
Programowanie liniowe
dr inż. Jarosław Prońko
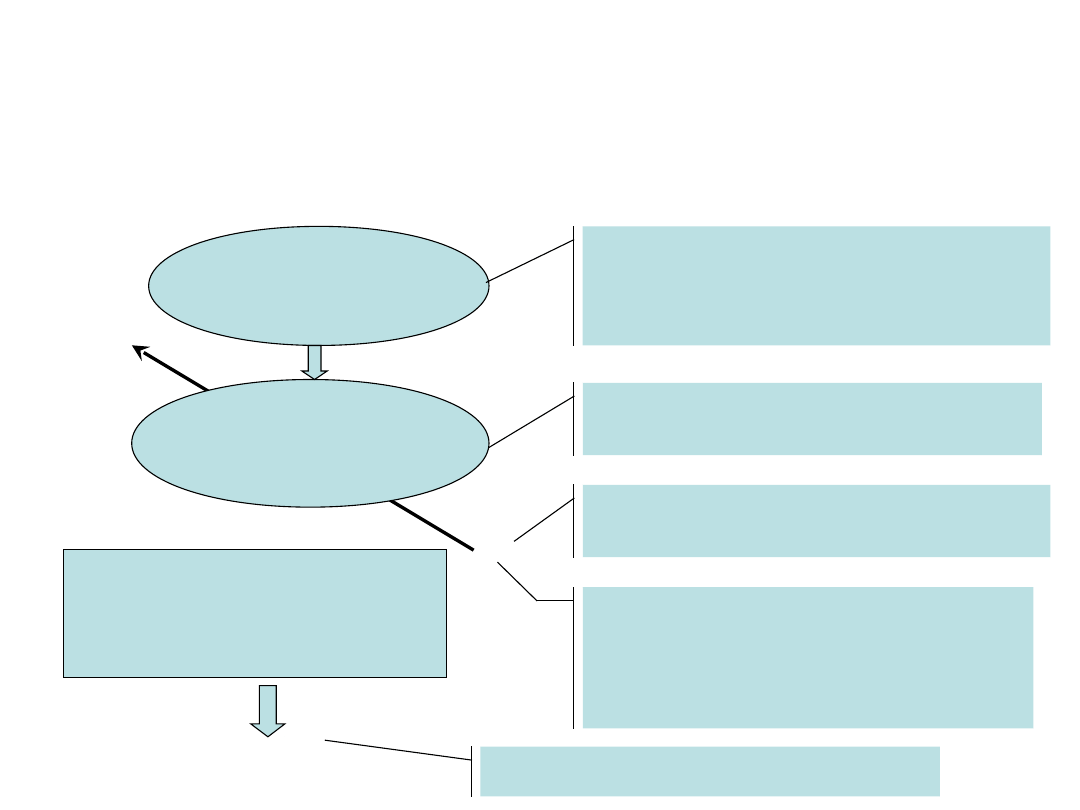
Proces podejmowania
decyzji
Fragment Rzeczywistości
Sytuacja decyzyjna
Coś co zmusza nas do działania
– podjęcia decyzji
Model rzeczywistości
Myślowa reprezentacja
rzeczywistości – problem
decyzyjny
X
Zmienna decyzyjna
Coś co możemy zmieniać?
Na zmienne nałożone są
ograniczenia?
np.: ilość pieniędzy, czasu
którym dysponujemy
Algorytm
Sposób wyszukiwania
Rozwiązań spełniających
ograniczenia i kryteria wyboru
X
1
Rozwiązanie - decyzja

Model rzeczywistości
programowanie matematyczne
max
min
,
,
,
2
1
n
x
x
x
f
Modelem rzeczywistości w programowaniu matematycznym jest funkcja celu,
która łączy zmienne decyzyjne x
i
z celem jaki zamierzamy osiągnąć.
Przy nałożonych na zmienne decyzyjne ograniczeniach, które najczęściej
zapisujemy w postaci:
i
n
i
i
n
i
i
n
i
b
x
x
x
h
b
x
x
x
h
b
x
x
x
h
,
,
,
,
,
,
,
,
,
2
1
2
1
2
1
.
,
,
1
,
,
1
,
,
,
2
,
1
u
p
i
p
r
i
r
i
Oraz ograniczeń logicznych
i
d
.
,
,
1
r
u
i
Które najczęściej przyjmują postać żądania nieujemności zmiennych decyzyjnych,
lub aby były one całkowitoliczbowe.

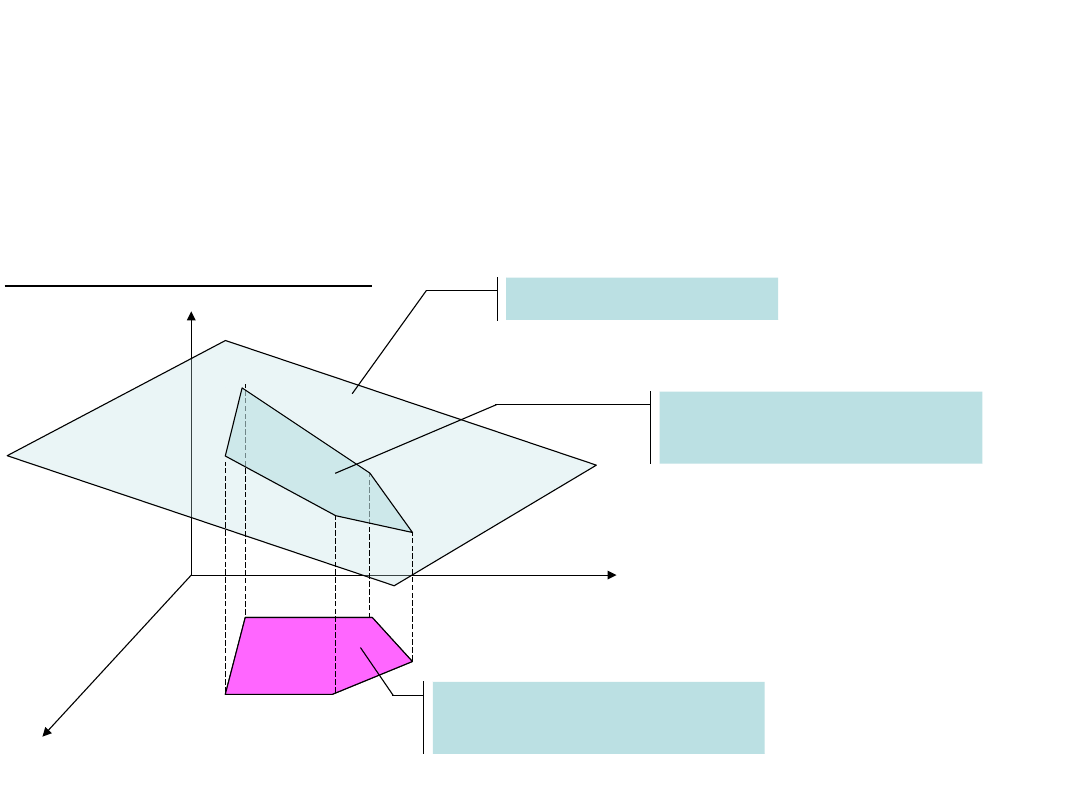
Programowanie matematyczne dla
dwóch zmiennych
x, y – zmienne decyzyjne
F(x,y) – funkcja celu
X
0
Y
0
– zbiór rozwiązań dopuszczalnych
Y
Y
y
X
X
x
y
x
F
0
0
,
min
Standardowe zadanie
optymalizacji
Programowanie liniowe
Jeżeli wszystkie funkcje programowania matematycznego przyjmą postać
funkcji liniowych to takie zadanie optymalizacji nazywamy
programowaniem liniowym
x
y
F(x,y)
Funkcja celu
Ograniczenia
zmiennych
decyzyjnych
Obszar poszukiwania
ekstremum funkcji
celu
2
2
1
1
min
x
c
x
c
z
0
,
2
1
5
2
52
1
51
4
2
42
1
41
3
2
32
1
31
2
2
22
1
21
1
2
12
1
11
x
x
b
x
a
x
a
b
x
a
x
a
b
x
a
x
a
b
x
a
x
a
b
x
a
x
a
Programowanie liniowe
dwie zmienne decyzyjne
min
)
,
(
2
2
1
1
2
1
x
c
x
c
x
x
f
0
,
2
1
3
2
32
1
31
2
2
22
1
21
1
2
12
1
11
x
x
b
x
a
x
a
b
x
a
x
a
b
x
a
x
a
x
1
x
2
1
2
12
1
11
b
x
a
x
a
12
1
12
1
2
1
2
12
1
,
0
0
a
b
A
a
b
x
b
x
a
x
12
1
,
0
a
b
A
,
0
,
11
1
a
b
B
Programowanie liniowe
dwie zmienne decyzyjne
min
)
,
(
2
2
1
1
2
1
x
c
x
c
x
x
f
0
,
2
1
3
2
32
1
31
2
2
22
1
21
1
2
12
1
11
x
x
b
x
a
x
a
b
x
a
x
a
b
x
a
x
a
x
2
1
2
12
1
11
b
x
a
x
a
12
1
12
1
2
1
2
12
1
,
0
0
a
b
A
a
b
x
b
x
a
x
e
f
d
x
1
12
1
,
0
a
b
A
,
0
,
11
1
a
b
B
d
,
0
,
11
1
a
b
B
,
0
,
11
1
a
b
B
,
0
,
11
1
a
b
B
d
,
0
,
11
1
a
b
B
d
,
0
,
11
1
a
b
B
d
,
0
,
11
1
a
b
B
d
,
0
,
11
1
a
b
B
12
1
,
0
a
b
A
d
,
0
,
11
1
a
b
B
Programowanie liniowe
dwie zmienne decyzyjne
min
)
,
(
2
2
1
1
2
1
x
c
x
c
x
x
f
0
,
2
1
3
2
32
1
31
2
2
22
1
21
1
2
12
1
11
x
x
b
x
a
x
a
b
x
a
x
a
b
x
a
x
a
x
1
x
2
Gradient – operator różniczkowy,
Przyporządkowujący polu skalarnemu,
Pole wektorowe, wskazujące kierunek
największego wzrostu funkcji
w danym punkcie
2
1
2
1
,
)
,
(
x
f
x
f
x
x
f
2
1
2
1
,
)
,
(
c
c
x
x
f
f
12
1
,
0
a
b
A
d
,
0
,
11
1
a
b
B
e
f
Programowanie liniowe
dwie zmienne decyzyjne
x
1
x
2
f
f
f
min
max
12
1
,
0
a
b
A
d
,
0
,
11
1
a
b
B
f
e
f
3
2
32
1
31
2
2
22
1
21
min
b
x
a
x
a
b
x
a
x
a
f
e
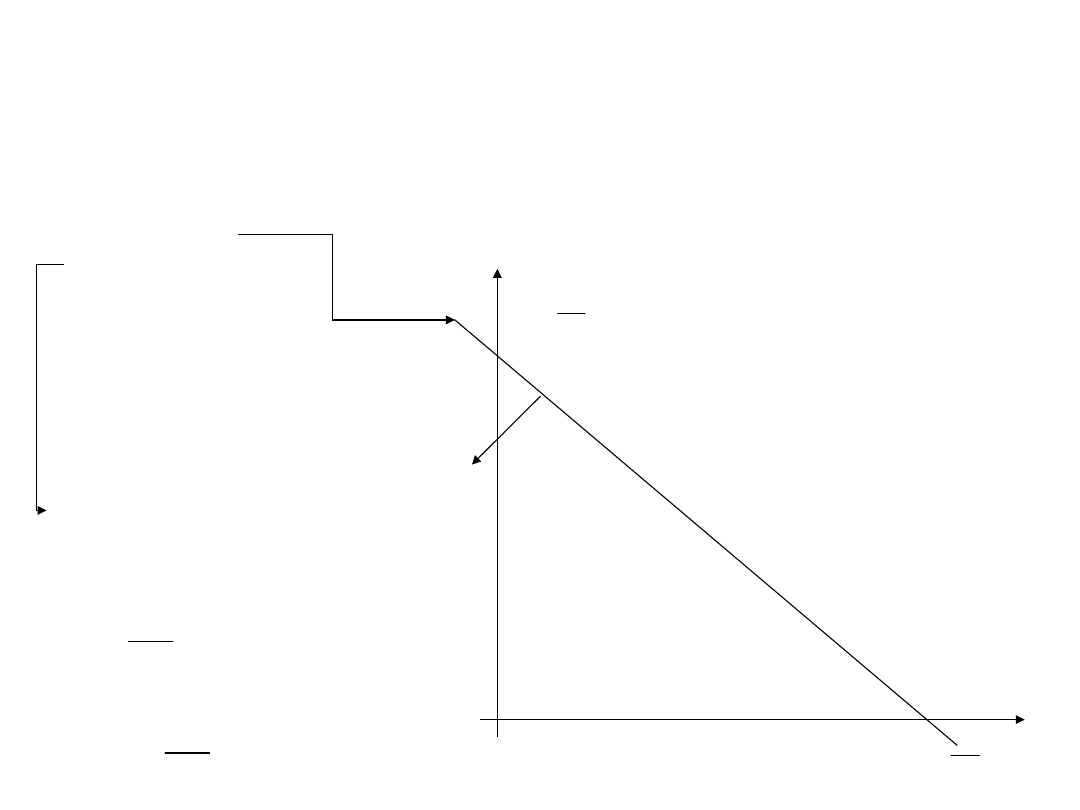
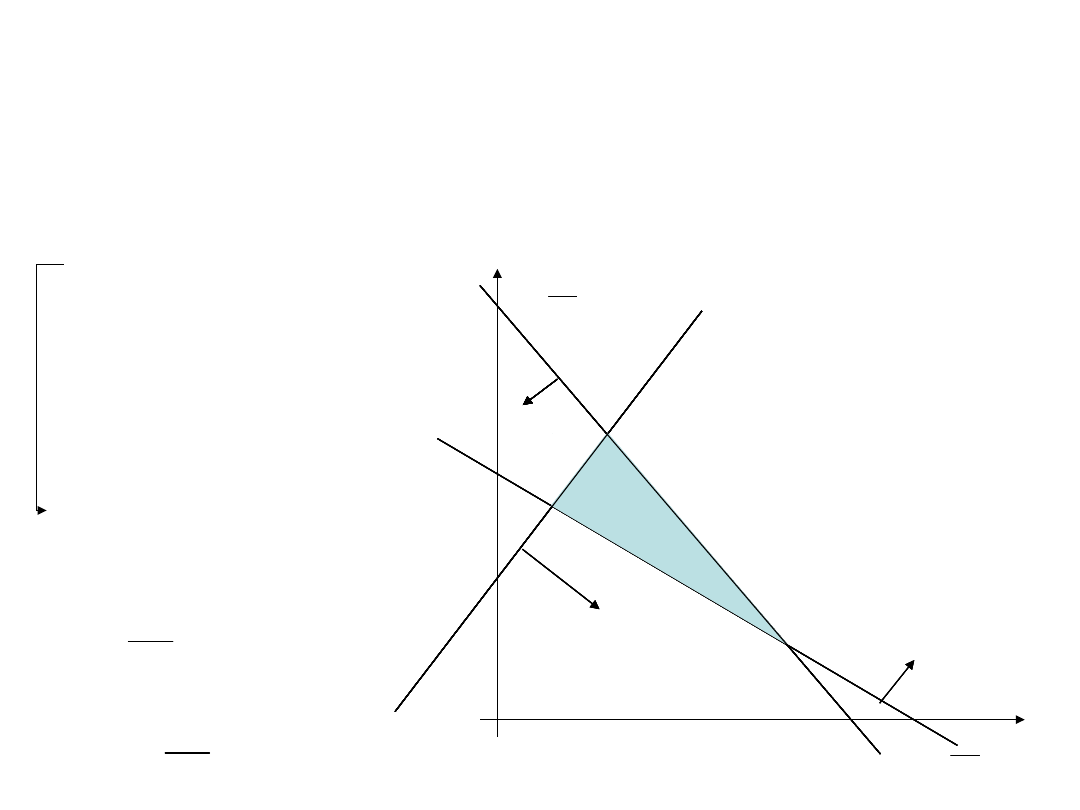
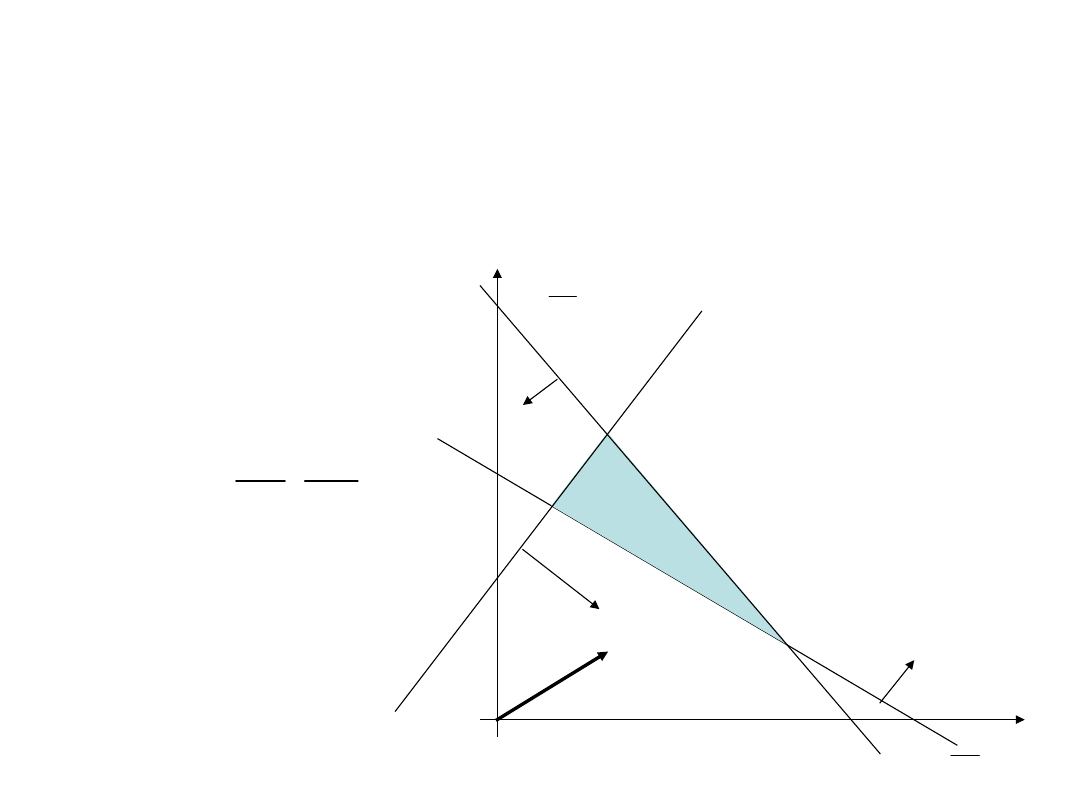
Metoda graficzna
Algorytm metody graficznej
• Na płaszczyźnie zmiennych decyzyjnych rysujemy
obszar ograniczeń.
• Wyznaczamy gradient funkcji celu.
• Rysujemy gradient i prostą prostopadłą do niego - l.
• Przesuwamy prostą l w kierunku wskazanym przez
gradient.
• Funkcja celu ma najmniejszą wartość w pierwszym
punkcie, napotkanym przez prostą l, w obszarze
ograniczeń.
• Funkcja celu ma największą wartość w ostatnim
punkcie, napotkanym przez prostą l, w obszarze
ograniczeń.

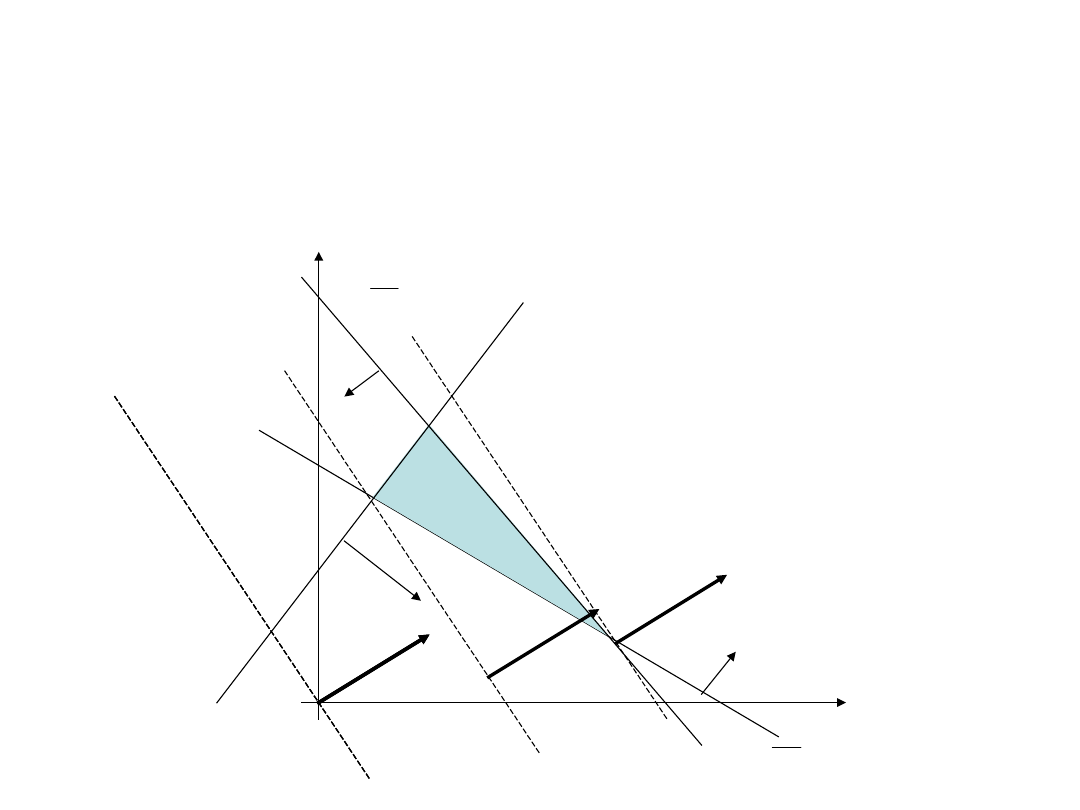
Metoda graficzna
• Pozwala rozwiązać programowanie liniowe dla 2
zmiennych decyzyjnych.
• Wskazuje, ze rozwiązanie programowania liniowego
znajduje się w wierzchołkach obszaru ograniczeń.
• lub ewentualnie na jednym z jego brzegów, jeżeli
jest on prostopadły do gradientu funkcji celu.
• Rozwiązując zadanie programowani liniowego dla
większej liczby zmiennych decyzyjnych należałoby:
– wyznaczyć wierzchołki obszaru ograniczeń – rozwiązać
układ równań opisujących ograniczenia,
– Obliczyć wartość funkcji celu w wyznaczonych punktach,
– Wybrać największą lub najmniejszą.

Uogólniona postać programowania liniowego
Podstawowe twierdzenia
1. Zadanie, w którym maksymalizuje się funkcję celu można zawsze zastąpić
zadaniem, w którym minimalizuje się funkcję przeciwną, przy tych
samych ograniczeniach
f
f
max
min
2. Prawdziwe są następujące zależności:
0
,
,
,
,
,
,
1
1
2
1
2
1
n
i
n
n
i
i
n
i
x
b
x
x
x
x
h
b
x
x
x
h
0
,
,
,
,
,
,
1
1
2
1
2
1
n
i
n
n
i
i
n
i
x
b
x
x
x
x
h
b
x
x
x
h

Uogólniona postać programowania liniowego
Podstawowe twierdzenia
3. Jeżeli warunki logiczne dotyczą nieujemności wszystkich zmiennych
decyzyjnych to nazywamy je kompletnymi.
4. Jeżeli na którąś ze zmiennych decyzyjnych nie nałożony warunku nieujemności
to możemy to zrobić poprzez zastąpienie jej dwoma zmiennymi nieujemnymi
0
0
2
1
2
1
k
k
k
k
k
x
x
x
x
x
Uwzględniając powyższe zależności każdą postać zadania programowania
liniowego możemy sprowadzić do postaci standardowej, w której:
1. Minimalizujemy funkcję celu
2. Warunki ograniczające podane są w postaci układu równań o nieujemnych
wyrazach wolnych.
3. Wszystkie zmienne decyzyjne są nieujemne.

Standardowa postać zadania
programowania liniowego
Wyznaczyć:
n
n
x
c
x
c
x
c
z
2
2
1
1
min
Przy warunkach:
0
2
2
1
1
2
2
2
22
1
21
1
1
2
12
1
11
i
m
n
mn
m
m
n
n
n
n
x
b
x
c
x
c
x
a
b
x
c
x
c
x
a
b
x
c
x
c
x
a

Standardowa postać zadania
programowania liniowego
w postaci wektorowej
Znaleźć taki nieujemny wektor:
Którego współrzędne spełniają równanie wektorowe:
n
x
x
x
X
2
1
B
X
A
m
n
mn
m
m
n
n
b
b
b
x
x
x
a
a
a
a
a
a
a
a
a
2
1
2
1
2
1
2
22
21
1
12
11
A iloczyn CX osiąga wartość najmniejszą
n
n
x
x
x
c
c
c
X
C
2
1
2
1

Metoda Simpleks
0
0
0
0
2
1
2
1
2
1
2
1
2
22
21
1
12
11
n
n
n
mn
m
m
n
n
b
b
b
z
x
x
x
c
c
c
a
a
a
a
a
a
a
a
a
Algorytm simpleks:
1. Konstruujemy dopuszczalne rozwiązanie wstępne – sprowadzenie
układu do postaci bazowej (macierz rozszerzona), przy czym wartość z
zawsze musi być wartością bazową.
2. Sprawdzenie spełnienia kryterium minimalności – wszystkie, wartości
w ostatnim wierszu macierzy są nie dodatnie.
3. Jeżeli nie to konstruujemy następny rozwiązanie dopuszczalne
i sprawdzamy kryterium.

Przykład
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
Wyszukiwarka
Podobne podstrony:
choroby wirus i bakter ukł odd Bo
1 bo
BO WYKLAD 03 2
chlamydiofiloza bo i ov
BO I WYKLAD 01 3 2011 02 21
bo mój skrypt zajebiaszczy
BO WYK2 Program liniowe optymalizacja
2 BO 2 1 PP Przykłady Segregator [v1]
PB BO W1
Odp z BO
POLITECHNIKA BIAŁOSTOCKA, NAUKA, Politechnika Bialostocka - budownictwo, Semestr III od Karola, Budo
51 - BO Z DZIEWCZYNAMI, Teksty piosenek
egzamin Bo ena Koz owska - Praca z dzieckiem z Zespo, PWSZ Tarnów Filologia polska II rok, PWSZ Tran
BO projekt nr 1, Guzek
BO
bo
BO OKLADKA 1 CZESCI
więcej podobnych podstron