
Dyski twarde
W napędach dysków elastycznych głowica
odczytu-zapisu jest przykładana bezpośrednio do
wirującego dysku. Z tego też powodu,
stosowane prędkości obrotowe są niewielkie, a
więc i szybkości zapisu/odczytu są ograniczone.
Dyski twarde (nazwane tak z powodu swej
sztywnej konstrukcji) umieszczone są w
odpowiednio skonstruowanym pyłoszczelnym
zespole napędowym, zawierającym ponadto
układy sterowania silnikiem napędu dysków,
silnikiem przesuwu głowic (pozycjonerem),
układy sterowania głowicami zapisu, układy
odczytu oraz inne układy sterujące i kontrolne
zespołu napędowego.

Na ogół nie ma tu możliwości wymiany dysków.
Dysk twardy odróżniają od dysku elastycznego
następujące cechy:
•głowica odczytu-zapisu, nie dotyka dysku w
czasie pracy, jest bowiem utrzymywana w małej
odległości od niego (mniejszej niż 1μm) na
poduszce powietrznej powstającej automatycznie
na skutek ruchu obrotowego,
•prędkość obrotowa dysku twardego jest bardzo
duża, dzięki temu osiąga się duże prędkości
transmisji danych (kilku - kilkudziesięciu MB/s),
•ponieważ dysk twardy jest niewymiennym
nośnikiem danych, można go dokładnie
wycentrować i osiągnąć przy tym dużą liczbę
ścieżek, czyli dużą pojemność (kilkudziesięciu
gigabajtów).

Najważniejsze parametry techniczne dysków
twardych, dostępnych obecnie na rynku:
•pojemność (kilkadziesiąt GB do kilkuset GB),
•liczba głowic odczytu/zapisu (od kilku do
kilkudziesięciu),
•liczba cylindrów (kilka tysięcy) - ścieżki o tych
samych numerach na powierzchniach roboczych
dysków nazywane są cylindrami,
•średni czas dostępu (kilka milisekund) - na średni
czas dostępu (ang. Average Access Time) składają
się dwa elementy: średni czas poszukiwania
potrzebny do umieszczenia głowicy na wybranym
cylindrze (ang. Average Seek Time) oraz
opóźnienie rotacyjne potrzebne do umieszczenia
głowicy nad odpowiednim sektorem (ang.
Rotalional Latency), które przy szybkości dysków
równej 7200 obr/min wynosi ok. 4 milisekundy,

•prędkość obrotowa dysku (5400, 7200, 10000
obrotów na minutę),
•szybkość transmisji danych (kilka - kilkadziesiąt
megabajtów/sekundę),
•wielkość bufora cache (pamięć buforowa
kontrolera dysku: 128 KB - 2 MB),
•zasilanie (+12V,+5V),
•moc pobierana (od kilku do kilkunastu watów).
Najważniejsze parametry dysków,
interesujące użytkownika to:
•pojemność dysku,
•szybkość transmisji (tzw. transfer lub
przepustowość)
•średni czas dostępu.

Napęd dysków twardych (ang. Hard Disk
Drive, HDD) łączony jest z systemem
mikroprocesorowym (z płytą główną) poprzez
sterownik dysku twardego (ang. Hard Disk
Controller, HDC) za pomocą interfejsu HDD.
Firmy produkujące pamięci masowe,
proponują typy interfejsów łączących dyski
twarde ze sterownikami: interfejs E-IDE
(ATA), SCSI oraz S-ATA. Oczywiście każdy
z wymienionych tu interfejsów wymaga
innego sterownika i innego dysku twardego.
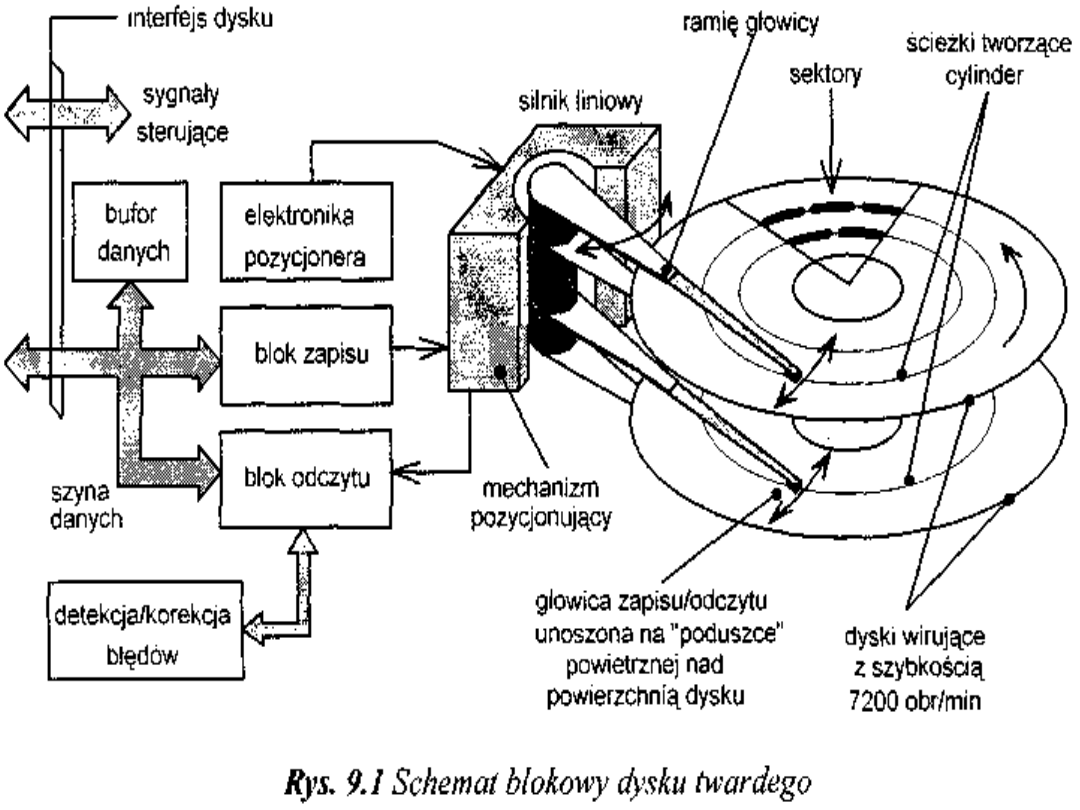
Mechanizm dysku twardego składa się z
następujących komponentów: obudowy,
pozycjonera głowicy, ramion głowic, głowic
odczytu/zapisu oraz kilku dysków.

Każdemu dyskowi pamięci przyporządkowane są
dwie głowice (dla jego dolnej i górnej powierzchni).
Głowice utrzymywane są na sprężynujących
ramionach, przy czym wszystkie ramiona głowic są
ze sobą połączone i poruszają się synchronicznie,
napędzane pozycjonerem. W stanie spoczynku
głowice znajdują się na ścieżce parkującej dysku. W
momencie, gdy dysk zaczyna wirować, poduszka
powietrzna wytworzona przy powierzchni, unosi
głowice na wysokość mniejszą niż 1 mikrometr.
Zadaniem pozycjonera jest przemieszczenie głowic
na wybrany cylinder. Pozycjonery zbudowane w
oparciu o silnik liniowy (elektromagnetyczny), same
parkują głowice po wyłączeniu zasilania, gdyż
sprężyna automatycznie odciąga je do położenia
parkowania.

Pracą mechanizmu sterują układy elektroniki,
zawierające: blok zapisu, blok odczytu z detekcją
i korekcją błędów oraz sterowanie pozycjonera.
Współczesne dyski wyposażane są w bufor
danych (o pojemności 128 KB - 2 MB), zwany też
dyskową pamięcią podręczną (Cache),
umożliwiający zwiększenie szybkości transmisji.
Aby przyspieszyć transmisję w dyskach z
pamięcią Cache, stosuje się następującą zasadę:
z dysku podczas odczytu wczytuje się do pamięci
Cache, oprócz interesujących nas w danej chwili
sektorów, również sektory następujące po nich.
Jeśli dane te zostaną zażądane nieco później, to
nie muszą być odczytywane z dysku, lecz
przywołane są z pamięci Cache.

Dysk gotowy jest do pracy dopiero wtedy,
gdy zostanie sformatowany przez producenta
lub użytkownika. Formatowanie polega na
podziale dysku na ścieżki i sektory. Jest to
tzw. formatowanie niskiego poziomu lub
formatowanie fizyczne.
We współczesnych dyskach, dla efektywnego
wykorzystania ich powierzchni, co wiąże się
ze zwiększeniem pojemności, ścieżki
zewnętrzne dzielone są na większą liczbę
sektorów (np. 300 sektorów), gdyż mogą
pomieścić większą ilość informacji (te ścieżki
są po prostu dłuższe), a ścieżki leżące bliżej
środka dysku zawierają mniej sektorów (np.
200). Technika ta nosi nazwę Zone Bit
Recording - ZBR.
Stąd też na tych dyskach liczba sektorów
na ścieżkę nie jest wartością stałą. Na
systematyczny wzrost pojemności,
produkowanych współcześnie dysków,
mają wpływ coraz większe gęstości
upakowania informacji na jednostkę
powierzchni, dzięki coraz doskonalszym
nośnikom magnetycznym, głowicom
zapisu/odczytu oraz ciągle ulepszanym
metodom kodowania zapisywanych
danych. Współczesne dyski osiągają
gęstość upakowania wynoszącą 1 gigabit
na cal kwadratowy.

W nowoczesnych konstrukcjach zastosowano
zespół głowic zapisu/odczytu, składający się z
cienkowarstwowej magnetycznej głowicy zapisu,
wyposażonej w miniaturową cewkę o niewielkiej
indukcyjności (więc o małej bezwładności) oraz z
magnetorezystywnej (MR) głowicy odczytu, w
której wykorzystywane są zmiany rezystancji
specjalnego materiału magnetycznego pod
wpływem zmian pola magnetycznego. Głowice
MR posiadają zdecydowanie większą czułość od
głowic tradycyjnych z cewkami, mogą więc
odczytywać słabsze pola magnetyczne
(pochodzące od mniejszych, bardziej
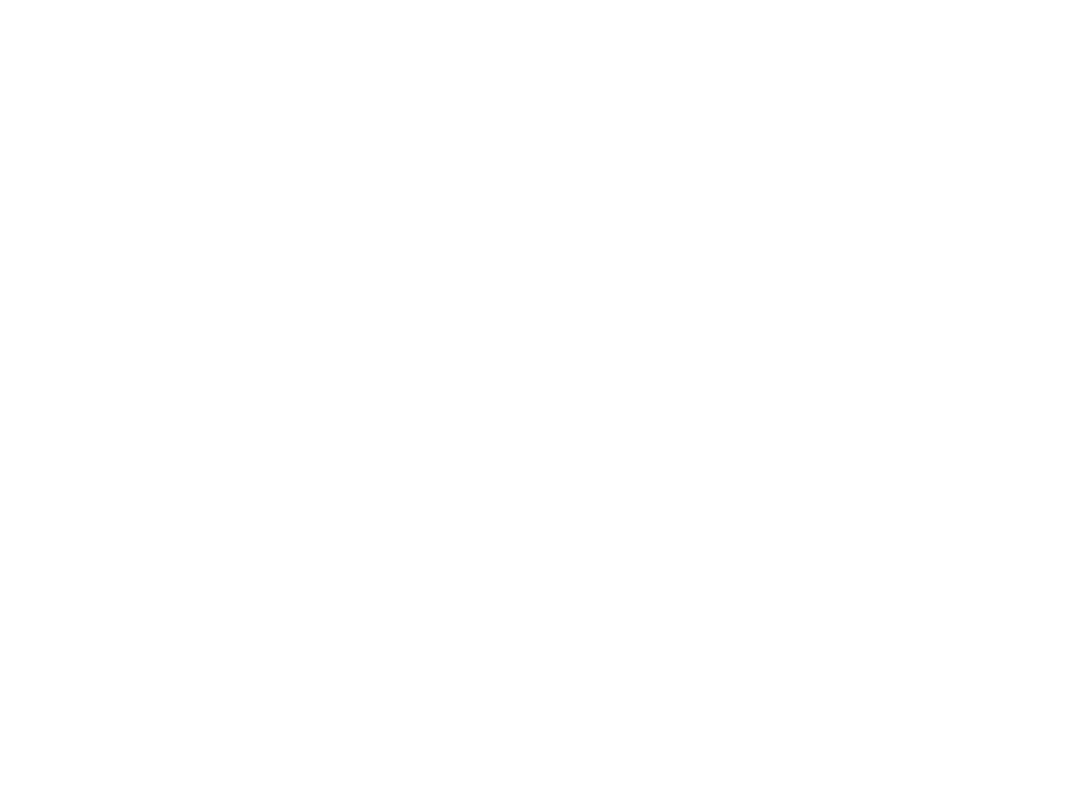
upakowanych domen). Dotychczasowe metody
odczytu informacji z dysku polegały na
wykrywaniu wierzchołków odczytywanych sił
elektromotorycznych (tzw. Peak Detectiori).

Przy wysokiej gęstości zapisu oraz dużej prędkości
obrotowej dysków mogą powstawać zniekształcenia
tych wierzchołków. Nowa metoda odczytu - zwana
metodą PRML pozwala bezbłędnie rozpoznać
szczyt sygnału sem mimo występujących zakłóceń.
Metoda ta wykorzystuje dwa mechanizmy: Partial
Response i Maximum Likelihood.
Technika Partial Response polega na próbkowaniu
analogowego sygnału odczytywanego przez
głowicę MR za pomocą przetwornika A/C. Na
podstawie uzyskanych próbek specjalny układ
wyposażony w procesor DSP, korzystając z metody
największego prawdopodobieństwa (Maximum
Likelihood) określa miejsce położenia wierzchołka
sem. Dzięki tej nowej technologii możliwe jest
zmniejszenie wymiarów domen magnetycznych a
więc wzrost gęstości zapisu

Następny niezwykle ważny parametr - szybkość
transmisji - jest funkcją prędkości obrotowej
dysków, która osiąga we współczesnych
konstrukcjach 7200 obrotów na minutę (chociaż
są już dyski wirujące z szybkością 10000
obr/min). Obliczmy chwilową szybkość transmisji
dla hipotetycznego dysku wirującego z
szybkością 5400 obr/min. (90 obr/s) i
posiadającego 300 sektorów 512 bajtowych na
zewnętrznej ścieżce: 90 (obr/sek) x 300
(sektorów) x 512 (bajtów) = 13,824 MB/s (ok. 110
Megabitów/s). Dane odczytywane z dysku z tą
szybkością, ładowane są do bufora, a następnie
przesyłane za pomocą szyn interfejsu do pamięci
operacyjnej komputera. Przepustowość interfejsu
nie może być więc mniejsza, niż szybkość
odczytu danych z dysku.

Od prędkości obrotowej dysków zależy
również opóźnienie (ang. latency) w
dostępie do wybranego sektora. Im
większa prędkość wirowania dysku tym
krótsze opóźnienie rotacyjne. Ważnym
parametrem jest czas przejścia głowicy
ze ścieżki na ścieżkę, zwłaszcza przy
transmisji dużych plików. Dlatego też
konstruktorzy dysków nieznacznie
opóźnili początki kolejnych ścieżek, tak
by po przeczytaniu całej ścieżki głowica
zdążyła przesunąć się na ścieżkę
następną i trafić na jej początek (technika
ta nosi nazwę Cylinder Skewing).

Współczesne dyski mają wbudowany system
zarządzania poborem mocy (ang. Power
Management), który powoduje wyłączenie
silnika dysku i zaparkowanie głowic, po pewnym
(określonym przez producenta) czasie od
momentu ostatniej operacji we/wy wykonanej
na dysku. Fakt przejścia dysku najpierw w stan
jałowy (ang. Idle), a następnie uśpienia (ang.
Sleep lub Standby) powoduje znaczące
zmniejszenie poboru mocy. Producenci dysków
różnie te stany definiują; faktem jest jednak, iż
system Power Management powoduje nawet
czterokrotne zmniejszenie poboru mocy przez
nie używany dysk.

Większość współczesnych dysków
dysponuje już funkcją, tzw. S.M.A.R.T.
(ang. Self-Monitoring Analysis and
Reporting Technology) polegającą na tym,
że elektronika dysku monitoruje i
analizuje oraz raportuje stan urządzenia
(np. wysokość lotu głowicy, czas
uzyskania nominalnej prędkości
obrotowej, itd.). Jeśli postępuje
degradacja tych wielkości, układy kontroli
wysyłają wtedy ostrzeżenie do
użytkownika, że dysk może ulec
uszkodzeniu.

Dyski z interfejsem E-IDE
Interfejs IDE wprowadzono w połowie lat
osiemdziesiątych, po raz pierwszy w
komputerach IBM PC AT (ang, Advanced
Technology). Standard ten (któremu
nadano również nazwę ATA - AT
Attachment) wyposażono w 16-bitową
szynę danych, z myślą o współpracy z
magistralą ISA. Dyski z interfejsem IDE
posiadają zintegrowaną z mechanizmem
elektronikę: układy zapisu i odczytu
danych oraz układy sterowania (stąd
nazwa interfejsu IDE - IntegratedDrive
Electronics).

Dyski IDE/ATA pierwotnie mogły osiągnąć
maksymalną pojemność równą 504 MB.
Ograniczał tę wartość BIOS starszych
komputerów IBM PC. Ze względu na niską
przepustowość magistrali ISA, szybkość
transmisji danych nie mogła być większa
niż 8,33 MB/s. Interfejs pozwalał dołączyć
do systemu dwa dyski twarde.
Współczesne dyski (tak jak wszelkie
urządzenia peryferyjne) mogą
współpracować z pamięcią operacyjną
komputera (czyli wykonywać operacje
wejścia/wyjścia) na dwa sposoby:

- pod nadzorem procesora (sygnały sterujące
i adresy, niezbędne do przesłania informacji
do/z pamięci operacyjnej generowane są
przez procesor - ten sposób operacji zwany
jest trybem PIO - ang. Programmed
Input/Outpuf); w trakcie tej czynności
procesor nie może wykonywać żadnych
innych operacji - fakt ten spowalnia pracę
komputera.
- bezpośredni dostęp do pamięci (ang. Direct
Memory Access - DMA) podczas którego
wymiana informacji pomiędzy pamięcią
operacyjną a urządzeniem peryferyjnym
zachodzi bez udziału procesora (który w tym
czasie może wykonywać inne operacje);

Sterowanie operacją wejścia/wyjścia
realizowane jest przez specjalny układ
zwany kontrolerem DMA.
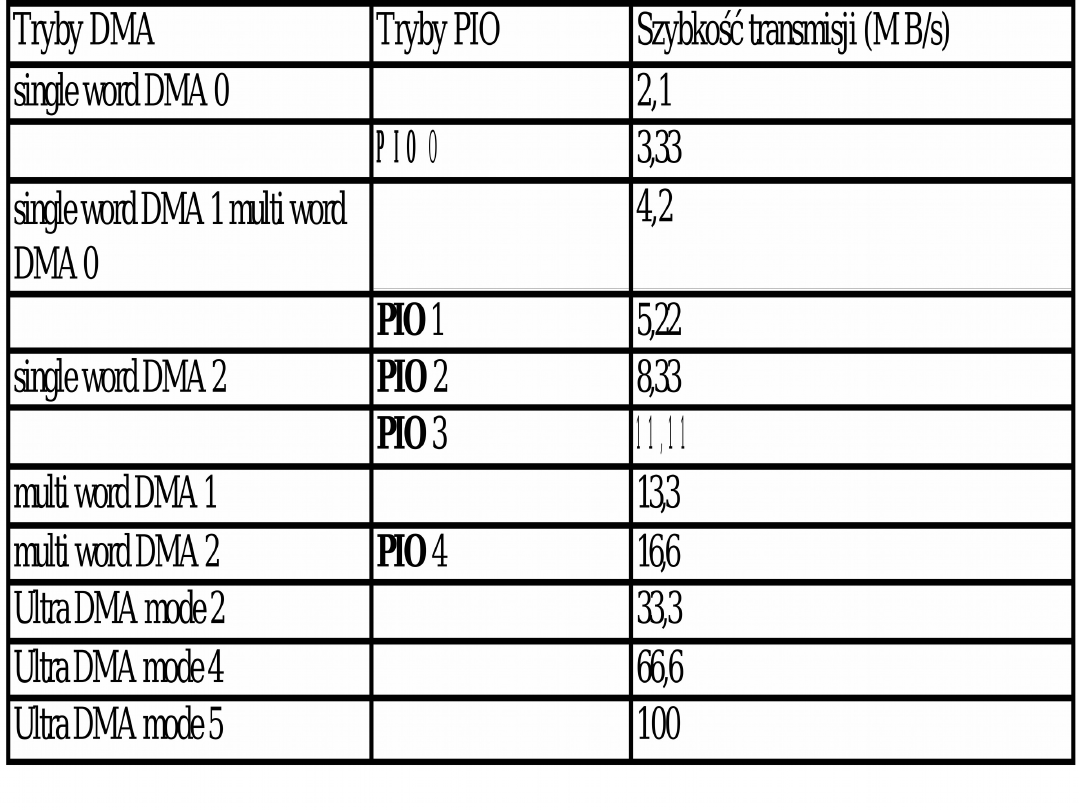
Dla dysków z interfejsem IDE opracowano
wiele protokołów wymiany informacji z
pamięcią operacyjną; są to protokoły PIO
oraz protokoły DMA (tzw. jednosłowowy
bezpośredni dostęp do pamięci - ang.
single word DMA i wielosłowowy, szybszy -
ang. multiword DMA). Nazwy tych
protokołów (trybów pracy) oraz
odpowiadające im szybkości transmisji
danych pokazano w poniższej tabeli.

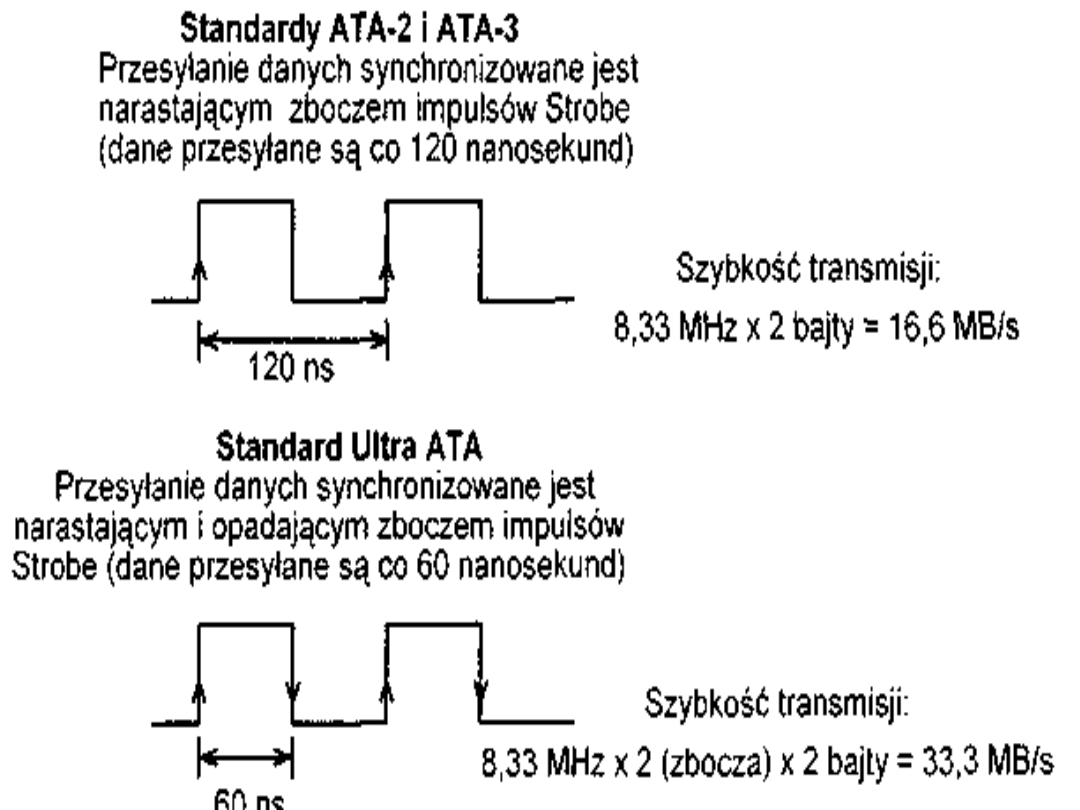
Wraz z opracowaniem nowych protokołów
transmisji i nowych metod adresacji danych,
przechowywanych na dysku, stworzone zostały
nowe standardy (wg zasady, iż każdy nowy
standard jest kompatybilny ze swoimi
poprzednikami): ATA-2, ATA-3, ATAPI, Ultra ATA,
E-IDE.
Interfejs IDE/ATA i późniejsze jego odmiany
wyposażony jest (od początku swojego
istnienia) w 40-stykowe złącze. Ze złącza tego
usunięto styk 20 by uchronić dysk przed
nieprawidłowym podłączenia kabla. Długość
kabla interfejsu nie powinna przekroczyć 18
cali.
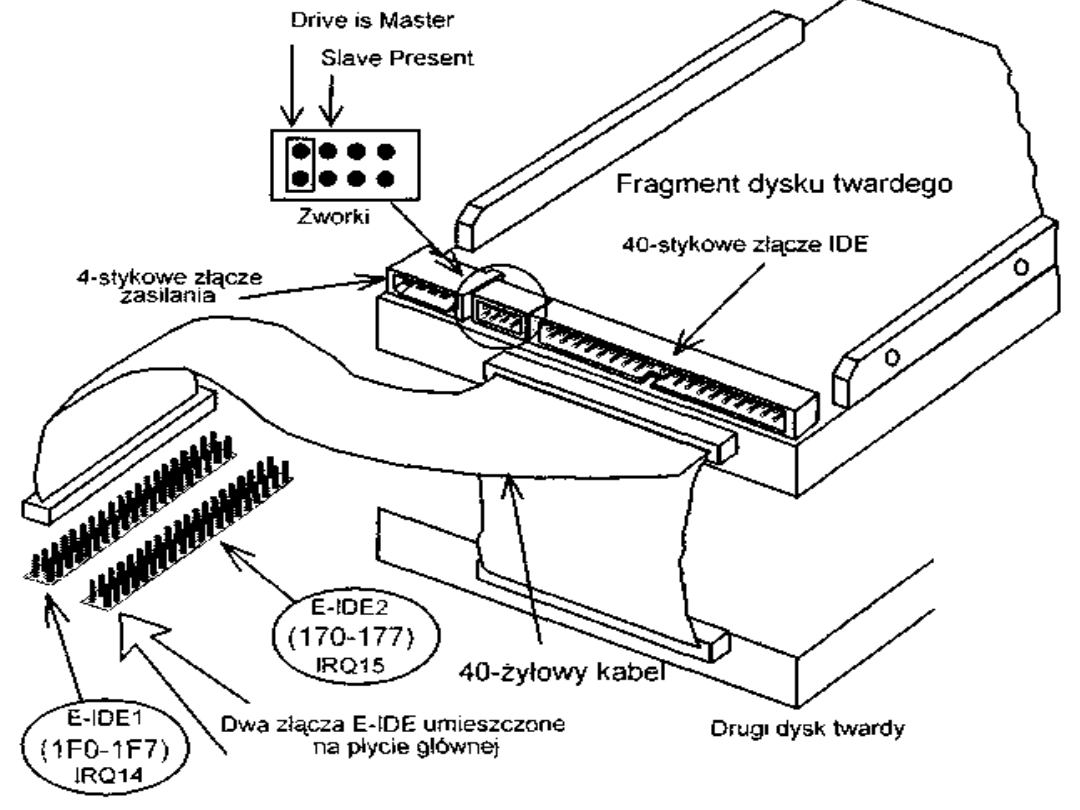

Współczesne płyty główne wyposażane są w dwa
kanały E-IDE (w dwa 40-stykowe złącza), do
których można podłączyć po dwa urządzenia,
które pracują w systemie Master i Slave. Rysunek
ilustruje sposób połączenia dwóch dysków
twardych do jednego ze złącz płyty głównej. Blok
zworek, umieszczonych na każdym dysku,
pozwala skonfigurować te urządzenia. Jeśli do
sterownika będzie dołączony jeden dysk twardy,
wtedy należy zewrzeć zworki MASTER. Jeśli
natomiast w kanale będą pracować dwa dyski
twarde, wtedy na pierwszym należy zewrzeć
zworki MASTER oraz SLAVE PRESENT, na drugim
zaś nie zwierać żadnej z tych zworek. Dysk
wyposażony jest ponadto w 4-stykowe złącze
zasilania.
Protokół multi word DMA i PIO 4

Na dobrą sprawę, rzeczywista maksymalna
szybkość transmisji danych zostaje
rozstrzygnięta pomiędzy głowicą a
powierzchnią dysku. Współczesny dysk twardy
mający ok. 500 sektorów, na zewnętrznej
ścieżce (na ścieżce wewnętrznej ma ich ok.
300 - tam transmisja jest wolniejsza), po 512
bajtów każdy i 7200 obrotów/min (120 obr/s),
może przesłać 120 x 256 000 bajtów w ciągu
sekundy, czyli ok. 30 MB/s. Dane odczytane z
dysku przesyłane są do bufora, z którego
powinny być przynajmniej z taką samą
szybkością przesłane do pamięci operacyjnej -
inaczej bufor dysku się zapełni

Oczywiście w trakcie transmisji dane nie
płyną ciągłym strumieniem, gdyż część
czasu (ok. 50%) zajmuje przesyłanie
rozkazów z procesora do sterownika dysku,
dlatego też szybkość transmisji, pomiędzy
elektroniką dysku a pamięcią operacyjną,
winna być zdecydowanie większa niż
szybkość odczytu danych z powierzchni
dysku.
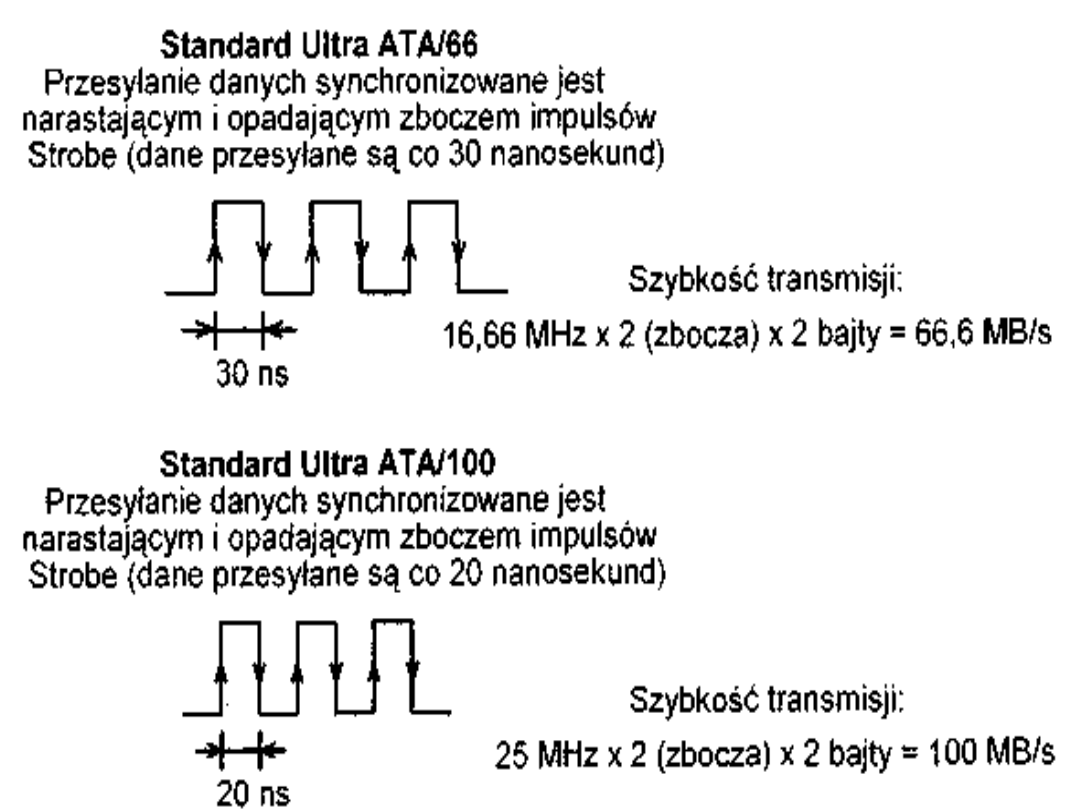
Ważną więc sprawą stało się opracowanie
protokołu transmisji, zapewniającego
szybkość większą niż oferuje tryb Ultra DMA
mode 2. Odpowiedzią producentów na te
potrzeby są właśnie standardy Ultra AT
A/66/100/133, z oferowanymi szybkościami.
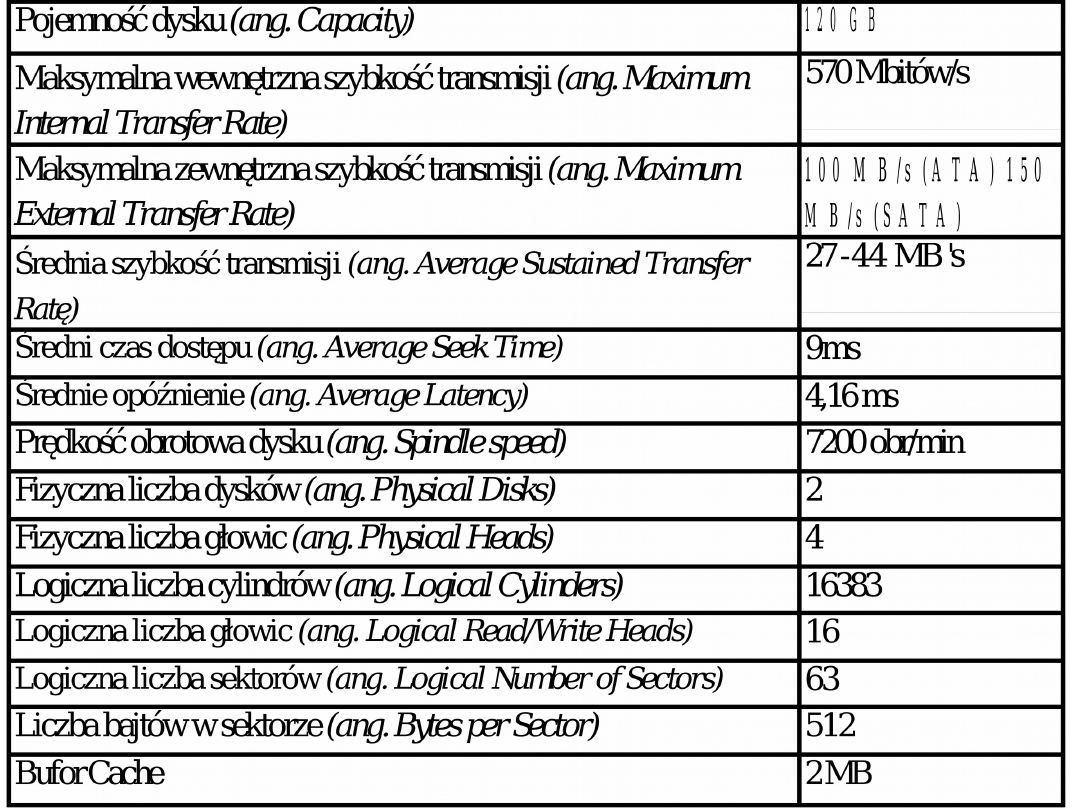

Niektóre prezentowane w tabeli parametry
wymagają komentarza:
- wewnętrzna szybkość transmisji (to
szybkość pomiędzy powierzchnią dysku a
głowicą) jest maksymalna dla ścieżek
zewnętrznych i wynosi 570 Mbitów/s (ok. 71
MB/s); natomiast dla ścieżek położonych
bliżej środka dysku, wewnętrzna szybkość
transmisji jest mniejsza,
- zewnętrzna szybkość transmisji - to
szybkość przesłania danych pomiędzy
kontrolerem dysku a pamięcią operacyjną
(wg. standardu ATA 100- 100 MB/s).
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
Wyszukiwarka
Podobne podstrony:
Dyski twarde-woluminy, Szkoła, Systemy Operacyjnie i sieci komputerowe, systemy, semestr II
Dyski twarde od A do Z Dyski tw Nieznany
03 Dyski Twarde
Dyski twarde i interfejsy dyskowe
Dyski twarde i elastyczne
Dyski twarde
Dyski twarde-konspekt, Szkoła, Systemy Operacyjnie i sieci komputerowe, utk, semestr II
Pamięci masowe-dyski twarde, wrzut na chomika listopad, Informatyka -all, INFORMATYKA-all, Informaty
dyski twarde1
Dyski twarde-konspekt1, Szkoła, Systemy Operacyjnie i sieci komputerowe, utk, semestr II
dyski twarde ssd hd hybrydowe wady i zalety
Dyski twarde, systemy
Kompatybilne dyski twarde
Dyski Twarde HDD
DYSKI TWARDE 2
34 ASK Dyski Twarde (Marek Kobus)
Dyski twarde
Dyski Twarde 4
więcej podobnych podstron