Pamięć wewnętrzna
Wyższa Szkoła Biznesu
Architektura i organizacja
komputerów
Wykład 5
Wprowadzenie
Pamięć komputera, pozornie prostą koncepcyjnie,
cechuje najszerszy zakres rodzajów, technologii,
organizacji, wydajności i kosztów w stosunku do
pozostałych składników.
Nie istnieje jedna technologia, która optymalnie
spełniałaby wymagania systemu komputerowego
dotyczące pamięci. W rezultacie typowy system
komputerowy zawiera hierarchię podsystemów
pamięci: niektóre z nich są wewnętrzne w stosunku
do systemu (bezpośrednio dostępne dla procesora),
a inne zewnętrzne (dostępne dla procesora poprzez
moduł wejścia-wyjścia).
Położenie
Rozpoczynamy
od
najłatwiej
dostrzegalnego
aspektu pamięci: jej położenia. Jak sugerują tytuł
wykładu, istnieją pamięci zarówno wewnętrzne, jak
i zewnętrzne w stosunku do komputera.
Pamięć wewnętrzna jest często identyfikowana z
pamięcią główną. Są jednak inne formy pamięci
wewnętrznej np.. procesor wymaga własnej
pamięci lokalnej w postaci rejestrów, stanowiąca
część procesora jednostka sterująca może również
potrzebować własnej pamięci wewnętrznej.
Podstawowe własności
komputerowych systemów
pamięciowych
Położenie
Pojemność
Procesor
Rozmiar słowa
Wewnętrzna (główna)
Liczba słów
Zewnętrzna (pomocnicza)
Jednostka transferu
Sposób dostępu
Słowo
Sekwencyjny
Blok
Bezpośredni
Rodzaj fizyczny
Swobodny
Półprzewodnikowa
Skojarzeniowy
Magnetyczna
Wydajność
Właściwości fizyczne
Czas dostępu
Ulotna/nieulotna
Czas cyklu
Wymazywalne/niewymazywalna
Szybkość transferu
Organizacja
Pojemność
Oczywistą własnością pamięci jest jej
pojemność.
W przypadku pamięci wewnętrznej jest ona
zwykle wyrażana w bajtach (1 bajt = 8
bitów) lub w słowach. Powszechnymi
długościami słów są: 8, 16 i 32 bity.
Pojemność pamięci zewnętrznej jest zwykle
wyrażana w bajtach.
Jednostka transferu
Parametrem związanym z pojemnością
jest
jednostka
transferu
(ang.
transfer unit).
W przypadku pamięci wewnętrznej
jednostka transferu jest równa liczbie
linii danych doprowadzonych do modułu
pamięci i wychodzących z niego.
Jest ona często równa długości słowa,
ale nie musi tak być.
Słowo, Jednostka
adresowalna
Słowo. „Naturalna” jednostka organizacji pamięci.
Zwykle rozmiar słowa jest równy liczbie bitów
wykorzystywanych do reprezentowania liczby lub długości
rozkazu. Niestety, jest wiele wyjątków. Na przykład CRAY-
1 wykorzystuje słowa 64-bitowe, jednak liczba całkowita
jest reprezentowana za pomocą 24 bitów. VAX ma
zdumiewająco różne długości rozkazów, wyrażone jako
wielokrotności bajtów, a rozmiar słowa wynosi 32 bity.
Jednostka adresowalna. W wielu systemach jednostką
adresowalną jest słowo. Jednak niektóre systemy
umożliwiają adresowanie na poziomie bajtów. W każdym
przypadku zależność między długością adresu A a liczbą
adresowalnych jednostek N jest następująca: 2
A
=N.
Jednostka transferu
Jednostka
transferu.
W
przypadku
pamięci głównej jest to liczba bitów
jednocześnie odczytywanych z pamięci lub
do niej zapisywanych.
Jednostka transferu nie musi być równa
słowu lub jednostce adresowalnej.
W przypadku pamięci zewnętrznej dane są
często przekazywane w jednostkach o wiele
większych niż słowo, określanych jako bloki.
Sposób dostępu
Jedna z najbardziej widocznych różnic między
różnymi rodzajami pamięci dotyczy sposobu
dostępu do jednostek danych. Można
wyróżnić cztery rodzaje dostępu:
dostęp sekwencyjny;
dostęp bezpośredni;
dostęp swobodny;
dostęp skojarzeniowy.
Dostęp sekwencyjny
Pamięć jest zorganizowana za pomocą jednostek danych
zwanych rekordami.
Dostęp jest możliwy w określonej sekwencji liniowej. Do
oddzielania rekordów i do pomocy przy odczycie są
wykorzystywane przechowywane informacje adresowe.
Odczyt i zapis są wykonywane za pomocą tego samego
mechanizmu, przy czym proces ten musi się przenosić z
pozycji bieżącej do pozycji pożądanej, przepuszczając i
odrzucając każdy rekord pośredni. W rezultacie czas
dostępu do różnych rekordów może się bardzo różnić.
Pamięci taśmowe (o których będzie mowa przy
omawianiu pamięci zewnętrznych), charakteryzują się
właśnie dostępem sekwencyjnym.
Dostęp bezpośredni
Podobnie jak w przypadku dostępu sekwencyjnego, proces
odczytu i zapisu w pamięciach o dostępie bezpośrednim
jest realizowany za pomocą tego samego mechanizmu.
Jednak poszczególne bloki lub rekordy mają unikatowy
adres oparty na lokacji fizycznej.
Dostęp jest realizowany przez bezpośredni dostęp do
najbliższego otoczenia, po którym następuje sekwencyjne
poszukiwanie, liczenie lub oczekiwanie w celu osiągnięcia
lokacji finalnej.
Jak poprzednio czas dostępu jest zmienny. Pamięci
dyskowe (które omówimy na wykładzie „pamięci
zewnętrzne”), charakteryzują się dostępem bezpośrednim.
Dostęp swobodny
Każda adresowalna lokacja w pamięci ma
unikatowy, fizycznie wbudowany mechanizm
adresowania.
Czas dostępu do danej lokacji nie zależy od
sekwencji poprzednich operacji dostępu i jest stały.
Dzięki temu dowolna lokacja może być wybierana
swobodnie
i
jest
adresowana
i
dostępna
bezpośrednio.
Systemy pamięci głównej wyróżniają się
dostępem swobodnym.
Dostęp skojarzeniowy
Jest to rodzaj dostępu swobodnego, który umożliwia
porównywanie
i
specyficzne
badanie
zgodności
wybranych bitów wewnątrz słowa, przy czym jest to
czynione dla wszystkich słów jednocześnie.
Tak więc słowo jest wyprowadzane raczej na podstawie
części swojej zawartości niż na podstawie adresu.
Podobnie jak w przypadku zwykłych pamięci o dostępie
swobodnym, każda lokacja ma własny mechanizm
adresowania, a czas dostępu jest stały i niezależny od
poprzednich operacji dostępu.
W pamięciach podręcznych, które omówimy w dalszej
części wykładu, może być używany dostęp skojarzeniowy.
Wydajność
Z punktu widzenia użytkownika dwiema
najważniejszymi własnościami pamięci są
pojemność
i
wydajność.
Wykorzystywane
są
trzy
parametry
będące miarą wydajności:
Czas dostępu;
Czas cyklu pamięci;
Szybkość przesyłania (transferu).
Czas dostępu
W przypadku pamięci o dostępie swobodnym
jest to czas niezbędny do zrealizowania
operacji odczytu lub zapisu, to znaczy czas
od chwili doprowadzenia adresu do chwili
zmagazynowania lub udostępnienia danych.
W
przypadku
pamięci
o
dostępie
nieswobodnym czas dostępu jest czasem
potrzebnym na umieszczenie mechanizmu
odczytu-zapisu w pożądanym miejscu.
Czas cyklu pamięci
Pojęcie to było pierwotnie stosowane do
pamięci o dostępie swobodnym.
Czas cyklu składa się z czasu dostępu oraz
z dodatkowego czasu, który musi upłynąć,
zanim będzie mógł nastąpić kolejny dostęp.
Ten dodatkowy czas może być potrzebny
dla zaniku sygnałów przejściowych lub do
regeneracji danych, jeśli odczyt jest
niszczący.
Szybkość przesyłania
(transferu)
Jest to szybkość, z jaką dane mogą być wprowadzane
do jednostki pamięci lub z niej wyprowadzane.
W przypadku pamięci o dostępie swobodnym jest ona
równa 1/(czas cyklu).
W przypadku pamięci o dostępie nieswobodnym
zachodzi następująca zależność:
gdzie:
T
N
– średni czas odczytu lub zapisu N bajtów
T
A
– średni czas dostępu
R – szybkość transferu w bitach na sekundę
R
N
T
T
A
N
Fizyczny rodzaj pamięci
Wykorzystywane są różne fizyczne rodzaje
pamięci. Dwa najbardziej powszechne
spośród nich obecnie to:
pamięć
półprzewodnikowa,
wykonana w technologii LSI lub VLSI, oraz
powierzchniowa
pamięć
magnetyczna w postaci dysków i taśm.
Własności fizyczne
W pamięci ulotnej informacja zanika naturalnie lub jest
tracona po wyłączeniu zasilania.
W pamięci nieulotnej informacja raz zapisana nie zmienia się
aż do chwili zamierzonej zmiany; zasilanie elektryczne nie jest
niezbędne do zachowania informacji.
– Powierzchniowe pamięci magnetyczne są nieulotne.
– Pamięć półprzewodnikowa może być albo ulotna, albo
nieulotna.
Zawartość pamięci niewymazywalnej nie może być
zmieniana, z wyjątkiem wypadku zniszczenia jednostki
pamięciowej. Pamięć półprzewodnikowa tego typu jest znana
jako pamięć stała (ang. read-only memory - ROM).
– Z konieczności pamięć niewymazywalna musi być także
nieulotna.
Organizacja
W
przypadku
pamięci
o
dostępie
swobodnym podstawowym problemem
przy projektowaniu jest organizacja.
Przez
organizację
rozumiemy tutaj
fizyczne uporządkowanie bitów w celu
uformowania słów. Jak wyjaśnimy, nie
zawsze
wykorzystywane
jest
uporządkowanie,
które
wydaje
się
oczywiste.
Ile? Jak szybko? Za ile?
Ograniczenia przy projektowaniu pamięci komputera mogą być
podsumowane za pomocą trzech pytań: Ile? Jak szybko? Za ile?
Pytanie „Ile?” jest wciąż w pewnym stopniu otwarte. Jeśli
dysponujemy określoną pojemnością, to z pewnością pojawi się
zastosowanie, w którym pojemność ta zostanie wykorzystana.
Odpowiedź na pytanie „Jak szybko?" jest w pewnym sensie
łatwiejsza. Aby osiągnąć największą wydajność, pamięć musi
być w stanie nadążyć za procesorem. Znaczy to, że nie
chcielibyśmy, aby procesor, wykonując rozkazy, czekał na
rozkazy lub argumenty.
Ostatnie z pytań również musi być rozważone. W przypadku
praktycznego systemu koszt pamięci musi pozostawać w
rozsądnej relacji do kosztu pozostałych składników.
Dylematy projektanta
Jak można było się spodziewać, istnieją wzajemne zależności między
podstawowymi parametrami pamięci, to znaczy między kosztem,
pojemnością i czasem dostępu. Jak zawsze przy konstruowaniu
systemów pamięciowych są wykorzystywane różne technologie. Jeśli
rozpatrujemy dostępne technologie, to zauważamy następujące
zależności:
mniejszy czas dostępu - większy koszt na bit,
większa pojemność - mniejszy koszt na bit,
większa pojemność - większy czas dostępu.
Dylemat, przed którym stoi projektant, jest jasny. Chciałby on
wykorzystać technologie pamięci, które umożliwiają wytworzenie
pamięci o dużej pojemności, ponieważ po pierwsze są one potrzebne,
a po drugie z powodu mniejszego kosztu na bit. Jednak aby osiągnąć
wymaganą wydajność, projektant wykorzystuje drogie i stosunkowo
małej pojemności pamięci o krótkim czasie dostępu.
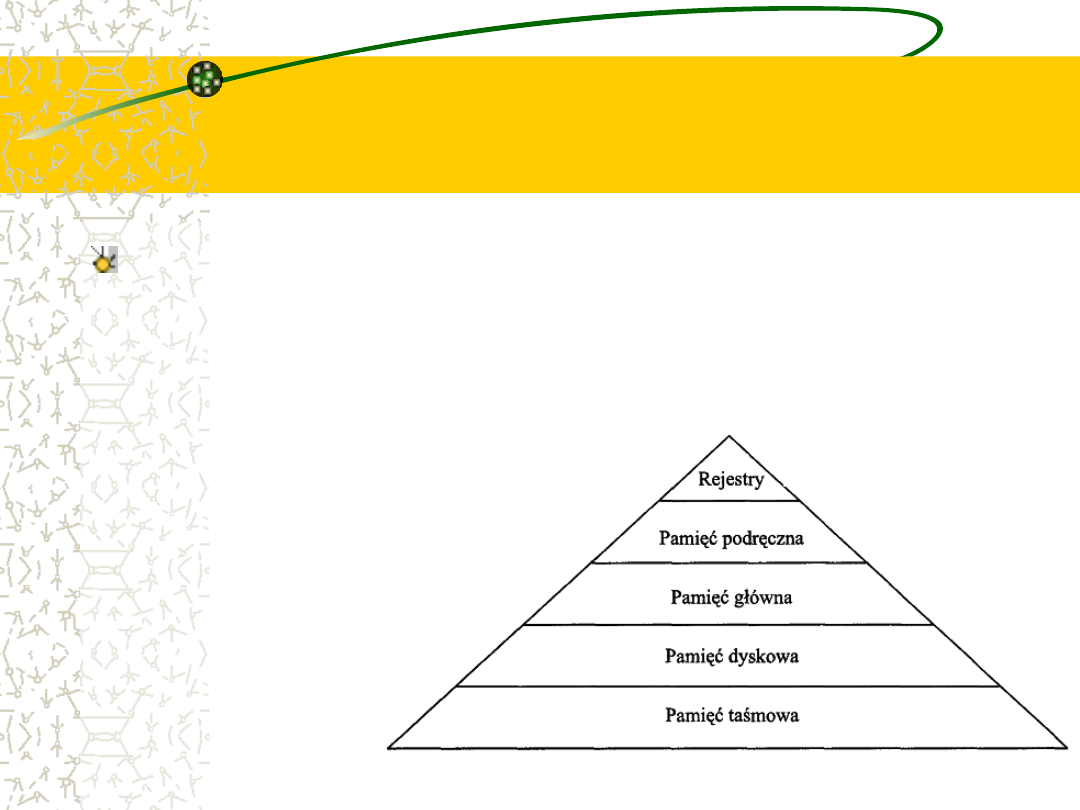
Hierarchia pamięci
Osiągnięcie kompromisu nie polega na wyborze
pojedynczego zespołu pamięci czy też określonej
technologii, lecz na wykorzystaniu hierarchii
pamięci. Rozpatrując tę hierarchię w kierunku od
góry do dołu, obserwujemy następujące zjawiska:
a) malejący koszt na bit,
b) rosnąca pojemność,
c) rosnący czas dostępu,
d) malejącą
częstotliwość
dostępu
do
pamięci
przez procesor.
Współczesna hierarchia
pamięci
Jeśliby pamięć mogła być zorganizowana
przy uwzględnieniu zjawisk (a), (b) oraz (c)
i jeśli dane i rozkazy byłyby rozmieszczone
w pamięci przy uwzględnieniu (d), to
sądzimy
intuicyjnie,
że
taki
schemat
zredukowałby
łączne
koszty,
pozostawiając
określony
poziom
wydajności.
Przykład
Załóżmy, że procesor ma dostęp do dwóch poziomów
pamięci. Poziom pierwszy zawiera 1000 słów i ma czas
dostępu 1μs.
Poziom 2 zawiera 100 000 słów i ma czas dostępu 10μs.
Załóżmy dalej, że jeśli poszukiwane słowo znajduje się na
poziomie 1, to procesor ma do niego dostęp bezpośredni.
Jeśli natomiast jest ono na poziomie 2, to słowo jest
najpierw przenoszone na poziom 1, a następnie
udostępniane procesorowi.
Dla uproszczenia zaniedbajmy czas wymagany do tego,
aby procesor określił, czy słowo znajduje się na
pierwszym, czy też na drugim poziomie.
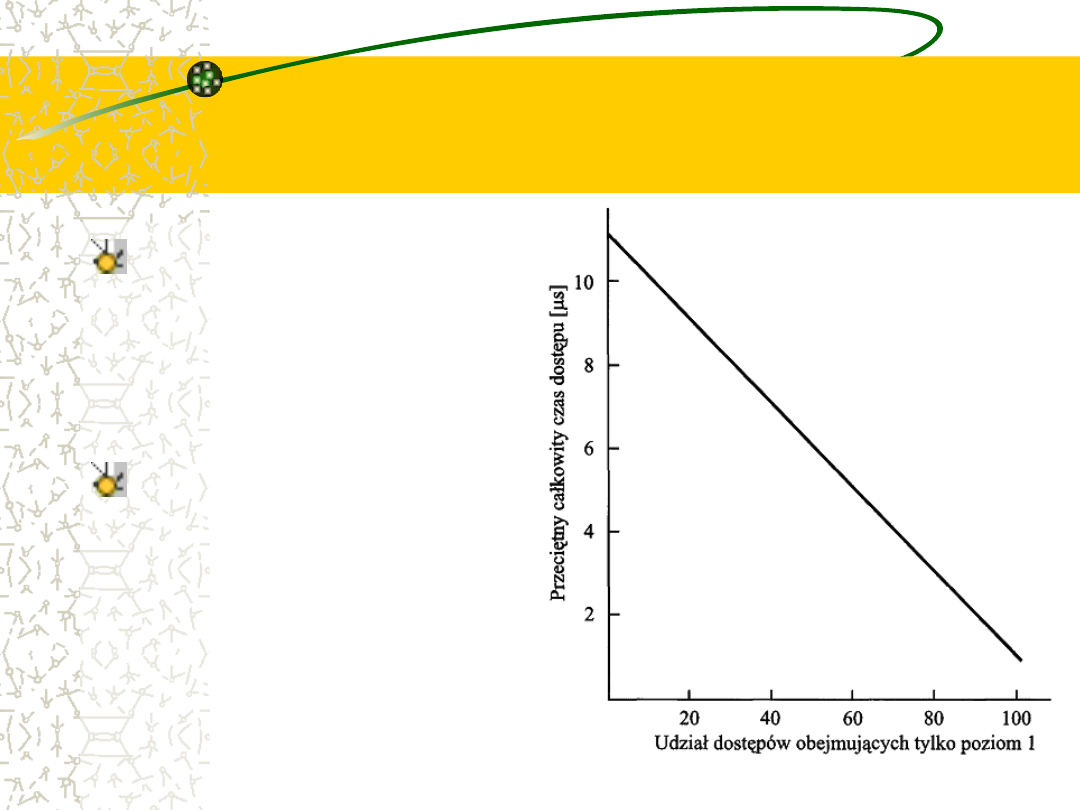
Przykład
Na rysunku jest pokazany
średni
całkowity
czas
dostępu
jako
funkcja
procentu czasu, w ciągu
którego
słowo
jest
znajdywane od razu na
poziomie 1.
Jak można zauważyć, przy
wysokim
udziale
bezpośrednich dostępów do
poziomu 1, średni całkowity
czas dostępu jest o wiele
bliższy
temu
czasowi
charakterystycznemu
dla
poziomu 1 niż dla 2.
Lokalność odniesień
Podstawą słuszności warunku (d) jest zasada lokalności
odniesień (locality of reference).
Podczas wykonywania programu odniesienia do pamięci
(zarówno dotyczące danych, jak i rozkazów) mają tendencję
do gromadzenia się. Programy typowo zawierają pewną
liczbę pętli iteracyjnych i podprogramów.
Gdy jest uruchomiona pętla lub podprogram, występują
powtarzające się odniesienia do niewielkiego zestawu
rozkazów. Podobnie, operacje na tablicach lub ciągach
danych polegają na dostępie do zgrupowanego zespołu słów.
W ciągu długiego czasu wykorzystywane ugrupowania
zmieniają się, jednak w krótkim czasie procesor pracuje z
ustalonymi grupami odniesień do pamięci.
Przykład cd.
W tej sytuacji jest możliwa taka organizacja układu danych w
hierarchii pamięci, żeby udział dostępów do każdego kolejnego
niższego poziomu był istotnie mniejszy niż do poziomu wyższego.
Rozpatrzmy dwupoziomowy przykład przedstawiony powyżej.
Przyjmijmy, że poziom 2 pamięci zawiera wszystkie rozkazy i
dane programu.
Bieżące ugrupowania danych mogą być czasowo umieszczane na
poziomie 1. Od czasu do czasu niektóre ugrupowania danych
będą musiały być przenoszone na poziom 2, żeby zwolnić
miejsce dla nowych zbiorów wprowadzanych do poziomu 1.
Przeciętnie jednak większość odniesień będzie dotyczyła
rozkazów i danych zawartych na poziomie 1.
Zasada ta może być stosowana do systemów zawierających
więcej niż dwa poziomy.
Organizacja hierarchii
pamięci
Najszybszy, najmniejszy i najdroższy rodzaj pamięci obejmuje
rejestry zawarte wewnątrz procesora. Typowo procesor zawiera
kilka tuzinów takich rejestrów, chociaż niektóre maszyny mają
ich setki.
Dwa poziomy niżej znajduje się pamięć główna, będąca
zasadniczym wewnętrznym systemem pamięciowym komputera.
Każda lokacja w pamięci głównej ma swój unikatowy adres, a
większość rozkazów maszynowych odnosi się do jednego lub
wielu adresów w pamięci głównej.
Pamięć główna jest zwykle poszerzana za pomocą szybszej i
mniejszej pamięci podręcznej. Ta ostatnia nie jest zwykle
widzialna dla programisty czy też, w istocie, dla procesora.
Urządzenie to stopniuje przepływ danych między pamięcią
główną a rejestrami procesora i ma na celu poprawienie
wydajności.
Organizacja hierarchii
pamięci
Trzy opisane wyżej rodzaje pamięci są zwykle ulotne i są
wykonane w technologii półprzewodnikowej. Zastosowanie
układu trójpoziomowego pozwala na wykorzystanie dostępnych
obecnie typów pamięci półprzewodnikowych różniących się
szybkością i kosztem.
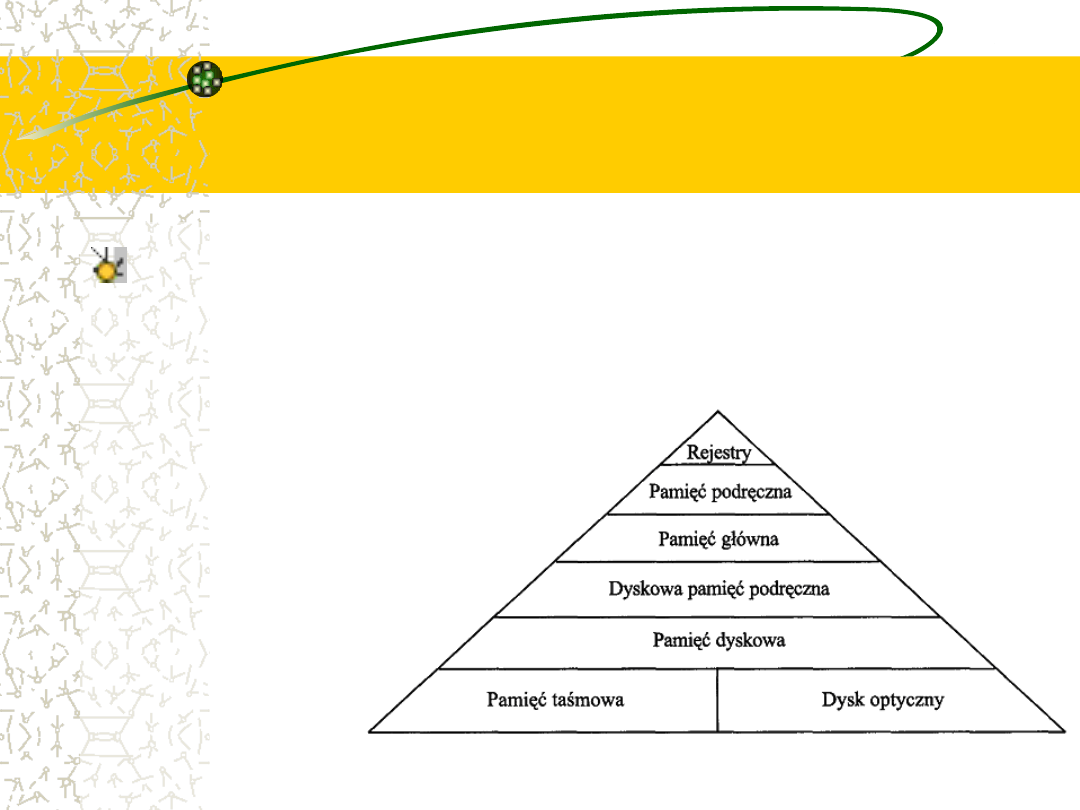
Dane są przechowywane w sposób trwalszy w zewnętrznych,
masowych
urządzeniach
pamięciowych,
z
których
najpowszechniejsze są pamięci dyskowe i taśmowe. Do innych
postaci pamięci wtórnych należą dyski optyczne
Zewnętrzne pamięci nieulotne są określane jako pamięci wtórne
lub pomocnicze. Są używane do przechowywania programów i
plików danych; programista widzi je tylko poprzez pliki i rekordy,
a nie przez pojedyncze bajty czy słowa. Dyski są także
wykorzystywane do rozszerzania pamięci głównej, jako pamięci
wirtualne.
Bufory tymczasowego
przechowywania danych
Dodatkowe poziomy mogą być skutecznie dodane do hierarchii
za pomocą oprogramowania. Część pamięci głównej może być
wykorzystywana jako bufor do tymczasowego przechowywania
danych, które następnie mają być odczytane i wyprowadzone
na dysk. Taka technika, określana czasem jako dyskowa pamięć
podręczna , poprawia wydajność na dwa sposoby:
Zapisy dyskowe są zgrupowane. W miejsce wielu transferów
niewielkich ilości danych mamy do czynienia z niewieloma
wielkimi transferami. Poprawia to wydajność dysku i
minimalizuje zaangażowanie procesora.
Pewne dane przeznaczone do odczytania mogą być określone
przez program jeszcze przed następnym sięgnięciem do dysku.
W tym przypadku dane te mogą być wydobyte szybko z
programowej pamięci podręcznej, a nie powoli z dysku.
Pamięć główna
We wcześniejszych komputerach najpowszechniejszą
formą komputerowych pamięci głównych o swobodnym
dostępie były zespoły pierścieni ferromagnetycznych
nazywanych rdzeniami. Dlatego też pamięci główne
tego rodzaju były nazywane rdzeniowymi.
Termin ten funkcjonuje do dziś. Dość długo trwało,
zanim
nadejście
mikroelektroniki
i
jej
zalety
spowodowały
ustąpienie
rdzeniowych
pamięci
magnetycznych.
Dzisiaj
zastosowanie
mikroukładów
półprzewodnikowych w pamięciach głównych jest
prawie uniwersalne.
Rodzaje pamięci
półprzewodnikowych o
dostępie swobodnym
Wszystkie rodzaje pamięci rozpatrywane w tej części
charakteryzują się dostępem swobodnym. Znaczy to, że
pojedyncze słowa w pamięci są dostępne bezpośrednio za
pomocą wbudowanych układów logicznych adresowania.
W tabeli (następny slajd) są wymienione główne rodzaje
pamięci
półprzewodnikowych.
Najpowszechniejsza
jest
określana jako pamięć o dostępie swobodnym (RAM).
Oczywiście jest to niewłaściwe wykorzystanie tego określenia,
ponieważ wszystkie rodzaje pamięci wymienione w tablicy są
pamięciami o dostępie swobodnym. Cechą wyróżniającą
pamięci RAM jest to, że możliwe jest zarówno odczytanie
danych z pamięci, jak też łatwe i szybkie zapisanie do niej
nowych danych. Zarówno odczyt, jak i zapis są dokonywane
za pomocą sygnałów elektrycznych.
Rodzaje pamięci
półprzewodnikowych
Rodzaj pamięci
Kateg
oria
Wymazywanie Sposób
zapisu
Ulotno
ść
Pamięć o dostępie
swobodnym (RAM)
odczyt-
zapis
elektryczne, na
poziomie bajta
elektryc
zny
ulotna
Pamieć
stała
(ROM)
tylko
odczyt
Niemożliwe
maski
nieulot
ne
Programowalna
pamięć
stała
(PROM)
elektryc
zny
Wymazywalna
PROM (EPROM)
główni
e
odczyt
światłem
UV,
na
poziomie
mikroukładu
Pamięć
błyskawiczna
(FLASH)
elektryczne, na
poziomie bloku
Elektrycznie
wymazywalna
PROM (EEPROM)
elektryczne, na
poziomie bajta
Ulotność, pamięć
statyczna i dynamiczna
Inną własnością wyróżniającą pamięci RAM jest ich ulotność. Pamięć
RAM musi mieć źródło stałego zasilania. Jeśli zasilanie jest przerwane,
dane są tracone. Pamięć RAM może więc być używana tylko do
przechowywania czasowego. Pamięci RAM można podzielić na
statyczne i dynamiczne.
Dynamiczna pamięć RAM jest wykonana z komórek, które
przechowują dane podobnie, jak kondensatory przechowują ładunek
elektryczny. Obecność lub brak ładunku w kondensatorze są
interpretowane jako binarne 1 lub 0. Ponieważ kondensatory mają
naturalną tendencję do rozładowywania się, dynamiczne pamięci
RAM wymagają okresowego odświeżania ładunku w celu zachowania
danych.
W
statycznych
pamięciach
RAM
wartości
binarne
są
przechowywane za pomocą przerzutnikowych konfiguracji bramek
logicznych. Statyczne pamięci RAM zachowują dane tak długo, jak
długo są zasilane.
Statyczne vs. dynamiczne
Zarówno statyczne, jak i dynamiczne pamięci RAM są ulotne.
Dynamiczna komórka pamięciowa jest prostsza i dzięki temu
mniejsza niż statyczna. W rezultacie dynamiczna pamięć RAM
jest gęściej upakowana (mniejsze komórki = więcej komórek
na jednostkę powierzchni) i tańsza niż odpowiadająca jej
statyczna pamięć RAM.
Z drugiej strony, dynamiczna pamięć RAM wymaga układów
odświeżania. W przypadku dużych pamięci stały koszt układów
odświeżania jest z nawiązką skompensowany przez mniejszy,
zmienny koszt dynamicznych komórek pamięciowych.
W
rezultacie
istnieje
tendencja
do
faworyzowania
dynamicznych pamięci RAM w dużych pamięciach.
Statyczne pamięci RAM są nieco szybsze niż dynamiczne.

ROM
Silny kontrast w stosunku do pamięci RAM stanowią pamięci stałe
(read-only memory- ROM). Jak sugeruje ich nazwa, pamięci ROM
zawierają trwały wzór danych, który nie może być zmieniony. Podczas
gdy jest możliwe odczytywanie pamięci ROM, nie można zapisać w nich
nowych danych.
W przypadku umiarkowanych wymagań zaletą pamięci ROM jest to, że
dane lub program pozostają na stałe w pamięci głównej i nigdy nie
wymagają ładowania z urządzeń pamięci wtórnej.
Pamięć ROM powstaje podobnie, jak wszystkie mikroukłady scalone,
przy czym dane są wbudowywane podczas procesu wytwarzania.
Wynikają z tego dwa problemy.
Umieszczaniu danych w pamięci towarzyszy stosunkowo duży koszt
stały, niezależny od tego, czy wytwarza się 1000 kopii określonego
układu, czy tylko jedną.
Nie może wystąpić błąd. Jeśli jeden bit jest niewłaściwy, cała partia
układów ROM musi być wyrzucona.
PROM
Jeśli potrzebna jest tylko niewielka pamięć ROM o
określonej zawartości, tańszym rozwiązaniem jest
wykorzystanie programowalnej pamięci ROM (PROM).
Podobnie jak ROM pamięć PROM jest nieulotna i można
ją zapisać tylko raz. W przypadku pamięci PROM zapis
jest realizowany elektrycznie i może być wykonany przez
dostawcę lub przez klienta już po wyprodukowaniu
mikroukładu.
Do zapisu (lub „programowania") wymagane są
specjalne urządzenia. Pamięci PROM zapewniają
elastyczność i wygodę. Pamięci ROM natomiast
pozostają atrakcyjne w przypadku dużych ilości
produkowanego sprzętu.
Pamięci głównie do
odczytu
Inną odmianą pamięci stałych jest pamięć
głównie
do
odczytu
(read-mostly
memory), która jest użyteczna wtedy, gdy
operacje zapisu są znacznie częstsze niż
operacje zapisu, natomiast wymagana jest
nieulotność.
Powszechnie znane są trzy odmiany pamięci
głównie do odczytu: EPROM, EEPROM i
tzw. pamięć błyskawiczna (flash memory).
EPROM
Optycznie wymazywalna programowalna pamięć stała
(EPROM) jest odczytywana i zapisywana elektrycznie,
podobnie jak PROM.
Jednak przed operacją zapisu wszystkie komórki pamięci
muszą być wymazane przez naświetlenie znajdującego się już
w obudowie układu promieniowaniem ultrafioletowym. Proces
wymazywania może być wykonywany wielokrotnie; każde
wymazanie trwa do około 20 minut.
Zawartość pamięci EPROM może więc być zmieniana wiele
razy, poza tym pamięć ta przechowuje dane permanentnie,
jak ROM i PROM.
Przy porównywalnej pojemności pamięć EPROM jest droższa
niż PROM, jednak ma zaletę możliwości wielokrotnej
aktualizacji zawartości.
EEPROM
Bardziej atrakcyjną odmianą pamięci głównie do odczytu
jest
elektrycznie
wymazywalna
programowalna
pamięć stała (EEPROM).
Jest to pamięć głównie do odczytu, która może być
zapisana bez wymazywania poprzedniej zawartości;
aktualizowany jest tylko bajt (lub bajty) adresowane.
Operacja zapisu trwa znacznie dłużej niż odczytu i zajmuje
czas rzędu kilkuset mikrosekund na bajt.
EEPROM łączy zaletę nieulotności z możliwością aktualizacji
na miejscu, przy wykorzystaniu zwykłych magistralowych
linii sterowania, adresów i danych.
EEPROM jest droższa niż EPROM, a także mniej gęsto
upakowana (zawiera mniej bitów w mikroukładzie).
Pamięć błyskawiczna
Najnowszą postacią pamięci półprzewodnikowej jest pamięć
błyskawiczna (nazwana tak z powodu szybkości, z jaką może być
reprogramowana).
Wprowadzono ją po raz pierwszy w połowie lat osiemdziesiątych.
Zajmuje miejsce pośrednie między EPROM i EEPROM zarówno pod
względem kosztu, jak i funkcjonalności. Podobnie jak w EEPROM w
pamięci błyskawicznej wykorzystuje się metodę wymazywania
elektrycznego.
Cała pamięć błyskawiczna może być wymazana w ciągu kilku sekund,
a więc o wiele szybciej niż EPROM. Ponadto możliwe jest
wymazywanie bloków pamięci zamiast całego mikroukładu. Jednak
pamięć błyskawiczna nie umożliwia wymazywania na poziomie bajtów.
Podobnie jak w EPROM w pamięci błyskawicznej wykorzystuje się tylko
jeden tranzystor na bit, osiągając przez to wysoką gęstość
upakowania, podobną do EPROM.
Cechy komórek pamięci
Podstawowym
elementem
pamięci
półprzewodnikowej jest komórka pamięci. Chociaż
są wykorzystywane różne technologie, wszystkie
komórki pamięci półprzewodnikowych mają pewne
wspólne cechy:
Mają dwa stabilne (lub półstabilne) stany, które
mogą być użyte do reprezentowania binarnych 1 i
0.
Umożliwiają zapis (przynajmniej jednokrotny).
Umożliwiają odczyt.
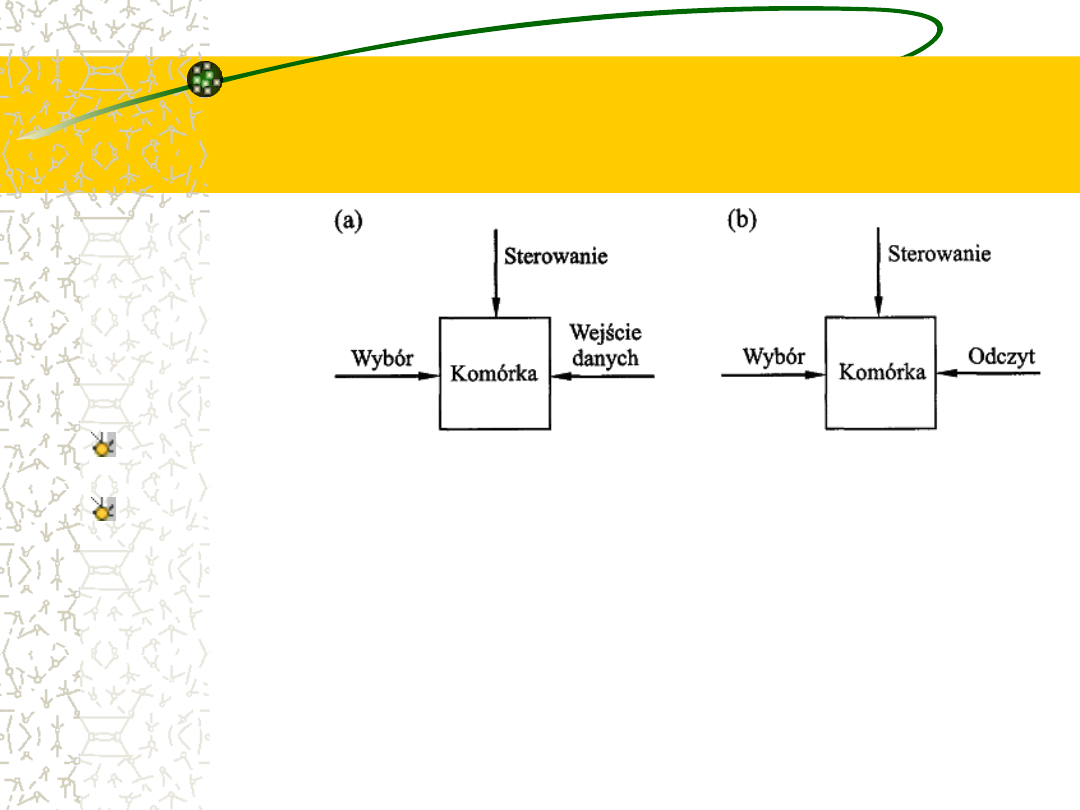
Działanie komórki
pamięci:
(a) zapis (b) odczyt
Na rysunku w sposób schematyczny, pokazano działanie komórki
pamięci.
Najczęściej komórka ma trzy końcówki funkcyjne służące do
przenoszenia sygnału elektrycznego.
–
Końcówka wyboru, jak sama nazwa wskazuje, służy do wybierania
komórki pamięci w celu przeprowadzenia operacji odczytu lub zapisu.
–
Końcówka sterowania umożliwia wskazanie rodzaju operacji (zapis lub
odczyt).
–
W przypadku zapisu przez inną końcówkę wprowadzany jest sygnał
elektryczny, który ustala stan komórki na 1 lub 0. W przypadku odczytu
ta sama końcówka służy do wyprowadzania sygnału o stanie komórki.
Pamięć – układ scalony w
obudowie
Podobnie jak inne układy scalone, pamięć
półprzewodnikowa
jest
w
postaci
obudowanego mikroukładu (rys.).
Każdy mikroukład zawiera zestaw komórek
pamięci. W przypadku aktualnie dostępnej
technologii, powszechne są mikroukłady o
pojemności
256
Mbit,
natomiast
wprowadzane są do użytku mikroukłady o
pojemności 1024 Mbit.
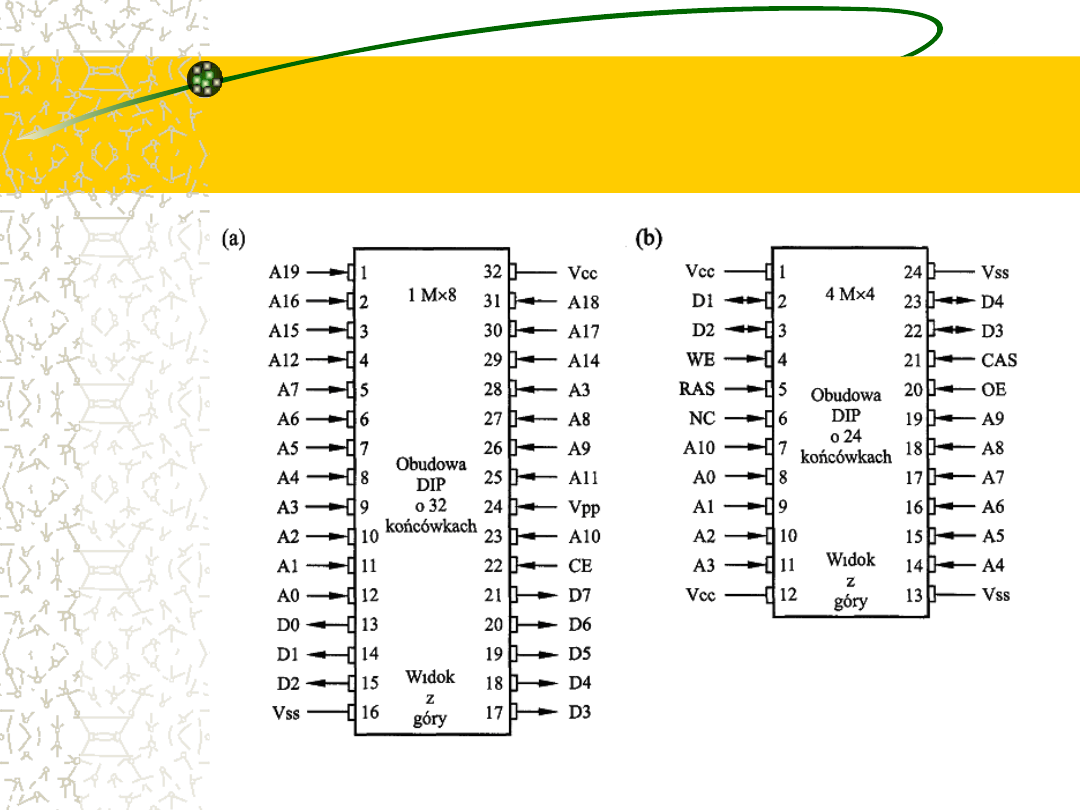
Rozkład wyprowadzeń i sygnały
typowej obudowy mikroukładu
pamięciowego: (a) pamięć EPROM
8Mbit, (b) pamięć DRAM 16Mbit
Układy logiczne
mikroukładu
Jak widzieliśmy, w hierarchicznym układzie pamięci występują
współzależności między szybkością, pojemnością a kosztem. Takie
współzależności istnieją również, jeśli rozpatrujemy organizację
komórek pamięci i funkcjonalne układy logiczne zawarte w
mikroukładzie.
W przypadku pamięci półprzewodnikowych jednym z kluczowych
problemów projektowych jest liczba bitów danych, które mogą być
jednocześnie odczytywane lub zapisywane.
– Na jednym biegunie znajduje się organizacja, w której fizyczne
uporządkowanie komórek w układzie jest takie samo, jak
uporządkowanie logiczne (postrzegane przez procesor) słów w
pamięci. Komórki są wtedy zorganizowane w postaci W słów B-
bitowych. Na przykład mikroukład 16 Mbit może być zorganizowany
jako 1 M (milion) słów 16-bitowych.
– Na drugim biegunie znajduje się organizacja 1-bitowa, w przypadku
której w określonym czasie odczytuje się lub zapisuje tylko jeden bit.
Przykład. Organizacja 16
Mbitowej pamięci RAM
Na rys. jest pokazana typowa organizacja 16-
megabitowej pamięci DRAM. W tym przypadku
jednocześnie mogą być odczytywane lub zapisywane 4
bity.
Logicznie
rzecz
biorąc,
zespół
pamięci
jest
zorganizowany w postaci 4 kwadratowych układów 2048
na 2048 elementów. Możliwe są różne organizacje
fizyczne. W każdym przypadku elementy zespołu są
połączone zarówno przez linie poziome (wiersze), jak i
pionowe (kolumny). Każda linia pozioma jest połączona z
końcówkami „wybór” każdej komórki w wierszu; każda
linia
pionowa
jest
połączona
z
końcówkami
„zapis/odczyt” każdej komórki w kolumnie.
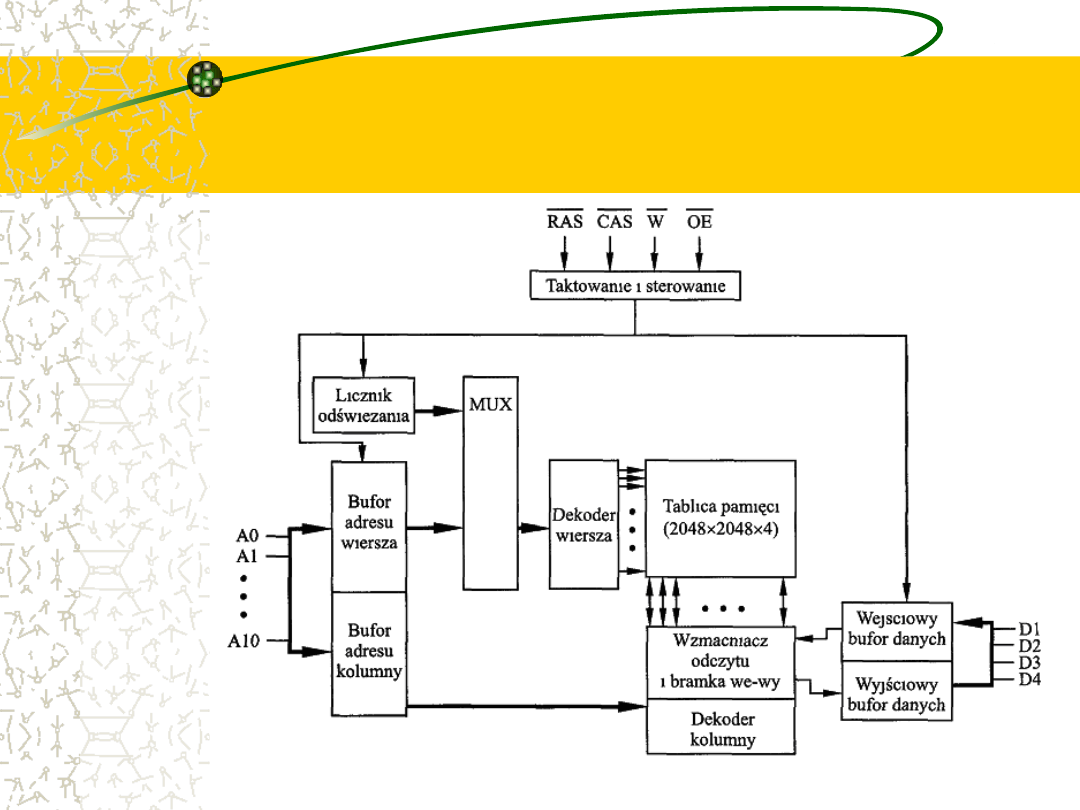
Przykład. Organizacja 16
Mbitowej pamięci RAM
Linie adresowe
Linie adresowe dostarczają adres słowa, które ma
być wybrane. Łącznie potrzeba log
2
W linii. W naszym
przykładzie wymaganych jest 11 linii w celu
wybrania 1 z 2048 wierszy. Linie te są doprowadzone
do dekodera wiersza mającego 11 linii wejściowych i
2048
wyjściowych.
Układ
logiczny
dekodera
aktywuje jedną z 2048 linii zależnie od wzoru
bitowego na 11 liniach wejściowych (2
11
=2048).
Dodatkowe 11 linii adresu wybiera 1 z 2048 kolumn,
przy czym na 1 kolumnę przypadają 4 bity. W celu
wprowadzania i wyprowadzania 4 bitów z bufora
danych są wykorzystywane 4 linie danych.
Linie adresowe
Na wejściu (zapis) sterownik bitowy każdej linii bitu jest
aktywowany do 1 lub 0, zależnie od wartości
odpowiedniej linii danych. Na wyjściu (odczyt) sygnał z
każdej
linii
bitowej jest
doprowadzany
poprzez
wzmacniacz odczytu do linii danych. Za pomocą linii
wiersza dokonuje się wyboru, który wiersz komórek jest
wykorzystywany przy odczycie lub zapisie.
Ponieważ do tej pamięci DRAM są zapisywane (lub
odczytywane) jednocześnie tylko 4 bity, wiele takich
pamięci musi być połączonych ze sterownikiem pamięci
w celu umożliwienia odczytu lub zapisu słowa i
przekazania go do magistrali.
Przeznaczenie RAS i CAS
Zauważmy, że występuje tylko 11 linii adresu (A0-A10),
połowa liczby, której moglibyśmy się spodziewać dla zespołu
2048 x 2048.
Czyni się tak, aby zmniejszyć liczbę doprowadzeń do układu.
Wymagane linie adresu (22) przechodzą przez układy logiczne
wyboru zewnętrzne w stosunku do mikroukładu, po czym są
multipleksowane do 11 linii adresu.
Najpierw do mikroukładu doprowadza się 11 sygnałów
adresowych określających adres wiersza w zespole, po czym
11 pozostałych sygnałów adresowych określa adres kolumny.
Sygnałom tym towarzyszą sygnały: wyboru adresu wiersza
(RAS) i wyboru adresu kolumny (CAS) umożliwiające
sterowanie czasowe mikroukładu.
Odświeżanie
Na rysunku są również pokazane układy odświeżania.
Wszystkie
pamięci
DRAM
wymagają
operacji
odświeżania.
Prostym sposobem odświeżania jest uniemożliwienie
używania mikroukładu DRAM w czasie, gdy wszystkie
komórki danych są odświeżane.
Licznik
odświeżania
przechodzi
kolejno
przez
wszystkie wiersze.
W przypadku każdego wiersza linie wyjściowe licznika
odświeżania są łączone z dekoderem wiersza i
wzbudzana jest linia RAS. Powoduje to odświeżenie
każdej komórki w wierszu.
Montaż układów EPROM w
obudowie
Na rysunku (a) (slajd 46) jest pokazana
przykładowa
obudowa
pamięci
EPROM
o
pojemności 8 Mbit, zorganizowanej jako 1M x 8.
W tym przypadku organizacja ta może być
traktowana jako oparta na słowach.
Obudowa ma 32 końcówki, co jest jednym z
rozwiązań
standardowych.
Końcówkom
są
przypisywane następujące linie sygnałowe:
– adres słowa; w przypadku 1M słów wymagane
jest 20 (2
20
= 1 M) końcówek (A0-A19);
– odczytywane dane, wymagające 8 linii (DO-D7);
Montaż układów EPROM w
obudowie
– zasilanie mikroukładu (V
cc
), uziemienie (V
ss
)
– uaktywnienie mikroukładu (CE); ponieważ może
występować wiele mikroukładów pamięciowych, z
których każdy jest dołączony do tej samej szyny
adresowej, końcówka CE jest wykorzystywana do
określania, czy adres dotyczy danego mikroukładu;
końcówka CE jest pobudzana przez układy logiczne
dołączone do linii najbardziej znaczących bitów
szyny adresowej (tzn. do linii bitów powyżej A19).
– napięcie
programowania
(V
pp
),
które
jest
doprowadzane podczas programowania (operacje
zapisu).
Montaż układów DRAM w
obudowie
Typowy układ końcówek pamięci DRAM jest pokazany na rys.
(b) dla mikroukładu 16 Mbit zorganizowanego jako 4 M x 4.
Występuje tu kilka różnic w stosunku do układu ROM. Ponieważ
pamięć RAM może być aktualizowana, końcówki danych są
końcówkami wejścia/wyjścia.
Końcówki
zezwolenia
zapisu
(WE)
i
zezwolenia
na
wyprowadzanie (OE) wskazują na to, czy prowadzona jest
operacja zapisu lub odczytu.
Ponieważ pamięć DRAM jest adresowana za pomocą wierszy i
kolumn, a adres jest multipleksowany, tylko 11 końcówek
adresu potrzeba do określenia 4M kombinacji wiersz/kolumna
(2
11
x2
11
=2
22
=4M).
Funkcje wyboru adresu wiersza (RAS) i wyboru adresu kolumny
(CAS) zostały już przedyskutowane uprzednio.
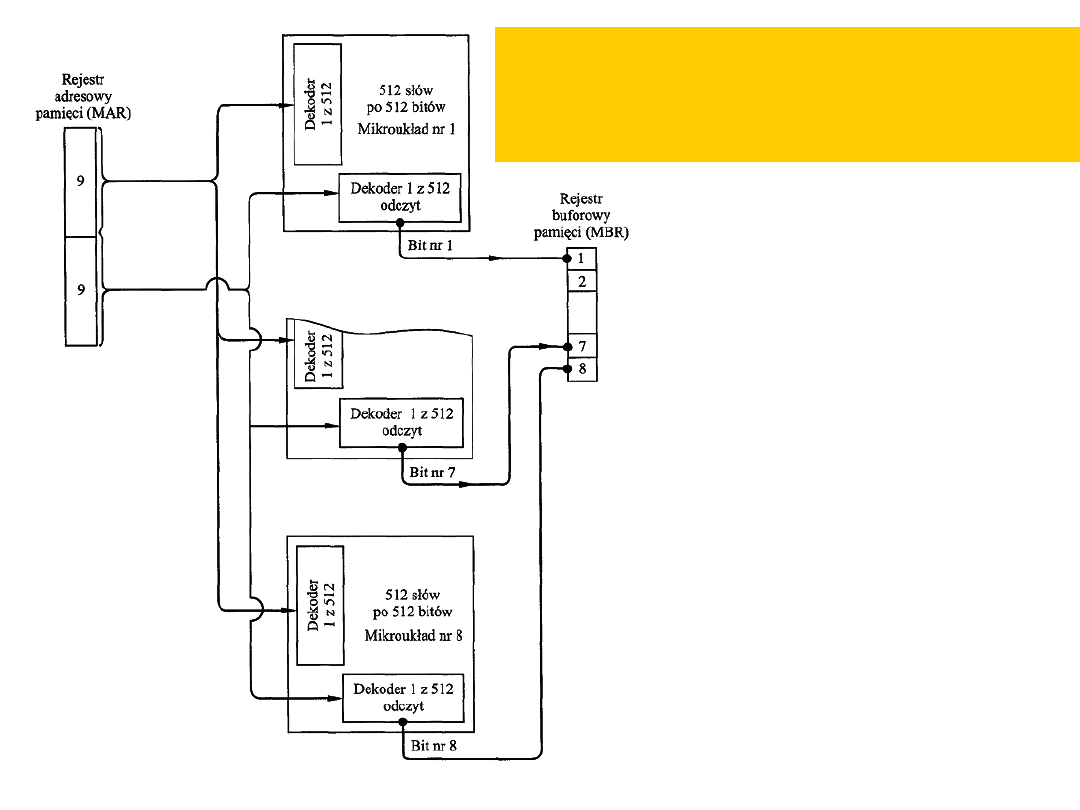
Organizacja modułu
Jeśli mikroukład RAM zawiera tylko 1 bit na słowo,
będziemy oczywiście potrzebowali przynajmniej
liczby mikroukładów równej liczbie bitów w słowie. Na
rysunku jest pokazane przykładowo, jak może być
zorganizowany moduł pamięci zawierający 256K słów
8-bitowych.
W przypadku 256K słów wymagany jest adres 18-
bitowy; jest on dostarczany do modułu z pewnego
źródła zewnętrznego (np. z linii adresowych
magistrali, do której moduł jest dołączony).
Adres jest doprowadzany do 8 mikroukładów 256K1,
z których każdy umożliwia wejście/wyjście 1 bita.
Organizacja
pamięci 256KB
Organizacja pamięci 1MB
Organizacja taka jest odpowiednia, dopóki rozmiar pamięci
mierzony w słowach jest równy liczbie bitów w mikroukładzie.
W przypadku gdy wymagana jest większa pamięć, potrzebna jest
matryca mikroukładów. Na kolejnym rysunku jest pokazana
możliwa organizacja pamięci składającej się z 1M słów 8-
bitowych.
W tym przypadku występują 4 kolumny mikroukładów; każda
kolumna zawiera 256K słów uporządkowanych w sposób
pokazany na poprzednim rys.
W przypadku 1M słów wymaganych jest 20 linii adresowych.
Osiemnaście najmniej znaczących bitów doprowadza się do
wszystkich 32 modułów. Dwa najbardziej znaczące bity są
doprowadzone do modułu logicznego wyboru grupy, który wysyła
sygnał uaktywnienia mikroukładu do jednej z 4 kolumn modułów.
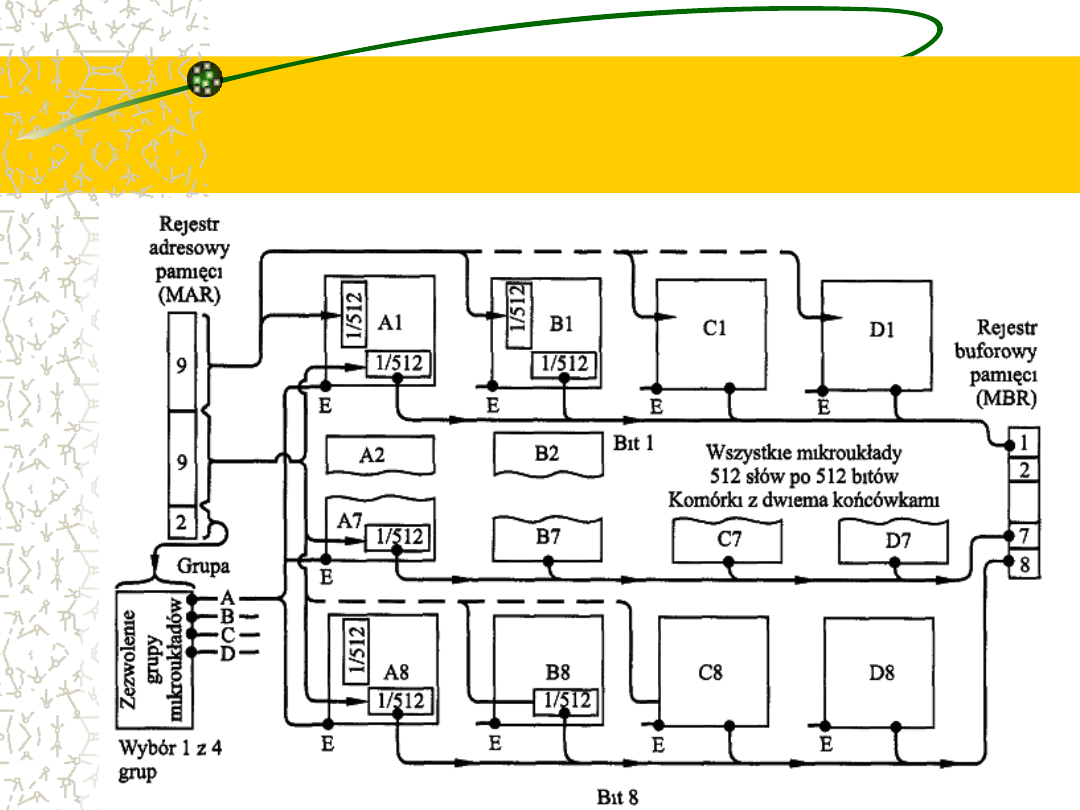
Organizacja pamięci 1MB
Błędy stałe i przypadkowe
W systemach pamięci półprzewodnikowych występują błędy.
Można je podzielić na błędy stałe i przypadkowe.
Błąd stały jest permanentnym defektem fizycznym
powodującym, że uszkodzona komórka lub komórki
pamięciowe nie są w stanie niezawodnie przechowywać
danych, lecz pozostają w stanie 0 lub 1, albo błędnie
przeskakują między 0 a 1. Błędy stałe mogą być wywołane
przez działanie ostrych narażeń środowiskowych, defekty
produkcyjne lub zużycie.
Błąd przypadkowy jest losowym i nieniszczącym
zjawiskiem, które zmienia zawartość jednej lub wielu
komórek pamięciowych, bez uszkadzania samej pamięci.
Błędy takie mogą być spowodowane przez problemy
zasilania lub cząsteczki alfa.
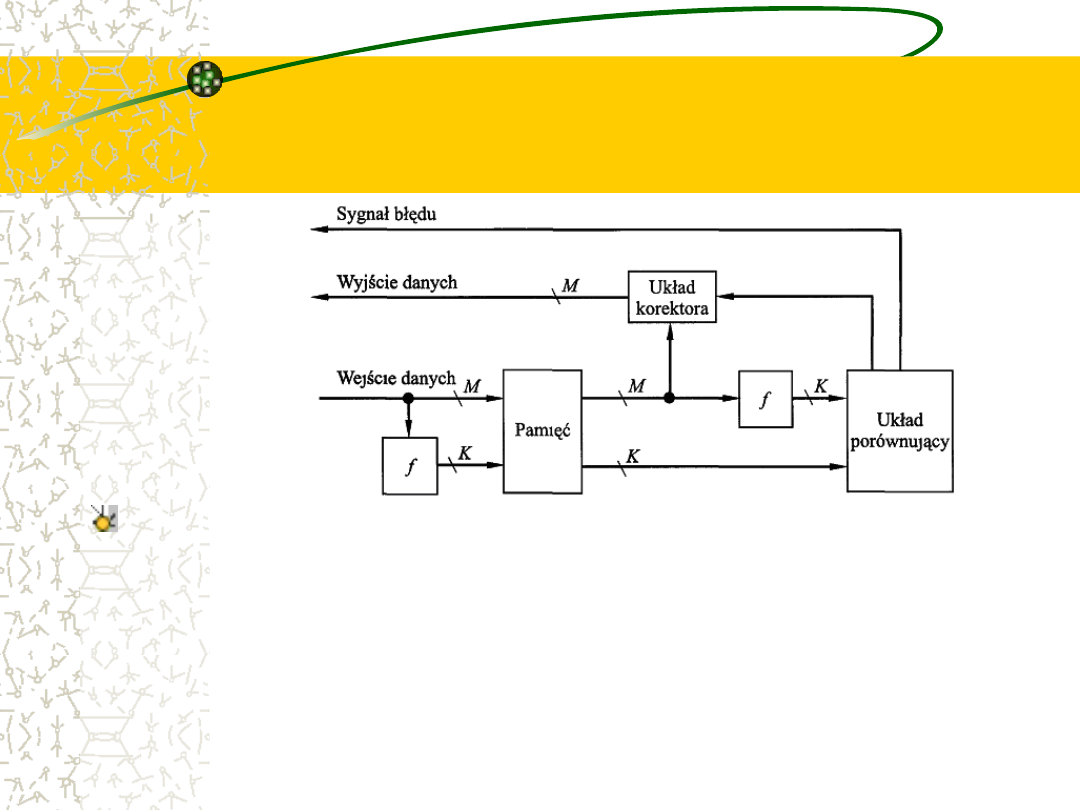
Działanie kodu
korekcyjnego
Na rysunku jest pokazane w sposób ogólny, jak ten proces
jest przeprowadzany. Gdy dane mają być wczytane do
pamięci, przeprowadza się na tych danych obliczenia,
określane jako funkcja f, w celu utworzenia kodu do korekty
błędów. Zarówno kod, jak i dane są przechowywane. W
rezultacie, jeśli ma być zapisane M-bitowe słowo danych, a
kod ma długość K bitów, to aktualna długość
przechowywanego słowa wynosi M+K bitów.
Możliwe wynik: nie ma
błędów, korekta lub
sygnalizacja
Gdy uprzednio zmagazynowane słowo jest odczytywane, kod
jest wykorzystywany do wykrywania i ewentualnej korekty
błędów. Generowany jest nowy zestaw K bitów kodowych z M
bitów danych, po czym porównuje się go z pobranymi bitami
kodowymi. Porównanie prowadzi do jednego z trzech wyników:
Nie wykryto żadnych błędów. Pobrane bity danych są wysyłane.
Wykryto błąd, którego korekta jest możliwa. Bity danych i bity
korekty błędu są doprowadzane do układu korektora, który
tworzy poprawiony zestaw M bitów przeznaczony do wysłania.
Wykryto błąd niemożliwy do poprawienia. Stan ten jest
zgłaszany.
Kody korekcyjne
Kody funkcjonujące w ten sposób są
określane jako kody korekcyjne. Kod
jest charakteryzowany przez liczbę
błędów bitowych w słowie, którą może
on wykryć i poprawić.
Najprostszym kodem korekcyjnym jest
kod Hamminga, opracowany przez
Richarda Hamminga z Bell Laboratories.
Ale o tym już następnym razem...
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
Wyszukiwarka
Podobne podstrony:
Architektura i organizacja komuterów W6 Pamięć wewnętrzn
Architektura i organizacja komuterów W6 Pamięć zewnętrzna
Architektura i organizacja komuterów W7 Pamięć zewnętrzn
Architektura i organizacja komuterów W3 Działanie komput
Architektura i organizacja komuterów W1 Co to jest i skąd to się wzięło
Architektura i organizacja komuterów W4 Połączenia magistralowe
Architektura i organizacja komuterów W4 Połączenia magis
Architektura i organizacja komuterów W7 Wejście Wyjście
Architektura i organizacja komuterów W3 Działanie komputera
Architektura i organizacja komuterów W9 Wspieranie systemu operacyjnego
Architektura i organizacja komuterów 11 Procesor
Architektura i organizacja komuterów W8 Wejście Wyjście
Architektura i organizacja komuterów W9 Procesor
Architektura i organizacja komuterów W1 i 2 Co to jest i skąd to się wzięło
Architektura i organizacja komuterów W2 Ewolucja i wydaj
Pamiec wewnetrzna id 348371 Nieznany
Zarządzanie pamięcią wewnętrzną
więcej podobnych podstron