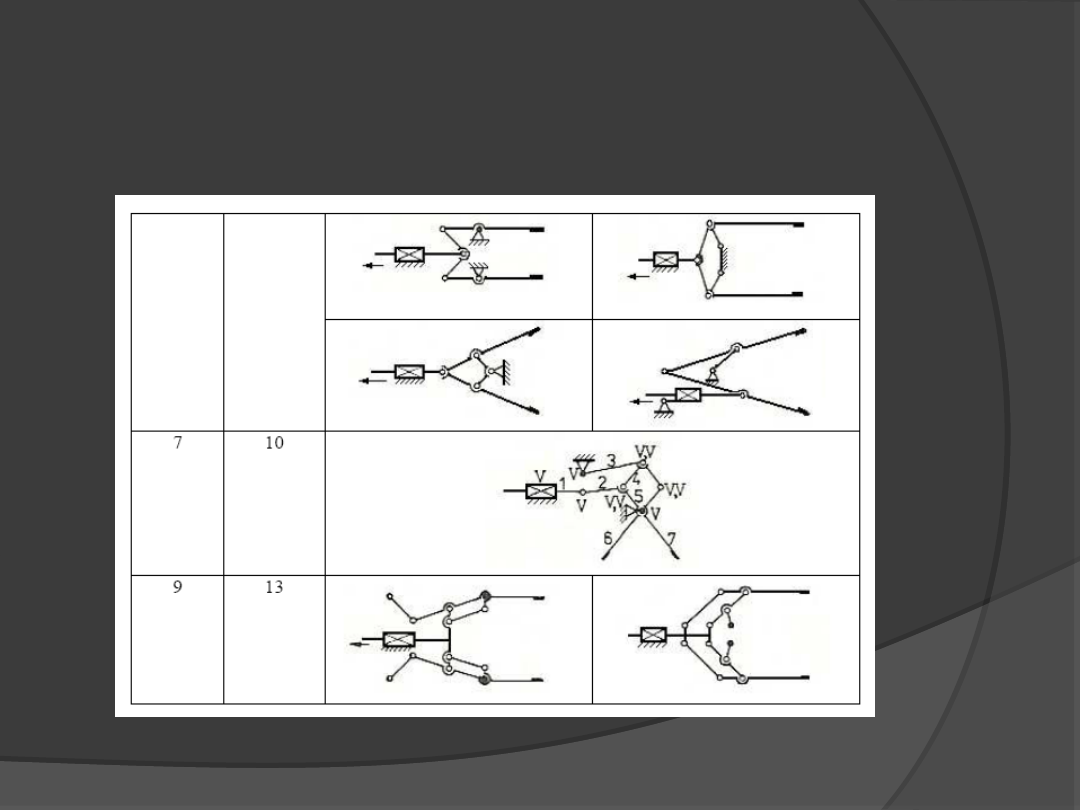
Struktury Mechaniczne
Chwytaków - c.d.
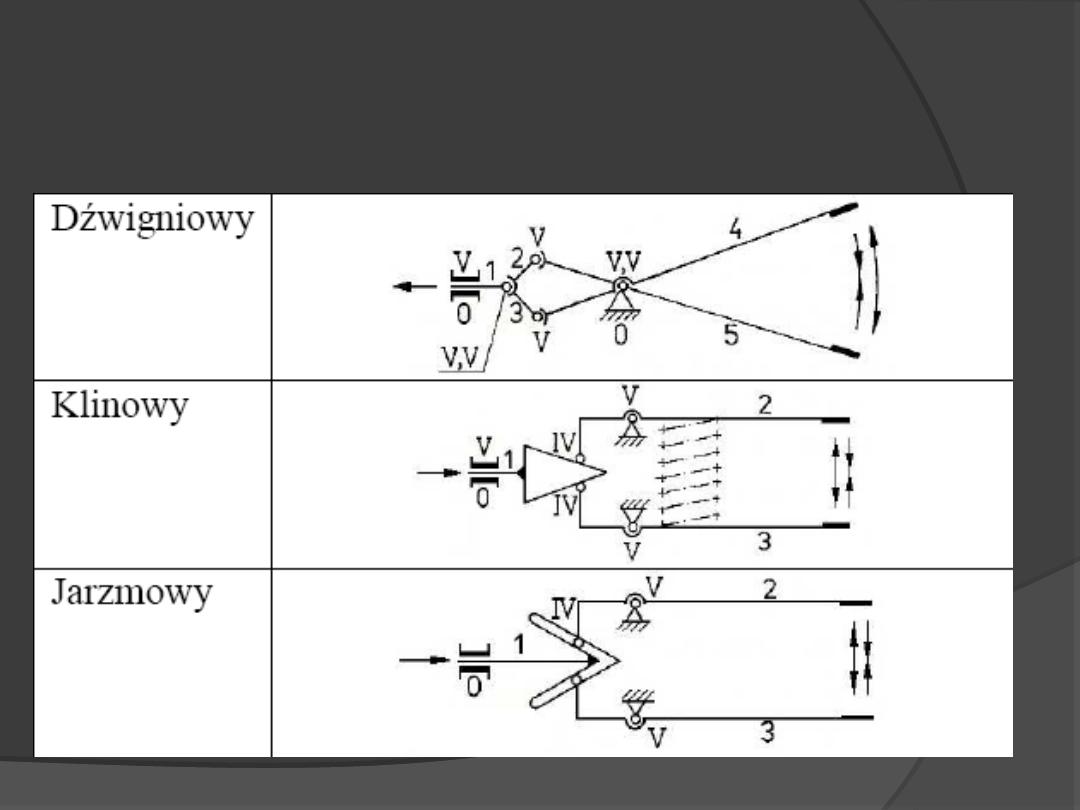
Sposoby realizacji napędu
chwytaków
Sposoby realizacji napędu
chwytaków – c.d.
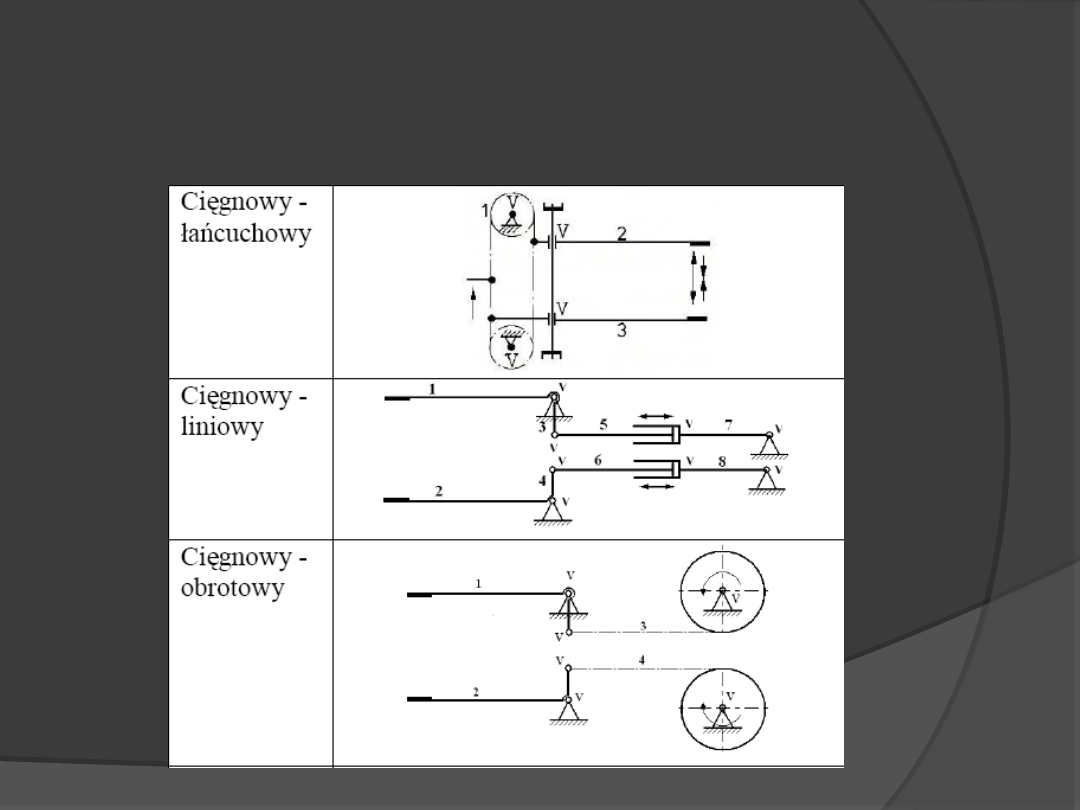
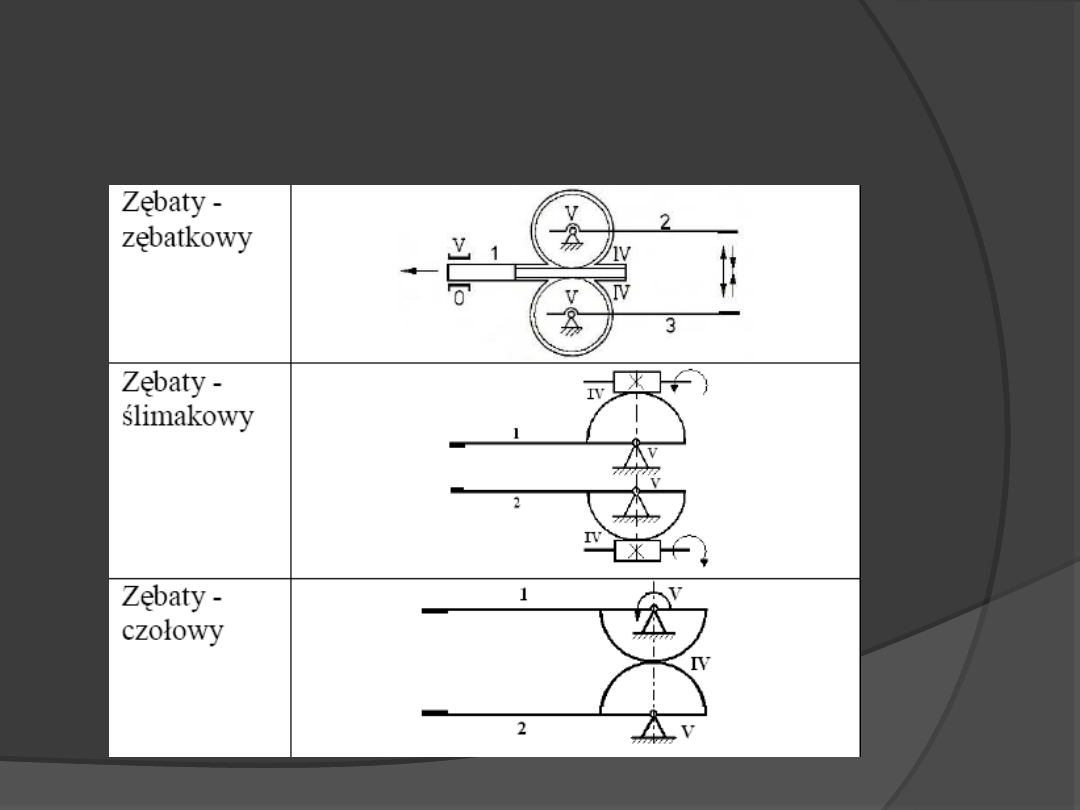
Sposoby realizacji napędu
chwytaków – c.d.
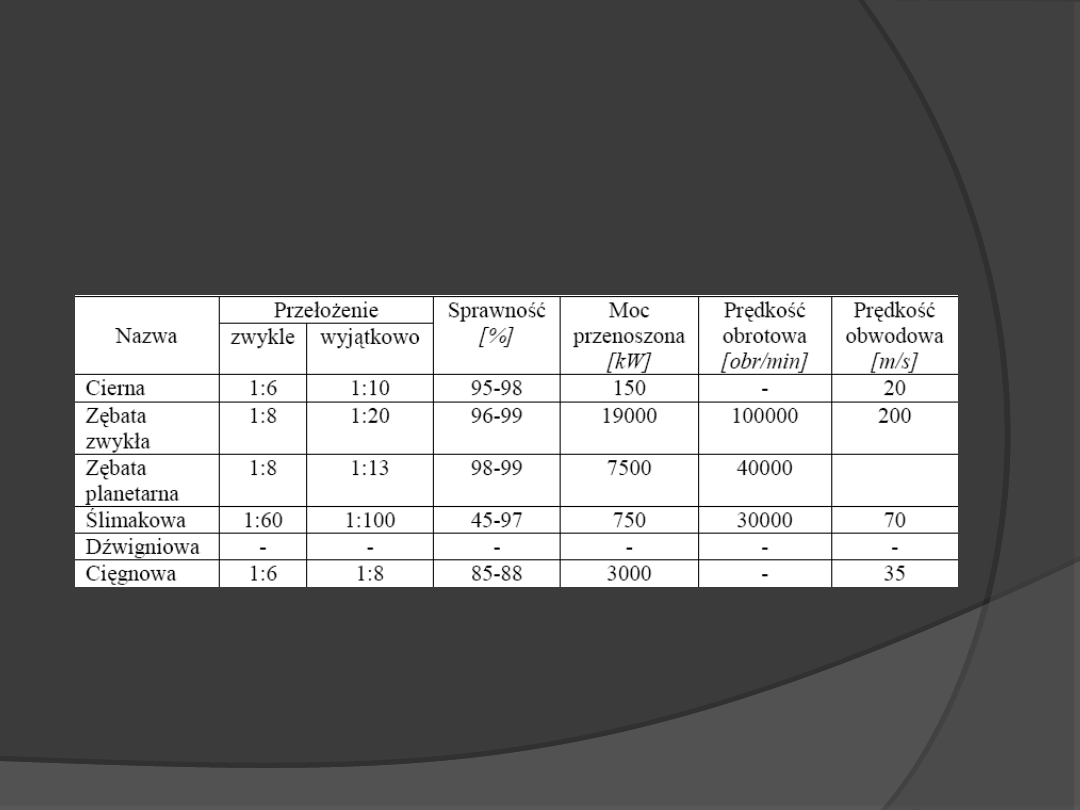
Rodzaje przekładni
używanych w bioprotezach
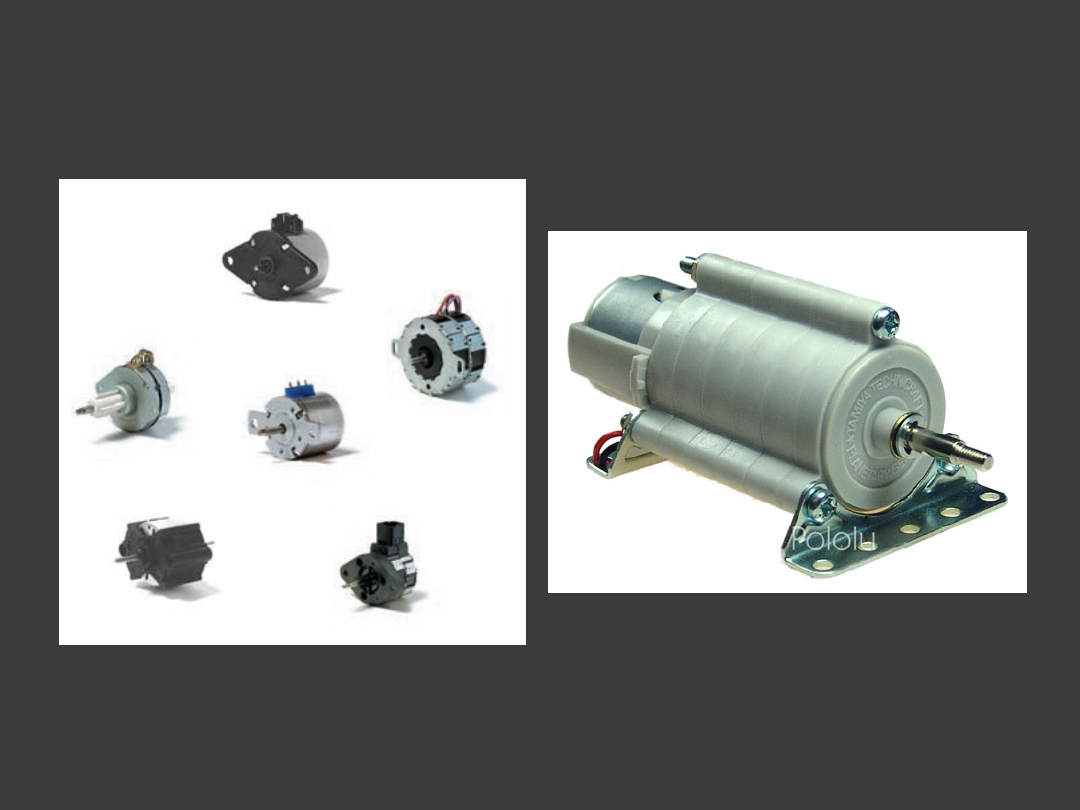
Źródła Energii
Mechanicznej
Silniki krokowe
Silniki prądu stałego
szczotkowe
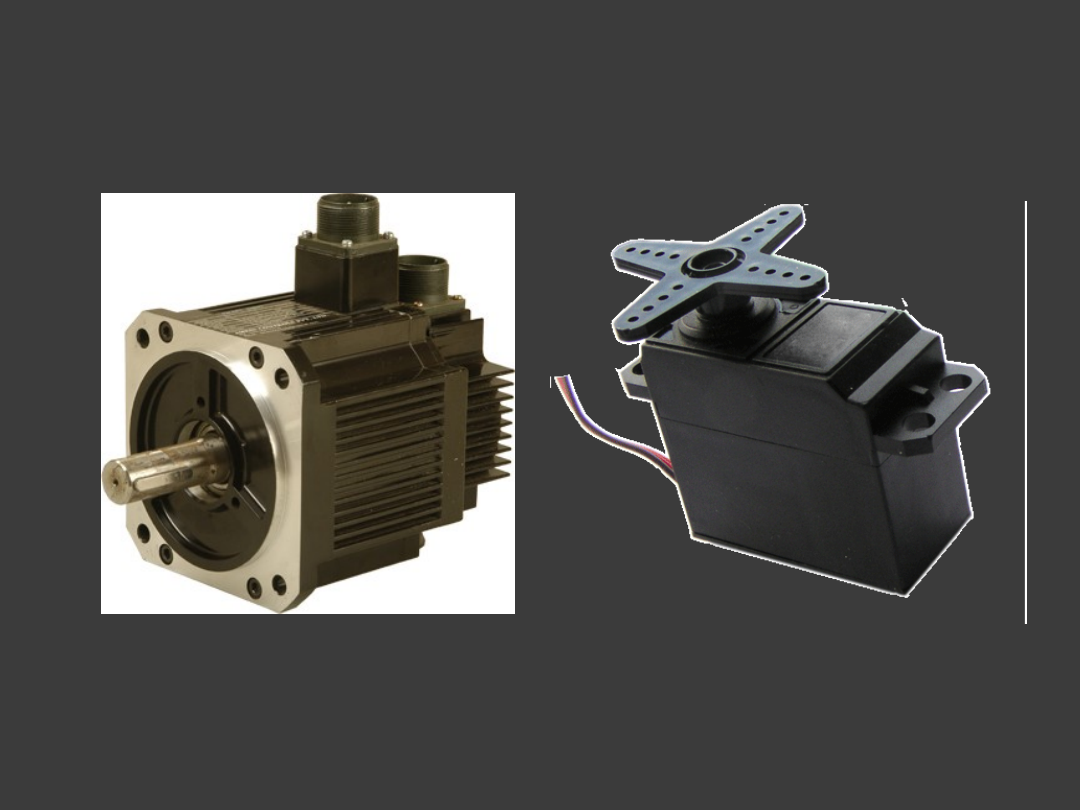
Źródła Energii
Mechanicznej
Silnik prądu stałego
bezszczotkowy
Servo-napęd
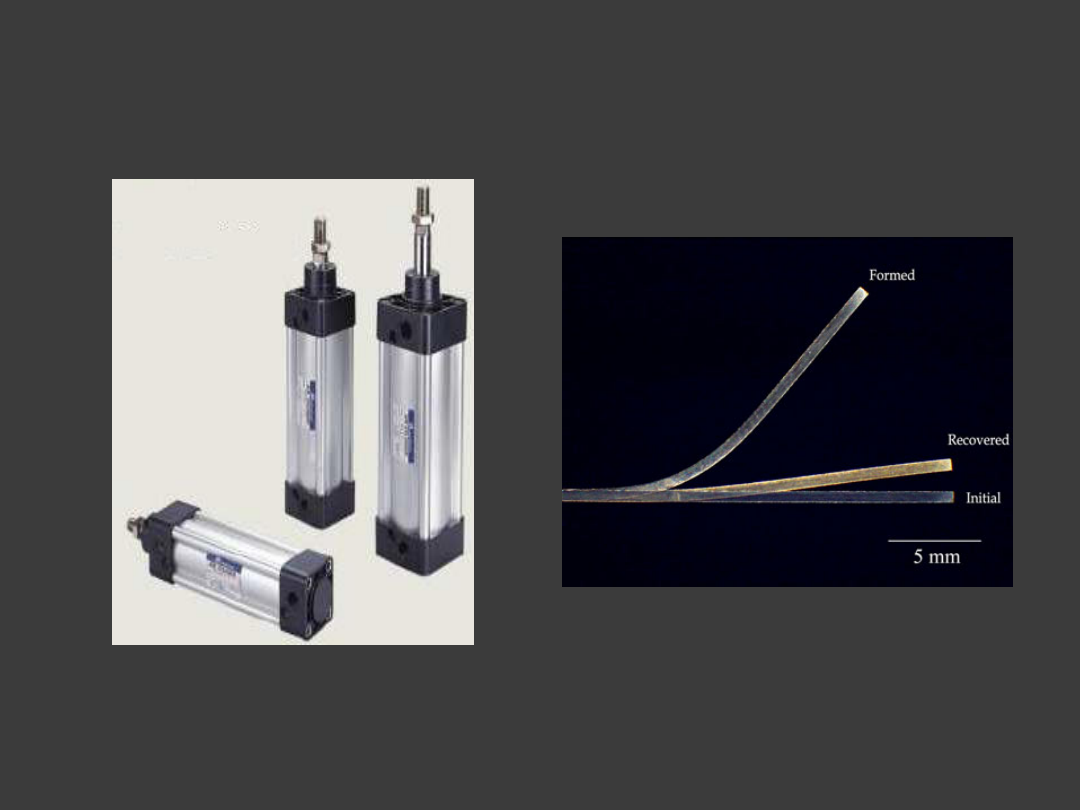
Źródła Energii
Mechanicznej
Siłowniki
Pneumatyczne
Metale z pamięcią
kształtu
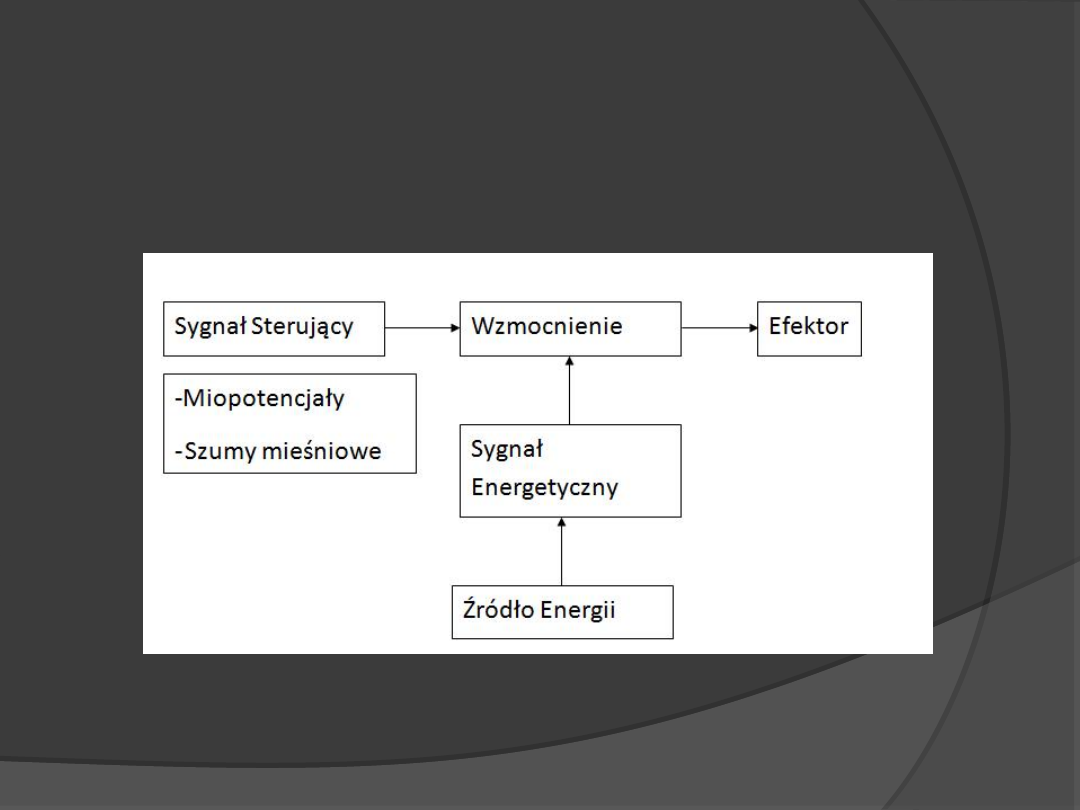
Sterowanie Bioprotezami

SensorHand
Układ napędowy:
Silnik prądu
stałego,
przekładnia
zębata kątowa,
przekładnia
zębata czołowa
Sterowanie:
Elektromiograficz
ne
I - Limb
Układ napędowy:
silnik prądu
stałego,
przekładnia
zębata z
elastyczną listwą
zębatą
Sterowanie:
Elektromiograficz
ne
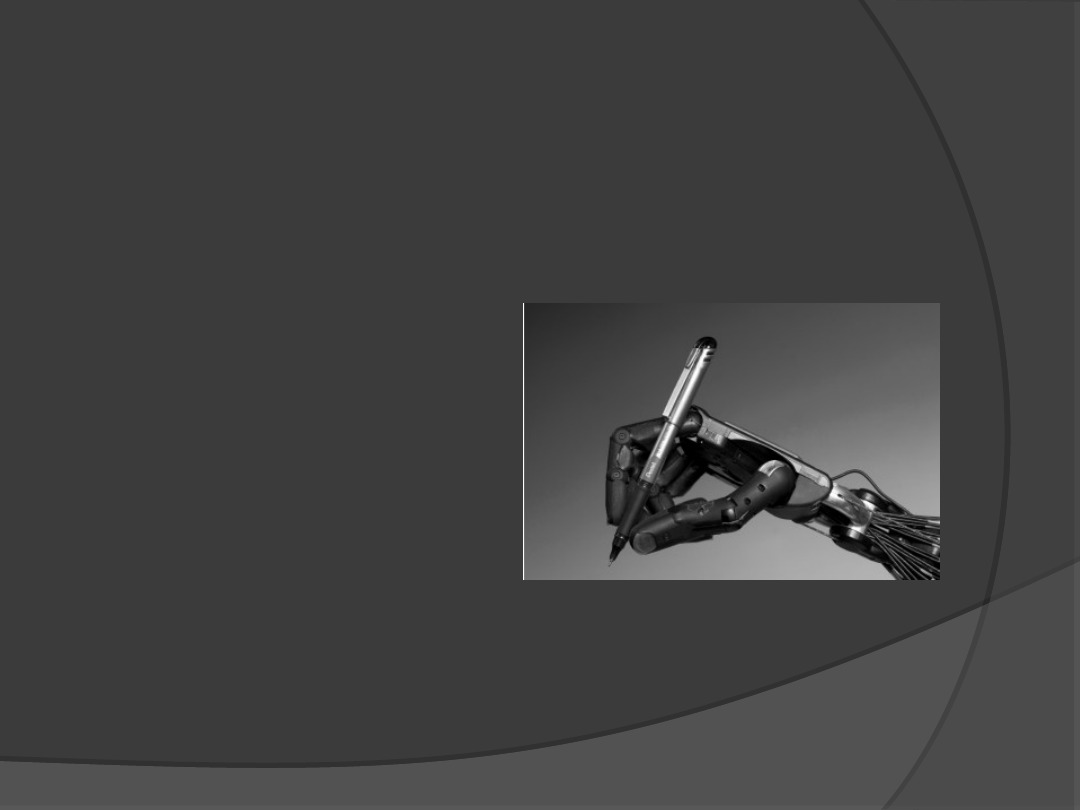
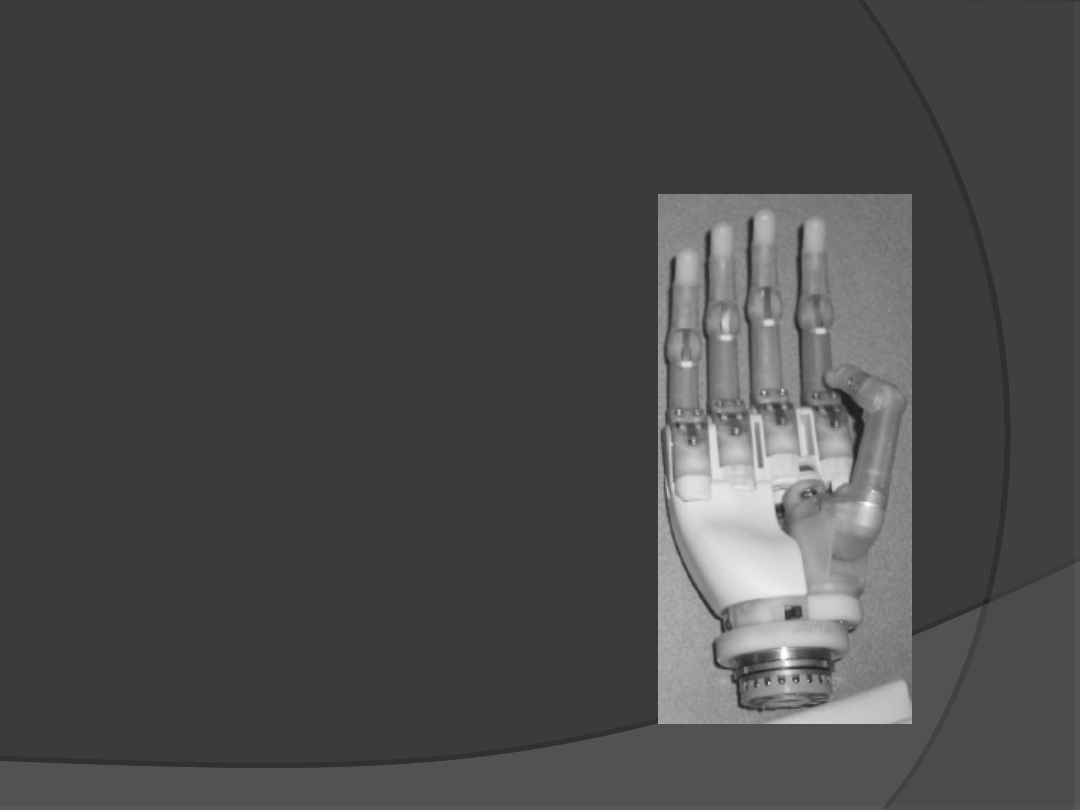
Shadow Hand
Układ napędowy:
siłowniki
pneumatyczne,
cięgna
Sterowanie:
elektryczne
(biomanipulator
studyjny)
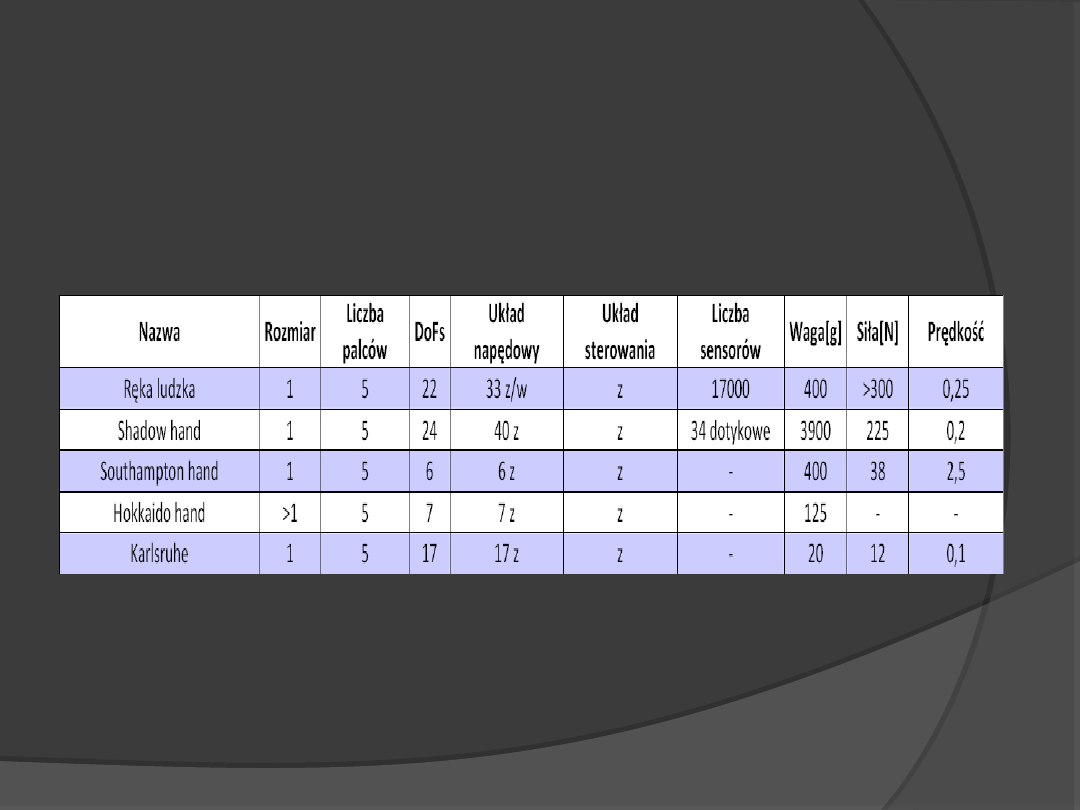
Porównanie osiągów

Podsumowanie
Wymagania względem
napędu i układu napędowego
Zakres parametrów
Mała waga
Małe wymiary
Wysoka prędkość
ruchu
Duża siła na wyjściu
Energooszczędność
Wysoka sprawność
Samohamowność
Moment obrotowy:
<3Nm
Prędkości obrotowe:
<21000obr/min
Bibliografia
Michał Turów, „Projekt i wykonanie
biomanipulatora typu ręka
człowieka”, praca dyplomowa
magisterska
„Biocybernetyka i Inżynieria
Biomedyczna 2000: Tom5:
Biomechanika i inżynieria
rehabilitacyjna Tom 5” pod red.
Macieja Nałęcza
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
Wyszukiwarka
Podobne podstrony:
Układy Napędowe oraz algorytmy sterowania w bioprotezach
dudziński,układy napędowe,Pojęcia dot nap elektr oraz rodzaje i elementy składowe
dudziński,układy napędowe,Układy sterownia silnika
9 podstawowe algorytmy sterowania nowy
nieodporny sprawozdanie, Pwr, Metody i algorytmy sterowania cyfrowego, sprawka
Implementacja i badania algorytmów sterowania robotem dwukołowym
4 Główne układy napędowe
dudziński,układy napędowe,Hamowanie elektryczne silników indukcyjnych
dudziński,układy napędowe,Sprowadzenie momentów mechanicznych
uklady napedowe 3
dudziński,układy napędowe,Rozruch silników indukcyjnych pierścieniowych
Zawory hydrauliczne, PWR, hydrostatyczne układy napędowe, pomoce naukowe
dudziński,układy napędowe, opracowanie pytań kolokwium
dudziński,układy napędowe,Metody kształtowania przebiegu charakterystyk mechanicznych silnika indukc
Uklady napedowe 2 lab, LABKA
więcej podobnych podstron